Управление
– это совокупность действий, направленных
на достижение объектом управления
(сварочный процесс) заданного состояния
(требуемых качества шва, скорости сварки,
глубины проплавления, размеров литого
ядра и т. п.). Формирование управляющего
воздействия и само воздействие на объект
управления осуществляется управляющим
устройством.
Система управления
(СУ) – это
совокупность объекта управления и
управляющего устройства, взаимодействующих
между собой.
Воздействие
управляющего устройства (УУ) на объект
управления осуществляется по каналу
прямой связи, а воздействие объекта
управления на управляющее устройство
– по каналу обратной связи.
X y Прямаясвязь

X
Обратная
связь
x
— управляемая величина,
y
— задающее воздействие.
СУ, в которой
присутствует только прямая связь
называется разомкнутой.




X
Y
Прямая связь

Обратная
связь
СУ, в которой наряду
с прямой связью существует обратная
связь называется замкнутой.
Под обратной
связью в
теории управления понимают передачу
сигнала (информации) с выхода объекта
управления (ОУ) на вход управляющего
устройства (УУ). Обратная связь передаёт
результат изменения выходной величины
на вход системы.
Эта выходная
величина представляет собой реальную
физич. величину (длина дуги, глубина
проплавления, ширина свароч. ванны,
длина и диаметр обратного валика),
подлежащую управлению.
Теория
автоматического управления
– это наука, которая изучает процессы
управления и основы проектирования
автоматич. систем, работающих по
замкнутому циклу в любой области науки
и техники. Иначе говоря, она изучает
процессы управления и задачи создания
любых систем управления с обратной
связью.
Главная обратная
связь – это
связь между выходом и входом системы
управления.
Местная обратная
связь – это
связь между входом и выходом каких-либо
элементов внутри системы управления.
Обобщённая функциональная схема сау
Эта блок-схема
является инвариантной (общей), для всех
систем автоматического управления.

Зу – задающее устройство — формирует сигнал задающего воздействия g(t) пропорциональный заданному значению управляемой величиныx(t).
СС – система
сравнения (схема сравнения),
ИУ – измерительное
устройство,
(T) – сигнал рассогласования (сигнал ошибки),
(t)
= g(t)
– y(t),
где у(t)=
k·x(t),
ε(t)
→ 0 – главная
идея ТАУ.
ОУ – объект
управления,
УПУ –
усилительно-преобразоват. устройство
(регулятор) – решает основную
интеллектуальную функцию СУ.
ИО – исполнительный
орган (привод подачи проволоки):
гидравлический, пневматический, зубчатые,
планетарные передачи. ИО может быть
источник питания.
X1(t)
– сигнал с
выхода регулятора (УПУ),
X2(t)
— управляющее
воздействие ИО на ОУ.
КУ – корректирующее
устройство
Z(t)
– выходной сигнал КУ (местн. обр. связь)
Если задающее
воздействие g(t)
= const,
то это соответствует случаю автоматич.
регулирования, основанному на поддержании
постоянного значения управляемой
величины. Такие системы называются
системами автоматического регулирования
САР.
Лекция №3 Основные элементы сау:
1) ИУ
– чувствительный элемент или датчик,
который измеряет текущие значения
управляемой величины Х
и преобразует их с коэффициентом усиления
k
к сигналу Y
удобному для дальнейшего использования
в системе;
2) ЗУ
– формирует сигнал задающего воздействия
g(t)
в удобном для сравнения с виде;
3) CC
– измеряет сигнал ошибки (t)
пропорциональный отклонению управляемой
величины X(t)
от заданного значения g(t);
4) УПУ
(регулятор)
– усиливает и преобразует в соответствии
с заданным законом управления сигнал
ошибки (t)
необходимый для управления исполнительным
органом ИО;
5) ИО
– преобразует сигнал x1(t)
в управляющее воздействие x2(t),
которое не обязательно может быть
электрич. природы;
6) КУ
(корректирующее устройство) – включаются
последовательно или параллельно ИО.
Назначение КУ: улучшить качество
процессов управления внутри системы с
помощью дополнительного воздействия
z(t).
Классификация
САУ по виду функциональных схем и
принципу действия системы:

Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Лекция 17.
Расчет
установившейся ошибки в системах
управления. Структурные признаки
астатизма. Коэффициенты ошибок
Установившейся
(статической) ошибкой называют постоянное
значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании
переходного процесса:
![]() ,
,
рисунок 116.

