Простые регуляторы
Аналоговый
регулятор можно описать передаточной
функцией того же типа, что и сам физический
процесс. В простейшем случае входной
сигнал регулятора — это ошибка
выходной величины физического процесса.
Для работы с
передаточными функциями используется
преобразование Лапласа.
Передаточная
функция регулятора GREG(s)
определяется
как отношение выходной
величины регулятора U(s)
и
входной ошибки E(s)
![]()
Это
простейший случай управления
с обратной связью.
В общем случае регулятор имеет две
входные величины — измеренное (текущее)
значение У(т. е. выходной сигнал
технического процесса) и опорное значение
Uc,
а также
одну выходную величину
— управляющий сигнал U.
Однако
простейший регулятор использует лишь
разность между двумя входными величинами.
С
математической точки зрения передаточная
функция GREG(s)
рассматривается
точно
так же, как любая передаточная функция
процесса G(s).
Как
уже упоминалось, их
принципиальное различие в том, что
коэффициенты передаточной функции
регулятора GREG{s)
можно
изменять
(настраивать). Проектировщик системы
управления
должен подобрать эти параметры так,
чтобы замкнутая система — физический
процесс и регулятор — работала в
соответствии с установленными
требованиями. Замкнутая
система, изображенная на рис. 6.2, имеет
передаточную функцию
![]()
Очевидно,
что чем больше параметров содержит
GREG(s),
тем
больше степеней свободы имеет регулятор.
Настраивая эти параметры, поведение
передаточной функции
замкнутой системы можно при желании
изменять в достаточно широких пределах.
В дальнейшем обсуждается уровень
сложности регулятора, необходимый для
достижения
заданных характеристик.
Упреждающее управление по опорному значению
Простейшая
система управления реагирует только
на ошибку
e(t)
и
не использует по отдельности два входных
сигнала — опорное значение и
выходной параметр процесса.
Однако
ошибка может возникнуть по двум причинам,
одна из которых — изменение
опорного или задающего сигнала uc(t),
а
вторая — изменение нагрузки или
какое-либо
другое возмущение в системе, вызывающее
изменение выходного сигнала y(t).
Изменение
опорного значения — это известное
возмущение. Если регулятор может
использовать соответствующую информацию,
то это, вообще говоря, позволяет улучшить
характеристики замкнутой системы —
физический процесс и регулятор. В
этом смысл упреждающего
управления.
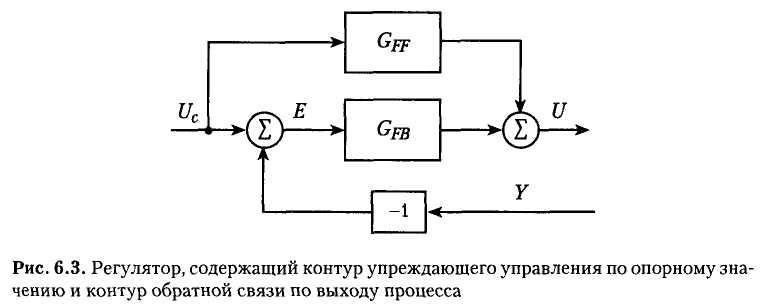
Рассмотрим
регулятор [уравнение (6.4)], состоящий из
двух частей. Контур обратной
связи GpB(s)
представляет
собой исходный регулятор, отрабатывающий
ошибку е.
Так
называемый контур упреждения GFF(s)
контролирует
изменения опорного значения
и прибавляет к управляющему сигналу
поправочный член, с тем чтобы вся система
реагировала
более оперативно на изменения опорного
сигнала (рис. 6.3). То есть управляющий
процессом сигнал U(s)
представляет
собой сумму двух сигналов
![]()
Это выражение
можно переписать в виде

где
UFi
—
упреждающий сигнал по опорному значению
(задающему воздействию), a
Upg
— сигнал
обратной связи. Регулятор имеет два
входных сигнала Uc(s)
и
Y(s)
и,
следовательно,
может быть описан двумя передаточными
функциями Gp^(s)
и
G^(s)
(рис.
6.4).

![]()
Это выражение
можно преобразовать следующим образом
![]()
Поскольку
регулятор, соответствующий уравнению
(6.4), имеет больше настраиваемых
коэффициентов, чем простейший регулятор
уравнения (6.3), разумно предположить,
что замкнутая система имеет лучшие
характеристики. Передаточную функцию
полного контура управления можно
получить из рис. 6.4
Положение
полюсов системы с обратной связью можно
изменить с помощью регулятора
GR(s),
а
упреждающий регулятор GFi(s)
добавляет
системе новые нули. Отсюда следует, что
вся система может быстро реагировать
на изменения опорного сигнала,
если GFy(s)
выбрана
должным образом.
Пропорционально-интегрально-дифференциальный
(ПИД)
регулятор — наиболее распространенная
структура регулятора в управлении
процессами и сервомеханизмами. Поэтому
он будет подробно рассмотрен
в нескольких следующих разделах.
Параметры
полиномов R(s),
S(s)
и
T(s)
можно
выбрать при этом таким образом, что
![]()
ПИД-регулятор
вырабатывает выходной сигнал, являющийся
суммой трех составляющих
пропорционального регулирования,
регулирования
по интегралу
и
регулирования по производной. Первая
часть Up(t)
пропорциональна
ошибке выходной величины, т. е. разности
между выходной величиной и опорным
значением, вторая часть
Uj(t)
— интегралу
по времени ошибки выходной величины, а
третья часть uD(t)
—
производной ошибки.
Уравнение
классического ПИД-регулятора имеет вид

Параметр
К
— усиление
регулятора,
Ti
— постоянная
времени интегрирования,
a
Td
—
постоянная
времени дифференцирования.
Коэффициент
U0
есть
поправочное
значение
или
смещение,
настраивающее
средний уровень выходного сигнала
регулятора.
Некоторые
регуляторы, особенно старые модели,
вместо усиления имеют настройку
полосы
пропорциональности,
которая определяется
как РВ
=
100/К и обычно выражается в процентах.
Это определение справедливо лишь
в том случае, если К
безразмерно.
Постоянная
времени интегрирования Ti
присутствует
в знаменателе уравнения (6.12)
— таким образом, значения отдельных
слагаемых уравнения регулятора
оказываются соизмеримы. Подтверждение
этому хорошо видно из переходной
характеристики
пропорционально-интегрирующего (ПИ)
регулятора.
Немедленно после скачка ошибки e(t)
на
выходе регулятора имеем К*
е. По
прошествии
времени Ti
выходная
величина регулятора становится вдвое
больше (рис.
6.9). ПИ-регулятор часто символически
изображается его переходной характеристикой.

Регулятор можно
также описать с помощью преобразования
Лапласа. Применяя его к уравнению (6.12),
получим

где
E(s)
— изображения
Лапласа для компонент
сигнала up(t),
uI(t)
и
uD(t)
соответственно.
Степень числителя превосходит степень
знаменателя, поэтому усиление регулятора
стремится к бесконечности при высоких
частотах — это следствие дифференциальной
составляющей. На практике дифференцирование
нельзя выполнить точно, поэтому
используется аппроксимация первого
порядка с постоянной времени TD
и уравнение ПИД-регулятора принимает
вид
![]()
ПИД-регулятор
представляет собой частный случай
обобщенного регулятора [уравнение
(6.7)] и может быть выражен через полиномы
R,
S
и Т. Уравнение
(6.14) можно переписать в виде
![]()
В
результате получим ПИД-регулятор

