Содержание раздела «Точность радиолокационных измерений»
- Точность определения дальности
- Случайная ошибка измерения
- Математические соотношения
- Систематические ошибки измерения
- Точность измерения угловых координат
- Как выполняется измерение для оценки точности радиолокатора?
- Примеры
Точность радиолокационных измерений
Точность это степень соответствия между оцениваемыми или измеряемыми значениями параметров
(координаты и/или скорость движения) лоцируемого объекта в определенный момент времени и их истинными значениями.
В радиолокации точность измерения обычно представляется как статистическая мера систематической ошибки,
которая характеризуется следующими свойствами:
- Предсказуемость: Точность позиционирования определяется при использовании географических или геодезических систем координат Земли.
- Повторяемость: Означает то, что результаты измерения одной и той же системой в сходных условиях,
будут характеризоваться близкими значениями точности в пределах некоторого интервала времени. - Относительность: Точность измерений относительно одной позиции может быть пересчитана для другой позиции (пренебрегая всевозможными ошибками).
Заявленное значение требуемой точности показывает,
что определяемое системой измерения значение того или иного параметра может отклоняться от его истинного значения,
и указывает интервал значений, в котором находится истинное значение с заданной вероятностью.
Рекомендуемое значение вероятности 95%, что соответствует интервалу,
равному удвоенному среднеквадратическому отклонению относительно среднего значения для нормального (Гауссового) распределения случайной величины.
Предположение, что все известные поправки учтены, означает, что ошибки оценивания будут иметь средние значения (смещения), близкие к нулю.
Любое остаточное смещение должно быть небольшим по сравнению с заявленной точностью.
Истинное значение — это значение, которое в рабочих условиях наилучшим образом характеризует измеряемую величину,
наблюдаемую в пределах репрезентативного (достаточного) интервала времени, площади и / или объема с учетом расположения и влияющих факторов.

ошибка измерения
импульс+шум
порог
идеальный импульс
Рисунок 1. Искажение фронта импульса под воздействием шумов

ошибка измерения
импульс+шум
порог
идеальный импульс
Рисунок 1. Искажение фронта импульса под воздействием шумов
Точность определения дальности
Теоретическая максимально достижимая точность измерения дальности методом радиолокационной импульсной дальнометрии
зависит от точности измерения времени запаздывания отраженного сигнала.
Случайные ошибки измерения
Случайные ошибки измерения в
импульсных радиолокаторах
возникают когда передний фронт отраженного сигнала искажается под воздействием шумов.
На отраженный сигнал всегда накладываются шумы, в результате чего увеличивается амплитуда принятого сигнала.
Это вызывает смещение переднего фронта импульса и, следовательно, является причиной ошибки измерения времени запаздывания отраженного сигнала.
На Рисунке 1 показано влияние шумов на обнаруживаемый передний фронт эхо-сигнала.
Сплошной линией (фиолетовой) изображен идеальный трапецеидальный импульс с довольно крутыми фронтом и спадом.
Этот импульс не может быть слишком близким к прямоугольному, поскольку это потребовало бы бесконечно широкой полосы частот.
Время задержки импульса измеряется в момент времени, когда его амплитуда достигает порогового значения, обычно на уровне 0,707 от максимальной амплитуды.
Однако на отраженный импульс накладывается шум (зеленая линия).
Измеренным может быть только напряжение, являющееся суммой мгновенных значений амплитуды импульса и шума
(желтая синяя пунктирная линия).
Это напряжение достигнет порогового значения раньше, чем напряжение идеального (в отсутствии шумов) импульса.
Разница между ними — это случайная ошибка измерения времени задержки, вызванная влиянием
шумов[1].
Если длительность импульса известна (что невозможно для первичного радиолокатора, а только для
вторичного радиолокатора),
то эта случайная ошибка может быть уменьшена математически путем одновременной оценки переднего фронта и спада (заднего фронта) импульса.
В других случаях, какой-либо учет случайной ошибки не представляется возможным.
Математический контекст
Как следует из Рисунка 1, точность измерения дальности в основном зависит от
уровня шума
или, точнее, от соотношения между амплитудой импульса и уровнем шума.
Количественно это соотношение описывается отношением «сигнал-шум».
Уровень шума, в свою очередь, зависит от ширины полосы пропускания приемного тракта.
Крутизна фронта и спада прошедшего тракт отраженного импульса также зависит от этой ширины.
Для значений отношения «сигнал-шум», значительно больших единицы, между этими величинами существует следующее
соотношение:[2]
.png)
.print.png)
где δR – ошибка измерения;
c0 – скорость света
B – ширина полосы пропускания;
SNR – отношение «сигнал-шум».
(1)
Однако ширина полосы пропускания является также существенным фактором,
влияющим на
разрешение радиолокатора по дальности
Sr = c0 / 2B.
Таким образом, максимально достижимая точность измерения дальности (характеризуемая ошибкой измерения дальности)
может быть представлена как функция разрешения радиолокатора по дальности:
.png)
.print.png)
(2)
Отсюда следует, что максимально достижимая ошибка измерения дальности должна быть значительно лучше чем разрешающая способность по дальности.
Систематические ошибки измерения
Систематические ошибки измерения, в отличие от случайных ошибок, могут быть учтены или уменьшены, в случае, если удается определить причины их возникновения.
В импульсных радиолокаторах
время задержки обычно измеряется между передним фронтом излучаемого импульса и передним фронтом отраженного от цели импульса.
Точность измерения в таком случае будет зависеть от частоты следования тактовых (измерительных) импульсов,
по количеству которых между заданными моментами времени измеряется
длительность интервала.
Очевидно, что в промежутке между тактовыми импульсами измерение не может быть произведено,
что приводит к возникновению систематической ошибки измерения дальности.
На практике точность измерения дальности зависит от размера отдельной ячейки дальности, используемой при обработке сигнала.
В соответствии с рекомендациями
ИКАО[3]
для радиолокаторов систему управления воздушным движением размер ячейки должен быть 1/128 морской мили,
то есть около 14,5 м, что соответствует интервалу времени почти 10 нс.
В
радиолокаторах непрерывного излучения
измерение сдвига фазы принятого сигнала относительно текущей фазы передатчика может содержать (хотя и неоднозначную) информацию о дальности.
Точность измерения дальности в
радиолокаторах непрерывного излучения с частотной модуляцией
также определяется параметрами передатчика, особенно наклоном и линейностью закона изменения частоты.
Точность измерения углов

стандартные требования в
зависимости от дальности
точность измерения азимута:
методом скользящего окна
моноимпульсным методом
дальность от радара (в морских милях)
Рисунок 2: Зависимость точности измерения угловых координат от дальности
(Источник: Лаборатория Линкольна)

стандартные требования в
зависимости от дальности
точность измерения азимута:
методом скользящего окна
моноимпульсным методом
дальность от радара (в морских милях)
Рисунок 2: Зависимость точности измерения угловых координат от дальности
(Источник: Лаборатория Линкольна)
Точность измерения углов зависит как от внутренних методов обработки сигнала так и от внешних условий.
Аномальные условия распространения,
которые часто возникают из-за изменений давления воздуха,
влияют на измерение угла места и могут влиять на измерение горизонтального угла (азимута), вызывая возникновение случайной ошибки измерения.
Однако более частые источники возникновения систематических ошибок определяются внутренними факторами.
Например, измерение угла
методом скользящего окна
является довольно неточным.
На практике половина ширины диаграммы направленности антенны делится на число квантований, определяемое используемым методом
(например, 8 или 16 периодов следования импульсов) и таким образом приводит к систематической ошибке порядка одного градуса. В
корреляционных методах,
где выполняется интерполяция промежуточных значений, достигается более высокая точность измерения.
Наилучшая точность измерения угловых координат на данный момент достигается при использовании метода
конического сканирования и при
моноимпульсной пеленгации.
Как выполняются измерения для оценки точности радиолокатора?
Порядок проведения таких измерений определяется их целью, а именно: координаты, измеренные радиолокатором сравниваются с действительными координатами цели.
Для радиолокаторов наблюдения за воздушным движением для этой цели выполняется испытательный полет (облет), например, компанией
FCS Flight Calibration Services GmbH.
На борту самолета Learjet 35 располагается регистратор, который записывает текущие координаты самолета,
получаемые дифференциальной системой спутниковой навигации GPS
с ошибками менее одного метра.
В то же время траектория полета самолета регистрируется на радиолокаторе.
Оба регистратора синхронизируются при помощи сигналов единого времени, получаемых ими от системы GPS,
и результаты измерений сравниваются между собой.
