ФЕДЕРАЛЬНОЕ
АГЕНТСТВО СВЯЗИ
Ордена
Трудового Красного Знамени федеральное
государственное бюджетное образовательное
учреждение высшего образования
Московский
технический университет связи и
информатики
(МТУСИ)
Кафедра
общей теории связи
Лабораторная
работа № 16
по
дисциплине «Общая теория связи»:
«Обнаружение
импульсных сигналов в шуме»
Вариант
№8
Выполнил:
**********
Проверил(а):
Кудряшова А.Ю.
_________________________
Москва,
2020
1
Цель работы
Изучение
принципа порогового обнаружения двоичных
сигналов, механизма возникновения
ошибок обнаружения, метода анализа и
оптимизации процесса обнаружения.
Экспериментальное исследование
зависимости вероятностей ошибок условий
обнаружения.
Принципиальная
схема установки:

2
Домашнее задание
Исходные
данные:
-
Вариант
№8 -
Напряжение
сигнала,

-
Мощность
шума,
-
Априорная
вероятность сигнала, p(1)
= 0,75


-
Рассчитать
и построить графики зависимости
вероятностей p(1/0)
и p(0/1)
ошибок обнаружения от порога U0
решающего устройства.


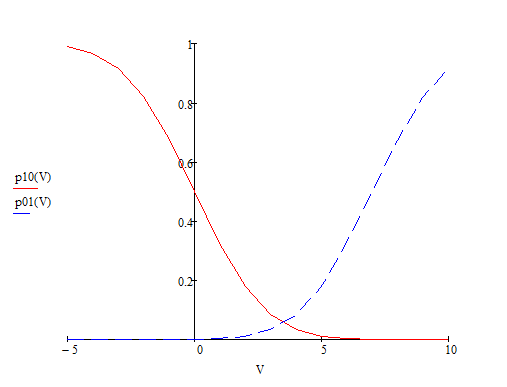
Рис.
1
График зависимости вероятностей ошибок
обнаружения от порога

решающего устройства
-
Рассчитать
и построить на том же графике зависимость
средней вероятности ошибки pОШ
от порога U0
для двух других значений априорной
вероятности сигнала: p(1)=0,5
и p(1)
–0.75 из исходных данных.
Средняя
вероятность ошибки

равна:

где
-
– априорная
вероятность единицы; -
– априорная
вероятность нуля; -
– условная
вероятность нуля при передаче единицы; -
– условная
вероятность единицы при передаче нуля;




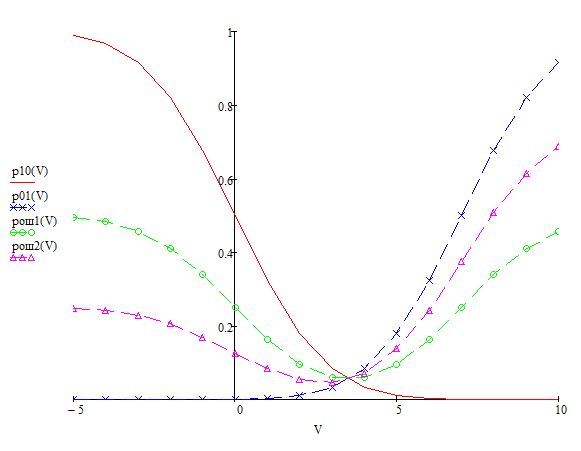
Рис.
2
Зависимость средней вероятности ошибки
от порога
для двух значений априорной вероятности
сигнала

и

-
Для
тех же двух значений априорной вероятности
сигнала p(1)
вычислить оптимальные пороги U0
ОПТ
и соответствующие им значения pОШ
min.
Найденные точки U0
ОПТ
и pОШ
min
отметить на построенных раннее
зависимостях pОШ=
pОШ(U0).









