From Wikipedia, the free encyclopedia
In digital transmission, the number of bit errors is the numbers of received bits of a data stream over a communication channel that have been altered due to noise, interference, distortion or bit synchronization errors.
The bit error rate (BER) is the number of bit errors per unit time. The bit error ratio (also BER) is the number of bit errors divided by the total number of transferred bits during a studied time interval. Bit error ratio is a unitless performance measure, often expressed as a percentage.[1]
The bit error probability pe is the expected value of the bit error ratio. The bit error ratio can be considered as an approximate estimate of the bit error probability. This estimate is accurate for a long time interval and a high number of bit errors.
Example[edit]
As an example, assume this transmitted bit sequence:
1 1 0 0 0 1 0 1 1
and the following received bit sequence:
0 1 0 1 0 1 0 0 1,
The number of bit errors (the underlined bits) is, in this case, 3. The BER is 3 incorrect bits divided by 9 transferred bits, resulting in a BER of 0.333 or 33.3%.
Packet error ratio[edit]
The packet error ratio (PER) is the number of incorrectly received data packets divided by the total number of received packets. A packet is declared incorrect if at least one bit is erroneous. The expectation value of the PER is denoted packet error probability pp, which for a data packet length of N bits can be expressed as
 ,
,

assuming that the bit errors are independent of each other. For small bit error probabilities and large data packets, this is approximately

Similar measurements can be carried out for the transmission of frames, blocks, or symbols.
The above expression can be rearranged to express the corresponding BER (pe) as a function of the PER (pp) and the data packet length N in bits:
![{\displaystyle p_{e}=1-{\sqrt[{N}]{(1-p_{p})}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f5d380e45b0451c45265e199221fae5bd5b84bf9)
Factors affecting the BER[edit]
In a communication system, the receiver side BER may be affected by transmission channel noise, interference, distortion, bit synchronization problems, attenuation, wireless multipath fading, etc.
The BER may be improved by choosing a strong signal strength (unless this causes cross-talk and more bit errors), by choosing a slow and robust modulation scheme or line coding scheme, and by applying channel coding schemes such as redundant forward error correction codes.
The transmission BER is the number of detected bits that are incorrect before error correction, divided by the total number of transferred bits (including redundant error codes). The information BER, approximately equal to the decoding error probability, is the number of decoded bits that remain incorrect after the error correction, divided by the total number of decoded bits (the useful information). Normally the transmission BER is larger than the information BER. The information BER is affected by the strength of the forward error correction code.
Analysis of the BER[edit]
The BER may be evaluated using stochastic (Monte Carlo) computer simulations. If a simple transmission channel model and data source model is assumed, the BER may also be calculated analytically. An example of such a data source model is the Bernoulli source.
Examples of simple channel models used in information theory are:
- Binary symmetric channel (used in analysis of decoding error probability in case of non-bursty bit errors on the transmission channel)
- Additive white Gaussian noise (AWGN) channel without fading.
A worst-case scenario is a completely random channel, where noise totally dominates over the useful signal. This results in a transmission BER of 50% (provided that a Bernoulli binary data source and a binary symmetrical channel are assumed, see below).
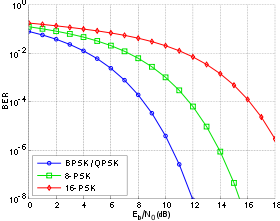

In a noisy channel, the BER is often expressed as a function of the normalized carrier-to-noise ratio measure denoted Eb/N0, (energy per bit to noise power spectral density ratio), or Es/N0 (energy per modulation symbol to noise spectral density).
For example, in the case of QPSK modulation and AWGN channel, the BER as function of the Eb/N0 is given by:
 .[2]
.[2]
People usually plot the BER curves to describe the performance of a digital communication system. In optical communication, BER(dB) vs. Received Power(dBm) is usually used; while in wireless communication, BER(dB) vs. SNR(dB) is used.
Measuring the bit error ratio helps people choose the appropriate forward error correction codes. Since most such codes correct only bit-flips, but not bit-insertions or bit-deletions, the Hamming distance metric is the appropriate way to measure the number of bit errors. Many FEC coders also continuously measure the current BER.
A more general way of measuring the number of bit errors is the Levenshtein distance.
The Levenshtein distance measurement is more appropriate for measuring raw channel performance before frame synchronization, and when using error correction codes designed to correct bit-insertions and bit-deletions, such as Marker Codes and Watermark Codes.[3]
Mathematical draft[edit]
The BER is the likelihood of a bit misinterpretation due to electrical noise  . Considering a bipolar NRZ transmission, we have
. Considering a bipolar NRZ transmission, we have
 for a «1» and
for a «1» and  for a «0». Each of
for a «0». Each of  and
and  has a period of
has a period of  .
.
Knowing that the noise has a bilateral spectral density  ,
,
is 
and is  .
.
Returning to BER, we have the likelihood of a bit misinterpretation  .
.
 and
and 
where  is the threshold of decision, set to 0 when
is the threshold of decision, set to 0 when  .
.
We can use the average energy of the signal  to find the final expression :
to find the final expression :

±§
Bit error rate test[edit]
BERT or bit error rate test is a testing method for digital communication circuits that uses predetermined stress patterns consisting of a sequence of logical ones and zeros generated by a test pattern generator.
A BERT typically consists of a test pattern generator and a receiver that can be set to the same pattern. They can be used in pairs, with one at either end of a transmission link, or singularly at one end with a loopback at the remote end. BERTs are typically stand-alone specialised instruments, but can be personal computer–based. In use, the number of errors, if any, are counted and presented as a ratio such as 1 in 1,000,000, or 1 in 1e06.
Common types of BERT stress patterns[edit]
- PRBS (pseudorandom binary sequence) – A pseudorandom binary sequencer of N Bits. These pattern sequences are used to measure jitter and eye mask of TX-Data in electrical and optical data links.
- QRSS (quasi random signal source) – A pseudorandom binary sequencer which generates every combination of a 20-bit word, repeats every 1,048,575 words, and suppresses consecutive zeros to no more than 14. It contains high-density sequences, low-density sequences, and sequences that change from low to high and vice versa. This pattern is also the standard pattern used to measure jitter.
- 3 in 24 – Pattern contains the longest string of consecutive zeros (15) with the lowest ones density (12.5%). This pattern simultaneously stresses minimum ones density and the maximum number of consecutive zeros. The D4 frame format of 3 in 24 may cause a D4 yellow alarm for frame circuits depending on the alignment of one bits to a frame.
- 1:7 – Also referred to as 1 in 8. It has only a single one in an eight-bit repeating sequence. This pattern stresses the minimum ones density of 12.5% and should be used when testing facilities set for B8ZS coding as the 3 in 24 pattern increases to 29.5% when converted to B8ZS.
- Min/max – Pattern rapid sequence changes from low density to high density. Most useful when stressing the repeater’s ALBO feature.
- All ones (or mark) – A pattern composed of ones only. This pattern causes the repeater to consume the maximum amount of power. If DC to the repeater is regulated properly, the repeater will have no trouble transmitting the long ones sequence. This pattern should be used when measuring span power regulation. An unframed all ones pattern is used to indicate an AIS (also known as a blue alarm).
