
В любой гиперболической системе пара станций позволяет определить только одну изолинию.
А для определения места подвижного объекта (см. рис.1.1) необходимо определить минимум еще одну изолинию. Поэтому, для получения второй изолинии необходимо использовать сигналы еще одной пары станций. В этом случае РНС должна состоять минимум из трех станций – одна из которых будет ведущей, а две остальные – ведомыми. На рис.1.7 показан пример отображения изолиний
Рис1.7. Пример отображения изолиний двух пар цепочек РНС
разностно-дальномерной РНС такого варианта — с ведущей станцией
Аи двумя ведомыми – В и С.
1.5.1.Ошибки, вызванные скоростью распространения радиоволны
Из приведенных выше уравнений (5,6) видно, что важное значение имеет знание реальной скорости распространение радиоволны. Обычно принято считать, что скорость распространения
радиоволны приблизительно равна скорости света, т. е. vp ≈ C .
В свободном пространстве, характеризующееся магнитной и диэлектрической проницаемостью (соответственноμ0 и ε0 ) [1,24],

|
C = |
1 |
= 299792 км |
с |
. |
|
μ0 ε0 |
||||
При распространении радиоволн в атмосфере их скорость отличается от С и зависит от коэффициента преломления n в
атмосфере. Тогда vp = C n . Для нормальных параметров атмосферы
(стандартная атмосфера — давление Р=760 мм, tº=15ºС, упругость паров е=8,8 мм при относительной влажности s =70% ) n =1,000326 [3,24], что приводит к уменьшению скорости распространения
радиоволны в атмосфере до vp = 299695 кмс .
Действительная же скорость распространения радиоволн меняется в широких пределах в зависимости от электрических характеристик среды, в которой происходит распространения радиоволн. Например, на основании большого числа экспериментальных измерений установлено, что при распространении радиоволн над морем средняя скорость составляет 299650 км/с, а над сушей, имеющей меньшую удельную проводимость,- около 299700 км/с [6].
1.5.2. Ошибки, вызванные свойством атмосферой
При анализе условий распространения радиоволны используется деление их на поверхностные волны, распространяющиеся вдоль земной поверхности по кратчайшему расстоянию и пространственные, отраженные от ионосферы.
Для навигационных измерений может использоваться (см. рис.1.8) только поверхностная радиоволна или волна, отраженная от ионосферного слоя Е.
Скорость распространения поверхностных радиоволн (обозначаются символом G – от Ground – земля) зависит не только от состояния атмосферы, но и от характера подстилающей поверхности Земли
Рис.1.8. Распространение поверхностных и пространственных радиоволн

(в данном случае – водной поверхности) на трассе их
|
распространения. |
|
|
Наличие подстилающей поверхности |
обусловливает |
отставание фазового фронта радиоволн по сравнению с распространением в свободном пространстве, что эквивалентно
замедлению фазовой скорости vф колебаний с увеличением
расстояния от излучателя к приемнику и, как следствие этого, — увеличение полного запаздывания τ колебаний, распространяющихся вдоль подстилающей поверхности [1],
τ = D vp + τдоп .
Все это приводит к необходимости использования для каждого района, где находится РНС, своего значения vф .
На практике для расчета сеток изолиний РНП используют некоторое среднее значение фазовой скорости vф.ср. .
Отклонение действительного значения vф от его среднего
(расчетного) значения приводит к возникновению систематических погрешностей, исключаемых специальными поправками, которые помещены в соответствующих Руководствах по использованию РНС.
В настоящее время в современных приемоиндикаторах автоматически рассчитываются поправки, учитывающие влияние подстилающей поверхности, используя данные проводимости подстилающей поверхности, которые хранятся в памяти аппаратуры.
Пространственные волны.
Под влиянием солнечной радиации в верхних слоях атмосферы образуется ионизированная область — ионосфера, представляющая собой разреженную слабоионизированную плазму, в которой непрерывно протекают процессы ионизации и рекомбинации атомов. В ионосфере принято выделять несколько слоев (D, Е, F1, F2), которым соответствуют локальные максимумы электронной концентрации плазмы. Высота слоев ионосферы лежит ,в зависимости от солнечной активности, в следующих пределах: D –
60 — 80 км, E- 90-130 км, F1 — 180 -240 км, F2 -230 — 400 км [2,5,6,17].
Так как основной источник ионизации — излучение Солнца, то структура ионосферы значительно меняется в зависимости от уровня освещенности, времени суток, сезона. Так, в ночных условиях слои D
и F1 исчезают, а электронная концентрация слоев Е и F2 существенно уменьшается, что эквивалентно увеличению их эффективной (отражающей) высоты.
При попадании радиоволн в ионосферу электромагнитная энергия частично рассеивается (поглощается) в ней, и при определенных условиях может наблюдаться процесс отражения радиоволн. Характер и степень отражения зависят oт электронной концентрации отражающего слоя ионосферы, частоты радиоволны f и угла падения радиоволны на нижнюю границу ионосферы.
Пространственные (ионосферные) сигналы S (от Sky – небо, см. рис.1.8) в точке приема будут запаздывать относительно момента прихода поверхностных сигналов, так как проходят большую трассу распространения.
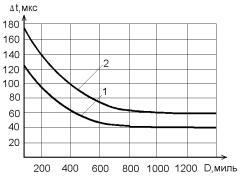
Зависимость времени запаздывания, от времени судок и дистанции судна от передающей станции, приведена на рис.1.9.
Рис.1.9. Задержка пространственной радиоволны относительно поверхностной для частоты 100 кГц (1-день; 2-ночь)
Степень их затухания из-за отсутствия потерь в подстилающей поверхности меньше, чем поверхностных, и поэтому они распространяются на большие дистанции.
Напряженность поля пространственных сигналов определяется электрическими параметрами отражающего слоя ионосферы и зависит от частоты радиоволн. Поэтому влияние пространственных сигналов в радионавигации оценивается применительно к конкретной РНС.
-
Просмотров: 45239
Навигационная безопасность плавания (НБП) – понятие, характеризующее степень исключения навигационных происшествий с кораблем при нахождении его в море.
Навигационная безопасность обеспечивается всем комплексом навигационно-гидрографических, гидрометеорологических мероприятий и деятельностью личного состава штурманской службы кораблей и соединений.
Навигационным происшествием является событие, связанное с посадкой корабля на мель, касанием грунта, столкновением с искусственным или естественным препятствием или с выходом корабля в результате навигационных ошибок за пределы установленной зоны или границы акватории.
Следствием навигационного происшествия является, как правило, повреждение корабля или его технических устройств, снижение маневренных качеств корабля или эффективности выполнения поставленной кораблю задачи. Поэтому навигационная безопасность плавания является одним из элементов, характеризующих боеспособность корабля и его готовность к выполнению поставленной задачи. Навигационное происшествие, обусловленное ошибками кораблевождения и выразившееся в несанкционированном пересечении границы территориальных вод иностранного государства, может осложнить межгосударственные отношения.
Столкновения с наблюдаемыми и ненаблюдаемыми с корабля опасностями происходят по принципиально различным причинам. Поэтому принято разделять навигационные происшествия, связанные со столкновением с наблюдаемым препятствием и со столкновением с ненаблюдаемой и неогражденной буями и вехами навигационной опасностью.
К наблюдаемым с корабля (визуально или с помощью корабельных технических средств наблюдения) навигационным опасностям относятся береговая черта, небольшие острова, морские буровые вышки, корабли и суда, находящиеся в непосредственной близости от данного корабля.
Столкновения с наблюдаемыми объектами являются результатом грубых ошибок в оценке навигационной обстановки или следствием ошибок и промахов в управлении маневрами корабля – в неверном расчете курса, скорости или в несвоевременном выполнении маневра расхождения. Непосредственными причинами таких грубых ошибок являются чаще всего низкая организация взаимодействия главного командного пункта корабля (командира и вахтенного офицера) с вахтенным штурманом и с боевым информационным постом (центром) корабля, а также низкий уровень профессиональной и психологической подготовки специалистов, участвующих в решении задач кораблевождения, – вахтенного штурмана, вахтенного офицера и командира корабля.
К ненаблюдаемым с корабля навигационным опасностям относятся банки, подводные рифы и скалы, отмели, неогражденные кромки фарватеров и морских каналов. В военное время к ненаблюдаемым опасностям относятся также нанесенные на карту минные поля и минные банки.
Посадка корабля на мель или столкновение с ненаблюдаемым, но отмеченным на навигационной карте препятствием чаще всего является или результатом неверного решения навигационных задач (без учета возможных погрешностей в учитываемых месте и элементах движения корабля), или результатом неверного оценивания погрешностей навигационных величин. Из этого следует, что навигационные происшествия, связанные со столкновениями с ненаблюдаемыми препятствиями, обусловлены главным образом штурманскими просчетами – неправильной оценкой площади вероятного местонахождения корабля или несопоставлением этой площади с имеемым запасом чистой воды (с расстоянием до навигационной опасности).
Количественным показателем навигационной безопасности от столкновения с ненаблюдаемыми препятствиями является вероятность свободного прохода кораблем участка маршрута при ожидаемых гидрометеофакторах, основанная на учете случайных погрешностей в определении места корабля и его элементов движения.
Иными словами, навигационная безопасность плавания характеризуется вероятностью отсутствия сбоев в системе навигационного обеспечения кораблевождения, приводящих к навигационному происшествию.
При исправной работе технических средств кораблевождения и при учете их систематических погрешностей в виде поправок вероятность навигационной безопасности плавания зависит от двух главных факторов – от величины случайных погрешностей в последнем обсервованном месте и в элементах движения корабля на интервале от последней обсервации до данного момента времени, а также от кратчайшего расстояния до ближайшей навигационной опасности.
На величину случайных погрешностей в обсервованном месте корабля влияют следующие факторы:
– точность измерения навигационных параметров при выполнении обсервации;
– точностные возможности используемых средств и способов определения места;
– условия измерения навигационных параметров;
– степень соответствия математических основ обработки навигационных параметров характеру их погрешностей и их взаимосвязи;
– уровень квалификации оператора, выполняющего измерения.
На точность элементов движения корабля – линии пути и путевой скорости – влияют погрешности в учете элементов счисления и, главным образом, погрешности учитываемых направления и скорости течения.
Точность счислимого места корабля, исходным пунктом которого является последняя обсервация, обусловлена точностью последней обсервации и точностью счисления.
Таким образом, любое место корабля – счислимое или обсервованное – определяется с теми или иными погрешностями, обусловленными неточностью исходных навигационных величин (элементов счисления или навигационных параметров), по которым оно находилось. Поэтому точка на карте, принимаемая за место корабля, отображает лишь его наиболее вероятное положение на земной поверхности. Действительное место корабля может оказаться смещенным относительно этой точки на величину, пропорциональную погрешностям исходных навигационных величин.
При учете всех поправок исходных навигационных величин погрешность места корабля носит случайный характер, то есть оно может оказаться смещенным в любом направлении и на неопределенную величину. Спрогнозировать точное значение случайной погрешности места невозможно. Поэтому с определенной вероятностью предполагается, что случайные погрешности располагаются в пределах некоторой области (круга или эллипса), называемой областью вероятного местонахождения корабля. Чем точнее способ (средство) обсервации, тем меньше площадь этой области.
Представление места корабля не только точкой, но и областью, в которой может находиться его действительное место, позволяет производить анализ навигационной безопасности корабля: его положение безопасно, если все близлежащие навигационные препятствия расположены на карте вне площади области возможных погрешностей.
Случайные погрешности в месте корабля и вероятность навигационной безопасности плавания находятся в функциональной взаимосвязи, различные виды которой будут раскрыты в последующих разделах. Поэтому для анализа навигационной безопасности плавания необходимо уметь оценивать точность места, то есть вычислять параметры его погрешности, характеризующей область вероятного местонахождения корабля.
Но, помимо этого, степень навигационной безопасности плавания зависит от комплекса факторов, определяющих условия плавания, степень и полноту его навигационно-гидрографического и гидрометеорологического обеспечения.
Этими факторами являются:
– особенности района плавания (узкость, фарватер, прибрежный район, открытое море, шхерный район и т. п.);
– степень насыщенности района плавания средствами навигационного оборудования и плавучими средствами ограждения навигационных опасностей;
– степень океанографической и гидрографической изученности района плавания (надежность, подробность и точность промера глубин, величина и степень изменчивости вектора скорости течения, изменчивость уровня моря и т. п.);
– качество корабельных средств морской навигации и наличие средств для автоматизированного решения навигационных задач;
– уровень профессиональной квалификации и психофизическая устойчивость офицерского состава, участвующего в решении навигационных задач;
– гидрометеорологические условия и качество прогнозирования погоды в районе плавания;
– маневренные качества корабля.
Прогнозирование количественных вероятностных оценок навигационной безопасности плавания производится на основе учета точности плавания и прямого или косвенного учета всех перечисленных факторов, включая размеры и осадку корабля.
Исходным же пунктом оценки навигационной безопасности плавания является расчет возможных навигационных погрешностей и определение области вероятного местонахождения корабля.
1.2. Погрешности навигационных величин и способы их оценки
Решение основных задач кораблевождения связано с измерением различных исходных навигационных величин, к которым относятся навигационные параметры (пеленги, расстояния, высоты светил и т. д.) и элементы счисления (компасный курс, скорость, их поправки, направление и скорость течения, углы дрейфа).
Каждая навигационная величина содержит погрешность, полное значение которой складывается из погрешности измерения и погрешности обработки измеренных величин (погрешности поправок).
Основными причинами погрешностей являются следующие:
– несовершенство измерительного прибора;
– незакономерные и неучитываемые колебания параметров внешней среды, влияющие на результат измерения;
– нестабильность характеристик объекта измерения;
– несовершенство метода измерения;
– несовершенство практических навыков и органов чувств оператора, производящего измерения.
Погрешность навигационной величины равна разности величины U, полученной в результате ее измерения, и истинного ее значения U0.
D = U – U0. (1.2.1)
Погрешность, отнесенную к ее измеренному значению, называют относительной d:
(1.2.2)
За истинное (действительное) значение навигационной величины принимается ее эталонное значение. За эталонное значение принимается такое, точность которого в три или более раза выше точности той величины, погрешность которой определяется.
В зависимости от природы факторов, формирующих погрешность, и от длительности их воздействия, погрешности разделяются на три вида: случайные, систематические и грубые (промахи).
Случайные погрешности – это погрешности, величина и знак которых изменяются случайным образом от измерения к измерению. Они формируются случайными факторами и поэтому спрогнозировать их точное значение невозможно. Случайные погрешности могут быть оценены лишь в вероятностном смысле, то есть можно только определить вероятность, с которой численное значение погрешности находится в тех или иных заданных пределах. Для этого надо знать закон распределения случайных погрешностей.
Случайные погрешности большинства измеряемых навигационных величин формируются под воздействием большого количества различных одинаково значащих случайных факторов и поэтому (на основании центральной предельной теоремы теории вероятностей) подчиняются нормальному закону распределения. Основным параметром этого закона является средняя квадратическая погрешность.
Средняя квадратическая погрешность (СКП) – это показатель точности навигационной величины. Она численно равна корню квадратному из дисперсии (дисперсия – термин теории вероятностей, характеризующий степень рассеивания случайных величин). Точное значение СКП обозначается греческой буквой «сигма» (s), а ее статистическая оценка, определяемая практическим способом и являющаяся приближенным значением СКП, обозначается символом m.
СКП вычисляется по результатам серии n измерений одной и той же навигационной величины. Для этого используется любая из следующих двух формул [9, 12]:
– формула о т к л о н е н и й результатов измерений U от их среднего арифметического значения :
![]() , (1.2.3)
, (1.2.3)
где i – порядковый номер измерения, при этом i = 1, 2, …, n (n ³ 9);
– формула р а з м а х а:
(1.2.4)
где Umax – максимальный результат измерений; Umin – минимальный результат измерений; R – размах измерений, равный Umax – Umin; Kx – коэффициент, определяемый по числу измерений n с помощью табл. 4.5 НМТ.
Зная математическое выражение нормального закона распределения и СКП, можно определить вероятность появления случайной погрешности в любых заданных пределах. Для этого используется таблица интеграла вероятностей (функции Лапласа) для нормального закона распределения. Такая таблица помещена в сборник Мореходных таблиц (табл. 1-б МТ-75 или табл. 4.7 НМТ), а также в приложение 1 данного учебника.
Аргументом для входа в таблицу является нормированная погрешность z – заданная погрешность Dз, выраженная в величинах средней квадратической погрешности:
z = Dз / m.
Пользуясь таблицей функции Лапласа, можно найти вероятность н е в ы х о д а действительной погрешности за любые пределы, в том числе и за пределы + m, + 2m и + 3m. Они соответственно равны: Pm = 0,683, Р2m = 0,954 и P3m = 0,997.
Отсюда видно, что практически все случайные погрешности (в среднем 997 из 1000) заключены в пределах от 0 до ± 3m. Поэтому погрешность D = 3m или D = 3s называется предельной. Вероятность появления случайной погрешности, превышающей предельную, ничтожно мала и составляет всего 0,003.
Навигационные величины, точность которых характеризуется различными СКП, называют неравноточными. Признаками неравноточности является соблюдение хотя бы одного (любого) из следующих условий: измерения выполнены операторами различной квалификации, измерения выполнялись различными приборами (системами), измерения выполнялись в различных условиях, по разному влияющих на точность оцениваемой величины.
Для оценки относительной точности неравноточных величин иногда используется понятие в е с а навигационной величины, который вычисляется по формуле
p = 1 / m2. (1.2.5)
При рассмотрении совокупности навигационных величин в их полных средних квадратических погрешностях mп следует выделять две составляющие – ч а с т н у ю СКП mi каждой i-й навигационной величины и п о в т о р я ю щ у ю с я СКП mо – общую для всех навигационных величин погрешность, то есть
(1.2.6)
Ч а с т н ы е СКП – это средние квадратические погрешности, обусловленные неточностью измерения i-й навигационной величины и неточностью частных поправок (частные поправки – это поправки, численное значение каждой из которых свойственно данной i-й навигационной величине).
П о в т о р я ю щ а я с я СКП – это оценка случайной по происхождению погрешности, которая в неизменном виде (систематически) присутствует в каждой навигационной величине рассматриваемой группы.
При непосредственных измерениях источником повторяющейся погрешности является случайная погрешность общей поправки, которой исправлялись все навигационные величины рассматриваемой группы. Эта случайная погрешность вместе с общей поправкой в неизменном виде входит во все навигационные величины (повторяется) и по своему воздействию на них проявляется как систематическая. Поэтому повторяющуюся погрешность следует рассматривать как случайную погрешность по происхождению, но систематическую (постоянную) по результатам воздействия на данную группу навигационных величин [22, 12].
Повторяющаяся погрешность является причиной корреляционной взаимосвязи навигационных величин. В отличие от функциональной взаимосвязи, корреляционная взаимосвязь проявляется случайным образом и ее закономерность обнаруживается в массе совместных измерений, то есть в среднем.
От степени корреляционной взаимосвязи зависит правило расчета погрешности определяемого места корабля и способ определения вероятнейшего места при появлении фигуры погрешностей (при определении места по трем или более навигационным параметрам).
Степень взаимной корреляции навигационных величин характеризуется коэффициентом взаимной корреляции r, численное значение которого при непосредственных равноточных измерениях (частные СКП mi = m – const) вычисляется по формуле
![]()
![]()
![]() (1.2.7)
(1.2.7)
Из этой формулы следует, что при отсутствии повторяющейся погрешности (mо = 0), то есть при точно известной общей поправки, коэффициент корреляции равен нулю и, следовательно, навигационные величины взаимонезависимы.
Если при наличии повторяющейся погрешности отсутствуют частные погрешности (измерения выполнены практически безошибочно, а частные поправки отсутствуют или точно известны), то коэффициент корреляции равен единице. Навигационные величины в этом случае становятся функционально зависимыми.
При наличии и частных, и повторяющейся погрешностей коэффициент корреляции 0 < r < 1, а навигационные величины при этом являются корреляционно взаимозависимыми.
Обобщенные средние статистические значения частных, повторяющихся и полных средних квадратических погрешностей, а также коэффициентов взаимной корреляции основных навигационных параметров, приведены в табл. 4.3 HМТ и в приложении 2.
Систематические погрешности – это погрешности, остающиеся постоянными или закономерно изменяющимися при производстве серии измерений одной и той же навигационной величины.
Причиной систематических погрешностей является воздействие на результаты всех измерений одного и того же неизменного неслучайного фактора.
Основными источниками систематических погрешностей являются рассогласование нуля шкалы навигационной системы относительно его истинного положения (неточность выверки шкалы прибора по эталону) и несовершенство метода измерения, когда вместо искомой величины измеряется ее часть (с недостатком или с избытком). Например, измеренная секстаном высота светила относительно видимого горизонта содержит систематическую погрешность, равную наклонению видимого горизонта.
Систематические погрешности Dс, как величины неизменные в данных условиях, определяются с помощью эталонных измерений Uэ и учитываются в виде поправки DU.
Поправка — это систематическая погрешность, взятая с обратным знаком:
DU = – Dс = Uо – U » Uэ – U. (1.2.8)
Средняя квадратическая погрешность поправки mDU на основании теоремы о сумме дисперсий вычисляется по формуле
(1.2.9)
где mэ – СКП эталонной величины (определяется по формуляру той системы, с помощью которой оценивается эталонное значение); mU – СКП навигационной величины, измеренной в момент определения поправки.
Если поправка общая для всех измерений данной группы (DU =DUо), то ее средняя квадратическая погрешность является повторяющейся, то есть mDU = mо; если по формуле (1.2.8) определена частная поправка, то есть ее численное значение свойственно только отдельной i-й навигационной величине, то ее средняя квадратическая погрешность является также частной (mDU = mi).
Грубые погрешности (промахи) – это ошибки, вызванные нарушением условий измерения или правил обработки. Наиболее вероятной причиной грубых погрешностей являются невнимательность оператора при измерении или обработке навигационных величин, а также незнание правил измерения (обработки) или отсутствие практических навыков в измерении и обработке.