При обработке результатов сравнения измеренных и действительных значений координат цели применяются методы математической статистики.
Явные ошибочные измерения исключаются из анализа, поскольку необходимо определить систематическую составляющую ошибки измерения радиолокатора.
Это не означает, однако, что требуется значительное количество зондирующих импульсов (возможно, для получения хорошего значения).
В радиолокаторах, использующих моноимпульсный метод пеленгации значение ошибки измерения определяется для каждого импульса.
Если используется метод скользящего окна, то соответствующее значение определяется для конкретного требуемого числа импульсов.
Для достижения хорошей точности измерения дальности требуется, чтобы зондирующие импульсы имели стабильный и крутой фронт.
Такой фронт часто не наблюдается при использовании
внутриимпульсной модуляции.
Но тут необходимо учитывать, что измерение дальности выполняется после сжатия отраженного импульса.
В этой точке, уже после сжатия, импульс вновь имеет крутой фронт.
Единственным условием проведения подобных измерений является отсутствие помех.
Это означает, что эхо-сигнал не должен смешиваться с внешними помехами.
Однако внутренние шумы всегда будут присутствовать в тракте прохождения отраженного сигнала.
Поэтому результативные измерения возможны когда уровень отраженного от летательного аппарата сигнала будет существенно выше
уровня шума.
Наконец, калибровка полета должна выявлять возможные дополнительные систематические ошибки, а не случайные ошибки.
Примеры
В таблице 1 приведены характеристики точности для некоторых радиолокаторов.
| Название радиолокатора | Ошибка измерения углов |
Ошибка измерения дальности |
Ошибка измерения высоты |
|---|---|---|---|
| BOR–A 550 | < ±0.3° | < 20 м | |
| LANZA | < ±0.14° | < 50 м | 340 м ≈ 1150 футов (на дальности 100 морских миль) |
| GM 400 | < ±0,3° | < 50 м | 600 м ≈ 2000 футов (на дальности 100 морских миль) |
| RRP–117 | < ±0,18° | < 463 м | 1000 м ≈ 3000 футов (на дальности 100 морских миль) |
| MSSR-2000 | < ±0.049° | < 44.4 м | |
| STAR-2000 | < ±0.16° | < 60 м | |
| Variant | < ±0.25° | < 25 м |
Таблица 1. Примеры
Примітки
- Merrill I. Skolnik: »Introduction to Radar Systems» McGraw-Hill Europe, 2001, ISBN 007-118189-x, S. 317,
Topic 6.3 Theoretical Accuracy of Radar Measurements - G. Richard Curry: »Radar System Performance Modeling» 2005, ISBN 978-1-58053-816-9, S.168
- ICAO Annex 10 – Volume 4. Aeronautical Telecommunications – Surveillance and Collision Avoidance Systems, Topic 4.3.2.1.3 Range and Bearing Accuracy,
(Bundesamt für Zivilluftfahrt, Schweiz)
Составляющими
инструментальной ошибки измерения
дальности являются:
ошибка
за счет изменения времени запаздывания
сигнала при прохождении через приемный
тракт;
ошибка
съема координат.
Ошибка
за счёт изменения времени запаздывания
в приёмном тракте имеет систематическую
и случайную составляющие. Систематическая
составляющая обусловлена конечным
значением полосы пропускания усилительных
каскадов (главным образом УПЧ), что
приводит к растягиванию фронтов и
задержке сигналов. Время запаздывания
в приёмном тракте РЛС обычно составляет
величину tзап
пр = = (0,3…3)τи.
Оно может быть скомпенсировано путём
соответствующей расстановки импульсов
запуска оконечного устройства.
Случайная
составляющая времени задержки обусловлена
изменением полосы пропускания
каскадов из-за изменения их режимов
работы вследствие нестабильностей
источников питания, ухода параметров
элементов под действием дестабилизирующих
факторов, старения деталей и т. д.
Среднее квадратическое значение
нестабильности времени запаздывания
составляет σt
зап = 0,1 …0,2
мкс, что соответствует ошибке измерения
дальности 15…30 м.
Ошибка, возникающая
при съёме координат, зависит от вида
съёма.
При
визуальном съёме она обусловлена:
неточностью
формирования масштабных отметок
дальности (МОД);
неточностью
определения центра отметки;
интерполяцией
положения центра отметки относительно
МОД.
Для исключения
ошибок измерения дальности, связанных
с нелинейностью развертки индикатора,
осуществляют электрическую калибровку
шкалы дальности путём формирования МОД
различных градаций. Обычно устройство
формирования МОД выполняется по
структурной схеме (рис. 12.1). С приходом
импульса запускa генератор
прямоугольных импульсов формирует
импульс с длительностью, равной
времени прямого хода развертки индикатора.
В течение этого времени задающий
генератор генерирует непрерывные
колебания с частотой f0,
которые затем ограничиваются,
дифференцируются и используются для
запуска формирователя.
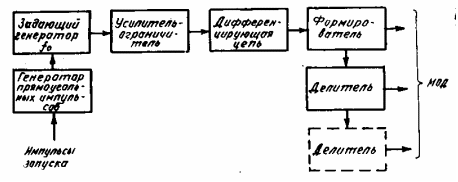
Рис. 12.1. Устройство
формирования масштабных отметок
дальности
Последний формирует
МОД, представляющие собой видеоимпульсы
с длительностью 1…2 мкс и периодом
повторения Т0,
определяющим минимальную градацию МОД
(расстояние в километрах между масштабными
отметками): Δrшк
= сТ0/2
= с/2f0.
Для удобства отсчёта путём последующего
деления формируются МОД больших градаций.
Нестабильность частоты задающего
генератора приводит к смещению МОД
на развертке индикатора и, следовательно,
к ошибке измерения дальности,
обусловленной неточностью формирования
МОД. Эта ошибка σRМОД
= rσj
/f0
, где σj
—полуширина спектра флюктуации
колебании задающего генератора.
При переходе от
σj
к долговременной относительной
нестабильности частоты δf
= Δfmax/f0
= 3σf
/f0,
σRМОД
= rδf
/3
(12.13)
Расчеты
по формуле (12.13) показывают, что требования
к стабильности частоты задающего
генератора, при которых влиянием ошибки
формирования МОД можно пренебречь,
достаточно жесткие и диктуют
необходимость использования специальных
схем генераторов: с контуром ударного
возбуждения или с кварцевой стабилизацией.
Максимальное
значение ошибки за счет неточного
определения центра отметки составляет
половину отметки
![]()
(12.14)
где mR
= ΔR/Lpr
— масштаб по дальности;
ΔR
— диапазон дальностей, выносимых
на индикатор;
Lpr
— длина развертки дальности;
dл
— диаметр луча ЭЛТ.
Среднее
квадратическое значение ошибки
определения центра отметки
(12.15)![]()
Эта ошибка в РЛС
с ИКО составляет 200 … 300 м. Для её уменьшения
необходимо использовать ЭЛТ с высоким
качеством Qтр
= Dтр/dл
(здесь Dтр
— диаметр экрана трубки), а также
специальные индикаторы типа азимут—дальность
(НАД) или специальные режимы ИКО: кольцевой
(с задержкой начала развертки) или
секторный (со смещением центра на край
экрана).
Ошибка интерполяции
при использовании электрической шкалы
![]()
Она
может быть довольно значительной для
её снижения необходимо предусматривать
более мелкие градации МОД (Δrшк
= 1 …2 км).
Суммарная ошибка
измерения дальности, обусловленная
визуальным съёмом:
![]()
(12.16)
При автоматическом
съёме дальность измеряется по номеру
канала дальности N,
в котором находится сигнал цели
r*
= NΔr,
где
Δr
— диапазон дальностей, перекрываемых
одним дальностным каналом.
Причинами
возникновения ошибки съёма дальности
в этом случае являются дискретизация
по дальности и нестабильность частоты
повторения импульсов дискретизации
Fд.
Ошибка дискретизации
определяется соотношением
![]()
(12.17)
а ошибка,
обусловленная нестабильностью Fд,
по аналогии с (12.13)
![]()
(12.18)
С
учетом (12.17), (12.18)
![]()
(12.19)
Для
уменьшения этой ошибки необходимо
увеличивать частоту дискретизации и
повышать её стабильность, используя
генераторы импульсов с кварцевой
стабилизацией. Однако следует помнить,
что увеличение Fд
связано с увеличением числа каналов
дальности и, следовательно, аппаратурных
затрат.
