С
методической точки зрения погрешности
трехстепенных гироскопов, используемых
в системах ориентации, можно разделить
на геометрические, скоростные,
кинематические и инструментальные.
1.
Геометрические (карданные) погрешности.
Определение
положения летательного аппарата
относительно оси ротора, производится
посредством намерения углов поворота
и .
Направление осей, вокруг которых
отсчитываются углы
и ,
в общем случае не совпадает с направлением
осей отсчета углов, определяющих угловое
положение летательного аппарата
относительно опорной (базовой) системы
координат. Это несовпадение осей является
причиной появления карданных погрешностей.
2.
Скоростные кинематические погрешности.
Скоростные
погрешности возникают вследствие
движения опорной системы координат в
инерциальном пространстве. Например,
если в качестве опорной системы координат
выбран географический трехгранник в
точке старта летательного аппарата, то
скоростные погрешности определяются
угловой скоростью вращения Земли. Для
некорректируемых гироскопов скоростные
погрешности находятся из кинематических
соотношений при необходимости и могут
быть учтены в бортовом вычислительном
устройстве.
3.
Кинематические погрешности.
Кинематические
погрешности возникают вследствие
конического движения измерительных
осей гироскопа в инерциальном пространстве.
Такое коническое движение имеет место
в результате действия инерционных
моментов от рамок карданова подвеса
или моментов сухого трения, которые
возникают вследствие угловых колебаний
летательного аппарата, динамической
несбалансированности ротора гироскопа
или угловых вибраций основания .
4.
Инструментальные погрешности.
Вследствие
несовершенства элементов прибора на
гироскоп действуют возмущающие моменты
трения, моменты от статической
несбалансированности, неравножесткости
конструкции и т. п. Под действием этих
моментов ось ротора прецессирует в
инерциальном пространстве, отклоняясь
от заданного направления, что приводит
к появлению инструментальных
погрешностей при определении углового
положения летательного аппарата. К
инструментальным погрешностям
относятся также погрешности начальной
выставки, погрешности датчиков угла и
т. п.
15.3. Радиокомпас, принцип действия, погрешности
15.3.1. Основные определения
Курсовым
углом радиостанции (КУР)
называется угол, заключенный между
продольной осью самолета и действительным
направлением на радиостанцию. КУР
отсчитывается от продольной оси самолета
по ходу часовой стрелки до направления
на радиостанцию от 0 до 360° (рис.15.5).
Отсчетом
радиокомпаса (ОРК)
называется угол, заключенный между
продольной осью самолета и измеренным
направлением на радиостанцию. ОРК
отсчитывается от продольной оси самолета
до измеренного направления на радиостанцию
от 0 до 360°.
Радиодевиация
∆р —
это угол, заключенный между измеренным
и действительным направлениями на
радиостанцию. Радиодевиация отсчитывается
от измеренного к действительному
направлению на радиостанцию вправо со
знаком плюс (+), а влево со знаком минус(-).
В современных радиокомпасах обеспечивается
компенсация радиодевиации, и поэтому
исправлений измеренной величины отсчета
радиокомпаса производить не требуется.
Пеленгом
радиостанции (ПР)
называется угол между меридианом начала
отсчета курса и направлением от самолета
на радиостанцию. ПР отсчитывается от
северного направления меридиана по
ходу часовой стрелки до направления на
радиостанцию от 0 до 360°.
В
зависимости от начала отсчета курса
самолета пеленги радиостанции могут
быть истинными ИПР и магнитными МПР.
Пеленги
радиостанции рассчитываются по формулам
:
МПР = МК + КУР;
ИПР=ИК+КУР
(15.7)
ИПР
= КК + ∆ К
+ ∆ М
+ КУР.

Рис.15.5.
Основные радионавигационные элементы
Пеленгом
самолета ПС
называется угол между меридианом
радиостанции и направлением от
радиостанции на самолет. ПС отсчитывается
от северного направления меридиана по
ходу часовой стрелки до направления на
самолет от 0 до 360°. В зависимости от
начала отсчета курса самолета пеленги
самолета могут быть истинными ИПС и
магнитными МПС. Пеленги самолета
рассчитываются по формулам:
МПС = МК + КУР ±
180°;
ИПС
= ИК- КУР ± 180°;
(15.8)
ИПС
= КК +∆ К
+ ∆ М
+ КУР ± 180°.