Грубые погрешности заранее учесть невозможно, но их можно предупредить путем выполнения контрольных измерений и применения дублирующих методов обработки.
Наиболее простым, но приближенным способом выявления грубых ошибок, является способ, основанный на правиле “трех СКП”: если разница данного результата измерения и среднего арифметического значения, вычисленного по результатам всех измерений, больше трех СКП, то данный результат измерения содержит грубую ошибку. Такой результат исключается и в дальнейшей обработке не используется.
1.3. Погрешности места корабля и их вероятностная оценка
Каждому обсервованному навигационному параметру U соответствует своя линия положения (навигационная изолиния), по совокупности которых определяется обсервованное место корабля.
Если в обсервованном навигационном параметре содержится случайная погрешность, характеризуемая средним квадратическим значением mU, то линия положения сместится параллельно самой себе на величину mлп, которая называется средней квадратической погрешностью линии положения. Ее численное значение вычисляется по формуле, являющейся результатом дифференцирования переноса линии положения:
mлп = mU / g, (1.3.1)
где g – г р а д и е н т навигационного параметра – вектор, перпендикулярный линии положения и направленный в сторону увеличения численного значения навигационного параметра.
Модуль градиента определяет величину изменения навигационного параметра при смещении места корабля перпендикулярно линии положения на одну единицу длины, поэтому размерность градиента – единицы навигационного параметра / единицы длины.
Величины (модули) градиентов g и их направления t (относительно северной части географического меридиана) для основных навигационных параметров приведены в табл. 5.47 НМТ. Извлечения из нее даны в табл. 1.3.1.
Т а б л и ц а 1.3.1
|
Вид навигационного параметра |
Градиент g |
Направление градиента t |
Примечания |
|
Пеленг на ориентир |
П – 90о |
D – расстояние до ориентира |
|
|
Расстояние до ориентира |
1 |
П ± 180о |
П – пеленг на ориентир |
|
Высота светила |
1 |
А |
А – азимут светила |
|
Радионавигационный параметр разностно-дальномерных РНС |
q – эквивалент единицы РНП (определяется по книге РТСНО), w – угол между направлениями на наземные станции, А1 и А2 – азимуты наземных станций |
Вид навигационного параметра, указанный в этой таблице, не зависит от того средства, с помощью которого измерен данный навигационный параметр (например, навигационный параметр – пеленг – может быть компасный, радиолокационный, гидроакустический или радиопеленг).
При определении обсервованного места на карте с сеткой навигационных изолиний величина градиента вычисляется по формуле
(1.3.2)
где DU – разность численных значений навигационных изолиний, между которыми находится место корабля; L – расстояние между этими изолиниями в непосредственной близости от места корабля (рис. 1.3.1).
Направление t градиента относительно меридиана соответствует направлению перпендикуляра, восстановленного к навигационной изолинии (вблизи места корабля) и направленного в сторону увеличения численного значения навигационной изолинии.
Если рассматривается несколько линий положения с различными СКП, то их относительная точность характеризуется в е с о м линии положения pлп:
рлп = 1 / m2лп. (1.3.3)
Случайные погрешности линий положения вызывают случайное смещение обсервованной точки, изменяющееся при каждом очередном определении места. Поэтому предсказать конкретную векторную погрешность обсервации невозможно. Можно лишь дать вероятностную оценку точности места – определить площадь, в пределах которой располагается действительное место корабля с той или иной вероятностью. При этом можно использовать площади, ограниченные различными линиями.
В кораблевождении используется площадь объективного (естественного) распределения погрешностей, соответствующих одной и той же вероятности. При нормальном распределении погрешностей измерения такая площадь ограничена эллипсом, который называют э л л и п т и ч е с к о й п о г р е ш н о с т ь ю. Более простой характеристикой погрешности является площадь, ограниченная кругом, называемым р а д и а л ь н о й п о г р е ш н о с т ь ю. Радиус этого круга определенным образом сопряжен с эллипсом погрешностей.
Эллиптическая погрешность
При нормальном распределении случайных погрешностей навигационных параметров случайные погрешности обсервации располагаются в пределах эллипса. Относительно обсервованной точки можно провести бесчисленное множество подобных эллипсов, каждый из которых соответствует определенной вероятности нахождения действительного места в его пределах.
В качестве показателя точности места используется один из этих эллипсов – средний квадратический эллипс погрешностей – СКЭ (рис. 1.3.2). Он характеризуется тремя элементами: большой главной полуосью а, малой главной полуосью b и углом a, под которым большая ось пересекается с меридианом (иногда вместо угла a используется угол j – угол пересечения одной из линий положения с большой главной осью).
Элементы среднего квадратического эллипса погрешностей вычисляются с помощью ЭВМ или по Мореходным таблицам (см. следующий параграф).
Вероятность Р нахождения действительного места корабля в эллипсе с заданными полуосями A = ca и B = cb (с – коэффициент увеличения главных полуосей среднего квадратического эллипса) рассчитывается по формуле
P = 1 – exp (– c2 / 2). (1.3.4)
По этой формуле составлена табл. 4.12 НМТ и таблица приложения 3. Аргументом для входа в таблицу является величина c = =A/а = B/b, то есть для расчета вероятности надо предварительно вычислить главные полуоси среднего квадратического эллипса а и b.
Пользуясь этой формулой или указанными таблицами, можно получить вероятности невыхода действительного места корабля за пределы СКЭ, удвоенного и утроенного СКЭ. Эти вероятности соответственно равны: PСКЭ = 0,393; Р2СКЭ = 0,865; Р3СКЭ = 0,989.
Второе слагаемое формулы (1.3.4) можно определить по таблице 1-а МТ-75, приняв за входной аргумент величину х = с2 / 2.
Эллиптическая погрешность в общем случае вычисляется с помощью ЭВМ и используется при предварительном расчете навигационной безопасности плавания в узкости, по фарватеру и вблизи навигационных опасностей.
Радиальная погрешность
Для оценки точности места в открытом море используется более простая по сравнению с эллипсом величина – радиальная средняя квадратическая погрешность М. Эта условная характеристика точности места представляет собой круг, описанный относительно оцениваемого места радиусом М, равным геометрической сумме главных (a и b) или любых других сопряженных (l1 и l2) полуосей среднего квадратического эллипса (рис. 1.3.3), то есть
(1.3.5)
Напомним, что полуоси или полудиаметры эллипса являются сопряженными, если один из них (например, l1) параллелен касательной кк к эллипсу в точке его пересечения с другой полуосью.
Практические способы расчета радиальной СКП зависят от вида оцениваемого места (обсервованное, счислимое, вероятнейшее, счислимо-обсервованное), от количества навигационных параметров (линий положения) и от степени их взаимной корреляции.
Способы расчета СКП различных мест изложены в последующих параграфах.
Вероятность невыхода действительного места корабля за пределы круга с заданным радиусом R зависит от отношения этого радиуса к радиальной средней квадратической погрешности M и от соотношения главных полуосей среднего квадратического эллипса погрешностей e = b / a. Расчет вероятности производится с помощью табл. 4.13 НМТ или табл. 1-в МТ-75.
Следует обратить внимание на то, что в табл. 1-в МТ-75 радиус заданного круга обозначен не буквой R, как здесь и в НМТ, а символом Мз. Буквой R в МТ-75 обозначен нормированный радиус круга – отношение заданной радиальной погрешности Мз к средней квадратической М. В новых Мореходных таблицах это отношение обозначено символом kP, то есть в НМТ kP = R / M.
При больших отношениях R / M ³ 2 (Мз / М ≥ 2), используемых в реальных расчетах, изменением вероятности при изменении b / a от 0 до 1 во многих случаях навигационной практики можно пренебречь (ошибка в вероятности не превысит 2,8%). При таком подходе расчет вероятности Р может производиться по формуле кругового закона распределения Релея:
P = 1 – exp (– R / M)2. (1.3.6)
По этой формуле составлена табл. 4.15 НМТ и табл. приложения 4 (аргументом этих таблиц является величина kp = R / M). Вероятность радиальной погрешности при а = b можно также определить с помощью табл. 1-в МТ-75 (аргументом таблицы являются величины Мз / М и е = b / a = 1).
Пользуясь формулой (1.3.6) или любой из указанных таблиц, можно получить вероятности невыхода действительного места корабля за пределы круга с любыми заданными радиусами, в том числе и с радиусами M, 2M и 3M. Они соответственно равны: PM = 0,632; P2М = 0,982; P3М = 0,999.
Если требуется решить обратную задачу – вычислить радиус круга R, в пределах которого находится действительное место корабля с заданной вероятностью Р, то сначала по указанным таблицам определяется (обратным входом) коэффициент kр, а затем рассчитывается искомый радиус круга:
R = Mkp. (1.3.7)
Коэффициент kр можно вычислить и без помощи таблиц. Для этого используется формула
![]()
![]() (1.3.8)
(1.3.8)
При использовании таблиц МТ-75 искомый радиус круга ![]() (Мз) вычисляется так: сначала из табл. 1-в (в колонке е = 1) по вероятности Р находится отношение
(Мз) вычисляется так: сначала из табл. 1-в (в колонке е = 1) по вероятности Р находится отношение ![]() / М, а затем, умножив его на радиальную СКП М, получают искомый радиус
/ М, а затем, умножив его на радиальную СКП М, получают искомый радиус
Радиальные погрешности, соответствующие вероятностям, равным или превышающим 0,95, называют п р е д е л ь н ы м и.
Соотношение между линейной (одномерной) и радиальной средними квадратическими погрешностями определяется формулой
m = М / » 0,7M. (1.3.9)
Международная морская организация (ИМО) в 1983 г. установила стандарт точности судовождения, которым является круг, соответствующий вероятности 95%. Радиус такого круга в 1,73 раза больше радиальной СКП места.
В странах Северного Атлантического блока (НАТО) в качестве показателей точности места используется или круговая вероятная погрешность – СЕР (circle error probable) – круг, в пределах которого находится действительное место корабля с вероятностью 50%, или двухмерная средняя квадратическая погрешность – 2 RMS (2 dimension root mean square) – круг, радиус которого равен геометрической сумме главных полуосей среднего квадратического эллипса с главными осями a = b.
1.4. Оценка точности обсервации, полученной по двум навигационным изолиниям (линиям положения)
Расчет элементов среднего квадратического
эллипса погрешностей
При определении места корабля по двум навигационным изолиниям (линиям положения) элементы среднего квадратического эллипса погрешностей можно определить с помощью табл. 4.11 НМТ. Для этого выполняются следующие действия:
– рассчитываются полные СКП линий положения
(1.4.1)
и вычисляется их отношение l = mлп1 / mлп2 £ 1 (в числителе mлп1 – меньшая из двух СКП линий положения);
– рассчитывается угол между градиентами навигационных параметров Dt = ït2 – t1ï (Dt £ 180°). Направления градиентов определяются по формулам, приведенным в табл. 5.47 НМТ или по формулам табл. 1.3.1. При использовании карт с сеткой навигационных изолиний угол Dt определяется по карте с учетом того, что градиенты всегда перпендикулярны навигационным изолиниям и направлены в сторону увеличения численного значения навигационного параметра;
– по формуле (1.2.7) или по табл. 4.3 НМТ (или по приложению 1) определяется коэффициент корреляции r;
– по значениям r, l и Dt из табл. 4.11 НМТ выбираются коэффициенты Ка, Кb и угол j, определяющий направление большой оси эллипса погрешностей. Он откладывается от более точной линии положения (рис. 1.4.1) внутрь угла между линиями положения, равного Dt, если j положительный, и внутрь угла между линиями положения, равного (180° – Dt), если j отрицательный;
Рис.1.4.1
– вычисляются большая и малая главные полуоси среднего квадратического эллипса:
а = mлп1Ка; b = mлп1Кb. (1.4.2)
При взаимонезависимых навигационных параметрах элементы СКЭ могут быть рассчитаны по таблице Приложения 5 МТ-75, в которой приведены значения Ка, Кb и угол j. Аргументами этой таблицы являются величины l = (mлп2 / mлп1) >1 (в числителе mлп2 – большая из двух СКП линий положения) и острый угол пересечения линий положения q. Найденный по таблице угол j, определяющий направление большой оси эллипса погрешностей, откладывается от более точной линии положения внутрь острого угла q, а главные полуоси СКЭ определяются по формуле (1.4.2).
Пример.
Полные СКП линий положения mлп1 = 1,2 мили, mлп2 = 2,0 мили. Коэффициент взаимной корреляции r = 0,4. Направления градиентов t1 = 10°, t2 = 50°. Определить элементы среднего квадратического эллипса погрешностей.
Р е ш е н и е:
– вычисляются отношение l = 1,2/2 = 0,6 и угол между градиентами Dt = =50° – 10° =40°;
– по r = 0,4, l = 0,6 и Dt = 40° из табл. 4.11 НМТ выбираются величины Кa= =2,4, Кb = 1,0 и j = + 1,9°;
– по формуле (1.4.2) рассчитываются главные полуоси СКЭ: a = Каmлп1= =2,4 ´ 1,2 = 2,88 » 2,9 мили, b = Кb mлп1 = 1,0 ´ 1,2 = 1,2 мили.
Угол j положительный, поэтому он откладывается внутрь угла между линиями положения, равного Dt = 40°, от более точной линии положения, направление которой 100° (280о). Следовательно, направление большой оси эллипса относительно меридиана a = 100° + 1,9° = 101,9° (281,9о).
Расчет радиальной средней квадратической погрешности
Радиальная средняя квадратическая погрешность является основным условным показателем точности места при плавании в открытом море. Основой для ее расчета служит формула (1.3.5).
При определении места по двум взаимонезависимым навигационным изолиниям, пересекающимся под углом q, сопряженные полудиаметры среднего квадратического эллипса погрешностей определяются формулами:
l1 = mлп1 / sinq, l2 = mлп2 / sinq. (1.4.3)
Подставив эти выражения в формулу (1.3.5), получим общую формулу радиальной СКП обсервации по двум взаимонезависимым навигационным параметрам любого вида
(1.4.4)
Если учесть, что mлп = mU / g, то эта формула принимает следующий вид:
(1.4.5)
Анализ этой формулы приводит к выводу, что наивыгоднейшим углом пересечения навигационных изолиний является угол q = 90°. Чем меньше этот угол, тем больше погрешность обсервации. Чем точнее измерены навигационные параметры, то есть чем меньше их средние квадратические погрешности, и чем больше градиенты, тем выше точность обсервации. Величину М можно определить по таблице приложения 5.
При однократном измерении каждого навигационного параметра значения mU определяются по табл. 4.3 НМТ или по приложению 2.При многократных измерениях частные погрешности, обусловленные неточностью измерений, вычисляются по результатам измерений, приведенным к одному моменту, способом “размаха” или “отклонений” (см. п.1.2).
Для приведения измерений к моменту последнего измерения результат каждого i-го измерения исправляется поправкой
(ti – ПУ), (1.4.6)
где V – скорость корабля в узлах; ti – интервал приведения в минутах времени; ПУ – направление линии пути корабля.
Пример.
Определили место по гирокомпасному пеленгу и радиолокационному расстоянию. Измерения однократные. Условия измерения благоприятные (j < 60°), Dр= 16,0 миль. Рассчитать радиальную СКП обсервации.
Р е ш е н и е:
– компасный пеленг и радиолокационное расстояние не имеют общей поправки, следовательно, нет и повторяющейся погрешности. Поэтому измеренные навигационные параметры взаимонезависимы;
– измерения однократные, поэтому их полные СКП определяют по табл. 4.3 НМТ или по таблице приложения 2: mП = 0,5о, mD = 0,004D = 0,064 мили;
– градиент пеленга (см. табл. 1.3.1) gП = 57,3 / D = 3,58°/мили, градиент расстояния gD = 1;
– угол пересечения изолиний пеленга и расстояния q = 90°;
– по формуле (1.4.5) получаем М @ 0,15 мили = 1,5 каб.
Такой же результат получается при использовании приложения 5.
Если навигационные параметры взаимозависимы, то радиальная СКП обсервации рассчитывается по более сложной формуле
(1.4.7)
где Dt – угол между градиентами навигационных изолиний; mлп1 и mлп2 – полные СКП навигационных изолиний (линий положения), вычисляемые по формуле (1.4.1); r – коэффициент взаимной корреляции навигационных параметров [см. формулу (1.2.7)].
Наивыгоднейшим является острый угол между градиентами (Dt), близкий к 90°. В этом случае третье слагаемое под знаком корня останется со знаком “минус” и, следовательно, оно будет вычитаться.
Наиболее просто радиальная СКП обсервации, полученной по любым двум навигационным параметрам (взаимозависимым или независимым), рассчитывается с помощью табл. 4.11 НМТ:
– по полным СКП навигационных изолиний вычисляется l = mлп1 / mлп2, при этом mлп1 < mлп2;
– по табл. 4.3 НМТ или по приложению 2 определяется коэффициент корреляции r. Если место определялось по взаимонезависимым однородным параметрам или по разнородным навигационным параметрам, то r = 0;
– по навигационной карте или по формуле Dt = ôt1 — t2ô определяется угол между градиентами (если r = 0, то этот угол равен углу пересечения навигационных изолиний);
– по величинам r, Dt и l из табл. 4.11 НМТ выбирается коэффициент КМ и рассчитывается
М = mлп1К. (1.4.8)
Пример.
Полные СКП радионавигационных изолиний (“Лоран-С”) mлп1 = 1,2 мили и mлп2 = 2,0 мили. Угол между градиентами Dt = 40°. Определить радиальную СКП обсервации.
Решение:
– вычисляется отношение l = 0,6;
– из табл. 4.3 НМТ для РНС “Лоран-С” определяется r = 0,4;
– по r = 0,4, Dt = 40 и l = 0,6 из табл. 4.11 выбирается коэффициент КМ = 2,6;
– по формуле (1.4.8) вычисляется искомый результат М = 1,2 ´ 2,6 = 3,1 мили.
1.5. Оценка точности вероятнейшего места, полученного по трем и более навигационным изолиниям
При определении места корабля по трем и более навигационным изолиниям (линиям положения) они, смещаясь под влиянием погрешностей измерения навигационных параметров, в одной точке, как правило, не пересекаются. В этом случае за искомое место судна принимается вероятнейшее место.
Вероятнейшее место – это точка, которая при данных условиях измерения (при реализовавшихся погрешностях измерения навигационных параметров) обладает минимальной средней квадратической погрешностью.
С вероятностных позиций, вероятнейшее место среди массы других точек, в которых возможно местонахождение корабля, является в среднем наиболее точной точкой. Чем больше навигационных изолиний и чем они точнее, тем ближе вероятнейшее место к истинному месту корабля. Поскольку конкретная величина реализовавшихся случайных погрешностей неизвестна, то за действительное место корабля принимается вероятнейшее место.
Вероятнейшее место определяется двумя методами – методом наименьших квадратов, который реализуется с помощью ЭВМ, и графоаналитическими методами, являющимися точными или приближенными аналогами метода наименьших квадратов. Каждому из этих методов присущи свои способы оценки точности.
Сущность автоматизированного определения вероятнейшего места с помощью ЭВМ состоит в нахождении вероятнейших координат корабля jв и lв и их точности методом наименьших квадратов. При этом считается, что погрешности избыточных обсервованных навигационных параметров распределены по нормальному закону.
Основная идея метода наименьших квадратов заключается в том, что неизвестные вероятнейшие поправки к счислимым координатам находятся из условия минимума суммы квадратов случайных отклонений ni («взвешенных» весами pi) навигационных параметров от их вероятнейшего значения, то есть из условия
(1.5.1)
Случайное отклонение vi i-го обсервованного навигационного параметра от вероятнейшего равно разности левой и правой частей уравнения i-й линии положения
![]() = (1.5.2)
= (1.5.2)
В этом выражении аi и bi – проекции градиента i-го навигационного параметра на координатные оси, Dj и w – искомые поправки к счислимым координатам jс и lс, li – свободный член уравнения линии положения, равный разности обсервованного и счислимого навигационных параметров.
Согласно правилу нахождения экстремума функции, условие (1.5.1) выполняется в том случае, если поправки Dj и w находятся из решения системы нормальных уравнений.
Определив отсюда поправки Dj и w и сложив их со счислимыми координатами [формула (1.5.3)], определяются вероятнейшие координаты, соответствующие минимальной (для данных реализовавшихся погрешностей) средней квадратической погрешности:
(1.5.3)
где А1, В1, А2, В2 – коэффициенты нормальных уравнений; D =A1B2 – –A2B1 – главный определитель системы нормальных уравнений; L1 и L2 – свободные члены нормальных уравнений.
Формульные выражения коэффициентов и свободных членов нормальных уравнений для случая, когда все навигационные параметры содержат одну повторяющуюся погрешность, приведены в табл. 1.5.1 [12]. Для более общего случая эти величины приведены в табл. 6.16 НМТ.
Так как исходное условие (1.5.1) соответствует минимуму суммы погрешностей, то найденные при этом условии координаты содержат минимальные СКП, то есть являются вероятнейшими.
Элементы среднего квадратического эллипса погрешностей вероятнейшего места вычисляются по формулам, вытекающим из теории метода наименьших квадратов:
(1.5.4)
Т а б л и ц а 1.5.1
|
Коэф-фици-енты, свободные члены |
Степень взаимосвязи навигационных параметров |
|||
|
Взаимонезависимы r = 0 |
Корреляционно взаимозависимы 0 < r < 1 |
Функционально взаимозависимы r = 1 |
Обозначения |
|
|
А1 |
pi = 1/mi2 ai =gicosti bi = gisinti li = Uo– Uc S=1/ mo2 + + S (1/ mi2) n – количество навигационных параметров |
|||
|
В1 = А2 |
||||
|
В2 |
||||
|
L1 |
||||
|
L2 |
Ориентировка главных осей эллипса относительно меридиана определяется углом a, который вычисляется по формуле
(1.5.5)
Если А1 > В2, то рассчитанный по этой формуле угол a определяет направление малой оси эллипса погрешностей. Если А1 < В2, то угол a определяет направление большой оси.