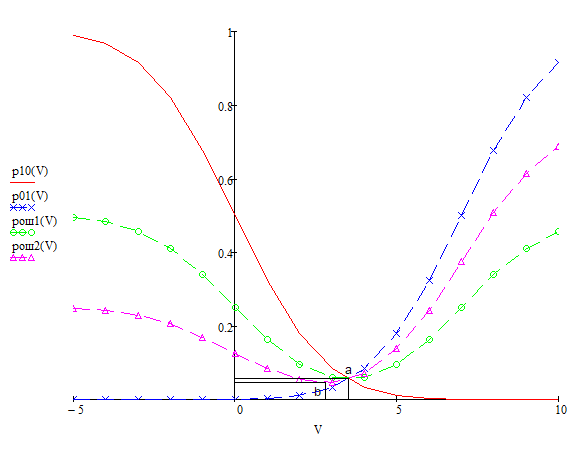
Рис.
3 Зависимости
с указанными значениями
3
Выполнение
Тестирование
-
Вопрос
Ответ:


-
Вопрос
Ответ:

-
Вопрос
Ответ:

-
Вопрос
Ответ:

-
Вопрос
Ответ:

-
Вопрос
Ответ:

-
Вопрос
Ответ:
-
Вопрос
Ответ:

-
Вопрос
Ответ:
-
Вопрос
Ответ:

-
Вопрос