Указанные
формулы для расчета ИПС простой обратной
засечкой могут быть использованы лишь
в том случае, если разность между долготой
радиостанции и долготой самолета
составляет не более 1,5°. При большей
разности долгот ошибка существенно
сказывается на точности определения
линий положения. Поэтому при расчете
ИПС необходимо учитывать поправку на
угол схождения меридианов:
ИПС
= ИК + КУР ± 180″ + (± 8).
(15.9)
Для
карт видоизмененной поликонической
проекции поправка на угол схождения
меридианов будет равна:
![]() (15.10)
(15.10)
где
![]() -долгота
-долгота
радиостанции,![]() —
—
долгота самолета,
![]() —
—
средняя широта листа карты.
Соседние файлы в папке книга посл.редакция
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Основными погрешностями гироскопов являются собственный уход, карданная погрешность, виражная погрешность и кажущийся уход.
- Величина собственного ухода определяется трением и балансировкой движущихся частей гироскопа.
- Карданная погрешность представляет собой разность между углом курса, измеряемым в горизонтальной плоскости, и показаниями гирокомпаса при наклоне (по крену или тангажу) оси наружной рамки от вертикального положения.
- Виражная погрешность появляется при виражах и возникает в связи с работой коррекционного устройства, обеспечивающего перпендикулярность положения ротора гироскопа к плоскости внешней рамки гироузла. В отличие от карданной погрешности виражная погрешность непрерывно накапливается в процессе выполнения виража и не исчезает после его окончания. Для её уменьшения выключают горизонтальную коррекцию гироскопа при виражах.
- Кажущийся уход вызван тем, что свободный трехстепенной гироскоп сохраняет направление своей оси неизменным в пространстве относительно неподвижных звезд, но отнюдь не относительно Земли и ее плоскостей. Земля сама движется в пространстве, поэтому, даже абсолютно неподвижный гироскоп в пространстве вращается относительно Земли, создавая видимое кажущееся движение своей оси. Что бы понять это явление, вспомним маятник Фуко. Качающийся маятник, это своего рода гироскоп. Поэтому, глядя на него мы можем наблюдать (если конечно находимся не на экваторе) вращение Земли вокруг своей оси.
Точность совпадения центра тяжести гироскопической системы с точкой подвеса (сбалансированность), величина силы трения в осях карданного подвеса, вес, диаметр и скорость вращения являются определяющими факторами устойчивости оси гироскопа. При воздействии на карданную систему внешних сил, ось гироскопа перемещается в плоскости, перпендикулярной направлению действия силы. Такое движение гироскопа называется прецессией. Прецессия прекращается с прекращением воздействия на гироскоп.
В авиагоризонтах требуется удерживать гироскоп в вертикальном положении при эволюциях и изменении скорости ЛА. Для уменьшения накапливающихся погрешностей приходится корректировать положение гироскопа механизмами вертикальной коррекции. В качестве датчика вертикали применяются системы маятниковой коррекции, следящие за тем, что бы нижний конец оси гироскопа был направлен к центру Земли. Маятниковые системы подвержены влиянию ускорений, возникающих при маневрировании. Как пример, можно привести явление, называемое «завал авиагоризонта» (индикация, отличных от нуля, значений тангажа или крена в прямолинейном полёте после завершения маневра). Поэтому, на этапах маневрирования, системы коррекции выключаются. Погрешность показаний гироскопа будет зависеть от скорости коррекции, скорости собственного ухода, параметров выключателя коррекции. На первых пневматических авиагоризонтах коррекция не отключалась на вираже. Поэтому скорость коррекции выбиралась очень малой, чтобы уход гироскопа не был значительным за время виража. Соответственно увеличивалось время восстановления вертикали. Позже коррекцию стали выключать в повороте, а на некоторых, и при ускорениях (АГД-1). В настоящее время используются инерциальные гировертикали, в которых точность достигается созданием искусственного маятника «длиной», равной радиусу Земли.