Очевидно,
установившаяся ошибка зависит от законов
изменения и численных характеристик
входных сигналов системы. Поэтому при
ее определении принято рассматривать
так называемые типовые входные сигналы,
законы изменения которых составляют
степенной ряд относительно времени.
Например, для задающего воздействия:
![]() ,
,
![]() ,
,
![]()
и так далее.
При наличии
нескольких воздействий на линейную
систему для определения xуст
используется принцип суперпозиции –
реакция линейной системы на совокупность
входных сигналов совпадает с алгебраической
суммой ее реакций на каждый из сигналов
в отдельности:
![]() ,
,
где каждое слагаемое,
или составляющая сигнала ошибки,
![]() определяется
определяется
для i-го
входного сигнала при условии, что
остальные тождественно равны нулю.
Такой подход полностью соответствует
определению передаточной функции и
позволяет выполнять расчет установившейся
ошибки на основе структурной схемы
системы.
Рассмотрим порядок
расчета установившейся ошибки на
следующем достаточно общем примере
(рисунок 117).
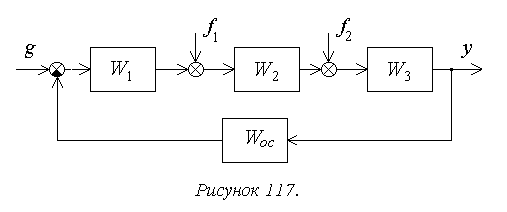
В соответствии с
принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде
суммы трех составляющих
![]() .
.
Изображение по
Лапласу ошибки от задающего воздействия
получают через передаточную функцию
замкнутой системы по ошибке
![]()
при известном изображении задающего
воздействия G(s):
![]() ,
,
где (s)
– основная передаточная функция
замкнутой системы. Для структурной
схемы на рисунке 117
![]() ,
,
где
![]()
— передаточная функция разомкнутой
системы, или прямой цепи системы, для
рассматриваемого примера.
Непосредственно
для расчета установившегося значения
ошибки от задающего воздействия
используют теорему о конечном значении
для преобразования Лапласа:
![]()
В результате:
![]() .
.
Изображение по
Лапласу ошибки от возмущающего воздействия
получают через передаточную функцию
замкнутой системы по ошибке от возмущения
![]()
при известном изображении возмущающего
воздействия F(s):
![]() ,
,
где f(s)
–передаточная функция замкнутой системы
по возмущающему воздействию,
![]() ;
;
Wf(s)
– передаточная функция разомкнутой
системы по возмущению (передаточная
функция участка прямой цепи системы от
точки приложения возмущающего воздействия
до выхода системы).
Для структурной
схемы на рисунке 8 необходимо учитывать
два возмущающих воздействия, приложенные
в различные точки системы.
Для f1:
![]() ,
,
![]() ,
,
 .
.
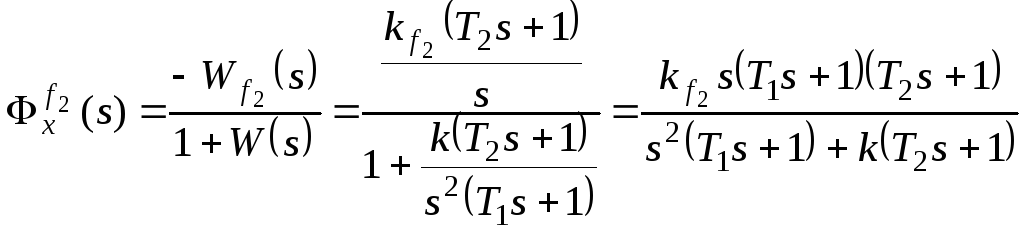
Для f2:
![]() ,
,
![]() ,
,
 .
.
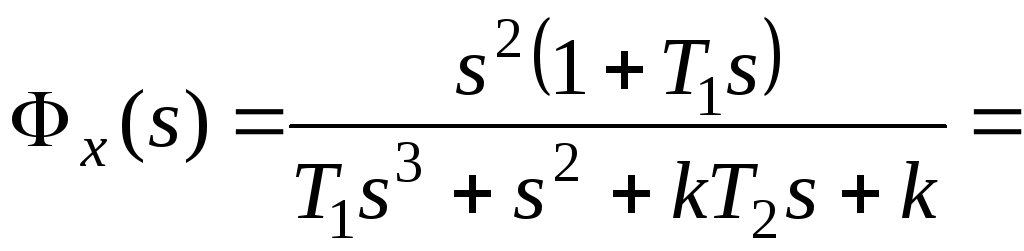
Расчет упрощается
для системы с единичной отрицательной
обратной связью (рисунок 118):

 ,
,
 ,
,
где k=k1k2k3
– коэффициент передачи разомкнутой
системы.
Найдем установившуюся
ошибку для некоторых типовых вариантов
задающего воздействия.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим:
 .
.
Если установившаяся
ошибка тождественно равна нулю при
каком-либо типовом варианте входного
сигнала, независимо от его численных
характеристик, систему называют
астатической по рассматриваемому
входному сигналу.
Количество типовых
вариантов входного сигнала – членов
степенного ряда, при которых установившаяся
ошибка тождественно равна нулю, определяет
порядок астатизма.
Рассматриваемая
система обладает свойством астатизма
второго порядка по задающему воздействию.
Рассмотрим
установившуюся ошибку от возмущения
f1:
![]() ,
,
 ,
,
где
![]()
– коэффициент передачи разомкнутой
системы по возмущению f1.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим тот же результат.
Отметим, что по
возмущению f1
рассматриваемая система не является
астатической. Кроме того, она не в
состоянии отработать два последних
варианта входного сигнала.
Рассмотрим
установившуюся ошибку от возмущения
f2:
![]() ,
,
 ,
,
где
![]()
– коэффициент передачи разомкнутой
системы по возмущению f2.
При
![]()
получим:
![]()
 .
.
При
![]()
получим:
 .
.
При
![]()
получим:
 .
.
По возмущению f2
рассматриваемая система имеет астатизм
первого порядка. Она не в состоянии
отработать возмущающее воздействие,
изменяющееся во времени с постоянным
ускорением.
Подведем некоторые
итоги:
1. Наличие и глубина
свойства астатизма зависят от точки
приложения входного сигнала.
2. Постоянные
времени звеньев системы не влияют на
ее точность.
3. Увеличение
значения коэффициента передачи
разомкнутой системы приводит к снижению
величины установившейся ошибки.
Для систем с
единичной отрицательной обратной связью
существуют достаточно простые структурные
признаки астатизма.
Рассмотрим
структуру, показанную на рисунке 119.

В общем случае
передаточная функция разомкнутой
системы может быть представлена в
следующей форме:
 ,
,
где l0.
Тогда получим:

и для общего вида
задающего воздействия
![]() ,
,
которому соответствует изображение
![]() ,
,
 .
.
Результат нахождения
этого предела зависит от соотношения
показателей степени:
— при l>v
установившаяся ошибка равна нулю
независимо от остальных параметров, то
есть имеет место астатизм;
— при l=v
получаем константу;
— при l<v
установившаяся ошибка стремится к
бесконечности, то есть система не в
состоянии отработать входной сигнал.
Учитывая, что
минимальное значение v
нулевое, получаем условие астатизма по
задающему воздействию: l>0.
Таким образом,
структурный признак астатизма по
задающему воздействию в системе с
единичной отрицательной обратной связью
состоит в наличии нулевых корней в
знаменателе передаточной функции
разомкнутой системы, или интегрирующих
звеньев в прямой цепи системы.
Нетрудно также
убедиться, что положительное значение
l
совпадает с порядком астатизма.
Для получения
признака астатизма по возмущающему
воздействию представим передаточные
функции на рисунке 10 в форме:
 ,
,
 ,
,
где l1+l2=l,
k1k2=k,
m1+m2=m,
n1+n2=n,
причем
![]()
и
![]() .
.
Тогда получим:


и для общего вида
возмущающего воздействия
![]() ,
,
которому соответствует изображение
![]() ,
,
 .
.
Все вышеприведенные
выводы можно повторить для показателя
степени l1.
Таким образом,
структурный признак астатизма по
возмущающему воздействию в системе с
единичной отрицательной обратной связью
состоит в наличии нулевых корней в
знаменателе передаточной функции
участка системы до точки приложения
воздействия, или интегрирующих звеньев
на том же участке.
Более общий подход
к оценке точности линейных систем
управления основан на получении и
использовании коэффициентов ошибок.
Рассмотрим его на примере анализа
реакции системы на задающее воздействие.
Если рассматривать
произвольный закон изменения задающего
воздействия g(t),
то эта функция времени может быть
разложена в степенной ряд относительно
аргумента t.
Члены степенного ряда, как известно,
находятся через производные
![]() ,
,
![]() ,
,
…,
![]() ,
,
…
В общем случае ряд
бесконечен. Поэтому с практической
точки зрения рассматривать такое
представление сигнала целесообразно
только при достаточно плавном его
изменении, когда можно ограничиться
конечным числом членов ряда, имея в
виду, что при n
большем некоторого m
можно принять
![]() ,
,
n>m.
Для задачи оценки
установившейся ошибки при
![]()
с формулированное допущение вполне
корректно, так как в противном случае
эта задача не имеет смысла.
Коэффициенты
ошибки получают разложением передаточной
функции замкнутой системы по ошибке в
степенной ряд (ряд Тейлора) относительно
аргумента s:
![]() ,
,
где коэффициенты
разложения в общем случае находят как
значения производных в точке s=0:
 .
.
Передаточные
функции, представляющие собой отношения
полиномов, при достаточно высоком
порядке системы могут оказаться слишком
сложными для дифференцирования. Поэтому
на практике коэффициенты их разложения
в ряд чаще находят путем деления полиномов
– числителя на знаменатель.
С учетом разложения
передаточной функции в ряд можно записать
изображение по Лапласу сигнала ошибки
в следующей форме:
![]() .
.
Отметим, что с
учетом сформулированного выше допущения
такое представление сигнала ошибки
соответствует
![]()
или
![]() .
.
Перейдя к оригиналу
с учетом теоремы дифференцирования
получим:
![]() .
.
Вернемся к
рассмотренному выше примеру и предположим,
что задающее воздействие изменяется
по произвольному закону, но при достаточно
больших значениях времени этот закон
аппроксимируется выражением
![]() .
.
Найдем коэффициенты
разложения передаточной функции по
ошибке

в степенной ряд.
Здесь сразу можно
отметить, что номер первого ненулевого
члена ряда определяется низшей степенью
аргумента s
в числителе дроби, то есть первые два
коэффициента c0
и c1
здесь получаем тождественно равными
нулю.
Далее получим:





В результате
получаем
![]() ,
,
![]() ,
,
![]() ,
,
![]()
и так далее.
Найдем производные
задающего воздействия:
![]() ,
,
![]() ,
,
![]() .
.
Ясно, что для
определения установившейся ошибки
достаточно первых трех коэффициентов:
![]() .
.
В заключение
отметим, что порядок астатизма системы
по какому-либо входному сигналу совпадает
с количеством нулевых коэффициентов
ошибки, получаемых в разложении в ряд
передаточной функции по ошибке от
данного входного сигнала.
Сигнал — рассогласование
Cтраница 1
Сигнал рассогласования поступает на исполнительный механизм, который управляет мощностью нагрева испарителя, поддерживая заданную частоту капель остатка. Вторичный прибор регистрирует температуру остатка, стекающего с заостренного элемента испарителя. Преобразователь ПТ-ТП-02 преобразует сигнал термо — ЭДС, полученный с термопары, в электрический сигнал.
[1]
Сигнал рассогласования по фазе управляет гидравлическими исполнительными органами.
[2]
Сигнал рассогласования с измерительного элемента подается на вход усилителя. Для уменьшения постоянной времени схемы управления все каскады усилителя выполнены на магнитных усилителях.
[4]
Сигнал рассогласования из СУ в соответствии со структурной схемой передается РДР. Эта передача реализуется за чет того, что корпус и золотник являются одновременно деталями РДР. Для этого в корпусе выполнены соответствующие каналы и расточки для прохода масла, а на золотнике — проточки. Размеры и расположение этих конструктивных элементов строго согласованы между собой.
[5]
Сигнал рассогласования не является точной мерой ошибки, частично вследствие неточности измерителя рассогласования. Эта разность напряжений подается в усилитель. Результирующий сигнал усиливается до мощности, достаточной для возбуждения управляющей обмотки двухфазного двигателя, вторая обмотка которого присоединена к источнику переменного напряжения с постоянным действующим значением, имеющего фазу, смещенную на 90 относительно фазы выходного напряжения усилителя. Вал двигателя зубчатой передачей связан с управляемым валом таким образом, чтобы уменьшалось входное напряжение усилителя. Поэтому, если имеется какое-либо напряжение на входе усилителя, двигатель будет вращаться, пока напряжение не станет нулевым.
[7]
Сигнал рассогласования е выделяется на фазовом дискриминаторе ФД и поступает в исполнительную часть ИМ. Цепь обратной связи ОС содержит индуктивный импульсный датчик и формирующие устройства, разделяющие сигналы датчика по одному из двух каналов, в зависимости от направления движения.
[8]
Сигнал рассогласования ( е) является разностью между задающим входным сигналом и сигналом обратной связи.
[9]
Сигнал рассогласования поступает на вход последовательного корректирующего звена, образованного Т — образным контуром RC. Передаточная функция Т — образного корректирующего контура по отношению к сигналу ошибки ( огибающей несущей частоты системы) с достаточной для практики точностью может быть записана в виде: WK ( р) Кк ( 1 Ткр), где К к — коэффициент передачи; Тк — постоянная времени.
[11]
Сигнал рассогласования после корректирования поступает в модулятор, где преобразуется в напряжение переменного тока с частотой 50 гц, причем амплитуда этого напряжения пропорциональна рассогласованию. Затем это напряжение поступает на фазосдви-гающую пикоформирующую схему, которая управляет четырьмя тиратронами.
[13]
Сигнал рассогласования будет действовать на выходе регулятора до следующего измерения температуры, осуществляемого через интервалы до 2 мин.
[14]
Сигнал рассогласования поступает на демпфирующую ЯС-цепочку и с нее подается на вход высокоомного усилителя.
[15]
Страницы:
1
2
3
4
5
ОБОРУДОВАНИЕ ТЕХНОЛОГИИ РАЗРАБОТКИ
Продолжение разработки проекта контроллера модуля Пельтье, начатой в уроке 36. Узнаем, что такое ПИД регулятор.
Предыдущий урок Список уроков Следующий урок
Основная задача контроллера холодильника – поддержание в камере заданной температуры. Делать это будет регулятор температуры за счет изменения электрической мощности на модуле Пельтье.
В предыдущем уроке мы разработали регулятор мощности. Связь регуляторов мощности и температуры выглядит так.