- All zeros – A pattern composed of zeros only. It is effective in finding equipment misoptioned for AMI, such as fiber/radio multiplex low-speed inputs.
- Alternating 0s and 1s — A pattern composed of alternating ones and zeroes.
- 2 in 8 – Pattern contains a maximum of four consecutive zeros. It will not invoke a B8ZS sequence because eight consecutive zeros are required to cause a B8ZS substitution. The pattern is effective in finding equipment misoptioned for B8ZS.
- Bridgetap — Bridge taps within a span can be detected by employing a number of test patterns with a variety of ones and zeros densities. This test generates 21 test patterns and runs for 15 minutes. If a signal error occurs, the span may have one or more bridge taps. This pattern is only effective for T1 spans that transmit the signal raw. Modulation used in HDSL spans negates the bridgetap patterns’ ability to uncover bridge taps.
- Multipat — This test generates five commonly used test patterns to allow DS1 span testing without having to select each test pattern individually. Patterns are: all ones, 1:7, 2 in 8, 3 in 24, and QRSS.
- T1-DALY and 55 OCTET — Each of these patterns contain fifty-five (55), eight bit octets of data in a sequence that changes rapidly between low and high density. These patterns are used primarily to stress the ALBO and equalizer circuitry but they will also stress timing recovery. 55 OCTET has fifteen (15) consecutive zeroes and can only be used unframed without violating one’s density requirements. For framed signals, the T1-DALY pattern should be used. Both patterns will force a B8ZS code in circuits optioned for B8ZS.
Bit error rate tester[edit]
A bit error rate tester (BERT), also known as a «bit error ratio tester»[4] or bit error rate test solution (BERTs) is electronic test equipment used to test the quality of signal transmission of single components or complete systems.
The main building blocks of a BERT are:
- Pattern generator, which transmits a defined test pattern to the DUT or test system
- Error detector connected to the DUT or test system, to count the errors generated by the DUT or test system
- Clock signal generator to synchronize the pattern generator and the error detector
- Digital communication analyser is optional to display the transmitted or received signal
- Electrical-optical converter and optical-electrical converter for testing optical communication signals
See also[edit]
- Burst error
- Error correction code
- Errored second
- Pseudo bit error ratio
- Viterbi Error Rate
References[edit]
- ^ Jit Lim (14 December 2010). «Is BER the bit error ratio or the bit error rate?». EDN. Retrieved 2015-02-16.
- ^
Digital Communications, John Proakis, Massoud Salehi, McGraw-Hill Education, Nov 6, 2007 - ^
«Keyboards and Covert Channels»
by Gaurav Shah, Andres Molina, and Matt Blaze (2006?) - ^ «Bit Error Rate Testing: BER Test BERT » Electronics Notes». www.electronics-notes.com. Retrieved 2020-04-11.
![]() This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
External links[edit]
- QPSK BER for AWGN channel – online experiment
6.1. Определения коэффициента ошибок
6.2. Математическое выражение коэффициента битовых ошибок
6.3. Нормы на параметры ошибок систем передачи
6.4. Принципы построения измерителей ошибок
6.5. Техника измерения коэффициента ошибок
6.1. Определения коэффициента ошибок
Коэффициент ошибок – важнейшая характеристика линейного тракта. Он измеряется как для отдельных участков регенерации, так и для тракта в целом. Определяется коэффициент ошибок kОШ, по формуле:
kОШ = NОШ /N, (6.1)
где N – общее число символов, переданных за интервал измерения; NОШ – число ошибочно принятых символов за интервал измерения.
Измерение коэффициента ошибок носит статистический характер, так как получаемый за конечное время результат является случайной величиной. Относительную погрешность измерения в случае нормального закона распределения числа ошибок, что допустимо при N≥10, можно определить по формуле:
 . (6.2)
. (6.2)
Здесь ![]() — коэффициент, зависящий от доверительной вероятности результата измерений:
— коэффициент, зависящий от доверительной вероятности результата измерений:
![]() , (6.3)
, (6.3)
где ![]() — обратная функция интеграла вероятности
— обратная функция интеграла вероятности ![]() :
:
![]() . (6.4)
. (6.4)
Значение kОШ позволяет оценивать вероятность ошибки pОШ – количественную оценку помехоустойчивости. Область возможных значений оценки, в которой с заданной доверительной вероятностью будет находиться значение pОШ, определяется верхней (pВ) и нижней (pН) доверительными границами. При нормальном законе распределения числа ошибок значения pВ и pН определяются по формулам:
![]() , (6.5)
, (6.5)
![]() , (6.6)
, (6.6)
Очевидно, что точность оценок вероятности ошибки и коэффициента ошибки растет с увеличением N. Общее число символов цифрового сигнала, переданных за интервал измерения T, зависит от скорости передачи B: N = TB. Отсюда следует, что чем больше скорость передачи, тем быстрее и точнее можно оценить коэффициент ошибок.
6.2. Математическое выражение коэффициента битовых ошибок
Определим коэффициент битовых ошибок для реальных приёмников, которым свойственно наличие различных источников шумов. При этом будем считать, что приёмник принимает решение, какой бит (0 или 1) был передан в каждом битовом интервале путем стробирования фототока. Очевидно, что из-за наличия шумов данное решение может быть неверным, что приводит к появлению ошибочных битов. Поэтому, чтобы определить коэффициент битовых ошибок, необходимо понять, каким образом приемник принимает решение относительно переданного бита.
Обозначим через I1 и I0 фототоки, стробированные приемником в течение 1 и 0 битов, соответственно, а через s12 и s02 соответствующие шумы. Принимая, что последние имеют гауссовское распределение, проблема установления истинного значения принятого бита имеет следующую математическую формулировку. Фототок для битов 1 и 0 является выборкой гауссовской переменной со средним значением I1 и вариацией s1, а приёмник должен отслеживать этот сигнал и решать, является ли переданный бит 0 или 1. При этом существует много возможных правил принятия решения, которые могут быть реализованы в приёмнике с целью минимизации коэффициента битовых ошибок. Для значения фототока I этим оптимальным решением является наиболее вероятное значение переданного бита, которое определяется путём сравнения текущего значения фототока с пороговым значением Iп, используемым для принятия решения.
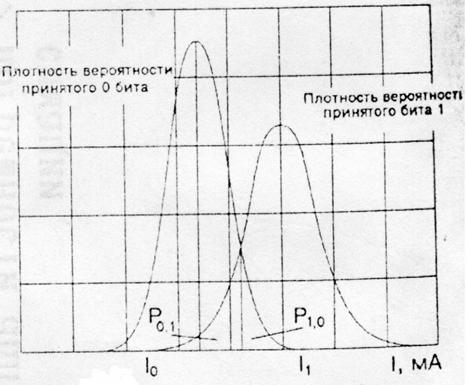
Рисунок 6.1. Функция плотности вероятности фототока принятых сигналов
Пусть при I ³ Iп принимается решение о том, что был передан бит 1, в противном случае – бит 0. Когда биты 1 и 0 равновероятны, что и рассматривается в дальнейшем, пороговый ток приблизительно равен:
![]() (6.7)
(6.7)
Геометрически Iп представляет собой значение тока I, для которого две кривые плотности вероятностей (рис. 6.1) пересекаются.
