1.
2. 1. Показатели эффективности стрельбы ЗУР
3.
Стрельба ЗУР — это процесс боевой работы расчета боевой машины (батареи),
направленный на выполнение поставленной огневой задачи.
Стрельба ЗУР начинается с момента постановки огневой задачи батарее (БМ)
на уничтожение цели и заканчивается окончанием оценки результатов
обстрела и состоит из подготовки обстрела, обстрела цели и оценки
результатов обстрела.
Задачи стрельбы
Поражение
одиночной
цели
Уничтожение
возможно большого
числа самолетов
в составе групповой цели
4.
Задачи стрельбы
Уничтожение возможно
большого числа самолетов
в составе групповой цели
Поражение
одиночной цели
Вероятность поражения
одиночной цели
одной ракетой
R1
Математическое ожидание
числа пораженных целей
Mn
ПЭС
Вероятность поражения
одиночной цели
очередью из n-ракет
Rn
ПЭС
5.
Боевой эффективностью ЗРК называется степень соответствия результатов
боя батареи (БМ), поставленной боевой задаче по отражению конкретного
удара средств воздушного нападения (СВН). Боевая эффективность ЗРК
зависит главным образом от временных характеристик комплекса, размеров
зоны поражения, параметров налета и слаженности боевых расчетов.
Задачи стрельбы
Поражение
одиночной
цели
Выполнить
огневую
задачу
Уничтожение
возможно большого
числа самолетов
в составе
групповой цели
6.
Задачи
стрельбы
Поражение
одиночной
цели
Вероятность
поражения
одиночной цели
одной ракетой
R1
ПБЭ
Вероятность
поражения
одиночной цели
очередью из n-ракет
Rn
Выполнить
огневую
задачу
Уничтожение
возможно большого
числа самолетов
в составе
групповой цели
Вероятность
выполнения
огневой задачи
Pог.з.
Математическое
ожидание числа
пораженных целей
Mn
ПБЭ
ПБЭ
7. 2. Модель поражения цели
8.
Модель поражения цели
Наведение
(ЗОН)
9.
Модель поражения цели
Наведение
(ЗОН)
Подрыв
(ЗСРв)
10.
Модель поражения цели
Наведение
(ЗОН)
Подрыв
(ЗСРв)
Ущерб
(КЗПЦ)
11.
Модель поражения цели
Наведение
(ЗОН)
Подрыв
(ЗСРв)
Ущерб
(КЗПЦ)
Поражение
цели
12.
Модель поражения цели
Наведение
(ЗОН)
Подрыв
(ЗСРв)
Ущерб
(КЗПЦ)
Поражение
цели
13.
Для получения выражения вероятности поражения цели одной ракетой введем
прямоугольную систему координат
Y
Vp
P
dy
dx
Vp
Vо т н
y
P
Vц
OH
OC
x
O
X
z
Z
За начало координат (точка О) принимаем центр масс цели.
Ось ОХ направлена вдоль вектора относительной скорости сближения ракеты и цели.
Оси OY и OZ лежат в плоскости, перпендикулярной вектору скорости ракеты, и образуют
так называемую картинную плоскость.
Такая система координат позволяет рассматривать цель как неподвижный объект,
относительно которого ракета движется со скоростью Vотн.
Координаты точек разрыва x,y,z являются случайными величинами. Они характеризуют
ошибки стрельбы. Если разрыв боевой части ракеты произошел в точке с
координатами x,y,z то существует некоторая вероятность поражения цели, зависящая
от координат x,y,z.
14.
Поражение цели ЗУР можно представить в виде сложного случайного события,
состоящего из двух случайных событий, происходящих последовательно:
• разрыв боевой части ракеты в точке с координатами x,y,z относительно цели;
• поражение цели элементами боевой части ракеты при условии разрыва ее в точке с
координатами x,y,z.
Первое случайное событие характеризуется плотностью распределения координат точек
разрыва ракет относительно цели f(x,y,z), которая называется законом ошибок
стрельбы.
Второе случайное событие характеризует вероятность поражения цели в зависимости от
координат точек разрыва боевой части ракеты, т.е. функцией G(x,y,z), которая
называется координатным законом поражения цели.
Вероятность разрыва ракеты в строго определенной точке пространства практически
равна нулю. Поэтому вероятность первого события будем характеризовать вероятностью
разрыва ракеты в элементарном объеме dxdydz около точки x,y,z, т.е. величиной
f(x,y,z)dxdydz.
Вероятность сложного события dR
dR=f(x,y,z)dxdydz G(x,y,z)
В соответствии с законом ошибок стрельбы разрыв боевой части ракеты может
произойти в любой точке пространства относительно цели. Следовательно, для
определения вероятности поражения одиночной цели одной ракетой необходимо
применить формулу полной вероятности, интегрируя по всему объему пространства в
пределах от минус бесконечности до плюс бесконечности:
R1 =
f ( x , y , z ) G ( x , y , z ) dxdydz
15.
Разрыв боевой части ракеты в точке с координатами x,y,z обеспечивается двумя
событиями:
• наведением ракеты в район цели с ошибками, не превышающих допустимые;
• своевременным разрывом боевой части в расчетной точке на данной траектории
•полета ракеты.
Ошибка
наведения
Возникновение ошибки при стрельбе ЗУР
1 – реальные (случайные) траектории; 2 – кинематическая (расчетная) траектория;
3 – расчетная точка разрыва БЧ; 4 – случайные точки разрыва БЧ.
Отклонение ракеты от траектории требуемого движения называется ошибкой наведения
и определяется координатами y,z, а отклонение точки разрыва от расчетной называется
ошибкой срабатывания радиовзрывателя и определяется координатой x для данных
значений ошибок наведения y,z
16.
Таким образом, закон ошибок стрельбы можно представить в следующем виде:
f(x,y,z) = f(y,z) f(x/y,z)
где
f(y,z) – закон ошибок наведения.
f(x/y,z) – закон срабатывания радиовзрывателя.
В свою очередь закон срабатывания радиовзрывателя f(x/y,z) можно представить в виде:
f(x/y, z) = f1 (х/у, z) Р рв(y, z)
где f1(х/y, z) условная плотность распределения координаты х точек срабатывания
радиовзрывателя при заданных ошибках наведения у, z;
Р рв (y, z) условная вероятность срабатывания радиовзрывателя.
Введем понятие условного координатного закона поражения цели, которое имеет вид:
G(y,z) =G(x,y,z) f1(x/y,z) dx
Функция G(y,z) характеризует вероятность поражения цели в зависимости от ошибок
наведения ракеты на цель при условии согласования радиовзрывателя с боевой частью,
которое обеспечивается в ЗРК применением специальных мер. Эти меры ведут к тому,
что реальный разброс координаты x точек подрыва боевой части вдоль траектории
незначителен. Поэтому вероятность поражения цели одной ракетой можно считать
независимой от координаты x точек разрыва боевой части вдоль траектории.
Учитывая это получим:
R1 = f ( y , z ) G ( y , z ) Pрв ( y , z ) dydz
Таким образом получаем алгоритм преобразования трехмерной функции вероятности
поражения одиночной цели одной ракетой, в двумерную функцию:
17.
Вероятность поражения
цели одной ракетой P(x,y,z)
Закон ошибок стрельбы
f(x,y,z)
Координатный закон
поражения цели G(x,y,z)
Закон срабатывания РВ
f(x /y,z)
Условная плотность
распределения координаты
х точек срабатывания f1(x /
y,z)
Закон ошибок наведения
f(y,z)
Условная вероятность
срабатывания РВ
PРВ (y,z)
Условный
координатный закон
поражение цели
G(y,z)
Вероятность поражение
цели одной ракетой P(y,z)
Алгоритм преобразования вероятности поражения цели одной ракетой
18.
Закон ошибок
стрельбы ЗУР
Закон ошибок
стрельбы
Закон
срабатывания
радиовзрывателя
19. 3. Закон ошибок наведения ЗУР
20.
На ракету во время ее полета воздействует большое число факторов. Под
воздействием этих факторов ракета отклоняется от расчетной траектории. Все факторы
действуют одновременно. Поэтому ошибку, характеризуемую их воздействием, называют
суммарной ошибкой наведения.
Суммарная ошибка
наведения
Систематическая
составляющая
m
Случайная
составляющая
σ
Систематической составляющей суммарной ошибки наведения называют такую
ошибку, которая в процессе наведения остается постоянной или изменяется по вполне
определенному закону.
Случайной составляющей суммарной ошибки наведения называют такую
ошибку, которая от измерения к измерению может принять любое неизвестное заранее
по величине и знаку значение.
21.
По источникам возникновения ошибки наведения делятся на:
Суммарная
ошибка
наведения
Динамическая
Флюктуационная
Инструментальная
Личная
Каждый из источников этих ошибок дает систематическую и случайную
составляющие. Исключение составляет флюктуационная ошибка, которая не имеет
систематической составляющей.
Ошибкой наведения ЗУР называется радиус-вектор, проведенный в проекцию точки
разрыва ракеты на картинную плоскость.
Суммарный закон ошибок наведения может выражаться формулой:
f ( y, z) =
1
2ps ys z
.e
2
( z mz ) 2
1 ( y my )
+
2 s y2
s z2
Такую форму закона принято называть суммарным законом ошибок наведения в
главных осях рассеивания.
В ряде случаев, когда σy σz = σ, для упрощения аналитических выражений
переходят к круговому закону.
f ( y, z) =
1
2ps
.e
2
( y m y ) 2 + ( z mz ) 2
2s 2
Такой вид закона принято называть круговым суммарным законом ошибок
наведения.
22.
Y
Y
sy
my
m
s
Р
Y
sz
r
Z
Z
Z
mz
Промахом r называется случайный вектор между целью и проекцией точки разрыва
ракеты (Р) на картинную плоскость. Он характеризуется величиной промаха r и его
ориентацией в картинной плоскости — углом , т.е. проекция точки разрыва в картинной
плоскости может быть определена полярными координатами r и .
От кругового суммарного закона ошибок наведения выраженного перейдем к закону
распределения промахов ракеты (r). Он может быть описан формулой:
f (r) =
r
s2
r2
e 2s
2
Это выражение называется законом Релея.
Для комплекса «Оса-АКМ» при стрельбе по прямолинейно летящей цели среднее
квадратическое отклонение находится в пределах 3-7 метров.
23.
При стрельбе наибольший интерес представляет вычисление вероятности
наведения ракеты в круг заданного радиуса.
Пусть радиус круга, вероятность наведения в который необходимо определить, равен
r0 (называется радиус надежного срабатывания радиовзрывателя). Тогда при
отсутствии систематической составляющей ошибки наведения (m = 0) вероятность
наведения ЗУР в круг радиуса r0 может быть определена по следующей формуле:
r02
2 s2
=
P( r r0 ) 1 e
При наличии систематической составляющей суммарной ошибки наведения
функция плотности распределения промахов будет зависеть и от аргумента m. И
выражение для вероятности наведения в круг заданного радиуса можно выразить
формулой:
rо
P( r r0 ) =
0
r
s2
e
r 2 + m2
2s 2 I
rm
0 2 dr
s
где r – текущее значение промаха;
m – систематическая составляющая ошибки наведения (математическое ожидание
ошибки наведения);
s – среднее квадратическое отклонение случайной составляющей суммарной
ошибки наведения при круговом рассеивании траекторий;
rm
I0 2 – функция Бесселя первого рода нулевого порядка от мнимого аргумента.
s
24.
Интеграл в этом выражения в конечном виде не берется и вычисляется методами
численного интегрирования. Поэтому вероятность наведения ЗУР в круг радиуса r0 при
наличии систематической ошибки наведения определяется на практике с помощью
таблиц или графиков функции
m2
r2
r0
2s 2
2s 2
r
F ( r0* ,m* ) = e
s2 e
0
где
r
m
r0* = 0 ; m * = .
s
s
rm
I 0 2 dr
s
25. 4. Закон срабатывания радиовзрывателя
26.
Под областью срабатывания радиовзрывателя понимается пространственная
область около ракеты, определяемая геометрическим местом условных центров цели в
момент срабатывания РВ.
Закон срабатывания радиовзрывателя f(x/y,z) можно представить в виде:
f(x/y, z) = f1 (х/у, z) Р рв(y, z),
где f1(х/y, z) условная плотность распределения координаты х точек срабатывания
радиовзрывателя при заданных ошибках наведения у, z;
Р рв (y, z) условная вероятность срабатывания радиовзрывателя.
Координаты любой точки пространства могут быть выражены в полярной системе
координат r, , . Поэтому:
f ( / r , q ) = f 1 ( / r , q ) P PB ( r , q ),
где угол срабатывания радиовзрывателя. Он образован продольной осью ракеты
и линией ракета цель в момент срабатывания радиовзрывателя;
r случайное значение промаха в плоскости У р О р Z р ;
q – угол, определяющий ориентацию промаха в плоскости Ур Ор Zр
относительно оси О р Z р.
Yp
r
Dрв
Θ
Θ
Xp
Zp
27.
Конструктивно радиовзрыватели выполнены так, что распределение
срабатывания не зависит от ориентации промаха, т. е. от угла q. Поэтому:
их
углов
f( /r) = f1( /r) Р рв(r)
где f1( /r) условная плотность распределения углов срабатывания радиовзрывателя;
Р рв(r) условная вероятность срабатывания радиовзрывателя или вероятность того, что
радиовзрыватель сработает, если ракета пройдет относительно цели с промахом r.
Таким образом, законом срабатывания радиовзрывателя называется произведение
условной плотности распределения углов срабатывания радиовзрывателя на условную
вероятность его срабатывания.
Рассмотрим условную плотность распределения углов срабатывания РВ.
( m )2
1
f1( / r ) =
exp
2
2 s
2p s
где: m — математическое ожидание углов срабатывания РВ при заданных значениях
промаха r (для РВ 9Э316 по цели типа МИГ-19 m =62о);
s — СКО углов срабатывания при заданных r. (для РВ 9Э316 s =1,5о – 8о).
Угол является случайной величиной, принимающий при каждом пуске определенное
значение под действием большого числа случайных и неслучайных факторов,
важнейшими из которых являются:
— угол наклона ДН приемной антенны;
— случайный характер сигналов, отраженных от цели, обусловленный флуктуацией
сигналов и разнообразием ЭПР различных целей (локация в ближней зоне);
— относительной скорости сближения ракеты с целью;
— случайный характер действия радиопомех на частоте РВ.
28.
Вид функции Р РВ(r) зависит от конструкции радиовзрывателя и от соотношения между
ошибками наведения и максимальными значениями дальности Д РВ max и радиуса r РВ max
срабатывания радиовзрывателя.
Между Д РВ max и r РВ max существует следующая зависимость:
rPB max(min) = DPB max sin(m 3s )
Знак «+» соответствует rРВ max , а знак «-» — rРВ min . Под rРВ max здесь понимают такое
максимальное значение промаха, начиная с которого возможно срабатывание
радиовзрывателя для данного фиксированного значения ДРВmax при заданных m и s
29.
Условная вероятность
срабатывания РВ
зависит от
Величина
промаха
Чувствительность
приемника РВ
факторов
Мощность
передатчика
РВ
ЭОП цели
Флюктуация
отраженного
от цели сигнала
30.
Вероятность срабатывания РВ характеризуется случайной величиной промаха r и
хорошо аппроксимируется зависимостью вида:
( r m r )2
PPB ( r ) = 1 Ф̂
где
s r2
— нормальная функция распределения
Ф̂
m и s — математическое ожидание и дисперсия радиуса срабатывания РВ.
r
r
Обычно для характеристики функции РРВ(r) используют математическое ожидание
радиуса срабатывания радиовзрывателя, равное значению промаха, при котором
РРВ(r) = 0,9. Обозначим его через r0 и будем называть радиусом надежного
срабатывания
радиовзрывателя.
Тогда
реальную
функцию
РРВ(r)
можно
аппроксимировать ступенчатой кривой вида:
1 при r ro
Pрв (r ) =
0 при r > r0 .
Радиолокационный взрыватель 9Э316М-1 ракеты 9М33М3 обеспечивает неконтактный
подрыв БЧ вблизи цели в момент, обеспечивающий наиболее эффективное поражение
цели.
ы в- огя а- 40 а а- в ~т, 1вэы ся ны а :ов ИОСКВЬ ВОЕННОЕ ИВДЛТЕЛЬСТВО $99! Ф.К.Неупокоев СТРЕЛЬБА ЗЕНИТНЫМИ РАКЕТАМИ ИЗДАНИЕ ТРЕТЬЕ, НСПРЛПЛЕППОЕ И ДОПОЛНЕННОЕ и г- гв ь- г- С ии о .й, ов о ~п- ББК 68.64 Н57 УДК 355.58 Редпктор В. Й. Голов Неупокоев Ф. К. Н57 Стрельба зенитными ракетами. — 3-е нзд,, перераб. и доп. — т Е: Воениздат, 1991. — 343 сл ил. 15В(ч 5 — 203 — 00265 — 7 В книге по материалам открытой отечественной и зарубежной печати изложены теоретические основы стрельбы зенитными управляемымн ракетами. В ней рассматринаюгсз методы наведения ракет на цель; дяи анализ факторов, определяющих ошибки навсдевия ракет иа цель н параметры координатного закона поражения цели; изложены методы расчета показателей эффективности стрельбы и оценки простраистнениых и временных возиожиостеа зенитного ракетного комплекса, а также обгцие поло>копая ио подготовке стрельбы и ведению огня.
Книга рассчитана на специалистов, занимающихся вопросами боевого применения зенитных ракетных комплексов, т’т)1зббообб — бтз н йй ‘.— 91 бй зб ББК бз.б4 15ВВ( 5 — 203 — 00265 — 7 © Воениздат, 1980 гс> Оформление, Воениздат, 1991 р изменениями р дополпелцямп ПРЕДИСЛОВИЕ П ервые два издания книги (Воениздат, 1970 г. и 1980 г.) имели большой спрос н получили полотки- тельную оценку читателей. В их письмах и отзывах особоот- мечалось раскрытие физического смысла и глубокий качест- венный анализ иа базе математического аппарата процессов стрельбы, практическая направленность изложения основ теории.
Вместе с этим высказывалнсь пожелания о включе- нии в издание книги общих положений по подготовке стрель- бы зенитными управляемыми ракетами (ЗУР) и ведению ог- ня по воздушным целям. Поэтому в настоящем, третьем издании книги сохранены структура и основное содержание первых семи разделоввто- рого издания.
Внесенные в ннх дополнения учитывают но- вые аспекты противоборства средств воздушного нападения и противовоздушной обороны, требующие совершенствова- ния теории стрельбы. Содержание раздела 8 изменено полностью и посвящено раскрытию общих положений подготовки стрельбы ЗУР, а также стрельбы на поражение целей, Исключенные из изда- ния материалы читатель прн необходимости может найти в книге автора «Противовоздушный бой» (Мл Воениздат„ 1989) . Таким образом, в настоящем издании в той плп иной ме- ре рассмотрены все вопросы теоретических основ стрельбы ЗУР, а последовательность их изложения представляется следующей.
Разделы 1 — 3 являются как бы подготовительными. С точки зрения рассматриваемых далее основных задач теории стрельбы ЗУР они дают читателю необходимые снсдения о координатах н параметрах движения воздушных целей, прннципах построения зенитных ракетных комплексов (ЗРК), способах управления и наведения ракет на цель, о динамике полета и характеристиках контура систем телеуп- равления и самонаведения ЗУР, Разделы 4 — 6 тесно связаны между собой и посвящены анализу н методам расчета вероятности поражения цели, а также математического ожидания числа сбитых самолетов как основным показателям эффективности стрельбы, определяющим выбор способов и правил ее подготовки и ведения огня. В них раскрыты сущность координатного закона поражения воздушной цели н ошибок наведения ЗУР; показано вчнянне различных факторов на значение их параметров; постанлена в общем виде задача оценки эффективности стрельбы ЗУР, в том числе прн противодействии противника, и приведено ее решение для частных случаев математического представления законов ошибок стрельбы и поражения цели.
В разделе 7 введено понятие зон поражения н пуска ЗРК, определены факторы, обусловливающие положение их границ, дан анализ временных составляющих цикла стрельбы и возможностей комплекса по переносу огня. Описание пространственных н временных характеристик комплекса завершается иллюстрацией методического подхода к оценке возможностей ЗРК по прикрытию объекта до рубежей выполпения задачи. Практическое использование рассмотренных в разделах 1 — 7 аспектов теории стрельбы показано при обосновании необходимого объема, содержания и порядка выполнения мероприятий предварительной и непосредственной подготовки стрельбы, а также ведение огня по целям зенитными подразделениями.
Последний раздел 8, являясь обобщающим, дает лишь основные направления для дальнейшей работы читателей в этой области с учетом особенностей каждой зенитной ракетной системы. Приведенные в книге примеры построены на условных данных и носят иллюстратинный характер. Автор выражает признательность всем лицам, которые высказали пожелания и рекомендации по изданию настоящего труда и этим оказали ему большую помощь. ВВЕЙЕВИЕ И процесс боевой работы зенитного ракетно~о подзразделения, направленный па поражение воздушной цели, принято называть стрельбой. Он начинается с момента получения задачи от вьппестоящсго командного пункта или самостоятельного принятия решения командиром подразделения иа уничтожение цели (целей) и включает непосредственную подготовку стрельбы, ведение огня (стрельбы) на поражение цели и оценку результатов стрельбы. После выполнения мероприятий (операций) непосредственной подготовки стрельбы зенитный ракетный комплекс перевод>пся и такой режим боевой работы по цели, прн котором после пуска зенитных управляемых ракет обеспечивается автоматическое их наведение на цель с требуемой точностью и при сближении с целью подрыв их боевой части.
Непосредственная подготовка заканчивается готовностьк> подразделения к пуску ЗУР. Содержание и порядок ее проведения в данных условиях стрельбы должны обеспечить сво. еврсменный обстрел пели с нанболыпей эффективностью при собл>одепии требований экономичности стрельбы, Ведение огня — процесс боевой работы, связанный с наведением ракет от момента пуска до подрыва их боевой части у цели. Задача боевого расчета иа этом этапе — пе допустить нарушения нормалыюго функционирования ЗРКпо цели, сделать контрмеры воздушного противника неэффективнымн. Оценка результатов стрельбы проводится по совокупности характерных признаков поражения (пепораження) цели.
Под поражением воздушной пслп понимается ее уничтожение или нанесение ей такого ущерба, при котором оиа не в состоянии выполнить поставленну>о боевую задачу, Огонь — основная составляющая противев<>зду>иного боя, который начинается с момента вскрып>я нападения воздушного противника на обороняемый объект (прикрываемые войска) и заканчивается его уничтожением или прекращением огня всеми зенитными подразделениями (из-за певозм»и>ности его даль>п йшего ведения).
Противовоздушный бой нсключпгельио скоротечен, динамичен, ретин>елен. Про. тивннк применяет в бою весь комплекс мер противодействия управлению огнем и стрельбе зенитными управляемыми ракетами, Разведка воздушного противника, радиоэлектронная борьба, являясь важнейшими видами обеспечения боевых действий, определяют специфику и самого содержания противовоздушного боя. Не обнаружив или несвоевременно обнаружив воздушного противника, не имея в реальном масштабе времени данных о его координатах и параметрах движения, нельзя вести по нему стрельбу. Ведение огня в условиях радиоэлектронного подавления со стороны противника, т. е. с выполнением всей совокупности мер радиоэлектронной защиты, стало наиболее характерным вариантом боевой работы зенитного подразделения. В ходе ведения противовоздушного боя органически сливаются действия, направленные на защиту обороняемого объекта (прикрытия войск) и обеспечение собственной живучести подразделений.
В частности, работа радиолокационных средств ЗРК с излучением в эфир позволяет противнику широко применять для их огневого подавления противорадиолокационные ракеты (ПРР). Общевойсковой характер борьбы с современными СВН противника вызвал необходимость непрерывного взаимодействия зенитных подразделений в ходе боя с истребителями ПВО и другими силами. Все это указывает на сложность процесса боевой работы зенитных подразделений, особенности подготовки стрельбы ЗУР и ведения огня по воздушному противнику, сочетание которых определяет тактические приемы выполнения боевой задачи в тех или иных условиях обстановки, главные отличительные черты противовоздушного боя и способ его ведения.
Исключительная скоротечность боя ограниченное время на оценку обстановки, принятие решения, постановку задач и нх выполнение обусловливают предельную напряженность действий командиров и боевых расчетов. Теория стрельбы изучает закономерности, сопровождающие подготовку стрельбы, ведение огня и действие боевой части у цели. Она обеспечивает выработку наиболее целесообразной с точки зрения надежности и экономичности организации стрельбы по целям в тех или иных условиях. Характерными задачами теории стрельбы являются: анализ завнснмости ошибок наведения ракеты на цельот условий и организации стрельбы и определение числовых характеристик их законов распределения; исследование действия ЗУР по цели и разработк м д определения координатного закона поражения цели; пки отка метовыбор показателей эффективности стрельбы н разработка методов нх оценки при заданных характеристиках закона ош бок наведения зенитных управляемых Ракет и коорди.
натного закона поражения цели; исследование досягаемости зенитного ракетного комплек- са (ЗРК) по дальности, высоте и курсовому параметру с уче- том эффективности стрельбы по цели (обоснование границ зоны поражения). определение возможностей комплекса по последователь- ному обстрелу целей и разработка методов такой стрельбы; обоснование норм расхода ракет; разработка и обоснование наивыгоднейших способов об- стрела целей в различных условиях обстановки; определение специфических требований к боевым поряд- кам подразделений, управлению огнем, а также подготовке боевых расчетов.
АННОТАЦИЯ
В данной работе представлен метод выбора параметров маневра противокорабельной ракеты (ПКР) при преодолении противодействия корабельных зенитно-ракетных комплексов (КЗРК) в горизонтальной плоскости. При выбранных параметрах маневра обеспечивается попадание ПКР в корабль-цель с требуемой вероятностью с учетом перехвата КЗРК.
ABSTRACT
This paper presents a method for choosing the parameters of an anti-ship missile (ASM) maneuver when overcoming the opposition of ship-based anti-aircraft missile systems (SAM) in the horizontal plane. With the selected maneuver parameters, the anti-ship missiles hit the target ship with the required probability, taking into account the interception of the anti-aircraft missile systems.
Ключевые слова: амплитуда маневра, частота маневра; маневр уклонения, вероятность попадания в корабль-цель.
Keywords: maneuver amplitude, maneuver frequency; evasive maneuver, the probability in the target ship.
1. Введение
Способность преодоления противодействия средств противовоздушной обороны (ПВО) противника на конечном этапе является определяющей при оценке боевой эффективности ПКР. По мере усовершенствования и модернизации корабельных систем ПВО тактика преодоления противодействия КЗРК при проектировании ПКР становится важным требованием для повышения живучести. В отличии от самолетов маневр уклонения КЗРК определяется как специальный маневр не только для повышения живучести ПКР от угроз КЗРК, но и для надежного перехвата корабля—цели.
Задача о маневре уклонения ПКР была рассмотрена в многих работах [1-10]. В работах [1-4] посвящено решение задачи об оптимизации маневра уклонения ПКР с целью преодоления противодействия систем оружий ближнего боя. Решая оптимизационную задачу численным методом, авторы показали, что оптимальная траектория либо горизонтальная «змейка», либо пространственная бочка, но сходящееся решение найти не удалось. На основе полученных результатов в работе [1] предложен трехмерный смещенный метод пропорционального сближения путем добавления ускорения смещения в командное ускорение традиционного метода пропорционального сближения для создания маневра по бочке. Здесь, ускорение смещения понимается как ускорение, вызывающее маневр по бочке, равное векторному произведению вектора скорости ракеты и вектора угловой скорости бочки. Здесь вектор угловой скорости бочки определяется заданной частотой бочки и осью бочки, которая совпадает с мгновенной линией визирования. В статьи [5] синтезирован закон наведения с контролем угла действия для синусоидального маневра уклонения путем введения синусоидального ускорения.
Частота маневра по бочке в работе [1], амплитуда и частота синусоидального ускорения в работе [5] могут рассматриваться как проектные параметры траектории, с помощью которых можно определить вид маневра. Численное моделирование в работах [1,5] показало, что как смещенный метод пропорционального сближения, так и закон наведения с контролем угла действия для синусоидального маневра могут повысить живучесть ПКР перед перехватом КЗРК. Однако в приведенных выше исследованиях не оценивалась вероятность увеличения проскальзывания корабля-цели при выполнении этих маневров, а также не давался метод выбора соответствующих проектных параметров траектории. В статьи [11] синтезирован закон наведения, так называемый синусоидальным смещенным законом пропорционального сближения для ПКР. Результаты расчета показали, что данный метод наведения создает не только волнообразные маневры в горизонтальной плоскости для преодоления противодействия КЗРК, но и повышение точность попадания в корабль-цель. В этой работе также оценивается влияние расчетных параметров проектирования траектории на живучесть ПКР перед перехватом КЗРК и способность поражать корабль-цель. Показано, что ПКР маневрирует с большей амплитудой, то ее живучесть перед перехватом КЗРК будет выше, но снижается вероятность попадания на корабль-цель. При произведении частоты маневра ПКР и постоянной времени КЗРК равном 0.7, то живучесть ПКР максимальна. Следовательно, необходим количественный метод выбора проектных параметров траектории (параметров маневра), обеспечивающий как живучесть ПКР, так и способность поражать корабль-цель.