- Регулятор температуры получает измеренную температуру, сравнивает ее с заданной температурой и вычисляет значение заданной мощности для регулятора мощности.
- Регулятор мощности формирует ШИМ, соответствующий заданной мощности.
Регулятор мощности мы построили по интегральному закону регулирования. Для стабилизации температуры будем использовать более сложный алгоритм управления – пропорционально-интегрально-дифференцирующий (ПИД) регулятор.
ПИД регулятор.
В предыдущем уроке я подробно рассказал об интегральном регуляторе. Подчеркнул его достоинства и недостатки.
Регулятор, работающий по такому принципу, обладает высокой точностью. Остальные критерии качества регулирования – быстродействие и устойчивость — у него не на высоте.
Для того чтобы добиться высоких показателей для всех критериев необходимо использовать регулятор, объединяющий в себе разные законы регулирования.
Именно таким устройством является пропорционально-интегрально-дифференцирующий (ПИД) регулятор. Он формирует выходной сигнал, являющийся суммой трех составляющих с разными передаточными характеристиками. Благодаря этому ПИД регулятор обеспечивает высокое качество регулирования и позволяет оптимизировать управление по отдельным критериям.
В формировании выходного сигнала ПИД регулятора участвуют:
- Пропорциональная составляющая – значение пропорционально ошибке рассогласования (разности заданного и реального значений регулируемого параметра).
- Интегрирующая составляющая – интеграл ошибки рассогласования.
- Дифференцирующая составляющая – производная ошибки рассогласования.
Математическая форма записи закона ПИД регулятора имеет вид:
o(t) = P + I + D = Kp e(t) + Ki ∫e(t)dt + Kd de(t)/dt
- o(t) – выходной сигнал;
- P – пропорциональная составляющая;
- I – интегрирующая составляющая;
- D – дифференцирующая составляющая;
- Kp, Ki, Kd – коэффициенты пропорционального, интегрирующего, дифференцирующего звеньев;
- e(t) – ошибка рассогласования.
В схематичном виде ПИД регулятор можно представить так.

Структурная схема ПИД регулятора напряжения U выглядит так.

- Измеренное напряжение Ureal(t) вычитается из заданного Uset.
- Полученная ошибка рассогласования e(t) поступает на пропорциональное, интегрирующее и дифференцирующее звенья.
- В результате суммы составляющих получается управляющее воздействие o(t), которое подается на регулирующий элемент.
При программной реализации ПИД регулятора вычисления выходного сигнала происходят через равные промежутки времени. Т.е. регулятор является дискретным по времени. Поэтому, далее я буду употреблять выражения: предыдущее состояние сигнала, предыдущее значение и т.п. Речь идет о состоянии системы в предыдущей точке временной дискретизации.
Составляющие ПИД регулятора.
Еще раз. Выходной сигнал ПИД регулятора это сумма трех составляющих:
- пропорциональной;
- интегрирующей;
- дифференцирующей.
Пропорциональная составляющая.
P(t) = Kp * e(t)
Не имеет памяти, т.е. значение выходного сигнала не зависит от предыдущего состояния системы. Просто ошибка рассогласования, умноженная на коэффициент, передается на выход. Выходной сигнал компенсирует отклонение регулируемого параметра. Сигнал тем больше, чем больше ошибка рассогласования. При ошибке равной 0, сигнал на выходе тоже равен 0.
Пропорциональная составляющая не способна компенсировать ошибку полностью. Это видно из формулы. Выходной сигнал в Kp раз больше ошибки. Если ошибка рассогласования равна 0, то и выходной сигнал регулятора равен 0. А тогда и компенсировать нечем.
Поэтому в пропорциональных регуляторах всегда существует так называемая статическая ошибка. Уменьшить ее можно за счет увеличения коэффициента Kp, но это может привести к снижению устойчивости системы и даже к автоколебаниям.
К недостаткам пропорциональных регуляторов следует отнести:
- наличие статической ошибки регулирования;
- невысокая устойчивость при увеличении коэффициента.
Есть весомое преимущество:
- Высокая скорость регулирования. Реакция пропорционального регулятора на ошибку рассогласования ограничена только временем дискретизации системы.
Регуляторы, работающие только по пропорциональному закону, применяют редко.
Главная задача пропорциональной составляющей в ПИД регуляторе – повысить быстродействие.
Интегрирующая составляющая.
I(t) = Ki ∫e(t)dt
Пропорциональна интегралу ошибки рассогласования. С учетом временной дискретности регулятора можно написать так:
I(t) = I(t-1) + Ki * e(t)
- I(t-1) – значение I в предыдущей точке временной дискретизации.
Ошибка рассогласования умножается на коэффициент и прибавляется к предыдущему значению интегрирующего звена. Т.е. выходной сигнал все время накапливается и со временем увеличивает свое воздействие на объект. Таким образом, ошибка рассогласования полностью компенсируется даже при малых значениях ошибки и коэффициента Ki. В установившемся состоянии выходной сигнал регулятора полностью обеспечивается интегрирующей составляющей.
К недостаткам интегрального регулятора следует отнести:
- низкое быстродействие;
- посредственная устойчивость.
Достоинство:
- Способность полностью компенсировать ошибку рассогласования при любом коэффициенте усиления.
На практике часто используют интегрирующие регуляторы (только интегрирующая составляющая) и пропорционально-интегрирующие (интегрирующая и пропорциональная составляющие).
Главная задача интегрирующего звена в ПИД регуляторе – компенсация статической ошибки, обеспечение высокой точности регулирования.
Дифференцирующая составляющая.
D(t) = Kd de(t)/dt
Пропорциональна скорости изменения ошибки рассогласования. Своеобразный показатель ускорения ошибки рассогласования. Дифференцирующая составляющая предсказывает отклонения регулируемого параметра в будущем и противодействует этому отклонению. Как правило, она компенсирует запаздывания воздействия регулятора на объект и повышает устойчивость системы.
С учетом временной дискретности регулятора дифференцирующую составляющую можно вычислить так:
D(t) = Kd * ( e(t) — e(t-1) )
Она показывает, насколько изменилось значение ошибки рассогласования за одну временную единицу дискретности регулятора.
Регуляторов, состоящих из единственного дифференцирующего звена, не бывает.
Главная задача дифференцирующего звена в ПИД регуляторе – повышение устойчивости.
Настройка ПИД регулятора.
Качество регулирования ПИД регуляторов в значительной мере зависит от того, насколько оптимально выбраны коэффициенты. Коэффициенты ПИД регулятора определяются на практике в системе с реальным объектом путем подбора. Существуют разные методики настройки. Я расскажу только об общих принципах.
О качестве регулирования судят по переходной характеристике регулятора. Т.е. по графику изменения регулируемого параметра во времени.
К традиционным пунктам последовательности настройки ПИД регулятора я бы добавил, что, прежде всего, надо определиться какие критерии качества регулирования предпочтительнее.
В предыдущем уроке при разработке регулятора мощности нас в первую очередь интересовали точность и устойчивость. А быстродействие мы даже искусственно снизили. Какие-то регуляторы работают в условиях значительных помех и им важнее устойчивость, от других требуется высокое быстродействие даже в ущерб точности. Критерии оптимизации могут быть разными. В общем случае ПИД регуляторы настраивают для обеспечения всех критериев качества регулирования на высоком уровне.
Составляющие ПИД регулятора настраиваются отдельно.
- Отключается интегрирующее и дифференцирующее звенья и выбирается коэффициент пропорционального звена. Если регулятор пропорционально-интегрирующий (отсутствует дифференцирующее звено), то добиваются полного отсутствия колебаний на переходной характеристике. При настройке регулятора на высокое быстродействие колебания могут остаться. Их попытается скомпенсировать дифференцирующее звено.
- Подключается дифференцирующее звено. Его коэффициентом стремятся убрать колебания параметра регулирования. Если не удается, то уменьшают пропорциональный коэффициент.
- За счет интегрирующего звена убирают остаточную ошибку рассогласования.
Настройка ПИД регулятора носит итерационный характер. Т.е. пункты подбора коэффициентов могут многократно повторяться до тех пор, пока не будет достигнут приемлемый результат.
Благодаря высоким характеристикам и универсальности ПИД регуляторы широко применяются в системах автоматизации производства.
В следующем уроке будем разрабатывать ПИД регулятор температуры.
Предыдущий урок Список уроков Следующий урок
Поддержать проект
1
Автор публикации
не в сети 1 день
Эдуард
206
Комментарии: 1699Публикации: 173Регистрация: 13-12-2015
Преобразователи частоты ABB серии ACS355
Преобразователи частоты ABB серии ACS355 – оптимальный выбор по соотношению «цена-качество» для решения задач с ПИД-регулированием. Общий вид приводов ACS355 показан на рис.4.
Частотные приводы ACS355 обладают широким набором параметров и возможностей. Настроить необходимый режим работы возможно как с панели управления преобразователем, так и при помощи персонального компьютера, посредством специализированного программного обеспечения DriveWindow Light.