Радиальная СКП вероятнейшего места вычисляется по формуле
. (1.5.6)
Формулы (1.5.3)… (1.5.6) составляют математическую основуалгоритма автоматизированного определения и оценки точности вероятнейшего места.
Необходимые для автоматизированного расчета коэффициентов и свободных членов нормальных уравнений градиенты и их проекции на координатные оси, а также счислимые навигационные параметры вычисляются путем автоматизированного решения обратной геодезической задачи.
В самом общем случае при различной корреляции между погрешностями навигационных параметров математической основой автоматизированного определения и оценки точности вероятнейших координат являются матричные уравнения [15]:
(1.5.7)
где X – матрица-столбец искомых поправок к счислимым координатам;
KX – корреляционная матрица вектора X, характеризующая точность определения искомых вероятнейших координат.
Правую часть этих уравнений составляют следующие величины:
A – матрица коэффициентов линий положения («т» – символ транспонирования матрицы),
P – матрица, обратная по отношению к корреляционной матрице навигационных параметров,
L – матрица-столбец свободных членов линий положения,
s1 – СКП единицы веса (определяется по отклонениям обсервованных навигационных параметров от параметров, вычисленных относительно вероятнейшего места корабля).
Входными данными в ЭВМ являются:
– координаты счислимого места судна и координаты навигационных ориентиров, по которым определяется место;
– признак используемой навигационной системы и линейный эквивалент радионавигационных параметров;
– обсервованные навигационные параметры, их средние квадратические погрешности и коэффициенты взаимной корреляции (или корреляционные моменты навигационных параметров).
Обработка взаимозависимых навигационных параметров может также производиться методом наименьшей квадратичной формы [26].
При использовании графоаналитических методов определения вероятнейшего места его точность целесообразно оценивать только радиальной СКП, так как расчет элементов среднего квадратического эллипса при отсутствии ЭВМ связан с громоздкими вычислительными операциями, не совместимыми с требованиями быстрой оценки навигационной безопасности плавания.
При отсутствии ЭВМ задача решается графоаналитическим способом. Существует несколько различных графоаналитических способов определения места, каждый из которых приемлем в определенных условиях (см., например, [12, 13]).
Выбор графоаналитического способа зависит от состава погрешностей или от степени взаимной корреляции.
Если навигационные параметры взаимонезависимы (r = 0), то вероятнейшее место в фигуре погрешностей находится или центрографическим способом, или (при трех навигационных параметрах) способом п а р а л л е л ь н о й с т о р о н ы [14].
Если навигационные параметры функционально взаимозависимы (r = 1), то вероятнейшее место определяется способом разностных линий положения.
Если навигационные параметры корреляционно взаимозависимы (0 < r < 1), то вероятнейшее место определяется комбинированным способом.
При определении вероятнейшего места по взаимонезависимым навигационным параметрам его радиальная СКП вычисляется по формуле
M = (1.5.8)
Под знаком корня в этой формуле: в числителе – сумма весов линий положения, в знаменателе – сумма квазивесов («как бы весов») точек пересечения линий положения.
Квазивес точки пересечения i и j-й линий положения рассчитывается с помощью выражения
,
где pлпi, pлпj – веса i и j-й линий положения; qij – угол пересечения i и j-й линий положения; S – общее количество точек пересечения.
Если всего n линий положения, то S = n (n — 1) / 2.
При определении места по равноточным линиям положения (по высотам звезд или планет, по расстояниям, измеренным с одинаковой точностью pлпi = pлпj = pлп = 1 / m2лп) формула (1.5.7) упрощается и преобразуется в следующее выражение:
(1.5.9)
Если вероятнейшее место в открытом море определялось по трем линиям положения способом параллельной стороны и при этом СКП линий положения отличаются одна от другой не более чем в полтора раза, то для оценки точности места вместо строгих формул (1.5.8) и (1.5.9) можно использовать приближенную формулу
(1.5.10)
В этой формуле mлпср – среднее арифметическое значение, рассчитанное по СКП линий положения, qср – средний арифметический угол, рассчитанный по острым углам пересечения линий положения.
При определении места по функционально зависимым навигационным параметрам, то есть при пренебрежимо малых частных погрешностях, к которым относятся погрешности измерения и погрешности частных поправок, но при наличии повторяющейся погрешности (погрешности общей поправки) полученное место практически безошибочно. В том случае оценка навигационной безопасности плавания имеет не вероятностный, а детерминированный характер: безопасность плавания обеспечивается при любом положении места корабля, при котором обсервованное место (с учетом габаритов корабля) не соприкасается с навигационной опасностью.
При графоаналитическом методе определения вероятнейшего места по трем равноточным корреляционно взаимозависимым навигационным параметрам радиальная средняя квадратическая погрешность места зависит от углов w1 и w2 между направлениями на ориентиры (или от углов Dt между градиентами навигационных параметров смежных ориентиров) и вычисляется по формуле
М = g mлп, (1.5.11)
где g – коэффициент, определяемый по табл. 1.5.2.
В этой таблице mo – повторяющаяся СКП навигационного параметра, m – частная СКП. От их отношения зависит коэффициент взаимной корреляции, указанный в скобках.
С некоторым приближением этой таблицей можно пользоваться и при неравноточных линиях положения, но при условии, что отношение максимальной СКП линии положения к минимальной не превышает 1,5. В этом случае вместо частных СКП следует пользоваться их средним арифметическим значением.
Т а б л и ц а 1.5.2
|
w1 (Dt1), градусы |
w2 (Dt2), градусы |
|||||
|
30 |
60 |
90 |
120 |
150 |
||
|
30 60 90 120 |
0,5 (0,2) 1,0 (0,5) 2,0 (0,8) 0,5 (0,2) 1,0 (0,5) 2,0 (0,8) 0,5 (0,2) 1,0 (0,5) 2,0 (0,8) 0,5 (0,2) 1,0 (0,5) 2,0 (0,8) |
1,6 1,9 2,6 |
1,5 1,7 2,5 1,4 1,6 2,1 |
1,4 1,9 2,6 1,4 1,6 1,8 1,3 1,4 1,4 |
1,8 2,2 2,7 1,5 1,6 1,6 1,2 1,2 1,2 1,2 1,2 1,2 |
2,6 2,7 2,8 1,6 1,6 1,6 1,2 1,2 1,2 1,2 1,2 1,2 |
Все другие существующие способы оценки точности места по взаимозависимым параметрам, изложенные в навигационных пособиях, имеют приближенный характер. Наиболее простым из них является ориентировочный способ, основанный на использовании формального отождествления выражений для полных линейных (одномерных) и радиальных погрешностей [14], приводящего к следующей приближенной формуле:
, (r £ 0,8), (1.5.12)
где М – радиальная СКП, вычисленная по измеренным навигационным параметрам, считая, что они не содержат повторяющейся погрешности.
При предварительных расчетах навигационной безопасности плавания в прибрежных районах и в открытом море радиальную СКП обсервации допустимо рассчитывать по приближенной формуле
(1.5.13)
где n – количество линий положения.
При больших коэффициентах взаимной корреляции (0,4< r < 0,8) вычисленную по этой формуле величину для большей надежности целесообразно разделить на
Методические погрешности приближенных формул (1.5.12), (1.5.13) могут составлять 5 … 35% от их точного значения, вычисленного по строгим формулам метода наименьших квадратов. Поэтому во всех случаях, когда в открытом море требуется надежная оценка навигационной безопасности плавания, необходимо использовать эллиптические погрешности или радиальные погрешности, рассчитанные по формулам метода наименьших квадратов [формулы (1.5.4) … (1.5.7)].
Так как радиальная средняя квадратическая погрешность всегда больше соответствующей эллиптической погрешности, то при использовании радиальной погрешности будет получен перестраховочный результат оценки навигационной безопасности плавания.
1.6. Погрешность счислимого места и вероятностная оценка точности счисления
При отсутствии непрерывныхобсерваций, получаемых с помощью КНС или РНС, основой решения задачи обеспечения навигационной безопасности плавания является счисление пути, позволяющее непрерывно и на любой заданный момент времени определять координаты корабля. Обсервации производятся эпизодически и предназначаются для коррекции счисления. В общем случае все расчеты по оценке навигационной безопасности в открытом море опираются на информацию о счислимом месте корабля.
Известно [13], что средняя квадратическая погрешность счислимого места квадратически складывается из СКП последней обсервации Мо и из СКП счисления Мс (t)
(1.6.1)
Поэтому анализ точности счислимого места, производимый для оценки навигационной безопасности плавания, начинается с оценки точности счисления.
Счисление ведется по показаниям автономных технических средств морской навигации с учетом внешних факторов, воздействующих на движение корабля, – течения и дрейфа. Следовательно, на точность плавания по счислению оказывают влияние погрешности определения курса, относительной скорости, вектора скорости течения и угла дрейфа.
Погрешности современных отрегулированных гироскопических курсоуказателей и лагов, как правило, незначительны. Тем более малыми являются погрешности навигационных инерциальных комплексов. При плавании с учетом информации только от относительных лагов или с периодическим включением абсолютного лага главным фактором, формирующим погрешность счисления, является неточное знание элементов течения, обусловленное их случайной изменчивостью во времени и в пространстве.
Среднюю квадратическую погрешность счисления можно оценивать тремя способами: способом, основанным на обработке невязок счисления (по статистическим параметрам точности счисления), по погрешностям элементов счисления и по параметрам автокорреляционных функций течения и средств счисления.
Первый из этих способов в настоящее время является основным, так как он основан на использовании таких статистических величин, которые являются следствием всех факторов, влияющих на точность счисления, и которые могут быть получены в результате практического плавания кораблей без привлечения результатов исследования океанографических характеристик Мирового океана.
Оценка случайной погрешности счисления
по статистике невязок
Для оценки точности плавания кораблей по счислению в настоящее время широко используется вероятностная модель погрешностей, опирающаяся на статистику невязок. При сравнительно точных обсервациях модули невязок являются следствием случайных погрешностей счисления.
В научно-исследовательских работах, проводимых в ГосНИНГИ в рамках обобщения опыта точности плавания кораблей в различных районах Мирового океана, а также в руководствах и методиках [39, 32, 42], показано, что радиальная средняя квадратическая погрешность счисления Мс (t) зависит от интервала счисления t и характеризуется двумя параметрами точности счисления – коэффициентом точности счисления Кс и величиной q, определяющей степень нелинейности функции Мс (t):
![]()
![]()
![]() (1.6.2)
(1.6.2)
Данная модель получена опытным путем в результате обработки фактических данных о точности плавания кораблей и судов. Она составлена в предположении того, что линейное нарастание радиальных погрешностей счисления соответствует интервалу tл, равному примерно двум часам. При интервалах счисления t > 2 ч радиальная погрешность счисления изменяется по нелинейному закону.
В реальных условиях параметр tл может принимать значения, существенно отличающиеся от вышеуказанных. Поэтому величина tл является третьим параметром точности счисления. В методике [32] приведены интервалы линейного нарастания погрешности счисления, находящиеся в пределах от 2 ч (при плавании в районах с существенно преобладающей случайно изменяющейся переменной составляющей) до 10 ч (в районах с существенно преобладающей постоянной составляющей). Примерно такие же значения параметра tл приведены и в статье [4], но здесь они поставлены в зависимость от скорости корабля.
Следовательно, модель (1.6.2) с параметром tл = 2 ч может оказаться слишком приближенной, неадекватной реальным условиям.
Обобщенные результаты обработки фактических данных, полученные в ГосНИНГИ, а также информация, приведенная в [32], свидетельствуют о том, что параметр q в зависимости от характера течения находится в пределах 0,3 £ q £ 0,8.
Для получения формулы, учитывающей различные возможные значения параметров tл и q, рассмотрим зависимости, определяющие общий характер изменения радиальной СКП счисления на линейном и нелинейном участках графика Мс (t):
(1.6.3)
где К – коэффициент, характеризующий скорость линейного нарастания радиальной СКП счисления на интервале tл.
Для граничного интервала точности счисления t = tл справедливо равенство Кtл = Ксtлq. Отсюда
К = Ксtлq-1. (1.6.4)
Подставив это выражение в первую формулу выражения (1.6.2), будем иметь обобщенную модель радиальной СКП счисления, учитывающую все три параметра точности счисления (Кс, q и tл):
(1.6.5)
В этих формулах Мс (t) выражена в милях, t – в часах, а размерность Кс в обеих формулах одинаковая – [мили / чq].
Наиболее часто используемые в настоящее время формулы [2, 13, 39, 42]
(1.6.6)
выведенные для параметров tл = 2 ч и q = 0,5, являются частным случаем обобщенных формул (1.6.5).
При плавании без учета течения величина Кс зависит, главным образом, от района плавания и от сезона года.
При плавании с учетом течения коэффициент точности счисления зависит от точности и частоты определения вектора скорости течения. Чем точнее средства и методы определения течения, учитываемого при счислении, и чем чаще оно определяется, тем меньше коэффициент точности счисления и, следовательно, тем точнее плавание по счислению. Отсюда следует, что плавание с использованием современных навигационных комплексов, непрерывно или дискретно вырабатывающих вектор абсолютной скорости корабля, существенно точнее, чем плавание с обычными средствами курсоуказания и скорости.
Наиболее вероятным при плавании в открытом море параметрам q = 0,5 и tл = 2 … 4 ч соответствуют коэффициенты точности счисления, находящиеся в следующих ориентировочных пределах:
– при плавании без учета течения – 1,6 … 3,0;
– при плавании с использованием информации о скорости корабля только от относительного лага и с учетом течения, выбранного из навигационных пособий, – 1,0 … 2,0;
– при плавании с использованием информации о скорости корабля только от относительного лага и при определении течения по высокоточным обсервациям (с периодичностью 1 … 2 ч) – 0,8 … 1,6;
– при плавании с использованием навигационного комплекса с инерциальной навигационной системой (ИНС) при дискретном определении течения по показаниям абсолютного и относительного лагов (через каждые 0,5 … 1,5 ч) – 0,4 … 0,6;
– при плавании с использованием навигационного комплекса с инерциальной навигационной системой и при непрерывной работе абсолютного лага – 0,1 … 0,3.
При океанском плавании с относительным лагом в штормовых условиях по данным учебника [2] коэффициент точности счисления может достигать величины 3,0 … 4,0.
Наиболее достоверно все параметры точности счисления Кс, q и tл определяются комплексно по результатам статистической обработки модулей невязок, полученных по высокоточным обсервациям при плавании в данном море с использованием одного и того же режима работы навигационного комплекса и одного и того же метода оценки вектора скорости течения. Для осреднения пространственной и временной корреляции элементов течения, при определении параметров точности счисления используются невязки, полученные на различных курсах и скоростях кораблей.
Методика комплексного расчета параметров точности счисления Кс и q (для заданного значения tл) изложена в ряде пособий (см., например, [14]). В работах [4, 5, 15] приводится методика расчета коэффициента точности счисления, основанная на использовании параметров автокорреляционной функции морского течения.
Важно иметь в виду, что при использовании навигационного комплекса с ИНС случайная погрешность широты практически не зависит от интервала счисления и для данного режима работы комплекса принимается величиной постоянной, которая определяется по данным, характеризующим работу системы. В этом случае параметры точности счисления определяются по проекциям невязок на параллель и используются только для оценки точности плавания по долготе.
Поскольку условия данного плавания, как правило, отличаются от осредненных условий, при которых определялись параметры точности счисления, то последние могут использоваться лишь для ориентировочного прогнозирования точности плавания по счислению в заданном районе.
Оценка точности счисления
по погрешностям элементов счисления
Для анализа навигационной безопасности плавания непосредственно в море на интервалах счисления, не выходящих за пределы линейного участка нарастания СКП счисления, целесообразно использовать прямой способ оценки точности счисления, основанный на учете текущих погрешностей элементов счисления и не зависящий от статистических параметров точности счисления.
В этом случае после каждого определения вектора скорости течения (по обсервации или по показаниям абсолютного и относительного лагов) рассчитываются средние квадратические погрешности элементов выявленного сноса и затем вычисляется радиальная СКП счисления:
(1.6.7)
В этой формуле m – средняя квадратическая погрешность того элемента счисления, который обозначен в индексе данного символа.
СКП элементов течения вычисляются способами, зависящими от средств и методов определения течения [13, 42]. СКП направления линии истинного курса квадратически складывается из СКП курсоуказателя (определяется по формуляру курсоуказателя) и из СКП его поправки. СКП относительной скорости определяется по результатам ее последних замеров на мерном полигоне.
Поскольку главный вклад в погрешность счисления вносит неточное знание элементов течения, то при отсутствии достоверных данных о погрешностях систем курсоуказания и относительной скорости радиальная СКП счисления может быть приближенно рассчитана по двум последним слагаемым, стоящим под знаком корня.
Существенным достоинством способа оценки точности счисления по погрешностям элементов счисления являются три фактора: исключается необходимость накопления совокупности невязок и, следовательно, способ применим в неоплаванных районах; способ реагирует на изменяющиеся условия плавания (так как учитываются реальные погрешности оценки элементов течения, зависящие от способа определения течения); простота способа. К недостатку способа следует отнести ограниченность его использования пределами линейного нарастания СКП счисления.
Оценка случайной погрешности счисления по параметрам
автокорреляционных функций течения и средств счисления
Радиальная средняя квадратическая погрешность счисления Мс (t) является функцией векториальных средних квадратических погрешностей учитываемых течения, дрейфа, курса и относительной скорости. Для простоты примем взаимно перпендикулярные проекции (на меридиан и параллель) каждой из указанных векториальных СКП одинаковыми и обозначим их символами sc1(t), sc2(t), sc3(t) и sc4(t), соответственно. Тогда получим
(1.6.8)
Рассмотрим в порядке очередности каждую из величин, стоящих под знаком корня.
Средняя квадратическая погрешность счисления sc1(t), обусловленная неточностью учитываемого вектора скорости течения.
Неточное знание течения является основным фактором, формирующим погрешность счисления.
Физическая природа морских течений такова, что они обладают значительной случайной изменчивостью во времени и в пространстве. Поэтому элементы течения, определенные в данный момент и в данной точке, могут существенным образом отличаться от их значений, определенных в другой момент или в другой точке.
Случайность непериодического течения предопределяет вероятностный характер его оценки на моменты времени, не совпадающие с моментом измерения направления и скорости течения. Для этого используется математический аппарат теории случайных функций.
Основой этого аппарата являются автокорреляционные функции, устанавливающие вероятностную взаимосвязь между скоростями течения в различные моменты времени (в различных точках пространства) и позволяющие прогнозировать вероятнейшие значения скорости течения. При анализе морских течений вектор скорости течения чаще всего раскладывают на две составляющие (по географическим координатным осям).
Поскольку средние квадратические значения каждой составляющей приняты одинаковыми, то в дальнейшем речь будет идти об одной проекции sс1 средней квадратической погрешности счисления, а оценка радиальной погрешности счисления за счет неточности течения будет производиться с учетом обеих составляющих.
В скорости морского течения выделяют две составляющие: низкочастотную, или долгопериодную, и высокочастотную, или короткопериодную.
Низкочастотная составляющая изменяется медленно. Средний период ее изменения может измеряться десятками часов или даже сутками. Поэтому низкочастотная составляющая при решении задач навигационной безопасности принимается за квазипостоянное (как бы постоянное) течение для данного короткого периода плавания между измерениями течения или между обсервациями.
Высокочастотная составляющая течения более подвижна и изменчива. Период ее изменения для большинства открытых районов океана составляет всего несколько часов. Высокочастотную составляющую течения называют переменным течением.
Автокорреляционные функции низкочастотной и высокочастотной составляющих течения открытого моря чаще всего аппроксимируются уравнениями следующего вида:
(1.6.9)
В этой формуле s2 – дисперсия скорости течения (его одной составляющей); a и b – параметры автокорреляционной функции, первый из них характеризует степень затухания корреляционной связи, второй – «колебательность» корреляционной функции относительно оси времени (соответствует преобладающей частоте в спектре случайного процесса).
Дисперсию квазипостоянной составляющей скорости течения будем обозначать s2п, дисперсию переменной составляющей – s2пр. Также: aп – параметр квазипостоянной составляющей скорости течения, aпр – параметр переменной составляющей.
Вид и параметры автокорреляционной функции определяются опытным путем по результатам многочисленных замеров проекций скорости течения в данном ограниченном районе моря.
По данным работ [4, 5], в открытых районах Мирового океана автокорреляционная функция проекций скорости течения аппроксимируется первой формулой (1.6.9), а обобщенные среднестатистические характеристики ее параметров s2 и a, вычисленные по длительным (месячным) измерениям течений, приведены в табл. 1.6.1 (в этой таблице V – скорость корабля в узлах). Эти данные опубликованы в статье [4].
В ограниченных районах океана и в отдельных морях вид и параметры автокорреляционной функции могут существенно отличаться от указанных в этой таблице.
Т а б л и ц а 1.6.1
|
Вид течения (составляющие течения) |
Параметры |
|
|
s2 |
a |
|
|
Квазипостоянное Переменное |
s2п = 0,12 уз2 s2пр = 0,20 уз2 |
aп = 0,02V ч–1 aпр = 0,1+(V / 10)2/3 ч–1 |
Скорость корабля, обусловленная воздействием течения, так же, как и само течение, изменяется случайным образом, но характер случайной функции изменения скорости корабля будет несколько сглаженным. Степень сглаживающего эффекта зависит от инерционных и гидродинамических характеристик корабля. С точностью, достаточной для оценочных характеристик погрешностей счисления, можно принять, что автокорреляционная функция изменения скорости корабля под воздействием течения имеет такие же параметры, как и автокорреляционная функция скорости течения.