При полуавтоматическом
съёме оператор совмещает электронный
маркер с центром отметки, после чего
нажимает кнопку съёма и координаты цели
в кодированном виде поступают в канал
связи с потребителем радиолокационной
информации.
Ошибка
измерения дальности при этом обусловлена:
неточностью
определения центра отметки (см. (12.15));
неточностью
совмещения маркера с центром отметки;
дискретностью
представления дальности (см. (12.17)).
Ошибка, обусловленная
неточностью совмещения маркера,
определяется соотношением
σR
МАРК = mR
dМАРК
/3, где
dМАРК
— диаметр маркера (обычно dМАРК
= dл).
Суммарная ошибка
съёма ![]()
(12.20)
Для уменьшения
этой ошибки необходимо принимать такие
же меры, как при визуальном и автоматическом
съёме.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Содержание раздела «Точность радиолокационных измерений»
- Точность определения дальности
- Случайная ошибка измерения
- Математические соотношения
- Систематические ошибки измерения
- Точность измерения угловых координат
- Как выполняется измерение для оценки точности радиолокатора?
- Примеры
Точность радиолокационных измерений
Точность это степень соответствия между оцениваемыми или измеряемыми значениями параметров
(координаты и/или скорость движения) лоцируемого объекта в определенный момент времени и их истинными значениями.
В радиолокации точность измерения обычно представляется как статистическая мера систематической ошибки,
которая характеризуется следующими свойствами:
- Предсказуемость: Точность позиционирования определяется при использовании географических или геодезических систем координат Земли.
- Повторяемость: Означает то, что результаты измерения одной и той же системой в сходных условиях,
будут характеризоваться близкими значениями точности в пределах некоторого интервала времени. - Относительность: Точность измерений относительно одной позиции может быть пересчитана для другой позиции (пренебрегая всевозможными ошибками).
Заявленное значение требуемой точности показывает,
что определяемое системой измерения значение того или иного параметра может отклоняться от его истинного значения,
и указывает интервал значений, в котором находится истинное значение с заданной вероятностью.
Рекомендуемое значение вероятности 95%, что соответствует интервалу,
равному удвоенному среднеквадратическому отклонению относительно среднего значения для нормального (Гауссового) распределения случайной величины.
Предположение, что все известные поправки учтены, означает, что ошибки оценивания будут иметь средние значения (смещения), близкие к нулю.
Любое остаточное смещение должно быть небольшим по сравнению с заявленной точностью.
Истинное значение — это значение, которое в рабочих условиях наилучшим образом характеризует измеряемую величину,
наблюдаемую в пределах репрезентативного (достаточного) интервала времени, площади и / или объема с учетом расположения и влияющих факторов.
ошибка измерения
импульс+шум
порог
идеальный импульс
Рисунок 1. Искажение фронта импульса под воздействием шумов
ошибка измерения
импульс+шум
порог
идеальный импульс
Рисунок 1. Искажение фронта импульса под воздействием шумов
Точность определения дальности
Теоретическая максимально достижимая точность измерения дальности методом радиолокационной импульсной дальнометрии
зависит от точности измерения времени запаздывания отраженного сигнала.
Случайные ошибки измерения
Случайные ошибки измерения в
импульсных радиолокаторах
возникают когда передний фронт отраженного сигнала искажается под воздействием шумов.
На отраженный сигнал всегда накладываются шумы, в результате чего увеличивается амплитуда принятого сигнала.
Это вызывает смещение переднего фронта импульса и, следовательно, является причиной ошибки измерения времени запаздывания отраженного сигнала.
На Рисунке 1 показано влияние шумов на обнаруживаемый передний фронт эхо-сигнала.
Сплошной линией (фиолетовой) изображен идеальный трапецеидальный импульс с довольно крутыми фронтом и спадом.
Этот импульс не может быть слишком близким к прямоугольному, поскольку это потребовало бы бесконечно широкой полосы частот.
Время задержки импульса измеряется в момент времени, когда его амплитуда достигает порогового значения, обычно на уровне 0,707 от максимальной амплитуды.
Однако на отраженный импульс накладывается шум (зеленая линия).
Измеренным может быть только напряжение, являющееся суммой мгновенных значений амплитуды импульса и шума
(желтая синяя пунктирная линия).
Это напряжение достигнет порогового значения раньше, чем напряжение идеального (в отсутствии шумов) импульса.
Разница между ними — это случайная ошибка измерения времени задержки, вызванная влиянием
шумов[1].
Если длительность импульса известна (что невозможно для первичного радиолокатора, а только для
вторичного радиолокатора),
то эта случайная ошибка может быть уменьшена математически путем одновременной оценки переднего фронта и спада (заднего фронта) импульса.
В других случаях, какой-либо учет случайной ошибки не представляется возможным.
Математический контекст
Как следует из Рисунка 1, точность измерения дальности в основном зависит от
уровня шума
или, точнее, от соотношения между амплитудой импульса и уровнем шума.
Количественно это соотношение описывается отношением «сигнал-шум».
Уровень шума, в свою очередь, зависит от ширины полосы пропускания приемного тракта.
Крутизна фронта и спада прошедшего тракт отраженного импульса также зависит от этой ширины.
Для значений отношения «сигнал-шум», значительно больших единицы, между этими величинами существует следующее
соотношение:[2]
где δR — ошибка измерения;
c0 — скорость света
B — ширина полосы пропускания;
SNR — отношение «сигнал-шум».
(1)
Однако ширина полосы пропускания является также существенным фактором,
влияющим на
разрешение радиолокатора по дальности
Sr = c0 / 2B.
Таким образом, максимально достижимая точность измерения дальности (характеризуемая ошибкой измерения дальности)
может быть представлена как функция разрешения радиолокатора по дальности:
(2)
Отсюда следует, что максимально достижимая ошибка измерения дальности должна быть значительно лучше чем разрешающая способность по дальности.
Систематические ошибки измерения
Систематические ошибки измерения, в отличие от случайных ошибок, могут быть учтены или уменьшены, в случае, если удается определить причины их возникновения.
В импульсных радиолокаторах
время задержки обычно измеряется между передним фронтом излучаемого импульса и передним фронтом отраженного от цели импульса.
Точность измерения в таком случае будет зависеть от частоты следования тактовых (измерительных) импульсов,
по количеству которых между заданными моментами времени измеряется
длительность интервала.
Очевидно, что в промежутке между тактовыми импульсами измерение не может быть произведено,
что приводит к возникновению систематической ошибки измерения дальности.
На практике точность измерения дальности зависит от размера отдельной ячейки дальности, используемой при обработке сигнала.
В соответствии с рекомендациями
ИКАО[3]
для радиолокаторов систему управления воздушным движением размер ячейки должен быть 1/128 морской мили,
то есть около 14,5 м, что соответствует интервалу времени почти 10 нс.
В
радиолокаторах непрерывного излучения
измерение сдвига фазы принятого сигнала относительно текущей фазы передатчика может содержать (хотя и неоднозначную) информацию о дальности.
Точность измерения дальности в
радиолокаторах непрерывного излучения с частотной модуляцией
также определяется параметрами передатчика, особенно наклоном и линейностью закона изменения частоты.
Точность измерения углов
стандартные требования в
зависимости от дальности
точность измерения азимута:
методом скользящего окна
моноимпульсным методом
дальность от радара (в морских милях)
Рисунок 2: Зависимость точности измерения угловых координат от дальности
(Источник: Лаборатория Линкольна)
стандартные требования в
зависимости от дальности
точность измерения азимута:
методом скользящего окна
моноимпульсным методом
дальность от радара (в морских милях)
Рисунок 2: Зависимость точности измерения угловых координат от дальности
(Источник: Лаборатория Линкольна)
Точность измерения углов зависит как от внутренних методов обработки сигнала так и от внешних условий.
Аномальные условия распространения,
которые часто возникают из-за изменений давления воздуха,
влияют на измерение угла места и могут влиять на измерение горизонтального угла (азимута), вызывая возникновение случайной ошибки измерения.
Однако более частые источники возникновения систематических ошибок определяются внутренними факторами.
Например, измерение угла
методом скользящего окна
является довольно неточным.
На практике половина ширины диаграммы направленности антенны делится на число квантований, определяемое используемым методом
(например, 8 или 16 периодов следования импульсов) и таким образом приводит к систематической ошибке порядка одного градуса. В
корреляционных методах,
где выполняется интерполяция промежуточных значений, достигается более высокая точность измерения.
Наилучшая точность измерения угловых координат на данный момент достигается при использовании метода
конического сканирования и при
моноимпульсной пеленгации.
Как выполняются измерения для оценки точности радиолокатора?