Рис.4. Преобразователи частоты ABB серии ACS355 с базовой панелью управления.
В данной статье, для примера, рассмотрен вариант настройки ПИД-регулятора преобразователя ACS355 при помощи панели управления.
Панель управления к частотному приводу ACS355 предлагается в двух вариантах исполнения: базовая панель и интеллектуальная панель управления (см. рис.5).
Рис.5. Варианты панелей управления к преобразователям частоты ABB серии ACS355.
Интеллектуальная панель управления частотным приводом ACS355 имеет встроенный мастер запуска (настройки) и интерактивную справку. С помощью этих инструментов настройку преобразователя частоты ACS355 на режим ПИД-регулирования можно выполнить без особых временных затрат и не пользуясь руководством по эксплуатации.
При использовании базовой панели управления встроенных удобных инструментов, указанных выше, нет.
VII. Измерение входных данных
Я пропускаю этот вопрос, потому как он достоен отдельной большой статьи. О том, как я решал вопрос с термосопротивлением, можно найти в архиве почившего в бозе моего блога.
Главное что нам надо знать, это что мы измеряем данные с нужной нам частотой (в данном случае — 25Гц), и нужной точностью (на выходе — число от 0 до 2048 градусов кельвина через 1/32 градуса). Данные предполагаются уже нормализованные для всех дальнейших расчетов.
Если будет кому интересно — пишите в комментах, распишу в следующий раз как это делается для термопар.
Методика настройки ПИД-регулятора
Выбор алгоритма управления и его настройка является основной задачей в процессе проектирования и последующего удовлетворительного запуска агрегата в промышленную или иную эксплуатацию.
В основе методики лежит закон Циглера-Никольса, являющийся эмпирическим и основанным на использовании данных, полученных экспериментально на реальном объекте.
В результате ознакомления с методикой, а также при близком рассмотрении объектов регулирования, были выбраны формулы и коэффициенты ближе всего подходящие к реальному объекту регулирования.
Объект регулирования – камерная электрическая печь. Число зон регулирования от 24 до 40. Каждая зона есть набор электронагревателей. Материал нагревателей нихром. Тип — проволочные, навитые на керамические трубки.
Требования: поддержание температуры по зонам печи +/- 5С.
МЕТОДИКА:
Настройка пропорциональной компоненты (Xp)
- Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются:
- Постоянная интегрирования устанавливается минимально возможной (Ти =0),
- Постоянная дифференцирования минимально возможной (Тд = 0).