В
действительности большинство технических
процессов имеют порядок выше, чем
второй, однако ПИД-регуляторы часто
можно успешно использовать и для
управления
такими процессами. Это связано с тем,
что многие процессы, имеющие в
действительности динамику более высокого
порядка, приближенно ведут себя подобно
системам второго порядка. В системах,
которые нельзя аппроксимировать
уравнениями
второго порядка, применение ПИД-регуляторов
не рекомендуется. В
частности, это относится к механическим
системам, имеющим несколько колебательных
составляющих движения.
Соседние файлы в папке Лекции КТУП
- #
- #
- #
ошибка выходной величины
- ошибка выходной величины
-
ошибка выходной величины
ошибка на выходе
выходная ошибка
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
- информационные технологии в целом
Синонимы
- ошибка на выходе
- выходная ошибка
Справочник технического переводчика. – Интент.
2009-2013.
Смотреть что такое «ошибка выходной величины» в других словарях:
-
время — 3.3.4 время tE (time tE): время нагрева начальным пусковым переменным током IА обмотки ротора или статора от температуры, достигаемой в номинальном режиме работы, до допустимой температуры при максимальной температуре окружающей среды. Источник … Словарь-справочник терминов нормативно-технической документации
-
Теория автоматического управления — Содержание 1 История 2 Основные понятия 3 Функциональн … Википедия
-
Следящая система — система автоматического регулирования (управления), воспроизводящая на выходе с определённой точностью входное задающее воздействие, изменяющееся по заранее неизвестному закону. С. с. может иметь любую физическую природу и различные… … Большая советская энциклопедия
-
Автоматическое управление — в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. А. у. широко применяется во многих… … Большая советская энциклопедия
-
Коэффициент корреляции — (Correlation coefficient) Коэффициент корреляции это статистический показатель зависимости двух случайных величин Определение коэффициента корреляции, виды коэффициентов корреляции, свойства коэффициента корреляции, вычисление и применение… … Энциклопедия инвестора
-
ГОСТ Р 8.726-2010: Государственная система обеспечения единства измерений. Датчики весоизмерительные. Общие технические требования. Методы испытаний — Терминология ГОСТ Р 8.726 2010: Государственная система обеспечения единства измерений. Датчики весоизмерительные. Общие технические требования. Методы испытаний оригинал документа: 3.1.3 весоизмерительный датчик (load cell): Преобразователь силы … Словарь-справочник терминов нормативно-технической документации
-
ПИД-регулятор — Схема, иллюстрирующая принцип работы ПИД регулятора. Коэффициенты перед интегралом и производной опущены для большей наглядности иллюстрации. Пропорционально интегрально дифференциальный (ПИД) регулятор устройство в управляющем контуре с… … Википедия
-
Printf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки … Википедия
-
Snprintf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки значений… … Википедия
-
Sprintf — printf обобщённое название семейства функций или методов стандартных или широкоизвестных коммерческих библиотек, или встроенных операторов некоторых языков программирования, используемых для форматного вывода вывода в различные потоки значений… … Википедия
К системам автоматического регулирования (САР) предъявляются требования не только
устойчивости процессов регулирования. Для работоспособности системы не менее необходимо, чтобы процесс автоматического регулирования осуществлялся при обеспечении определенных показателей качества процесса управления.
Если исследуемая САР является устойчивой, возникает вопрос о том, насколько качественно происходит регулирование в этой системе и удовлетворяет ли оно технологическим требованиям обьекта управления.На практике качество регулирования определяется визуально по графику переходной характеристики. Однако, имеются точные но более сложные математические методы, дающие конкретные числовые значения (которые не рассматриваются в данной методике).
Классификация показателей качества состоит из нескольких групп:
- прямые — определяемые непосредственно по переходной характеристике процесса,
- корневые — определяемые по корням характеристического полинома,
- частотные — по частотным характеристикам,
- интегральные — получаемые путем интегрирования функций.
Прямыми показателями качества процесса управления, определяемые непосредственно по
переходной характеристике являются:
- Установившееся значение выходной величины Yуст,
- Степень затухания ?,
- Время достижения первого максимума tmax,
- Время регулирования tp,
- Ошибка регулирования Ест (статистическая или среднеквадратическая составляющие),
- Перерегулирование у,
- Динамический коэффициент регулирования Rd,
- Показатель колебательности М.
Например, переходная характеристика, снятая на объекте управления при отработке ступенчатого воздействия, имеет колебательный вид и представлена на рис.1.
Рисунок 1 — Определение показателей качества по переходной характеристике
Установившееся значение выходной величины Yуст
Установившееся значение выходной величины Yуст определяется по переходной характеристике,представленной на рис.1.
Степень затухания ?
Степень затухания ? определяется по формуле:
где А1 и А3 — соответственно 1-я и 3-я амплитуды переходной характеристики рис.1.
Время достижения первого максимума tmax
Время достижения первого максимума tmax определяется по переходной характеристике,представленной на рис.1.
Время регулирования tp
Время регулирования tp определяется согласно рис.1 следующим образом:Находится допустимое отклонение Д, например, задано Д = 5%Yуст и строится «зона» толщиной 2 Д(см. рис.1). Время tp соответствует последней точке пересечения Y(t) с данной границей. То есть время,когда колебания регулируемой величины перестают превышать 5 % от установившегося значения.
Настройки регулятора необходимо выбирать так, чтобы обеспечить минимально возможное значение общего времени регулирования, либо минимальное значение первой полуволны переходного процесса.
В непрерывных системах с типовыми регуляторами это время бывает минимальным при так называемых оптимальных апериодических переходных процессах. Дальнейшего уменьшения времени регулирования до абсолютного минимума можно достичь при использовании специальных оптимальных по быстродействию систем регулирования.
Ошибка регулирования Ест
Статическая ошибка регулирования Ест = Ув — Ууст, где Ув — входная величина (см. рис.1).В некоторых САР наблюдается ошибка, которая не исчезает даже по истечении длительногоинтервала времени — это статическая ошибка регулирования Ест. Данная ошибка не должна превышатьнекоторой наперед заданной величины. У регуляторов с интегральной составляющей ошибки в установившемся состоянии теоретическиравны нулю, но практически незначительные ошибки могут существовать из-за наличия зоннечувствительности в элементах системы.
Перерегулирование у
Величина перерегулирования у зависит от вида отрабатываемого сигнала.При отработке ступенчатого воздействия (по сигналу задания) – см. рис.1 величина перерегулирования у определяется по формуле:
где значения величин Ymax и Yуст определяются согласно рис.1.
При отработке возмущающего воздействия, величина перерегулирования у определяется изсоотношения:
где значения величин Xm и X1 определяются согласно рис. 2.
Рисунок 2 — График переходного процесса при отработке возмущения
Динамический коэффициент регулирования Rd
Динамический коэффициент регулирования Rd определяется из формулы:
где значения величин Y1 и Y0 определяются согласно рис. 3.
Рисунок 3 — К понятию динамического коэффициента регулирования
Величина динамического коэффициента Rd характеризует степень воздействия регулятора напроцесс, т.е. степень понижения динамического отклонения в системе с регулятором и без него.
Показатель колебательности М
Показатель колебательности M характеризует величину максимума модуля частотной передаточной функции замкнутой системы (на частоте резонанса) и, тем самым, характеризует колебательные свойства системы. Показатель колебательности наглядно иллюстрируется на рисунке 4.
Рисунок 4 — График модуля частотной передаточной функции замкнутой системы
Условно считается, что значение М=1,5-1,6 является оптимальным для промышленных САР, т.к. вэтом случае у обеспечивается в районе от 20% до 40%. При увеличении значения M колебательность всистеме возрастает.
В некоторых случаях нормируется полоса пропускания системы щп, которая соответствует уровню усиления в замкнутой системе 0,05. Чем больше полоса пропускания, тем больше быстродействие замкнутой системы. Однако при этом повышается чувствительность системы к шумам в канале измерения и возрастает дисперсия ошибки регулирования.
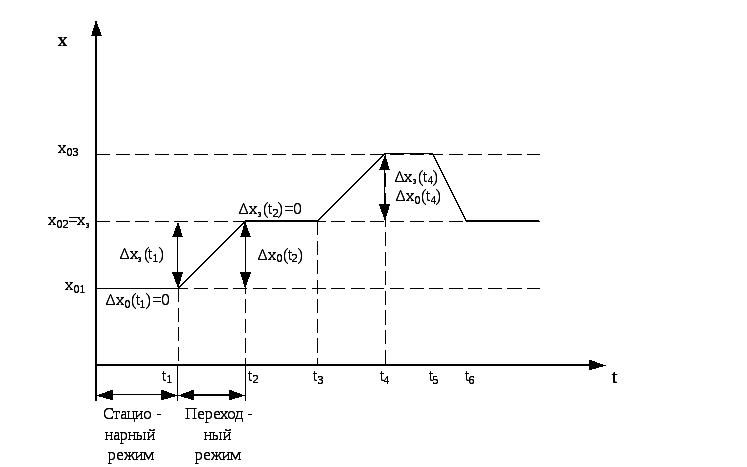
Действительные
значения регулируемой величины в
реальных САР отличаются от предписанных.
Разность между предписанным и
действительным значениями регулируемой
величины называется ошибкой
регулирования.
∆xз(t)
= xз
– x(t)
– ошибка регулирования
хз
– предписанное (заданное) значение
управляемой величины;
x(t)
– ее текущее значение
В
процессе функционирования САР может
переходить от одного состояния,
принимаемого за исходное, в другое.
Разность между текущими значениями
регулируемой величины и значением,
соответствующим исходному состоянию,
принято называть отклонением регулируемой
величины
∆x0(t)
= x(t)
– x0(t) (1.3)
где
xo
– значение регулируемой величины в
исходном состоянии.
x0(t)
– исходное значение регулируемой
величины.
|
|
|
Рис. |
1.4. Статическое и астатическое регулирование
В
зависимости от того, является или нет
ошибка регулирования функцией возмущающего
воздействия в установившемся режиме,
различают статическое
и астатическое
регулирование.
При
статическом регулировании ошибка
регулирования возрастает с увеличением
значения возмущающего воздействия.
Пример статического регулирования
приведен на рис. 1.4, а).
|
|
|
а) |
|
|
|
б) |
|
|
|
в) |
|
Рис. |
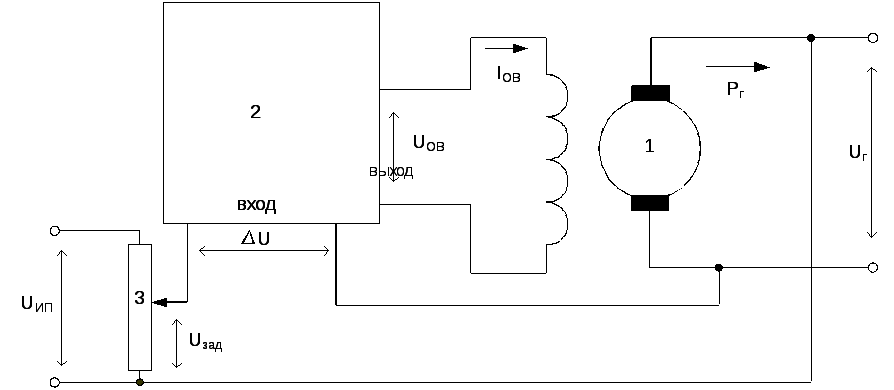
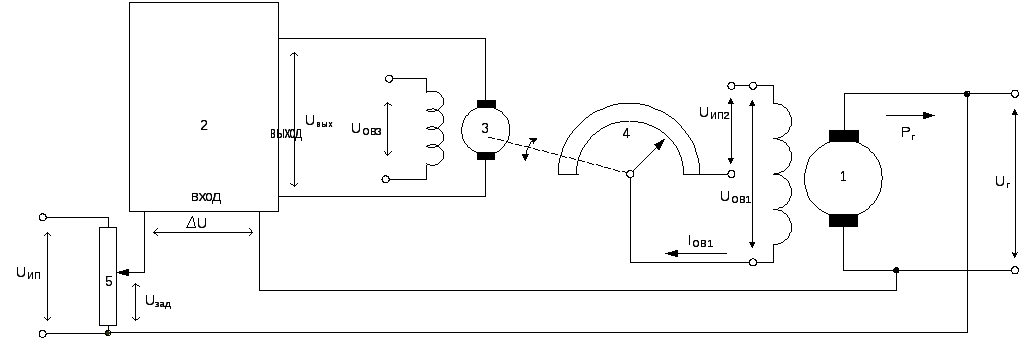
Принцип
действия этого регулятора достаточно
ясно виден из рассмотрения схемы и
особых пояснений не требует. Заметим
лишь, что требуемого возбуждение
генератора 1 осуществляется путем
изменения входного сигнала (ΔU)
электронного усилителя 2. В свою очередь
этот сигнал пропорционален отклонению
регулируемого параметра Uг
от заданного значения Uзад
(ΔU=Uг–Uзад).
Поэтому такое отклонение, т.е. наличие
ΔU,
является неизбежным и должно быть тем
больше, чем больше изменяется величина
внешнего возмущения Pг.
Очевидно, что это отклонение регулируемого
параметра от заданного значения
сохраняется также и в установившемся
режиме.
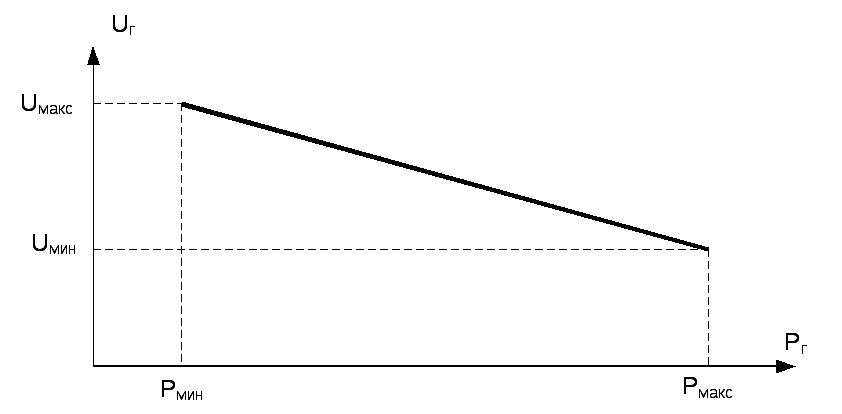
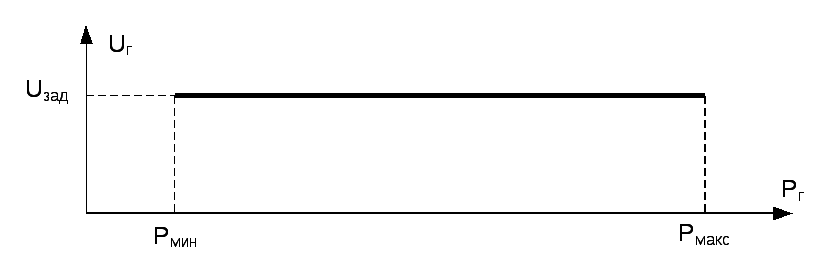
Рабочая
характеристика (зависимость напряжения
генератора от нагрузки – активной
мощности Pг)
статического регулятора приведена на
рис. 1.4, б).
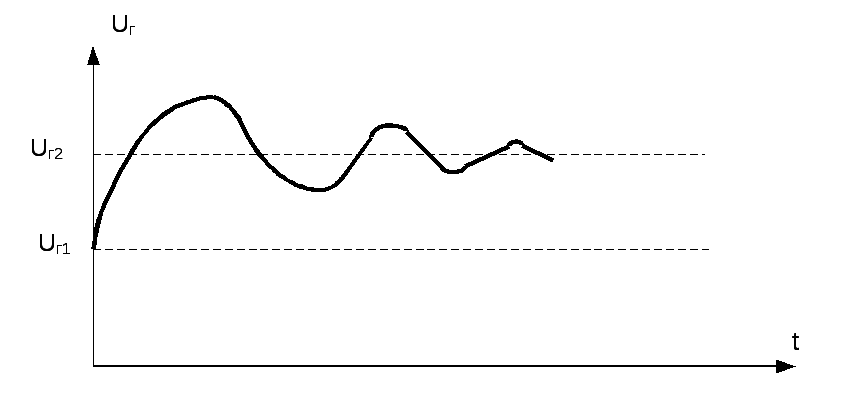
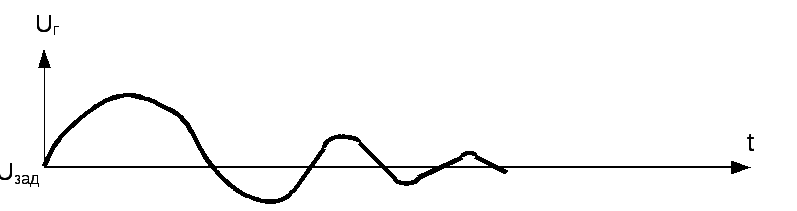
На
рис. 1.4, в)
показан переходный процесс в системе
при уменьшении нагрузки генератора.
Регулированием
с астатической
характеристикой
называется такое регулирование, при
котором в установившемся состоянии
системы отклонение регулируемого
параметра от заданного значения равно
нулю при любой величине внешнего
возмущения. Равновесие системы имеет
место всегда при заданном значении
регулируемого параметра.
Пример
астатического регулирования приведен
на рис. 1.5, а).
|
|
|
а) |
|
|
|
б) |
|
|
|
в) |
|
Рис. |
Характеристика
астатического регулятора приведена на
рис. 1.5, б),
а кривая переходного процесса – на рис.
1.5, в).
При
увеличении нагрузки на генераторе, т.е.
увеличении активной мощности генератора
Pг,
уменьшается напряжение на его выводах
Uг,
что приводит к появлению отклонения
регулируемого параметра Uг
от заданного значения Uзад
(ΔU=Uг–Uзад).
Параметр Uзад
задается
регулировочным реостатом 5. При этом
появляется напряжение на якоре двигателя
постоянного тока Uвых,
и двигатель начинает перемещать контакт
регулировочного реостата 4 по часовой
стрелке, что приводит к увеличению тока
возбуждения генератора IОВ1,
а значит, и напряжения на его выводах
Uг.
Параметр Uг
будет увеличиваться до тех пор, пока
ошибка регулирования ΔU
не станет равной 0.
Астатические
САР обеспечивают высокую точность
регулирования. Однако по сравнению со
статическими они являются более сложными
и инерционными, т.е. процессы регулирования
в них являются замедленными.
1.5.
Линейные и нелинейные системы. Линеаризация
уравнений
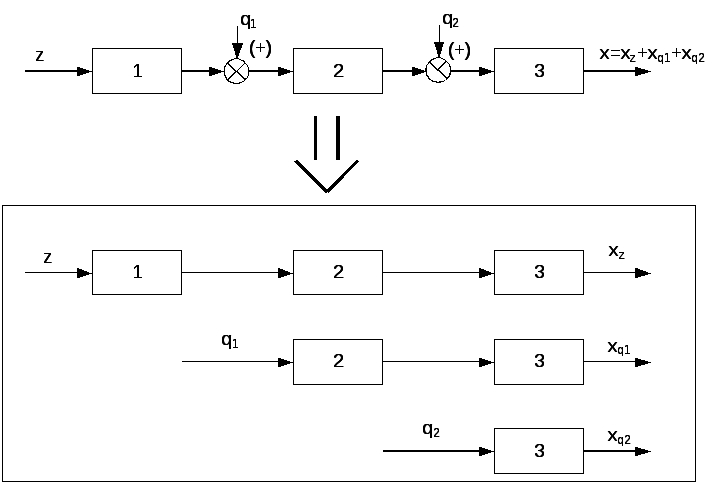
Системы,
процессы в которых могут быть описаны
линейными дифференциальными уравнениями
с постоянными коэффициентами, называются
линейными.
Для линейных систем применим принцип
суперпозиции, позволяющий рассматривать
независимое прохождение воздействий,
что дает существенное упрощение (рис.
1.6).
|
|
|
Рис. |
Нелинейной
называется система, для описания
процессов в которой приходится применять
одно или несколько нелинейных уравнений.
К нелинейным относятся уравнения,
коэффициенты которых зависят от значений
переменных величин или их производных,
а также уравнения, содержащие произведения
или степени (выше первой) этих величин.
Строго
говоря, линейных САУ в технике практически
нет или очень мало. Однако большинство
систем при определенных условиях могут
рассматриваться как линейные. Так, если
оценивать поведение системы при малых
отклонениях величин от исходных значений,
то в большинстве случаев имеющей место
нелинейностью можно пренебречь. Такая
возможность имеет математическое
обоснование.
Пусть
имеем некоторую непрерывную функцию
F(x)
(рис. 1.7).
Если
аргумент X
получил приращение ΔX
от исходного значения Xo,
то функция получит приращение ΔF(X).
Новое значение функции F(X)
можно разложить в ряд Тейлора:

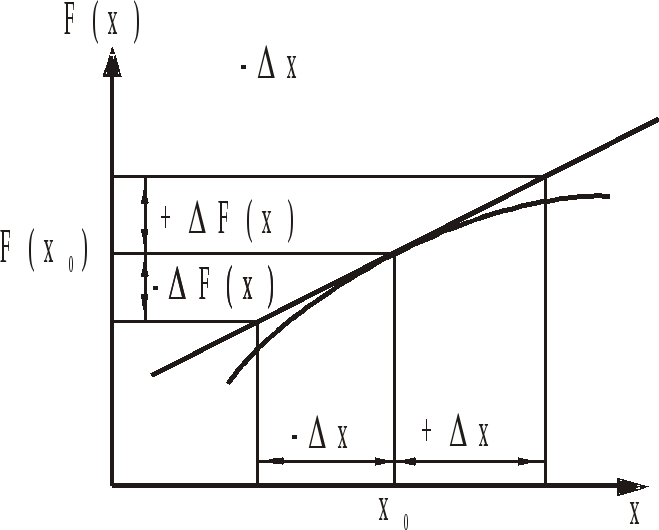
Рис.
1.7. Пример линеаризации нелинейной
функции
При
малых значениях Δx
можно ограничиться только первыми двумя
членами разложения, т.к. остальные имеют
более высокий порядок малости, т.е. можно
считать
![]() ,
,
где
![]() .
.
Теоретически
это означает, что на интервале ±Δx
(рис. 1.6) кривая F(x)
заменяется прямой линией, являющейся
касательной при x=xo.
Таким
образом, если составлять уравнение
системы не для полных значений величин,
а только для отклонений, то эти уравнения
будут линейными. Такая операция называется
линеаризацией
уравнений.
Следует, однако, отметить, что это
справедливо только для тех случаев,
когда нелинейные функции являются
непрерывными и имеют непрерывные
производные при x=xo.
Пример
линеаризации нелинейного элемента
системы.
В
качестве типового элемента, уравнение
которого подлежит линеаризации, возьмем
RL-элемент,
часто встречающийся в электрических
системах регулирования и изображенный
на рис. 1.8, а). Пусть входной и выходной
величинами такого элемента являются
напряжения.
|
|
|
|
а) |
б) |
|
Рис. |
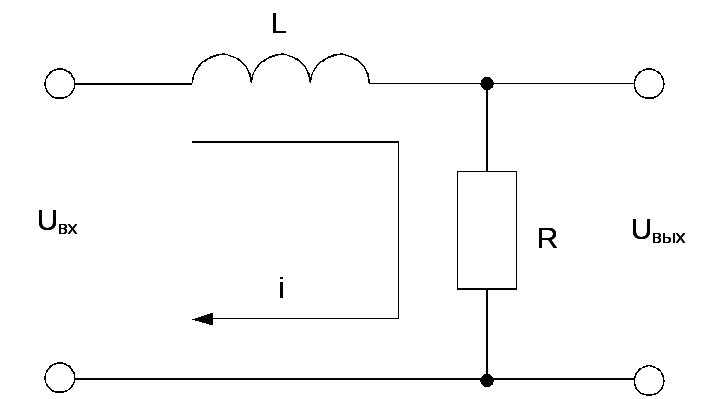
Предположим
сначала, что активные сопротивления и
индуктивность не зависят от протекающего
через них тока, т.е. будем считать, что
элемент является линейным.
Тогда
дифференциальное уравнение элемента
в случае, если потокосцепление
катушки
элементазависит от тока линейно, т.е.
если индуктивность L=/i
не зависит от тока и является величиной
постоянной, имеет вид:
![]()
Обозначив
![]()
и
![]() ,
,
учитывая, что
![]() ,
,
и пользуясь операторной (символической)
формой записи, в которой принято
![]() ,
,
получим:
|
|
(1.3) |
Предположим
теперь, что в рассматриваемом примере
индуктивность зависит от тока и,
следовательно, элемент является
нелинейным. Тогда уравнение (1.3) для
такого элемента неправомерно, ибо
потокосцепление
зависит от тока нелинейно и, следовательно,
L=/i
есть величина переменная. Для
усатновившегося режима элемента при
входном постоянном напряжении uвх
потокосцепление 0
тоже постоянно во времени и, следовательно,
![]() .
.
Тогда можно написать:
![]() .
.
Изменение
входного напряжения повлечет за собой
изменение тока и выходного напряжения.
Текущие
значения uвх
и uвых
и i
можно представить так:
![]() ;
;
![]() ;
;
![]() ,
,
где
Δuвх,
Δuвых
и Δi
– отклонения
соответствующих величин от их
установившихся значений.
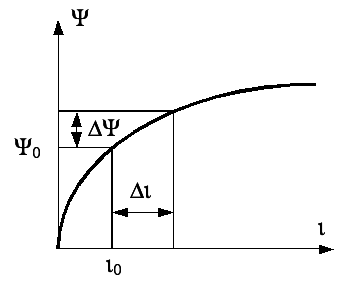
Пусть
потокосцепление является нелинейной
функцией тока, как это показано на рис.
1.8, б).
Эту функцию можно разложить в ряд:
|
|
(1.4) |