В отличии от авиагоризонтов, где требуется лишь «хранить» вертикаль относительно центра земли, гироскопы курсовых систем должны хранить направление относительно плоскости ортодромии. Поэтому ость гироскопа располагается в горизонтальной плоскости. Для удержания его в этой плоскости применяются механизмы горизонтальной коррекции, по принципу действия аналогичные методам вертикальной коррекции в АГД. Так как гироскоп сохраняет своё положение относительно звёзд (с некоторыми допущениями), а Земля вращается, то, на широте отличной от ноля (экватор), появляется кажущийся уход гироскопа. Угловая скорость вращения Земли равна (360 градусов/24 часа/60мин) 0.25 градусов в минуту. В зависимости от широты, «кажущийся уход» гироскопа составит 0.25sin(φ) градуса в минуту (φ — широта места самолёта). То есть ось гирокомпаса разворачивается вправо, в Северном полушарии, если смотреть сверху. В Южном полушарии «уход» будет в противоположную сторону (значение широты отрицательное). В продолжительных полётах удобнее пользоваться часовой поправкой: 15sin(φ) градусов/час. Компенсацию влияния вертикальной составляющей угловой скорости вращения Земли обеспечивают системы азимутальной (широтной) коррекции. При вводе в систему коррекции значения широты, большей чем фактическая, самолёт, в Северном полушарии, уклонится правее курса, меньшей — левее. Этим можно воспользоваться для одновременной, вместе с широтной, компенсации собственного ухода гироскопа. Для этого вводится условная широта (φ усл), определяемая по НЛ-10М(см.рис.)

Ключ к НЛ-10М для определения условной широты
Скомпенсированный по кажущемуся уходу гироскоп является указателем ортодромии.
См. также
- гироскоп, ГПК
- авиагоризонт,АГД, МГВ
- ГМК, БГМК
Источники
- Е.Л.Николаи «Гироскоп и некоторые его технические применения в общедоступном изложении»,1947 (3.7 Мб формат djvu)
- Браславский Д.А.,ЛогуновС.С.»Приборы на самолете».1947
- Браславский Д.А.,Логунов С.С.»Авиационные приборы».1941
- Ю.Н.Сарайский, И.И.Алешков «Аэронавигация. Часть I. Основы навигации и применение геотехнических средств. 2010 (PDF 9Mb)
- М.И.Лебедев Самолётовождение.ч.II Ставрополь, 2002
| Это незавершённая статья. Вы можете помочь проекту, исправив и дополнив её. |
Ставлю 10/10
Все нравится, очень удобный сайт, помогает в учебе. Кроме этого, можно заработать самому, выставляя готовые учебные материалы на продажу здесь. Рейтинги и отзывы на преподавателей очень помогают сориентироваться в начале нового семестра. Спасибо за такую функцию. Ставлю максимальную оценку.
![]()
Отлично
Лучшая платформа для успешной сдачи сессии
Познакомился со СтудИзбой благодаря своему другу, очень нравится интерфейс, количество доступных файлов, цена, в общем, все прекрасно. Даже сам продаю какие-то свои работы.
![]()
Отлично
Студизба ван лав ❤
Очень офигенный сайт для студентов. Много полезных учебных материалов. Пользуюсь студизбой с октября 2021 года. Серьёзных нареканий нет. Хотелось бы, что бы ввели подписочную модель и сделали материалы дешевле 300 рублей в рамках подписки бесплатными.
![]()
Отлично
Отличный сайт
Лично меня всё устраивает — и покупка, и продажа; и цены, и возможность предпросмотра куска файла, и обилие бесплатных файлов (в подборках по авторам, читай, ВУЗам и факультетам). Есть определённые баги, но всё решаемо, да и администраторы реагируют в течение суток.
![]()
Отлично
Маленький отзыв о большом помощнике!
Студизба спасает в те моменты, когда сроки горят, а работ накопилось достаточно. Довольно удобный сайт с простой навигацией и огромным количеством материалов.