Тο — начальная температура в системе; Тsp — заданная температура (уставка); ∆T — размах колебаний температуры; ∆t — период колебаний температуры.
- Меняем значение пропорциональной составляющей Xp от минимума (0) до момента, пока не появятся устойчивые колебания системы с периодом ∆t.
Система должна находится в постоянном колебательном процессе, притом колебательный процесс незатухающий, где ∆T– характеристика колебания равная значению величины рассогласования (±10С, или как по заданию). Колебания должны быть одинаковы от Тsp.
После получения данной кривой на нашем объекте, засекаем время периода колебаний ʌt – полный период. Данное время есть характеристика системы, оборудования.
3. Используя полученные параметры рассчитываем Ти и Тд.
| Зона пропорциональности | Коэффициент передачи | Постоянная времени интегрирования | Постоянная времени дифференцирования | |
| П-регулятор | 2*PBs | 0.5*Xp | ||
| ПИ-регулятор | 2.2*PBs | 0.45*Xp | 0.83*ʌТ | |
| ПИД-регулятор | 1.67*PBs | 0.6*Xp | 0.5*ʌТ | 0.125*ʌТ |
Цифры в формулах для расчета коэффициентов ПИД-регулирования скорректированы на основе запуска камерной электрической печи в опытно-промышленную эксплуатацию. И конечно в зависимости от типа объекта регулирования могут незначительно меняться.
Сравнение ПИД –регулятора с позиционным регулированием
В системах АСУ ТП наибольшее распространение получили два типа регуляторов – двухпозиционный и ПИД.
Двухпозиционный регулятор наиболее простой в использовании и широко распространенный.
Данный тип регулятора сравнивает значение входной величины с заданным параметром уставки. Если значение измеренной величины ниже заданного значения уставки, регулятор включает исполнительное устройство, при превышении заданного значения, исполнительное устройство выключается. Для предотвращения слишком частого срабатывания устройства, в следствии колебаний системы и следовательно изменении значений, задается минимальный и максимальный порог срабатывания — гистерезис, или по другому зона нечувствительности, мертвая зона, дифференциал. Например, нам необходимо поддерживать температуру в 15°С. Если гистерезис задан 2°, то регулятор будет включать нагрев при 14°С и отключать соответственно при 16°С.
Чем меньше значение гистерезиса, тем точнее будет процесс регулирования, но увеличивается частота срабатывания ,что в конечном итоге приводит к износу коммутационных аппаратов. Увеличение гистерезиса уменьшит частоту переключений, но при этом увеличивается амплитуда колебаний регулируемого параметра, что приведет к ухудшению точности регулирования.
Так или иначе, при таком типе регулирования происходят незатухающие колебания, частота и амплитуда которых зависит от параметров системы. Поэтому данный метод обеспечивает хороший результат в системах, обладающих инерционностью и малым запаздыванием. В частности, такой метод широко применяется при регулировании температуры в нагревательных печах.
В отличии от двухпозиционного с помощью ПИД-регулятора удается свести колебания системы к минимуму, благодаря тому, что при таком методе регулирования учитываются различные значения системы — фактическая величина, заданное значение, разность, скорость. Это позволяет стабилизировать систему и добиться повышения точности в десятки раз по сравнению с двухпозиционным методом. Конечно, здесь многое зависит от правильно подобранных коэффициентов ПИД регулятора.
Для того, чтобы правильно выбрать необходимый тип регулятора необходимо хотя бы приблизительно знать характеристики управляемого объекта , требования к точности регулирования, характер возмущений, воздействующих на объект регулирования.
Задачи ПИД-регулятора в системах АСУ ТП
Основная задача ПИД регулятора состоит в поддержании определенного значения параметра технологического процесса на заданном уровне. То есть говоря простым языком, задача ПИД-регулятора заключается в том, чтобы учитывая полученные значения с датчиков (обратная связь) воздействовать на объект управления, плавно подводя регулируемое значение к заданным уставкам. Применение ПИД регуляторов целесообразно, а зачастую и единственно возможно в процессах, где необходима высокая точность переходных процессов, непрерывный контроль и регулирование заданных параметров, недопустимы значительные колебания в системе.
Объяснение понятия «сигнал рассогласования (ошибки)»
Сигнал рассогласования, также известный как ошибка, является разницей между желаемым и фактическим значением сигнала в системе. Он обычно возникает в процессе передачи, обработки или воспроизведения сигнала и указывает на несоответствие между ожидаемыми и реальными результатами.
Когда сигнал рассогласования возникает в системе, он указывает на проблемы, которые могут снижать эффективность или правильное функционирование системы. Сигнал рассогласования может возникать по разным причинам, таким как шумы, потери сигнала, неправильная калибровка или несоответствие параметров сигнала.
Важно отметить, что сигнал рассогласования может быть положительным или отрицательным. Положительное рассогласование означает, что фактическое значение сигнала больше, чем желаемое, в то время как отрицательное рассогласование означает обратную ситуацию — фактическое значение сигнала меньше, чем желаемое.
Для определения сигнала рассогласования используются различные методы и инструменты. Один из наиболее распространенных инструментов — это сравнение и анализ разности между ожидаемым и фактическим сигналом. Это позволяет определить степень рассогласования и принять соответствующие меры для его устранения.
Сигнал рассогласования является важным показателем для оценки качества сигнала и работоспособности системы. Он позволяет операторам и инженерам идентифицировать проблемные области и принимать меры для их устранения. Без обнаружения и решения рассогласования система не может функционировать эффективно, что может привести к ошибкам или недостаточным результатам.
Итак, сигнал рассогласования — это разница между желаемым и фактическим значением сигнала в системе. Он указывает на несоответствие между ожидаемыми и реальными результатами и используется для определения проблем в системе и принятия мер для их решения. Различные методы и инструменты используются для определения и анализа сигнала рассогласования, и его правильное управление является ключевым аспектом обеспечения надежности и эффективности системы.
- А вам тоже жалко семью с 3 детьми, которую из-за каких-то паршивых 60 млн выкидывают на улицу?
- Чё за рэпер? В клубе был, а то это не знаю.
- Какой доставкой пиццы пользуются в Оренбурге
- Почему 4 ядра процессора не доходят до 100% нагрузки при запуске архивирования
- Стивен Кинг. Творчество его Вам нравится?!
- Вопрос к специалистам
- Будет ли Динияр Билялетдинов играть 12 июня?
- Почему голых парней можно увидеть реже, чем голых девушек?
Управление
– это совокупность действий, направленных