Вероятность того, что I < Iп, т. е. вероятность ошибки при передаче бита 1, обозначим через Р0,1, а вероятность решения для переданного бита 1, когда I ³ Iп при переданном 0, обозначим Р1,0.
Пусть Q(х) обозначает вероятность того, что нулевая средняя вариация гауссовской переменной превышает значение х, тогда:
 (6.8)
(6.8)
а
 (6.9)
(6.9)
а
 (6.10)
(6.10)
Можно показать [14], что BER определяется,
 (6.11)
(6.11)
Очень важно отметить, что в ряде случаев эффективным является использование изменяемого в зависимости от уровня сигнала порога принятия решения, как, например, шума оптического усилителя. Многие высокоскоростные приёмники обладают такой особенностью. Однако более простые приемники имеют порог, соответствующий среднему уровню принимаемого тока, а именно (I1 + I0)/2. Такая настройка порогового значения дает большой коэффициент битовых ошибок, определяемый выражением [14].
 (6.12)
(6.12)
Выражение (6.11) можно использовать для оценки BER, когда известны как мощность полученного сигнала, соответствующего битам 0 и 1, так и статистика шумов.
6.3. Нормы на параметры ошибок систем передачи
Битовые ошибки являются основным источником ухудшения качества связи, проявляющегося в искажении речи в телефонных каналах, недостоверности передачи информации или снижении пропускной способности передачи данных, и характеризуются статистическими параметрами и нормами на них, которые определены соответствующей вероятностью выполнения этих норм. Последние делятся на долговременные и оперативные нормы, первые из которых определяются рекомендациями ITU-T G.821 и G.826, а вторые – М.2100, М.2110 и М.2120, при этом, согласно М.2100, качество цифрового тракта по критерию ошибок делят на три категории:
- нормальное – BER < 10-6;
- пониженное – 10-6 ≤ BER < 10-3 (предаварийное состояние);
- неприемлемое – BER ≥ 10-3 (аварийное состояние).
Так как появление ошибок является следствием совокупности всех текущих условий передачи цифровых сигналов, имеющих случайный характер, то при отсутствии данных о законе распределения ошибок его отдельные элементы могут быть определены с определенной степенью достоверности только по результатам продолжительных измерений. В то же время на практике необходимо, чтобы значения параметров ошибок для ввода в эксплуатацию и технического обслуживания систем передачи основывались на достаточно коротких интервалах времени измерения. Исходя из этого, были определены следующие параметры ошибок [14]:
- секунда с ошибками (error second, ES) – односекундный интервал, содержащий хотя бы один ошибочный бит;
- секунда, пораженная ошибками (severely error second, SES) – односекундный интервал с BER ≥ 10-3.
Данные параметры ошибок должны оцениваться в течение времени готовности (available time), отсчет которого начинается с первой секунды из десяти следующих друг за другом секунд, в каждой из которых BER<10-3. ITU-T M.2100 регламентирует нормы качества (performance objectives, PO) на выраженные максимальным процентом времени параметры ошибок, которые зависят только от скорости передачи и приводятся для условного эталонного соединения (hypothetical reference connection, HRC/HRX/) длиной 27500 км. При этом нормы качества распределяются по участкам соединения соответствующей категории качества. В качестве эталонной модели такого распределения принимается участок высокой категории качества протяженностью 25000 км, которому присваивается 40% от общей нормы качества на параметры ошибок передачи точка-точка, что в пересчете на 1 км, дает 0.0016 %/км.. Остальные 4 участка (2 среднего качества и 2 с приемлемым качеством) длиной 2 х 1250 км расположены по обе стороны от центрального. Поэтому распределение, пропорциональное протяженности L км тракта высокой категории качества, будет определяться, как
AL = 0.0016 · L %/км. (6.13)
Нормы качества на цифровые тракты и каналы подразделяются на настроечные и эксплуатационные, причем вводимые в эксплуатацию впервые или после проведения корректирующих действий они должны сдаваться по настроечным нормам качества, а в процессе эксплуатации должны соответствовать эксплуатационным нормам. Обычно [105] эксплуатационная норма представляется в виде эталонной нормы качества (reference performance objective, RPO)
RPO = A · T · PO, (6.14)
а настроечная, включающая запас на старение, используемая при вводе в эксплуатацию (bringing into service objective, BISO), определяется, как половина RPO, т.е.
BISO = RPO/2. (6.15)
Здесь PO – норма качества оцениваемого параметра, а T = 86400 с (одни сутки) – продолжительность измерений (количество односекундных интервалов).
Для анализа результатов, полученных в процессе измерений, используются также предельные значения S1и S2 норм (рисунок 6.2), которые соответствуют числу событий (ES,SES) и определяются, как:
S1 = RPO/2 – D и S2 = RPO/2 + D, (6.16)
где D = 2![]() — дисперсия оцениваемого параметра.
— дисперсия оцениваемого параметра.
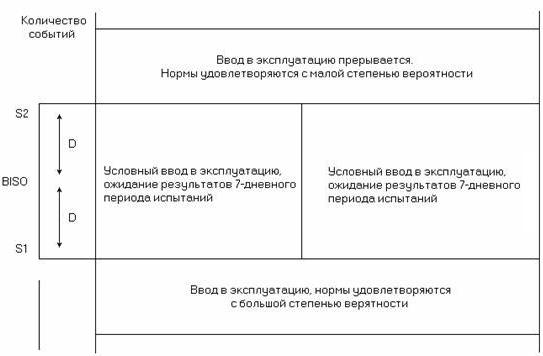
Рисунок 6.2. Предельные значения и условия ввода в эксплуатацию системы передачи
При соответствии результатов измерений норме S1 цифровой тракт может быть введен в эксплуатацию без всякого сомнения, а при превышении нормы S2 в обязательном порядке требуется повышение качества испытываемого цифрового тракта, т.е. должны быть проведены корректирующие действия с повторными измерениями. Если значение ES или SES лежит в интервале от S1 до S2, цифровой тракт может быть введен в эксплуатацию условно или временно с продолжением измерений в течение 7 суток. Данный подход к оценке качества цифровых систем передачи по параметрам ошибок позволяет сократить время измерений и получить норму цифрового тракта суммированием норм цифровых участков. При этом значения RPO, D, S1 и S2 выражаются в виде числа событий за установленный интервал времени, а не в виде процентов времени.
Для измерения коэффициента ошибок разработан ряд специальных BER анализаторов – измерителей коэффициента ошибок, включающих генераторы псевдослучайных и детерминированных последовательностей передаваемых кодированных символов, а также приемное оборудование, осуществляющее собственно измерение коэффициента ошибок. В случае посимвольного сравнения кодов измерение может быть выполнено с использованием шлейфа, т.е. путем измерения ошибок с одной оконечной станции при установке на противоположном конце шлейфа. Другой метод основан на выделении ошибок благодаря избыточности используемых кодов и используется для измерений от передающей до приемной сторон тракта или участка линии, т.е. когда выделение и фиксация ошибок производятся на ее приемном конце. Очевидно, что в первом случае требуется использование одного комплекта, а во втором – двух комплектов приборов. При этом измеренное значение коэффициента ошибок отражает качество передачи при прохождении сигнала в обоих направлениях и в каждом направлении соответственно.