![]()
Хорошо
Студ. Изба как крупнейший сборник работ для студентов
Тут дофига бывает всего полезного. Печально, что бывают предметы по которым даже одного бесплатного решения нет, но это скорее вопрос к студентам. В остальном всё здорово.
![]()
Отлично
Спасательный островок
Если уже не успеваешь разобраться или застрял на каком-то задание поможет тебе быстро и недорого решить твою проблему.
![]()
Отлично
Всё и так отлично
Всё очень удобно. Особенно круто, что есть система бонусов и можно выводить остатки денег. Очень много качественных бесплатных файлов.
![]()
Отлично
Отзыв о системе «Студизба»
Отличная платформа для распространения работ, востребованных студентами. Хорошо налаженная и качественная работа сайта, огромная база заданий и аудитория.
![]()
Хорошо
Отличный помощник
Отличный сайт с кучей полезных файлов, позволяющий найти много методичек / учебников / отзывов о вузах и преподователях.
![]()
Отлично
Отлично помогает студентам в любой момент для решения трудных и незамедлительных задач
Хотелось бы больше конкретной информации о преподавателях. А так в принципе хороший сайт, всегда им пользуюсь и ни разу не было желания прекратить. Хороший сайт для помощи студентам, удобный и приятный интерфейс. Из недостатков можно выделить только отсутствия небольшого количества файлов.
![]()
Отлично
Спасибо за шикарный сайт
Великолепный сайт на котором студент за не большие деньги может найти помощь с дз, проектами курсовыми, лабораторными, а также узнать отзывы на преподавателей и бесплатно скачать пособия.
![]()
Отлично
Инфоурок
›
Технология
›Презентации›Высокоточные системы навигации Лекция №3.1 Анализ уравнений движения трехстепенного гироскопа. Структурная схема.
Скачать материал

Скачать материал
Рабочие листы
к вашим урокам
Скачать
Описание презентации по отдельным слайдам:
-

1 слайд
ВЫСОКОТОЧНЫЕ СИСТЕМЫ НАВИГАЦИИ
Лекция №3.1
Анализ уравнений движения трехстепенного гироскопа. Структурная схема. Передаточные функции. Движение гироскопа под действием постоянных моментов внешних сил. Квазиупругая жесткость.
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ИМЕНИ Н.Э.БАУМАНА -
-
-
-
-
-
-
-
-
-
-
-
-
-














Найдите материал к любому уроку, указав свой предмет (категорию), класс, учебник и тему:
6 364 263 материала в базе
- Выберите категорию:
- Выберите учебник и тему
- Выберите класс:
-
Тип материала:
-
Все материалы
-
Статьи
-
Научные работы
-
Видеоуроки
-
Презентации
-
Конспекты
-
Тесты
-
Рабочие программы
-
Другие методич. материалы
-
Найти материалы
Другие материалы

- 23.12.2020
- 428
- 0
- 20.10.2020
- 514
- 0
- 16.10.2020
- 460
- 0
- 29.09.2020
- 448
- 0
- 26.09.2020
- 519
- 0
- 07.09.2020
- 451
- 0
- 06.08.2020
- 440
- 0
Вам будут интересны эти курсы:
-
Курс повышения квалификации «Методика написания учебной и научно-исследовательской работы в школе (доклад, реферат, эссе, статья) в процессе реализации метапредметных задач ФГОС ОО»
-
Курс повышения квалификации «Технология и организация кухонь народов мира: особенности и традиции»
-
Курс повышения квалификации «Психолого-педагогическое сопровождение при подготовке к конкурсам профмастерства WorldSkills Russia»
-
Курс повышения квалификации «Организация практики студентов в соответствии с требованиями ФГОС технических направлений подготовки»
-
Курс повышения квалификации «Применение MS Word, Excel в финансовых расчетах»
-
Курс повышения квалификации «Этика делового общения»
-
Курс повышения квалификации «Маркетинг в организации как средство привлечения новых клиентов»
-
Курс профессиональной переподготовки «Черчение: теория и методика преподавания в образовательной организации»
-
Курс повышения квалификации «Учебная деятельность по предметной области «Черчение»: основы предмета и реализация обучения в условиях ФГОС»
-
Курс профессиональной переподготовки «Техническая диагностика и контроль технического состояния автотранспортных средств»
-