Случайные колебания скорости корабля, обусловленные воздействием течения, вызывают накапливающуюся с течением времени случайную погрешность счисления, которая на определенном интервале времени может быть принята за стационарную случайную функцию. Поскольку автокорреляционная функция случайной погрешности счисления приближенно соответствует автокорреляционной функции течения, то на основании правила о дисперсии интеграла стационарной случайной функции [44], дисперсия счисления выражается формулой, учитывающей воздействия на корабль всех составляющих скорости морского течения:
(1.6.10)
где t – время плавания по счислению, ч; Кп (t) и Кпр (t) – автокорреляционные функции квазипостоянной и переменной составляющих скорости течения соответственно [вид этих функций определяется формулами (1.6.9)]; sд – среднее квадратическое значение скорости ветрового (дрейфового) течения в узлах, обусловленного воздействием на водную поверхность силы ветра.
В приповерхностном слое, то есть на глубине до 20 м, величина sд в узлах вычисляется по приближенной формуле [32]: sд = =0,12 + 0,02u, где u – скорость устоявшегося истинного ветра в м/с. Скорость ветрового течения уменьшается с глубиной: на глубине 60 м оно составляет 0,4sд, а на глубине 100 м – 0,2sд. На глубинах свыше 100 м ветровое течение практически отсутствует.
В табл. 1.6.2 представлены вычисленные по этой формуле средние квадратические погрешности счисления sс1(t) в милях, соответствующие плаванию без учета течения и с нулевым значением ветровой составляющей. Таблица рассчитана по автокорреляционной функции усредненного океанского течения [4] [с учетом первой формулы (1.6.9) и параметров, указанных в табл. 1.6.1].
Произведя по этим табличным данным расчеты радиальной СКП счисления (она в 1,4 раза больше линейной СКП одной проекции, указанной в таблице), обнаружится, что при суточном плавании в океане со средней скоростью 10 уз без учета течения радиальная СКП счисления составит около 8 миль, а при плавании со скоростями 15 … 20 уз – в пределах 6 …7 миль. Ошибка счисления нарастает в среднем на 0,3 мили за каждый час плавания.
При рассматриваемых параметрах автокорреляционных функций с увеличением скорости погрешность счисления, обусловленная неучетом океанского течения, уменьшается. Так, например, разница в погрешностях счисления при суточном плавании скоростями 5 и 25 уз составляет 3 мили, то есть СКП счисления на скорости 25 уз меньше СКП при плавании со скоростью 5 уз в 1,8 раза.
Т а б л и ц а 1.6.2
|
Интервал счиcления, ч |
Скорость судна, уз |
||||
|
5 |
10 |
15 |
20 |
25 |
|
|
0,2 0,4 0,6 0,8 1,0 1,4 1,6 2,0 6,0 10,0 14,0 18,0 22,0 24,0 |
0,11 0,22 0,32 0,42 0,52 0,71 0,81 0,98 2,47 3,68 4,73 5,67 6,53 6,93 |
0,11 0,21 0,31 0,41 0,51 0,68 0,76 0,92 2,20 3,18 3,99 4,68 5,30 5,58 |
0,11 0,21 0,31 0,40 0,49 0,65 0,73 0,88 2,02 2,84 3,51 4,08 4,57 4,80 |
0,11 0,21 0,30 0,39 0,48 0,63 0,70 0,84 1,87 2,60 3,17 3,66 4,09 4,29 |
0,11 0,21 0,30 0,38 0,46 0,61 0,68 0,81 1,76 2,41 2,92 3,35 3,74 3,92 |
При плавании с учетом выявленного течения ошибка счисления уменьшается. В первоначальный период после определения течения она практически равна нулю (если не учитывать погрешности способа определения течения). Но поскольку характер случайной изменчивости течения остается прежним, то в последующем в выявленном и учитываемом течении появляются погрешности. Это значит, что учитываемое течение, изменяясь со временем, будет устаревать. Следовательно, с увеличением времени, прошедшего после определения течения, будет увеличиваться и погрешность счисления.
Прогнозируемые значения средних квадратических погрешностей квазипостоянной (![]() ) и переменной () составляющих учитываемых проекций скорости течения через интервал времени t после определения течения рассчитываются по формулам [24]:
) и переменной () составляющих учитываемых проекций скорости течения через интервал времени t после определения течения рассчитываются по формулам [24]:
(1.6.11)
где rп (t) и rпр (t) – нормированные автокорреляционные функции квазипостоянного и переменного течений (соответственно), равные частному от деления соответствующих автокорреляционных функций на квадраты их средних квадратических погрешностей.
Квадрат радиальной СКП счисления после определения скорости течения (без учета дрейфовой составляющей) для первой корреляционной функции (1.6.9) вычисляется по формуле, приведенной в работе [4]:
где i = 1 – индекс параметров, соответствующих квазипостоянной составляющей (см. табл. 1.6.1); i = 2 – индекс параметров, соответствующих переменной составляющей; N – количество измерений скорости течения; Dt – дискретность измерения течения.
Расчеты радиальной СКП счисления, выполненные по этой формуле (после извлечения корня) для 12-часового интервала плавания по счислению скоростью 15 уз и для различного количества измерений течения, приведены в табл. 1.6.3.
Линейная СКП счисления без учета течения на этом временном интервале в соответствии с табл. 1.6.2 составляет 3,2 мили, а радиальная СКП равна 4,5 мили. Отношение этого значения к радиальным СКП, указанными в табл. 1.6.3, определяет эффективность k учета течения (последний столбец таблицы). Две последних строки этой таблицы (k < 1) свидетельствуют о том, что длительный учет одного течения приводит к погрешностям счисления, превышающим те, которые были бы при плавании без учета течения.
Т а б л и ц а 1.6.3
|
N |
Dt, ч |
Мc (t), мили |
k |
|
12 6 4 3 2 1 |
4 2 3 4 6 12 |
1,2 2,4 3,4 4,3 5,8 9,3 |
3,8 1,9 1,3 1,0 0,8 0,5 |
Расчеты для рассматриваемой корреляционной функции показывают, что оптимальная (по критерию точности счисления) длительность учета последнего измеренного течения при скорости корабля 5 уз составляет 1,8 ч. Чем больше скорость корабля, тем больше влияние пространственной изменчивости течения, поэтому длительность учета течения при скорости корабля 25 уз составляет всего 0,6 ч.
Для средних скоростей корабля порядка 15 уз время учета течения не должно превышать 0,9 … 1 ч. Большая продолжительность учета данного течения приведет к понижению точности плавания.
Приведенные здесь числовые оценочные характеристики точности счисления даже для океанского плавания являются сугубо ориентировочными, так как в отдельных регионах океана могут наблюдаться существенные отклонения вида и параметров автокорреляционных функций от среднестатистических, используемых в данном труде.
Другой вид и другие параметры автокорреляционных функций, соответствующих течениям конкретных ограниченных районов, обусловят и другие выходные данные о точности счисления.
Практическое использование способа целесообразно только при наличии персональной ЭВМ, спрограммированной по приведенным здесь формулам.
2. Средняя квадратическая погрешность счисления sc2(t), обусловленная неточностью учитываемого дрейфа.
Ветер является причиной не только ветрового (дрейфового) течения, но и дрейфа корабля. Под воздействием ветра изменяется скорость корабля и направление его перемещения. Изменение скорости учитывается лагами, а изменение направления движения учитывается введением поправки – угла дрейфа.
Найденные экспериментальным способом углы дрейфа подвержены случайным колебаниям, обусловленным случайной изменчивостью силы и направления ветра и гидродинамических ударов волн по надводной части корпуса корабля. Степень взаимосвязи случайных погрешностей учитываемого угла дрейфа для разных моментов времени характеризуется случайной функцией.
Применяя теорию случайных функций к определению дисперсии погрешностей счисления, вызванной изменчивостью углов дрейфа [15], можно получить следующую ориентировочную формулу:
(1.6.13)
где V – скорость корабля, уз; sоa – среднее квадратическое отклонение угла дрейфа в градусах, обусловленное его изменчивостью (по данным работы [37], оно находится в пределах от 1,1 до 1,5°); Кa – коэффициент, определяемый по параметрам автокорреляционной функции дрейфа (его ориентировочное значение находится в пределах 0,3 … 0,8); t – время плавания с учетом данного угла дрейфа, ч; – средняя квадратическая погрешность способа определения угла дрейфа, градусы. При использовании современных способов определения угла дрейфа эта величина не превышает 0,5°.
3. Средняя квадратическая погрешность счисления sc3(t), обусловленная неточностью системы курсоуказания.
При использовании современных навигационных комплексов, в состав которых входит инерциальная навигационная система, средние квадратические погрешности системы курсоуказания составляют 0,05 … 0,2°. Случайные возмущения системы демпфируются специальными устройствами, что позволяет хранить направление географического (истинного) меридиана с указанной точностью. Столь малые погрешности в курсе корабля вызывают погрешность счисления, пренебрежимо малую по сравнению с погрешностями, обусловленными неточным знанием и изменчивостью морского течения.
При счислении пути корабля по гироскопическому компасу направление истинного меридиана и, следовательно, направление истинного курса определяется с более низкой точностью.
В процессе плавания на гирокомпас воздействуют силы инерции, появляющиеся в моменты изменения скорости или курса и во время качки корабля. Эти силы вызывают затухающие инерционные погрешности, и в результате ранее определенная поправка гирокомпаса случайным образом изменяется. Этот фактор обусловливает появление нарастающей по времени случайной линейной погрешности счисления в направлении, перпендикулярном линии курса корабля.
Используя математический аппарат случайных функций способом, аналогичным способу, примененному при оценке погрешностей морских течений, можно получить дисперсию погрешностей счисления, обусловленную случайными погрешностями гирокомпаса:
(1.6.14)
где ![]() – среднее квадратическое значение колебаний оси чувствительного элемента гирокомпаса (по данным [26, 32], эта величина находится в пределах от 0,4 до 0,7°); КК – коэффициент, определяемый по параметрам автокорреляционной функции, принимающий значения от 0,4 до 0,5; – средняя квадратическая погрешность поправки гирокомпаса (0,3 … 0,4°); t – время плавания по счислению, ч.
– среднее квадратическое значение колебаний оси чувствительного элемента гирокомпаса (по данным [26, 32], эта величина находится в пределах от 0,4 до 0,7°); КК – коэффициент, определяемый по параметрам автокорреляционной функции, принимающий значения от 0,4 до 0,5; – средняя квадратическая погрешность поправки гирокомпаса (0,3 … 0,4°); t – время плавания по счислению, ч.
4. Средняя квадратическая погрешность счисления sc4(t), обусловленная ошибками измерения относительной скорости корабля.
Определенная на мерной линии поправка относительного лага имеет нестабильный характер. Для гидродинамических лагов она изменяется под влиянием дрейфа, дифферента корабля, обрастания корпуса, качки и изменения плотности морской воды. Для индукционных лагов поправка лага изменяется под влиянием нестабильности электромагнитной индукции. Параметры случайных функций изменения относительной скорости в настоящее время неизвестны [47]. Поэтому точность скорости, вырабатываемой относительным лагом, оценивается только средней квадратической погрешностью учитываемой поправки лага без учета автокорреляционной функции.
Считается, что в зависимости от способа определения поправок лага, СКП относительной скорости заключается в широких пределах: от 0,01 уз при определении поправок лага с помощью высокоточной гидрографической РНС до 0,05 уз при определении поправки лага на визуальной мерной линии.
СКП счисления, обусловленная погрешностью в относительной скорости, рассчитывается по сугубо приближенной формуле
(1.6.15)
где sV – средняя квадратическая погрешность относительной скорости, уз; t – время плавания по счислению.
Подставив значения в формулу (1.6.8), можно вычислить радиальную среднюю квадратическую погрешность счисления, которая и используется для расчета вероятности навигационной безопасности плавания.
При выработке курса и пройденного расстояния современным навигационным комплексом последние два слагаемых в формуле (1.6.8) существенно меньше первых слагаемых.
При различных дисперсиях скорости течения по меридиану и по параллели слагаемые формулы (1.6.8) заменяются суммой составляющих дисперсий. В этом случае коэффициент 1,4 перед корнем заменяется на единицу.
Проблема повышения точности плавания кораблей успешно решается при использовании абсолютных лагов. При их непрерывной работе счисление ведется относительно поверхности Земли, то есть с учетом воздействия на корабль всех факторов, в том числе и морского течения. При этом исключается необходимость определения и учета основных факторов, формирующих погрешности счисления.
При использовании абсолютного лага в дискретном режиме при каждом его включении определяется вектор скорости течения [13], который учитывается в продолжении времени 0,5 … 2.0 ч.
В том случае, если на интервале счисления t (после последней обсервации) вектор скорости течения с помощью абсолютного лага определялся N раз, то радиальная СКП счисления за время плавания t от момента последней обсервации до данного момента рассчитывается по формуле (1.6.12).
Существенным препятствием практического внедрения метода оценки точности плавания по счислению на основе использования автокорреляционных функций является то, что к настоящему времени степень изученности автокорреляционных функций течения в различных регионах Мирового океана крайне низка. Изучение случайных функций течения для всего Мирового океана составляет серьезную проблему, которая вряд ли будет решена в ближайшем будущем. Можно лишь надеяться на то, что автокорреляционные функции и их параметры могут быть идентифицированы в отдельных, часто используемых кораблями, районах. Этому может способствовать наличие на современных кораблях абсолютных лагов и высокоточных среднеорбитальных КНС, с помощью которых в процессе повседневного плавания можно накопить необходимую информацию для оценки автокорреляционных функций.
1.7. Оценка погрешности места корабля по заданному направлению
При оценке навигационной безопасности плавания возникает задача определения погрешности места корабля по вполне определенному заданному направлению. Например, при плавании по фарватеру требуется знать погрешность места корабля по направлению перпендикуляра к оси фарватера. При сближении с навигационной опасностью необходимо знать погрешность места по направлению на эту опасность и т. п.
Погрешность места корабля по заданному направлению рассчитывается способами, зависящими от вида погрешности, которой оценивается точность места корабля.
Если место корабля оценивается средним квадратическим эллипсом, то СКП места по заданному направлению L (рис. 1.7.1) –величина mL – равна квадратической сумме проекций главных полуосей a и b среднего квадратического эллипса погрешностей на это направление.
Поэтому
(1.7.1)
где y – угол между большой полуосью эллипса a и заданным направлением L.
Концы векториальных средних квадратических погрешностей mL, взятых по всем направлениям, образуют кривую, называемую подерой эллипса погрешностей.
Если место корабля определено по двум линиям положения (рис. 1.7.2), то средняя квадратическая погрешность места по заданному направлению L рассчитывается как квадратическая сумма проекций векториальных средних квадратических погрешностей ml2 и ml2 на заданное направление:
(1.7.2)
где a1 и a2 – углы между линиями положения и заданным направлением.
Формулой (1.7.2) можно пользоваться и при определении места по любому количеству линий положения и полученное место оценивается средним квадратическим эллипсом. В этом случае ml2 и ml2 – любая пара сопряженных полудиаметров среднего квадратического эллипса. Углы a1 и a2 при этом будут углами, под которыми сопряженные полудиаметры пересекаются с заданным направлением.
Если место корабля оценивается радиальной средней квадратической погрешностью М, то погрешности места по всем направлениям будут одинаковыми. Их среднее квадратическое значение оценивается приближенной формулой (1.3.9).
Смотрите также
НАВИГАЦИОННЫЕ ИЗМЕРЕНИЯ
И ИХ ПОГРЕШНОСТИ
1. Основные термины и определения теории
погрешностей
Постановка задачи. Основной задачей навигации
является
обеспечение навигационной безопасности плавания (НБП)
и маневрирования
судна. Элементарный вариант прохождения судна мимо
навигационной
опасности на безопасном расстоянии Dбзп
представлен на рисунке 4.1
Рисунок 1.1 – Прохождение судна мимо одиночной
навигационной опасности.
Линию пути судна прокладывают так, чтобы минимальное
текущее
расстояние D до опасности не оказалось меньше
безопасного расстояния, т. е.
DDбзп.
Безопасное расстояние рассчитывают с учётом погрешностей
определения расстояния D. Чем лучше известны
свойства этих погрешностей,
тем правильнее будет рассчитано расстояние Dбзп
и качественнее решена задача
НБП. Навигационная метрология занимается изучением
свойств погрешностей
измерений величин, от которых зависит качество
расчётов величины Dбзп. Это
изучение начинается с терминов и определений,
применяемых в теории
погрешностей метрологии судовождения.
Терминология измерений. Рассматриваемые ниже
термины
базиоуются на основополагающих государственных
стандартах и справочниках
по метрологии [ГОСТ 8.009-84. Нормируемые
метрологические
характеристики. – М.:1988. – 152 с.// ГОСТ 16.263-70.
Метрология. Термины и
определения. –М.:1970.–54 с., и др.].
Параметр — величина,
характеризующая какое-либо свойство процесса,
явления, системы. В этом же смысле используют термины показатель,
характеристика.
Физическая величина —
свойство, общее в качественном отношении
многим физическим объектам, но индивидуальное для
каждого объекта в
количественном отношении. Координаты места судна,
элементы вектора его скорости и пройденного расстояния, все величины, измеряемые
морскими средствами навигации (МСН), являются физическими величинами и
называются навигационными величинами.
Значение величины – оценка
физической величины в виде некоторого числа принятых для нее единиц. Истинное
значение величины – значение, соответствующее идеальным образом в
количественном отношении свойствам объекта. Действительное значение величины
– значение, найденное экспериментальным путем и настолько приближающееся к
истинному значению, что для данной цели может быть использовано вместо него. Эталонное
значение величины – значение, найденное экспериментальным путем и
используемое вместо истинного с учетом того, что его точность не так велика,
чтобы погрешностью эталонного значения можно было пренебречь при его сравнении
с измеренным значением. Вероятнейшее (средневзвешенное) значение величины –
значение величины, рассчитанное по результатам нескольких (n) измерений
при условии максимума апостериорной плотности вероятности (в случае нормального
(гауссовского) распределения с этим условием совпадает минимум дисперсии).
Измерение – нахождение
значения физической величины опытным путем (с помощью специальных технических
средств). Иногда в этом же смысле используют термин выработка, например,
курса судна гирокомпасом. Отсчет (фиксация, измерение) — единичный
результат измерений. Реализация (серия, ряд, выборка) отсчетов –
несколько выполненных подряд с некоторым интервалом времени отсчетов одного и
того же параметра.
Наблюдение – более или менее
длительный и целенаправленный процесс производства измерений с регистрацией их
результатов (отсчётов).
Продолжительность наблюдений
(длительность, длина реализации) – промежуток времени от начала до
конца измерений.
Дискретность измерений (отсчетов,
фиксаций) –
временной (пространственный) интервал между последовательными отсчетами.
Длительность цикла измерений –
промежуток времени между началами двух реализаций, следующих одна за другой с
некоторым интервалом времени.
Прямые измерения – измерения,
выполняемые путем непосредственного сравнения измеряемой величины с единицей
измерений, например, измерение курсового угла объекта с помощью репитера
гирокомпаса. Косвенные
измерения – измерения, при
которых измеряемая величина рассчитывается как
функция одного или нескольких прямых измерений. В
большинстве МСН
реализован принцип косвенных измерений, например,
измерение глубины под
килем с помощью эхолота, когда напрямую измеряется
время распространения
сигнала. В ряде случаев получение результата при
косвенных измерениях
называют выработкой величины. Совокупные
измерения – такие измерения,
когда интересующие нас величины находят путем решения
системы уравнений,
в которые входят результаты измерений некоторых других
величин.
Координаты судна на выходе систем оптимальной
обработки информации
являются результатом совокупных измерений.
Дискретные (прерывные) измерения –
измерения, выполняемые с
некоторым интервалом времени (единиц пространства),
называемым
дискретностью измерений (временной
или пространственной).
Независимые (некоррелированные) измерения – измерения,
результаты
которых характеризуются нулевым или пренебрежимо малым
коэффициентом
взаимной корреляции. Коррелированные измерения –
измерения, результаты
которых характеризуются достаточно большим
коэффициентом взаимной
корреляции.
Терминология навигационных измерений. Навигационный
параметр
(НП) – физическая величина, характеризующая положение
(координаты места)
или перемещение судна в пространстве. Навигационный
параметр положения
– навигационный параметр, который является функцией
географических (или
других используемых в навигации) координат места судна
и навигационного
ориентира (ориентиров), и измеряется для определения
места судна.
Навигационный параметр
движения — величина, характеризующая направление
и/или скорость движения судна в заданной системе
координат.
Обсервованный навигационный параметр
положения —
измеренный с
помощью МСН определения места навигационный параметр
положения,
исправленный всеми соответствующими поправками. Обсервованное
место
(ОМ) судна – точка местоположения судна на земной
поверхности,
соответствующая двум или нескольким обсервованным НП
положения.
Счислимый (прогнозируемый) навигационный
параметр положения – НП
положения, полученный методом (или выработанный
системой)
относительного, абсолютного или инерциального
счисления. Счислимое
(прогнозируемое) место судна – точка
местоположения судна,
соответствующая двум счислимым НП положения. Счислимое
значение
обсервованного НП положения – значение
обсервованного НП в счислимом
(или обсервованном с помощью другого МСН) месте судна.
Обсервованный навигационный параметр
движения –
измеренный с
помощью МСН обсервации, (например, приёмоиндикатором
GPS) НП
движения, или же навигационный параметр движения,
полученный в процессе
обработки разновременных обсервованных координат
судна.
Навигационная изолиния — линия на
земной поверхности, все точки
которой соответствуют одному и тому же значению НП
положения.
Линия положения — отрезок прямой
линии, заменяющей навигационную
изолинию вблизи места судна.
Терминология погрешностей измерений. Погрешность
результата
измерения НП – отклонение
результата измерения (Uизм) от действительного
(истинного) значения (Uдст) измеряемого НП,
определяемое по формуле
δU=δ=X=Uизм–Uдст. В
литературе обычно погрешность обозначают символом Δ.
Однако в навигации этот же символ употребляется для
обозначения поправки, а
также приращения величины и разности двух величин.
Чтобы исключить
путаницу поправки с погрешностью, мы будем обозначать
погрешность
символом δ или Х, а погрешность,
рассматриваемую как случайная величина –
символами «X» или «Y». Конкретные
значения погрешностей будем обозначать
символами «x» или «y».