2. Математическая постановка
2.1. Методы самонаведения
Рассматриваем относительное движение ПКР на самонаводящемся участке сближения c кораблем-целью с учетом уклонения от перехвата корабельной зенитной управляемой ракетой (ЗУР) в горизонтальной плоскости /Dung.files/image002.png) , как показано на Рис. 1.
, как показано на Рис. 1.
ПКР движется с постоянной скоростью /Dung.files/image003.png) в направление не движущегося корабля-целя и уклоняется от перехвата ЗУР, скорость которой
в направление не движущегося корабля-целя и уклоняется от перехвата ЗУР, скорость которой /Dung.files/image004.png) постоянна. Командное ускорение а каждой ракеты перпендикулярно к вектору их скорости. Положение ПКР, ЗУР и корабля-целя обозначается соответственно
постоянна. Командное ускорение а каждой ракеты перпендикулярно к вектору их скорости. Положение ПКР, ЗУР и корабля-целя обозначается соответственно /Dung.files/image005.png) ,
, /Dung.files/image006.png) и
и /Dung.files/image007.png) . Их взаимоотношение определяется относительным расстоянием
. Их взаимоотношение определяется относительным расстоянием /Dung.files/image008.png) и углом визирования
и углом визирования/Dung.files/image009.png) .
.
Предполагается, что ПКР приближается к корабля-цели по синусоидальному смещенному закону пропорционального сближения для уклонения ЗУР. В то же время, ЗУР перехватывает ПКР по традиционному закону пропорционального сближения.
/Dung.files/image010.png)
Рисунок 1. Относительное движение ПКР—ЦЕЛЬ—ЗУР
Предполагается, что ПКР приближается к корабля-цели по синусоидальному смещенному закону пропорционального сближения для уклонения ЗУР. В то же время, ЗУР перехватывает ПКР по традиционному закону пропорционального сближения.
Командное ускорение ПКР по синусоидальному смещенному закону пропорционального сближения определяется по формуле [11]:
/Dung.files/image011.png)
где: /Dung.files/image012.png) и
и /Dung.files/image013.png) — амплитуда и частота маневра ПКР;
— амплитуда и частота маневра ПКР; /Dung.files/image014.png) — остаточное время полета до момента встречи с целью, определяемое по формуле
— остаточное время полета до момента встречи с целью, определяемое по формуле /Dung.files/image015.png) здесь
здесь /Dung.files/image016.png) ,
, /Dung.files/image017.png) — время самонаведения и текущее время.
— время самонаведения и текущее время.
По формуле (1) заметим, что командное ускорение ПКР содержит две составляющих частей. Первая часть представляет собой командное ускорение по традиционному закону пропорционального сближения для обеспечения встречи с целью. И вторая часть является функцией синусоидального и косинусного ускорений (так называемой синусоидальной составляющей смещения) для создания волнообразного маневра.
Также согласно работе [11], выражение в закрытой форме для ускорения ПКР определяется следующим образом:
/Dung.files/image018.png) (2)
(2)
где: /Dung.files/image019.png) — начальная ошибка наведения (рад.)
— начальная ошибка наведения (рад.)
Данное ускорение будет использоваться в качестве входного сигнала контура самонаведения ЗУР для оценки влияния параметров проектирования траектории ПКР на промах ЗУР. С другой стороны, ЗУР движется по традиционному закону пропорционального сближения при перехвате ПКР. Согласно работе [12] командное ускорение ЗУР имеет следующий вид:
/Dung.files/image020.png) (3)
(3)
где: /Dung.files/image021.png) — константа наведения;
— константа наведения; /Dung.files/image022.png) — относительная скорость ЗУР и ПКР.
— относительная скорость ЗУР и ПКР.
2.2. Контуры самонаведения ПКР и ЗУР
Используя типичный биномиальный контур самонаведения пятого порядка [12] с использованием закона самонаведения (1), получен контур самонаведения для ПКР с использованием синусоидального смещенного закона пропорционального сближения, как показано на Рис. 2. Входной сигнал контура /Dung.files/image023.png) так как корабль-цель считается неподвижным. Относительное расстояние
так как корабль-цель считается неподвижным. Относительное расстояние /Dung.files/image024.png) в конечное время считается приблизительно равным промахом ПКР
в конечное время считается приблизительно равным промахом ПКР /Dung.files/image025.png) [13].
[13].
Из данного контура видно, что существует три основных источника ошибок, вызывающих промах ПКР при сближении с кораблем-целью, в том числе: начальная ошибка наведения ПКР ; синусоидальные и косинусные части ускорения закона самонаведения, характеризующиеся амплитудой и частотой маневра (/Dung.files/image026.png) ); кинематика контура самонаведения ПКР, характеризующаяся постоянным времени
); кинематика контура самонаведения ПКР, характеризующаяся постоянным времени /Dung.files/image027.png) .
.
Аналогично, на Рис. 3 представлен контур самонаведения ЗУР с использованием традиционного закона пропорционального сближения, построенного из формулы (3). На входе контура — ускорение ПКР в замкнутой форме (2).
/Dung.files/image028.png)
Рисунок 2. Контур самонаведения ПКР
/Dung.files/image029.png)
Рисунок 3. Контур самонаведения ЗУР
Таким образом, по контуру наведения на Рис. 3 показывает, что существует три основных источника ошибок, вызывающих промах ЗУР при перехвате ПКР: начальная ошибка наведения ЗУР (/Dung.files/image030.png) ); маневры ПКР, характеризующиеся параметрами амплитуды и частоты маневра (
); маневры ПКР, характеризующиеся параметрами амплитуды и частоты маневра (/Dung.files/image031.png) ); кинематика контура самонаведения ПКР, характеризующаяся постоянным времени
); кинематика контура самонаведения ПКР, характеризующаяся постоянным времени /Dung.files/image032.png) и константой наведения N’.
и константой наведения N’.
3. Метод выбора параметров маневра пкр
Для оценки живучести ПРК от перехвата ЗУР используем величину вероятности преодоления противодействия зенитного огня ПКР, обозначаемую через/Dung.files/image033.png) Возможность попадания ПКР в корабль-цель оценивается через вероятность точного самонаведения по кораблю- цель при отсутствии перехвата ЗУР, называемая вероятностью поражения корабля-целя и обозначаемая
Возможность попадания ПКР в корабль-цель оценивается через вероятность точного самонаведения по кораблю- цель при отсутствии перехвата ЗУР, называемая вероятностью поражения корабля-целя и обозначаемая /Dung.files/image034.png) . В связи с этим, критерием выбора расчетного параметра проектирования траектории является произведение вероятности преодоления противодействия зенитного огня ПКР и вероятности самонаведения ПКР. Тогда, вероятность поражения корабля-целя ПКР при контратаке ЗУР, именуемая вероятностью поражения корабля-цели ПКР, определяется по формуле:
. В связи с этим, критерием выбора расчетного параметра проектирования траектории является произведение вероятности преодоления противодействия зенитного огня ПКР и вероятности самонаведения ПКР. Тогда, вероятность поражения корабля-целя ПКР при контратаке ЗУР, именуемая вероятностью поражения корабля-цели ПКР, определяется по формуле:
/Dung.files/image035.png) (4)
(4)
Вероятность преодоления противодействия зенитного огня ПКР определяется следующим образом [14]:
/Dung.files/image036.png) (5)
(5)
где: /Dung.files/image037.png) – количество ПКР в залпе, выпущенном по кораблю-цели;
– количество ПКР в залпе, выпущенном по кораблю-цели;
/Dung.files/image038.png) – количество стрельб, проводимых ЗРК на корабль-цель;
– количество стрельб, проводимых ЗРК на корабль-цель;
/Dung.files/image039.png) – коэффициент, учитывающий снижение теоретически возможного числа стрельб до фактического реализуемого (в данном случае
– коэффициент, учитывающий снижение теоретически возможного числа стрельб до фактического реализуемого (в данном случае /Dung.files/image040.png) );
);
/Dung.files/image041.png) – коэффициент, учитывающий долю стрельб ЗРК, распределяемых равномерно. Выбираем
– коэффициент, учитывающий долю стрельб ЗРК, распределяемых равномерно. Выбираем /Dung.files/image042.png) , потому, что ПКР летит близко к поверхности моря;
, потому, что ПКР летит близко к поверхности моря;
/Dung.files/image043.png) – вероятность поражения ПКР за одну стрельбу, когда ПКР неподвижен. Т.е. ПКР движет по традиционному закону пропорционального сближения;
– вероятность поражения ПКР за одну стрельбу, когда ПКР неподвижен. Т.е. ПКР движет по традиционному закону пропорционального сближения;
/Dung.files/image044.png) – коэффициент, учитывающий снижение вероятности
– коэффициент, учитывающий снижение вероятности /Dung.files/image045.png) при маневрировании ПКР по синусоидальному смещенному закону пропорционального сближения.
при маневрировании ПКР по синусоидальному смещенному закону пропорционального сближения.
С другой стороны, согласно [15] имеем выражение:
/Dung.files/image046.png) (6)
(6)
где: /Dung.files/image047.png) – ошибка наведения и средний квадрат случайной ошибки;
– ошибка наведения и средний квадрат случайной ошибки;
/Dung.files/image048.png) — параметр боевой части ЗУР.
— параметр боевой части ЗУР.
Вероятность поражения корабля-цели при использовании зоны поражения в виде прямоугольника определяется по формуле [16]:
/Dung.files/image049.png) (7)
(7)
где: /Dung.files/image050.png) – удаление точки прицеливания от центра объекта по направлениям
– удаление точки прицеливания от центра объекта по направлениям /Dung.files/image051.png) ;
;
/Dung.files/image052.png) – размеры приведенной зоны поражения по направлениям ;
– размеры приведенной зоны поражения по направлениям ;
/Dung.files/image053.png) – срединные ошибки пуска ракеты по направлениям ;
– срединные ошибки пуска ракеты по направлениям ;
/Dung.files/image054.png) – функция Лапласа, имеющая следующий вид:
– функция Лапласа, имеющая следующий вид:
/Dung.files/image055.png) (8)
(8)
Поскольку мы рассматриваем маневры ПКР при сближении к кораблю-цели в горизонтальной плоскости при низкой высоте, близкой к поверхности моря, поэтому мы рассматриваем только составляющую ошибки наведения и среднеквадратичную случайную ошибку по оси /Dung.files/image056.png) плоскости поражения. Т.е.
плоскости поражения. Т.е. /Dung.files/image057.png) ,
, /Dung.files/image058.png) и коэффициент
и коэффициент/Dung.files/image059.png) . Тогда, получим:
. Тогда, получим:
/Dung.files/image060.png) (9)
(9)
Ошибка наведения и средний квадрат случайной ошибки определяются путем моделирования контуров управления на Рис. 2 и Рис. 3.
На основании моделирования выше указанных контуров наведения, результатов определения вероятности преодоления противодействия зенитного огня ПКР и вероятности поражения корабля-цели можно сформулировать метод выбора проектных параметров траектории ПКР в двух этапах расчета.
Первый этап расчета заключается в определении базы данных для дальнейшего выбора проектных параметров траектории ПКР:
Шаг 1: Задание параметров ЗУР и выбор диапазона параметров ПКР.
Шаг 2: Определение нормального ускорения ПКР и моделирование контуров самонаведения ЗУР и ПКР (Рис. 2 и Рис. 3). Затем, рассчитываются ошибка наведения и средний квадрат случайной ошибки ЗУР и ПКР.
Шаг 3: Определение вероятности преодоления противодействия зенитного огня по формуле (5) и вероятности поражения корабля-цели ПКР по формуле (7).
Шаг 4: Построение отношения между вероятностью преодоления противодействия зенитного огня ПКР и вероятностью поражения корабля-цели ПКР.
Во втором этапе расчета выбираются проектные параметры траектории ПКР для обеспечения требований задач проектирования, таких как: параметры ЗУР на корабле, длина корабля, вероятность поражения корабля-цели. Выбор параметров траектории ПКР производится с учетом базы данных, полученных из первого этапа.
4. Результаты моделирования и расчета
Проведем расчет выбора проектных параметров траектории ПКР для обеспечения поражения корабля-цели с заданной вероятностью при заданных параметрах тактико-технических характеристик (ТТХ) КЗРК. Расчет был проведен для следующих параметров тактико-технических характеристик ЗУР:
Таблица 1.
Заданные параметры тактико-технические характеристики ЗУР
|
ТТХ КЗРК |
Обозначение |
Ед. |
Значение |
|
Постоянная времени |
|
с |
0.1, 0.2, 0.3, 0.4, 0.5 |
|
Средняя скорость полета |
|
м/с |
600 |
|
Располагаемое нормальное ускорение |
|
g |
20 |
|
Время самонаведения |
|
с |
[3, 20] |
|
Начальная ошибка наведения |
|
град. |
[-20, 20] |
|
Константа наведения |
|
3, 4, 5 |
|
|
Параметр боевой части ЗУР |
|
[1,10] |
|
|
Количество ЗУР в залпе |
|
ЗУР/залп |
1, 2, 3 |
/Dung.files/image061.png)
/Dung.files/image062.png)
/Dung.files/image063.png)
/Dung.files/image064.png)
/Dung.files/image065.png)
/Dung.files/image066.png)
/Dung.files/image067.png)
/Dung.files/image068.png)
На основании приведенной выше таблицы известных значений параметров ЗУР можем определить диапазон значений проектных параметров траектории и технико-тактических параметров ПКР, которые необходимы для проведения моделирования контура самонаведения ЗУР:
Таблица 2.
Диапазон параметров тактико-технических характеристик
|
ТТХ ПКР |
Обозначение |
Ед. |
Значение |
|
Амплитуда маневра |
|
g |
[1, 10] |
|
Частота маневра |
|
|
|
|
Постоянная времени |
|
с |
0.1, 0.2, 0.3, 0.4, 0.5 |
|
Средняя скорость полета |
|
м/с |
200, 300, 400, 500, 600 |
|
Располагаемое нормальное ускорение |
|
g |
|
|
Максимальное время самонаведения |
|
c |
80, 60, 50, 44, 40 |
|
Минимальное время самонаведения |
|
c |
3 |
|
Начальная ошибка наведения |
|
град. |
[-20, 20] |
|
Количество ПКР в залпе |
|
ПКР/залп |
1 |
/Dung.files/image069.png)
/Dung.files/image070.png)
/Dung.files/image071.png) рад./с
рад./с/Dung.files/image072.png) , 1.11, 0.74, 0.56, 0.45
, 1.11, 0.74, 0.56, 0.45/Dung.files/image073.png)
/Dung.files/image074.png)
/Dung.files/image075.png)
/Dung.files/image076.png)
/Dung.files/image077.png)
/Dung.files/image078.png)
/Dung.files/image079.png)
/Dung.files/image080.png)
После проведения моделирования и расчета по двум упомянутым выше этапам построим зависимость вероятности поражения корабля-цели ПКР с учетом перехвата ЗУР от проектных параметров траектории ПКР (/Dung.files/image081.png) ) и других параметров, как показано на Рис. 4.
) и других параметров, как показано на Рис. 4.
Рисунок 4. Зависимость вероятности поражения корабля—цели ПКР от: а) k и /Dung.files/image086.png) ; б) k и
; б) k и /Dung.files/image087.png) ; в) k и R0; u) k и L (параметр корабля-цели)
; в) k и R0; u) k и L (параметр корабля-цели)
Из Рис. 4 видно, что чем меньше постоянная времени ЗУР, тем меньше вероятность поражения корабля-цели ПКР и наоборот. Для каждого значения постоянной времени ЗУР вероятность поражения корабля-цели ПКР достигает своего максимального значения при различных амплитудах и частотах маневра, как показано в таблице 3.
По результатам таблицы 3 заметим, что при достаточно малой постоянной времени ЗУР /Dung.files/image088.png) вероятность поражения корабля-цели ПКР приблизительно равна нулю независимо от амплитуды и частоты маневра. По мере увеличения постоянной времени ЗУР, то значения амплитуды и частоты маневра, при которых вероятность поражения корабля-цели ТЛПК максимальна, будут уменьшаться, а также постепенно увеличивается соответствующее максимальное значение вероятности поражения корабля-цели. Аналогично, мы тоже заметим изменение максимального значения вероятности поражения корабля-цели по изменению постоянной времени ПКР, параметра боевой части ЗУР и параметра корабля-цели, как показано на Рис. 4.
вероятность поражения корабля-цели ПКР приблизительно равна нулю независимо от амплитуды и частоты маневра. По мере увеличения постоянной времени ЗУР, то значения амплитуды и частоты маневра, при которых вероятность поражения корабля-цели ТЛПК максимальна, будут уменьшаться, а также постепенно увеличивается соответствующее максимальное значение вероятности поражения корабля-цели. Аналогично, мы тоже заметим изменение максимального значения вероятности поражения корабля-цели по изменению постоянной времени ПКР, параметра боевой части ЗУР и параметра корабля-цели, как показано на Рис. 4.
Таблица 3.
Максимальная вероятность поражения корабля—цели ПКР при различных постоянных времени ЗУР
|
|
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
|
|
0 |
0.6 |
0.6 |
1 |
1 |
|
|
|
|
|
3 |
3 |
|
|
|
|
|
|
|
/Dung.files/image089.png) (с)
(с)/Dung.files/image090.png)
/Dung.files/image091.png)
/Dung.files/image092.png)
/Dung.files/image093.png)
/Dung.files/image094.png)
/Dung.files/image095.png)
/Dung.files/image096.png)
/Dung.files/image097.png)
/Dung.files/image098.png)
Таким образом, после первого этапа расчета определены базы данных для дальнейшего выбора проектных параметров траектории ПКР. В дальнейшем проведем расчет для выбора проектных параметров траектории ПКР с входными данными, включая: параметр ТТХ ЗУР, параметр корабля-цели, как показано в таблице 4, и считаем, что вероятность поражения корабля-цели ПКР /Dung.files/image099.png) . Результаты расчета показаны в таблице 5.
. Результаты расчета показаны в таблице 5.
Таблица 4.
Входные данные для выбора проектных параметров траектории ПКР
|
Параметры |
Обозначение |
Ед. |
Значение |
|
Постоянная времени |
|
с |
0.2 |
|
Параметр боевой части ЗУР |
|
3 |
|
|
Количество ЗУР в залпе |
|
ЗУР |
2 |
|
Средняя скорость полета |
|
м/с |
600 |
|
Нормальное ускорение |
|
с |
20 |
|
Время полета |
|
с |
20 |
|
Параметр корабля-цели (длина) |
|
м |
5 |
/Dung.files/image100.png)
/Dung.files/image101.png)
/Dung.files/image102.png)
/Dung.files/image103.png)
/Dung.files/image104.png)
Таблица 5.
Таблица базы данных для выбора параметров маневра ПКР
|
№ |
Эффективность ПКР |
Параметры ПКР |
||||||||
|
|
|
|
[g] |
[ |
[с] |
[м/с] |
[g] |
[ПКР] |
[с] |
|
|
1 |
1 |
1 |
1 |
10 |
1.11 |
0.1 |
400 |
15 |
1 |
50 |
|
2 |
1 |
1 |
0.98 |
10 |
1.11 |
0.1 |
500 |
15 |
1 |
44 |
|
3 |
1 |
1 |
1 |
10 |
1.11 |
0.1 |
600 |
15 |
1 |
40 |
|
4 |
0.9 |
1 |
0.93 |
10 |
1.11 |
0.1 |
300 |
15 |
1 |
60 |
|
5 |
0.9 |
1 |
0.93 |
9 |
1.11 |
0.1 |
400 |
13.5 |
1 |
50 |
|
6 |
0.9 |
1 |
0.93 |
9 |
1.11 |
0.1 |
600 |
13.5 |
1 |
40 |
|
7 |
0.9 |
0.94 |
0.93 |
9 |
1.11 |
0.2 |
400 |
13.5 |
1 |
50 |
|
8 |
0.9 |
0.88 |
1 |
10 |
1.11 |
0.2 |
400 |
15 |
1 |
50 |
|
9 |
0.9 |
0.88 |
0.98 |
10 |
1.11 |
0.2 |
500 |
15 |
1 |
44 |
|
10 |
0.9 |
0.94 |
0.93 |
9 |
1.11 |
0.2 |
600 |
13.5 |
1 |
40 |
|
11 |
0.9 |
0.88 |
1 |
10 |
1.11 |
0.2 |
600 |
15 |
1 |
40 |
|
12 |
0.8 |
0.88 |
0.93 |
10 |
1.11 |
0.2 |
300 |
15 |
1 |
60 |
|
13 |
0.7 |
1 |
0.67 |
10 |
1.11 |
0.1 |
200 |
15 |
1 |
80 |
|
14 |
0.7 |
1 |
0.7 |
8 |
1.11 |
0.1 |
600 |
12 |
1 |
40 |
|
15 |
0.7 |
0.98 |
0.7 |
8 |
1.11 |
0.2 |
600 |
12 |
1 |
40 |
|
16 |
0.6 |
0.88 |
0.67 |
10 |
1.11 |
0.2 |
200 |
15 |
1 |
80 |
|
17 |
0.6 |
0.66 |
0.93 |
9 |
1.11 |
0.3 |
400 |
13.5 |
1 |
50 |
|
18 |
0.6 |
0.56 |
1 |
10 |
1.11 |
0.3 |
400 |
15 |
1 |
50 |
|
19 |
0.6 |
0.57 |
0.98 |
10 |
1.11 |
0.3 |
500 |
15 |
1 |
44 |
|
20 |
0.6 |
0.66 |
0.93 |
9 |
1.11 |
0.3 |
600 |
13.5 |
1 |
40 |
|
21 |
0.6 |
0.56 |
1 |
10 |
1.11 |
0.3 |
600 |
15 |
1 |
40 |
|
22 |
0.5 |
1 |
0.49 |
9 |
1.11 |
0.1 |
500 |
13.5 |
1 |
44 |
|
23 |
0.5 |
1 |
0.45 |
7 |
1.11 |
0.1 |
600 |
10.5 |
1 |
40 |
|
24 |
0.5 |
0.94 |
0.49 |
9 |
1.11 |
0.2 |
500 |
13.5 |
1 |
44 |
|
25 |
0.5 |
1 |
0.45 |
7 |
1.11 |
0.2 |
600 |
10.5 |
1 |
40 |
|
26 |
0.5 |
0.56 |
0.93 |
10 |
1.11 |
0.3 |
300 |
15 |
1 |
60 |
|
27 |
0.5 |
0.77 |
0.7 |
8 |
1.11 |
0.3 |
600 |
12 |
1 |
40 |
|
28 |
0.5 |
0.51 |
0.93 |
9 |
1.11 |
0.4 |
400 |
13.5 |
1 |
50 |
|
29 |
0.5 |
0.51 |
0.93 |
9 |
1.11 |
0.4 |
600 |
13.5 |
1 |
40 |
|
30 |
0.5 |
0.49 |
0.93 |
9 |
1.11 |
0.5 |
600 |
13.5 |
1 |
40 |
/Dung.files/image105.png)
/Dung.files/image106.png)
/Dung.files/image107.png)
/Dung.files/image108.png)
/Dung.files/image109.png)
/Dung.files/image110.png) рад./с]
рад./с]/Dung.files/image111.png)
/Dung.files/image112.png)
/Dung.files/image113.png)
/Dung.files/image114.png)
/Dung.files/image115.png)
По результатам, приведенным в таблице 5 можно сделать следующие выводы:
Для достижения максимальной эффективности ПКР (вероятность поражения корабля-цели равна 1), то амплитуда маневра должна быть максимальной в диапазоне исследуемых значений (/Dung.files/image116.png) ), частота маневра должна
), частота маневра должна /Dung.files/image117.png) (рад/с), быстродействие системы управления должна быть быстрой (
(рад/с), быстродействие системы управления должна быть быстрой (/Dung.files/image118.png) ), скорость полета ракеты должна быть выбрана в большом диапазоне (
), скорость полета ракеты должна быть выбрана в большом диапазоне (/Dung.files/image119.png) м/с). С точки зрения проектирования ракеты видно, что чем меньше амплитуда и частота маневра, тем лучше, поскольку это позволяет упростить аэродинамическую и конструктивную схему ракеты и снизить энергию управления. Выбор скорости полета связан с конструкцией двигательной установки и должен быть производится с учетом времени нахождения ПКР в зоне пуска комплекса КЗРК.
м/с). С точки зрения проектирования ракеты видно, что чем меньше амплитуда и частота маневра, тем лучше, поскольку это позволяет упростить аэродинамическую и конструктивную схему ракеты и снизить энергию управления. Выбор скорости полета связан с конструкцией двигательной установки и должен быть производится с учетом времени нахождения ПКР в зоне пуска комплекса КЗРК.
При снижении требований к эффективности ПКР следует, что снижаются и требования к некоторым параметрам ПКР. Амплитуда маневра уменьшается до 7g, быстродействие системы управления достигает всего 0,5с при вероятности поражения равной 0,5.
5. Заключение
В статье построен метод выбора проектных параметров траектории ПКР в виде явного и простого процесса расчета при выполнении вычислительного моделирования на цифровой ЭВМ. Результаты предложенного метода правильно отразили физическую природу события и могут быть использоваться для количественной оценки при выборе проектных параметров траектории ПКР через приведенные графики и таблицы. В качестве критерия выбора параметра маневра ПКР используется вероятность поражения корабля-цели. Данная задача рассматривается в более широком масштабе, включая все возможные случаи. Особенно было рассмотрено взаимое отношение между проектными параметрами траектории ПКР и другими характерными параметрами трех связанных объектов, а именно ПКР, ЗУР и корабля-цели. Это взаимое отношение является основным фактором, влияющим на вероятность поражения корабля-цели ПКР. Предложенный метод выбора проектных параметров траектории ПКР по критерию вероятности поражения корабля-цели будет способствовать конструкторам в выборе параметров траектории, а также других тактико-технических параметров при исследованиях по улучшению или разработке новых ПКР.
Список литературы:
- Yoon-Hwan Kim, Chang-Kyung Ryoo and Min-Jea Tahk. Guidance synthesis for evasive maneuver of anti-ship missiles against close-in weapon systems // IEEE Transactions on Aerospace and Electronic Systems. 2010. 46(3). P. 1376-1388.
- Chang-Kyung Ryoo, Hyo-Sang Shin and M Tahk. Optimal waypoint guidance synthesis // Proceedings of 2005 IEEE Conference on Control Applications. 2005. P. 1349-1354.
- Chang-Kyung Ryoo, Ick Whang and Min-Jea Tahk. 3-D evasive maneuver policy for anti-ship missiles against close-in weapon systems // AIAA Guidance, Navigation, and Control Conference and Exhibit. 2003. P. 5653.
- Ick-Ho Whang. Optimal Evasive Maneuver for Sea Skimming Missiles against Close-In Weapon System // Proceedings of the KIEE Conference, The Korean Institute of Electrical Engineers. 2002. P. 2096-2098.
- Jin-Ik Lee, Chang-Kyung Ryoo. Impact angle control law with sinusoidal evasive maneuver for survivability enhancement // International Journal of Aeronautical Space Sciences. 2018. 19(2). P. 433-442.
- Yoon-Hwan Kim, Chang-Kyung Ryoo, Min-Jea Tahk. 3-D biased PNG for evasive maneuver of anti-ship missiles against CIWS // IFAC Proceedings Volumes. 2004. 37(6). P. 659-664.
- Yoon-Hwan Kim and Min-Jea Tahk. Guidance synthesis for evasive maneuver of anti-ship missiles // AIAA Guidance, Navigation and Control Conference and Exhibit. P. 67-83.
- Yoon-Hwan Kim, Min-Jea Tahk. Biased PNG with maximal-g barrel-roll for survivability enhancement of anti-ship missiles// International Conference on Control, Automation and Systems. 2008. P. 473-476.
- Chang-Hun Lee, Jin-Ik Lee, Min-Jea Tahk. Sinusoidal function weighted optimal guidance laws // Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering. 2015. 229(3). P. 534-542.
- Jin-Ik Lee, Chang-Kyung Ryoo, Keeyoung Choi. A guidance law with sinusoidal evasive maneuver for enhancing survivability of anti-ship missiles // IFAC Proceedings Volumes. 40(7), P. 804-809.
- Bui Quoc Dung, Cao Huu Tinh, Nguyen Cong Thuc. The influence of trajectory design parameters on miss distance and survivability of anti-ship missiles // 21st International Conference on Control, Automation and Systems (ICCAS). 2021. P. 1496-1501.
- U.S. Shukla, Pravas M. The proportional navigation dilemma-pure or true? // IEEE Transactions on Aerospace Mahapatra and Electronic Systems. 1990. 26(2). 382-392.
- Paul Zarchan. Tactical and strategic missile guidance // American Institute of Aeronautics and Astronautics, Inc. 1990. 1026 P.
- Хомяков М.А., Мельников В.Ю. и др. Расчет эффективности преодоления противодействия корабельных зенитно-ракетных комплексов: Методика расчета. 43 с.
- Голубев И.С., Светлов В.Г. Проектирование зенитных управляемых ракет. – М.: МАИ, 2001. 732 c.
- Фендриков Н. М. and Яковлев В. И. Методы расчетов боевой эффективности вооружения. – М.: Воениздат. 221 с.
Зенитное управляемое ракетное оружие. Пересада С. А.|
1. ОБЩЕЕ ПОНЯТИЕ О ЗЕНИТНОМ УПРАВЛЯЕМОМ РАКЕТНОМ ОРУЖИИ
Схемы построения и стрельбы зенитного ракетного комплекса
Зенитное управляемое ракетное оружие служит для поражения воздушных целей противника. Наименьшей единицей зенитного управляемого ракетного оружия считается зенитный ракетный комплекс (ЗРК).
Зенитным ракетным комплексом называется совокупность зенитной управляемой ракеты (ЗУР) с системами и устройствами, обеспечивающими обнаружение, опознавание и выбор для поражения воздушной цели, а также пуск и наведение ЗУР на эту цель.
Обнаружение, опознавание и выбор для поражения воздушной цели производит система обнаружения и целеуказания.
Определение момента пуска и наведение ЗУР на выбранную цель обеспечивает система управления ЗУР.
Выбранная цель поражается боевой частью зенитной управляемой ракеты.
ЗУР запускается с пусковой установки.
Схема современного ЗРК приведена на рис. 1, где условно показаны системы и устройства, непосредственно участвующие в его работе. Это боевые элементы комплекса.
В состав ЗРК иногда включается вспомогательное и контрольно-измерительное оборудование, обеспечивающее различные поверочные и ремонтные работы, сборку ЗУР, транспортировку ракет, заряжание пусковых установок и т. п.
7
Несмотря на многообразие современных ЗРК, схема их стрельбы принципиально одинакова.
Процесс стрельбы ЗРК по воздушной цели в общем виде можно разделить на следующие взаимосвязанные последовательные этапы, обеспечиваемые боевыми эле-
Зенитный ракетный комплекс (ЗРК)