на достижение объектом управления
(сварочный процесс) заданного состояния
(требуемых качества шва, скорости сварки,
глубины проплавления, размеров литого
ядра и т. п.). Формирование управляющего
воздействия и само воздействие на объект
управления осуществляется управляющим
устройством.
Система управления
(СУ) – это
совокупность объекта управления и
управляющего устройства, взаимодействующих
между собой.
Воздействие
управляющего устройства (УУ) на объект
управления осуществляется по каналу
прямой связи, а воздействие объекта
управления на управляющее устройство
– по каналу обратной связи.
X y Прямаясвязь
X
Обратная
связь
x
— управляемая величина,
y
— задающее воздействие.
СУ, в которой
присутствует только прямая связь
называется разомкнутой.
X
Y
Прямая связь
Обратная
связь
СУ, в которой наряду
с прямой связью существует обратная
связь называется замкнутой.
Под обратной
связью в
теории управления понимают передачу
сигнала (информации) с выхода объекта
управления (ОУ) на вход управляющего
устройства (УУ). Обратная связь передаёт
результат изменения выходной величины
на вход системы.
Эта выходная
величина представляет собой реальную
физич. величину (длина дуги, глубина
проплавления, ширина свароч. ванны,
длина и диаметр обратного валика),
подлежащую управлению.
Теория
автоматического управления
– это наука, которая изучает процессы
управления и основы проектирования
автоматич. систем, работающих по
замкнутому циклу в любой области науки
и техники. Иначе говоря, она изучает
процессы управления и задачи создания
любых систем управления с обратной
связью.
Главная обратная
связь – это
связь между выходом и входом системы
управления.
Местная обратная
связь – это
связь между входом и выходом каких-либо
элементов внутри системы управления.
Обобщённая функциональная схема сау
Эта блок-схема
является инвариантной (общей), для всех
систем автоматического управления.
Зу – задающее устройство — формирует сигнал задающего воздействия g(t) пропорциональный заданному значению управляемой величиныx(t).
СС – система
сравнения (схема сравнения),
ИУ – измерительное
устройство,
(T) – сигнал рассогласования (сигнал ошибки),
(t)
= g(t)
– y(t),
где у(t)=
k·x(t),
ε(t)
→ 0 – главная
идея ТАУ.
ОУ – объект
управления,
УПУ –
усилительно-преобразоват. устройство
(регулятор) – решает основную
интеллектуальную функцию СУ.
ИО – исполнительный
орган (привод подачи проволоки):
гидравлический, пневматический, зубчатые,
планетарные передачи. ИО может быть
источник питания.
X1(t)
– сигнал с
выхода регулятора (УПУ),
X2(t)
— управляющее
воздействие ИО на ОУ.
КУ – корректирующее
устройство
Z(t)
– выходной сигнал КУ (местн. обр. связь)
Если задающее
воздействие g(t)
= const,
то это соответствует случаю автоматич.
регулирования, основанному на поддержании
постоянного значения управляемой
величины. Такие системы называются
системами автоматического регулирования
САР.
Лекция №3 Основные элементы сау:
1) ИУ
– чувствительный элемент или датчик,
который измеряет текущие значения
управляемой величины Х
и преобразует их с коэффициентом усиления
k
к сигналу Y
удобному для дальнейшего использования
в системе;
2) ЗУ
– формирует сигнал задающего воздействия
g(t)
в удобном для сравнения с виде;
3) CC
– измеряет сигнал ошибки (t)
пропорциональный отклонению управляемой
величины X(t)
от заданного значения g(t);
4) УПУ
(регулятор)
– усиливает и преобразует в соответствии
с заданным законом управления сигнал
ошибки (t)
необходимый для управления исполнительным
органом ИО;
5) ИО
– преобразует сигнал x1(t)
в управляющее воздействие x2(t),
которое не обязательно может быть
электрич. природы;
6) КУ
(корректирующее устройство) – включаются
последовательно или параллельно ИО.
Назначение КУ: улучшить качество
процессов управления внутри системы с
помощью дополнительного воздействия
z(t).
Классификация
САУ по виду функциональных схем и
принципу действия системы:
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Сигнал рассогласования — это несоответствие между ожидаемыми и фактическими значениями в системе. В любом процессе взаимодействия между компонентами системы могут возникать различные проблемы, которые приводят к сигналу рассогласования. Это может быть проблема в передаче данных, ошибки в программном обеспечении или неправильная настройка оборудования. Важно понимать, что сигнал рассогласования не всегда означает полную остановку системы, но может существенно повлиять на её работу.
Сигнал рассогласования может иметь различные последствия. Прежде всего, он может привести к неправильной работе системы или даже к её полной остановке. Например, если данные, полученные от одного компонента, не совпадают с ожидаемыми данными для другого компонента, то возникает сигнал рассогласования, который может привести к неправильной обработке информации или ошибкам в работе системы в целом.
Кроме того, сигнал рассогласования может привести к утечке конфиденциальной информации или компрометации системы. Если данные уязвимы и доступны в случае сигнала рассогласования, то злоумышленники могут использовать эту уязвимость для получения доступа к системе или для атаки на нее.
Важно обратить внимание на проблемы, связанные с сигналами рассогласования, и принять соответствующие меры для их предотвращения. Необходимо поддерживать систему в актуальном состоянии, устанавливать все необходимые обновления, обеспечивать безопасность данных и регулярно проверять работу системы для выявления возможных сигналов рассогласования.
В заключение, сигнал рассогласования — это несоответствие между ожидаемыми и фактическими значениями в системе. Он может иметь различные последствия, от неправильной работы до утечки конфиденциальной информации. Для предотвращения сигналов рассогласования важно следить за актуализацией системы, обеспечивать безопасность данных и регулярно проверять работу системы на наличие проблем.
Содержание
- Значение сигнала рассогласования в системе и его влияние
- Разъяснение понятия и функции сигнала рассогласования
- Вопрос-ответ
- Что такое сигнал рассогласования?
- Как сигнал рассогласования влияет на работу системы?
- Каким образом можно обнаружить сигнал рассогласования?
- Как можно устранить сигнал рассогласования?
Значение сигнала рассогласования в системе и его влияние
Сигнал рассогласования является одним из важных показателей работы системы. Он представляет собой разницу между желаемым и фактическим значением сигнала. Этот показатель позволяет оценить степень соответствия работы системы её требованиям и задачам.
Сигнал рассогласования может возникать в различных типах систем, таких как автоматические регуляторы, системы управления, системы связи и другие. Он может быть вызван как внешними факторами, такими как помехи, шумы и изменение характеристик окружающей среды, так и внутренними факторами, например, нестабильностью компонентов системы или ошибками в алгоритмах управления.