В зарубежной литературе величину δU=δ
обозначают также термином неопределённость,
который мы будем использовать при характеристике
степени неточности поправок и других величин
и методов решения задач.
Средняя квадратическая (или стандартная)
погрешность (СКП)
m
измерений – характеристика рассеяния погрешности
измеряемой величины
относительно её математического ожидания, равная корню
квадратному из
дисперсии D измеряемой случайной величины
(погрешности). СКП определяют
по опытным данным по формуле Бесселя с поправкой
Стьюдента (первая из
следующих ниже формул), или по формуле Гаусса (вторая
формула), если
известно математическое ожидание Mx или
истинное значение измеряемой
(случайной) величины Х [Абчук ___9._В. А.,
Матвейчук Ф. А., Томашевский Л,, П.
Справочник по исследованию операций.. — М.: Воениздат,
1979. — 368 с.]:
m=[ (xi–x*)2/(n–1,45)]0,5,
или m=[ (xi–Mx)2/n]0,5. (4.1)
В этих формулах (и далее): символ обозначает
суммирование по всем
i от 1 до n; х*= xi/n –
среднеарифметическое значение; 1,45 – элемент
Стьюдента, учитывающий низкую точность оценки СКП при
малом числе
измерений; n – количество измерений в выборке [x]
отсчётов случайной
величины (НП) Х
[x] = x1, …, xi, …, xn; i=1,
n (4.2)
Символами Х, Y, Z обозначают случайные
величины, символами х1, х2, …;
y1, y2, … –
их конкретные значения. На практике часто используют более
удобную для расчётов и программирования формулу
m = {[ x2
i – ( xi)2/n]/(n–1,45)}0,5
. (4.3)
Пример 4.1. Выполнено 5
измерений дистанции до одного и того же удалённого мыса: 218,53;
219,15; 220,21; 221,27; 219,43 кбт. Рассчитвть СКП
измерений дистанции в данных условиях.
Решение: по формуле (4.3)
рассчитываем
m={[241384,46 – (1206899,9)/5]/3,55}0,5=1,12 кбт.
Если использовать формулу Бесселя без поправки
Стьюдента, то есть иметь в знаменателе не
(n–1,45), а (n–1), то в результате
получим m’=0,9 кбт, т.е. СКП окажется на 19,6 20% меньше.
Читателю предлагается самостоятельно выполнить расчёты
по (4.1) и убедиться что при этом
трудоёмкость решения возрастает.
Абсолютная погрешность – погрешность
измерений, выраженная в
единицах измеряемой величины.
Относительная погрешность измерений –
погрешность измерений, выраженная
отношением абсолютной погрешности
измерений к действительному значению
измеряемой величины. Относительную
погрешность выражают в процентах.
Нормированная погрешность измерений –
погрешность измерений, выраженная
отношением абсолютной погрешности
измерений к значению стандартной
погрешности измеряемой величины.
Нормированную погрешность выражают в
единицах и долях СКП.
По источникам происхождения погрешности
навигационных измерений
подразделяются на аппаратурные
(инструментальные, приборные),
методические (погрешности метода измерений
и обработки их результатов),
субъективистские и погрешности,
возникающие вследствие отклонения
условий измерений от установленных, или
стандартных (в навигации обычно
наиболее важные, так как вызываются
воздействием природных факторов,
изменяющихся во времени и в пространстве).
Такие погрешности иногда
называют внешними. Каждый из этих видов
погрешностей может
подразделяться на подвиды в зависимости от
конкретных источников
возникновения погрешностей.
Элементарная погрешность измерений
(составляющая погрешности) –
погрешность измерений, обусловленная
воздействием конкретного фактора.
Элементарная СКП измерений – средняя
квадратическая погрешность
элементарной составляющей.
Полная погрешность измерений – погрешность
измерений, включающая в
себя все известные существенные
составляющие.
Полная СКП измерений – СКП полной
погрешности измерений.
По влиянию на полную погрешность
конкретные ее составляющие
подразделяются на превалирующие,
существенные и слабодействующие,
которыми при расчетах можно пренебречь по
малости их СКП. Обычно при
определении слабодействующих составляющих
руководствуются «правилом
трех сигм» и исключают из
рассмотрения составляющие, СКП которых не
превосходит одной трети (иногда одной
второй) полной СКП (рассчитанной без
учета рассматриваемых предположительно
слабодействующих составляющих).
Превалирующие погрешности – одна (иногда
две) элементарные погрешности,
характеризуемые наибольшими СКП среди всех
существенных элементарных
погрешностей, образующих полную
погрешность.
По характеру проявления погрешности
данного ряда навигационных
измерений подразделяются на случайные,
систематические и грубые
___¤___r_¤__(необычно большие,
экстремальные). Систематические для данного ряда
измерений погрешности могут быть
случайными в другом ряду, или наоборот.
Эти погрешности далее рассматриваются
более подробно.
По наличию внутренней корреляционной связи
погрешности
навигационных измерений подразделяются на
автокоррелированные и
неавтокоррелированные.
4.2 Случайные и систематические погрешности
навигационных
параметров
Случайной (Сл) погрешностью (СлП)
называют погрешность,
которая является случайной величиной и
может принять в результате опыта
то или иное значение, причём заранее
неизвестно, какое именно. СлП
измерений НП является в большинстве
случаев следствием действия одной –
двух основных и нескольких дополнительных
причин. Каждая j-ая причина
обусловливает свою составляющую СлП δслj,
иногда называемую
элементарной СлП. Поэтому СлП
представляет собой сумму всех случайных
элементарных погрешностей. На основании
выполненного исследования
статистических моделей погрешностей разных
НП [Методики вероятностных
расчетов при решении навигационных задач
на кораблях и судах ВМФ (МВР-
96)./ Михальский В. А., Рябоконь В. А. –
СПб.: ГУНиО МО РФ, 1999. — 218 с.]
структуру случайных погрешностей НП для
общего случая можно
представить в виде суммы
n
CЛ 1 СЛj= Ш + КП + СП +
ДП + СДП +…, (4.4)
где n — количество составляющих
(элементарных погрешностей); Ш –
шумовая; КП — короткопериодная; СП —
среднепериодная; ДП —
долгопериодная; СДП – сверхдолгопериодная
составляющие. В конкретных
случаях некоторые из этих составляющих
могут отсутствовать, и теоретически
возможно присутствие дополнительных
составляющих. Если хотят
подчеркнуть, что в число n входят все
существенные элементарные
погрешности, то величину δсл называют
полной, или суммарной случайной
погрешностью. Элементарные СлП между
собой, как правило, не
коррелированы, поэтому СКП суммарной
случайной погрешности в
соответствии с теоремой сложения дисперсий
теории вероятностей
рассчитывают по формуле
mсл = ( n
1
2
СЛj m )0,5 = (m2
Ш+m2
КП+m2
СП+m2
ДП+m2
СДП+…)0.5. (4.5)
Часто случайную погрешность представляют в
виде суммы высоко- и
низкочастотной составляющих, группируя
соответствующим образом
составляющие в выражении (4.5), и тогда
mсл=(m2
вч+m2
нч)0.5. В частности,
высокочастотная составляющая может
включать шумовую и
короткопериодную составляющие, тогда её
удобно назвать флюктуационной
погрешностью с СКП, равной mфл=(m2
Ш+m2
КП)0,5. На интервале времени
tН<0,25Т*СП суммы остальных
составляющих в (4.4) и (4.5) остаются
неизменными, поэтому эту сумму называют
постоянной СлП с СКП mпст.
Например, в таблице 4.1 приведены значения
элементарных радиальных
СКП М определения места судна по системе
GPS .
Таблица 4.1 –
Статистические показатели погрешностей GPS
при спокойной ионосфере
Код
сигнала
Параметр
Составляющая погрешности Полная
Фл Сп Дп Сдп РСКП МП
Р-код
M, м 1,5 2,6 1,5 2,0 4,0
τК, мин 0,5 1,6 15…55 5 ч 1,6 мин.(5 ч)
С/А-код M, м 15 — — —
35-15
τК, мин 0,5 — — — 2,2
Любой
Любой
Р-код
Закон распределения Лапласа со смещением к
экспоненц. Эксцесс Е=3,5
Автокоррел. функция ( )=exp(- |
|)cos ; =2 /Т*; Т*=24 ч
При возбуждённой ионосфере полная РСКП
МП=8…12 м за счёт МСдп
По таблице 4.1 можно увидеть, что в
погрешностях GPS выделяются
четыре элементарные погрешности. При
составлении таблицы 4.1 не
учитывалась погрешность, обусловленная
раскачиванием антенны
приёмоиндикатора на качке судна.
Систематической (Ст) погрешностью
(СтП) называют погрешность,
которая в данном ряде измерений на
промежутке времени наблюдений tН
остаётся постоянной или изменяется по
известному закону. СтП, как правило,
возникает, так же как и СлП, под действием
нескольких факторов, и включает
соответствующее число составляющих. СтП
измерения и выработки НП
исключаются из результатов измерений
разными способами. Поэтому
рассматривают неисключенные СтП
(неисключенные остатки СтП) –
составляющие СтП измерений, обусловленные
погрешностями определения,
вычисления и введения (учета) поправок на
влияние соответствующих
элементарных СтП. В ряде случаев в этом
смысле приходится рассматривать и
СтП, поправки на действие которых не
введены вследствие малости, либо
незнания закона изменения СтП, а также погрешности,
обусловленные
изменением введенных поправок во времени
и/или в пространстве.
Суммы всех отдельных неисключенных (или
остатков после исключения)
составляющих j СтП измерений, дают
границы неисключенной СтП
измерений НП (+Θ) и (-Θ), вычисляемые по
одной из формул (соответственно
для числа слагаемых n 3 и n>3) [ГОСТ
8.009-84. Нормируемые
метрологические характеристики. – М.:1988.
– 152 с.]:
Θ = ±
j
n
1 ; Θ = ± ( n
1
2
j )0,5 . (4.6)
Поправку Δj за j-ю элементарную СтП
определяют одним из двух
способов — экспериментальным или расчетным
(теоретическим). При первом
способе поправку стj и ее СКП m j
рассчитывают по формулам:
Стj=uэтj – uизмj; m j=(m2
этj+m2
измj)0,5, (4.7)
где uэтj и mэтj – эталонное значение для
j-й элементарной СтП и её СКП , uизмj и
mизмj– измеренное значение НП U и его
СКП..
Суммарную поправку и ее СКП определяют по
формулам:
Δст = n
1 СТj ; mΔ = ( n
1
m2
j)0,5. (4.8)
Если поправку вводят только по одной
элементарной составляющей, то в
выражениях (4.7) и (4.8) j=n=1.
В случае использования расчетного способа
поправку рассчитывают на
основании известного теоретического закона
её изменения. Примерами
являются полуавтоматический ввод
широтно-скоростной поправки в показания
гирокомпаса (ГК), (расчётный способ) и
определение по пеленгу удалённого
ориентира на стоянке судна постоянной
поправки ГК и её учёт при прокладке
курсов и пеленгов на карте
(экспериментальный способ).
4.3 . Полная погрешность. Грубые
погрешности НП
Судно в процессе плавания смещается с
заданной траектории его
движения (ЗТД) под действием случайных и
неисключённых или остаточных
систематических погрешностей МСН, а также
под воздействием факторов
(течения и ветра), которые вызывают снос
судна и имеют на
продолжительности счисления t=tС как
случайный, так и систематический
характер. При оценивании точности НП и
места судна должны быть учтены
все, и случайные, и систематические
погрешности и факторы.
Рандомизация СтП. Для обеспечения
возможности учета СтП и
систематически действующих факторов при
оценивании точности НП и места
судна используют свойство, или применяют
процедуру рандомизации СтП
[Бойков А. В., Катенин В. А., Михальский
В. А. Основы метрологического
обеспечения навигации. Монография – М.:
Альтаир – МГАВТ, 2009. – 434 с.].
Рандомизация (от random – случайный)
состоит в придании СтП (или
систематически действующему фактору)
свойства случайной погрешности.
Способы рандомизации систематических
погрешностей
а)Прежде всего, уже расчеты величины Θ по
(4.6) превращает сумму Θ
элементарных СтП Θj в случайную величину.
Действительно, величина +Θ или
–Θ представляет собой участок, в котором
находится истинное значение
погрешности Х при (в общем случае)
одинаковой вероятности для каждого
конкретного значения внутри участка.
Следовательно, величина Х является
равномерно распределенной случайной
величиной с СКП m2=Θ2/12.
б)Cлучайной становится СтП и при расчете
поправки по (4.7; 4.8).
в)Третий способ рандомизации заключается в
рассмотрении
совокупности систематических погрешностей
δстj=δj. Например, каждая j-я РЛС
с электрическими фазовращателями в канале
формирования излучаемого
импульса имеет СтП измерения дистанции δj,
обусловленную неточностью
начальной установки роторов
фазовращателей. Для каждой РЛС эта СтП может
быть определена (достаточно сложным
способом, связанным со специальным
маневрированием судна) и учитываться в
качестве поправки Δj=-δj при
измерениях дистанции, а может и не
определяться (что чаще всего и бывает на
практике). Если поправка не определяется,
то понижение точности измерения
дистанции должно быть учтено при
определении полной СКП измерения
дистанции. Для такого учета необходимо
определить n значений δj, например, в
процессе государственных испытаний (ГИ) n
первых образцов РЛС данного
типа, и затем, рассматривая совокупность
значений δj как выборку [x] (4.2)
значений случайной величины Х= ,
рассчитать СКП постоянной погрешности
измерения дистанции mпст (по формуле
Гаусса (4.1) при Мх=0). Впоследствии
величину mпст используют как одну из
характеристик точности измерения
дистанции для всех РЛС, изготовленных по
данной технологии.
г)Четвертый способ рандомизации основан на
использовании
специфических свойств погрешностей НП. Для
примера на рисунке 4.2
приведены графики изменения средних за 5
суток погрешностей в трёх каналах
РНС «Марс-75» при наблюдениях в течение 12
месяцев. Видно, что имеет
место сезонная составляющая погрешности НП
с периодом изменения, равным
12 месяцев. При навигационных измерениях в
течение ограниченного времени
(до 5 суток и более) эта погрешность
входит во все отсчеты выполненной серии
измерений НП с одной величиной и знаком и
является систематической. С
другой стороны, при наблюдениях в
продолжении нескольких лет она
представляет собой случайную погрешность с
характерным периодом, равным
12 месяцев. СКП mcз этой «сезонной»
составляющей полностью характеризует
и систематическую погрешность
кратковременных наблюдений. В этом случае
происходит естественная рандомизация
систематической погрешности.
В условиях, когда все не исключенные
составляющие СтП
рандомизированы, и известны их СКП mcтj,
СКП суммарной СтП рассчитывают
по формуле
mcт = ( n
1
m2
стj)0,5 (4.9)
Рисунок 4.2 – Графики изменения средних за
5 суток погрешностей НП в
системе «Марс-75» по наблюдениям за год
Полная погрешность навигационного
параметра. Полной
погрешностью НП называют погрешность,
включпющую все известные
существенные случайные и рандомизированные
систематические
составляющие. СКП полной погрешности
(полная СКП) равна сумме
mП=(m2
сл+m2
ст)0,5, (4.10)
где mсл и mст – суммарные случайная и
систематическая СКП, рассчитываемые
по (4.5) и (4.9). При решении задач НБП
должны использоваться только полные
СКП mП НП, и в том числе координат судна.
На практике обычно полную СКП,
используемую для решения задач, называют
просто средней квадратической
или стандартной погрешностью НП и
обозначают символом m или mU, если
нужно обозначить НП, к которому относится
СКП, например mГК – СКП
показаний гирокомпаса, mD – СКП измерения
дистанции. В других задачах
используются полные флюктуационные (фл),
или высокочастотные, и
постоянные (пст), или низкочастотные
погрешности, СКП которых равны:
mфл=(m2
сл__________,фл+m2
ст, фл)0,5, mпст=(m2
сл,пст+m2
ст,пст)0,5 (4.11)
где mст,фл – флюктуационная
систематическая СКП, которая складывается из
систематических элементарных погрешностей,
изменяющихся на интервале
наблюдений или обработки НП, например,
фильтрации НП; mст,пст – постоянная систематическая СКП, которая не изменяется
на интервале обработки НП.
Пример 4.2. Определены
СКП случайной и рандомизированной систематической погрешностей гирокомпасного
пеленга mсл=0,5о и mст=0,8о. Рассчитать полную СКП.
Решение. По формуле (4.10)
определяют mП=(0,52+0,82)0,5=0,9о. В данном случае, типичном для благоприятных
условий работы гирокомпаса, роль систематической погрешности значительно выше,
чем случайной, и систематическая погрешность является превалирующей, а
случайная – слабодействующей.
Грубые (необычно большие,
анормальные, экстремальные) погрешности. Анормальными для данного
ряда погрешностей в навигации называют погрешности, которые по величине
существенно превышают погрешности этого ряда, характеризуемые величиной полной
СКП m. По источникам происхождения грубые погрешности (ГП) можно подразделить
на аппаратурные и личностные. Аппаратурные погрешности возникают в МСН в
процессе измерений НП и их обработки под действием внешних или необычно
возросших внутренних помех, своевременно не обнаруженных неисправностей или
изменений условий работы МСН, а также вследствие естественных выбросов
погрешностей за установленный уровень, возникающих со случайной периодичностью.
Иногда ГП такого рода ассоциируются с нарушением информационной надежности МСН
[Дмитриев С. П., Колесов Н. В., Осипов А. В. Информационная надежность,
контроль и диагностика информационных систем. — СП6.: ГНЦ РФ ЦНИIИ
«Электроприбор», 2003. — 206 с.]. Особенностью аппаратурных ГП является
возможность их длительного присутствия в результатах измерений НП и в
результатах решения задач. Это повышает роль способов обнаружения таких
погрешностей с использованием избыточной и/или привлечением дополнительной
информации. Вероятностный критерий проверки отсутствия ГП в расхождении LНП
двух значений u1 и u2 одного и того же НП U, например, скорости судна, измеренной
лагом и по числу оборотов движителя, или невязки LС между счислимым и
обсервованным местама судна, имеет вид:
LНП=|(u1–u2)|<КР1qKLmL;
mL=(m21+m22–2r12m1m2)0,5, (4.12)
где LНП – расхождение значений НП u1 и u2;
KL специальный коэффициент, КР1q – коэффициент перехода к предельной
погрешности, рассматриваемый далее (предварительно в среднем можно считать
КР1q=КР1М=2,0); ; r12 – коэффициент корреляции, рассматриваемый далее. Если
r=0, то mL=(m21+m22)0,5. Упростим
выражение для mL в (4.12) с целью
облегчения практических расчётов. Для
этого обозначим в виде mМ и mБ меньшую и
большую из СКП m1 и m2 и
вынесем mМ за скобки:
mL=mМ(1+
2–2r )0,5=КзмmМ; =mБ/mМ, (4.13)
где Кзм – заместительный коэффициент,
значения которого приведены в
таблице 4.2.
Таблица 4.2 –
Значения заместительного коэффициента Кзм
r=0 r=0,2 r=0,5 r=0,8 r=0
r=0,2 r=0,5 r=0,8
1 1,41 1,26 1,0 0,63
2 2,24 2,05 1,73 1,34
1,1 1,49 1,33 1,05
0,67 2,5 2,69 2,5 2,14 1,8
1,2 1,45 1,4 1,11 0,72
3 3,16 2,97 2,65 2,28
1,3 1,64 1,47 1,18
0,78 3,5 3,64 3,44 3,12 2,77
1,4 1,72 1,55 1,25
0,85 4 4,12 3,92 3,61 3,26
1,5 1,8 1,63 1,32 0,92
4,5 4,61 4,41 4,09 3,75
1,6 1,89 1,71 1,4 1,0 5
5,1 4,9 4,58 4,24
1,7 1,97 1,79 1,48
1,08
1,8 2,07 1,88 1,56
1,17
1,9 2,15 1,96 1,65
1,25
2,0 2,24 2,05 1,73
1,34
Пример 4.3. А. Определить
СКП mL расхождения исправленных всеми поправками
показаний магнитного и гирокомпаса при
mГК=1о; mМК=3о; r=0.
Решение. 1) Вычисляют
значение отношения =mБ/mМ=3/1=3.
2) Выбирают из таблицы 4.1 значение коэффициента
Кзм=3,16.
3) Рассчитывают СКП mL=КзмmМ=3,16о.
Б. Определить
самостоятельно, на сколько изменилась бы величина mL при r=(0,2; 0,5
и 0,8) по сравнению с r=0. То же при
=1,5. [Ответы: при =3 на (6,0; 16.2; 27,8%);
при =1,5 на (9,1; 26,7 и 48,9*%) в
неблагоприятную сторону].
При обсервациях по нескольким ориентирам
на карте или дисплее
ЭКНИС образуется фигура погрешностей.
Проверку отсутствия ГП в одной из
линий положения (ЛП) выполняют способом
анализа периметра (Прм) самого
большого (или единственного) из
треугольников, составляющих фигуру
погрешностей, по критерию
Прм > Кпрм m*, (4.14)
где Кпрм – коэффициент, рассчитанный с
использованием закона распределения
периметра треугольника погрешностей для
уровня значимости =5%
(доверительной вероятности 0,95), значения
которого приведены в таблице 4.3;
m*=[(m2
ЛП1+m2
ЛП2+m2
ЛП3)/3]0,5; mЛПj – среднее значение СКП
линий положения.
При выполнении условия (4.14) считается,
что одна или две ЛП, образующие
треугольник, содержат ГП.
Таблица 4.3 –
Значения коэффициента Кпрм способа
периметра треугольника
Вид треу-
гольника
Любой Ориентиры со всех
сторон горизонта
Ориентиры с одной
стороны горизонта
Коэфф. r 0 0.4 0.8 0.4 0.8
Коэф. Кпр 12.5 15.9 19.4
11.6 8.8
Пример 4.4. А. При
определении места судна по пеленгам береговых ориентиров
образовался треугольник погрешностей,
периметр которого Пр=32 кбт. СКП линий
положения mj=(3,1; 2,8; 3,5) кбт;
коэффициент корреляции погрешностей ЛП rij=0,8;
ориентиры расположены в одной половине
горизонта. Проверить треугольник
погрешностей на отсутствие ГП.