Курс профессиональной переподготовки «Организация маркетинговой деятельности»
-
Настоящий материал опубликован пользователем Колесникова Юлия Викторовна. Инфоурок является
информационным посредником и предоставляет пользователям возможность размещать на сайте
методические материалы. Всю ответственность за опубликованные материалы, содержащиеся в них
сведения, а также за соблюдение авторских прав несут пользователи, загрузившие материал на сайтЕсли Вы считаете, что материал нарушает авторские права либо по каким-то другим причинам должен быть удален с
сайта, Вы можете оставить жалобу на материал.Удалить материал
-

- На сайте: 2 года и 8 месяцев
- Подписчики: 0
- Всего просмотров: 59362
-
Всего материалов:
224
Сравнение характеристик микромеханических гироскопов
Время на прочтение
9 мин
Количество просмотров 36K
Недавно узнал о том, что фирма STMicroelectronics анонсировала трехосевой гироскоп A3G4250D, удовлетворяющий жесткому стандарту для автомобильного применения (AEC-Q100). Обещана стоимость $6 при заказах от 1000 шт. Класс цены понятен. Захотелось сравнить паспортные характеристики этого датчика с маститыми моделями от Analog Devices Inc. и других производителей. Пока разбирался с даташитами выяснил, что набор паспортных характеристик ADI и STM, к примеру, неодинаковый. Попутно решил выяснить по каким все-таки попугаям стоит сравнивать датчики, т.е. что является наиболее серьезной проблемой микромеханики. В итоге набрался материал для поста, а может и двух. В данном будет вводная. Сравнение a la «[30 коп. пучок] Vs. [Чугунный мост]» к сожалению не уместилось.
Введение
О принципах работы разных классов микромеханических гироскопов и акселерометров можно написать не одну статью. Существует несколько обособленных видов/классов приборов. Если не вдаваться в подробности, грубо можно сказать следующим образом.
Чувствительным элементом (ЧЭ) микромеханического гироскопа является инерционная масса, закрепленная внутри корпуса на пружинах (упругих консолях полупроводника и пр.). Эта чувствительная масса приводится в колебательное движение по одной из осей датчика. Эта ось является осью возбуждения (входной осью). По этой оси задается рабочий режим. Измерения же производятся по перпендикулярной к ней оси (выходной). Принцип действия заключается в том, что при вращении корпуса вокруг его измерительной оси ( ее еще называют осью чувствительности) чувствительный элемент помимо колебаний вдоль входной оси начинает колебаться еще и вдоль третьей, выходной. Если кто знает, что такое Фигуры Лиссажу, тот легко поймет, что ЧЭ начинает описывать в пространстве окружность (или эллипс).
Так упрощенно работает одноосевой датчик. У двух и трехосевых датчиков комплекс из ЧЭ и измерительной системы как бы обрамляется еще одной системой подвеса/измерителей. Т.е. одна сборка ЧЭ/Подвес/Измерители (пусть это будет сборка для оси Х) сама является колеблющимся ЧЭ для другой сборки (напр., по ОY), которая входит в сборку для измерения по OZ. Возможна, наверняка, и раздельная система.
Специалист по микромеханике в тексте выше сможет найти достаточно некорректностей. Написано грубо и для простоты восприятия. И написано это, чтобы плавно перейти к описанию одной из серьезнейших проблем микромеханики, а именно чувствительность к линейным ускорениям.
В теории колеблющийся ЧЭ не должен чувствовать ускорений и не должно у него быть перекрестных связей (в случае двух- или трехосевых датиков) с другими осями чувствительности (ОЧ). Но вследствие неидеальностей создания трехмерной структуры внутри интегральной микросхемы центры масс ЧЭ смещаются, появляются остаточные напряжения в материале, пружины имеют неодинаковые упругости и т.д. В результате ЧЭ для ОХ начинает реагировать на воздействия по OY, линейные ускорения начинают искажать показания гироскопа. Т.е. в измерениях появляется приращение угловой скорости которого на самом деле нет (случайный дрейф).