Ответ:

-
Вопрос
Ответ:

-
Вопрос
Ответ:

-
Вопрос
Ответ:

-
Вопрос
Ответ:
-
Вопрос
Ответ:
-
Вопрос
Ответ:
-
Вопрос
Ответ:
4
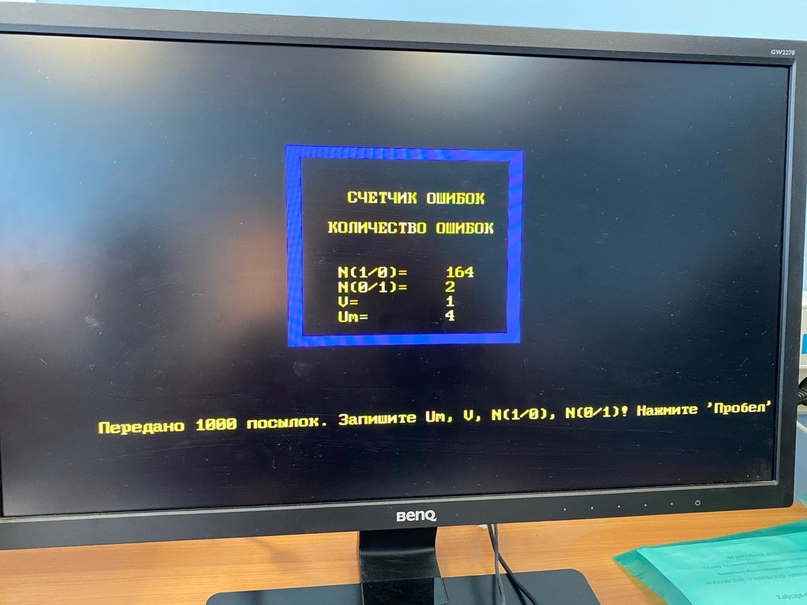
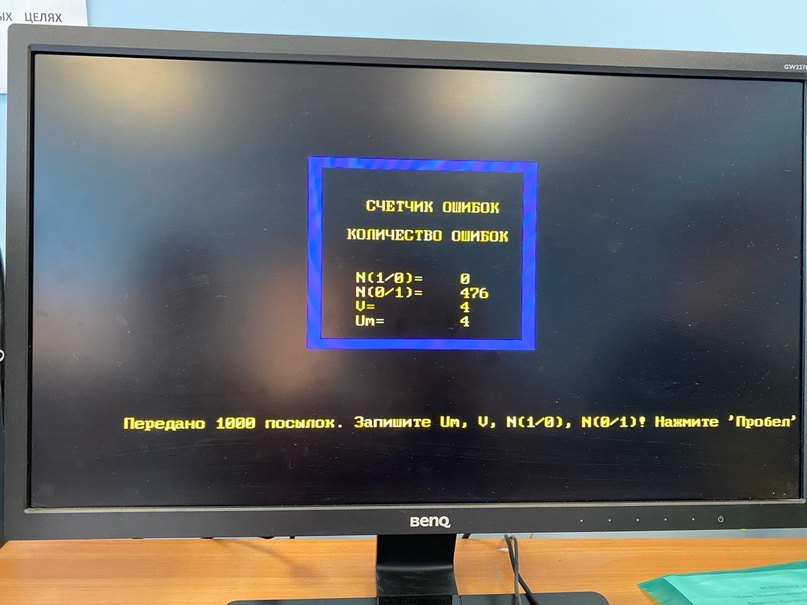
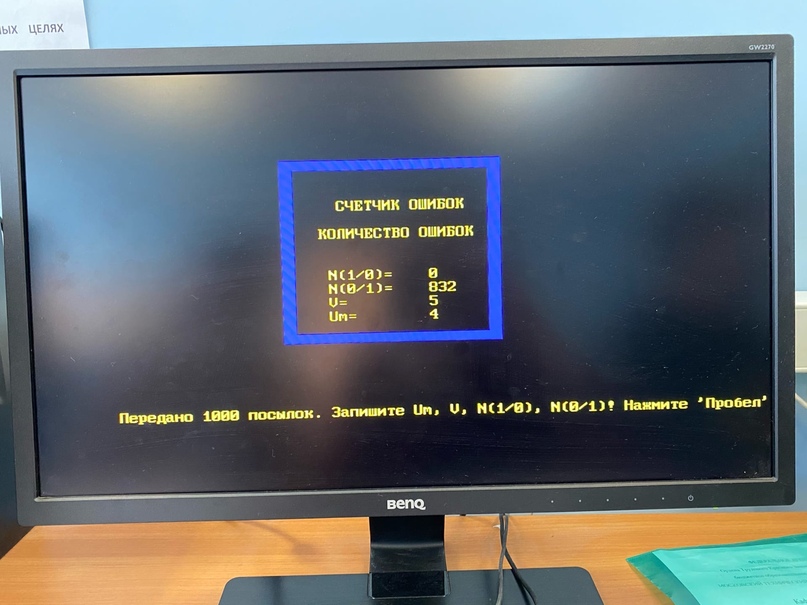
Компьютерный
эксперимент
1)
При
V=-3