Решение. 1)Рассчитывают
среднее значение СКП линий положения
m*=[(3,12+2,82+3,52)/3]0,5=3,1кбт.
2)Выбирают из таблицы 4.2 значение
Кпрм=8,8.
3)Проверяют условие (4.14). Поскольку
Пр=32>Кпрмm*=27,3 кбт, то это
свидетельствует о наличии в одной или двух
ЛП грубой погрешности с уровнем значимости
5%. Это значит, что с вероятностью 0,05
грубая погрешность может отсутствовать, а
большой треугольник образоваться
вследствие неудачного сочетания погрешностей.
Б. Решить самостоятельно
эту задачу для случаев расположения ориентиров по всему
горизонту и для коэффициента r=0, и
убедиться в следующем:
а)при расположении ориентиров со всех
сторон горизонта и других одинаковых
условиях фигуры погрешностей имеют
существенно большие размеры, чем когда ориентиры
находятся с одной стороны;
б)Пренебрежение коэффициентом корреляции
при расположении ориентиров со всех
сторон может привести к неверному
результату при оценке величины фигуры погрешностей
до 21…36%.
СКП функции. Выражение (4.12)
получено на основании теоремы о
дисперсии функции теории вероятностей,
которая в принятых нами
обозначениях формулируется следующим
образом. Если Y есть функция
нескольких случайных величин Y=φ(X1,…,
Xn), то СКП этой функции
выражается формулой
m m r
x x
m
x
m
i j ij
x
N
i
j
x
2
i
n
1
2
x
2
y
i
i j
j
i
i
2
,
(4.15)
где
i
x
—
частная производная величины Y по переменной Хi,
вычисленная при измеренном аргументе хi
(при этом ограничиваются первыми
(линейными) членами в разложении Тейлора);
rij — коэффициент корреляции
погрешностей хi и хj; символ i<j под
вторым знаком суммы обозначает, что
рассматриваются все парные сочетания
значений хi. Например, при n=3
рассматриваются сочетания х1 и х2, х1 и
х3, х2 и х3; N- количество этих
сочетаний. Выражение (4.15) иногда
называют теоремой о распространении
случайных погрешностей [Кондрашихин В. Т.
Теория ошибок и ее применение
к задачам судовождения. — М.: Транспорт,
1969. -256 с.].
Следствие из теоремы (4.15): если
случайная погрешность является
суммой n погоешностей i, характеризуемых
СКП mi, то m2
= nm2
i.
Личностные грубые ошибки (промахи) возникают
при ручных
измерениях, ручном решении и интерпретации
результатов ручного и
автоматического решения задач навигации.
Вероятность РГПЛ возникновения
грубых погрешностей в процессе ручных
расчетов подготовленным штурманом
зависит от сложности задачи и определяется
выражениями:
РГПЛ=0,0032NД, при NД≤50;
РГПЛ=0,1+0,00122NД, при 50<NД<350, (4.16)
где NД — количество элементарных действий,
выполняемых в процессе ручного
решения задачи, и характеризующее ее
сложность. Расчеты показывают, что
уже при NД=30 вероятность грубой ошибки
недопустимо велика РГПЛ=0,1.
Поэтому необходимо принимать специальные
меры для удержания вероятности
РГПЛ в пределах допускаемой величины,
например, РГПЛ<0,05, при которой
возникновение ошибки можно считать
событием практически невозможным. К
таким мерам относятся:
а)автоматизация решения сложных задач;
б)разработка и применение простых способов
решения задач навигации,
характеризуемых числом NД<10-15.
Большинство предлагаемых далее способов
решения задач удовлетворяет этому условию;
в)применение, в случае невозможности
обеспечения малого числа
действий, метода дублирования, состоящего
в производстве наблюдений и/или
вычислений дополнительными лицами и/или
способами;
г)применение способов проверки отсутствия
грубых ошибок в
результатах решения задач (вариант метода
дублирования).
.В случае двойного независимого
дублирования вероятность
прохождения грубой ошибки или погрешности
через систему обработки
информации равна, в соответствии с
теоремой умножения вероятностей теории
вероятностей, как известно
РГП = Р1Р2, (4.17)
где Р1 и Р2 — вероятности возникновения
грубых погрешностей в
каждом из дублирующих каналов измерения и/или
обработки инфломации.
Пример 4.5. Определить
вероятность промаха при расчётах времени наступления
полной воды и высоты прилива для
обеспечения прохода узкости с критическими
глубинами, если NД 30.
Решение. 1)Вычисляют по
(4.16) РГПЛ=0,0032NД= =0,003230 0,1.
2)Вероятность промаха слишком велика и
необходимо каким-либо способом
проверить полученный результат. В случае
повторнрго решения задачи другим
специалистом вероятность промаха у двух
специалистов по формуле (4.17) равна
РГП=Р2
ГПЛ=0,12=0,01.__
НАВИГАЦИОННЫЕ ИЗМЕРЕНИЯ
И ИХ ПОГРЕШНОСТИ
1. Основные термины и определения теории
погрешностей
Постановка задачи. Основной задачей навигации
является
обеспечение навигационной безопасности плавания (НБП)
и маневрирования
судна. Элементарный вариант прохождения судна мимо
навигационной
опасности на безопасном расстоянии Dбзп
представлен на рисунке 4.1
Рисунок 1.1 – Прохождение судна мимо одиночной
навигационной опасности.
Линию пути судна прокладывают так, чтобы минимальное
текущее
расстояние D до опасности не оказалось меньше
безопасного расстояния, т. е.
DDбзп.
Безопасное расстояние рассчитывают с учётом погрешностей
определения расстояния D. Чем лучше известны
свойства этих погрешностей,
тем правильнее будет рассчитано расстояние Dбзп
и качественнее решена задача
НБП. Навигационная метрология занимается изучением
свойств погрешностей
измерений величин, от которых зависит качество
расчётов величины Dбзп. Это
изучение начинается с терминов и определений,
применяемых в теории
погрешностей метрологии судовождения.
Терминология измерений. Рассматриваемые ниже
термины
базиоуются на основополагающих государственных
стандартах и справочниках
по метрологии [ГОСТ 8.009-84. Нормируемые
метрологические
характеристики. – М.:1988. – 152 с.// ГОСТ 16.263-70.
Метрология. Термины и
определения. –М.:1970.–54 с., и др.].
Параметр — величина,
характеризующая какое-либо свойство процесса,
явления, системы. В этом же смысле используют термины показатель,
характеристика.
Физическая величина —
свойство, общее в качественном отношении
многим физическим объектам, но индивидуальное для
каждого объекта в
количественном отношении. Координаты места судна,
элементы вектора его скорости и пройденного расстояния, все величины, измеряемые
морскими средствами навигации (МСН), являются физическими величинами и
называются навигационными величинами.
Значение величины – оценка
физической величины в виде некоторого числа принятых для нее единиц. Истинное
значение величины – значение, соответствующее идеальным образом в
количественном отношении свойствам объекта. Действительное значение величины
– значение, найденное экспериментальным путем и настолько приближающееся к
истинному значению, что для данной цели может быть использовано вместо него. Эталонное
значение величины – значение, найденное экспериментальным путем и
используемое вместо истинного с учетом того, что его точность не так велика,
чтобы погрешностью эталонного значения можно было пренебречь при его сравнении
с измеренным значением. Вероятнейшее (средневзвешенное) значение величины –
значение величины, рассчитанное по результатам нескольких (n) измерений
при условии максимума апостериорной плотности вероятности (в случае нормального
(гауссовского) распределения с этим условием совпадает минимум дисперсии).
Измерение – нахождение
значения физической величины опытным путем (с помощью специальных технических
средств). Иногда в этом же смысле используют термин выработка, например,
курса судна гирокомпасом. Отсчет (фиксация, измерение) — единичный
результат измерений. Реализация (серия, ряд, выборка) отсчетов –
несколько выполненных подряд с некоторым интервалом времени отсчетов одного и
того же параметра.
Наблюдение – более или менее
длительный и целенаправленный процесс производства измерений с регистрацией их
результатов (отсчётов).
Продолжительность наблюдений
(длительность, длина реализации) – промежуток времени от начала до
конца измерений.
Дискретность измерений (отсчетов,
фиксаций) –
временной (пространственный) интервал между последовательными отсчетами.
Длительность цикла измерений –
промежуток времени между началами двух реализаций, следующих одна за другой с
некоторым интервалом времени.
Прямые измерения – измерения,
выполняемые путем непосредственного сравнения измеряемой величины с единицей
измерений, например, измерение курсового угла объекта с помощью репитера
гирокомпаса. Косвенные
измерения – измерения, при
которых измеряемая величина рассчитывается как
функция одного или нескольких прямых измерений. В
большинстве МСН
реализован принцип косвенных измерений, например,
измерение глубины под
килем с помощью эхолота, когда напрямую измеряется
время распространения
сигнала. В ряде случаев получение результата при
косвенных измерениях
называют выработкой величины. Совокупные
измерения – такие измерения,
когда интересующие нас величины находят путем решения
системы уравнений,
в которые входят результаты измерений некоторых других
величин.
Координаты судна на выходе систем оптимальной
обработки информации
являются результатом совокупных измерений.
Дискретные (прерывные) измерения –
измерения, выполняемые с
некоторым интервалом времени (единиц пространства),
называемым
дискретностью измерений (временной
или пространственной).
Независимые (некоррелированные) измерения – измерения,
результаты
которых характеризуются нулевым или пренебрежимо малым
коэффициентом
взаимной корреляции. Коррелированные измерения –
измерения, результаты
которых характеризуются достаточно большим
коэффициентом взаимной
корреляции.
Терминология навигационных измерений. Навигационный
параметр
(НП) – физическая величина, характеризующая положение
(координаты места)
или перемещение судна в пространстве. Навигационный
параметр положения
– навигационный параметр, который является функцией
географических (или
других используемых в навигации) координат места судна
и навигационного
ориентира (ориентиров), и измеряется для определения
места судна.
Навигационный параметр
движения — величина, характеризующая направление
и/или скорость движения судна в заданной системе
координат.
Обсервованный навигационный параметр
положения —
измеренный с
помощью МСН определения места навигационный параметр
положения,
исправленный всеми соответствующими поправками. Обсервованное
место
(ОМ) судна – точка местоположения судна на земной
поверхности,
соответствующая двум или нескольким обсервованным НП
положения.
Счислимый (прогнозируемый) навигационный
параметр положения – НП
положения, полученный методом (или выработанный
системой)
относительного, абсолютного или инерциального
счисления. Счислимое
(прогнозируемое) место судна – точка
местоположения судна,
соответствующая двум счислимым НП положения. Счислимое
значение
обсервованного НП положения – значение
обсервованного НП в счислимом
(или обсервованном с помощью другого МСН) месте судна.
Обсервованный навигационный параметр
движения –
измеренный с
помощью МСН обсервации, (например, приёмоиндикатором
GPS) НП
движения, или же навигационный параметр движения,
полученный в процессе
обработки разновременных обсервованных координат
судна.
Навигационная изолиния — линия на
земной поверхности, все точки
которой соответствуют одному и тому же значению НП
положения.
Линия положения — отрезок прямой
линии, заменяющей навигационную
изолинию вблизи места судна.
Терминология погрешностей измерений. Погрешность
результата
измерения НП – отклонение
результата измерения (Uизм) от действительного
(истинного) значения (Uдст) измеряемого НП,
определяемое по формуле
δU=δ=X=Uизм–Uдст. В
литературе обычно погрешность обозначают символом Δ.
Однако в навигации этот же символ употребляется для
обозначения поправки, а
также приращения величины и разности двух величин.
Чтобы исключить
путаницу поправки с погрешностью, мы будем обозначать
погрешность
символом δ или Х, а погрешность,
рассматриваемую как случайная величина –
символами «X» или «Y». Конкретные
значения погрешностей будем обозначать
символами «x» или «y».
В зарубежной литературе величину δU=δ
обозначают также термином неопределённость,
который мы будем использовать при характеристике
степени неточности поправок и других величин
и методов решения задач.
Средняя квадратическая (или стандартная)
погрешность (СКП)
m
измерений – характеристика рассеяния погрешности
измеряемой величины
относительно её математического ожидания, равная корню
квадратному из
дисперсии D измеряемой случайной величины
(погрешности). СКП определяют
по опытным данным по формуле Бесселя с поправкой
Стьюдента (первая из
следующих ниже формул), или по формуле Гаусса (вторая
формула), если
известно математическое ожидание Mx или
истинное значение измеряемой
(случайной) величины Х [Абчук ___9._В. А.,
Матвейчук Ф. А., Томашевский Л,, П.
Справочник по исследованию операций.. — М.: Воениздат,
1979. — 368 с.]:
m=[ (xi–x*)2/(n–1,45)]0,5,
или m=[ (xi–Mx)2/n]0,5. (4.1)
В этих формулах (и далее): символ обозначает
суммирование по всем
i от 1 до n; х*= xi/n –
среднеарифметическое значение; 1,45 – элемент
Стьюдента, учитывающий низкую точность оценки СКП при
малом числе
измерений; n – количество измерений в выборке [x]
отсчётов случайной
величины (НП) Х
[x] = x1, …, xi, …, xn; i=1,
n (4.2)
Символами Х, Y, Z обозначают случайные
величины, символами х1, х2, …;
y1, y2, … –
их конкретные значения. На практике часто используют более
удобную для расчётов и программирования формулу
m = {[ x2
i – ( xi)2/n]/(n–1,45)}0,5
. (4.3)
Пример 4.1. Выполнено 5
измерений дистанции до одного и того же удалённого мыса: 218,53;
219,15; 220,21; 221,27; 219,43 кбт. Рассчитвть СКП
измерений дистанции в данных условиях.
Решение: по формуле (4.3)
рассчитываем
m={[241384,46 – (1206899,9)/5]/3,55}0,5=1,12 кбт.
Если использовать формулу Бесселя без поправки
Стьюдента, то есть иметь в знаменателе не
(n–1,45), а (n–1), то в результате
получим m’=0,9 кбт, т.е. СКП окажется на 19,6 20% меньше.
Читателю предлагается самостоятельно выполнить расчёты
по (4.1) и убедиться что при этом
трудоёмкость решения возрастает.
Абсолютная погрешность – погрешность
измерений, выраженная в
единицах измеряемой величины.
Относительная погрешность измерений –
погрешность измерений, выраженная
отношением абсолютной погрешности
измерений к действительному значению
измеряемой величины. Относительную
погрешность выражают в процентах.
Нормированная погрешность измерений –
погрешность измерений, выраженная
отношением абсолютной погрешности
измерений к значению стандартной
погрешности измеряемой величины.
Нормированную погрешность выражают в
единицах и долях СКП.
По источникам происхождения погрешности
навигационных измерений
подразделяются на аппаратурные
(инструментальные, приборные),
методические (погрешности метода измерений
и обработки их результатов),
субъективистские и погрешности,
возникающие вследствие отклонения
условий измерений от установленных, или
стандартных (в навигации обычно
наиболее важные, так как вызываются
воздействием природных факторов,
изменяющихся во времени и в пространстве).
Такие погрешности иногда
называют внешними. Каждый из этих видов
погрешностей может
подразделяться на подвиды в зависимости от
конкретных источников
возникновения погрешностей.
Элементарная погрешность измерений
(составляющая погрешности) –
погрешность измерений, обусловленная
воздействием конкретного фактора.
Элементарная СКП измерений – средняя
квадратическая погрешность
элементарной составляющей.
Полная погрешность измерений – погрешность
измерений, включающая в
себя все известные существенные
составляющие.
Полная СКП измерений – СКП полной
погрешности измерений.
По влиянию на полную погрешность
конкретные ее составляющие
подразделяются на превалирующие,
существенные и слабодействующие,
которыми при расчетах можно пренебречь по
малости их СКП. Обычно при
определении слабодействующих составляющих
руководствуются «правилом
трех сигм» и исключают из
рассмотрения составляющие, СКП которых не
превосходит одной трети (иногда одной
второй) полной СКП (рассчитанной без
учета рассматриваемых предположительно
слабодействующих составляющих).
Превалирующие погрешности – одна (иногда
две) элементарные погрешности,
характеризуемые наибольшими СКП среди всех
существенных элементарных
погрешностей, образующих полную
погрешность.
По характеру проявления погрешности
данного ряда навигационных
измерений подразделяются на случайные,
систематические и грубые
___¤___r_¤__(необычно большие,
экстремальные). Систематические для данного ряда
измерений погрешности могут быть
случайными в другом ряду, или наоборот.
Эти погрешности далее рассматриваются
более подробно.
По наличию внутренней корреляционной связи
погрешности
навигационных измерений подразделяются на
автокоррелированные и
неавтокоррелированные.
4.2 Случайные и систематические погрешности
навигационных
параметров
Случайной (Сл) погрешностью (СлП)
называют погрешность,
которая является случайной величиной и
может принять в результате опыта
то или иное значение, причём заранее
неизвестно, какое именно. СлП
измерений НП является в большинстве
случаев следствием действия одной –
двух основных и нескольких дополнительных
причин. Каждая j-ая причина
обусловливает свою составляющую СлП δслj,
иногда называемую
элементарной СлП. Поэтому СлП
представляет собой сумму всех случайных
элементарных погрешностей. На основании
выполненного исследования
статистических моделей погрешностей разных
НП [Методики вероятностных
расчетов при решении навигационных задач
на кораблях и судах ВМФ (МВР-
96)./ Михальский В. А., Рябоконь В. А. –
СПб.: ГУНиО МО РФ, 1999. — 218 с.]
структуру случайных погрешностей НП для
общего случая можно
представить в виде суммы
n
CЛ 1 СЛj= Ш + КП + СП +
ДП + СДП +…, (4.4)
где n — количество составляющих
(элементарных погрешностей); Ш –
шумовая; КП — короткопериодная; СП —
среднепериодная; ДП —
долгопериодная; СДП – сверхдолгопериодная
составляющие. В конкретных
случаях некоторые из этих составляющих
могут отсутствовать, и теоретически
возможно присутствие дополнительных
составляющих. Если хотят
подчеркнуть, что в число n входят все
существенные элементарные
погрешности, то величину δсл называют
полной, или суммарной случайной
погрешностью. Элементарные СлП между
собой, как правило, не
коррелированы, поэтому СКП суммарной
случайной погрешности в
соответствии с теоремой сложения дисперсий
теории вероятностей
рассчитывают по формуле
mсл = ( n
1
2
СЛj m )0,5 = (m2
Ш+m2
КП+m2
СП+m2
ДП+m2
СДП+…)0.5. (4.5)
Часто случайную погрешность представляют в
виде суммы высоко- и
низкочастотной составляющих, группируя
соответствующим образом
составляющие в выражении (4.5), и тогда
mсл=(m2
вч+m2
нч)0.5. В частности,
высокочастотная составляющая может
включать шумовую и
короткопериодную составляющие, тогда её
удобно назвать флюктуационной
погрешностью с СКП, равной mфл=(m2
Ш+m2
КП)0,5. На интервале времени
tН<0,25Т*СП суммы остальных
составляющих в (4.4) и (4.5) остаются
неизменными, поэтому эту сумму называют
постоянной СлП с СКП mпст.
Например, в таблице 4.1 приведены значения
элементарных радиальных
СКП М определения места судна по системе
GPS .
Таблица 4.1 –
Статистические показатели погрешностей GPS
при спокойной ионосфере
Код
сигнала
Параметр
Составляющая погрешности Полная
Фл Сп Дп Сдп РСКП МП
Р-код
M, м 1,5 2,6 1,5 2,0 4,0
τК, мин 0,5 1,6 15…55 5 ч 1,6 мин.(5 ч)
С/А-код M, м 15 — — —
35-15
τК, мин 0,5 — — — 2,2
Любой
Любой
Р-код
Закон распределения Лапласа со смещением к
экспоненц. Эксцесс Е=3,5
Автокоррел. функция ( )=exp(- |
|)cos ; =2 /Т*; Т*=24 ч
При возбуждённой ионосфере полная РСКП
МП=8…12 м за счёт МСдп
По таблице 4.1 можно увидеть, что в
погрешностях GPS выделяются
четыре элементарные погрешности. При
составлении таблицы 4.1 не
учитывалась погрешность, обусловленная
раскачиванием антенны
приёмоиндикатора на качке судна.
Систематической (Ст) погрешностью
(СтП) называют погрешность,
которая в данном ряде измерений на
промежутке времени наблюдений tН
остаётся постоянной или изменяется по
известному закону. СтП, как правило,
возникает, так же как и СлП, под действием
нескольких факторов, и включает
соответствующее число составляющих. СтП
измерения и выработки НП
исключаются из результатов измерений
разными способами. Поэтому
рассматривают неисключенные СтП
(неисключенные остатки СтП) –
составляющие СтП измерений, обусловленные
погрешностями определения,
вычисления и введения (учета) поправок на
влияние соответствующих
элементарных СтП. В ряде случаев в этом
смысле приходится рассматривать и
СтП, поправки на действие которых не
введены вследствие малости, либо
незнания закона изменения СтП, а также погрешности,
обусловленные
изменением введенных поправок во времени
и/или в пространстве.
Суммы всех отдельных неисключенных (или
остатков после исключения)
составляющих j СтП измерений, дают
границы неисключенной СтП
измерений НП (+Θ) и (-Θ), вычисляемые по
одной из формул (соответственно
для числа слагаемых n 3 и n>3) [ГОСТ
8.009-84. Нормируемые
метрологические характеристики. – М.:1988.