Сделать производство ЧЭ идеальным невозможно (или не целесообразно), поэтому в конструкции датчиков появляются дополнительные элементы, нужные для уменьшения чувствительности к упомянутым паразитным воздействиям. В первую очередь простотой и даже самим наличием элементов режекции паразитных воздействий как раз и отличаются дешевые (до $10-15) датчики от датчиков среднего ($30-100) и верхнего ($100+) ценовых диапазонов.
В одной из хабрастатей я обсуждал вопрос пренебрежимости реакции недорогих гироскопов на паразитные воздействия (тут например). Понятно, что для статичного квадракоптера незачем изгаляться. Но ведь это лишь демо-устройство будет использоваться в статике. UAV должен перемещаться, причем иметь достойные динамические характеристики. Иначе зачем он сможет быть использованным?
Для поглядеть, а что там за забором?
Про реакцию на вибрации, которые имеют высокую интенсивность в квадракоптерах к примеру, особо рассказывать не нужно. Все знают что это такое. Поэтому считаю, что вопрос чувствительности гироскопов к ускорению и вибрациям очень важен для создания подвижного объекта с нормальной динамикой.
Погрешности микромеханических гироскопов
Первое, что бросается в глаза разработчикам в даташитах к датчикам, это так называемая «стабильность нуля». Ведь кажется, что именно этот параметр в конечном итоге определяет чувствительность датчика, т.е. минимальное входное воздействие, которое датчик почувствует. Так из-за низкой стабильности нуля многих моделей ММГ, до сих пор многие считают, что микромеханические гироскопы (ММГ) не чувствуют вращение Земли. Есть модели ММГ имеющие стабильность нуля немногим более 2 °/час (Земля, как известно вращается со скоростью 15 °/час). Но на практике это не означает, что измерить вращение Земли все-таки удастся.
Как бы то ни было, разработчик смотрит на стабильность нуля. Это понятный параметр, показывающий в каких пределах будет колебаться нуль шкалы датчика в лабораторных условиях. Однако это параметр стабильности «сферического коня в вакууме». В реальности заявленной стабильности не будет. Почему? Да потому, что там указана стабильность (вернее нестабильность) обусловленная внутренними источниками погрешностей. В каких условиях датчик будет работать производитель не сможет предугадать, как и вызванные этими условиями девиации.
Есть два подхода борьбы с погрешностями: аппаратный и алгоритмический (читай программный). Второй подход подразумевает добавление в прошивку БЦЭВМ специальных программных модулей для коррекции ошибок, вызванных паразитными процессами. И этот подход не рекомендуется как оптимальный. В первую очередь сам датчик должен гасить шумы. Центральный мозг должен заниматься не вычищением основного мусора, а финишной обработкой и обсчетом высокоуровневых алгоритмов (навигация, стабилизация, автоматизация). Есть разного рода методические погрешности. Они легко описываются некими формулами, вот их легко компенсировать программно.
К чему все это? А к тому, что правильнее выбрать датчики, оптимальные с точки зрения соотношения цены к точностным характеристикам. И тут главными параметрами выбора будет скорее всего чувствительности гироскопа к линейному ускорению (g-чувствительность) и вибрациям (g²-чувствительность). Почему они главные объясняется ниже.
Температурный гистерезис нуля
ММГ имеют погрешности нуля, которые варьируются в зависимости от температуры внутри корпуса. Для проведения термокомпенсации в ММГ встроены температурные датчики. Их точность особого значения не имеет, важна лишь повторяемость показаний. Но с термокомпенсацией есть проблема — гистерезис. Гистерезис в данном случае — это разница между требуемым значением коррекции для конкретной температуры в двух случаях — когда прибор достигает этой температуры охлаждаясь и в случае, когда он нагревается до той же температуры. См. график ниже.