6.4. Принципы построения измерителей ошибок
В зависимости от скорости передачи контролируемой системы передачи в анализаторе используются различные схемотехнические решения.
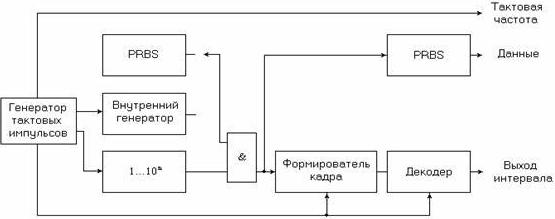
Рисунок 6.3. Генератор низкоскоростного BER анализатора
Низкоскоростной генератор тестовых кодов и детектор ошибок. Используемый в телекоммуникациях анализатор BER, состоящий [106] из генератора тестовых кодов и собственно анализатора ошибок, представлен на рисунках 6.3 и 6.4. Он предназначен для невысоких (до 200 Мбит/с) битовых скоростей, учитывая, что максимальные типовые скорости составляют 44.736 Мбит/с (DS3) в Северной Америке и 139.364 Мбит/с – за пределами Северной Америки.
PRBS с генератором кодовых групп, представленный на рис. 6.16, синхронизируется либо от источника тактового сигнала с фиксированной частотой (согласно G.703), либо от синтезатора, осуществляя тем самым изменение частоты синхронизации. В связи с этим использование данных средств требует задания некоторых определенных частот синхронизации и наличия возможности обеспечения их небольших смещений от ±15 до ±50 ppm. Для повторения тестовых кодов схема PRBS и генератор кодовых групп обычно имеют триггерную схему, управляющую либо выходным усилителем бинарных данных, который обеспечивает данные и данные с сопровождающим синхросигналом, либо выходную схему кодированных данных. Это позволяет создавать цикловую синхронизацию сигнала в соответствии с требованием, например, системы SONET/SDH. Кроме этого, данная схема способствует созданию соответствующего интерфейсного кода для эффективного восстановления тактовой синхронизации. Выходной усилитель обеспечивает необходимый уровень сигнала в соответствии со спецификацией электрического интерфейса, в том числе сигнала с чередованием полярности импульсов.
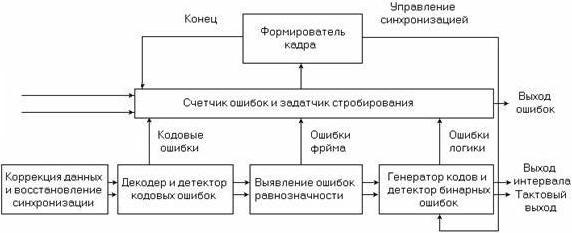
Рисунок 6.4. Низкоскоростной детектор ошибок
Детектор ошибок, показанный на рисунке 6.4, получает стандартный кодированный сигнал, восстанавливает генератор синхросигнала и устраняет кодирование для обеспечения бинарной даты и синхросигналов. Он обнаруживает любые нарушения алгоритма интерфейсного кода и посылает сигналы на счетчик ошибок, что составляет первый уровень процесса обнаружения ошибок. При работе с цикловыми сигналами приемник захватывает любой присутствующий элемент цикловой синхронизации, проверяет наличие цикловых ошибок и декодирует любые встроенные сигналы тревоги, или CRC биты, тем самым обеспечивая возможность измерения.
Наконец, бинарные данные и синхросигнал направляются на детектор ошибок и генератор эталонных тестовых кодов, которые проверяют полученный тестовый код бит за битом на предмет обнаружения логических ошибок. Временная база контролирует пропускание измерения для непрерывного, периодического и ручного режима. Накопленное количество ошибок обрабатывается для получения значения BER и анализа функционирования при наличии ошибок.
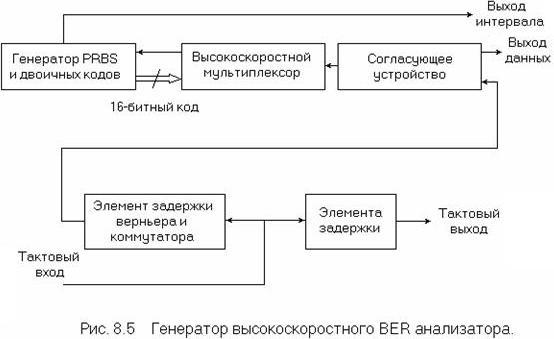
Высокоскоростной генератор тестовых кодов и детектор ошибок. На рисунках 6.5 и 6.6 показаны схемы [14] для 3 Гбит/с генератора тестовых кодов и детектора ошибок. Вследствие высокой битовой скорости генерация последовательных PRBS и кодовых групп на этой скорости не представляется целесообразной. Поэтому тестовые коды генерируются (рисунок 6.5) как параллельные 16-битные кодовые группы при максимальной скорости 200 Мбит/с, используя затем выполненные по биполярной технологии регистраторы смещения и высокоемкостную память. Высокоскоростные схемы обычно выполняются на основе арсенид-галлиевых логических схем, преобразующих параллельные данные в последовательный поток на скорости до 3 Гбит/с.
Согласно данной схеме, вход синхросигнала генерируется синтезатором частоты, согласующее устройство управляется через линию фиксированной задержки, а генератор тестовых кодов и выходной усилитель синхронизируются через схему дискретной и плавно изменяемой задержки, так что фаза синхросигнала/данных может изменяться как в положительном направлении, так и в отрицательном. Дискретные значения задержки составляют 250, 500 и 1000 пс, тогда как диапазон плавной задержки лежит в пределах от 0 до 250 пс с 1 пс инкрементом.
Корректор временной диаграммы, связанный с выходным усилителем, пересинхронизирует данные через триггер D типа для поддержания минимального фазового дрожания. Так как подобный тип тестового устройства обычно используется при проведении лабораторных измерений, выходные уровни синхросигнала и данных и постоянные смещения могут варьироваться для того или иного конкретного случая использования.
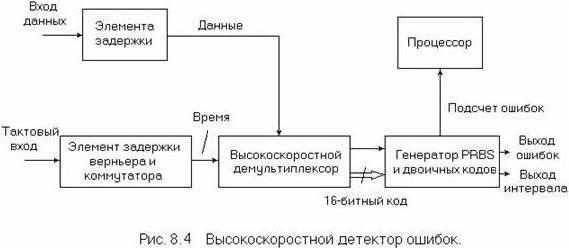
Детектор ошибок, показанный на рис. 6.6, имеет простое параллельное соединение, в связи с чем входы синхросигнала и данных проходят через схемы дискретной и плавной задержки, обеспечивая оптимальную настройку при обнаружении ошибок для любой фазы синхросигнала/данных. Действительно, путем настройки под контролем внутреннего процессора решающего порога и фазы синхросигнала условия функционирования детектора ошибок могут быть оптимизированы автоматически. Высокоскоростной демультиплексор преобразует последовательный поток данных в 16-битные параллельные кодовые группы наряду с поделенным на 16 синхросигналом. Параллельно соединенный генератор эталонных тестовых кодов синхронизируется с входными данными и осуществляет сравнение битов, поэтому любая ошибка фиксируется одним из двух счетчиков, первый из которых подсчитывает число ошибок, а второй – общее число битов. Процессор измерения обеспечивает анализ функционирования при наличии ошибок с разрешением до 1 мс.