2)
При
V=-2.5

3)
При
V=-2

4)
При
V=-1.5
5)
При
V=-1

6)
При
V=-0.5

7)
При
V=0


При
V=0.5

9)
При
V=1
10)
При
V=1.5

11)
При
V=2

12)
При
V=2.5

13)
При
V=3

14)
При
V=3.5

15)
При
V=4
16)
При
V=4.5

17)
При
V=5
18)
При
V=5.5

5
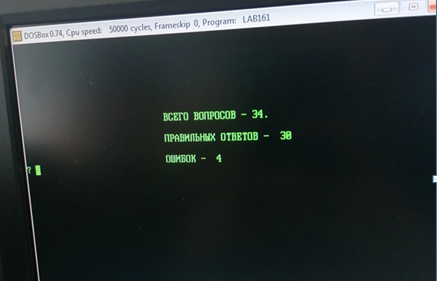
Результаты
тестирования
Соседние файлы в папке Лабы
- #
- #
- #
- #
- #
- #
- #
В
зависимости от того какая, гипотеза будет аксиомой, такой же будет плотность
распределения (отличаются сдвигом на величину амплитуды сигнала(А))
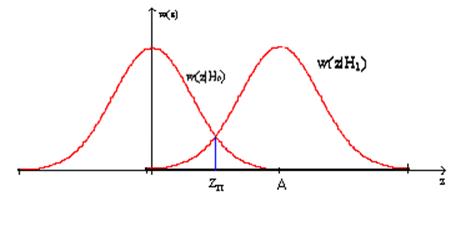
Рис № 6 График распределения
плотности вероятности шумовой реализации при отсутствии сигнала, при наличии
сигнала амплитудой A.
6.
Случаи когерентного и некогерентного приёма Определение оптимального по
критерию идеального наблюдателя порога, условные вероятности ошибок первого и
второго рода, средняя вероятность ошибки, скорость передачи информации при
наличии помех.
6.1.
Когерентный прием.
Когерентный
прием – прием сигнала, параметры которого полностью известны. Выясняем только
наличие сигнала.
Плотности
распределения вероятности (ПРВ):
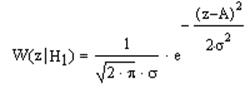
Условная
ПРВ для сигнал+шум W(z êН1):
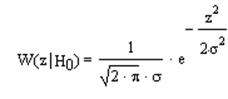
Условная
ПРВ для шума W(z êН0):
Вероятность ошибки
первого рода (ложной тревоги) описывается следующим выражением:
 ,
,
где zп – пороговый
уровень.
В то же время вероятность ошибки
второго рода (пропуск сигнала) описывается формулой:
 .
.
Далее задача состоит в вычислении
оптимального порога zп.
Если
значение будет лежать слева от zп, то приемник будет считать, что
передавался символ 0, если справа, – то 1.
Решением данного
уравнения будет zп, расположенный на пересечении графиков
распределения p0×w(z|H0) и p1×w(z|H1).
Рис.
№7 Графики функций гауссовских плотностей вероятности для мгновенных значений
сигнала z.
Из графика
определяем значение порогового значения zп
zп
= 3,91
В данной работе:
w(z|H0) = 1 / (2·3,14·4,5)1/2·exp[-z2/4,5];
w(z|H1) = 1 /
(2·3,14·4,5)1/2·exp[-(z-8)2/4,5]
Подставляя zп в выражения
для ошибок 1 -го и 2 -го родов получаем:
P01 = 0,047
P10 = 0,039
Средняя
вероятность ошибки: Рош = Р0×
Р01 + Р1×Р10
Рош =
0,452·0,067+0,548·0,027 = 0,021
Скорость
передачи информации:
![]()
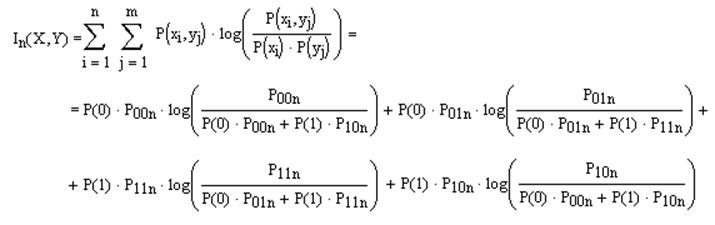
Взаимная
информация:
 ,
,
где
Р00 и Р11 найдем из соотношения:
 ,
,
тогда
Р00 = 1 – Р01 Р00 = 1 – 0,047 = 0,953
Р11 = 1 – Р10 Р11 = 1 – 0,039 = 0,961
Следовательно:
I(X,Y) = 0,452·0,953·1,076+
0,452·0,047·(-3,543) + 0,548·0,961·0,811+0,548·0,047· (-3,535)
I(X,Y)
= 0,724 [бит]
I/(X,Y)
= 0,724/0,5·10-6
Скорость передачи информации в канале с шумами:
I/(X,Y) = 1,44·106
[бит/c]
6.2.
Некогерентный прием.
Некогерентный
прием – прием сигнала, параметры которого известны не полностью.
Плотности
распределения вероятности (ПРВ):
Условная ПРВ для сигнал+шум W(z êН1):
Условная ПРВ для шума W(z êН0):