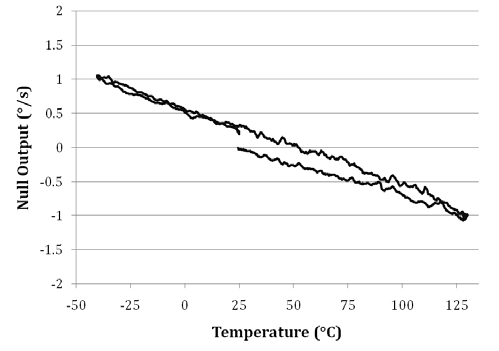
На этом графике показан температурный гистерезис нуля для ММГ ADXRS453 при изменении температуры от +25°С к +130°С, потом к -45°С и обратно к +25°С. Этот гистерезис имеет место не зависимо от того включен датчик во время колебания температуры или нет. К тому же гистерезис зависит от того, насколько широк диапазон изменения температур.
Ситуация сложная? Нет, не очень. В общем случае ММГ не должны использоваться для определения углов ориентации при отсутствии некоторой внешней референсной системы, которая позволяет сбросить накопившуюся погрешность до некоторого низкого уровня. По той же системе можно определить и текущее смещение нуля. Таким образом, температурные смещение нуля и погрешность масштабного коэффициента при нормальном применении достаточно эффективно могут компенсироваться (пусть и с точностью до некоторой малой, ненулевой величины).
Погрешности из-за вибраций
Как было написано выше, сферический ММГ в вакууме измеряет лишь вращение и ничего другого. Однако из-за несимметричности ЧЭ и неидеальности изготовления все ММГ чувствуют ускорения. Под чувствительностью к ускорениям чаще всего понимают чувствительность к линейному ускорению (g-чувствительность) и к линейным вибрациям (g²-чувствительность). На объекты, движущиеся в поле тяготения Земли, в любом случае действует ускорение (кроме случаев свободного падения). Чувствительность к линейным ускорениям часто оказывается главным источником погрешностей.
ММГ в самом низком ценовом диапазоне оптимизированы прежде всего по стоимости, но не по сопротивлению вибрациям. Они имеют относительно простую механическую систему. Она хоть и отличается живучестью (выдерживает гигантские перегрузки в 10’000 g), но не защищена от вибраций. Малая масса чувствительного элемента -> широкая полоса пропускания. В таких гироскопах чувствительность к ускорению (acceleration effect в даташитах) может быть равна 1000 °/час/g (или 0.3 °/сек/g). И это значение вполне себе нормальное для такого класса датчиков. Но это на порядок выше, чем следует ожидать от точных датчиков. От дешевых датчиков не стоит ожидать стабильности нуля в контексте чувствительности к ускорениям. Даже малые вращения в поле тяготения Земли приводят к огромным погрешностям из-за их чрезвычайной чувствительности к ускорению и вибрациям. К слову сказать, «aceleration effect» я не нашел в даташите к A3G4250D от STMicroelectronics. Этот параметр не специфицируется для данного класса датчиков. Он просто подразумевается большим. Ниже представлена сравнительная таблица для некоторых моделей ММГ более высокого класса.

В этой таблице представлены датчики, относящиеся к классу точных. И даже для них оба параметра не всегда указываются производителем.
Часто для компенсации чувствительности к ускорению пользуются коррекцией по показаниям акселерометра. Ниже пример из комментариев к хабрапосту «Использование инерциальной навигационной системы (ИНС) с несколькими датчиками на примере задачи стабилизации высоты квадрокоптера» на тему квадрокоптеров:
Если дрифт постоянный и всегда в одну сторону — это всего лишь говорит о неправильной калибровке 0. В MultiWii 0 гир калибруется при каждом включении, но неидеально (округляется до целого), если ввести хотя бы десятые становится намного лучше. Но в данном применении гироскопа, даже ощутимый дрейф не страшен, так как есть референсная ориентация (компасс и акселерометр) по которой он исправляется.
Но оказывается дрейф из-за чувствительности к ускорениям зависит от частоты с которой это ускорение меняется. Ниже представлены графики зависимости выходного сигнала ММГ CRG20-01 (в штучных поставках в виде demo-board обойдется, если не ошибаюсь, в районе $100-150 с доставкой) от частоты изменения приложенного ускорения.