При
достаточно малых отклонения тока можно
ограничиться первыми двумя членами
ряда. Величина
![]()
определяется тангенсом угла наклона
касательной к кривой, приведенной на
рис. 1.8,б), в
точке с абсциссой i0.
Обозначив
динамическую индуктивность элемента
для тока i0
через Lд,
т. е.
![]() ,
,
можем написать:
![]() .
.
Так
как
![]() ,
,
то будем иметь:
![]() .
.
Исходное
уравнение запишется теперь так:
![]() ,
,
или,
подставляя ранее найденное выражение
для uвых0,
получим:
![]() .
.
Последнее
выражение является линейным дифференциальным
уравнением с постоянными коэффициентами,
которое можно записать в операторной
форме так:
|
|
(1.5) |
где
![]()
и k=1.
Оно
справедливо только для малых отклонений
входной и выходной величины относительно
начального значения uвх0.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
РАЗОМКНУТЫЕ И ЗАМКНУТЫЕ САУ.
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ.
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Под управлением технологическим процессом понимается совокупность операций, необходимых для осуществления таких целей, как пуск и остановка технологического процесса, поддержание какого-либо параметра процесса на заданном уровне, изменение параметра по заданной программе и т.п.
Установку, машину, агрегат, в котором протекает исследуемый технологический процесс, называют объектом управления.Управление может быть ручным или автоматическим. В первом случае операции управления осуществляет человек, а во втором – управляющее устройство. Сочетание объекта управления и управляющего устройства образует систему автоматического управления (САУ).
Рис.11.1. К понятию системы автоматического управления
На работу системы автоматического управления влияют различные воздействия. Будем называть их входными воздействиями, входными величинами или просто входами (xвх) (рис.11.1).
Параметры процесса, которые в той или иной степени характеризуют его качество и изменяются под действием входных величин, будем называть выходными величинами или просто выходами(xвых). Входные воздействия, которые нарушают заданный закон изменения выходных величин, будем называть возмущающими воздействиями или просто возмущениями. Возмущения можно подразделить на два вида: нагрузку (Н) и помехи (П). Изменение нагрузки обычно обусловлено технологическим процессом, а помехи вызываются изменениями внешних условий (например, температуры окружающей среды) или свойств отдельных элементов системы.
Воздействие управляющего устройства на объект управления называется управляющим воздействием (У).Оно также относится к входным воздействиям.
ОБРАТНЫЕ СВЯЗИ.
При построении системы автоматического управления широко применяют обратные связи.
Обратную связь называют внешней, если она соединяет выход системы с ее входом, и внутренней или местной, если она соединяет выход одного или группы элементов системы с их входом.
Если подача выходной величины элемента системы на его вход усиливает действие входной величины на выходную, то такая обратная связь называется положительной.
Обратная связь называется отрицательной, если подача выходной величины элемента системы на его вход ослабляет действие входной величины на выходную.
По характеру передачи воздействий обратные связи делятся на жесткие и гибкие. Жесткая связь действует как в установившемся, так и в переходном режиме, гибкая действует только в переходном режиме, а в установившемся режиме ее действие прекращается.
РАЗОМКНУТЫЕ И ЗАМКНУТЫЕ САУ.
Системы автоматического управления делятся на разомкнутые и замкнутые.
Разомкнутыми называются такие системы автоматического управления, в которых отсутствует внешняя обратная связь и, следовательно, отсутствует контроль результата управления.
В разомкнутой САУ с жесткой программой(рис.11.2,а) на управляющее устройство подается жесткое задание З. Управляющее устройство оказывает воздействие У на объект управления в соответствии с этим заданием. Под действием некоторого возмущенияxвх (например, изменение нагрузки) могут возникнуть отклонения выходной величиныxвых объекта от задания. Однако эти отклонения в разомкнутой САУ с жесткой программой не контролируются и не влияют на работу управляющего устройства.