 ,
,
тогда
Рис. №8 Графики функций рэлеевских
плотностей вероятности для мгновенных значений сигнала z.
Из
графика определяем оптимальный порог: zп = 4,95.
Вероятность
ошибки первого рода:
Вероятность
ошибки второго рода:
 ,
,
тогда
P01n
= 0,066
P10n
= 0,054
Средняя
вероятность ошибки:
Рош = Р(0)·Р01n
+ Р(1)·Р10n
Рош = 0,452·0,066+0,548·0,054
Рош =0,0595
Скорость
передачи информации:
Взаимная
информация:
 ,
,
где
Р00n и Р11n найдем из соотношения:
Р00n
+ Р01n = 1
Р11n + Р10n =
1,
тогда
Р00n
= 1 – Р01n Р00n = 1 – 0,066 =
0,934
Р11n
= 1 – Р10n Р11n = 1 – 0,054 =
0,946,
следовательно
In(X,Y)
= 0,452·0,934·1,048+ 0,452·0,066·(-3,054) + 0,548·0,946·0,787 +0,548·0,054·
(-3,085)
In(X,Y) = 0,668 [бит],
I/n(X,Y)
= 0,668/0,5·10-6
I/n(X,Y) = 1,34·106[бит/с]
Сравнительный результат полученных
данных.
|
Способ приема |
Ошибка первого рода Р01 |
Ошибка второго рода Р10 |
Средняя вероятность ошибки Рош |
Скорость |
|
Когерентный |
0,047 |
0,039 |
0,021 |
1,44 ·106 |
|
Некогерентный |
0,066 |
0,054 |
0,0595 |
1,34·106 |
При
когерентном способе перед приема мы выигрываем по всем параметрам вероятностям ошибок первого и второго рода,
средней вероятности ошибки т.е. помехоустойчивость при когерентном приёме
увеличивается.
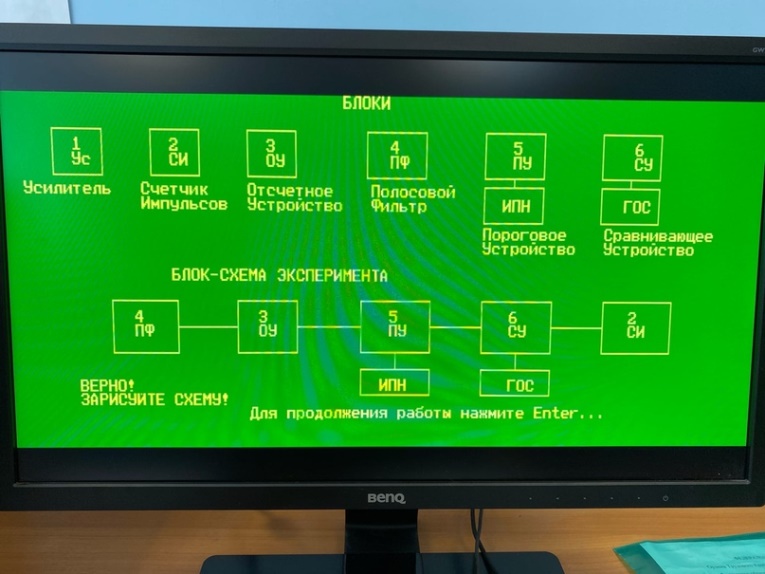
7. Описание принципа
корреляционной обработки и согласованной фильтрации; расчет фильтра.
7.1
Описание
принципа корреляционной обработки и согласованной фильтрации
Для принятия
пороговым устройством решения о пришедших из линии связи сигнале или паузе
нужно вычислить корреляционный интеграл, а затем проверить неравенство:
Применение статистических критериев при решении задач обнаружения в радиотехнике
Время на прочтение
6 мин
Количество просмотров 28K
Аннотация
В статье рассмотрены основы статистической обработки сигналов и методы их оптимальной обработки* на фоне шума.
Оптимальная обработка
*Под оптимальной обработкой в радиолокации понимают такую операцию над входной реализацией**, приводящей к повышению вероятности правильно обнаружения полезного сигнала, как правило, известной формы, при условии наличия во входной реализации шума в виде случайного процесса с известным или неизвестным законом распределения.
**Процесс наблюдаемый на входе приёмника. Строго говоря, назвать его «Входной сигнал» нельзя, так как в теории связи «Шум» и «Сигнал» — антонимы.
Введение
Основной задачей радиотехники является приём, передача и обработка информации с использованием в качестве переносчика – радиосигнала. Главное требование, предъявляемое к радиотехническим системам – получение своевременной и достоверной информации от источника к потребителю. Однако этому мешает физика принципов работы приёмопередающих устройств и среды распространения сигнала, суть которой заключается во флюктуации физических параметров системы и случайным значением принимаемого сигнала, имеющего шумовую составляющую, также относящуюся к стохастическим процессам.