Рис. 1. Схема построения зенитного ракетного комплекса
ментами ЗРК (рис. 2): обнаружение, опознавание и выбор для поражения цели (данные о цели являются исходными для работы всех остальных боевых элементов ЗРК), определение момента пуска и своевременный пуск ЗУР, наведение ЗУР на выбранную цель и ее поражение.
Система обнаружения и целеуказания начинает работать при входе цели в зону ее действия (точка Ц), после чего опознается цель (свой или чужой самолет),

Рис. 2. Схема стрельбы зенитного ракетного комплекса:
Я — высота; Д — дальность; О —точка расположения ЗРК; Ц — начало работы системы обнаружения и целеуказания; 3 — начало работы системы управления ЗУР; П — пуск ЗУР; В — точка встречи ЗУР с целью
8
определяются параметры ее движения (направление, высота, скорость и дальность полета).
Цель выбирается или оператором, который для этого имеет экран с отображением необходимых параметров полета цели, или автоматически. Критерием является степень угрозы прикрываемому комплексом объекту.
Целеуказание и необходимые данные о выбранной цели передаются системе управления ЗУР.
На осуществление перечисленных операций расходуется некоторое время, в течение которого цель пролетит расстояние ЦЗ (рис. 2).
Определение момента пуска и своевременный пуск ЗУР обеспечивают средства управления стартом ЗУР. Эти средства начинают работу при нахождении цели в точке 3.
За время их работы цель пролетит расстояние ЗП.
Время от момента начала обнаружения цели до пуска ЗУР называется работным временем ЗРК, которое у современных комплексов составляет несколько десятков секунд.
Возможность пуска ЗУР при нахождении цели в точке П определяется из следующего условия: время полета цели на пути ПВ должно быть равно времени полета ЗУР на пути ОВ, при этом условии встреча ЗУР с целью произойдет в точке В, называемой точкой встречи.
Наведение ракеты на выбранную цель осуществляется в ЗРК системой наведения ЗУР. Наведение ЗУР производится так, чтобы ракета непосредственно встретилась с целью или пролетела вблизи нее на определенном расстоянии.
После пуска ракета некоторое время летит без управления. Участок траектории такого полета называется неуправляемым или стартовым участком. В современных ЗРК его длина доходит до нескольких сот метров (иногда нескольких километров). После неуправляемого полета начинается участок управляемого полета ЗУР, в начале которого система наведения постепенно выводит ракету на требуемую траекторию.
Время полета ЗУР на стартовом и управляемом участках траектории (до момента встречи с целью) называется полетным временем ЗУР. Обычно поражение цели боевой частью происходит без непосредственного контакта с ней ракеты, т. е. при некотором промахе.
9
Основные характеристики зенитного ракетного комплекса
Среди многочисленных характеристик ЗРК наиболее важными считаются эффективность, зона поражения и надежность.
Критериями эффективности ЗРК являются условная вероятность поражения цели боевой частью ЗУР, вероятность поражения одиночной цели за стрельбу ЗРК одной ЗУР, средний расход ракет на поражение одной цели и т. п.
Поскольку эффективность ЗРК зависит от параметров обстреливаемой цели, то при ее расчетах задаются диапазоном дальностей, скоростей и высот полета цели, ее уязвимостью, эффективной отражающей поверхностью и видом маневра.
Основным критерием оценки эффективности ЗРК считается условная вероятность поражения цели боевой частью ЗУР, т. е. вероятность поражения цели при условии нормальной работы всех боевых элементов ЗРК в ходе стрельбы.
Иногда при оценке эффективности ЗРК ограничиваются только этим критерием, который в современных ЗРК составляет несколько десятков процентов.
Боевая часть может поражать цель при прямом попадании и при подрыве на некотором расстоянии от цели.
В силу наличия ошибок наведения большинство современных ЗУР не рассчитано на прямое попадание в цель. В этом случае условная вероятность поражения цели боевой частью зависит от величины промаха, уязвимости цели, могущества боевой части и согласования области срабатывания неконтактного взрывательного устройства с областью поражения цели боевой частью.
Величина промаха (минимальное расстояние между боевой частью ракеты в момент подрыва и целью) определяется систематическими и случайными ошибками при наведении ракеты на цель.
В систематических ошибках наведения основную долю составляют ошибки, обусловленные точностью работы системы наведения ЗУР. Систематические ошибки при стрельбе одного ЗРК практически остаются постоянными или изменяются по вполне определенному закону. Поэтому для конкретного ЗРК при стрельбе по опре-
10
деленной цели они могут быть заранее определены,- а их вредное влияние на промах максимально уменьшено.
Случайные ошибки при стрельбе ЗРК могут принимать различные заранее неизвестные значения и тем самым неожиданно влиять на промах. Случайные ошибки в основном связаны со случайными отклонениями условий полета ЗУР и цели от условий, принятых при проектировании (случайное изменение ветра, температуры
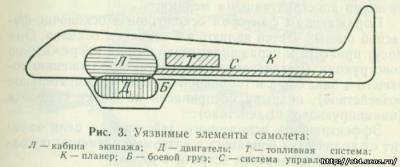
Рис. 3. Уязвимые элементы самолета: Л — кабина экипажа; Д — двигатель; Т — топливная система: К — планер; Б — боевой груз; С — система управления
и др.). Случайные ошибки также возникают в связи со случайными (но в пределах допусков) изменениями в аппаратуре системы наведения, происходящими в процессе наведения ЗУР на цель.
Величина максимально допустимого промаха непосредственно зависит и определяется уязвимостью цели и могуществом боевой части ЗУР (законом поражения цели).
Уязвимость цели характеризуется уязвимостью ее элементов. Такими уязвимыми элементами, например, у самолета являются (рис. 3) кабина экипажа, двигатель, топливная система, планер, система управления и боевой груз.
Каждый из уязвимых элементов цели характеризуется устойчивостью против воздействия на него того или иного поражающего фактора боевой части. Устойчивость определяется при создании боевой части на базе многочисленных, как правило, наземных экспериментов.
В связи с тем что устойчивость уязвимых элементов каждой цели проверить экспериментально невозможно, для расчетов закона их поражения исследуемой боевой частью прибегают к сравнению с результатами уже про-
11
веденных экспериментов. Для этого, однако, нужно зйать такие характеристики уязвимых элементов рассматриваемой цели, как их размеры, расположение, прочность.
Могущество боевой части характеризуется ее поражающими факторами.
Подавляющее большинство ЗУР снабжается боевыми частями осколочного или осколочно-фугасного действия. Боевые части имеют осколки примерно одинаковой формы и размеров (веса), что обеспечивается различными конструктивными мерами.
Поражающим фактором осколочной и осколочно-фугасной боевых частей являются в основном осколки. Они могут привести к поражению экипажа или повреждению конструкции (механическое воздействие) , зажжению горючего в баках или в топливной системе (зажигательное воздействие), подрыву боеприпасов на борту самолета (инициирующее воздействие).
Эффективность осколочного действия по цели зависит от количества попавших в уязвимые элементы осколков, их веса и скорости встречи с целью.
Для поражения уязвимого элемента цели зачастую требуется несколько осколков. Обеспечить попадание нескольких осколков в уязвимый элемент цели можно, создав поле осколков. Такое поле, состоящее из осколков, способных нанести повреждение цели, называется областью поражения цели осколочным действием. Для экономии веса боевой части (а значит, и веса самой ЗУР) области поражения цели осколочным действием создают не шарообразными, а в виде полого конуса (рис. 4).
Осколки из-за сопротивления воздуха теряют в полете скорость, в связи с чем область поражения цели осколочным действием меньше области разлета осколков.
Подрыв боевой части стараются осуществить при таком расположении ЗУР и цели в момент встречи, когда цели может быть нанесен максимальный ущерб. Своевременный подрыв боевой части обеспечивает неконтактное взрывательное устройство.
Для более надежного поражения цели в некоторых случаях запускают несколько ЗУР по одной цели.
Зоной поражения ЗРК называется часть пространства, внутри которого обеспечивается поражение типичной воздушной цели с вероятностью не ниже заданной.
12
Типичная воздушная Цель устанавливается до разработки ЗРК после всестороннего анализа средств воздушного нападения противника (обязательно с учетом перспектив их развития и тактики применения), которые будут действовать по объектам, прикрываемым будущим ЗРК.
область срабатывания неконтактного взрывательного устройства
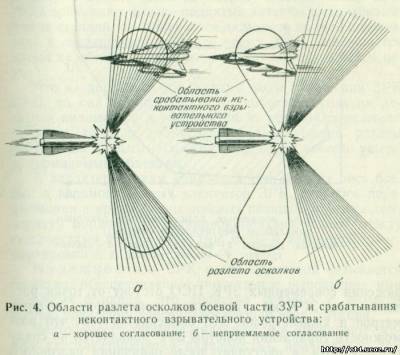
Рис. 4. Области разлета осколков боевой части ЗУР и срабатывания неконтактного взрывательного устройства: а — хорошее согласование; б — неприемлемое согласование
Установление типичной цели (целей) позволяет определить боевые характеристики создаваемого ЗРК, охватывающие его зону поражения. К ним относятся эффективность поражения цели (устанавливается из условия необходимой степени прикрытия обороняемых объектов с учетом тактики применения создаваемого ЗРК), максимальные и минимальные дальности и высоты поражения цели и др.
На рис. 5 показано вертикальное сечение зоны поражения и границы, его определяющие.
Ближняя граница зоны поражения ЗРК выбирается обычно с таким расчетом, чтобы она отстояла на минимально возможном расстоянии от точки стояния ком-
13
плекса (точка О). В этом случае глубина зоны поражения увеличиваемся, что позволяет более длительное время вести обстрел цели (например, несколькими последовательно запускаемыми ЗУР), а также улучшает возможность обстрела пролетающей цели в слмчае позднего ее обнаружения. Однако ближняя граница зоны по-