Порядок проведения таких измерений определяется их целью, а именно: координаты, измеренные радиолокатором сравниваются с действительными координатами цели.
Для радиолокаторов наблюдения за воздушным движением для этой цели выполняется испытательный полет (облет), например, компанией
FCS Flight Calibration Services GmbH.
На борту самолета Learjet 35 располагается регистратор, который записывает текущие координаты самолета,
получаемые дифференциальной системой спутниковой навигации GPS
с ошибками менее одного метра.
В то же время траектория полета самолета регистрируется на радиолокаторе.
Оба регистратора синхронизируются при помощи сигналов единого времени, получаемых ими от системы GPS,
и результаты измерений сравниваются между собой.
При обработке результатов сравнения измеренных и действительных значений координат цели применяются методы математической статистики.
Явные ошибочные измерения исключаются из анализа, поскольку необходимо определить систематическую составляющую ошибки измерения радиолокатора.
Это не означает, однако, что требуется значительное количество зондирующих импульсов (возможно, для получения хорошего значения).
В радиолокаторах, использующих моноимпульсный метод пеленгации значение ошибки измерения определяется для каждого импульса.
Если используется метод скользящего окна, то соответствующее значение определяется для конкретного требуемого числа импульсов.
Для достижения хорошей точности измерения дальности требуется, чтобы зондирующие импульсы имели стабильный и крутой фронт.
Такой фронт часто не наблюдается при использовании
внутриимпульсной модуляции.
Но тут необходимо учитывать, что измерение дальности выполняется после сжатия отраженного импульса.
В этой точке, уже после сжатия, импульс вновь имеет крутой фронт.
Единственным условием проведения подобных измерений является отсутствие помех.
Это означает, что эхо-сигнал не должен смешиваться с внешними помехами.
Однако внутренние шумы всегда будут присутствовать в тракте прохождения отраженного сигнала.
Поэтому результативные измерения возможны когда уровень отраженного от летательного аппарата сигнала будет существенно выше
уровня шума.
Наконец, калибровка полета должна выявлять возможные дополнительные систематические ошибки, а не случайные ошибки.
Примеры
В таблице 1 приведены характеристики точности для некоторых радиолокаторов.
| Название радиолокатора | Ошибка измерения углов |
Ошибка измерения дальности |
Ошибка измерения высоты |
|---|---|---|---|
| BOR–A 550 | < ±0.3° | < 20 м | |
| LANZA | < ±0.14° | < 50 м | 340 м ≈ 1150 футов (на дальности 100 морских миль) |
| GM 400 | < ±0,3° | < 50 м | 600 м ≈ 2000 футов (на дальности 100 морских миль) |
| RRP–117 | < ±0,18° | < 463 м | 1000 м ≈ 3000 футов (на дальности 100 морских миль) |
| MSSR-2000 | < ±0.049° | < 44.4 м | |
| STAR-2000 | < ±0.16° | < 60 м | |
| Variant | < ±0.25° | < 25 м |
Таблица 1. Примеры
Примітки
- Merrill I. Skolnik: »Introduction to Radar Systems» McGraw-Hill Europe, 2001, ISBN 007-118189-x, S. 317,
Topic 6.3 Theoretical Accuracy of Radar Measurements - G. Richard Curry: »Radar System Performance Modeling» 2005, ISBN 978-1-58053-816-9, S.168
- ICAO Annex 10 — Volume 4. Aeronautical Telecommunications — Surveillance and Collision Avoidance Systems, Topic 4.3.2.1.3 Range and Bearing Accuracy,
(Bundesamt für Zivilluftfahrt, Schweiz)
12.2.1. Потенциальная ошибка измерения дальности
Эта
ошибка характеризует предельно достижимую
точность и определяется отношением
сигнал — шум и шириной спектра зондирующего
сигнала:
![]()
(12.7)
где Пэ
— эффективная ширина спектра зондирующего
сигнала;
(Рс/Рш)вх
изм —
отношение сигнал — шум на входе
измерительного устройства.
Эффективная ширина
спектра зондирующего сигнала определяется
выражением
![]()
(12.8)
![]()
где — спектр
сигнала.
Она связана с
шириной спектра сигнала Пи
соотношением
Пэ=
кПи
к = 1,7 …
3.
(12.9)
В частности, для
колоколообразного импульса, спектр
которого описывается соотношением
![]()
(12.10)
эффективная ширина
спектра
![]()
где
Пи
= 1/τи
— ширина спектра импульса на уровне
0,46.
Для импульсов с
равномерным в пределах Пи
спектром
![]()
Наибольшая точность
измерения дальности обеспечивается
при использовании сигнала, состоящего
из двух синусойд с частотами f1
и f2,
разнесенными на интервал, равный Пи
(фазовый метод дальнометрии). В этом
случае Пэ
= πПи
= 3,14 Пи.
Для импульсных РЛС обнаружения к
=1,7…2.
Отношение сигнал—шум
на входе измерительного устройства для
границы зоны обзора равно параметру
обнаружения γ1
(см. §4.6), а на дальностях r
< R оно
будет возрастать в соответствии с
выражением
(12.11)![]()
Подставив (12.9),
(12.11) в (12.7), получим зависимость
потенциальной ошибки измерения
дальности от параметров РЛС:
![]()
(12.12)
Для
уменьшения этой ошибки необходимо
увеличивать ширину спектра зондирующего
сигнала и максимальную дальность
действия РЛС.
Пути
увеличения дальности рассмотрены в гл.
2. Основной из них — увеличение энергии,
излучаемой в зону обзора. Одним из
перспективных путей, одновременно
удовлетворяющим перечисленным выше
требованиям, является использование в
РЛС сложных сигналов (ЛЧМ или ФКМ).
Потенциальная
ошибка измерения дальности в РЛС
обнаружения даже при использовании
сравнительно узкополосных сигналов
обычно не превышает значений σRпот
= 50 … 150 м и составляет незначительную
часть (10… 15%) от общей ошибки измерения
дальности при визуальном съёме информации.
При автосъёме она может вносить
существенный вклад в общую ошибку
измерения.
12.2.2. Ошибка измерения дальности за счет особенностей распространения радиоволн
В
реальной атмосфере из-за имеющихся
неоднородностей изменяется скорость
и нарушается прямолинейность
распространения радиоволн, что приводит
к возникновению ошибки измерения
дальности [40]. В РЛС обнаружения ошибка
составляет σRРРВ
= 10…15 м и ею можно пренебречь, поскольку
она существенно меньше потенциальной.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Неправильное определение дальности до цели является самой распространенной причиной промахов при дальнейстрельбе. Более распространенной, чем плохая оценка ветра, более распространенной, чем дергание спускового крючка, чем неправильный вынос точки прицеливания или внесение упреждений. Более распространенной, чем неправильный расчет вертикальных поправок.
Способы определения дальности до цели, ошибки в определении дальности, определение дальности сквозь прицельную сетку, с помощью большого пальца и глазомерные способы.
Если вы неправильно определили дальности до цели, скорее всего вы промахнетесь. На это есть несколько причин. Самая серьезная из них состоит в том, что траектория пули, которая является дугой, начинает все более и более понижаться на больших расстояниях, поэтому даже небольшая ошибка оказывает большое влияние. Ниже мы показали траекторию пули .308 Federal Match.

Обратите внимание, что на 100, 200, и 300 ярдах, она летит по пологой траектории. Даже если вы совершили большую ошибку в определении дальности — скажем, решили, что цель находится от вас в 300 ярдах, тогда как действительная дальность составила 200 ярдов — на близком расстоянии, вы вероятно поразите свою цель, целясь в центр груди.
Но, например, вы ошибочно решили, что цель находится на 600 ярдах, а на самом деле только на 500 ярдах — хорошо, сейчас разница в траектории составляет около 3 футов. Вы видите, на более дальнем расстоянии, пуля снижается по более крутой дуге, и даже незначительные ошибки становятся главными.
К сожалению, по мере увеличения дальности до цели, мы также чаще и понятнее всего делаем ошибки при ее определении. Но другой серьезной проблемой, связанной с определением дальности до цели, является то, что ошибки суммируются и усложняют все последующие вычисления поправок на ветер, упреждений, и так далее. И это может приводить к промахам даже на близких дистанциях.
Посмотрите на рисунки ниже, в которых мы рассматриваем суммарное влияние ошибок при стрельбе по цели, которая находится всего в 400 ярдах. Несмотря на то, что снайпер сделал каждое отдельное вычисление правильно, за исключением первоначального определения дальности до цели, он полностью промахнулся по относительно близкой цели.