– 152 с.]:
Θ = ±
j
n
1 ; Θ = ± ( n
1
2
j )0,5 . (4.6)
Поправку Δj за j-ю элементарную СтП
определяют одним из двух
способов — экспериментальным или расчетным
(теоретическим). При первом
способе поправку стj и ее СКП m j
рассчитывают по формулам:
Стj=uэтj – uизмj; m j=(m2
этj+m2
измj)0,5, (4.7)
где uэтj и mэтj – эталонное значение для
j-й элементарной СтП и её СКП , uизмj и
mизмj– измеренное значение НП U и его
СКП..
Суммарную поправку и ее СКП определяют по
формулам:
Δст = n
1 СТj ; mΔ = ( n
1
m2
j)0,5. (4.8)
Если поправку вводят только по одной
элементарной составляющей, то в
выражениях (4.7) и (4.8) j=n=1.
В случае использования расчетного способа
поправку рассчитывают на
основании известного теоретического закона
её изменения. Примерами
являются полуавтоматический ввод
широтно-скоростной поправки в показания
гирокомпаса (ГК), (расчётный способ) и
определение по пеленгу удалённого
ориентира на стоянке судна постоянной
поправки ГК и её учёт при прокладке
курсов и пеленгов на карте
(экспериментальный способ).
4.3 . Полная погрешность. Грубые
погрешности НП
Судно в процессе плавания смещается с
заданной траектории его
движения (ЗТД) под действием случайных и
неисключённых или остаточных
систематических погрешностей МСН, а также
под воздействием факторов
(течения и ветра), которые вызывают снос
судна и имеют на
продолжительности счисления t=tС как
случайный, так и систематический
характер. При оценивании точности НП и
места судна должны быть учтены
все, и случайные, и систематические
погрешности и факторы.
Рандомизация СтП. Для обеспечения
возможности учета СтП и
систематически действующих факторов при
оценивании точности НП и места
судна используют свойство, или применяют
процедуру рандомизации СтП
[Бойков А. В., Катенин В. А., Михальский
В. А. Основы метрологического
обеспечения навигации. Монография – М.:
Альтаир – МГАВТ, 2009. – 434 с.].
Рандомизация (от random – случайный)
состоит в придании СтП (или
систематически действующему фактору)
свойства случайной погрешности.
Способы рандомизации систематических
погрешностей
а)Прежде всего, уже расчеты величины Θ по
(4.6) превращает сумму Θ
элементарных СтП Θj в случайную величину.
Действительно, величина +Θ или
–Θ представляет собой участок, в котором
находится истинное значение
погрешности Х при (в общем случае)
одинаковой вероятности для каждого
конкретного значения внутри участка.
Следовательно, величина Х является
равномерно распределенной случайной
величиной с СКП m2=Θ2/12.
б)Cлучайной становится СтП и при расчете
поправки по (4.7; 4.8).
в)Третий способ рандомизации заключается в
рассмотрении
совокупности систематических погрешностей
δстj=δj. Например, каждая j-я РЛС
с электрическими фазовращателями в канале
формирования излучаемого
импульса имеет СтП измерения дистанции δj,
обусловленную неточностью
начальной установки роторов
фазовращателей. Для каждой РЛС эта СтП может
быть определена (достаточно сложным
способом, связанным со специальным
маневрированием судна) и учитываться в
качестве поправки Δj=-δj при
измерениях дистанции, а может и не
определяться (что чаще всего и бывает на
практике). Если поправка не определяется,
то понижение точности измерения
дистанции должно быть учтено при
определении полной СКП измерения
дистанции. Для такого учета необходимо
определить n значений δj, например, в
процессе государственных испытаний (ГИ) n
первых образцов РЛС данного
типа, и затем, рассматривая совокупность
значений δj как выборку [x] (4.2)
значений случайной величины Х= ,
рассчитать СКП постоянной погрешности
измерения дистанции mпст (по формуле
Гаусса (4.1) при Мх=0). Впоследствии
величину mпст используют как одну из
характеристик точности измерения
дистанции для всех РЛС, изготовленных по
данной технологии.
г)Четвертый способ рандомизации основан на
использовании
специфических свойств погрешностей НП. Для
примера на рисунке 4.2
приведены графики изменения средних за 5
суток погрешностей в трёх каналах
РНС «Марс-75» при наблюдениях в течение 12
месяцев. Видно, что имеет
место сезонная составляющая погрешности НП
с периодом изменения, равным
12 месяцев. При навигационных измерениях в
течение ограниченного времени
(до 5 суток и более) эта погрешность
входит во все отсчеты выполненной серии
измерений НП с одной величиной и знаком и
является систематической. С
другой стороны, при наблюдениях в
продолжении нескольких лет она
представляет собой случайную погрешность с
характерным периодом, равным
12 месяцев. СКП mcз этой «сезонной»
составляющей полностью характеризует
и систематическую погрешность
кратковременных наблюдений. В этом случае
происходит естественная рандомизация
систематической погрешности.
В условиях, когда все не исключенные
составляющие СтП
рандомизированы, и известны их СКП mcтj,
СКП суммарной СтП рассчитывают
по формуле
mcт = ( n
1
m2
стj)0,5 (4.9)
Рисунок 4.2 – Графики изменения средних за
5 суток погрешностей НП в
системе «Марс-75» по наблюдениям за год
Полная погрешность навигационного
параметра. Полной
погрешностью НП называют погрешность,
включпющую все известные
существенные случайные и рандомизированные
систематические
составляющие. СКП полной погрешности
(полная СКП) равна сумме
mП=(m2
сл+m2
ст)0,5, (4.10)
где mсл и mст – суммарные случайная и
систематическая СКП, рассчитываемые
по (4.5) и (4.9). При решении задач НБП
должны использоваться только полные
СКП mП НП, и в том числе координат судна.
На практике обычно полную СКП,
используемую для решения задач, называют
просто средней квадратической
или стандартной погрешностью НП и
обозначают символом m или mU, если
нужно обозначить НП, к которому относится
СКП, например mГК – СКП
показаний гирокомпаса, mD – СКП измерения
дистанции. В других задачах
используются полные флюктуационные (фл),
или высокочастотные, и
постоянные (пст), или низкочастотные
погрешности, СКП которых равны:
mфл=(m2
сл__________,фл+m2
ст, фл)0,5, mпст=(m2
сл,пст+m2
ст,пст)0,5 (4.11)
где mст,фл – флюктуационная
систематическая СКП, которая складывается из
систематических элементарных погрешностей,
изменяющихся на интервале
наблюдений или обработки НП, например,
фильтрации НП; mст,пст – постоянная систематическая СКП, которая не изменяется
на интервале обработки НП.
Пример 4.2. Определены
СКП случайной и рандомизированной систематической погрешностей гирокомпасного
пеленга mсл=0,5о и mст=0,8о. Рассчитать полную СКП.
Решение. По формуле (4.10)
определяют mП=(0,52+0,82)0,5=0,9о. В данном случае, типичном для благоприятных
условий работы гирокомпаса, роль систематической погрешности значительно выше,
чем случайной, и систематическая погрешность является превалирующей, а
случайная – слабодействующей.
Грубые (необычно большие,
анормальные, экстремальные) погрешности. Анормальными для данного
ряда погрешностей в навигации называют погрешности, которые по величине
существенно превышают погрешности этого ряда, характеризуемые величиной полной
СКП m. По источникам происхождения грубые погрешности (ГП) можно подразделить
на аппаратурные и личностные. Аппаратурные погрешности возникают в МСН в
процессе измерений НП и их обработки под действием внешних или необычно
возросших внутренних помех, своевременно не обнаруженных неисправностей или
изменений условий работы МСН, а также вследствие естественных выбросов
погрешностей за установленный уровень, возникающих со случайной периодичностью.
Иногда ГП такого рода ассоциируются с нарушением информационной надежности МСН
[Дмитриев С. П., Колесов Н. В., Осипов А. В. Информационная надежность,
контроль и диагностика информационных систем. — СП6.: ГНЦ РФ ЦНИIИ
«Электроприбор», 2003. — 206 с.]. Особенностью аппаратурных ГП является
возможность их длительного присутствия в результатах измерений НП и в
результатах решения задач. Это повышает роль способов обнаружения таких
погрешностей с использованием избыточной и/или привлечением дополнительной
информации. Вероятностный критерий проверки отсутствия ГП в расхождении LНП
двух значений u1 и u2 одного и того же НП U, например, скорости судна, измеренной
лагом и по числу оборотов движителя, или невязки LС между счислимым и
обсервованным местама судна, имеет вид:
LНП=|(u1–u2)|<КР1qKLmL;
mL=(m21+m22–2r12m1m2)0,5, (4.12)
где LНП – расхождение значений НП u1 и u2;
KL специальный коэффициент, КР1q – коэффициент перехода к предельной
погрешности, рассматриваемый далее (предварительно в среднем можно считать
КР1q=КР1М=2,0); ; r12 – коэффициент корреляции, рассматриваемый далее. Если
r=0, то mL=(m21+m22)0,5. Упростим
выражение для mL в (4.12) с целью
облегчения практических расчётов. Для
этого обозначим в виде mМ и mБ меньшую и
большую из СКП m1 и m2 и
вынесем mМ за скобки:
mL=mМ(1+
2–2r )0,5=КзмmМ; =mБ/mМ, (4.13)
где Кзм – заместительный коэффициент,
значения которого приведены в
таблице 4.2.
Таблица 4.2 –
Значения заместительного коэффициента Кзм
r=0 r=0,2 r=0,5 r=0,8 r=0
r=0,2 r=0,5 r=0,8
1 1,41 1,26 1,0 0,63
2 2,24 2,05 1,73 1,34
1,1 1,49 1,33 1,05
0,67 2,5 2,69 2,5 2,14 1,8
1,2 1,45 1,4 1,11 0,72
3 3,16 2,97 2,65 2,28
1,3 1,64 1,47 1,18
0,78 3,5 3,64 3,44 3,12 2,77
1,4 1,72 1,55 1,25
0,85 4 4,12 3,92 3,61 3,26
1,5 1,8 1,63 1,32 0,92
4,5 4,61 4,41 4,09 3,75
1,6 1,89 1,71 1,4 1,0 5
5,1 4,9 4,58 4,24
1,7 1,97 1,79 1,48
1,08
1,8 2,07 1,88 1,56
1,17
1,9 2,15 1,96 1,65
1,25
2,0 2,24 2,05 1,73
1,34
Пример 4.3. А. Определить
СКП mL расхождения исправленных всеми поправками
показаний магнитного и гирокомпаса при
mГК=1о; mМК=3о; r=0.
Решение. 1) Вычисляют
значение отношения =mБ/mМ=3/1=3.
2) Выбирают из таблицы 4.1 значение коэффициента
Кзм=3,16.
3) Рассчитывают СКП mL=КзмmМ=3,16о.
Б. Определить
самостоятельно, на сколько изменилась бы величина mL при r=(0,2; 0,5
и 0,8) по сравнению с r=0. То же при
=1,5. [Ответы: при =3 на (6,0; 16.2; 27,8%);
при =1,5 на (9,1; 26,7 и 48,9*%) в
неблагоприятную сторону].
При обсервациях по нескольким ориентирам
на карте или дисплее
ЭКНИС образуется фигура погрешностей.
Проверку отсутствия ГП в одной из
линий положения (ЛП) выполняют способом
анализа периметра (Прм) самого
большого (или единственного) из
треугольников, составляющих фигуру
погрешностей, по критерию
Прм > Кпрм m*, (4.14)
где Кпрм – коэффициент, рассчитанный с
использованием закона распределения
периметра треугольника погрешностей для
уровня значимости =5%
(доверительной вероятности 0,95), значения
которого приведены в таблице 4.3;
m*=[(m2
ЛП1+m2
ЛП2+m2
ЛП3)/3]0,5; mЛПj – среднее значение СКП
линий положения.
При выполнении условия (4.14) считается,
что одна или две ЛП, образующие
треугольник, содержат ГП.
Таблица 4.3 –
Значения коэффициента Кпрм способа
периметра треугольника
Вид треу-
гольника
Любой Ориентиры со всех
сторон горизонта
Ориентиры с одной
стороны горизонта
Коэфф. r 0 0.4 0.8 0.4 0.8
Коэф. Кпр 12.5 15.9 19.4
11.6 8.8
Пример 4.4. А. При
определении места судна по пеленгам береговых ориентиров
образовался треугольник погрешностей,
периметр которого Пр=32 кбт. СКП линий
положения mj=(3,1; 2,8; 3,5) кбт;
коэффициент корреляции погрешностей ЛП rij=0,8;
ориентиры расположены в одной половине
горизонта. Проверить треугольник
погрешностей на отсутствие ГП.
Решение. 1)Рассчитывают
среднее значение СКП линий положения
m*=[(3,12+2,82+3,52)/3]0,5=3,1кбт.
2)Выбирают из таблицы 4.2 значение
Кпрм=8,8.
3)Проверяют условие (4.14). Поскольку
Пр=32>Кпрмm*=27,3 кбт, то это
свидетельствует о наличии в одной или двух
ЛП грубой погрешности с уровнем значимости
5%. Это значит, что с вероятностью 0,05
грубая погрешность может отсутствовать, а
большой треугольник образоваться
вследствие неудачного сочетания погрешностей.
Б. Решить самостоятельно
эту задачу для случаев расположения ориентиров по всему
горизонту и для коэффициента r=0, и
убедиться в следующем:
а)при расположении ориентиров со всех
сторон горизонта и других одинаковых
условиях фигуры погрешностей имеют
существенно большие размеры, чем когда ориентиры
находятся с одной стороны;
б)Пренебрежение коэффициентом корреляции
при расположении ориентиров со всех
сторон может привести к неверному
результату при оценке величины фигуры погрешностей
до 21…36%.
СКП функции. Выражение (4.12)
получено на основании теоремы о
дисперсии функции теории вероятностей,
которая в принятых нами
обозначениях формулируется следующим
образом. Если Y есть функция
нескольких случайных величин Y=φ(X1,…,
Xn), то СКП этой функции
выражается формулой
m m r
x x
m
x
m
i j ij
x
N
i
j
x
2
i
n
1
2
x
2
y
i
i j
j
i
i
2
,
(4.15)
где
i
x
—
частная производная величины Y по переменной Хi,
вычисленная при измеренном аргументе хi
(при этом ограничиваются первыми
(линейными) членами в разложении Тейлора);
rij — коэффициент корреляции
погрешностей хi и хj; символ i<j под
вторым знаком суммы обозначает, что
рассматриваются все парные сочетания
значений хi. Например, при n=3
рассматриваются сочетания х1 и х2, х1 и
х3, х2 и х3; N- количество этих
сочетаний. Выражение (4.15) иногда
называют теоремой о распространении
случайных погрешностей [Кондрашихин В. Т.
Теория ошибок и ее применение
к задачам судовождения. — М.: Транспорт,
1969. -256 с.].
Следствие из теоремы (4.15): если
случайная погрешность является
суммой n погоешностей i, характеризуемых
СКП mi, то m2
= nm2
i.
Личностные грубые ошибки (промахи) возникают
при ручных
измерениях, ручном решении и интерпретации
результатов ручного и
автоматического решения задач навигации.
Вероятность РГПЛ возникновения
грубых погрешностей в процессе ручных
расчетов подготовленным штурманом
зависит от сложности задачи и определяется
выражениями:
РГПЛ=0,0032NД, при NД≤50;
РГПЛ=0,1+0,00122NД, при 50<NД<350, (4.16)
где NД — количество элементарных действий,
выполняемых в процессе ручного
решения задачи, и характеризующее ее
сложность. Расчеты показывают, что
уже при NД=30 вероятность грубой ошибки
недопустимо велика РГПЛ=0,1.
Поэтому необходимо принимать специальные
меры для удержания вероятности
РГПЛ в пределах допускаемой величины,
например, РГПЛ<0,05, при которой
возникновение ошибки можно считать
событием практически невозможным. К
таким мерам относятся:
а)автоматизация решения сложных задач;
б)разработка и применение простых способов
решения задач навигации,
характеризуемых числом NД<10-15.
Большинство предлагаемых далее способов
решения задач удовлетворяет этому условию;
в)применение, в случае невозможности
обеспечения малого числа
действий, метода дублирования, состоящего
в производстве наблюдений и/или
вычислений дополнительными лицами и/или
способами;
г)применение способов проверки отсутствия
грубых ошибок в
результатах решения задач (вариант метода
дублирования).
.В случае двойного независимого
дублирования вероятность
прохождения грубой ошибки или погрешности
через систему обработки
информации равна, в соответствии с
теоремой умножения вероятностей теории
вероятностей, как известно
РГП = Р1Р2, (4.17)
где Р1 и Р2 — вероятности возникновения
грубых погрешностей в
каждом из дублирующих каналов измерения и/или
обработки инфломации.
Пример 4.5. Определить
вероятность промаха при расчётах времени наступления
полной воды и высоты прилива для
обеспечения прохода узкости с критическими
глубинами, если NД 30.
Решение. 1)Вычисляют по
(4.16) РГПЛ=0,0032NД= =0,003230 0,1.
2)Вероятность промаха слишком велика и
необходимо каким-либо способом
проверить полученный результат. В случае
повторнрго решения задачи другим
специалистом вероятность промаха у двух
специалистов по формуле (4.17) равна
РГП=Р2
ГПЛ=0,12=0,01.__
аварп. Таким чином, аваршна емгая на даному об’-екл може призвести до тяжких наслiдкiв.
На зашнчення вiдзначимо, що розрахунок за-вдання займае 5 секунд комп’ютерного часу.
Висновки
1. Запропоновано чисельну модель для оцшки аварiйного забруднення
2. Створено пакет прикладних програм, що до-зволяе прогнозувати рiвень забруднення атмосфери при аваршнш емюп амiаку.
3. Виконано прогноз ризику ураження людей в с. Башмачка у випадку аварп на насоснiй станцп, що перекачуе амiак.
Подальший розвиток дано! модел1 слiд прово-дити в напрямку створення чисельно! модел1, що доповнюеться рiвняннями аеродинамiки, щоб прогнозувати вплив будiвель на формування локаль-них зон забруднення атмосфери.
Список використаних джерел
1. Басманов А. Е. Зонирование местности в районе непрерывно действующего источника опасного химического вещества / А. Е. Басманов, С. С. Говаленков, М. В. Васильев // Проблеми надзвичай-них ситуацш : зб. наук. пр. — Харшв : Нац. ун-т ци-вшьного захисту Укра!ни, 2011. — Вип. 13. — С. 2033.
2. Заказнов В.Ф., Куршева Л. А. Распространение аммиака при разгерметизации аммиакопро-вода, емкостей // Исследования и разработки по созданию магистральных аммиакопроводов и складов жидкого аммиака. Труды ГИАП, М. 1985. -с.57.
3. Численное моделирование распространения загрязнения в окружающей среде / М. З. Згуров-ский, В. В. Скопецкий, В. К. Хрущ, Н. Н. Беляев. -Ки!в : Наук. думка, 1997. — 368 с.
4. Amelina L.V. Reducing ammonia concentrations in atmosphere after its unplanned release / L.V. Amelina, M.M. BiliaievP.B. Mashykhina // Наука та прогрес транспорту. Вюн. Дншропетр. нац. ун-ту
3am3H. TpaHcn. iM. aKag. B. ,Ha3apaHa. — ,3,mnpo : ,3,HmponeTp. нaц. yH-T 3am3H. TpaHcn. iM. aKag. B. Ha3apaHa, 2017. — Bun. 4 (70). — C. 16-22.
5. Amelina L.V. Numerical simulation of air pollution in case of unplanned ammonia release / L.V. Amelina, M.M. Biliaiev// HayKa Ta nporpec TpaHcnopTy. BicH. ^HinponeTp. Haq. yH-Ty 3am3H. TpaHcn. iM. aKag. B. Ha3apaHa. — flmnpo : ^HinponeTp. нaц. yH-T 3am3H. TpaHcn. iM. aKag. B. Ha3apaHa, 2017. — Bun. 3 (69). — C. 7-14.
6. Biliaiev M. The Numeric Forecast of Air Pollution Caused by a Blasting Accident in the Enterprise Responsible for Rocket Fuel Utilization in Ukraine / M. Biliaiev, M. Kharitonov // Disposal of Dangerous Chemicals in Urban Areas and Mega Cities. Proceedings of the NATO Advanced Research Workshop. -Springer, 2013. — P. 313-327.
7. Daly, A & Zannetti, Paolo & Jennings, M. (2013). Accident reconstruction and plume modeling of an unplanned ammonia release. AIR POLLUTION, 174, 2013. P. 3-13. 10.2495/AIR130011.
8. Dispersion Modeling of Hydrogen Sulfide at Cimarex Rands Butte Project Using ALOHA. Bureau of Land Management Pinedale Field Office. SWCA Environmental Consultants 1043 Coffeen Avenue, Suite D Sheridan, Wyoming 82801. January 2010. -26 p. www.swca.com.
9. Janos T. Atmospheric spreading model for ammonia released from the poultry house / T. Janos, E. Gorliczay, J. Borbely // Analele University din Ora-dea, Fascicula: Ecotoxicologie, Zootehnie si Tehnologii de Industrie Alimentara, Vol. XV/B Anul15, 2016. — pp. 331-338.
10. Bruyatskiy, Ye. V., 2000. Atmosphere diffusion theory of radioactive emissions. Institufe of hydromechanics NAS of Ukraine, Kyiv.
11. Effectiveness of Urban Shelter-in-Place II: Residental Districts / Wanyu R. Chan, William W. Nazaroff, Phillip N. Price, Ashok J. Gadgil // Atmospheric Environment . — 2007. — Vol. 41, iss.33. — P. 7082-7085.
Vorokhobin I.I.
PhD, associate professor,
National University «Odessa Maritime Academy»
VERIFICATION OF STATISTICAL HYPOTHESES OF DISTRIBUTING OF ERRORS OF MEASURING OF NAVIGATION PARAMETERS
Ворохобин Игорь Игоревич
кандидат технических наук, декан факультета МПиТ, Национальный университет «Одесская морская академия «
ПРОВЕРКА СТАТИСТИЧЕСКИХ ГИПОТЕЗ РАСПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ
Summary: The results of verification of static hypotheses of 12 selections of errors of the navigation measuring are resulted and it is shown that two selections contain errors which submit to the normal law, and the errors of the other selections are distributed on the mixed laws of both types. In the last eight selections of error of measurings it is possible to describe by the generalized law of Puasson, consent of selections of which comparably with the mixed laws.