Рис.11.2. Разомкнутые системы автоматического управления (САУ)
К таким системам относятся, например, системы автоматического пуска и остановки насосов, вентиляторов, компрессоров и т.п.
Замкнутыминазывают системы автоматического управления, в которых имеется обратная связь, обеспечивающая контроль выходной величины (рис.11.3,а).
При этом управляющее устройство формирует управляющее воздействие У в зависимости от отклонения входной величины xвых от задания З.
Введение в теорию автоматического управления. Основные понятия теории управления техническим системами
Публикую первую главу лекций по теории автоматического управления, после которых ваша жизнь уже никогда не будет прежней.
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика привествуется.

1. Основные понятия теории управления техническими системами
1.1. Цели, принципы управления, виды систем управления, основные определения, примеры
Развитие и совершенствование промышленного производства (энергетики, транспорта, машиностроения, космической техники и т.д.) требует непрерывного увеличения производительности машин и агрегатов, повышения качества продукции, снижения себестоимости и, особенно в атомной энергетике, резкого повышения безопасности (ядерной, радиационной и т.д.) эксплуатации АЭС и ядерных установок.
Реализация поставленных целей невозможна без внедрения современных систем управления, включая как автоматизированные (с участием человека-оператора), так и автоматические (без участия человека-оператора) системы управления (СУ).
Определение: Управление – это такая организация того или иного технологического процесса, которая обеспечивает достижение поставленной цели.
Теория управления является разделом современной науки и техники. Она базируется (основывается) как на фундаментальных (общенаучных) дисциплинах (например, математика, физика, химия и т.д.), так и на прикладных дисциплинах (электроника, микропроцессорная техника, программирование и т.д.).
Любой процесс управления (автоматического) состоит из следующих основных этапов (элементов):
- получение информации о задаче управления;
- получение информации о результате управления;
- анализ получаемой информации;
- выполнение решения (воздействие на объект управления).
Для реализации Процесса Управления система управления (СУ) должна иметь:
- источники информации о задаче управления;
- источники информации о результатах управления (различные датчики, измерительные устройства, детекторы и т.д.);
- устройства для анализа получаемой информации и выработки решения;
- исполнительные устройства, воздействующие на Объект Управления, содержащие: регулятор, двигатели, усилительно-преобразующие устройства и т.д.
Определение: Если система управления (СУ) содержит все перечисленные выше части, то она является замкнутой.
Определение: Управление техническим объектом с использованием информации о результатах управления называется принципом обратной связи.
Схематично такая система управления может быть представлена в виде:

Рис. 1.1.1 — Структура системы управления (СУ)
Если система управления (СУ) имеет структурную схему, вид которой соответствует рис. 1.1.1, и функционирует (работает) без участия человека (оператора), то она называется системой автоматического управления (САУ).
Если СУ функционирует с участием человека (оператора), то она называется автоматизированной СУ.
Если Управление обеспечивает заданный закон изменения объекта во времени независимо от результатов управления, то такое управление совершается по разомкнутому циклу, а само управление называется программным управлением.
К системам, работающим по разомкнутому циклу, относятся промышленные автоматы (конвейерные линии, роторные линии и т.д.), станки с числовым программным управлением (ЧПУ): см. пример на рис. 1.1.2.

Задающее устройство может быть, например, и “копиром”.
Поскольку в данном примере нет датчиков (измерителей), контролирующих изготавливаемую деталь, то если, например, резец был установлен неправильно или сломался, то поставленная цель (изготовление детали) не может быть достигнута (реализована). Обычно в системах подобного типа необходим выходной контроль, который будет только фиксировать отклонение размеров и формы детали от желаемой.
Автоматические системы управления подразделяются на 3 типа:
- системы автоматического управления (САУ);
- системы автоматического регулирования (САР);
- следящие системы (СС).
САР и СС являются подмножествами САУ ==>  .
.
Определение: Автоматическая система управления, обеспечивающая постоянство какой-либо физической величины (группы величин) в объекте управления называется системой автоматического регулирования (САР).
Системы автоматического регулирования (САР) — наиболее распространенный тип систем автоматического управления.
Первый в мире автоматический регулятор (18-е столетие) – регулятор Уатта. Данная схема (см. рис. 1.1.3) реализована Уаттом в Англии для поддержания постоянной скорости вращения колеса паровой машины и, соответственно, для поддержания постоянства скорости вращения (движения) шкива (ремня) трансмиссии.
В данной схеме чувствительными элементами (измерительными датчиками) являются “грузы” (сферы). «Грузы» (сферы) также “заставляют” перемещаться коромысло и затем задвижку. Поэтому данную систему можно отнести к системе прямого регулирования, а регулятор — к регулятору прямого действия, так как он одновременно выполняет функции и “измерителя” и “регулятора”.
В регуляторах прямого действия дополнительного источника энергии для перемещения регулирующего органа не требуется.

В системах непрямого регулирования необходимо присутствие (наличие) усилителя (например, мощности), дополнительного исполнительного механизма, содержащего, например, электродвигатель, серводвигатель, гидропривод и т.д.
Примером САУ (системы автоматического управления), в полном смысле этого определения, может служить система управления, обеспечивающая вывод ракеты на орбиту, где управляемой величиной может быть, например, угол между осью ракеты и нормалью к Земле ==> см. рис. 1.1.4.а и рис. 1.1.4.б

1.2. Структура систем управления: простые и многомерные системы
В теории управления техническими системами часто бывает удобно систему разделить на набор звеньев, соединенных в сетевые структуры. В простейшем случае система содержит одно звено, на вход которого подается входной воздействие (вход), на входе получается отклик системы (выход).
В теории Управления Техническими Системам используют 2 основных способа представления звеньев систем управления:
— в переменных “вход-выход”;
— в переменных состояния (более подробно см. разделы 6…7).
Представление в переменных “вход-выход” обычно используется для описания относительно простых систем, имеющих один “вход” (одно управляющее воздействие) и один “выход” (одна регулируемая величина, см. рисунок 1.2.1).