На текущий момент, самый эффективный способ различения полезных сигналов на фоне шумов и помех является оптимальная обработка, реализуемая, как правило, сравнением принимаемой входной реализации с априорно известной формой полезного сигнала. При этом шумы, которые по своей природе процесс слабокоррелированный, вносят меньший вклад в величину, показывающую степень этого сравнения и называющуюся коэффициентом корреляции. Таким образом, любая задача обнаружения сводится к проверке минимум двух гипотез. В общем случае задача обнаружения состоит из двух гипотез: H_0 – сигнал отсутствует на входе приёмного устройства, H_1 – сигнал присутствует на входе приёмного устройства. Различные алгоритмы обнаружения обеспечивают различную вероятность правильного обнаружения P{d_1/H_1} при различных прочих статистических параметрах. Для сравнения эффективности алгоритмов обнаружения существуют критерии, а так как обрабатываются вероятностные величины, то характер этих критериев статистический. Иными словами критерий можно определить как мерило сравнения.
Статистические критерии обнаружения
Большая часть алгоритмов обнаружения радиолокационных целей включают в себя следующие этапы:
- Прием входной реализации
- Формирование порога на основе априорной или апостериорной информации.
- Оптимальная фильтрация входной реализации
- Принятие решения о наличии сигнала/цели
При этом очередность приёма входной реализации и формирования порога зависит непосредственно от типа алгоритма. Алгоритмы, формирующие порог на основе апостериорной информации о принятой входной реализации называют адаптивными [1]. Критерий выбирается эмпирически исходя из типа задачи. Например: при выборе места работы обычно рассматривают два критерия:
- Максимума отношения заработанных денег к затраченной силе.
- Максимума удовольствия, получаемого от работы.
К сожалению, современные реалии ставят в приоритет такого специалиста, навыки которого позволяли бы как можно быстрее выпустить продукцию и максимизировать прибыль компании. И зачастую второй критерий либо отбрасывается, либо при анализе ситуации ему присваивается низкий приоритет. Показатель, в данном случае, определяющий приоритет критериев, называется его мощностью.
В математической статистике мощность критерия определяется, как вероятность не совершить ошибку второго рода при принятии решения. В нашем случае ошибка второго рода — это не устроится на оптимальную для себя работу, в общем же случае это ложное принятие за истину события соответствующего гипотезе H_0.
Разумеется, универсальных критериев не существует. Так, например, критерий, имеющий наибольшую мощность, в решении одной задачи, в решении другой может оказаться наихудшим по этому показателю.
Критерий минимального среднего риска (критерий Байеса)