Кумулятивный эффект ошибки в определении дальности до цели.
Поскольку ряд других факторов при прицеливании требуют увеличения поправок по мере увеличения расстояния, они очень чувствительны к любой ошибке при определении дальности до цели. Поэтому изначальные ошибки в определении дальности до цели становятся кумулятивными, и даже незначительная ошибка может приводить к полному промаху.
Для нашего примера давайте примем, что цель действительно находится на дальности 400 ярдов, но наш снайпер ошибочно решил, что дальность составляет 300 ярдов. Мы будем предполагать, что он стреляет 168 грановой пулей .308 Match и винтовка пристреляна на 300 ярдах. Обратите внимание, как накапливаются его ошибки :

Таким образом, мы показали на иллюстрации, как всего одна фундаментальная ошибка в определении дальности до цели накапливается и ведет к полному промаху.

Эти поправки отличаются только из-за разницы в измерении дальности. Этот промах вызван плохим определением дальности. В то время как правильно использованная поправка должна привести к поражению центра масс.
Мы собираемся рассмотреть несколько различных устройств и способов определения дальности до цели, но по мере их рассмотрения, имейте в виду, что вы должны практиковать их в положении лежа. Таким образом, вы будете учиться использовать их так, как вы будете фактически действовать.
Определение дальности до цели сквозь прицельную сетку оптического прицела или бинокля.
Любая прицельная сетка типа «дуплекс» имеет присущую ей способность к измерению дальностей. Все, что нужно — это точные размеры сетки. Рассмотрим прицельную сетку «дуплекс» фирмы Leupold, какая существует в прицеле 3,5-10x, при его установке на максимальную кратность.
Самая тонкая часть прицельных нитей составляет 10 МОА от края до края. Это соответствует 10 дюймам на 100 ярдах, затем 20 дюймам на 200 ярдах, и так далее. Мы показали, как эта сетка выглядит при наложении на человека. Обратите внимание, что мы всегда оставляем верхнюю толстую часть прицельной нити над верхней частью его головы, не в ногах, поскольку вероятность того, что мы будем видеть верхнюю часть цели, а не ее основание, гораздо выше, особенно на больших дальностях.

Когда она находится в 600 ярдах от нас, цель заполняет всю тонкую часть сетки. Но будьте осторожны: чтобы быть точным, вы всегда определяете дальности до цели с помощью своего прицела, установленного на ту же кратность.
Мы можем поблагодарить Специального Агента ФБР Мэтью Боуэн Джонсона (Matthew Bowen Johnson) за развитие этого способа во время своей службы на Курсах огневой подготовки ФБР в Куантико. Он прекрасный стрелок и истинный джентльмен-южанин. Его способ работает с любой сеткой типа «дуплекс». Все, что вам нужно, это точные размеры сетки.
Компания Leupold развила способ Специального Агента Джонсона далее и ввела кольцо измерения дальности, расположив его рядом с кольцом регулировки кратности на своих прицелах Vari-X III. Все, что нужно сделать стрелку — покрутить кольцо регулировки кратности вперед-назад, пока перекрестие прицельной сетки и края «дуплекса» не охватят отрезок в 16 дюймов, а затем считать значение дальности с кольца регулировки кратности.
Это не настолько точно, как измерение дальностей с помощью лазерного дальномера, но точнее, чем большинство глазомерных способов. Некоторые изготовители оптических прицелов, включая компанию Schmidt Bender, для быстрого определения дальностей помещают в прицельной сетке вертикальный «ступенчатый» дальномер.

Здесь, стрелок помещает вертикальную шкалу на человеческую цель, чтобы определить дальность, вводит поправку, и стреляет. Это также не очень точный способ, но он чрезвычайно быстр и предназначен только для относительно близких дистанций, до 400 метров.
Способ измерения дальности до цели с помощью большого пальца и глазомерные способы.
Я должен также поблагодарить Специального Агента ФБР Джонсона за обучение меня способу определения дальности до цели, который вероятно восходит ко временам длинной кентуккийской винтовки.
Как показано на иллюстрации, полностью вытяните одну руку и поднимите свойбольшой палец так, чтобы ноготь был сразу под вашей целью, и цель находилась на самом краю ногтя. А теперь представьте, что ваша цель повернулась налево, и сделала определенное количество обычных шагов, чтобы пройти всю ширину вашего ногтя. Это и есть дальность до нее в сотнях ярдов.

Если требуется только один шаг, она в 50 ярдах от вас. Два шага означает, что она в 100 ярдах, и так далее. Но только до 200 ярдов максимум, потому что вы вероятно не сможете точно разделить ширину вашего пальца точнее, чем на одну четверть.
Наша следующая иллюстрация показывает способ, давно используемый в войсках. Он называется способ «футбольного поля» или «100-ярдовых отрезков». Чтобы использовать его, мысленно разделите расстояние на 100-ярдовые отрезки, отчетливо представляя себе длину футбольного поля. Или представьте первые 100 ярдов. Затем мысленно добавляйте их снова и снова до полной дальности.

Когда расстояние становится больше, чем 500 ярдов, или если какой-либо элемент земной поверхности расположен ниже вашей линии наблюдения, способ футбольного поля становится менее и менее точным. Обычно, лучше разделить все расстояние пополам, а затем оценить только ближайшую половину и удвоить ее. Не удивительно, что такой способ назван способом «половины дистанции».
Используя любой способ определения расстояний — и особенно глазомерный — сравните ваши результаты с теми, которые получил ваш товарищ по команде, и возьмите среднюю величину. Обычно, эта средняя величина точнее, чем любая из ваших индивидуальных оценок.
При использовании этих глазомерных способов существует опасность, что в некоторых ситуациях наши глаза могут нас обманывать. Эти общие визуальные эффекты показаны на иллюстрации.

Цель кажется ближе, когда :
Она находится за понижением местности, большая часть которого скрыта от вашего взгляда.
Вы наблюдаете вниз с возвышенности.
Вы смотрите вдоль прямой линии, например, автомобильной или железной дороги.
Она находится на плоской, однообразной поверхности. Подобноснегу или песку, особенно при ярком солнечном свете.
Цель кажется дальше, если :
Она невелика по сравнению с окружающей ее местностью.
Она находится выше, чем вы.
Поле зрения очень узкое, как например, при наблюдении вдоль тропы.
Вы смотрите через понижение местности, и оно целиком видимо для вас.
Использование топографической карты для определения дальности до цели.
Когда я говорю курсантам, что один из самых легких и самых точных способов определения дальности является использованиекарты, они обычно говорят: «Почему, я даже не мог подумать об этом». Это настолько элементарно и так очевидно, но очень часто это последний способ, об использовании которого думает снайпер. А он вероятно должен быть первым.
Очевидно, что самый простой подход — это нанести на карту место вашего расположения иместоположение вашей цели и просто измерить расстояние. Хотя это не всегда работает. Потому что иногда вы не уверены в расположении вашей цели. В этой ситуации осмотритесь вокруг, пока вы не увидите какой-то заметный местный предмет, который вероятно расположен на том же расстоянии, и измерьте это расстояние на вашей карте.
Более точная оценка дальности может быть произведена путем использованияGPS совместно с вашей картой. Убедившись, что рядом есть отличительный местный предмет возле цели. Установите свое точное расположение по GPS. Нанесите это место и место расположения цели на карту. Затем измерьте расстояние и вы узнаете его.
Подсчет столбов и опор ЛЭП для определения дальности до цели.
Если вы тщательно посмотрите вокруг в районе ваших действий, вы возможно, обратите внимание на некоторые искусственные местные предметы, установленные на одинаковом расстоянии друг от друга, и которые вы можете использовать для определения дальности. Чаще всего встречаются столбы от заборов и опоры ЛЭП или телефонных линий. Подобные предметы могут быть очень полезны. Но убедитесь в том, что они действительно размещены через стандартные интервалы.
Поскольку опоры ЛЭП дороги в установке, и большинство землевладельцев их не любят, энергетические компании стремятся разместить их как можно дальше друг от друга, насколько позволяют требования безопасности. И обычно это точно определенное расстояние. Хотя дополнительные опоры могут быть добавлены для дополнительной поддержки на реке или на холме, расстояние должно быть относительно постоянным.
С другой стороны, столбы от забора изменяются от землевладельца к землевладельцу, и я бы колебался слишком довериться последовательному интервалу. Хотя, конечно, это стоит проверить.
Влияние ошибки в определении дальности до цели.