Обычно такое описание используется для технически несложных САУ (систем автоматического управления).
В последнее время широкое распространение имеет представление в переменных состояния, особенно для технически сложных систем, в том числе и для многомерных САУ. На рис. 1.2.2 приведено схематичное представление многомерной системы автоматического управления, где u1(t)…um(t) — управляющие воздействия (вектор управления), y1(t)…yp(t) — регулируемые параметры САУ (вектор выхода).

Рассмотрим более детально структуру САУ, представленную в переменных “вход-выход” и имеющую один вход (входное или задающее, или управляющее воздействие) и один выход (выходное воздействие или управляемая (или регулируемая) переменная).
Предположим, что структурная схема такой САУ состоит из некоторого числа элементов (звеньев). Группируя звенья по функциональному принципу (что звенья делают), структурную схему САУ можно привести к следующему типовому виду:

Рис. 1.2.3 — Структурная схема системы автоматического управления
Символом ε(t) или переменной ε(t) обозначается рассогласование (ошибка) на выходе сравнивающего устройства, которое может “работать” в режиме как простых сравнительных арифметических операций (чаще всего вычитание, реже сложение), так и более сложных сравнительных операций (процедур).
Задача системы управления состоит в том (если она устойчива), чтобы “работать” на уничтожение рассогласования (ошибки) ε(t), т.е. ==> ε(t) → 0.
Следует отметить, что на систему управления действуют как внешние воздействия (управляющее, возмущающее, помехи), так и внутренние помехи. Помеха отличается от воздействия стохастичностью (случайностью) своего существования, тогда как воздействие почти всегда детерминировано.
Для обозначения управляющего (задающего воздействие) будем использовать либо x(t), либо u(t).
1.3. Основные законы управления
Если вернуться к последнему рисунку (структурная схема САУ на рис. 1.2.3), то необходимо “расшифровать” роль, которую играет усилительно-преобразующее устройство (какие функции оно выполняет).
Если усилительно-преобразующее устройство (УПУ) выполняет только усиление (или ослабление) сигнала рассогласования ε(t), а именно:  , где
, где  – коэффициент пропорциональности (в частном случае = Const), то такой режим управления замкнутой САУ называется режимом пропорционального управления (П-управление).
– коэффициент пропорциональности (в частном случае = Const), то такой режим управления замкнутой САУ называется режимом пропорционального управления (П-управление).
Если УПУ выполняет формирование выходного сигнала ε1(t), пропорционального ошибке ε(t) и интегралу от ε(t), т.е.  , то такой режим управления называется пропорционально-интегрирующим (ПИ-управление). ==>
, то такой режим управления называется пропорционально-интегрирующим (ПИ-управление). ==>  , где b – коэффициент пропорциональности (в частном случае b = Const).
, где b – коэффициент пропорциональности (в частном случае b = Const).
Обычно ПИ-управление используется для повышения точности управления (регулирования).
Если УПУ формирует выходной сигнал ε1(t), пропорциональный ошибке ε(t) и ее производной, то такой режим называется пропорционально-дифференцирующим (ПД-управление): ==> 
Обычно использование ПД-управления повышает быстродействие САУ
Если УПУ формирует выходной сигнал ε1(t), пропорциональный ошибке ε(t), ее производной, и интегралу от ошибки ==>  , то такой режим называетсято такой режим управления называется пропорционально-интегрально-дифференцирующим режимом управления (ПИД-управление).
, то такой режим называетсято такой режим управления называется пропорционально-интегрально-дифференцирующим режимом управления (ПИД-управление).
ПИД-управление позволяет зачастую обеспечить “хорошую” точность управления при “хорошем” быстродействии
1.4. Классификация систем автоматического управления
1.4.1. Классификация по виду математического описания
По виду математического описания (уравнений динамики и статики) системы автоматического управления (САУ) подразделяются на линейные и нелинейные системы (САУ или САР).
Каждый “подкласс” (линейных и нелинейных) подразделяется на еще ряд “подклассов”. Например, линейные САУ (САР) имеют различия по виду математического описания.
Поскольку в этом семестре будут рассматриваться динамические свойства только линейных систем автоматического управления (регулирования), то ниже приведем классификацию по виду математического описания для линейных САУ (САР):
1) Линейные системы автоматического управления, описываемые в переменных «вход-выход» обыкновенными дифференциальными уравнениями (ОДУ) с постоянными коэффициентами:


где x(t) – входное воздействие; y(t) – выходное воздействие (регулируемая величина).
Если использовать операторную («компактную») форму записи линейного ОДУ, то уравнение (1.4.1) можно представить в следующем виде:

где, p = d/dt — оператор дифференцирования; L(p), N(p) — соответствующие линейные дифференциальные операторы, которые равны:


2) Линейные системы автоматического управления, описываемые линейными обыкновенными дифференциальными уравнениями (ОДУ) с переменными (во времени) коэффициентами:


В общем случае такие системы можно отнести и к классу нелинейных САУ (САР).
3) Линейные системы автоматического управления, описываемые линейными разностными уравнениями:


где f(…) – линейная функция аргументов; k = 1, 2, 3… — целые числа; Δt – интервал квантования (интервал дискретизации).
Уравнение (1.4.4) можно представить в «компактной» форме записи:

Обычно такое описание линейных САУ (САР) используется в цифровых системах управления (с использованием ЭВМ).
4) Линейные системы автоматического управления с запаздыванием:

где L(p), N(p) — линейные дифференциальные операторы; τ — время запаздывания или постоянная запаздывания.
Если операторы L(p) и N(p) вырождаются (L(p) = 1; N(p) = 1), то уравнение (1.4.6) соответствует математическому описанию динамики звена идеального запаздывания:

а графическая иллюстрация его свойств привдена на рис. 1.4.1

5) Линейные системы автоматического управления, описываемые линейными дифференциальными уравнения в частных производных. Нередко такие САУ называют распределенными системами управления. ==> «Абстрактный» пример такого описания:

Система уравнений (1.4.7) описывает динамику линейно распределенной САУ, т.е. регулируемая величина зависит не только от времени, но и от одной пространственной координаты.
Если система управления представляет собой «пространственный» объект, то ==>

где  зависит от времени и пространственных координат, определяемых радиусом-вектором
зависит от времени и пространственных координат, определяемых радиусом-вектором 
6) САУ, описываемые системами ОДУ, или системами разностных уравнений, или системами уравнений в частных производных ==> и так далее…
Аналогичную классификацию можно предложить и для нелинейных САУ (САР)…
Для линейных систем выполеняются следующие требования:
- линейность статической характеристики САУ;
- линейность уравнения динамики, т.е. переменные в уравнение динамики входят только в линейной комбинации.
Статической характеристикой называется зависимость выхода от величины входного воздействия в установившемся режиме (когда все переходные процессы затухли).
Для систем, описываемых линейными обыкновенными дифференциальными уравнениями с постоянными коэффициентами статическая характеристика получается из уравнения динамики (1.4.1) приравниванием нулю всех нестационарных членов ==>

На рис.1.4.2 представлены примеры линейной и нелинейных статических характеристик систем автоматического управления (регулирования).

Нелинейность членов, содержащих производные по времени в уравнениях динамики, может возникнуть при использовании нелинейных математических операций (*, /,  ,
,  , sin, ln и т.д.). Например, рассматривая уравнение динамики некоторой «абстрактной» САУ
, sin, ln и т.д.). Например, рассматривая уравнение динамики некоторой «абстрактной» САУ

отметим, что в этом уравнении при линейной статической характеристики  второе и третье слагаемые (динамические члены) в левой части уравнения — нелинейные, поэтому САУ, описываемая подобным уравнением, является нелинейной в динамическом плане.
второе и третье слагаемые (динамические члены) в левой части уравнения — нелинейные, поэтому САУ, описываемая подобным уравнением, является нелинейной в динамическом плане.
1.4.2. Классификация по характеру передаваемых сигналов
По характеру передаваемых сигналов системы автоматического управления (или регулирования) подразделяются:
- непрерывные системы (системы непрерывного действия);
- релейные системы (системы релейного действия);
- системы дискретного действия (импульсные и цифровые).
Системой непрерывного действия называется такая САУ, в каждом из звеньев которой непрерывному изменению входного сигнала во времени соответствует непрерывное изменение выходного сигнала, при этом закон изменения выходного сигнала может быть произвольным. Чтобы САУ была непрерывной, необходимо, чтобы статические характеристики всех звеньев были непрерывными.