Рис. 5. Зона поражения цели зенитным ракетным комплексом (вертикальное сечение): 1 — ближняя граница; 2 — верхняя граница; 3 — дальняя граница; 4 — нижняя граница
ражения современных ЗРК ПСО отстоит от точки расположения ЗРК на расстоянии, измеряемом сотнями метров и километрами. Это объясняется тем, что возможность управления полетом ЗУР появляется не сразу после старта, а наступает после окончания разгонного (стартового) неуправляемого участка ее полета и, кроме того, после участка выбора ошибок, накопившихся за время неуправляемого полета.
Дальняя граница зоны поражения определяется в основном максимальными наклонными дальностями полета ЗУР и дальностями действия систем обнаружения и управления. При разработке новых ЗУР эту границу стремятся отнести как можно дальше от точки стояния ЗРК.
Верхняя граница зоны поражения современных ЗРК находится на высоте от нескольких километров до нескольких десятков километров. Она в основном обеспечивается энергетическими и конструктивными возможно-
14
стями ЗУР, а также возможностями средств обнаружения и управления.
Нижняя граница зоны поражения современных ЗРК ПСО находится на высоте от нескольких десятков метров до нескольких километров.
Поэтому за рубежом для обеспечения борьбы с низколетящими целями (десятки метров) в современных ЗРК ПСО применяют высоко поднятые антенны радиолокационных станций (увеличивается дальность прямой видимости) и сокращенное работное время ЗРК (уменьшается время на обработку данных о внезапно появившихся целях).
Что касается нижней границы зоны поражения ЗРК ПРО, то она располагается на высоте нескольких десятков километров и выбирается из условия поражения ядерным зарядом атакующей баллистической ракеты противника до высоты, с которой не будет нанесен ущерб прикрываемым объектам.
К характеристикам комплекса еще относят веса боевых и вспомогательных элементов ЗРК, скорости передвижения и время смены огневых позиций, пределы температур нормального функционирования, связь между комплексами и их элементами, виды и дальность транспортировки и т. д.
Надежностью ЗРК и его элементов называется свойство, обеспечивающее нормальное выполнение ими заданных функций. Это свойство связано с возможностью появления неисправностей при эксплуатации.
Часто вместо термина «надежность» применяют термин «эксплуатационная надежность», подчеркивая тем самым, что надежность проявляется при эксплуатации. Под эксплуатацией здесь понимается хранение, транспортировка, проверка, подготовка к боевому использованию и боевое использование.
В простейшем случае, когда в ЗРК и его элементах отсутствуют дублирующие цепи и выход из строя любого элемента делает ЗРК неработоспособным, надежность комплекса в целом характеризуется вероятностью его нормального функционирования, которая определяется как произведение вероятностей безотказного (нормального) функционирования элементов, входящих в ЗРК.
Аналогично рассчитывается и надежность каждого элемента ЗРК.
15
То обстоятельство, что надежность какого-либо сложного устройства (будь то ЗРК или один из его боевых элементов) определяется произведением надёжностей составляющих его устройств, предъявляет высокие требования к надежности этих устройств.
Повышение надежности ЗРК и его элементов является одним из важнейших путей повышения эффективности ЗРК. Повышение надежности достигается сокращением количества устройств, а также дублированием цепей в элементах.
Классификация зенитных ракетных комплексов
Зенитные ракетные комплексы могут быть классифицированы по различным признакам. Один из возможных вариантов классификации, ориентирующий на известные состоящие на вооружении и разрабатываемые иностранные ЗРК, приведен на рис. 6. По этой класси-
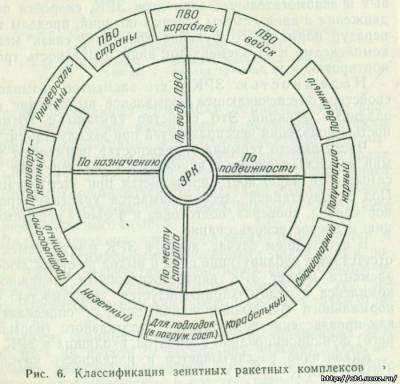
Рис. 6. Классификация зенитных ракетных комплексов
16
фикацки ЗРК подразделяют по виду ПВО, подвижности, месту старта и назначению.
По виду ПВО зенитные ракетные комплексы подразделяются на ЗРК ПВО страны, ПВО кораблей и ПВО войск.
Разработка ЗРК ПВО страны началась за рубежом раньше других комплексов. Первыми появились комплексы ПСО, так как авиация в то время считалась основным средством воздушного нападения. Отличительными особенностями ЗРК этой подгруппы являются относительная их сложность и, как правило, стационарность. Эти ЗРК обычно обслуживаются разветвленной системой обнаружения, не входящей в их состав, предназначенной для значительных районов или территории страны (стран), на которых размещаются, прикрывая отдельные объекты или площади, подразделения ЗРК.
ЗРК ПВО кораблей начали разрабатываться несколько позже, чем ЗРК ПВО страны. Они отличаются стационарностью, боевым элементам отводятся специальные места на корабле. Пусковые установки снабжаются, как правило, устройствами, обеспечивающими механизированную или автоматическую подачу к ним ЗУР.
ЗРК ПВО войск появились значительно позже, чем рассмотренные ЗРК. Это объясняется тем, что основным требованием, предъявляемым к этим комплексам, является их высокая подвижность. На начальном же этапе разработок боевые элементы ЗРК были громоздкими и тяжелыми. Первым этапом в создании ЗРК ПВО войск была модернизация (придание подвижности) уже разработанных ЗРК ПВО страны. Позже начали разрабатывать специальные комплексы ПВО войск. Отличительными особенностями этих ЗРК являются быстрый переход из походного положения в боевое и обратно, измеряемый несколькими минутами (некоторые ЗРК производят пуски ракет в движении), возможность действовать в бою автономно (вплоть до совмещения на одном самоходном шасси всех боевых элементов ЗРК), пониженная до нескольких десятков метров нижняя граница зоны поражения, сравнительная дешевизна, простота устройства, боевого использования и эксплуатации.
По подвижности ЗРК разделяются на стационарные, полустационарные и подвижные.
17
Стационарные ЗРК отличаются тем, что их установка на боевой позиции требует длительных подготовительных работ. Эти ЗРК обычно имеют сложное и громоздкое оборудование, зачастую — подземные помещения для хранения ЗУР, их сборки и проверок. В некоторых образцах в подземных укрытиях размещаются и пусковые установки. Транспортируются боевые элементы этих ЗРК для их установки на наземных боевых позициях обычно в разобранном виде. Перебазировка их в ходе боевых действий не предусматривается.
Полустационарные ЗРК обычно представляют собой комплексы ПВО страны, модернизированные для ПВО войск. Предусматривается перебазировка этих ЗРК в ходе боевых действий. Перевозка боевых элементов комплексов занимает время, измеряемое часами, и зачастую требует частичной их разборки. Вновь занимаемые боевые позиции, как правило, нуждаются в специальной инженерной подготовке.
Подвижные ЗРК предназначены в основном для ПВО войск. Они могут в течение нескольких минут занять боевую позицию и сняться с нее, сопровождать войска при их перемещениях, что обеспечивается размещением боевых элементов комплексов на специальных колесных или гусеничных шасси. Многие из этих ЗРК авиатранспортабельны.
По назначению ЗРК разделяются на противоса-молетные, противоракетные и универсальные.
Противосамолетные ЗРК предназначаются в основном для поражения самолетов (вертолетов). Они могут также успешно применяться против крылатых ракет, имеющих летные и конструктивные характеристики, близкие или равные аналогичным характеристикам самолетов. ч
Противоракетные ЗРК (или комплексы ПРО) предназначаются для поражения на траектории баллистических ракет (головных частей) различных типов, в том числе и крылатых ракет, отличающихся своими характеристиками от самолетов.
За рубежом эти комплексы еще не вышли из стадии разработок и испытаний. Их отличительные особенности— сложность и чрезвычайная дороговизна, большие дальности и высоты полета ЗУР (антиракет), измеряе-
18
мые десятками и сотнями километров, применение ядерных боевых частей, большие дальности действия систем обнаружения и наведения (до нескольких тысяч километров), работа по целеуказанию от специальных систем обнаружения, не входящих в состав комплекса, высокая автоматизация боевой работы.
Универсальные ЗРК также не вышли за рубежом из стадии разработок. Эти ЗРК планируются для поражения самолетов и ракет тактического и оперативно-тактического назначения при одних и тех же боевых элементах комплекса. Универсальные ЗРК отличаются от ЗРК ПСО тем, что имеют более мощные средства обнаружения, обеспечивающие обнаружение целей значительно меньших габаритов, более скоростных и более высоколетящих, чем самолеты. Универсальные ЗРК создаются за рубежом путем модернизации ЗРК ПСО (заменой средств обнаружения более мощными) и разработки новых комплексов. Качества универсализма, как правило, придаются и ЗРК ПВО войск. Универсализм можно рассматривать и с точки зрения обеспечения комплексам ПВО возможности вести стрельбу по наземным и морским целям.
Введение. Постановка задачи
Пропорциональная навигация как закон управления полетом является основой для построения современных систем самонаведения ЗУР. Методы пропорциональной навигации, реализующие этот закон в виде управляющих ускорений, обладают рядом свойств, выгодно отличающих их от других методов наведения. Одним из таких свойств является то, что на заключительном участке полета ЗУР, за несколько единиц – десятков секунд до ее встречи с целью, если цель не маневрирует, а ракета выведена на участок самонаведения на цель без существенных угловых ошибок, то наведение осуществляется фактически по методу параллельного сближения. В свою очередь, достоинством метода параллельного сближения является обеспечение наведения ракеты на неманеврирующую цель без поперечных перегрузок. Последнее позволяет сэкономить энергию («располагаемые перегрузки») ракеты для отработки внезапного маневра цели на конечном участке наведения и в итоге минимизировать промах.
Данное свойство пропорциональной навигации особенно актуально при перехвате баллистических целей – для них характерен регулярный (кеплеровский) характер движения вне атмосферы и интенсивное торможение с большими перегрузками (воспринимаемыми системой управления ракеты как маневр) при входе в атмосферу и движении в ней. Кроме того, современные баллистические цели (боевые блоки и головные части баллистических ракет) создаются способными при движении в атмосфере совершать интенсивные маневры и в поперечном направлении за счет использования аэродинамических органов управления. Ранее такими маневрирующими целями были головные части баллистических ракет Pershing II (производство США, ракета снята с вооружения в 1991 г.), а в настоящее время в различных странах мира активно создаются современные виды гиперзвукового оружия, выводимого к цели с использованием баллистических и аэробаллистических траекторий и способного активно маневрировать в стратосфере.
Сам метод параллельного сближения не получил распространения в системах самонаведения ввиду сложности технической реализации, а также недостатков при работе по маневрирующим целям и в условиях переменной скорости ракеты (что характерно для современных твердотопливных ЗУР, имеющих, как правило, короткий разгонный участок и участок пассивного полета, на котором скорость ракеты интенсивно снижается под действием сил сопротивления воздуха и гравитации), в то время как методы пропорциональной навигации в этих условиях имеют хорошие свойства, которые, собственно, и исследуются в настоящей статье.
Другими ценными свойствами пропорциональной навигации как закона управления являются возможность адаптации траектории ракеты к условиям полета за счет изменения всего одного параметра – коэффициента пропорциональности, а также достаточно простая техническая реализация на борту ЗУР.
Основы теории пропорциональной навигации были впервые сформулированы в США в 1943 году (первая известная монография вышла в 1945 г. [1]). Практически одновременно и независимо сходные результаты были получены немецкими учеными при разработке ракетных систем в 1944–1945 годах. В нашей стране эта теория получила развитие и практическое применение в послевоенные годы – уже в начале 1960-х годов на основе пропорциональной навигации были созданы первые системы самонаводящегося зенитного управляемого ракетного оружия С-200 [2–5] и «Куб».
Однако, несмотря на большую историю развития, из-за преимущественно военного применения, прежде всего в системах ракетного вооружения, теория пропорциональной навигации (в трехмерном представлении и в различных возможных вариантах реализации) широкого освещения не получала и стала достоянием общественности только в последние десятилетия.
Сущность и свойства некоторых методов пропорциональной навигации в настоящее время детально описаны и исследованы в специальной литературе. Наиболее значимыми являются работы зарубежных авторов: классические, многократно переизданные труды П. Зарчана (США) [6][7], монография Н. А. Шнейдора (Израиль) [8], статьи Ю. С. Шукла и П. Р. Махапатра (Индия) [9][10]. Среди отечественных публикаций выделяются монографии Е. И. Кринецкого [11], В. Я. Мизрохи [12], фундаментальная монография под ред. И. С. Голубева и В. Г. Светлова [13], лекции А. В. Беляева [14], а также более ранние статьи А. С. Кельзона и В. Л. Кана [15–17], в которых описаны базовые принципы пропорциональной навигации.
В настоящее время в доступной литературе описаны четыре метода пропорциональной навигации. Наиболее известны методы, именуемые в ряде зарубежных работ PPN (Pure Proportional navigation – «чистая пропорциональная навигация») и TPN (True Proportional navigation – «истинная пропорциональная навигация»). Данные названия методов (как и другие) условны и не отражают их сущности и свойств, а используются лишь для различения методов. Известен также метод, получивший в [8] название IPN (Ideal Proportional navigation – «идеальная пропорциональная навигация»). Именно этот метод в большинстве отечественных работ последних десятилетий описывается как метод пропорциональной навигации и рассматривается безальтернативно, как основа современных систем самонаведения ракет (см., например, [12–14]).
Кроме названных методов в англоязычной Википедии [18] при описании пропорциональной навигации приведено соотношение для управляющего ускорения, формируемого по методу (без специального наименования для него), который в настоящей статье для удобства, в силу его свойств, сочетающих свойства методов PPN и IPN, рассматриваемых ниже, обозначен как PPN-I. При этом отсылка Википедии по поводу этого метода к монографии Р. Янушевского [19] несостоятельна – в монографии описан метод IPN.
Все четыре перечисленные метода (PPN, TPN, IPN, PPN-I) отличаются как свойствами, определяющими способность перехвата цели управляемой ракетой, так и возможностями по их технической (аппаратной) реализации.
Несмотря на детальное описание отдельных методов пропорциональной навигации в специальной литературе, вопрос их сравнения и выбора остается открытым. В качестве работ, где выполнено обстоятельное сравнение, но только двух методов – PPN и TPN, можно назвать монографию [8] и статью [9]. Некоторые самые общие сравнительные сведения по методам PPN, TPN и PPN-I приведены в Википедии [18]. Анализ названных методов в перечисленных работах носит формально-математический характер и не позволяет однозначно отдать предпочтение какому-либо методу (за исключением [9], где из пары PPN и TPN более предпочтительным признан метод PPN). В работах П. Зарчана, прежде всего в статье [7], выполнен глубокий, практически-ориентированный анализ, но только одного метода – IPN. Сравнительный анализ всех четырех перечисленных методов (PPN, TPN, IPN, PPN-I) в единой работе отсутствует.
В настоящей работе проводится сравнительная оценка кинематики1 ракеты при использовании четырех названных методов (кинематический анализ) с учетом возможности их технической реализации. При этом учитываются неточность исходных данных в начале этапа самонаведения (ошибки вывода ракеты на самонаведение) и особенности движения цели. Учет влияния помех и инерционности элементов системы самонаведения вынесены за рамки рассмотрения в интересах анализа исключительно кинематических свойств методов.
Постановка задачи. Необходимо выполнить сравнительный кинематический анализ четырех приведенных в различных зарубежных и отечественных источниках методов пропорциональной навигации (PPN, TPN, IPN, PPN-I) при самонаведении ЗУР на маневрирующую баллистическую цель (типа головная часть тактической баллистической ракеты) в верхних слоях стратосферы. Исходными данными для оценки методов являются известные параметры траектории цели (модель цели), высотный диапазон перехвата цели, дальность начала самонаведения ЗУР (определяется потенциалом головки самонаведения (ГСН)), а также ошибки в исходных данных на начальном этапе самонаведения ракеты на цель, обусловленные погрешностями вывода ракеты в точку начала работы ГСН и самонаведения.
Для выполнения сравнительного анализа методов необходимо выбрать и обосновать показатели качества наведения, разработать модель управляемого движения ЗУР, и, далее, оценить значения и характер изменения показателей качества наведения для разных методов в зависимости от траекторных параметров рассматриваемой цели.
Сравнительный анализ необходимо выполнить с учетом возможностей технической реализации методов.
1. Кинематика ракеты и исследуемые методы пропорциональной навигации
Предварительно, с целью задания математического базиса для анализа, опишем кинематику неуправляемой ракеты при абсолютном и относительном (относительно цели) движении в инерциальной системе координат (ИСК).
Прямоугольная ИСК Oxyz задается следующим образом: ее центр совпадает с точкой расположения радиолокатора, осуществляющего выведение ЗУР в точку начала работы ГСН для последующего самонаведения на цель, ось Ox направлена по линии горизонта координат до правой тройки.
ЗУР и цель рассматриваются как материальные точки. При этом с целью анализа только кинематики ЗУР, обусловленной управлением, не рассматриваются силы, определяющие движение ЗУР: тяга двигателей, гравитация и аэродинамические силы. Для цели, движущейся на заключительном участке Кеплеровой траектории, учитываются действие гравитации и лобовое сопротивление воздуха.
Траектория ЗУР в ИСК в каждый момент времени определяется радиус-вектором  и вектором скорости
и вектором скорости  :
:

где хр, yр, zр – координаты ЗУР в ИСК.
Вектор скорости  направлен по касательной к траектории в текущей точке.
направлен по касательной к траектории в текущей точке.
Текущая дальность до ракеты и ее скорость определяются как модули соответствующих векторов:

Вектор ускорения ракеты определяется как производная по времени от вектора скорости:

Вектор  рассматривается как сумма тангенциальной и нормальной составляющих:
рассматривается как сумма тангенциальной и нормальной составляющих:

Нормальная составляющая вектора ускорения  является управляющей и задается метом наведения. Влияние вектора , создаваемого по различным методам наведения, на траекторию ракеты оценивается в настоящей работе. При этом учитывается техническая возможность формирования управляющего ускорения.
является управляющей и задается метом наведения. Влияние вектора , создаваемого по различным методам наведения, на траекторию ракеты оценивается в настоящей работе. При этом учитывается техническая возможность формирования управляющего ускорения.
Общее уравнение для вектора нормального ускорения  имеет вид:
имеет вид:
 (1)
(1)
где  – вектор угловой скорости вращения вектора
– вектор угловой скорости вращения вектора  ;
;
× – знак векторного произведения.
Вектор  в текущей точке траектории определяется следующим образом [20]: он лежит в плоскости, перпендикулярной вектору
в текущей точке траектории определяется следующим образом [20]: он лежит в плоскости, перпендикулярной вектору  , его модуль
, его модуль  равен угловой скорости вращения вектора , а направление таково, что совместно с вектором и единичным вектором нормали, направленной по радиусу кривизны траектории, он образует правую тройку.
равен угловой скорости вращения вектора , а направление таково, что совместно с вектором и единичным вектором нормали, направленной по радиусу кривизны траектории, он образует правую тройку.
Изменение вектора  обеспечивает изменение направления полета ЗУР. Для этого применяются аэродинамические или газодинамические способы создания управляющих моментов и сил в поперечном к продольной оси ракеты направлении. Скорость ЗУР Vр (составляющая формулы (1)) не используется для управления направлением полета – понадобилось бы при наведении на маневрирующую цель как ускорять ракету, так и замедлять ее движение, что неприемлемо.
обеспечивает изменение направления полета ЗУР. Для этого применяются аэродинамические или газодинамические способы создания управляющих моментов и сил в поперечном к продольной оси ракеты направлении. Скорость ЗУР Vр (составляющая формулы (1)) не используется для управления направлением полета – понадобилось бы при наведении на маневрирующую цель как ускорять ракету, так и замедлять ее движение, что неприемлемо.
Опишем кинематику движения ракеты относительно цели. При этом траекторию цели считаем известной. Она характеризуется радиус-вектором цели  и вектором скорости цели
и вектором скорости цели  .
.
Введем векторы относительной дальности  и относительной скорости
и относительной скорости 
цели (относительно ракеты) как разности соответствующих векторов цели и ракеты:

Их абсолютные величины равны, соответственно,
 .
.
Для удобства описания и отображения введем вектор скорости сближения ракеты с целью

Вектор угловой скорости вращения вектора относительной дальности  (линии визирования ракета – цель) рассчитывается, как показано в [8], с использованием векторного произведения векторов и
(линии визирования ракета – цель) рассчитывается, как показано в [8], с использованием векторного произведения векторов и  по формуле
по формуле
 .
.
Вектор  перпендикулярен двум векторам –
перпендикулярен двум векторам –  и , его направление определяется по правилу правой руки. Поясняющая схема приведена на рисунке 1. Вектор на практике измеряется ГСН ЗУР [21][22].
и , его направление определяется по правилу правой руки. Поясняющая схема приведена на рисунке 1. Вектор на практике измеряется ГСН ЗУР [21][22].

Рис. 1. Определение вектора угловой скорости вращения линии визирования ракета – цель. Красным цветом показана траектория ЗУР, синим – траектория цели. Точки Р и Ц – текущее положение ЗУР и цели соответственно
Описание кинематики управляемой ракеты включает приведенные выше уравнения для описания относительного движения неуправляемой ракеты и уравнение для управляющего ускорения, формируемого в соответствии с одним из анализируемых методов пропорциональной навигации.
Идея пропорциональной навигации как закона наведения заключается в управлении полетом ракеты таким образом, чтобы вектор скорости ракеты  поворачивался с угловой скоростью, пропорциональной угловой скорости вращения линии визирования ракета – цель и в том же направлении:
поворачивался с угловой скоростью, пропорциональной угловой скорости вращения линии визирования ракета – цель и в том же направлении:
 (2)
(2)
где  – требуемый вектор угловой скорости вращения вектора скорости ракеты;
– требуемый вектор угловой скорости вращения вектора скорости ракеты;
Км – коэффициент пропорциональности (коэффициент метода, навигационная постоянная),
Км > 1, на практике Км = 2,5 – 8.
Для управления полетом ракеты по закону пропорциональной навигации (2) необходимо создавать соответствующее управляющее (нормальное) ускорение. Общая формула для расчета требуемого управляющего ускорения ракеты, формируемого по закону пропорциональной навигации, имеет вид
 (3)
(3)
где  – векторная величина, имеющая физический смысл скорости.
– векторная величина, имеющая физический смысл скорости.
На основе рассчитанного по формуле (3) управляющего ускорения вырабатываются команды управления полетом ракеты, реализуемые газодинамическими или аэродинамическими органами управления.
Формула (3) в зависимости от способа определения вектора (его направления и величины) задает семейство методов пропорциональной навигации.
Дадим описание отдельных известных методов пропорциональной навигации.
Метод PPN. Для этого метода
=  , требуемое управляющее ускорение равно
, требуемое управляющее ускорение равно
 (4)
(4)
Формируемое управляющее ускорение соответствует нормальному ускорению ЗУР (1) – оно ортогонально вектору скорости ЗУР. Взаимосвязь векторов, используемых для формирования управляющего ускорения по методу PPN, показана на рисунке 2.

Рис. 2. Взаимосвязи векторов для метода PPN
На рисунке 2а (общий вид) изображено: вектор  (направлен вглубь рисунка) перпендикулярен векторам
(направлен вглубь рисунка) перпендикулярен векторам  и , обеспечивая, в соответствии с (4), поворот вектора и связанного с ним вектора
и , обеспечивая, в соответствии с (4), поворот вектора и связанного с ним вектора  в сторону вектора
в сторону вектора  (линии визирования ракета – цель). В итоге при совпадении направлений векторов и , реализуется метод параллельного сближения.
(линии визирования ракета – цель). В итоге при совпадении направлений векторов и , реализуется метод параллельного сближения.
На рисунке 2б для упрощения восприятия показан вид векторов со стороны конца вектора  (обозначен точкой в кружке). Принято, что векторы скорости ,
(обозначен точкой в кружке). Принято, что векторы скорости ,
и вектор лежат в одной плоскости (в общем случае это не так) – в плоскости рисунка. Для показанного случая расположения векторов , и вектор угловой скорости направлен перпендикулярно плоскости рисунка в сторону наблюдателя, круговой стрелкой показано направление вращения вектора (и связанного с ним вектора ) относительно вектора .
На практике вектор , используемый в методе, может быть измерен бортовой инерциальной системой наведения (ИНС) ракеты.
Метод TPN. Для этого метода  , где
, где  – единичный вектор относительной дальности цели. Требуемое управляющее ускорение равно
– единичный вектор относительной дальности цели. Требуемое управляющее ускорение равно

и формируется ортогонально линии визирования ракета – цель (рис. 3). Требуемое управляющее ускорение метода ТPN в общем случае не ортогонально вектору скорости ЗУР.

Рис. 3. Взаимосвязи векторов для метода ТPN
На практике единичный вектор  (направление на цель) измеряется следящей угловой системой ГСН.
(направление на цель) измеряется следящей угловой системой ГСН.
Метод IPN. Для этого метода  . Требуемое управляющее ускорение равно
. Требуемое управляющее ускорение равно

и формируется ортогонально вектору скорости сближения ракеты с целью (рис. 4). Требуемое управляющее ускорение в общем случае не ортогонально вектору скорости ЗУР.

Рис. 4. Взаимосвязи векторов для метода IPN
Не имеется технических способов измерения вектора  . На практике на борту ЗУР он может быть рассчитан по данным ИНС о векторе скорости ракеты и результатам траекторной обработки измерений, выполняемых доплеровской ГСН. В оптической ГСН техническая реализация измерения относительной скорости цели затруднена (необходимо использовать активный лазерный канал).
. На практике на борту ЗУР он может быть рассчитан по данным ИНС о векторе скорости ракеты и результатам траекторной обработки измерений, выполняемых доплеровской ГСН. В оптической ГСН техническая реализация измерения относительной скорости цели затруднена (необходимо использовать активный лазерный канал).
Метод PPN-I. Для этого метода  =
= , где
, где  – единичный вектор скорости ракеты. Требуемое управляющее ускорение равно
– единичный вектор скорости ракеты. Требуемое управляющее ускорение равно

Оно направлено ортогонально вектору скорости ракеты, как в методе PPN (рис. 2), но, в отличие от этого метода, пропорционально величине относительной скорости цели Vсбл, как в методе IPN. Техническая реализация метода, как и метода IPN, в общем случае требует траекторных расчетов по данным доплеровской радиолокационной ГСН. В частном случае в качестве оценки параметра Vсбл может использоваться значение скорости изменения относительной дальности  , получаемое доплеровским приемником ГСН.
, получаемое доплеровским приемником ГСН.
Как видно из приведенных описаний, в методах PPN и PPN-I формируемое управляющее ускорение ортогонально вектору скорости ракеты, что обеспечивает «чистое» управление ракетой в смысле соотношения (1), то есть управляющее воздействие изменяет направление вектора скорости ЗУР, не требуя изменения его величины.
В методах TPN и IPN управляющее ускорение в общем случае не ортогонально вектору скорости ракеты  . Реализация требуемого управляющего ускорения вследствие этого предполагает изменение как направления скорости ракеты, так и ее абсолютной величины, то есть необходимо управлять работой двигателя ракеты, причем в некоторых случаях тормозить ракету. Ясно, что в чистом виде методы TPN и IPN не реализуемы. Реализация этих методов без управления скоростью ракеты приводит к изменению их свойств. Ниже исследуются свойства этих методов без управления скоростью ракеты.
. Реализация требуемого управляющего ускорения вследствие этого предполагает изменение как направления скорости ракеты, так и ее абсолютной величины, то есть необходимо управлять работой двигателя ракеты, причем в некоторых случаях тормозить ракету. Ясно, что в чистом виде методы TPN и IPN не реализуемы. Реализация этих методов без управления скоростью ракеты приводит к изменению их свойств. Ниже исследуются свойства этих методов без управления скоростью ракеты.
Анализ уравнений четырех исследуемых методов показывает, что, при их общности, для каждого из них свойственна своя техническая реализация.
Общность технической реализации методов определяется тем, что во всех случаях для измерения вектора угловой скорости линии визирования ракета – цель  используется ГСН (радиолокационная или оптическая). Она же, сопровождая цель, измеряет относительное направление на цель, то есть измеряет вектор
используется ГСН (радиолокационная или оптическая). Она же, сопровождая цель, измеряет относительное направление на цель, то есть измеряет вектор  , необходимый в методе TPN. Общей является также необходимость использования ИНС для измерения вектора скорости ракеты
, необходимый в методе TPN. Общей является также необходимость использования ИНС для измерения вектора скорости ракеты  (для использования его в качестве множителя в уравнении метода или для вычисления вектора
(для использования его в качестве множителя в уравнении метода или для вычисления вектора ).
).
Особенности технической реализации методов определяются возможностью использования ГСН определенного типа.
Сопоставительные данные по рассмотренным методам с учетом возможности их технической реализации сведены в таблицу 1.
Таблица 1
Методы пропорциональной навигации и возможность их реализации с использованием различных типов ГСН

Отметим, что помимо четырех рассматриваемых методов возможны и другие варианты реализации закона пропорциональной навигации (2). Так, работоспособным является аналог метода IPN, в котором вместо вектора  используется скаляр Vсбл:
используется скаляр Vсбл:

Однако качество такого метода, как показывает анализ, ниже, чем у метода IPN.
Метод этого вида использовался в системах наведения ракет 60-х годов прошлого века. При этом взамен величины Vсбл использовалось оценочное значение скорости изменения относительной дальности  на момент встречи ракеты с целью, которое рассчитывалось по результатам прогнозных траекторных оценок движения ракеты и цели и поступало в бортовой вычислитель команд управления ракеты перед ее стартом. Использование приведенного метода можно объяснить недостаточным развитием технологий 1950-х годов и отсутствием элементной базы для построения бортовых измерителей вектора скорости ракеты
на момент встречи ракеты с целью, которое рассчитывалось по результатам прогнозных траекторных оценок движения ракеты и цели и поступало в бортовой вычислитель команд управления ракеты перед ее стартом. Использование приведенного метода можно объяснить недостаточным развитием технологий 1950-х годов и отсутствием элементной базы для построения бортовых измерителей вектора скорости ракеты  . Недостатки системы наведения ракеты компенсировались повышением мощности боевой части, что гарантировало поражение цели.
. Недостатки системы наведения ракеты компенсировались повышением мощности боевой части, что гарантировало поражение цели.
2. Показатели качества наведения
Для оценки качества наведения выберем следующие показатели: величину нормальных ускорений, мгновенный промах и характеристическую управляющую скорость ракеты.
Нормальные ускорения Wр.н, вырабатываемые с учетом возможности технической реализации метода наведения, характеризуют маневренные возможности ракеты, потребные для компенсации начальных ошибок ракеты. При использовании для управления полетом ракеты двигателей поперечного управления (ДПУ) величина Wр.н характеризует потребное значение импульса тяги ДПУ. При аэродинамическом способе управления параметр Wр.н характеризует требования к аэродинамике корпуса ракеты и эффективности ее аэродинамических рулей.
Величина Wр.н определяется величиной требуемого управляющих ускорения  и рассчитывается по результатам моделирования с учетом отсутствия управления абсолютной скоростью ракеты.
и рассчитывается по результатам моделирования с учетом отсутствия управления абсолютной скоростью ракеты.
Более предпочтительным будет тот метод наведения, для реализации которого требуются меньшие управляющие ускорения (при прочих равных).
Мгновенный промах характеризует точность наведения ракеты на цель. Мгновенный промах  представляет собой проекцию вектора относительной дальности
представляет собой проекцию вектора относительной дальности  на плоскость, перпендикулярную вектору
на плоскость, перпендикулярную вектору  (см. рисунок 5).
(см. рисунок 5).