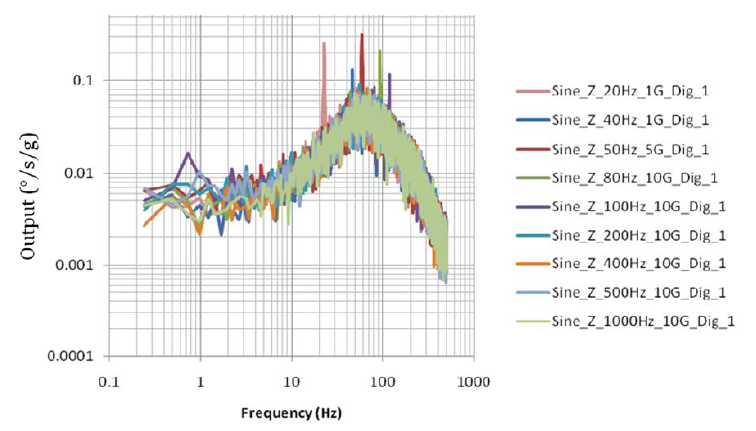
На графике видно, что от амплитуды ускорения погрешность не зависит. А вот от частоты зависимость имеется. И просто так эту погрешность не скомпенсируешь (большая вариация и сложная кривая изменения чувствительности). Скомпенсировать g²-чувствительность, если она постоянна, несложно. Но опять же не все производители в даташитах указывают графики для этого параметра. Разработчику часто приходится самому экспериментально строить эти графики. И часто это производится в полевых условиях на уже запущенных в эксплуатацию приборах.
Еще одна засада с коррекцией по акселерометрам — согласование фаз. В общем случае собственные частоты акселерометра и гироскопа не совпадают, да и частотные характеристики вообще. Поэтому при различных частотах вибраций ММА и ММГ будут выдавать разные смещения по фазе выходного сигнала относительно вибраций на входе. В конечном итоге коррекция по акселерометру может увеличить! погрешность вместо ее гашения. Случится это, если разница между смещениями по фазе ММА и ММГ будет приближаться к значению 3,14 радиан (180 градусов).
В итоге, т.к. чувствительность к вибрациям и ускорениям сильно варьируется даже в рамках одной модели датчика или она слишком велика, производитель ее просто не указывает. Правда нужно заметить, на самом деле достаточно трудно протестировать датчики на чувствительность к вибрациям. Проблемы носят как технический, так и методологический характер.
Для снижения чувствительности к вибрациям можно, конечно крепить датчики через резиновый изолятор. Но сделать так, чтобы этот подвес имел равномерное распределение характеристик для широкого диапазона частот, да еще и не менял их при старении очень сложно.
Ниже представлено сравнение погрешностей из-за чувствительности к ускорению и вибрациям, когда не используется g-компенсация (в гр/сек).

А в следующей таблице представлены погрешности, которые остаются даже после введения g-компенсации (в гр/сек).

Как видим даже при введении g-компенсации погрешность от чувствительности к ускорениям все равно может быть больше погрешности от температурной нестабильности нуля (см. график гистерезиса выше).
Выводы
Написанное выше говорит о том, что не всегда самый очевидный параметр точности является и главным критерием выбора датчиков. «Под свечей всегда темно», — говорит народная мудрость. То, что недостаточно четко описано в даташите или вообще не указано может сыграть решающую роль в успешности проекта. Можно заострить внимание на стабильности нуля и дисперсии шумов, а ведь их можно победить несложными алгоритмами (усреднять во времени или с использованием избыточных измерительных блоков). Зато погрешность от вибраций, как мы увидели выше на примере CRG20-01, может оказаться трудным описать в алгоритме. Долгое время стабильность нуля является золотым стандартом выбора ММГ. Однако на практике большее влияние на точность может оказать чувствительность к ускорениям и вибрациям.
Заключение
Хотел сделать пост, содержащий две части — 1) Обоснование выбора критерия сравнения и 2) Сравнение по ТТХ моделей от Analog Devices Inc., Silicon Sensing, Sensonor и STMicroelectronics. Однако и так получилось «многабукв». Если будет интересно, постараюсь в скором времени сравнить по даташитам датчики упомянутых фирм с разъяснением о физическом смысле основных характеристик.
UPD: поправлены некоторые опечатки и грамматические ошибки.