Системой релейного действия называется САУ, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина в некоторые моменты процесса управления меняется “скачком” в зависимости от величины входного сигнала. Статическая характеристика такого звена имеет точки разрыва или излома с разрывом.

Системой дискретного действия называется система, в которой хотя бы в одном звене при непрерывном изменении входной величины выходная величина имеет вид отдельных импульсов, появляющиеся через некоторый промежуток времени.
Звено, преобразующее непрерывный сигнал в дискретный сигнал, называется импульсным. Подобный вид передаваемых сигналов имеет место в САУ с ЭВМ или контроллером.
Наиболее часто реализуются следующие методы (алгоритмы) преобразования непрерывного входного сигнала в импульсный выходной сигнал:
- амплитудно-импульсная модуляция (АИМ);
- широтно-импульсная модуляция (ШИМ).
На рис. 1.4.5 представлена графическая иллюстрация алгоритма амплитудно-импульсной модуляции (АИМ). В верхней части рис. представлена временная зависимость x(t) — сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена) y(t) – последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования Δt (см. нижнюю часть рис.). Длительность импульсов – одинакова и равна Δ. Амплитуда импульса на выходе блока пропорциональна соответствующей величине непрерывного сигнала x(t) на входе данного блока.
![]()
Данный метод импульсной модуляции был весьма распространен в электронно-измерительной аппаратуре систем управления и защиты (СУЗ) ядерных энергетических установок (ЯЭУ) в 70-х…80-х годах прошлого столетия.
На рис. 1.4.6 представлена графическая иллюстрация алгоритма широтно-импульсной модуляции (ШИМ). В верхней части рис. 1.14 представлена временная зависимость x(t) – сигнала на входе в импульсное звено. Выходной сигнал импульсного блока (звена) y(t) – последовательность прямоугольных импульсов, появляющихся с постоянным периодом квантования Δt (см. нижнюю часть рис. 1.14). Амплитуда всех импульсов – одинакова. Длительность импульса Δt на выходе блока пропорциональна соответствующей величине непрерывного сигнала x(t) на входе импульсного блока.

Данный метод импульсной модуляции в настоящее время является наиболее распространенным в электронно-измерительной аппаратуре систем управления и защиты (СУЗ) ядерных энергетических установок (ЯЭУ) и САУ других технических систем.
Завершая данный подраздел, необходимо заметить, что если характерные постоянные времени в других звеньях САУ (САР) существенно больше Δt (на порядки), то импульсная система может считаться непрерывной системой автоматического управления (при использовании как АИМ, так и ШИМ).
1.4.3. Классификация по характеру управления
По характеру процессов управления системы автоматического управления подразделяются на следующие типы:
- детерминированные САУ, в которых входному сигналу однозначно может быть поставлен в соответствие выходной сигнал (и наоборот);
- стохастические САУ (статистические, вероятностные), в которых на данный входной сигнал САУ “отвечает” случайным (стохастическим) выходным сигналом.
Выходной стохастический сигнал характеризуется:
- законом распределения;
- математическим ожиданием (средним значением);
- дисперсией (среднеквадратичным отклонением).
Стохастичность характера процесса управления обычно наблюдается в существенно нелинейных САР как с точки зрения статической характеристики, так и с точки зрения (даже в большей степени) нелинейности динамических членов в уравнениях динамики.

Кроме приведенных основных видов классификации систем управления, существуют и другие классификации. Например, классификация может проводиться по методу управления и основываться на взаимодействии с внешней средой и возможности адаптации САУ к изменению параметров окружающей среды. Системы делятся на два больших класса:
1) Обыкновенные (несамонастраивающиеся) СУ без адаптации; эти системы относятся к разряду простых, не изменяющих свою структуру в процессе управления. Они наиболее разработаны и широко применяются. Обыкновенные СУ подразделяются на три подкласса: разомкнутые, замкнутые и комбинированные системы управления.
2) Самонастраивающиеся (адаптивные) СУ. В этих системах при изменении внешних условий или характеристик объекта регулирования происходит автоматическое (заранее не заданное) изменение параметров управляющего устройства за счет изменения коэффициентов СУ, структуры СУ или даже введения новых элементов.
Другой пример классификации: по иерархическому признаку (одноуровневые, двухуровневые, многоуровневые).
РАЗОМКНУТЫЕ И ЗАМКНУТЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Состояние объекта управления характеризуется совокупностью физических величин, которые называют также показателями, параметрами, координатами процесса. Например: температура, давление, скорость, ток, напряжение.
Для нормального хода технологического процесса некоторые из его координат – управляемые координаты – необходимо поддерживать постоянными (напряжение генератора, скорость электродвигателя, давление компрессора и др.), либо изменять во времени по заданному закону (скорость подъёмной установки при её пуске и остановке).
Необходимость в управлении значениями координат возникает в том случае, когда нормальный ход процесса нарушается из-за различного рода возмущений, т.е. колебаний нагрузки, воздействий внешней среды или внутренних помех.
Сами машины или устройства во многих случаях не обладают способностью поддерживать постоянство координат или изменять их по заданному закону.
Управление, которое автоматически поддерживает координаты технологического процесса неизменными или изменяет их по заданному закону, называется регулированием.
Система автоматического управления, которая в течение длительного времени автоматически поддерживает координаты технологического процесса неизменными или изменяет их по заданному закону называется системой автоматического регулирования(САР).
Система автоматического регулирования является замкнутой системой, или системой с обратной связью.
РАЗОМКНУТЫЕ И ЗАМКНУТЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Автоматические системы управления отличаются одна от другой объектами и целями управления, физической природой и конструкциями элементов управляющих устройств. Тем не менее вне зависимости от их различий все системы управления можно разделить на два больших класса – разомкнутые и замкнутые.
На рис. 2.1, а показана функциональная схема разомкнутой САУ.
Рассмотрим назначение и свойства отдельных элементов функциональной схемы:
1. ОУ – объект управления. Это объект, которым управляют: электродвигатель, буровой станок и т. д.
Параметр производственного процесса  , которым мы хотим управлять, носит название управляемой или регулируемой величины. Регулируемую величину всегда принимают за выходную величину объекта управления. Вследствие большого разнообразия управляемых объектов физическая природа регулируемого параметра производственного процесса различна. Он может представлять собой угловую скорость электродвигателя, температуру, давление и расход жидкости или газа, напряжение генератора и т. д.
, которым мы хотим управлять, носит название управляемой или регулируемой величины. Регулируемую величину всегда принимают за выходную величину объекта управления. Вследствие большого разнообразия управляемых объектов физическая природа регулируемого параметра производственного процесса различна. Он может представлять собой угловую скорость электродвигателя, температуру, давление и расход жидкости или газа, напряжение генератора и т. д.
На объект управления поступают два входных воздействия: возмущающее f(t ) и управляющее u(t ).
Возмущающее воздействие – это воздействие, которое не зависят от управляющего устройства.
Управляющее воздействие – это воздействие, которое вырабатывается управляющим устройством УУ и поступает непосредственно на вход объекта управления.