Влияние сигнала рассогласования на работу системы может быть значительным. Когда значение сигнала рассогласования большое, это может привести к неправильной работе системы, несоответствию выполненных задач и потере точности и эффективности работы. В некоторых случаях большое значение сигнала рассогласования может привести к полной неработоспособности системы.
Для уменьшения сигнала рассогласования и повышения точности работы системы могут применяться различные методы и алгоритмы коррекции. Это может включать использование дополнительных датчиков, фильтров, улучшение алгоритмов управления и другие техники.
Таким образом, сигнал рассогласования является важным показателем работы системы и его значение и влияние необходимо учитывать при проектировании и настройке системы, а также при её эксплуатации и поддержке.
Разъяснение понятия и функции сигнала рассогласования
Сигнал рассогласования – это сообщение, информирующее о нарушении соответствия между фактическим и ожидаемым состоянием объекта или системы.
Функция сигнала рассогласования заключается в обнаружении и регистрации отклонений от требований или нормативов. Это позволяет операторам системы определить, что что-то идет не так и принять необходимые меры для восстановления нормального состояния.
В процессе работы системы сигнал рассогласования может возникать в различных ситуациях:
- При нарушении работы аппаратного обеспечения, например, выход из строя датчика или сбой в работе электрической схемы.
- При ошибке программного обеспечения, вызванной багами, несоответствием требованиям или другими проблемами.
- При отклонении операций от нормы или установленных правил.
Сигнал рассогласования может быть представлен в разных формах – звуковом, световом, текстовом или символическом – в зависимости от типа системы и потребностей операторов. Например, это может быть звуковой сигнал тревоги, мигание индикатора или появление сообщения на экране монитора.
Целью сигнала рассогласования является оперативное привлечение внимания оператора системы к проблеме и предоставление ему информации о характере и месте возникновения рассогласования. Это позволяет пользователю быстро определить причину нарушений и принять меры для их устранения.
Таким образом, сигнал рассогласования играет важную роль в работе системы, предупреждая оператора о проблемах и помогая предпринять действия для их решения. Благодаря этой функции, операторы могут участковый тревоогон, реагировать на отклонения и проводить предупредительные меры для обеспечения нормального функционирования системы.
Вопрос-ответ
Что такое сигнал рассогласования?
Сигнал рассогласования — это разность между желаемым и фактическим сигналом. В контексте системы это означает, что выходной сигнал отличается от того, который должен быть в идеальной ситуации. Это может быть вызвано различными факторами, такими как шумы, искажения или ошибки в обработке сигнала. Сигнал рассогласования может быть представлен как амплитуда, фазовый сдвиг или другие параметры сигнала.
Как сигнал рассогласования влияет на работу системы?
Сигнал рассогласования может негативно повлиять на работу системы, поскольку он может привести к искажению или потере информации в передаваемом или обрабатываемом сигнале. Если сигнал сильно отличается от желаемого, то это может привести к сбоям в работе системы, неправильным вычислениям или ошибкам в передаче данных. Отсутствие контроля и управления сигналом рассогласования может привести к несоответствию требований и результатов работы системы.
Каким образом можно обнаружить сигнал рассогласования?
Обнаружение сигнала рассогласования может осуществляться с помощью различных методов и алгоритмов. Например, можно использовать сравнение желаемого сигнала с фактическим сигналом и вычисление разницы между ними. Также можно применить специальные алгоритмы для анализа частот, амплитуды, фазы и других параметров сигнала. Для направленных систем связи можно использовать методы корреляции или сопоставления сигналов.
Как можно устранить сигнал рассогласования?
Устранение сигнала рассогласования зависит от его причины и контекста системы. В некоторых случаях может потребоваться корректировка параметров системы или обработка сигнала с использованием фильтров или компенсационных алгоритмов. Также может потребоваться проведение регулярной калибровки и настройки системы, чтобы минимизировать сигнал рассогласования. В некоторых случаях может потребоваться замена оборудования или внесение изменений в архитектуру системы.
Главная
»
Самолетостроение
»
Основы теории управления
»
Основные понятия и общие принципы построения автоматических систем. Дать определения и пояснить термины система автоматического управления (САУ), разомкнутые и замнкнутые САУ, сигнал ошибки (рассогласования).
Основные понятия и общие принципы построения автоматических систем. Дать определения и пояснить термины система автоматического управления (САУ), разомкнутые и замнкнутые САУ, сигнал ошибки (рассогласования).
Теория автоматического управления— это дисциплина, изучающая процессы автоматического управления объектами разной физической природы. При этом при помощи математических средств выявляются свойства систем автоматического управления и разрабатываются рекомендации по их проектированию.
Основные понятия:
-Автоматика
-Управление
-Цель
-Объекты:
-Система автоматического управления.
-Устройство
-Объект управления
-Регулирование
-Регулятор
-Задающее воздействие g(t)
-Ошибка регулирования ε(t) = g(t) — y(t),
-Возмущающее воздействие f(t)
САУ- система состоящая из объекта управления и устройства управления, в которой автоматически выполняется заданный процесс.
Разомкнутые САУ
Сущность принципа разомкнутого управления заключается в жестко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в САУ модели управляемого объекта. Примеры таких систем : таймер, блок управления светофора, автоматическая система полива газона, автоматическая стиральная машина и т. п.
В свою очередь различают:
Разомкнутые по задающему воздействию
Разомкнутые по возмущающему воздействию
Замкнутые САУ
В замкнутых системах автоматического регулирования управляющее воздействие формируется в непосредственной зависимости от управляемой величины. Связь входа системы с его выходом называется обратной связью. Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
Сигнал ошибки ε(t) = g(t) — y(t), разность между требуемым значением регулируемой величины и текущим её значением. Если ε(t) отлична от нуля, то этот сигнал поступает на вход регулятора, который формирует такое регулирующее воздействие, чтобы в итоге с течением времени ε(t) = 0.
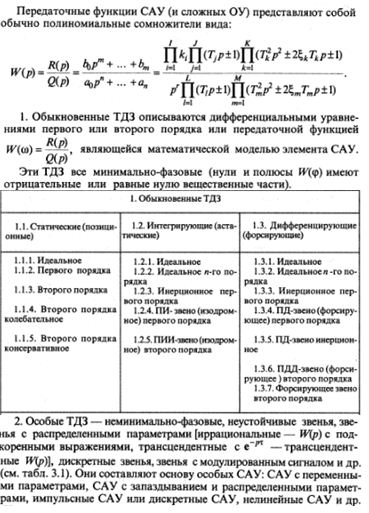
2. Классификация динамических звеньев САУ. Обыкновенные и типовые динамические звенья (ДТЗ) САУ.
Друзья! Приглашаем вас к обсуждению. Если у вас есть своё мнение, напишите нам в комментарии.