6.5. Техника измерения коэффициента ошибок
Рассмотрим измерение коэффициента ошибок путем посимвольного сравнения и подсчета ошибочно принятых элементарных импульсов. Для этого вначале (перед измерением) на передающей станции с помощью оптического аттенюатора устанавливают заданный в технических условиях на аппаратуру линейного тракта уровень оптического излучения. Затем на передающем конце подключают генератор испытательных сигналов, а на приемном – измеритель коэффициента ошибок и, изменяя значения уровней средней мощности, измеряют коэффициент ошибок. Время измерения определяют в зависимости от скорости передачи, объема информации и значений коэффициента ошибок Кошi (BERi).
Коэффициент ошибок при заданном уровне оптического излучения вычисляют по формуле [14]
![]() (6.17)
(6.17)
где
![]() ,
,  , (6.18)
, (6.18)
где ![]() и
и ![]() — погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
— погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
При
оценке энергетического выигрыша
кодирования кодов, различающихся длиной
блока и кодовой скоростью, более удобной
оказывается характеристика
помехоустойчивости, выражаемая через
вероятность ошибки на двоичный символ
(бит).
Соотношение
между вероятностями ошибки декодирования
слова и ошибки на бит определяется
структурой порождающей матрицы
конкретного кода. Однако для обобщенного
анализа могут быть получены простые
границы для вероятности ошибки на бит.
Пусть длительность сеанса связи
составляет 1с. Тогда за сеанс связи может
быть передано 1/TW
кодовых слов, которые содержат k/TW
информационных символов. Количество
ошибочно принятых кодовых слов равно
PWk/TW.
Если через k0
обозначить количество ошибочно
принятых информационных символов при
каждом ошибочно принятом кодовом слове,
то вероятность ошибки на бит будет равна
![]()
. (3.19)
Проблема
заключается в определении величины k0.
В наихудшем случае ошибочный прием
кодового слова сопровождается ошибочным
приемом всех k
информационных символов. Тогда
получаем верхнюю границу
![]()
. (3.20)
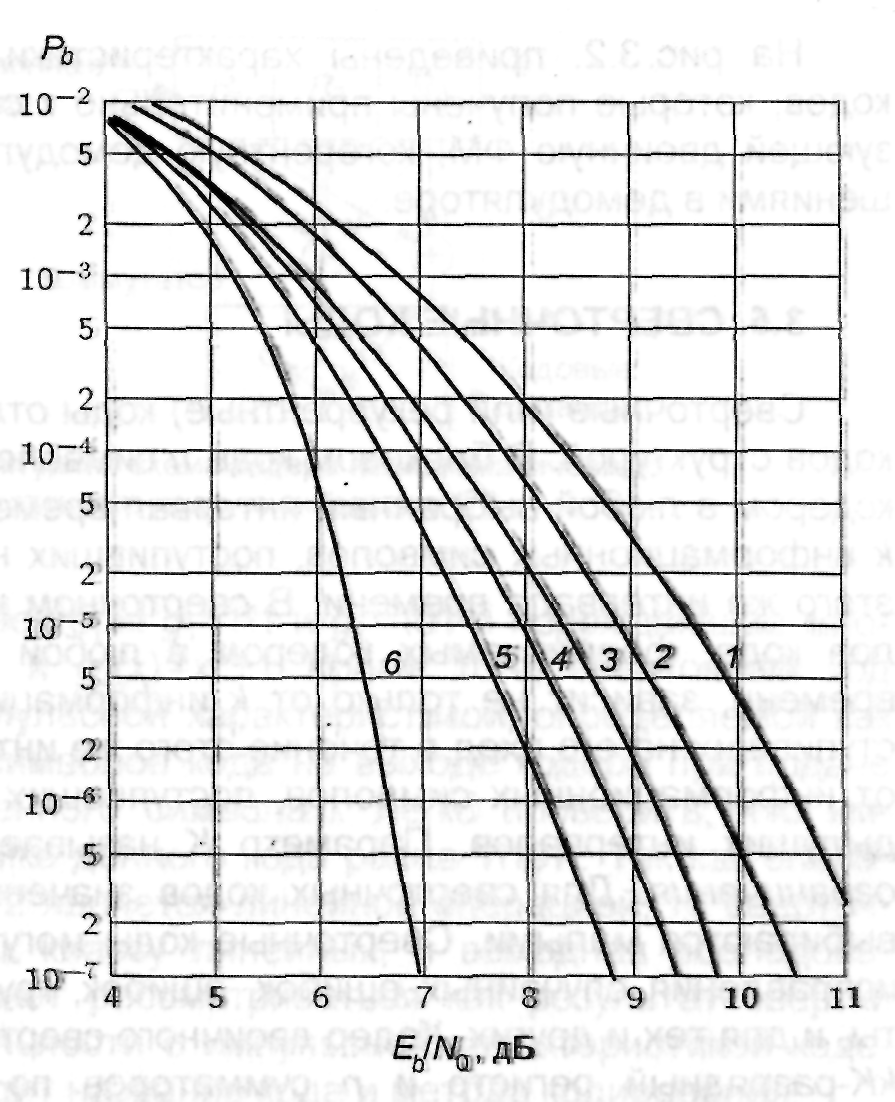
Рис.3.2.
Характеристики помехоустойчивости
блоковых кодов: 1 – без кодирования; 2 –
код Хэмминга (7, 4); 3 – код Хэмминга
(15, 11); 4 – код Хэмминга (31, 26); 5 – код
Голея (24, 12); 6 – код БЧХ (127, 64)
В
лучшем случае ошибочный прием кодового
слова приводит к единственной ошибке
в информационных символах. Поэтому для
нижней границы имеем k0=1
и
![]()
. (3.21)
Для
малых значений k
верхняя и нижняя границы становятся
строгими, и для оценки вероятности
ошибки на бит может быть использована
вероятность ошибочного приема слова.
Для высоких значений Eb/N0
вероятность ошибки на символ оказывается
чрезвычайно малой и ошибки при
декодировании кодовых слов с большой
вероятностью возникают при появлении
(t+1) ошибочных символов.
Из этих (t+1) ошибочных
символов в среднем (t+1)/n
относится к информационным. В результате
![]()
, (3.22)
![]()
. (3.23)
На
рис. 3.2. приведены характеристики
некоторых блоковых кодов, которые
получены применительно к системе связи,
использующей двоичную ФМ, когерентную
демодуляцию с жесткими решениями в
демодуляторе.
3.5. Сверточные коды
Сверточные
(или рекуррентные) коды отличаются от
блоковых кодов структурой. В блоковом
коде n символов кода, формируемых
кодером в любой выбранный интервал
времени, зависят только от k
информационных символов, поступивших
на его вход в течение этого же интервала
времени. В сверточном коде блок из n
символов кода, формируемых кодером
в любой выбранный интервал времени,
зависит не только от k
информационных символов, поступивших
на его вход в течение этого же интервала
времени, но и от информационных символов,
поступивших в течение (K–1)
предыдущих интервалов. Параметр K
называется длиной кодового
ограничения. Для сверточных кодов
значение параметров n и k
выбираются малыми. Сверточные коды
могут использоваться для исправления
случайных ошибок, ошибок, группирующихся
в пакеты, и для тех и других. Кодер
двоичного сверточиого кода содержит
kK-разрядный регистр
и n сумматоров по mod
2. Обобщенная структурная схема кодера
сверточного кода приведена на рис.3.3.