Поскольку траектория пули в начале имеет легкий наклон вверх, а затем понижается сильнее и сильнее по мере замедления пули, ошибки в определении большой дальности до цели прощаются намного меньше, чем ошибки на коротких дистанциях.
Чтобы помочь вам оценить это, мы приводим данные для 168 грановой пули .308 Match, чтобы показать, как небольшая ошибка в 10 ярдов при определении дальности до цели влияет на положение пули на различных дальностях.

Сейчас посмотрите, насколько легко подумать, что цель находится в 750 ярдах, когда она на самом деле в 800 ярдах. Но эта ошибка в 50 ярдов (менее 10 процентов) приведет к тому, что пуля попадет в 32 дюймах ниже, значительный промах. Помните об этом, когда определяете дальности до цели.
По материалам книги «Совершенный снайпер. Учебное пособие для армейских и полицейских снайперов».
Maj. John L. Plaster, USAR (Ret.)
Стрельба всегда сопровождается ошибками.
Сегодня поговорим об ошибках стрельбы — конкретно об ошибках подготовки исходных данных и влиянии на них баллистики патрона.
Основными ошибками подготовки данных являются:
- Ошибка определения дальности до цели. Опытный стрелок определяет дальность (без приборов) со срединной ошибкой 10%, средний — 15%.
- Ошибка определения скорости ветра. Срединная ошибка составляет 1,5 м/с.
- Ошибка определения скорости цели — 20%.
- Ошибка определения курсового угла цели — 10° или 0,17 радиана.
Ошибка определения дальности.
Итак, стрелок глядя на бегущую фигуру (мишень №8) определил, что дальность до цели 500 метров и выставил прицел 5. Это совершенно не означает, что до цели 500 метров, если стрелок опытный то срединная ошибка составит 10% или 50 метров. Таким образом цель будет находится в интервале 450-550 метров с вероятностью 0,5, т.е. в половине случаев. Естественно, что в другой половине случаев, т.е. с вероятностью 0,5, цель будет находится вне этого интервала. Как ближе (вероятность 0,25), так и дальше (вероятность 0,25) этого интервала.
Пока все сказанное никак не зависит от оружия в руках стрелка, но настала пора определить отклонение СТП из-за этой ошибки. Как ни странно, но пули летают по кривой и превышение траектории над линией прицеливания прямо зависит от баллистики оружия, точнее в очень большой степени определяется патроном. Численно вертикальное отклонение СТП равно ошибке дальности умноженной на тангенс угла падения пули на дистанции выставленного прицела (т.е. в данном случае 500 м). Сам угол можно взять из основной таблицы оружия или определить сразу тангенс из таблицы превышения траекторий. Рассмотрим АКМ и АК74:
- Из таблицы превышений АКМ видно, что на 450 м (с прицелом 5) превышение 0,55 метра, а на 550 м понижение -0,83 метра. Таким образом за 100 м пути пуля падает на 1,38 метра, т.е. тангенс tg=(0,55-(-0,83))/100=0,0138. Умножим на ошибку в 50 метров и получим 50*0,0138=0,69 метра. С вероятностью 0,5 СТП отклонится по вертикали не более чем на 0,69 метра. С вероятностью 0,54 отклонение не выйдет за вертикальный габарит цели. (от центра до края цели 0,75 метра)
- Из таблицы превышений АК74 видно, что на 450 м (с прицелом 5) превышение 0,31 метра, а на 550 м понижение -0,42 метра. Таким образом за 100 м пули пуля падает на 0,73 метра, т.е. тангенс tg=(0,31-(-0,42))/100=0,0073. Умножим на ошибку в 50 метров и получим 50*0,0073=0,365~0,37 метра. С вероятностью 0,5 СТП отклонится по вертикали не более чем на 0,37 метра. С вероятностью 0,83 отклонение не выйдет за вертикальный габарит цели.
Как видно баллистика влияет на отклонение пули из-за ошибки определения дальности. На малых дистанциях отклонения пули малы сразу по двум причинам: а) малы ошибки, 10% от 200 метров и 10% от 500 это совершенно разные величины; б) на малых дальностях углы падения также малы. Но с ростом дальности ошибки быстро растут и разница между АК74 и АКМ становится все больше. Тут можно вспомнить и стрельбу на большие дальности, важнейшим условием результативности которой является очень точное измерение дальности до цели и скорости ветра, что без приборов практически невозможно. Какой толк от винтовки с «субминутной» кучностью на дальности 1000 м если у Вас нет дальномера и ошибка в определении дальности, в лучшем случае, составляет ±100 метров?
Ошибка определения скорости ветра.
Зная срединную ошибку — 1,5 м/с можно определить боковое срединное вероятное отклонение пули на определенной дальности. Для этого нам понадобится таблица поправок на изменение метеоусловий из все того же НСД или таблиц стрельбы ГРАУ. Итак, все теже АКМ и АК74, дистанция 500 метров:
- Из таблички для АКМ видно, что на 500 м снос ветром 10 м/с равен 3,4 метра, тогда снос ветром 1,5 м/с равен 3,4/10*1,5=0,51 метра. Т.е. с вероятностью 0,5 СТП отклонится в боковом направлении на расстояние не более 0,51 метра или с вероятностью 0,26 отклонение не выйдет за габарит цели (от центра до края цели 0,25 метра.).
- Из таблички для АК74 видно, что на 500 м снос ветром 10 м/с равен 2,18 метра, тогда снос ветром 1,5 м/с равен 2,18/10*1,5=0,33 метра. Т.е. с вероятностью 0,39 отклонение не выйдет за габарит цели.
Как и в случае с определением дальности на малых дистанциях отклонения достаточно малы, но с ростом дальности сильно увеличиваются.
Ошибка определения скорости цели Численно равна Еv=0,2Vц. В этот раз возьмем дистанцию поменьше, 300 метров думаю хватит. Бегущая фигура перемещается поперек линии стрельбы со скоростью
Vц=3 м/с на дистанции 300 метров. Ошибка определения скорости 20%, т.е. 0,2Vц=0,6 м/с. Боковое отклонение пули численно равно подлетному времени пули умноженному на ошибку 0,2tVц. И на величину этой ошибки также оказывает влияние баллистика, а конкретно подлетное время пули которе можно взять из основной таблицы в НСД.
- Для АКМ табличка дает t=0,52 с, таким образом бовокое отклонение составит 0,2*0,52*3=0,31 метра. С вероятностью 0,41 отклонение не выйдет за габарит цели.
- Для АК74 t=0,39 с. Бовокое отклонение составит 0,2*0,39*3=0,23 метра. С вероятностью 0,54 отклонение не выйдет за габарит цели.
Ошибка определения курсового угла цели. Eφ=0,17 радиан. Рассмотрим случай стрельбы по цели перемещающейся под углом к линии стрельбы. Дистанция 300 м, бегущая фигура перемещается со скоростью 3 м/с под углом φ=45°. Тогда бокове отклонение пули будет складываться из ошибки определения скорости цели и ошибки определения курсового угла по следующей формуле 
 , при угле φ=45° sinφ=cosφ=0,707. Как не трудно увидеть выражение под корнем не зависит от баллистики, зато подлетное время t зависит. Выражение под корнем будет равно 0,6^2*0,707^2+0,17^2*3^2*0,707^2=0,31, кв. корень 0,31=0,557 метра.
, при угле φ=45° sinφ=cosφ=0,707. Как не трудно увидеть выражение под корнем не зависит от баллистики, зато подлетное время t зависит. Выражение под корнем будет равно 0,6^2*0,707^2+0,17^2*3^2*0,707^2=0,31, кв. корень 0,31=0,557 метра.
- Для АКМ Evz=0,557t=0,557*0,52=0,29 метра. С вероятностью 0,44 отклонение не выйдет за габарит цели.
- Для АК74 Evz=0,557t=0,557*0,39=0,22 метра. С вероятностью 0,56 отклонение не выйдет за габарит цели.
Основной вывод — баллистика оружия оказывает большое влияние на вероятность попадания в цель по причине меньшего отклонения пуль из-за ошибок подготовки исходных данных. 5,45-мм автоматная пуля обладает более настильной траекторией, меньшим ветровым сносом и меньшим подлетным временем чем 7,62-мм автоматная пуля, в значительной степени именно эти факторы позволяют АК74 стрелять эффективней АКМа. Меньший импульс отдачи и вес патрона не относится к ошибкам подготовки, но забывать о этих факторах не стоит.