! !■
12 Wschodnioeuropejskie Czasopismo Naukowe (East European Scientific Journal) #4(44), 2019 SMI Аннотация: Приведены результаты проверки статических гипотез 12-ти выборок погрешностей навигационных измерений и показано, что две выборки содержат погрешности, которые подчиняются нормальному закону, а погрешности остальных выборок распределены по смешанным законам обоих типов. В последних восьми выборках погрешности измерений можно описать с помощью обобщенного закона Пуассона, согласие выборок которых сопоставимо со смешанными законами.
Keywords: navigation accident rate, errors of the navigation measuring, statistical hypotheses, selections of errors.
Ключевые слова: навигационная аварийность, погрешности навигационных измерений, статистические гипотезы, выборки погрешностей.
Постановка проблемы.
В последнее время во многих случаях при обработке статистических данных погрешностей навигационных измерений, полученных в натурных наблюдениях, обнаружено, что они не подчиняются нормальному закону. Это обстоятельство повело к поиску альтернативных законов распределения вероятностей погрешностей навигационных измерений, в качестве которых предложены смешанные законы двух типов, причем их плотность распределения выражается в элементарных функциях.
Для подтверждения правомерности использования смешанных законов распределения вероятностей погрешностей необходимо проведение натурных наблюдений, результатам которого посвящена данная статья.
Анализ последних достижений и публикаций.
Вопросы повышения точности определения места судна освещены во многих работах отечественных и зарубежных ученых. В работах [2, 3] рассматриваются вопросы законов распределения вероятностей погрешностей навигационной измерений исходной выборки, которая является смесью частных выборок нормально распределенных погрешностей с разной дисперсией. Предложена процедура оценки эффективности обсервованных координат судна с учетом смешанных распределений погрешностей исходной выборки.
В работе [1] представлены результаты анализа статистических материалов точности определения места судна с помощью приёмника спутниковой радионавигационной системы, которые показали, что предположение о распределении случайных погрешностей определения широты и долготы по закону Гаусса не является корректным и требует альтернативного подхода.
Анализ выборок случайных погрешностей измерений навигационных параметров произведен в работе [6] и показано, что наибольшее согласие статистического материала с теоретическим распределением достигается для законов, отличающихся от нормального закона.
Анализ статистических данных погрешностей навигационных измерений представлен в работах [4, 5], который показал, что погрешности навигационных измерений, полученные в натурных наблюдениях, не подчиняются нормальному закону распределения.
В работах [7, 8] показано, что применение метода наименьших квадратов для расчета обсервованных координат судна не обеспечивает возможности получения их эффективных оценок. Поэтому для получения эффективных оценок обсервован-ных координат судна следует использовать метод максимального правдоподобия, учитывающий действительный закон распределения погрешностей.
Выделение нерешенных ранее частей общей проблемы.
Так как в рассмотренных работах указывается, что погрешности навигационных измерений могут быть распределенные не только по нормальному закону и теоретически получены смешанные законы первого и второго типа, то возникает необходимость проверки гипотезы о возможности распределения погрешности измерений по альтернативным законам с помощью экспериментальных данных.
Поэтому были проведены натурные наблюдения во время рейса судна, результаты которых приведены в данной статье.
Цель статьи.
Целью статьи является проверки гипотезы о возможности распределения погрешности измерений по смешанным законам первого и второго типа, а также обобщенному закону Пуассона с помощью экспериментальных данных.
Изложение основного материала.
С целью проверки возможности применения смешанных законов обоих типов для описания распределения погрешностей измерения навигационных параметров в реальных условиях эксплуатации были проведены натурные наблюдения. Для формирования исходных выборок погрешностей измерения навигационных параметров производились серии измерения навигационных параметров количеством более 100 измерений. Измерения навигационных параметров производились на стоянке судна, причем с помощью РЛС измерялись дистанция и пеленг на неподвижный ориентир, а с помощью приемника спутниковой навигационной системы GPS фиксировались широта и долгота судна.
Измерения производились в трех портах: Мор-мугао (Индия), Ричардс Бей (ЮАР) и Дакар (Сенегал). Последовательность измерений была следующей. Вначале измерялись пеленг и дистанция до ориентира, записывались их значения, а затем отсчеты РЛС сбивались. После этого фиксировались координаты судна. Операция повторялась через некоторый интервал времени. Интервал времени про-
изведения всех измерений планировался таким образом, чтобы в порту Мормугао он был наименьшим (около 7 часов, 150 измерений), в порту Ричардс Бей измерения производились в течение суток (210 измерений), а в порту Дакар — в течение двух суток (250 измерений). Различная длительность и число измерений планировалось для выявления влияния фактора времени на погрешности измерений.
Таким образом, в каждом порту были получены 4 серии измерений навигационных параметров, а в течении рейса 12 серий измерений. Для каждой серии измерений определяли среднее значение навигационного параметра и рассчитывали значения погрешностей измерений, которые в совокупности представляли выборку погрешностей. Стандартной процедурой [9] рассчитывались дисперсия и среднее квадратическое отклонение погрешности каждой выборки. Характеристики каждой из выборок приведены в табл. 1.
Таблица 1.
Порт Навигацион. параметр Число измерений Среднее значен. Дисперсия Б С. к. о.с
Мормугао пеленг 150 350,63° 0,173 0,415° = 24,9′
Мормугао дистанция 150 0.1526 мм 5,85 2,42 м
Мормугао широта 150 15°24′. 1865 N 33,84 5,82 м
Мормугао долгота 150 73°48′. 4980 Е 40,46 6,36 м
Ричардс Бей пеленг 210 217,41° 0,222 0,47° = 28,3′
Ричардс Бей дистанция 210 0.3378 мм 19,7 4,44 м
Ричардс Бей широта 210 28°49′. 1005 8 47,13 6,87 м
Ричардс Бей долгота 210 32°02′. 8950 Е 44,4 6,67 м
Дакар пеленг 250 122,21° 0,246 0,496° = 29,76′
Дакар дистанция 250 0.1206 мм 5,68 2,38 м
Дакар широта 250 14°41′. 0030 N 38,11 6,17 м
Дакар долгота 250 17°25′. 4313 W 39,84 6,31 м
В дальнейшем по каждой выборке строится гистограмма и производится проверка статистических гипотез [9], в процессе которой определяется степень согласия статистического материала выборки с выбранными законами распределения вероятностей погрешностей.
В качестве альтернативных законов были выбраны нормальный закон и смешанные законы первого и второго типа, аналитический вид которых приведен в табл. 2.
Таблица 2.
Альтернативные законы распределения вероятностей погрешностей
Закон распределения Аналитические выражения плотности
Гаусса 1 , х2 Л г— ехр(- 2) л!2жа 2о
Смешанный 1-го типа п=1 3 2а2 1 42ж (х2/2 + а)2
Смешанный 1 -го типа п=2 5 8а2 1 42л3 (х2/2 + а)3
Смешанный 1 -го типа п=3 7 48а2 1 42ж15 (х2/2 + а)4
Смешанный 1 -го типа n=4 9 384а2 1 л/2^105 (x2/2 + а)5
Смешанный 1 -го типа n=5 11 384Са2 1 л/2^945 (x2/2 + а)6
Смешанный 1 -го типа n=6 13 46080а2 1 V2^10395 (x2/2 + а)7
Смешанный 2-го типа n=1 3а2 1 л/24 (x2/2 + а)5/2
Смешанный 2-го типа n=2 15а3 1 (x 2 / 2 + а)7/2
Смешанный 2-го типа n=3 105а4 1 ^96 (x 2/2 + а)9/2
Смешанный 2-го типа n=4 945а5 1 ^768 (x 2/2 + а)11/2
Смешанный 2-го типа n=5 10395а6 1 ^7680 (x 2/2 + а)13’2
Для каждой выборки рассчитывались значения 2
критерия согласия % — Пирсона с рассмотренными законами распределения вероятностей погрешностей, и в качестве закона распределения вы-
2
бирался тот, критерий согласия % — Пирсона которого имеет минимальное значение.
В качестве примера приведем здесь характеристику первой выборки погрешностей измерения пеленга. Статистический ряд и выборка случайных погрешностей приведены в табл. 3. Во второй строке таблицы приводится число погрешностей, попадающих в соответствующий разряд. Число разрядов равно 12, причем длина каждого разряда равного половине значения с (с=24,9′).
Таблица 3.
Первая выборка погрешности измерения пеленга
Разряд
3
4
5
6
7
8
9
10
11
12
m
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
1
2
7
13
23
27
31
21
15
7
2
1
31,95, -27,55, -24,6, -20,6, -22,0, -19,3, -24,0, -14,90,
-68,0, -57,75, -50,45, -37,6, -40,7, -49,5, -39,5, -45,8, -43,3, -37,8, -30,15, -28,75, -29,45, -32,05, -31,15, -25,95, -30,95, -35,85, -31,65, -31,65,-32,25, -25,75, -13,2, -14,2, -21,6, -24,9, -24,1, -13,2, -19,0, -13,2, -16,4, -16,3, -22,1, -22,0, -14,0 -19,00, -15,00, -15,10, -5.65, -11,35, -10,75, -1,21, -5,95, -2.45, -2.95,
-10,25, -4,25, -0,15, -1,75, -1,05, -7,85, -5.45, -0,45, -9,25, -0,55, -2,15, -3,45, -4,95, -11,85, -2,25, -10,35, 4,65, -10,05, -12,45, -10,05, -12,45, -3,45, 8,30, 0,20, 3,80, 5,80, 4,30, 10,60, 7,80, 12,00, 10,30, 0,20, 8,70 3,00, 11,70, 2,30, 6,50, 3,40, 0,20, 7,50, 11,60, 10,00, 7,90, 4,80, 5,80, 0,50, 2,80, 3,30, 5,80, 4,50, 5,70 16,45 18,05, 15,25, 21,15, 21,55, 24,55, 21,15, 22,05, 17,85, 19,65, 18,75, 23,05, 15,15, 20,55, 16,75, 16,55, 22,35. 14,55, 24,75, 23,25, 21,45, 21,35, 29,30, 25,40, 27,80, 27,70, 31,60, 27,60,
30,30, 28,70, 32,80, 33,00, 58,40, 68,65.
30,10, 27,50, 32,60, 36,40, 38,95, 45,35, 47,65, 39,25, 39,15, 38,95, 46,05, 58,10,
1
2
Значения критерия согласия % — Пирсона для рассматриваемых законов распределения представлены в табл. 4.
Таблица 4.
2
Значения критерия согласия % — Пирсона первой выборки
N п/п Закон распределения 2 Критерий согласия % — Пирсона
1 Гаусса 0,0065
2 Смешанный 1 -го типа п=1 15,46
3 Смешанный 1 -го типа п=2 12,03
4 Смешанный 1-го типа п=3 12,28
5 Смешанный 1 -го типа п=4 13,01
6 Смешанный 1-го типа п=5 13,84
7 Смешанный 1 -го типа п=6 14,68
8 Смешанный 2-го типа п=1 12,59
9 Смешанный 2-го типа п=2 12,05
10 Смешанный 2-го типа п=3 12,62
11 Смешанный 2-го типа п=4 13,42
12 Смешанный 2-го типа п=5 14,26
Анализ таблицы показывает, что критерий согласия принимает минимальное значение для закона распределения Гаусса, поэтому принимается гипотеза о том, что погрешности распределены по нормальному закону.
Гистограмма первой выборки и кривая плотности распределения закона Гаусса представлены на рис.
1.
0,006
С =
/
К1 15,41 □т
к 2 12 ,о: 1
12 ,21 /
к 3 ЦТ зг
к 4 = 13,01 /
к 5 13 ,84 _Г
/
к 6 I 4,ОС /
Р1 12 ,5!
1
р 2 12 гг
р 3 = 12,62
р 4 13 ,41
5 = Щ
р 1 4,£С
гп:
/
/
/
у
124 100 75 50 25 0 2 5 Е 0 7 5 1 00 1
КозЫ
Критерии
124
Рис. 1. Гистограмма первой выборки
Результаты экспериментальных натурных наблюдений приведены в итоговой табл. 5. Анализ итоговой таблицы показывает, что погрешности измерения навигационных параметров (пеленга и дистанции), полученные на ограниченном интервале времени (7 часов), подчиняются нормальному закону распределения вероятностей.
Погрешности определения широты и долготы на том же интервале времени распределены по смешанным законам обоих типов. Это объясняется
тем, что координаты судна рассчитываются по навигационным параметрам (псевдорасстояниям) и погрешности результатов расчета, т. е. координат,
могут иметь распределение отличное от нормального, что показал и анализ третей и четвертой выборок.
Для восьми выборок с 5-й по 12-ю была произведена проверка гипотез о распределении их погрешностей по обобщенному закону Пуассона, для чего рассчитывалось значение критерия согласия
2
% — Пирсона для всех значений существенного параметра с.
Итоговые результаты
натурных наблюдений
Таблица 5.
N выборки Навигац. параметр Колич. членов Закон распред. %2 Длительн. наблюден.
1 пеленг 150 Гаусса 0,0065 7 часов
2 дистанция 150 Гаусса 0,006 7 часов
3 широта 150 1-го типа п=3 0,0131 7 часов
4 долгота 150 2-го типа п=1 0,015 7 часов
5 пеленг 210 1-го типа п=2 0,011 1 сутки
6 дистанция 210 2-го типа п=2 0,010 1 сутки
7 широта 210 1-го типа п=6 0,0094 1 сутки
8 долгота 210 1-го типа п=1 0,013 1 сутки
9 пеленг 250 2-го типа п=3 0,0088 2 суток
10 дистанция 250 1-го типа п=4 0,0088 2 суток
11 широта 250 1-го типа п=1 0,010 2 суток
12 долгота 250 2-го типа п=1 0,009 2 суток
Затем произвели сравнение для каждой из указанных выборок смешанный закон первого или второго
2
типа с минимальным значением критерия согласия % — Пирсона и обобщенный закон Пуассона из существенным параметром с, который обеспечивает минимальное значение критерия согласия, как показано в табл. 6.
Таблица 6.
N выборки Колич. членов Закон распред. %2 Пуассона %2 Длительн. наблюден.
5 210 1-го типа п=2 0,0126 0,0255 с=3,75 1 сутки
6 210 2-го типа п=2 0,0120 0,0167 с=3,75 1 сутки
7 210 1-го типа п=6 0,0106 0,0100 с=8,0 1 сутки
8 210 1-го типа п=1 0,014 0,1090 с=3,75 1 сутки
9 250 2-го типа п=3 0,0095 0,0103 с=4,00 2 суток
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
10 250 2-го типа п=3 0,0095 0,0103 с=4,25 2 суток
11 250 1-го типа п=1 0,011 0,1067 с=4,00 2 суток
12 250 2-го типа п=1 0,0103 0,0393 с=4,00 2 суток
Анализ заключительной табл. 6 показывает, что рассматриваемые выборки с высокой степенью вероятностей могут быть описаны как смешанными законами распределения, так и обобщенным законом Пуассона. При прочих равных условиях использование обобщенного закона Пуассона является предпочтительным, так как в случае зависимых погрешностей линий положения при
обобщенном законе Пуассона систему зависимых погрешностей можно преобразовать в соответствующую систему независимых погрешностей.
В заключение подраздела приведем изображения кривых плотности распределения обобщенного закона Пуассона и гистограммы для 5-й, 9-й и 12-й выборок, показанных на рис. 2 — 4.
Рис. 2. Выборка 5, обобщенный закон Пуассона, с=3,75
Выводы.
1. Приведены результаты проверки статических гипотез 12-ти выборок погрешностей навигационных измерений и показано, что только две выборки содержат погрешности, которые подчиняются нормальному закону, а погрешности
остальных выборок распределены по смешанным законам обоих типов.
2. В последних восьми выборках погрешности измерений можно описать с помощью обобщенного закона Пуассона, согласие выборок которых сопоставимо со смешанными законами.
Рис. 3. Выборка 9, обобщенный закон Пуассона, с=4
ЗР
7Г
ТЕ
ft
1
/
т/
ЦТ
гтЧ
/
) F 1
/
/
/ _L
■32-
-14
-14
_L3_
_25_
Рис. 4. Выборка 12, обобщенный закон Пуассона, с=4
Список литературы:
1. Monteiro Luis. What is the accuracy of DGPS? / Sardinia Monteiro Luis, Moore Terry, Hill Chris. // J. Navig. 2005. 58, № 2, p. 207-225.
2. Астайкин Д.В. Оценка точности позиции судна при наличии случайных погрешностей навигационных измерений / Астайкин Д.В. // Проблеми техшки: Науково-виробничий журнал. — 2014. № 4 . — С. 147-152.
3. Астайкин Д.В. Аналитическое выражение функции распределения случайных величин смешанных законов/ Астайкин Д.В. // Водный транспорт. — 2014. №2 (20).- С. 6 — 11.
4. Кондрашихин В.Т. Определение места судна / Кондрашихин В.Т. — М.: Транспорт, 1989. — 230с.
5. Hsu D. A. An analysis of error distribution in navigation / Hsu D. A. // The Journal of Navigation. -Vol. 32.- № 3. — P. 426 — 429.
6. Мельник Е.Ф. Приближенное описание смешанных распределений погрешностей навигационных измерений / Мельник Е.Ф. // Автоматизация судовых технических средств: науч. -техн. сб. -2002. — Вып. 7.- Одесса: ОГМА. — С. 96 — 100.
7. Мудров В.М. Методы обработки измерений / Мудров В.М., Кушко В.Л. — М.: Советское радио, 1976. 192 с.
8. В.В. Степаненко. Эффективность оценки параметров ситуации опасного сближения судов/ В.В. Степаненко. // Судовождение: Сб. науч. трудов / ОГМА. — Вып. 2 — Одесса: Латстар, 2000. — С. 201 -209.
9. Вентцель Е.С. Теория вероятностей/ Е.С. Вентцель — М.: Государственное издательство физико-математической литературы, 1962. — 564 с.
 При любых измерениях или наблюдениях в результатах неизбежно обнаруживаются ошибки. Под ошибкой понимают разность между полученным а* и действительным а значениями измеряемой величины, т. е. Δ=аi—а.
При любых измерениях или наблюдениях в результатах неизбежно обнаруживаются ошибки. Под ошибкой понимают разность между полученным а* и действительным а значениями измеряемой величины, т. е. Δ=аi—а.
В судовождении преимущественными видами наблюдений являются измерения пеленгов, вертикальных и горизонтальных углов и расстояний.
От точности, с которой измеряются эти навигационные параметры, зависит точность полученного обсервованного места. Для выявления методов уменьшения ошибок наблюдений следует знать причины их появления и характер действия.
Основными причинами возникновения ошибок любых измерений является несовершенство органов чувств наблюдателя, используемых инструментов и методов наблюдений, а также влияние внешних условий, при которых производятся наблюдения. Все ошибки, возникшие при наблюдениях, делятся по характеру действия на две группы: систематические и случайные.
Систематические ошибки — это ошибки, характер и причины возникновения которых могут быть выяснены и влияние которых на результаты измерений может быть исключено введением поправок или другими специальными приемами.
Основными причинами появления систематических ошибок при навигационных наблюдениях являются ошибки в принятых значениях поправок мореходных приборов и инструментов, в частности основного из них — магнитного или гироскопического компаса. Ошибка в поправке целиком входит в исправленные этой поправкой пеленги и курсы.
Поэтому для уменьшения или устранения систематических ошибок наблюдений рекомендуется возможно чаще и точнее определять поправку компаса, по возможности на каждой вахте и на каждом новом курсе.
Другим приемом исключения систематических ошибок является такая организация и обработка наблюдений, . при которой погрешности в инструментах не будут влиять на точность полученного места. Применение такого приема возможно, в частности, при определении места судна по наблюдениям трех ориентиров.
Случайные ошибки — это ошибки, вызываемые совместным действием многообразных и независимых друг от друга причин, проявляющих себя по-разному в каждом из наблюдений. По этой причине величины и знаки случайных ошибок в отличие от систематических могут меняться. Появление случайных ошибок при навигационных наблюдениях вызывается как несовершенством органов чувств наблюдателя (например, неточным совмещением нити пеленгатора с предметом или неточным снятием отсчетов по компасу), так и влиянием внешних условий.
При благоприятных метеорологических условиях случайные ошибки невелики. Однако при качке судна, в результате которой картушка магнитного компаса «ходит», а также при плохой видимости ориентиров, эти ошибки могут достигать при пеленговании 2-3°.
Систематические и случайные ошибки наблюдений приводят к смещению в ту или другую сторону проложенных на карте изолиний относительно их истинного положения.
Смещенные линии положения при их пересечении дают ошибочное место судна. Установлено, что величины ошибок в обсервациях зависят не только от погрешностей в наблюдениях, но и от ряда других причин, в частности от угла пересечения линий положения. При рассмотрении конкретных способов определения места судна будут указаны приемы, с помощью которых можно уменьшить влияние неучтенных ошибок на точность обсервации.
Промахи при наблюдениях и вычислениях. К промахам относятся грубые ошибки, величины которых заметно превышают ошибки измерений или вычислений, возможные при данных условиях. Они, как правило, возникают из-за допущенной судоводителем невнимательности. Крупный промах обнаруживает себя обычно в койце задачи по резкому несоответствию полученного результата с ожидаемым.
Мелкие промахи могут быть незаметными, и, что особенно опасно, полученный неверный результат может быть принят за правильный. Чтобы избежать промахов при наблюдениях, следует брать несколько отсчетов измеряемой величины. Тогда промах, если он был допущен в одном из наблюдений, обнаружит себя по заметному отличию данного отсчета от остальных.
Гарантией от промахов при вычислениях может служить только предельная внимательность, а также использование рекомендуемых методов контроля. Большое значение имеет использование привычных и целесообразных схем, аккуратное написание цифр, расположенных в колонках строго по разрядам.