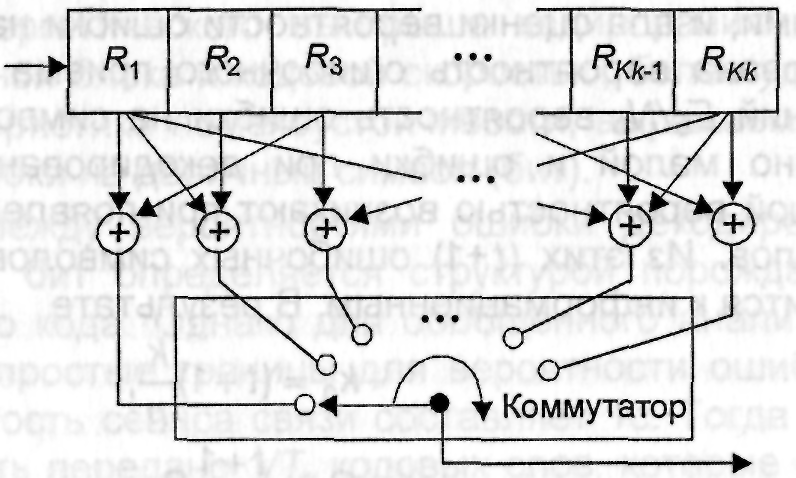
Рис.
3.3. Обобщенная структурная схема
кодера сверточного кода
На
рис. 3.4 приведены пример кодера сверточного
кода с параметрами k =1,
n = 2,
K = 3,
Rk = 1/2.
Информационные символы поступают на
вход регистра, а символы кода формируются
на выходе коммутатора. Коммутатор (КМ)
последовательно опрашивает выходы
сумматоров по mod 2 в течение
интервала времени, равного длительности
информационного символа (бита).
Схема
подключения сумматоров по mod
2, значения k, n и K
полностью описывают сверточный код. Их
можно определить с помощью генераторных
векторов или многочленов. Например,
сверточный код, формируемый кодером,
изображенным на рис.3.4,
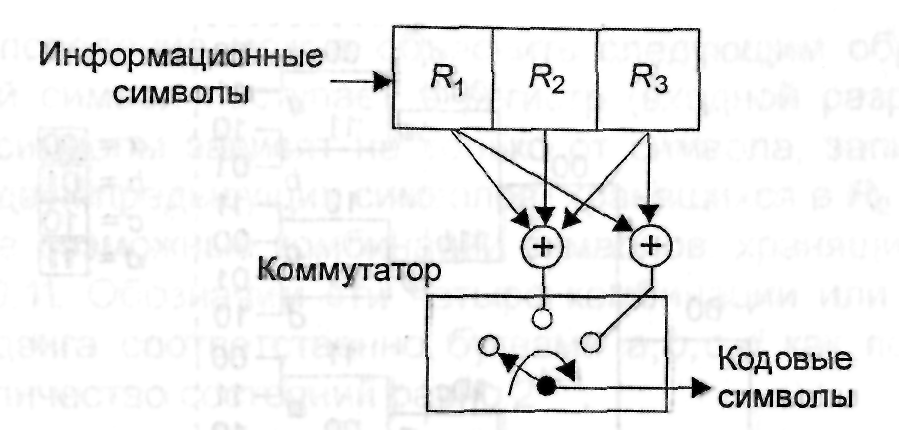
Рис.
3.4. Структурная
схема кодера несистематического
сверточного кода со скоростью 1/2
Информационные
символы имеет порождающие векторы
g1 = 111
и g2 = 101
и порождающие многочлены g1(х) = х2+х+1
и g2(х)=х2+1.
Кроме того, сверточный код может быть
задан импульсной характеристикой,
определяемой как последовательность
символов кода на выходе кодера при
подаче на его вход единственного символа
1. Легко проверить, что импульсная
характеристика данного кода равна
111011. Так как операция сложения по mod
2 является линейной операцией, то
сверточные коды относятся к классу
линейных, и выходная последовательность
кодера может рассматриваться как
результат свертки входной последовательности
с импульсной характеристикой кодера.
Отсюда и происходит название кода и
метода кодирования.
Процедуры
кодирования и декодирования удобно
описывать с помощью так называемого
кодового дерева, которое отображает
последовательности на выходе кодера
для любой возможной входной
последовательности. На рис. 3.5 приведено
кодовое дерево кодера, изображенного
на рис. 3.4, для блока из пяти информационных
символов. Если первый символ принимает
значение 0, то на выходе кодера формируется
пара символов 00. Если первый символ
принимает значение 1, то на выходе кодера
формируется пара символов 11. Это показано
с помощью двух ветвей, которые выходят
из начального узла. Верхняя ветвь
соответствует 0, нижняя – 1. В каждом из
последующих узлов ветвление происходит
аналогичным образом: из каждого узла
исходит две ветви, причем верхняя ветвь
соответствует 0, а нижняя – 1. Ветвление
будет происходить вплоть до последнего
символа входного блока. Вслед за ним
все входные символы принимают значение
0, и образуется только одна обрывающаяся
ветвь. Таким образом, каждой из возможных
входных комбинаций информационных
символов соответствует своя вершина
на кодовом дереве. В данном случае
имеется 32 вершины. С помощью кодового
дерева легко построить выходную
последовательность символов кода,
соответствующую определенной входной
последовательности. Например, входной
последовательности 11010 соответствует
выходная последовательность, лежащая
на пути, изображенном пунктирной линией.

Рис.3.5.
Кодовое дерево для кодера, изображенного
на рис. 3.4
Анализируя
структуру кодового дерева на рис. 3.5,
можно заметить, что, начиная с узлов
третьего уровня, она носит повторяющийся
характер. Действительно, группа ветвей,
заключенных в прямоугольники, изображенные
пунктирными линиями, полностью совпадают.
Это означает, что при поступлении на
вход четвертого символа выходной символ
кода будет одним и тем же, независимо
от того, каким был первый входной символ:
0 или 1. Другими словами, после первых
трех групп выходных символов кода
входные последовательности 1x1x2x3x4…
и 0x1x2x3x4…
будут порождать один и тот же выходной
символ.
Обозначим
четыре узла третьего уровня, т.е. узлы,
в которых происходит третье ветвление,
буквами a,b,c,d.
Повторяющаяся структура ветвей имеет
место и для узлов четвертого и пятого
уровней, поэтому их также можно обозначить
этими же буквами. Для узлов пятого уровня
любой из четырех комбинаций (11,10,01, 00)
первых двух входных символов будет
соответствовать один и тот же выходной
символ.
Такое
поведение можно объяснить следующим
образом. Когда входной символ поступает
в регистр (входной разряд R1),
то выходные символы зависят не только
от символа, записанного в R1,
но и от двух предыдущих символов,
хранящихся в R2
и R3.