Рис. 5. Определение текущего промаха
При наведении ракеты на цель по методу параллельного сближения и равномерном и прямолинейном полете цели и ракеты мгновенный промах на протяжении всего времени движения ракеты равен нулю (направления векторов и совпадают). При использовании для наведения ракеты на маневрирующую цель закона пропорциональной навигации мгновенный промах равен нулю, как правило, в конце наведения.
Основные соотношения для вычисления мгновенного промаха и параметров, связанных с ним, приведены ниже.
Мгновенный промах определяется как разность векторов:

где τп – время полета, оставшееся до встречи ракеты с целью при их дальнейшем равномерном и прямолинейном движении.
Фазу мгновенного промаха определим как угол между векторами и :

Большое значение показателя φh в конце наведения свидетельствует о низкой эффективности метода наведения: с учетом наличия задержек в контуре самонаведения при отработке команд управления, ракета пролетит мимо цели. Напротив, нулевая фаза является индикатором того, что сигнал ошибки в контуре самонаведения равен нулю ( = 0), то есть реализуется наведение по методу параллельного сближения. В целом показатель φh позволяет судить о динамике сближения векторов
= 0), то есть реализуется наведение по методу параллельного сближения. В целом показатель φh позволяет судить о динамике сближения векторов и
и  при движении ракеты к цели.
при движении ракеты к цели.
Величина мгновенного промаха равна

Скорость изменения относительной дальности до цели равна

Оставшееся время полета τп (в предположении равномерного и прямолинейного движения ракеты и цели) равно
 .
.
Характеристическая управляющая скорость ракеты представляет собой интеграл по времени полета ракеты от функции Wр.н(t):
 ,
,
где tп – продолжительность полета на участке самонаведения.
Этот показатель численно равен величине добавочной скорости, которую приобрела бы ракета под действием только управляющей силы и при отсутствии прочих сил.
Данный показатель позволяет оценивать затрачиваемые ресурсы двигателей (разгонного и/или ДПУ) для управления полетом ракеты. При аэродинамическом способе управления показатель Vхар.упр характеризует степень снижения скорости ракеты из-за потерь, связанных с созданием требуемой подъемной силы. При управлении полетом с помощью ДПУ показатель Vхар.упр определяет потребный запас топлива ДПУ и, косвенно, массу ракеты. Ясно, что чем меньше показатели h и Vхар.упр в конце наведения, тем лучше метод наведения.
3. Оценка методов при наведении на баллистическую цель
3.1. Модель движения баллистической цели
Моделируется движение головной части тактической баллистической ракеты на заключительном участке траектории в верхних слоях стратосферы. При построении траектории цели учитываются наиболее значимые факторы: гравитация и лобовое сопротивление воздуха (действие которых воспринимается как маневрирование цели, главным образом вдоль продольной оси), а также маневр цели в поперечном направлении.
Начало траектории цели задается точкой  и вектором скорости в ней
и вектором скорости в ней  .
.
Действие гравитации задается вектором ускорения свободного падения  . Величина ускорения свободного падения принимается равной g0 = 9,81 м/с2, а направление – противоположно направлению оси Оy ИСК.
. Величина ускорения свободного падения принимается равной g0 = 9,81 м/с2, а направление – противоположно направлению оси Оy ИСК.
Величина лобового сопротивления цели Хл.ц вычисляется по известной в аэродинамике формуле [11][23][24]:
Хл.ц = схqS,
где q = ρVц2/2 – скоростной напор набегающего потока воздуха;
ρ – плотность воздуха в данной точке траектории;
S – площадь миделя цели;
сx – безразмерный аэродинамический коэффициент.
Вектор силы лобового сопротивления направлен противоположно вектору скорости  . Ускорение, создаваемое силой лобового сопротивления, равно
. Ускорение, создаваемое силой лобового сопротивления, равно  , где mц – масса цели. Величины сx и ρ зависят, соответственно, от скорости и высоты.
, где mц – масса цели. Величины сx и ρ зависят, соответственно, от скорости и высоты.
Маневр цели задается вектором ускорений
 ,
,
являющимся функцией времени.
Система дифференциальных уравнений, описывающих движение цели, имеет вид:

Интегрирование данной системы по времени при заданных исходных данных  и известных функциях
и известных функциях  дает траекторию цели
дает траекторию цели  и ее скорость
и ее скорость  .
.
3.2. Определение направления вывода ракеты
Примем, что ракета выводится с начальной (опорной) траектории на участок самонаведения на цель таким образом, чтобы вектор скорости ракеты был направлен в упрежденную точку встречи, рассчитанную исходя из предположения о равномерном движении ракеты и цели, что позволяет реализовать метод параллельного сближения. В связи с неточностью определения координат цели и ракеты радиолокатором, поддерживающим инерциальное управление полетом ракеты до начала самонаведения, и ошибками ИНС, определяющей положение ракеты, вывод ракеты осуществляется с некоторой угловой ошибкой Δα, вследствие чего существует начальный мгновенный промах. Величина угловой ошибки вывода ракеты, как показано в статье [25], зависит от взаимной ориентации радиус-векторов ракеты и цели и точностных характеристик радиолокатора и ИНС и может быть оценена по полученным в статье формулам. В процессе самонаведения ЗУР на цель угловая ошибка вывода ракеты отрабатывается используемым методом самонаведения.
Рассчитаем направление в упрежденную точку встречи из точки начала самонаведения, относительно которого в последующем, задавая угловые ошибки вывода ракеты, будем оценивать качество их отработки при использовании различных методов наведения.
Для упрощения выкладок и большей наглядности положим, что цель и ракета в начале самонаведения находятся в одной плоскости Оху, то есть начальные координаты по оси Оz равны zц0 = 0, zр0 = 0, Vцz0 = 0. Такое предположение не означает перехода к моделированию в одной плоскости, так как в последующем, за счет ненулевой составляющей ускорения маневра Wцмz, движение цели и ракеты приобретает трехмерный характер в системе координат Охуz.
На рисунке 6 показан треугольник сближения «ракета (Р) – цель (Ц) – точка встречи (ТВ)», в котором находятся ракета и цель при их равномерном и прямолинейном движении. Стороны треугольника имеют величины rотн, rр-тв, rц-тв. Углы напротив этих сторон обозначены, соответственно, γ, β, α.

Рис. 6. Схема сближения ракеты и цели
Известными данными для моделирования являются:
Необходимо рассчитать угол αр0, характеризующий направление вектора скорости ракеты  в начале самонаведения в упрежденную точку встречи, относительно которого будет задаваться угловая ошибка вывода Δα.
в начале самонаведения в упрежденную точку встречи, относительно которого будет задаваться угловая ошибка вывода Δα.
Используя теорему синусов, запишем равенство

откуда

где tп – время полета цели до перехвата ракетой; β = αр-ц – αц0.
Угол αр0 рассчитывается как сумма
 (5)
(5)
где

Одновременно из треугольника сближения найдем время tп, оставшееся до встречи, при равномерном и прямолинейном движении ракеты и цели. Это позволит задавать время моделирования перехвата цели при использовании различных методов наведения. С учетом маневрирования цели оно будет не меньше времени tп.
По теореме косинусов

где γ = π – (α + β).
С учетом того, что rц-тв = tпVц0 и rр-тв = tпVр0, получаем уравнение
 ,
,
откуда
 (6)
(6)
3.3. Моделирование движения ЗУР при наведении на цель
Начало траектории ракеты задается точкой  , в которую выведена ракета для последующего самонаведения на цель, и вектором скорости в ней
, в которую выведена ракета для последующего самонаведения на цель, и вектором скорости в ней  .
.
Начальное направление вектора скорости αр0 определяется по формуле (5) и с учетом угловой ошибки вывода Δα, рассчитываемой по формулам, приведенным в статье [25].
С целью выполнения сравнительного кинематического анализа методов наведения принимаем, что на ракету не действует никаких других сил, кроме управляющих ускорений. Начиная с точки вывода ракета наводится на движущуюся цель по одному из методов пропорциональной навигации, описываемых формулами расчета требуемых управляющих ускорений  .
.
Система дифференциальных уравнений, описывающих управляемое движение ракеты к цели, имеет вид:

При описании в п. 1 существа методов наведения было показано, что реализация методов TPN и IPN в общем случае требует изменения скорости ракеты. В связи с тем, что в современных ЗУР отсутствует управление скоростью ракеты, при моделировании необходимо устранить влияние управляющего ускорения на скорость ракеты. С этой целью для методов TPN и IPN при вычислении координат ракеты (четвертое уравнение системы уравнений) используем нормировку скорости ракеты в виде:
 (7)
(7)
Полученная система уравнений, дополненная функциями сx(Vц), ρ(yц) и  для вычисления входящих в ее состав переменных, является замкнутой. При известных исходных данных
для вычисления входящих в ее состав переменных, является замкнутой. При известных исходных данных  она дает траектории ракеты
она дает траектории ракеты  и цели
и цели  и их скорости
и их скорости  .
.
Решение системы уравнений (моделирование движения) осуществляется численными методами в координатной форме в ИСК Oxyz.
Время моделирования tм задается исходя из неравенства tм ≥ tп, где величина tп рассчитывается по формуле (6). Интервал моделирования равен Δt = tм/n, где n – количество шагов моделирования.
Результатом моделирования для ракеты в дискретные моменты времени являются значения ее радиус-вектора  и скорости
и скорости  , где i = 0,…, n–1. Отметим, что для методов TPN и IPN ввиду нормировки (7) значения вектора скорости должны определяться по формуле
, где i = 0,…, n–1. Отметим, что для методов TPN и IPN ввиду нормировки (7) значения вектора скорости должны определяться по формуле

С использованием полученных значений  и
и  вычисляются текущие значения:
вычисляются текущие значения:
Аналогичные вычисления выполняются для цели.
3.4. Оценка качества наведения ракеты
Оценку качества наведения ракеты при использовании различных методов наведения выполним, опираясь на следующие исходные данные.
Цель имеет начальные координаты:
 = (30 000, 60 000, 0)т (в метрах). Скорость цели в начальной точке равна Vц0 = 3000 м/c, угол наклона траектории αц0 = 30º.
= (30 000, 60 000, 0)т (в метрах). Скорость цели в начальной точке равна Vц0 = 3000 м/c, угол наклона траектории αц0 = 30º.
Начальные параметры ракеты равны:
 = (0, 35 000, 0)т (в метрах), Vр0 = 2500 м/c.
= (0, 35 000, 0)т (в метрах), Vр0 = 2500 м/c.
Начальный угол наклона вектора скорости ракеты и время полета ракеты, рассчитанные, соответственно, по формулам (5), (6), равны αр0 = 51,598º, tп = 7,227 с.
Коэффициент метода принимается равным Км = 5.
А. Скорость ракеты постоянна
Ввиду принятого предположения об отсутствии действия на ракету сил (кроме управляющих), скорость ракеты в процессе наведения на цель остается неизменной, равной начальной скорости Vр0.
Для сравнительного анализа вначале выполним расчеты для случая, когда на цель также не действуют никакие силы (  ). Моделирование полета цели и ракеты при наведении по разным методам в этом случае дает траектории, приведенные на рисунке 7.
). Моделирование полета цели и ракеты при наведении по разным методам в этом случае дает траектории, приведенные на рисунке 7.

В рассматриваемом случае наведение для всех методов свелось к методу параллельного сближения. Все методы дают одинаковые результаты (траектории полета ракеты по разным методам наведения на рисунке 7 совпали и накрыты красной траекторией метода PPN). Перехват цели происходит в точке с координатами (11 212, 49 145, 0)т. На протяжении всего полета нормальные ускорения Wр.н, мгновенный промах  и характеристическая управляющая скорость Vхар.упр равны нулю.
и характеристическая управляющая скорость Vхар.упр равны нулю.
При тех же условиях введем начальную угловую ошибку вывода ракеты, равную 1º, при этом αр0 = 52,598º. Графики показателей качества наведения для этого случая приведены на рисунке 8.

Для этих условий начальный промах составляет 300 м. Для его отработки для разных методов требуются ускорения на интервале самонаведения порядка 0,2–3,5 g0, в конце – до 14,5 g0. Величина характеристической управляющей скорости в конце наведения при этом составляет 63–87 м/с.
Из графиков видно, что методы, использующие в качестве параметра для вычисления управляющих ускорений относительную скорость сближения Vсбл (методы IPN и PPN-I), отрабатывают начальную ошибку значительно быстрее, чем методы PPN и TPN, не учитывающие ее. Метод PPN-I, имеющий наилучшие результаты по быстроте отработки начальной ошибки, при этом не требует больших управляющих ускорений и высокой характеристической управляющей скорости.
В методах TPN, IPN, в которых вектор управляющего ускорения в отличие от PPN и PPN-I формируется не ортогонально вектору скорости ракеты, требуемое управляющее ускорение вблизи цели (за 0,5 с до точки встречи) интенсивно возрастает (в случае отсутствия нормировки скорости (7) этого роста нет, однако в этом случае необходимо управлять абсолютной скоростью ракеты).
Далее, приняв начальную угловую ошибку вывода ракеты равной 3º (начальный промах равен 925 м), получаем, что требуемые ускорения для отработки промаха на интервале самонаведения возрастают до 4,1–8,6 g0, характеристическая управляющая скорость – до 164–270 м/с, при этом соотношения показателей, показанные на рисунке 8, для разных методов сохраняются.
Учтем действие на цель сил гравитации и лобового сопротивления воздуха. Графики показателей качества для этого случая, при начальной угловой ошибке равной 1º, приведены на рисунке 9.

При том что показатели качества, показанные на рисунке 8, ухудшились в среднем в 1,5–2 раза, тенденции их изменения и соотношения между ними сохранились.
Далее дополнительно введем боковой маневр цели с ускорением 6g0 в направлении оси Oz. Траектории цели и ракет, наводимых по разным методам, для этого случая приведены на рисунке 10, графики показателей качества – на рисунке 11.


Как следует из приведенных графиков, тенденции показателей и соотношения между ними сохраняются.
Для управления полетом (прежде всего для отработки поперечного ускорения цели 6g0) для разных методов потребны управляющие ускорения до 10–30 g0, а величина характеристической управляющей скорости в конце наведения возрастает до 570–800 м/с. Так как для рассматриваемых высот перехвата цели аэродинамическое управление полетом невозможно, то двигатели поперечного управления для обеспечения полученных значений показателей Wр.н и Vхар.упр должны иметь достаточно высокие тяговые показатели и сохранять их в течение всего времени наведения. Ориентировочный расчет показателей ДПУ и запаса топлива может быть выполнен по методике, приведенной в статье [26].
Б. Переменная скорость ракеты
Оценим свойства методов вне рамок кинематического анализа, с учетом действия на ракету сил гравитации и лобового сопротивления воздуха.
С этой целью модифицируем систему дифференциальных уравнений, описывающих управляемое движение ракеты к цели, – третье уравнение запишем в виде
 ,
,
где  – вектор силы лобового сопротивления для ракеты;
– вектор силы лобового сопротивления для ракеты;
mр – масса ракеты.
Результаты моделирования полета ракеты для этого случая, для наведении по разным методам, при отработке начальной угловой ошибки 1º, действии на цель сил гравитации и лобового сопротивления и боковом маневре цели с ускорением 6g0, приведены на рисунке 12.