Рассматриваемая оптико-электронная стереоскопическая система измерения дальности (рисунок 1) содержит захватное устройство, состоящее из левой и правой цифровых камер, каждая из которых размещены на жестком стержне, и ЭВМ, выполняющую функцию вычислительного блока с измерительным приложением [3], совместно обеспечивающих возможность захвата стереоизображений и автоматическое измерение дальности до указанных пользователем объектов.
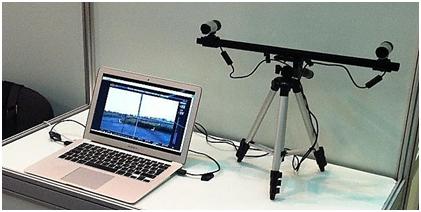
Рисунок 1. Внешний вид оптико-электронной
стереоскопической системы
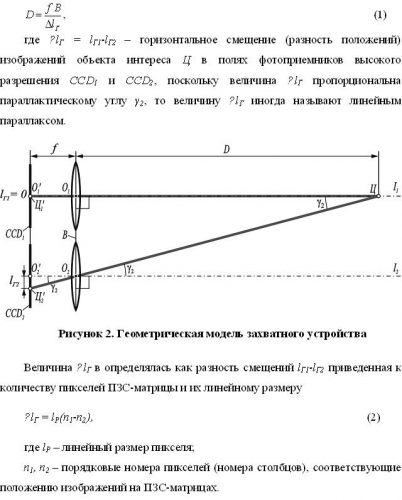
Дальность D (рисунок 2) до объекта Ц в определялась по величинам параллакса γ2, базы прибора В и фокусного расстояния объективов f по следующему выражению [1, с. 273, 2 с. 43]
Испытание оптико-электронной стереоскопической системы измерения дальности показало, что в целом ошибка определения дальности лежит в пределах расчетных значений [1, с. 273], но вместе с тем и выявило рад недостатков, а именно:
— для обеспечения точных измерений необходима предварительная настройка (калибровка) захватного устройства, заключающаяся в приведении оптических осей левой и правой камер к параллельному состоянию в пространстве, что было связано с достаточно большими временными затратами, кроме того, незначительные воздействия на захватное устройство приводили к необходимости проведения повторной калибровки;
— малейшее отклонение оптических осей камер от параллельного состояния в пространстве приводило к значительным ошибкам в измерении дальности, иногда вплоть до получения отрицательных значений;
— неоднократно при настроенном захватном устройстве наблюдались ошибки измерения, когда до явно расположенных на разном удалении объектов измеренная макетом дальность составляла одну и туже величину.
Помимо этого, на взгляд авторов, недостатком рассматриваемой оптико-электронной стереоскопической системы измерения дальности являлась необходимость постоянного наведения оптической оси левой камеры на объект интереса, что при проведении достаточно большого количества измерений до объектов расположенных в разных частях поле зрения значительно увеличивало время работы и способствовало «растройке» захватного устройства, а так же то, что для использования подобных систем в различных системах технического зрения для обеспечения высокоточных измерений необходимо осуществлять подбор по техническим данным двух идентичные камер, что накладывает определенные ограничения на практическую реализацию.
Для устранения причин возникновения выявленных недостатков был проведен анализ практического применения рассматриваемой оптико-электронной системы измерения дальности и выражений (1) и (2) положенных в основу её работы.
Если обеспечена строгая параллельность оптических осей камер, входящих в состав захватного устройства, то рабочую зону, т.е. зону пересечения полей зрений используемых камер, как показано на геометрической модели, представленной на рисунке 3,а, условно можно представить в виде совокупности четырёхугольников образованных при пересечении полей зрения отдельных элементов фоточувствительного приемника высокого разрешения, например пикселей ПЗС-матриц.
На рисунке 3,а ПЗС-матрицы CCD1 и CCD2 для наглядности представлены состоящими из девяти пикселей. Размеры четырехугольников определяют величину ошибки определения дальности. В месте с тем, как следует из выражений (1) и (2), в пределах рабочей зоны можно отобразить линии равных смещений, т.е. линий при нахождении в любой из точек которых объекта, до которого определяется дальность, смещение ∆lГ будет неизменно. Так, например, как показано на рисунке 3,а, при нахождении объекта интереса в любой из точек, принадлежащих линии ∆n=2, например, в точках Ц1 и Ц2, смещение изображений всегда будет равно двум линейным размерам пикселя. Из этого следует, что дальность до объекта определяется как расстояние по перпендикуляру от базовой линии О1О2. Это условие всегда необходимо учитывать, особенно в тех случаях, когда измерение дальности проводится до различных объектов относительно одной точки на местности, в которой установлена измерительная система.
При невыполнении условия параллельности оптических осей объективов используемых камер линии с одинаковыми смещениями принимают вид близкий к дуге (рисунок 3,б), что приводит к неоднозначности в определении дальности относительно базовой линии О1О2. Так из геометрической модели, представленной на рисунке 3,б видно, что до объекта Ц1, как и до объекта Ц2 дальности относительно базовой линии О1О2 составят D1, D2, при этом D1 ≠ D2, хотя из выражений (1) и (2) следует что дальности D1 и D2 должны быть равны, так как объекты Ц1 и Ц2 находятся на линии с одинаковыми смещениями изображений во всех её точках.
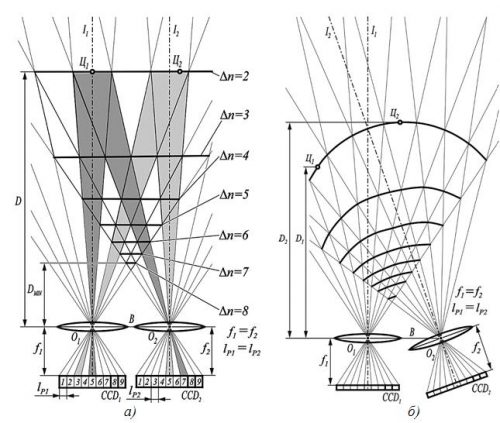
Рисунок 3. Геометрия линий равных смещений при:
а – идеально откалиброванном захватном устройстве;
б – при отклонении правой камеры от параллельного состояния
На рисунке 4,а—г иллюстрируются геометрия линий равных смещений в различных условиях: когда обе камеры имеют одинаковые параметры (фокусные расстояния объективов f и размеры пикселей lP), но их оптические оси I1, I2 или сходятся (рисунок 4,а) в плоскости измерений или расходятся (рисунок 4,б); когда оптические оси I1, I2 обеих камер параллельны, но сами камеры имеют объективы с различными фокусными расстояниями f1 ≠ f2 (рисунок 4,в); или когда уже размеры пикселей ПЗС-матриц CCD1 и ССD2 неодинаковы, то есть lP1 ≠ lP2 (рисунок 4,г).
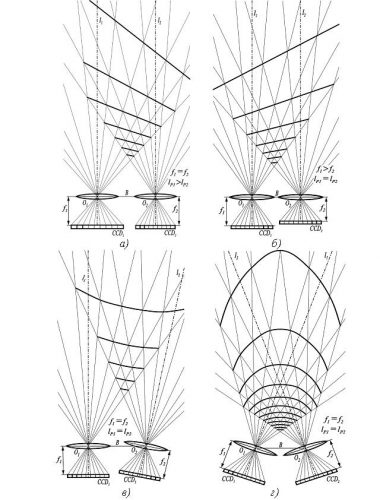
Рисунок 4. Геометрия линий равных смещений в различных условиях
Понятно, что в действительности с учетом разброса технических данных при изготовлении камер, точности проведенной калибровки захватного устройства будет наблюдаться ситуация объединяющая в себе в той или иной мере все приведенные на рисунке 4,а—г случаи.
Кроме этого, необеспечение параллельности оптических осей камер захватного устройства приводят к возникновению ошибок измерения дальности.
Рассмотрим этот случай.
Пусть в захватном устройстве используются две идентичных цифровых видеокамеры, подобранные таким образом, что разбросом их характеристик можно пренебречь, а оптические оси I1, I2, объективы оптическими центрами О1, О2, ПЗС-матрицы CCD1 и CCD2 определяют действительное положение камер захватного устройства в пространстве, тогда I1′, I2′, О2′, CCD2′ будут отражать положение элементов камер принимаемое в расчетах согласно выражения (1). Дальность D соответствует действительной дальности до объекта интереса, D′ – расчетной дальности.
Как показано на рисунке 5, оптическая ось левой (верхней) камеры I2′ отклонена от оси I1′, которую бы она занимала в случае абсолютной параллельности оптических осей, на некоторый угол α1. Изображение от объекта Ц, пройдя через оптический центр О2 объектива второй камеры, спроецируется на ПЗС CCD2 в точке, соответствующей номеру пикселя n2.