Имеется четыре возможные комбинации
символов, хранящихся в R2
и R3:
00, 01, 10, 11. Обозначим эти четыре комбинации
или состояния регистра сдвига
соответственно буквами a,
b, c,
d как показано на
рис. 3.5. Количество состояний равно 2K–1.
Входные
символы 0 и 1 будут формировать четыре
различные комбинации выходных символов
в зависимости от состояния кодера. Если
входной символ 0, то на выходе декодера
будут формироваться 00, 10, 11 или 01 в
зависимости от того, в каком состоянии
находился кодер: a, b,
c или d.
To же самое правило можно
применить относительно символа 1.
Таким
образом, поведение кодера можно полностью
описать с помощью диаграммы состояний,
изображенной на рис. 3.6, а или
направленного графа с четырьмя состояниями
(рис. 3.6, б) который устанавливает
однозначное соответствие между входными
и выходными символами кодера. На графе
сплошные линии соответствуют входному
символу 0, а пунктирные – символу 1.
Например, если кодер находится в состоянии
а и на вход поступает 1, то на выходе
декодера будет формироваться комбинация
11 (пунктирная линия) и декодер перейдет
в состояние b,
соответствующее R3 = 0
и R2 = 1
– Аналогичным образом при поступлении
0 декодер останется в состоянии а
(сплошная линия) и на выходе будет
формироваться комбинация 00.
Заметим,
что прямой переход из состояния а в
состояние с или d
невозможен, причем из любого состояния
прямой переход возможен только в одно
из двух состояний. Диаграмма состояний
содержит исчерпывающую информацию о
структуре кодового дерева.
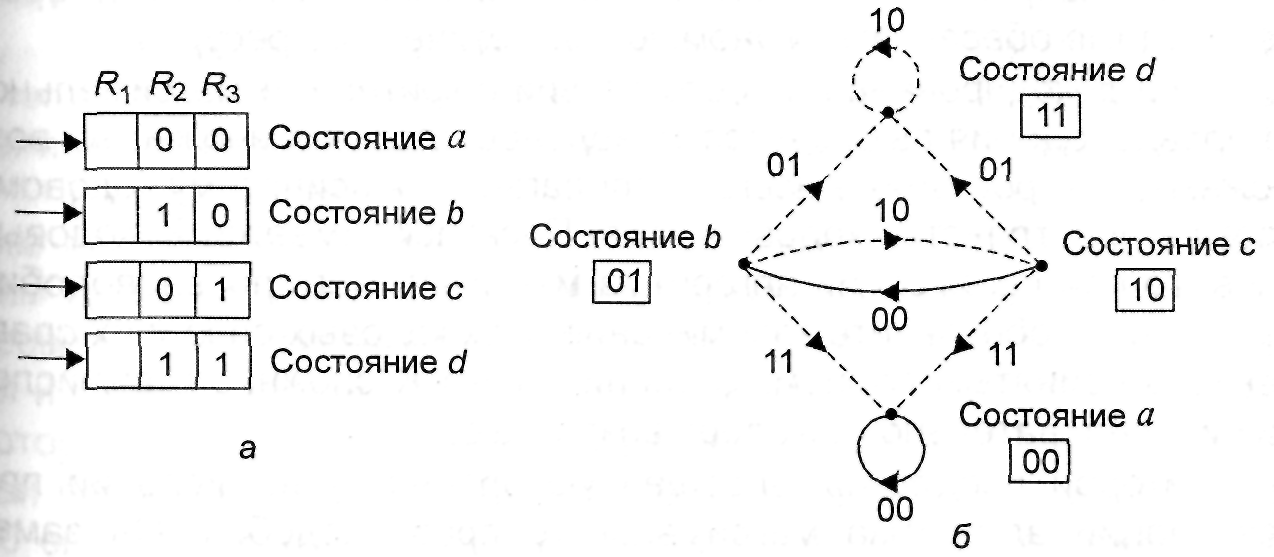
Рис.
3.6. Диаграмма состояний для кодера,
изображенного на рис. 3.4
Другим
полезным способом описания кодового
дерева является решетчатая диаграмма,
изображенная на рис. 3.7. Диаграмма берет
начало из состояния а и на ней
отображаются все возможные переходы
при поступлении на вход очередного
символа. Сплошным линиям соответствуют
переходы, происходящие при поступлении
символа 1 пунктирным – символа 0. При
поступлении на вход двух символов кодер
оказывается в одном из четырех состояний:
a, b,
c или d.
Заметим, что решетчатая диаграмма имеет
повторяющийся характер и может быть
легко построена с помощью диаграммы
состояний.
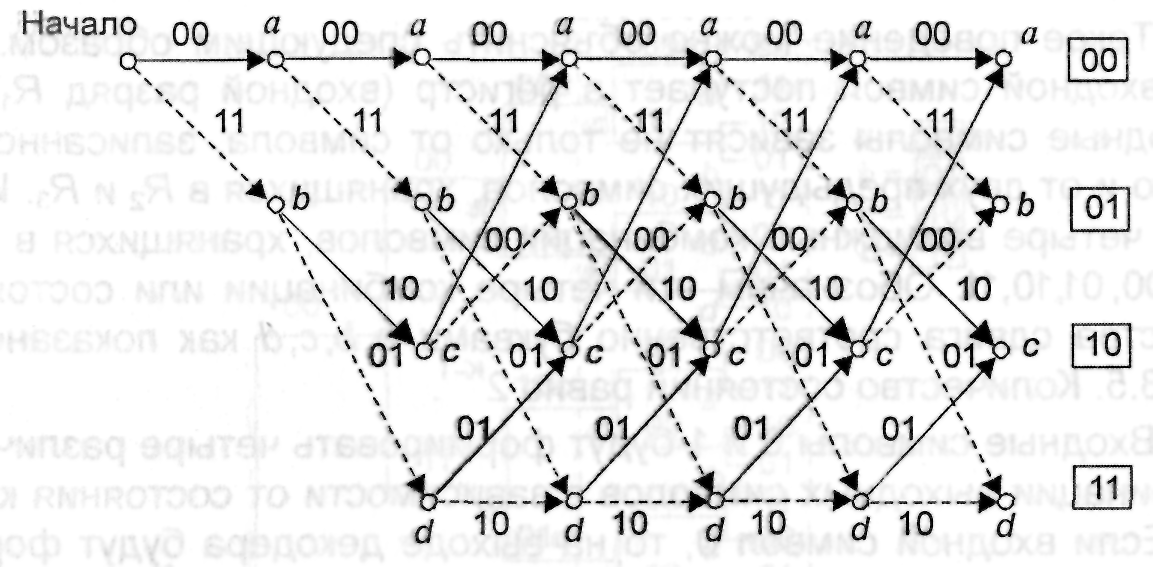
Рис.
3.7. Решетчатая диаграмма для кодера,
изображенного на рис.3.4
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
26.02.2016541.64 Кб17Сертификат Реконструкция жизни.PDF
- #
- #
- #
- #
- #
- #
Что такое BER — Bit Error Rate?