Из полученных графиков следует, что при переменной скорости ракеты описанные выше соотношения между показателями качества для разных методов наведения имеют тот же характер, что и при выполненном кинематическом анализе.
В. Результаты оценки методов при варьировании исходных данных
Для оценки степени влияния различных факторов на качество наведения выполнено моделирование наведения ракеты на цель по четырем разным методам пропорциональной навигации с варьированием исходных данных в широких пределах.
Космические исследования и ракетостроение | Для моделирования с учетом возможных параметров траекторий баллистических целей, описанных в [27], принимались следующие значения исходных данных:
- угол наклона траектории цели αц0: 30º, 50º, 80º;
- ускорение бокового маневра цели: 0, 4, 6g0;
- начальная скорость цели Vц0: 3000, 4000, 5500 м/c;
- начальная скорость ракеты Vр0: 2000, 2500, 2800 м/с;
- угловая ошибка вывода ракеты: 0º, 1º, 3º;
- начальная высота цели (координата yц0): 50 000, 60 000, 70 000 м, при этом начальная высота ракеты (координата yр0), соответственно – 25 000, 35 000, 45 000 м;
- коэффициент метода Км: 3, 5, 6, 10.
Моделирование выполнено для наиболее представительных комбинаций перечисленных исходных данных. Ввиду большого объема результатов моделирования графики показателей качества наведения не приводятся.
Во всех случаях характерной тенденцией является существенное (скачкообразное) возрастание формируемых методами TPN и IPN управляющих ускорений вблизи цели (за 1–2 с до встречи ракеты с ней).
Для методов PPN и PPN-I вблизи цели характерен плавный рост управляющих ускорений или даже их постоянство (выход на метод параллельного сближения) – в зависимости от интенсивности маневра цели в соотношении с величинами скорости ракеты и коэффициента метода Км.
Проведена также оценка метода PPN-I при использовании вместо текущей величины относительной скорости сближения Vсбл ее начального значения Vсбл.0, получаемого по данным наземной РЛС (имитация отсутствия информации от доплеровского приемника ГСН ввиду воздействия на него помех). Также выполнена оценка качества метода при использовании на конечном участке наведения ЗУР вместо параметра Vсбл величины  , которая может быть рассчитана по измерениям доплеровского приемника ГСН. Моделирование показало практическую идентичность получаемых результатов, что позволяет отнести повышенное качество метода PPN-I, представленное на приведенных выше графиках, на счет эквивалентного увеличения коэффициента метода Км пропорционально отношению Vсбл/Vр, используемому в методе.
, которая может быть рассчитана по измерениям доплеровского приемника ГСН. Моделирование показало практическую идентичность получаемых результатов, что позволяет отнести повышенное качество метода PPN-I, представленное на приведенных выше графиках, на счет эквивалентного увеличения коэффициента метода Км пропорционально отношению Vсбл/Vр, используемому в методе.
Для различных вариантов исходных данных во всех методах лучшее качество наведения достигается при больших значениях коэффициентах Км (наведение приближается к наведению по методу параллельного сближения). На практике большие значения коэффициента Км не используются ввиду усиления шумов в каналах управления и снижения вследствие этого точности наведения, а также в связи с ростом неустойчивости контура управления (появление переколебаний управляющих ускорений). Вместе с тем, как следует из расчетов, при увеличении коэффициента Км в определенных пределах наблюдается снижение характеристической управляющей скорости ракеты. Коэффициент метода Км, таким образом, является своеобразным параметром компромисса между качеством наведения и ресурсами двигателей ракеты, затрачиваемыми для управления.
Заключение
Выполненный сравнительный кинематический анализ четырех методов пропорциональной навигации (PPN, TPN, IPN, PPN-I) для использования в системе управления ЗУР при наведении на высокоскоростную маневрирующую цель (типа баллистической маневрирующей цели на заключительном участке ее полета) показал предпочтительность методов, формирующих управляющее ускорение ортогонально вектору скорости ракеты – это методы PPN и PPN-I.
Методы TPN и IPN, формирующие управляющее ускорение ортогонально, соответственно, линии визирования ракета – цель, и вектору относительной скорости ракеты, имеют резкий рост управляющих ускорений и рост фазы промаха в конце наведения на маневрирующую цель, что приведет в реальных (не кинематических) системах наведения, которым свойственно наличие ограничений на управление по располагаемым перегрузкам, к росту динамической ошибки наведения и промаху в точке встречи ракеты с целью.
Анализ возможности технической реализации методов показал, что предпочтительными являются методы PPN и TPN, так как они используют меньший набор параметров для формирования управляющего ускорения по сравнению с методами IPN, PPN-I, и эти параметры в любом случае измеряются ГСН и ИНС (это вектор угловой скорости линии визирования ракета – цель  , направление на цель
, направление на цель  , и вектор скорости ракеты
, и вектор скорости ракеты  ). Методы IPN и PPN-I в дополнение к параметрам и требуют вычисления вектора относительной скорости
). Методы IPN и PPN-I в дополнение к параметрам и требуют вычисления вектора относительной скорости  . Использование в методах параметра может привести к ухудшению качества наведения при наличии помех по доплеровскому каналу измерения радиальной скорости цели, которая требуется для вычисления вектора .
. Использование в методах параметра может привести к ухудшению качества наведения при наличии помех по доплеровскому каналу измерения радиальной скорости цели, которая требуется для вычисления вектора .
Таким образом, по совокупности показателей качества наведения и возможности технической реализации, предпочтительным является метод наведения PPN. Кроме этого, данный метод является универсальным – он может применяться в системах неведения как с оптическими, так и радиолокационными ГСН.
1. Под кинематикой понимается математическое описание движения идеализированного тела с использованием законов, определяющих это движение, без рассмотрения причин движения.
Введение. Постановка задачи
Пропорциональная навигация как закон управления полетом является основой для построения современных систем самонаведения ЗУР. Методы пропорциональной навигации, реализующие этот закон в виде управляющих ускорений, обладают рядом свойств, выгодно отличающих их от других методов наведения. Одним из таких свойств является то, что на заключительном участке полета ЗУР, за несколько единиц – десятков секунд до ее встречи с целью, если цель не маневрирует, а ракета выведена на участок самонаведения на цель без существенных угловых ошибок, то наведение осуществляется фактически по методу параллельного сближения. В свою очередь, достоинством метода параллельного сближения является обеспечение наведения ракеты на неманеврирующую цель без поперечных перегрузок. Последнее позволяет сэкономить энергию («располагаемые перегрузки») ракеты для отработки внезапного маневра цели на конечном участке наведения и в итоге минимизировать промах.
Данное свойство пропорциональной навигации особенно актуально при перехвате баллистических целей – для них характерен регулярный (кеплеровский) характер движения вне атмосферы и интенсивное торможение с большими перегрузками (воспринимаемыми системой управления ракеты как маневр) при входе в атмосферу и движении в ней. Кроме того, современные баллистические цели (боевые блоки и головные части баллистических ракет) создаются способными при движении в атмосфере совершать интенсивные маневры и в поперечном направлении за счет использования аэродинамических органов управления. Ранее такими маневрирующими целями были головные части баллистических ракет Pershing II (производство США, ракета снята с вооружения в 1991 г.), а в настоящее время в различных странах мира активно создаются современные виды гиперзвукового оружия, выводимого к цели с использованием баллистических и аэробаллистических траекторий и способного активно маневрировать в стратосфере.
Сам метод параллельного сближения не получил распространения в системах самонаведения ввиду сложности технической реализации, а также недостатков при работе по маневрирующим целям и в условиях переменной скорости ракеты (что характерно для современных твердотопливных ЗУР, имеющих, как правило, короткий разгонный участок и участок пассивного полета, на котором скорость ракеты интенсивно снижается под действием сил сопротивления воздуха и гравитации), в то время как методы пропорциональной навигации в этих условиях имеют хорошие свойства, которые, собственно, и исследуются в настоящей статье.
Другими ценными свойствами пропорциональной навигации как закона управления являются возможность адаптации траектории ракеты к условиям полета за счет изменения всего одного параметра – коэффициента пропорциональности, а также достаточно простая техническая реализация на борту ЗУР.
Основы теории пропорциональной навигации были впервые сформулированы в США в 1943 году (первая известная монография вышла в 1945 г. [1]). Практически одновременно и независимо сходные результаты были получены немецкими учеными при разработке ракетных систем в 1944–1945 годах. В нашей стране эта теория получила развитие и практическое применение в послевоенные годы – уже в начале 1960-х годов на основе пропорциональной навигации были созданы первые системы самонаводящегося зенитного управляемого ракетного оружия С-200 [2–5] и «Куб».
Однако, несмотря на большую историю развития, из-за преимущественно военного применения, прежде всего в системах ракетного вооружения, теория пропорциональной навигации (в трехмерном представлении и в различных возможных вариантах реализации) широкого освещения не получала и стала достоянием общественности только в последние десятилетия.
Сущность и свойства некоторых методов пропорциональной навигации в настоящее время детально описаны и исследованы в специальной литературе. Наиболее значимыми являются работы зарубежных авторов: классические, многократно переизданные труды П. Зарчана (США) [6][7], монография Н. А. Шнейдора (Израиль) [8], статьи Ю. С. Шукла и П. Р. Махапатра (Индия) [9][10]. Среди отечественных публикаций выделяются монографии Е. И. Кринецкого [11], В. Я. Мизрохи [12], фундаментальная монография под ред. И. С. Голубева и В. Г. Светлова [13], лекции А. В. Беляева [14], а также более ранние статьи А. С. Кельзона и В. Л. Кана [15–17], в которых описаны базовые принципы пропорциональной навигации.
В настоящее время в доступной литературе описаны четыре метода пропорциональной навигации. Наиболее известны методы, именуемые в ряде зарубежных работ PPN (Pure Proportional navigation – «чистая пропорциональная навигация») и TPN (True Proportional navigation – «истинная пропорциональная навигация»). Данные названия методов (как и другие) условны и не отражают их сущности и свойств, а используются лишь для различения методов. Известен также метод, получивший в [8] название IPN (Ideal Proportional navigation – «идеальная пропорциональная навигация»). Именно этот метод в большинстве отечественных работ последних десятилетий описывается как метод пропорциональной навигации и рассматривается безальтернативно, как основа современных систем самонаведения ракет (см., например, [12–14]).
Кроме названных методов в англоязычной Википедии [18] при описании пропорциональной навигации приведено соотношение для управляющего ускорения, формируемого по методу (без специального наименования для него), который в настоящей статье для удобства, в силу его свойств, сочетающих свойства методов PPN и IPN, рассматриваемых ниже, обозначен как PPN-I. При этом отсылка Википедии по поводу этого метода к монографии Р. Янушевского [19] несостоятельна – в монографии описан метод IPN.
Все четыре перечисленные метода (PPN, TPN, IPN, PPN-I) отличаются как свойствами, определяющими способность перехвата цели управляемой ракетой, так и возможностями по их технической (аппаратной) реализации.
Несмотря на детальное описание отдельных методов пропорциональной навигации в специальной литературе, вопрос их сравнения и выбора остается открытым. В качестве работ, где выполнено обстоятельное сравнение, но только двух методов – PPN и TPN, можно назвать монографию [8] и статью [9]. Некоторые самые общие сравнительные сведения по методам PPN, TPN и PPN-I приведены в Википедии [18]. Анализ названных методов в перечисленных работах носит формально-математический характер и не позволяет однозначно отдать предпочтение какому-либо методу (за исключением [9], где из пары PPN и TPN более предпочтительным признан метод PPN). В работах П. Зарчана, прежде всего в статье [7], выполнен глубокий, практически-ориентированный анализ, но только одного метода – IPN. Сравнительный анализ всех четырех перечисленных методов (PPN, TPN, IPN, PPN-I) в единой работе отсутствует.
В настоящей работе проводится сравнительная оценка кинематики1 ракеты при использовании четырех названных методов (кинематический анализ) с учетом возможности их технической реализации. При этом учитываются неточность исходных данных в начале этапа самонаведения (ошибки вывода ракеты на самонаведение) и особенности движения цели. Учет влияния помех и инерционности элементов системы самонаведения вынесены за рамки рассмотрения в интересах анализа исключительно кинематических свойств методов.
Постановка задачи. Необходимо выполнить сравнительный кинематический анализ четырех приведенных в различных зарубежных и отечественных источниках методов пропорциональной навигации (PPN, TPN, IPN, PPN-I) при самонаведении ЗУР на маневрирующую баллистическую цель (типа головная часть тактической баллистической ракеты) в верхних слоях стратосферы. Исходными данными для оценки методов являются известные параметры траектории цели (модель цели), высотный диапазон перехвата цели, дальность начала самонаведения ЗУР (определяется потенциалом головки самонаведения (ГСН)), а также ошибки в исходных данных на начальном этапе самонаведения ракеты на цель, обусловленные погрешностями вывода ракеты в точку начала работы ГСН и самонаведения.
Для выполнения сравнительного анализа методов необходимо выбрать и обосновать показатели качества наведения, разработать модель управляемого движения ЗУР, и, далее, оценить значения и характер изменения показателей качества наведения для разных методов в зависимости от траекторных параметров рассматриваемой цели.
Сравнительный анализ необходимо выполнить с учетом возможностей технической реализации методов.
1. Кинематика ракеты и исследуемые методы пропорциональной навигации
Предварительно, с целью задания математического базиса для анализа, опишем кинематику неуправляемой ракеты при абсолютном и относительном (относительно цели) движении в инерциальной системе координат (ИСК).
Прямоугольная ИСК Oxyz задается следующим образом: ее центр совпадает с точкой расположения радиолокатора, осуществляющего выведение ЗУР в точку начала работы ГСН для последующего самонаведения на цель, ось Ox направлена по линии горизонта координат до правой тройки.
ЗУР и цель рассматриваются как материальные точки. При этом с целью анализа только кинематики ЗУР, обусловленной управлением, не рассматриваются силы, определяющие движение ЗУР: тяга двигателей, гравитация и аэродинамические силы. Для цели, движущейся на заключительном участке Кеплеровой траектории, учитываются действие гравитации и лобовое сопротивление воздуха.
Траектория ЗУР в ИСК в каждый момент времени определяется радиус-вектором и вектором скорости :
где хр, yр, zр – координаты ЗУР в ИСК.
Вектор скорости направлен по касательной к траектории в текущей точке.
Текущая дальность до ракеты и ее скорость определяются как модули соответствующих векторов:
Вектор ускорения ракеты определяется как производная по времени от вектора скорости:
Вектор рассматривается как сумма тангенциальной и нормальной составляющих:
Нормальная составляющая вектора ускорения является управляющей и задается метом наведения. Влияние вектора , создаваемого по различным методам наведения, на траекторию ракеты оценивается в настоящей работе. При этом учитывается техническая возможность формирования управляющего ускорения.
Общее уравнение для вектора нормального ускорения имеет вид:
(1)
где – вектор угловой скорости вращения вектора ;
× – знак векторного произведения.
Вектор в текущей точке траектории определяется следующим образом [20]: он лежит в плоскости, перпендикулярной вектору , его модуль равен угловой скорости вращения вектора , а направление таково, что совместно с вектором и единичным вектором нормали, направленной по радиусу кривизны траектории, он образует правую тройку.
Изменение вектора обеспечивает изменение направления полета ЗУР. Для этого применяются аэродинамические или газодинамические способы создания управляющих моментов и сил в поперечном к продольной оси ракеты направлении. Скорость ЗУР Vр (составляющая формулы (1)) не используется для управления направлением полета – понадобилось бы при наведении на маневрирующую цель как ускорять ракету, так и замедлять ее движение, что неприемлемо.
Опишем кинематику движения ракеты относительно цели. При этом траекторию цели считаем известной. Она характеризуется радиус-вектором цели и вектором скорости цели .
Введем векторы относительной дальности и относительной скорости
цели (относительно ракеты) как разности соответствующих векторов цели и ракеты:
Их абсолютные величины равны, соответственно,
.
Для удобства описания и отображения введем вектор скорости сближения ракеты с целью
Вектор угловой скорости вращения вектора относительной дальности (линии визирования ракета – цель) рассчитывается, как показано в [8], с использованием векторного произведения векторов и по формуле
.
Вектор перпендикулярен двум векторам – и , его направление определяется по правилу правой руки. Поясняющая схема приведена на рисунке 1. Вектор на практике измеряется ГСН ЗУР [21][22].
Рис. 1. Определение вектора угловой скорости вращения линии визирования ракета – цель. Красным цветом показана траектория ЗУР, синим – траектория цели. Точки Р и Ц – текущее положение ЗУР и цели соответственно
Описание кинематики управляемой ракеты включает приведенные выше уравнения для описания относительного движения неуправляемой ракеты и уравнение для управляющего ускорения, формируемого в соответствии с одним из анализируемых методов пропорциональной навигации.
Идея пропорциональной навигации как закона наведения заключается в управлении полетом ракеты таким образом, чтобы вектор скорости ракеты поворачивался с угловой скоростью, пропорциональной угловой скорости вращения линии визирования ракета – цель и в том же направлении:
(2)
где – требуемый вектор угловой скорости вращения вектора скорости ракеты;
Км – коэффициент пропорциональности (коэффициент метода, навигационная постоянная),
Км > 1, на практике Км = 2,5 – 8.
Для управления полетом ракеты по закону пропорциональной навигации (2) необходимо создавать соответствующее управляющее (нормальное) ускорение. Общая формула для расчета требуемого управляющего ускорения ракеты, формируемого по закону пропорциональной навигации, имеет вид
(3)
где – векторная величина, имеющая физический смысл скорости.
На основе рассчитанного по формуле (3) управляющего ускорения вырабатываются команды управления полетом ракеты, реализуемые газодинамическими или аэродинамическими органами управления.
Формула (3) в зависимости от способа определения вектора (его направления и величины) задает семейство методов пропорциональной навигации.
Дадим описание отдельных известных методов пропорциональной навигации.
Метод PPN. Для этого метода
= , требуемое управляющее ускорение равно
(4)
Формируемое управляющее ускорение соответствует нормальному ускорению ЗУР (1) – оно ортогонально вектору скорости ЗУР. Взаимосвязь векторов, используемых для формирования управляющего ускорения по методу PPN, показана на рисунке 2.
Рис. 2. Взаимосвязи векторов для метода PPN
На рисунке 2а (общий вид) изображено: вектор (направлен вглубь рисунка) перпендикулярен векторам и , обеспечивая, в соответствии с (4), поворот вектора и связанного с ним вектора в сторону вектора (линии визирования ракета – цель). В итоге при совпадении направлений векторов и , реализуется метод параллельного сближения.
На рисунке 2б для упрощения восприятия показан вид векторов со стороны конца вектора (обозначен точкой в кружке). Принято, что векторы скорости ,
и вектор лежат в одной плоскости (в общем случае это не так) – в плоскости рисунка. Для показанного случая расположения векторов , и вектор угловой скорости направлен перпендикулярно плоскости рисунка в сторону наблюдателя, круговой стрелкой показано направление вращения вектора (и связанного с ним вектора ) относительно вектора .
На практике вектор , используемый в методе, может быть измерен бортовой инерциальной системой наведения (ИНС) ракеты.
Метод TPN. Для этого метода , где – единичный вектор относительной дальности цели. Требуемое управляющее ускорение равно
и формируется ортогонально линии визирования ракета – цель (рис. 3). Требуемое управляющее ускорение метода ТPN в общем случае не ортогонально вектору скорости ЗУР.
Рис. 3. Взаимосвязи векторов для метода ТPN
На практике единичный вектор (направление на цель) измеряется следящей угловой системой ГСН.
Метод IPN. Для этого метода . Требуемое управляющее ускорение равно
и формируется ортогонально вектору скорости сближения ракеты с целью (рис. 4). Требуемое управляющее ускорение в общем случае не ортогонально вектору скорости ЗУР.
Рис. 4. Взаимосвязи векторов для метода IPN
Не имеется технических способов измерения вектора . На практике на борту ЗУР он может быть рассчитан по данным ИНС о векторе скорости ракеты и результатам траекторной обработки измерений, выполняемых доплеровской ГСН. В оптической ГСН техническая реализация измерения относительной скорости цели затруднена (необходимо использовать активный лазерный канал).
Метод PPN-I. Для этого метода =, где – единичный вектор скорости ракеты. Требуемое управляющее ускорение равно
Оно направлено ортогонально вектору скорости ракеты, как в методе PPN (рис. 2), но, в отличие от этого метода, пропорционально величине относительной скорости цели Vсбл, как в методе IPN. Техническая реализация метода, как и метода IPN, в общем случае требует траекторных расчетов по данным доплеровской радиолокационной ГСН. В частном случае в качестве оценки параметра Vсбл может использоваться значение скорости изменения относительной дальности , получаемое доплеровским приемником ГСН.
Как видно из приведенных описаний, в методах PPN и PPN-I формируемое управляющее ускорение ортогонально вектору скорости ракеты, что обеспечивает «чистое» управление ракетой в смысле соотношения (1), то есть управляющее воздействие изменяет направление вектора скорости ЗУР, не требуя изменения его величины.