Рис.1 График распределения условной плотности вероятности наличия W(U|A=1) и отсутствия W(U|A=0) с вероятностями ошибок
Пусть A = 1 соответствует наличию сигнала s(t), а A = 0 – его отсутствию. Множество решений d вырождается в два: d_0 →A=1 and d_1→A=0.
При решении задачи бинарного обнаружения задача эквивалентна проверке гипотезы H_1 о том, что А = 1, при альтернативной гипотезе H_0 о том, что А = 0, а функция потерь переходит в квадратную матрицу:
Таким образом, условный риск при A = 0 равен r_0= C_00 P{d_0/H_0 }+ C_01 P{d_1/H_0 }=C_00 (1-P{d_1/H_0 })+ C_01 P{d_1/H_0 }, а при A = 1 равен r_1= C_10 P{d_0/H_1 }+ C_11 P{d_1/H_1}=C_10 (1-P{d_1/H_1} )+C_11 P{d_1/H_1}, где P{d_1/H_1} – вероятность правильного обнаружения, а P{d_1/H_0 } – вероятность ложной тревоги.
Средний риск определяется как r ̅=qr_0+pr_1, где q – априорная вероятность отсутствия сигнала, а p – априорная вероятность присутствия сигнала и определяет средние потери при ложной тревоге и пропуске цели [2]. Например: при использовании такого критерия для выставления порога срабатывания пожарной сигнализации, стоимость риска при ложной тревоге – вызов пожарной службы, а при пропуске – стоимость вещей в сгоревшей квартире или офисе.
На рис.1 проиллюстрированы графики распределения плотности вероятности при наличии и отсутствии сигнала, также выделены зоны, площадь которых численно равна вероятностям ошибок при принятии решения. Ввиду стохастической природы явлений рассматриваемых в данном примере, распределения имеют ненулевую дисперсию. Согласно критерию минимального среднего риска лучшим алгоритмом обнаружения сигнала будет тот, у которого величина r ̅ будет минимальна [2].
Критерий максимума апостериорной вероятности (максимального правдоподобия)
Этот критерий получается из критерия минимального среднего риска при условии, что потери при совершении ошибки обратно пропорциональны вероятности их совершения C_01=1/P{d_0}, C_10=1/P{d_1}. При этом порог оптимального обнаружителя выставляется таким образом, чтобы минимизировать сумму вероятностей ошибок P_ош=P{d_0/H_1 }+P{d_1/H_0 } (см рис.2).
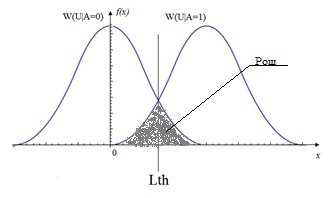
Рис.2 График распределения условной плотности вероятности наличия W(U|A=1) и отсутствия W(U|A=0) с вероятностью ошибки
Двухпороговый критерий Вальда
В случаях, когда большую роль играет время наблюдения за процессом, например при наличии нескольких каналов и одного обнаружителя или круговом обзоре РЛС, применяют критерий последовательной проверки гипотез Вальда также известный под названием двухпороговый.
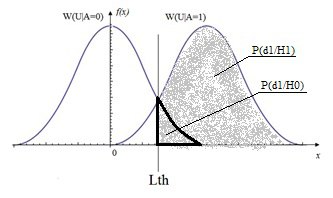
Рис.3 График распределения условной плотности вероятности наличия W(U|A=1) и отсутствия W(U|A=0) с вероятностью правильного обнаружения и вероятностью ложной тревоги
По этому критерию область определения вероятности делится на три подобласти, разделяемыми двумя порогами, определяемыми вероятностями правильного обнаружения и ложной тревоги (см.рис 3): 
Критерий Вальда является оптимальным в смысле минимизации среднего времени наблюдения по большому количеству экспериментов [4]. Так как наиболее предпочтительным для радиолокации является сокращение длительности процедуры обнаружения, современные реалии ведут к всё более активному использованию этого критерия [5].
Критерий Неймана-Пирсона
Большим минусом критериев Байесовского класса является необходимость априорного знания элементов матрицы потерь. Например: при пропуске вражеского бомбардировщика на союзную территорию стоимость рисков не поддается исчислению.
В критерии Неймана-Пирсона фиксируется время обнаружения. Оптимальным будет алгоритм с максимальной вероятностью правильного обнаружения P{d_1/H_1 }, при условии, что вероятность ложной тревоги P{d_1/H_0 } не превышает заданной величины [6].
В виду того, что критерий Неймана-Пирсона не требует знания априорных вероятностей ситуаций A = 1 и A = 0, в радиолокации его используют одним из основных [5].
Заключение
При разработке обнаружителей очень важно осознанно выбирать критерий оптимальности, ведь, как уже упоминалось ранее, каждый критерий имеет максимальную мощность в какой-либо определенной ситуации и применение иных может привести к нежелательным последствиям.
Список использованных источников:
[1] Bulyakulov R.R. The adaptive threshold device // Processing of the 2014 IEEE North West Russia Section Young Researches in Electrical and Electronic Engineering Conference. P.165.
doi: 10.1109/EIConRusNW.2016.7448237
[2] Бакулев, П.А. Радиолокационные системы. Учебник для ВУЗов / П.А. Бакулев; М.: Радиотехника, 2004. – 46 с.
[3] Юревич, Е.И. Теория автоматического управления / Е.И. Юревич; М.: Энергия, 1969
[4] Богатырев, А.А. Стандартизация статистических методов управления качеством / А. А. Богатырев, Ю. Д. Филиппов; М.: Изд-во стандартов, 1989. – 42 с.
[5] Храменков, А.С. Сопоставительный анализ радиолокационных обнаружителей, основанных на критерии неймана-пирсона и последовательном критерии отношения вероятностей /А.С. Храменков, С.Н. Ярмолик // доклады БГУИР №6(76) Минск, 2013.
[6] Васильев, К.К. Методы обработки сигналов: Учебное пособие / К.К. Васильев; Ульяновск, 2001.