Date:2016/4/5 15:56:57 Hits:
«Коэффициент ошибок по битам, BER используется для количественной оценки канала, несущего данные, путем подсчета частоты ошибок в строке данных. Он используется в телекоммуникациях, сетях и радиосистемах.Коэффициент битовых ошибок, BER — ключевой параметр, который используется при оценке систем, передающих цифровые данные из одного места в другое «. — Fmuser
Системы, для которых коэффициент битовых ошибок, BER применима включают ссылки радио данных, а также информационных систем волоконно-оптические, Ethernet, или любую систему, которая передает данные по сети той или иной форме, где шум, помехи, и дрожание фазы может вызвать ухудшение цифрового сигнал.Хотя есть некоторые различия в том, как эти системы работают и каким образом влияет скорость передачи в битах ошибки, основы скорости битовых ошибок сама по-прежнему то же самое.
Когда данные передаются по каналу передачи данных, существует вероятность ошибок, вводимых в систему. Если ошибки вводятся в данных, то целостность системы может быть поставлена под угрозу. В результате, необходимо оценить производительность системы, и коэффициент ошибок в битах, BER, обеспечивает идеальный способ, в котором это может быть достигнуто.
В отличие от многих других форм оценки, частота ошибок по битам, КОБ оценивает полный впритык производительность системы, включающей передатчик, приемник и среды между ними. Таким образом, частота появления ошибочных битов, КОБ позволяет реальная производительность системы в эксплуатацию, подлежащих испытанию, а не проверки составных частей и в надежде, что они будут работать удовлетворительно, когда на месте.
Бит ошибки скорости определения BER и основы
Как следует из названия, частота ошибочных битов определяется как скорость, при которой возникают ошибки в системе передачи. Это может быть непосредственно переведены в число ошибок, возникающих в строке заявленным количеством битов. Определение частоты появления ошибочных битов может быть переведена в простую формулу:
Если среда между передатчиком и приемником хорошо и соотношение сигнал-шум является высоким, то скорость битовых ошибок будет очень мала — возможно, незначительны и не имеющие какого-либо заметного влияния на общую систему Однако, если шум может быть обнаружен, то есть вероятность того, что частота появления ошибочных битов нужно будет рассмотреть.
Основными причинами деградации канала передачи данных и соответствующей частоты ошибок передачи в битах, BER шум и изменения в пути распространения (где используются сигнальные пути радио). Оба эффекта имеют случайный элемент к ним, шум следующий гауссовой функции вероятности в то время как модель распространения следует модели Рэлея. Это означает, что анализ характеристик канала, как правило, проводится с использованием методов статистического анализа.
Для волоконно-оптических систем, битовых ошибок в основном являются результатом несовершенства используемых компонентов, чтобы сделать ссылку. Они включают в себя оптический драйвер, приемник, разъемы и самого волокна. Ошибки в битах также могут быть введены в результате оптической дисперсии и затухания, которые могут присутствовать. Также шум может быть введен в самом оптическом приемнике. Как правило, они могут быть фотодиоды и усилители, которые должны реагировать на очень маленьких изменений, и в результате может быть высокий уровень шума, который присутствует.
Другим фактором, способствующим для битовых ошибок является любой Дрожание фазы, которые могут присутствовать в системе, так как это может изменить выборку данных Теа.
BER и Eb / No
Отношение сигнал-шум и Eb / No цифры не являются параметрами, которые в большей степени связаны с радиолиний и систем радиосвязи. С точки зрения этого, частота появления ошибочных битов, BER, также может быть определена в терминах вероятности ошибки или POE. Определения этого используются три других переменных. Они являются функция ошибки, ERF, энергия в один бит, ЭБ, и спектральная плотность мощности шума (что мощность шума в полосе частот Гц 1), №
Следует отметить, что каждый тип модуляции имеет свое собственное значение функции ошибки. Это происходит потому, что каждый тип модуляции выполняет по-разному в присутствии шума. В частности, схемы более высокого порядка модуляции (к примеру 64QAM и т.д.), которые способны переносить более высокие скорости передачи данных, не столь надежными в присутствии шума. Меньшие форматы модуляции порядка (например, BPSK, QPSK и т.д.) предлагают более низкие скорости передачи данных, но являются более надежными.
Энергии на бит, ЭБ, может быть определена путем деления мощности несущей на скорости передачи данных и является мерой энергии с размерами джоулей. Нет это мощность на герц, и поэтому это имеет размерность мощности (джоулей в секунду), разделенное на секунды). Не Глядя на размеры отношение Eb / No все размеры компенсируют дать безразмерное отношение. Важно отметить, что РОЕ пропорционально Eb / No и является формой сигнала к шуму.
Факторы, влияющие на частоту появления ошибочных битов BER,
Это можно видеть из использования Eb / No, что частоты появления ошибочных битов, КОБ может зависеть от ряда факторов. Изменяя переменные, которыми можно управлять, можно оптимизировать систему, чтобы обеспечить уровень производительности, которые необходимы. Это, как правило, проводится в стадии проектирования системы передачи данных таким образом, что рабочие параметры могут быть скорректированы на начальных этапах проектирования концепции.
• Помехи: Уровни помех, присутствующих в системе, как правило, установлены под воздействием внешних факторов и не может быть изменен с помощью конструкции системы. Тем не менее, можно установить ширину полосы пропускания системы. За счет снижения пропускной способности уровень помех может быть уменьшено. Однако уменьшение полосы пропускания ограничивает пропускную способность данных, что может быть достигнуто.
• Увеличьте мощность передатчика: Кроме того, можно повысить уровень мощности системы таким образом, чтобы мощность на бит увеличивается. Это должно быть сбалансировано против факторов, включая уровни помех другим пользователям и влияние увеличения выходной мощности от размера усилителя мощности и общее энергопотребление и время автономной работы и т.д.
• Модуляция низшего порядка: схемы модуляции Низшие порядка могут быть использованы, но это за счет скорости передачи данных.
• Уменьшите пропускную способность: Другой подход, который может быть принят, чтобы уменьшить частоту появления ошибочных битов, чтобы уменьшить ширину полосы частот. Более низкие уровни шума будут получены, и, следовательно, соотношение сигнал-шум улучшится. Опять же это приводит к уменьшению пропускной способности данных достижимым.
Необходимо сбалансировать все имеющиеся факторы для достижения удовлетворительной скорости появления ошибочных битов. Обычно это не представляется возможным достичь всех требований и некоторые компромиссы необходимы. Тем не менее, даже с битовой частотой ошибок ниже того, что в идеале требуется, дополнительные компромиссы могут быть сделаны с точки зрения уровней коррекции ошибок, которые вводятся в передаваемые данные. Хотя более избыточные данные должны быть отправлены с более высокими уровнями коррекции ошибок, это может помочь замаскировать последствия любых битовых ошибок, которые возникают, тем самым улучшая общую частоту появления ошибок в битах.
Частота появления ошибочных битов BER является параметром, который дает прекрасную индикацию производительности линии передачи данных, таких как радио или волоконно-оптической системы. В качестве одного из основных параметров, представляющих интерес в любой линии передачи данных является количество ошибок, которые возникают, то коэффициент ошибок в битах является ключевым параметром. Знание BER также позволяет использовать другие особенности ссылки, такие как мощность и пропускную способность, и т.д., чтобы быть адаптированы для того, чтобы требуемые эксплуатационные характеристики, которые будут получены.