В методах TPN и IPN управляющее ускорение в общем случае не ортогонально вектору скорости ракеты . Реализация требуемого управляющего ускорения вследствие этого предполагает изменение как направления скорости ракеты, так и ее абсолютной величины, то есть необходимо управлять работой двигателя ракеты, причем в некоторых случаях тормозить ракету. Ясно, что в чистом виде методы TPN и IPN не реализуемы. Реализация этих методов без управления скоростью ракеты приводит к изменению их свойств. Ниже исследуются свойства этих методов без управления скоростью ракеты.
Анализ уравнений четырех исследуемых методов показывает, что, при их общности, для каждого из них свойственна своя техническая реализация.
Общность технической реализации методов определяется тем, что во всех случаях для измерения вектора угловой скорости линии визирования ракета – цель используется ГСН (радиолокационная или оптическая). Она же, сопровождая цель, измеряет относительное направление на цель, то есть измеряет вектор , необходимый в методе TPN. Общей является также необходимость использования ИНС для измерения вектора скорости ракеты (для использования его в качестве множителя в уравнении метода или для вычисления вектора).
Особенности технической реализации методов определяются возможностью использования ГСН определенного типа.
Сопоставительные данные по рассмотренным методам с учетом возможности их технической реализации сведены в таблицу 1.
Таблица 1
Методы пропорциональной навигации и возможность их реализации с использованием различных типов ГСН
Отметим, что помимо четырех рассматриваемых методов возможны и другие варианты реализации закона пропорциональной навигации (2). Так, работоспособным является аналог метода IPN, в котором вместо вектора используется скаляр Vсбл:
Однако качество такого метода, как показывает анализ, ниже, чем у метода IPN.
Метод этого вида использовался в системах наведения ракет 60-х годов прошлого века. При этом взамен величины Vсбл использовалось оценочное значение скорости изменения относительной дальности на момент встречи ракеты с целью, которое рассчитывалось по результатам прогнозных траекторных оценок движения ракеты и цели и поступало в бортовой вычислитель команд управления ракеты перед ее стартом. Использование приведенного метода можно объяснить недостаточным развитием технологий 1950-х годов и отсутствием элементной базы для построения бортовых измерителей вектора скорости ракеты . Недостатки системы наведения ракеты компенсировались повышением мощности боевой части, что гарантировало поражение цели.
2. Показатели качества наведения
Для оценки качества наведения выберем следующие показатели: величину нормальных ускорений, мгновенный промах и характеристическую управляющую скорость ракеты.
Нормальные ускорения Wр.н, вырабатываемые с учетом возможности технической реализации метода наведения, характеризуют маневренные возможности ракеты, потребные для компенсации начальных ошибок ракеты. При использовании для управления полетом ракеты двигателей поперечного управления (ДПУ) величина Wр.н характеризует потребное значение импульса тяги ДПУ. При аэродинамическом способе управления параметр Wр.н характеризует требования к аэродинамике корпуса ракеты и эффективности ее аэродинамических рулей.
Величина Wр.н определяется величиной требуемого управляющих ускорения и рассчитывается по результатам моделирования с учетом отсутствия управления абсолютной скоростью ракеты.
Более предпочтительным будет тот метод наведения, для реализации которого требуются меньшие управляющие ускорения (при прочих равных).
Мгновенный промах характеризует точность наведения ракеты на цель. Мгновенный промах представляет собой проекцию вектора относительной дальности на плоскость, перпендикулярную вектору (см. рисунок 5).
Рис. 5. Определение текущего промаха
При наведении ракеты на цель по методу параллельного сближения и равномерном и прямолинейном полете цели и ракеты мгновенный промах на протяжении всего времени движения ракеты равен нулю (направления векторов и совпадают). При использовании для наведения ракеты на маневрирующую цель закона пропорциональной навигации мгновенный промах равен нулю, как правило, в конце наведения.
Основные соотношения для вычисления мгновенного промаха и параметров, связанных с ним, приведены ниже.
Мгновенный промах определяется как разность векторов:
где τп – время полета, оставшееся до встречи ракеты с целью при их дальнейшем равномерном и прямолинейном движении.
Фазу мгновенного промаха определим как угол между векторами и :
Большое значение показателя φh в конце наведения свидетельствует о низкой эффективности метода наведения: с учетом наличия задержек в контуре самонаведения при отработке команд управления, ракета пролетит мимо цели. Напротив, нулевая фаза является индикатором того, что сигнал ошибки в контуре самонаведения равен нулю ( = 0), то есть реализуется наведение по методу параллельного сближения. В целом показатель φh позволяет судить о динамике сближения векторов и при движении ракеты к цели.
Величина мгновенного промаха равна
Скорость изменения относительной дальности до цели равна
Оставшееся время полета τп (в предположении равномерного и прямолинейного движения ракеты и цели) равно
.
Характеристическая управляющая скорость ракеты представляет собой интеграл по времени полета ракеты от функции Wр.н(t):
,
где tп – продолжительность полета на участке самонаведения.
Этот показатель численно равен величине добавочной скорости, которую приобрела бы ракета под действием только управляющей силы и при отсутствии прочих сил.
Данный показатель позволяет оценивать затрачиваемые ресурсы двигателей (разгонного и/или ДПУ) для управления полетом ракеты. При аэродинамическом способе управления показатель Vхар.упр характеризует степень снижения скорости ракеты из-за потерь, связанных с созданием требуемой подъемной силы. При управлении полетом с помощью ДПУ показатель Vхар.упр определяет потребный запас топлива ДПУ и, косвенно, массу ракеты. Ясно, что чем меньше показатели h и Vхар.упр в конце наведения, тем лучше метод наведения.
3. Оценка методов при наведении на баллистическую цель
3.1. Модель движения баллистической цели
Моделируется движение головной части тактической баллистической ракеты на заключительном участке траектории в верхних слоях стратосферы. При построении траектории цели учитываются наиболее значимые факторы: гравитация и лобовое сопротивление воздуха (действие которых воспринимается как маневрирование цели, главным образом вдоль продольной оси), а также маневр цели в поперечном направлении.
Начало траектории цели задается точкой и вектором скорости в ней .
Действие гравитации задается вектором ускорения свободного падения . Величина ускорения свободного падения принимается равной g0 = 9,81 м/с2, а направление – противоположно направлению оси Оy ИСК.
Величина лобового сопротивления цели Хл.ц вычисляется по известной в аэродинамике формуле [11][23][24]:
Хл.ц = схqS,
где q = ρVц2/2 – скоростной напор набегающего потока воздуха;
ρ – плотность воздуха в данной точке траектории;
S – площадь миделя цели;
сx – безразмерный аэродинамический коэффициент.
Вектор силы лобового сопротивления направлен противоположно вектору скорости . Ускорение, создаваемое силой лобового сопротивления, равно , где mц – масса цели. Величины сx и ρ зависят, соответственно, от скорости и высоты.
Маневр цели задается вектором ускорений
,
являющимся функцией времени.
Система дифференциальных уравнений, описывающих движение цели, имеет вид:
Интегрирование данной системы по времени при заданных исходных данных и известных функциях дает траекторию цели и ее скорость .
3.2. Определение направления вывода ракеты
Примем, что ракета выводится с начальной (опорной) траектории на участок самонаведения на цель таким образом, чтобы вектор скорости ракеты был направлен в упрежденную точку встречи, рассчитанную исходя из предположения о равномерном движении ракеты и цели, что позволяет реализовать метод параллельного сближения. В связи с неточностью определения координат цели и ракеты радиолокатором, поддерживающим инерциальное управление полетом ракеты до начала самонаведения, и ошибками ИНС, определяющей положение ракеты, вывод ракеты осуществляется с некоторой угловой ошибкой Δα, вследствие чего существует начальный мгновенный промах. Величина угловой ошибки вывода ракеты, как показано в статье [25], зависит от взаимной ориентации радиус-векторов ракеты и цели и точностных характеристик радиолокатора и ИНС и может быть оценена по полученным в статье формулам. В процессе самонаведения ЗУР на цель угловая ошибка вывода ракеты отрабатывается используемым методом самонаведения.
Рассчитаем направление в упрежденную точку встречи из точки начала самонаведения, относительно которого в последующем, задавая угловые ошибки вывода ракеты, будем оценивать качество их отработки при использовании различных методов наведения.
Для упрощения выкладок и большей наглядности положим, что цель и ракета в начале самонаведения находятся в одной плоскости Оху, то есть начальные координаты по оси Оz равны zц0 = 0, zр0 = 0, Vцz0 = 0. Такое предположение не означает перехода к моделированию в одной плоскости, так как в последующем, за счет ненулевой составляющей ускорения маневра Wцмz, движение цели и ракеты приобретает трехмерный характер в системе координат Охуz.
На рисунке 6 показан треугольник сближения «ракета (Р) – цель (Ц) – точка встречи (ТВ)», в котором находятся ракета и цель при их равномерном и прямолинейном движении. Стороны треугольника имеют величины rотн, rр-тв, rц-тв. Углы напротив этих сторон обозначены, соответственно, γ, β, α.
Рис. 6. Схема сближения ракеты и цели
Известными данными для моделирования являются:
Необходимо рассчитать угол αр0, характеризующий направление вектора скорости ракеты в начале самонаведения в упрежденную точку встречи, относительно которого будет задаваться угловая ошибка вывода Δα.
Используя теорему синусов, запишем равенство
откуда
где tп – время полета цели до перехвата ракетой; β = αр-ц – αц0.
Угол αр0 рассчитывается как сумма
(5)
где
Одновременно из треугольника сближения найдем время tп, оставшееся до встречи, при равномерном и прямолинейном движении ракеты и цели. Это позволит задавать время моделирования перехвата цели при использовании различных методов наведения. С учетом маневрирования цели оно будет не меньше времени tп.
По теореме косинусов
где γ = π – (α + β).
С учетом того, что rц-тв = tпVц0 и rр-тв = tпVр0, получаем уравнение
,
откуда
(6)
3.3. Моделирование движения ЗУР при наведении на цель
Начало траектории ракеты задается точкой , в которую выведена ракета для последующего самонаведения на цель, и вектором скорости в ней .
Начальное направление вектора скорости αр0 определяется по формуле (5) и с учетом угловой ошибки вывода Δα, рассчитываемой по формулам, приведенным в статье [25].
С целью выполнения сравнительного кинематического анализа методов наведения принимаем, что на ракету не действует никаких других сил, кроме управляющих ускорений. Начиная с точки вывода ракета наводится на движущуюся цель по одному из методов пропорциональной навигации, описываемых формулами расчета требуемых управляющих ускорений .
Система дифференциальных уравнений, описывающих управляемое движение ракеты к цели, имеет вид:
При описании в п. 1 существа методов наведения было показано, что реализация методов TPN и IPN в общем случае требует изменения скорости ракеты. В связи с тем, что в современных ЗУР отсутствует управление скоростью ракеты, при моделировании необходимо устранить влияние управляющего ускорения на скорость ракеты. С этой целью для методов TPN и IPN при вычислении координат ракеты (четвертое уравнение системы уравнений) используем нормировку скорости ракеты в виде:
(7)
Полученная система уравнений, дополненная функциями сx(Vц), ρ(yц) и для вычисления входящих в ее состав переменных, является замкнутой. При известных исходных данных она дает траектории ракеты и цели и их скорости .
Решение системы уравнений (моделирование движения) осуществляется численными методами в координатной форме в ИСК Oxyz.
Время моделирования tм задается исходя из неравенства tм ≥ tп, где величина tп рассчитывается по формуле (6). Интервал моделирования равен Δt = tм/n, где n – количество шагов моделирования.
Результатом моделирования для ракеты в дискретные моменты времени являются значения ее радиус-вектора и скорости , где i = 0,…, n–1. Отметим, что для методов TPN и IPN ввиду нормировки (7) значения вектора скорости должны определяться по формуле
С использованием полученных значений и вычисляются текущие значения:
Аналогичные вычисления выполняются для цели.
3.4. Оценка качества наведения ракеты
Оценку качества наведения ракеты при использовании различных методов наведения выполним, опираясь на следующие исходные данные.
Цель имеет начальные координаты:
= (30 000, 60 000, 0)т (в метрах). Скорость цели в начальной точке равна Vц0 = 3000 м/c, угол наклона траектории αц0 = 30º.
Начальные параметры ракеты равны:
= (0, 35 000, 0)т (в метрах), Vр0 = 2500 м/c.
Начальный угол наклона вектора скорости ракеты и время полета ракеты, рассчитанные, соответственно, по формулам (5), (6), равны αр0 = 51,598º, tп = 7,227 с.
Коэффициент метода принимается равным Км = 5.
А. Скорость ракеты постоянна
Ввиду принятого предположения об отсутствии действия на ракету сил (кроме управляющих), скорость ракеты в процессе наведения на цель остается неизменной, равной начальной скорости Vр0.
Для сравнительного анализа вначале выполним расчеты для случая, когда на цель также не действуют никакие силы ( ). Моделирование полета цели и ракеты при наведении по разным методам в этом случае дает траектории, приведенные на рисунке 7.
В рассматриваемом случае наведение для всех методов свелось к методу параллельного сближения. Все методы дают одинаковые результаты (траектории полета ракеты по разным методам наведения на рисунке 7 совпали и накрыты красной траекторией метода PPN). Перехват цели происходит в точке с координатами (11 212, 49 145, 0)т. На протяжении всего полета нормальные ускорения Wр.н, мгновенный промах и характеристическая управляющая скорость Vхар.упр равны нулю.
При тех же условиях введем начальную угловую ошибку вывода ракеты, равную 1º, при этом αр0 = 52,598º. Графики показателей качества наведения для этого случая приведены на рисунке 8.
Для этих условий начальный промах составляет 300 м. Для его отработки для разных методов требуются ускорения на интервале самонаведения порядка 0,2–3,5 g0, в конце – до 14,5 g0. Величина характеристической управляющей скорости в конце наведения при этом составляет 63–87 м/с.
Из графиков видно, что методы, использующие в качестве параметра для вычисления управляющих ускорений относительную скорость сближения Vсбл (методы IPN и PPN-I), отрабатывают начальную ошибку значительно быстрее, чем методы PPN и TPN, не учитывающие ее. Метод PPN-I, имеющий наилучшие результаты по быстроте отработки начальной ошибки, при этом не требует больших управляющих ускорений и высокой характеристической управляющей скорости.
В методах TPN, IPN, в которых вектор управляющего ускорения в отличие от PPN и PPN-I формируется не ортогонально вектору скорости ракеты, требуемое управляющее ускорение вблизи цели (за 0,5 с до точки встречи) интенсивно возрастает (в случае отсутствия нормировки скорости (7) этого роста нет, однако в этом случае необходимо управлять абсолютной скоростью ракеты).
Далее, приняв начальную угловую ошибку вывода ракеты равной 3º (начальный промах равен 925 м), получаем, что требуемые ускорения для отработки промаха на интервале самонаведения возрастают до 4,1–8,6 g0, характеристическая управляющая скорость – до 164–270 м/с, при этом соотношения показателей, показанные на рисунке 8, для разных методов сохраняются.
Учтем действие на цель сил гравитации и лобового сопротивления воздуха. Графики показателей качества для этого случая, при начальной угловой ошибке равной 1º, приведены на рисунке 9.
При том что показатели качества, показанные на рисунке 8, ухудшились в среднем в 1,5–2 раза, тенденции их изменения и соотношения между ними сохранились.
Далее дополнительно введем боковой маневр цели с ускорением 6g0 в направлении оси Oz. Траектории цели и ракет, наводимых по разным методам, для этого случая приведены на рисунке 10, графики показателей качества – на рисунке 11.
Как следует из приведенных графиков, тенденции показателей и соотношения между ними сохраняются.
Для управления полетом (прежде всего для отработки поперечного ускорения цели 6g0) для разных методов потребны управляющие ускорения до 10–30 g0, а величина характеристической управляющей скорости в конце наведения возрастает до 570–800 м/с. Так как для рассматриваемых высот перехвата цели аэродинамическое управление полетом невозможно, то двигатели поперечного управления для обеспечения полученных значений показателей Wр.н и Vхар.упр должны иметь достаточно высокие тяговые показатели и сохранять их в течение всего времени наведения. Ориентировочный расчет показателей ДПУ и запаса топлива может быть выполнен по методике, приведенной в статье [26].
Б. Переменная скорость ракеты
Оценим свойства методов вне рамок кинематического анализа, с учетом действия на ракету сил гравитации и лобового сопротивления воздуха.
С этой целью модифицируем систему дифференциальных уравнений, описывающих управляемое движение ракеты к цели, – третье уравнение запишем в виде
,
где – вектор силы лобового сопротивления для ракеты;
mр – масса ракеты.
Результаты моделирования полета ракеты для этого случая, для наведении по разным методам, при отработке начальной угловой ошибки 1º, действии на цель сил гравитации и лобового сопротивления и боковом маневре цели с ускорением 6g0, приведены на рисунке 12.
Из полученных графиков следует, что при переменной скорости ракеты описанные выше соотношения между показателями качества для разных методов наведения имеют тот же характер, что и при выполненном кинематическом анализе.
В. Результаты оценки методов при варьировании исходных данных
Для оценки степени влияния различных факторов на качество наведения выполнено моделирование наведения ракеты на цель по четырем разным методам пропорциональной навигации с варьированием исходных данных в широких пределах.
Космические исследования и ракетостроение | Для моделирования с учетом возможных параметров траекторий баллистических целей, описанных в [27], принимались следующие значения исходных данных:
- угол наклона траектории цели αц0: 30º, 50º, 80º;
- ускорение бокового маневра цели: 0, 4, 6g0;
- начальная скорость цели Vц0: 3000, 4000, 5500 м/c;
- начальная скорость ракеты Vр0: 2000, 2500, 2800 м/с;
- угловая ошибка вывода ракеты: 0º, 1º, 3º;
- начальная высота цели (координата yц0): 50 000, 60 000, 70 000 м, при этом начальная высота ракеты (координата yр0), соответственно – 25 000, 35 000, 45 000 м;
- коэффициент метода Км: 3, 5, 6, 10.
Моделирование выполнено для наиболее представительных комбинаций перечисленных исходных данных. Ввиду большого объема результатов моделирования графики показателей качества наведения не приводятся.
Во всех случаях характерной тенденцией является существенное (скачкообразное) возрастание формируемых методами TPN и IPN управляющих ускорений вблизи цели (за 1–2 с до встречи ракеты с ней).
Для методов PPN и PPN-I вблизи цели характерен плавный рост управляющих ускорений или даже их постоянство (выход на метод параллельного сближения) – в зависимости от интенсивности маневра цели в соотношении с величинами скорости ракеты и коэффициента метода Км.
Проведена также оценка метода PPN-I при использовании вместо текущей величины относительной скорости сближения Vсбл ее начального значения Vсбл.0, получаемого по данным наземной РЛС (имитация отсутствия информации от доплеровского приемника ГСН ввиду воздействия на него помех). Также выполнена оценка качества метода при использовании на конечном участке наведения ЗУР вместо параметра Vсбл величины , которая может быть рассчитана по измерениям доплеровского приемника ГСН. Моделирование показало практическую идентичность получаемых результатов, что позволяет отнести повышенное качество метода PPN-I, представленное на приведенных выше графиках, на счет эквивалентного увеличения коэффициента метода Км пропорционально отношению Vсбл/Vр, используемому в методе.
Для различных вариантов исходных данных во всех методах лучшее качество наведения достигается при больших значениях коэффициентах Км (наведение приближается к наведению по методу параллельного сближения). На практике большие значения коэффициента Км не используются ввиду усиления шумов в каналах управления и снижения вследствие этого точности наведения, а также в связи с ростом неустойчивости контура управления (появление переколебаний управляющих ускорений). Вместе с тем, как следует из расчетов, при увеличении коэффициента Км в определенных пределах наблюдается снижение характеристической управляющей скорости ракеты. Коэффициент метода Км, таким образом, является своеобразным параметром компромисса между качеством наведения и ресурсами двигателей ракеты, затрачиваемыми для управления.
Заключение
Выполненный сравнительный кинематический анализ четырех методов пропорциональной навигации (PPN, TPN, IPN, PPN-I) для использования в системе управления ЗУР при наведении на высокоскоростную маневрирующую цель (типа баллистической маневрирующей цели на заключительном участке ее полета) показал предпочтительность методов, формирующих управляющее ускорение ортогонально вектору скорости ракеты – это методы PPN и PPN-I.
Методы TPN и IPN, формирующие управляющее ускорение ортогонально, соответственно, линии визирования ракета – цель, и вектору относительной скорости ракеты, имеют резкий рост управляющих ускорений и рост фазы промаха в конце наведения на маневрирующую цель, что приведет в реальных (не кинематических) системах наведения, которым свойственно наличие ограничений на управление по располагаемым перегрузкам, к росту динамической ошибки наведения и промаху в точке встречи ракеты с целью.
Анализ возможности технической реализации методов показал, что предпочтительными являются методы PPN и TPN, так как они используют меньший набор параметров для формирования управляющего ускорения по сравнению с методами IPN, PPN-I, и эти параметры в любом случае измеряются ГСН и ИНС (это вектор угловой скорости линии визирования ракета – цель , направление на цель , и вектор скорости ракеты ). Методы IPN и PPN-I в дополнение к параметрам и требуют вычисления вектора относительной скорости . Использование в методах параметра может привести к ухудшению качества наведения при наличии помех по доплеровскому каналу измерения радиальной скорости цели, которая требуется для вычисления вектора .
Таким образом, по совокупности показателей качества наведения и возможности технической реализации, предпочтительным является метод наведения PPN. Кроме этого, данный метод является универсальным – он может применяться в системах неведения как с оптическими, так и радиолокационными ГСН.
1. Под кинематикой понимается математическое описание движения идеализированного тела с использованием законов, определяющих это движение, без рассмотрения причин движения.