В месте с тем, формула расчета дальности (1) не имеет переменной, характеризующей отклонение оптической оси второй камеры, а это приведет к тому, что в вычислениях будет принято положение камеры соответствующее I2′, О2′ и CCD2′ не совпадающее с действительными I2, О2, CCD2, и характеризующая положение правой камеры отклонённой от действительного положение по часовой стрелке на угол α2′, когда оптические оси I1 и I2′ будут параллельны.
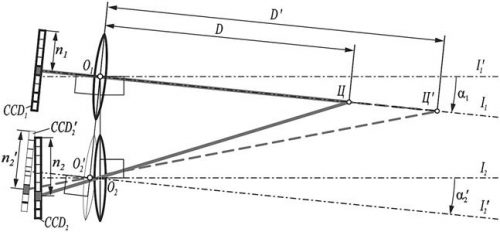
Рисунок 5. Возникновение ошибки измерения дальности
Проведя из пикселя матрицы CCD′2 с номером соответствующим действительно измеренному n2′=n2 через расчетный оптический центр объектива О2′ до пересечения с действительной оптической осью I1, на которой по условиям находится объект интереса Ц, получим точку расчетного положения объекта Ц′. Из представленной геометрической модели видно, что рассчитанная дальность D′ не будет соответствовать действительной дальности D, а значит будет допущена ошибка в определении дальности. При этом ошибка определения дальности, как видно из рисунка 5, будет тем значительнее, тем больше угол α1.
Работа по устранению выявленных источников возникновения ошибок и неоднозначности измерения дальности позволила ряд задач, заключающихся в обеспечении:
— безошибочного измерения дальности до объектов в условиях непараллельности оптических осей левой и правой камер, а также, когда левая и правая камеры имеют как одинаковые, так и различные технические данные, а именно фокусные расстояния объективов и параметры фоточувствительных приемников высокого разрешения;
— однозначности измерений дальностей до всех объектов независимо от их расположения в рабочей зоне.
Раскрытие решения указанных задач на взгляд авторов заслуживает отдельных публикаций, поэтому в данной статье не приведено.
Список литературы:
- Зубарь А.В., Программно-аппаратная реализация оптико-электронной стереосистемы определения дальности // Зубарь А.В., Кайков К.В., Майстренко В.А. // Омский научный вестник № 3 (123) – Омск: ОмГТУ, 2013. – с. 273-278.
- Коротаев, В. В. Телевизионные измерительные системы // В. В. Коротаев, А. В. Краснящих // Учеб. пособие. – СПб.: СПбГУ ИТМО, 2008. – с. 43–47.
- Программа вычисления дальности до объектов интереса по изображениям с двух цифровых видеокамер // Свидетельство о государственной регистрации ПрЭВМ № 2013661916 от 18 декабря 2013 г.[schema type=»book» name=»Источники возникновения ошибок и неоднозначности измерений дальности оптико-электронной стереоскопической системой » author=»Зубарь Алексей Владимирович, Кайков Кирилл Владимирович, Аппинг Гарри Анатольевич» publisher=»БАСАРАНОВИЧ ЕКАТЕРИНА» pubdate=»2017-06-20″ edition=»ЕВРАЗИЙСКИЙ СОЮЗ УЧЕНЫХ_ 30.12.2014_12(09)» ebook=»yes» ]
σРРВ —
ошибка, обусловленная особенностями распространения радиоволн в атмосфере;
σинс — инструментальная ошибка, обусловленная не
идеальностью работы элементов и узлов РЛС;
σдин —
динамическая ошибка, обусловленная изменением местоположения цели за время
измерения.
12.2.
ОШИБКИ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И ТЕХНИЧЕСКИЕ РЕШЕНИЯ, ОБЕСПЕЧИВАЮЩИЕ ИХ СНИЖЕНИЕ
12.2.1.
Потенциальная ошибка измерения дальности
Эта
ошибка характеризует предельно достижимую точность и определяется отношением
сигнал — шум и шириной спектра зондирующего сигнала:
(12.7)
где Пэ — эффективная ширина спектра
зондирующего сигнала;
(Рс/Рш)вх изм —
отношение сигнал — шум на входе измерительного устройства.
Эффективная
ширина спектра зондирующего сигнала определяется выражением
(12.8)
где — спектр сигнала.
Она связана с шириной спектра сигнала Пи
соотношением
Пэ= кПи к
= 1,7 …
3. (12.9)
В частности,
для колоколообразного импульса, спектр которого описывается соотношением
(12.10)
эффективная
ширина спектра
где Пи = 1/τи — ширина спектра импульса на уровне 0,46.
Для импульсов
с равномерным в пределах Пи спектром
Наибольшая точность измерения
дальности обеспечивается при использовании сигнала, состоящего из двух синусойд
с частотами f1 и f2, разнесенными на интервал, равный Пи
(фазовый метод дальнометрии). В этом случае Пэ
= πПи
= 3,14 Пи. Для импульсных РЛС обнаружения к =1,7…2.
Отношение сигнал—шум на входе
измерительного устройства для границы зоны обзора равно параметру обнаружения γ1 (см.
§4.6), а на дальностях r
< R оно будет возрастать в
соответствии с выражением
(12.11)
Подставив
(12.9), (12.11) в (12.7), получим зависимость потенциальной ошибки измерения
дальности от параметров РЛС:
(12.12)
Для уменьшения этой ошибки необходимо увеличивать ширину
спектра зондирующего сигнала и максимальную дальность действия РЛС.
Пути увеличения дальности рассмотрены в гл. 2. Основной
из них — увеличение энергии, излучаемой в зону обзора. Одним из перспективных
путей, одновременно удовлетворяющим перечисленным выше требованиям, является
использование в РЛС сложных сигналов (ЛЧМ или ФКМ).
Потенциальная ошибка измерения дальности в РЛС
обнаружения даже при использовании сравнительно узкополосных сигналов обычно не
превышает значений σRпот
= 50 … 150 м и составляет незначительную часть (10… 15%) от общей ошибки
измерения дальности при визуальном съёме информации. При автосъёме она может
вносить существенный вклад в общую ошибку измерения.
12.2.2.
Ошибка измерения дальности за счет особенностей распространения радиоволн
В реальной атмосфере из-за имеющихся неоднородностей
изменяется скорость и нарушается прямолинейность распространения радиоволн, что
приводит к возникновению ошибки измерения дальности [40]. В РЛС обнаружения
ошибка составляет σRРРВ
= 10…15 м и ею можно пренебречь, поскольку она существенно меньше
потенциальной.
12.2.3.
Инструментальная ошибка измерения дальности
Составляющими инструментальной
ошибки измерения дальности являются:
ошибка за счет изменения времени запаздывания сигнала при
прохождении через приемный тракт;
ошибка съема координат.
Ошибка за счёт изменения времени запаздывания в приёмном
тракте имеет систематическую и случайную составляющие. Систематическая
составляющая обусловлена конечным значением полосы пропускания усилительных
каскадов (главным образом УПЧ), что приводит к растягиванию фронтов и задержке
сигналов. Время запаздывания в приёмном тракте РЛС обычно составляет величину tзап
пр = = (0,3…3)τи. Оно может быть скомпенсировано путём
соответствующей расстановки импульсов запуска оконечного устройства.
Случайная составляющая времени задержки обусловлена изменением
полосы пропускания каскадов из-за изменения их режимов работы вследствие
нестабильностей источников питания, ухода параметров элементов под действием
дестабилизирующих факторов, старения деталей и т. д. Среднее квадратическое
значение нестабильности времени запаздывания составляет σt зап = 0,1 …0,2 мкс,
что соответствует ошибке измерения дальности 15…30 м.
Ошибка,
возникающая при съёме координат, зависит от вида съёма.
При визуальном съёме она обусловлена:
неточностью формирования масштабных отметок дальности
(МОД);
неточностью определения центра отметки;
интерполяцией положения центра отметки относительно МОД.
Для
исключения ошибок измерения дальности, связанных с нелинейностью развертки
индикатора, осуществляют электрическую калибровку шкалы дальности путём
формирования МОД различных градаций. Обычно устройство формирования МОД
выполняется по структурной схеме (рис. 12.1). С приходом импульса запускa генератор прямоугольных импульсов формирует импульс с длительностью,
равной времени прямого хода развертки индикатора. В течение этого времени
задающий генератор генерирует непрерывные колебания с частотой f0, которые затем
ограничиваются, дифференцируются и используются для запуска формирователя.