Рис. 1.1.4 (а)
Рис. 2.1. Функциональные схемы разомкнутой (а) и замкнутой (б) САУ
2. ИСУ – исполнительное устройство. Оно непосредственно воздействует на объект управления. Выходной величиной исполнительного устройства является управляющее воздействие u(t), поступающее на вход объекта управления. Мощность исполнительного устройства обычно велика, так как оно воздействует непосредственно на объект управления.
3. УПУ – усилительно-преобразовательное устройство. Предназначено для усиления мощности и преобразования сигналов в управляющем устройстве.
4. ЗУ – задающее устройство (задатчик регулируемой величины). Выходной величиной задающего устройства является задающее воздействие (сигнал задания) g(t).
Задающее воздействие g(t) – это воздействие, которое задаёт требуемое значение регулируемой величины .
Энергия, необходимая для установки задающего воздействия, как правило, мала по сравнению с энергией, необходимой для работы исполнительного устройства и объекта управления.
Задающее, усилительно-преобразовательное и исполнительное устройства являются основными элементами управляющего устройства УУ.
Управляющее воздействие u(t) устанавливает заданное значение регулируемой величины  . Возмущающее воздействие f(t) вызывает отклонение регулируемой величины
. Возмущающее воздействие f(t) вызывает отклонение регулируемой величины  от заданного значения. Главный недостаток разомкнутых систем – отсутствие информации об объекте управления. Это может привести к значительному отклонению регулируемой величины от заданного значения при действии возмущающего воздействия и возникновению аварийной ситуации.
от заданного значения. Главный недостаток разомкнутых систем – отсутствие информации об объекте управления. Это может привести к значительному отклонению регулируемой величины от заданного значения при действии возмущающего воздействия и возникновению аварийной ситуации.
Несмотря на указанный недостаток область применения разомкнутых систем управления достаточно велика. Примерами разомкнутых систем являются системы автоматического пуска, остановки и реверсирования машин и механизмов, где не требуется точного регулирования скорости.
Для того чтобы автоматически уменьшить отклонение регулируемой величины от заданного значения при действии на объект управления возмущающего воздействия, необходимо применение замкнутой САУ. Замкнутая САУ содержит дополнительную связь, по которой результат измерения регулируемой величины передаётся на вход системы управления. Эта связь называется обратной связью по регулируемой величине, так как направление передачи воздействия в дополнительной связи обратно направлению передачи основного воздействия на объект.
Система управления, имеющая обратную связь по регулируемой величине, называется системой с обратной связью, илизамкнутой системой.
На рис. 2.1, б приведена функциональная схема замкнутой САУ. По сравнению с разомкнутой системой здесь управляющее устройство УУ содержит два дополнительных элемента: измерительное устройство ИЗУ и элемент сравнения ЭС.
Измерительное устройство (датчик) измеряет действительное значение управляемой величины и преобразует его в выходной сигнал, удобный для ввода в систему управления.
Выходной сигнал измерителя  называется сигналом обратной связи по регулируемой величине, а коэффициент пропорциональности kо.с –коэффициентом обратной связи по регулируемой величине. Сигнал обратной связи y(t) подается на вход элемента сравнения ЭС, где сравнивается с сигналом задания g(t). Физическая природа сигналов обратной связи и задания должна быть одинакова.
называется сигналом обратной связи по регулируемой величине, а коэффициент пропорциональности kо.с –коэффициентом обратной связи по регулируемой величине. Сигнал обратной связи y(t) подается на вход элемента сравнения ЭС, где сравнивается с сигналом задания g(t). Физическая природа сигналов обратной связи и задания должна быть одинакова.
Элемент сравнения служит для определения величины отклонения регулируемой величины от заданного значения. Выходной величиной элемента сравнения является разность e(t ) двух входных сигналов g(t ) и y(t ):
 .
.
Величина e(t) пропорциональна отклонению регулируемой величины от заданного значения и называется ошибкой регулирования. Ошибка e(t) является источником воздействия на систему. В этом случае САУ работает таким образом, чтобы уничтожить или свести к минимальному значению отклонение регулируемой величины от заданного значения при действии на объект управления возмущения f(t).
Обратим внимание на то, что в случае замкнутой САУ сигнал обратной связи должен подаваться на вход ЭС со знаком, противоположным знаку сигнала задания g(t). В этом случае обратная связь по регулируемой величине называется отрицательной.
Если сигнал обратной связи подается на вход ЭС с тем же знаком, что и сигнал задания, т.е. складывается с ним, то обратная связь называется положительной.
При подаче на вход ЭС сигнала отрицательной обратной связи (ООС) на схеме рядом с этим входом ставится знак «–» (рис 2.1, б). В случае положительной обратной связи (ПОС) знак «+» может опускаться.
Отрицательнаяобратная связь по регулируемой величине xр уменьшает ошибку регулирования e при действии на объект управления возмущающего воздействия f.
Положительная обратная связь по регулируемой величине xр увеличивает ошибку регулирования e при действии на объект управления возмущающего воздействия f.
Только применяя отрицательные обратные связи по регулируемым величинам, возможно решить задачу автоматического регулирования – автоматически поддерживать параметры технологического процесса неизменными или изменять их по заданному закону с требуемой точностью независимо от действия возмущающих воздействий.
В зависимости от характера изменения задающего воздействия во времени все системы автоматического регулирования делятся на три класса – стабилизации, программные и следящие.
Система стабилизации – это такая система, в которой значение задающего воздействия постоянно, не меняется во времени:
Системы стабилизации применяют для поддержания постоянства физических величин, характеризующих состояние объекта управления. Примером системы стабилизации является система регулирования давления компрессорной установки.
Программная автоматическая система – это такая система, в которой задающее воздействие является заранее заданной функцией времени g(t).
Программной системой является автоматическая система управления подъемной установкой, которая должна формировать требуемую диаграмму скорости подъёмного сосуда.
Следящая автоматическая система – это такая система, в которой закон изменения задающего воздействия заранее неизвестен. Следящие системы используют обычно для перемещения объектов в пространстве. Управляемой величиной в этом случае является либо расстояние перемещаемого объекта от какой-либо начальной точки, либо угол поворота вращаемого объекта относительно начального положения.
Цель управления в стабилизирующих, программных и следящих системах – это обеспечение равенства или близости регулируемой величины к её заданному значению.
источники:
http://habr.com/ru/post/503820/
http://megaobuchalka.ru/3/1544.html
Глава 8. Типовые законы регулирования. Одноконтурные САР
8.1. Основные типы автоматических регуляторов
Регулятор на основе усилительного звена называется П-регулятором (пропорциональный). Его положительной характеристикой является высокое быстродействие: при отклонении регулируемой величины от заданного значения регулятор выдает регулирующее воздействие, пропорциональное величине отклонения x, что обеспечивает быструю компенсацию возмущения. Существенным недостатком П-регулятора является наличие статической ошибки в переходном процессе АСР с П-регулятором (рис. 37). Статическая ошибка возникает потому, что у П-регулятора между регулируемой величиной x и регулирующим воздействием xр существует зависимость, однозначно определяемая коэффициентом K. Поэтому генерировать регулирующее воздействие xр для компенсации возмущения xв П-регулятор может только путем изменения регулируемой величины x, что и создает статическую ошибку.
Регулятор на основе интегрирующего звена (48) называется И‑регулятором:
Если xвых усилительного звена (П-регулятор) однозначно определяется величиной правой части уравнения, что является причиной возникновения статической погрешности в АСР с П-регулятором, то правая часть уравнения (48) интегрирующего звена (И-регулятор) определяет не величину, а скорость изменения xвых. Величина xвых будет изменяться до тех пор, пока правая часть уравнения (48) не станет равна нулю, т. е. пока регулируемая величина x при наличии возмущения xв не вернется к заданному значению. Следовательно, в АСР с И-регулятором не возникает статическая погрешность.
Однако у И-регулятора имеется свой недостаток сравнительно с П-регулятором: в случае возникновения возмущения регулирующее воздействие П-регулятора меняется быстрее, чем у И-регулятора с его конечной скоростью, что замедляет процесс компенсации возмущения и ухудшает критерии качества регулирования (рис. 40).
Рис. 40. Переходные процессы в АСР с П- и И-регуляторами
Таким образом, П-регулятор обеспечивает высокое быстродействие (что уменьшает динамическую ошибку), но не может обеспечить при наличии возмущения заданное значение регулируемой величины (статическая ошибка). И-регулятор, наоборот, не создает статическую ошибку, но вследствие относительно медленного изменения xр имеет большую динамическую ошибку.
Сравнивая характеристики П- и И-регуляторов можно сделать вывод: если включить усилительное и интегрирующие звенья параллельно, то автоматический регулятор будет лишен указанных недостатков. Такой регулятор называется ПИ-регулятором (рис. 41).
Рис. 41. Принципиальная схема АСР с ПИ-регулятором
Действительно, быстродействие ПИ-регулятора обеспечивает усилительное звено, а статическую ошибку снимает интегрирующее звено. Для управления производственными процессами чаще всего используются ПИ-регуляторы.
Кривая разгона идеального ПИ-регулятора показана на рис. 42 .
Уравнение ПИ-регулятора при нулевых начальных условиях имеет вид:

Отношение коэффициентов Kp1/Kp определяет степень влияния интегрирующей части, и его обратная величина называется временем изодрома Tи.

Время изодрома – это время, в течение которого интегрирующее звено изменяет регулирующее воздействие xр ПИ-регулятора на величину Dxр, равную предварительному изменению Dxр усилительного звена (рис. 42). Поэтому иногда время изодрома называют временем удвоения.
Рис. 42. График кривой разгона идеального ПИ-регулятора:
а – скачкообразное изменение входного воздействия x;
б – реакция (кривая разгона) ПИ-регулятора xр
Уравнение ПИ-регулятора можно записать как
откуда передаточная функция
Амплитудно-фазовая характеристика:
В том случае, если рассмотренные регуляторы не обеспечивают требуемое качество регулирования, необходимо увеличить интенсивность процесса компенсации возмущения. Этого можно достигнуть увеличением регулирующего воздействия, которое в свою очередь определяется коэффициентом усиления автоматического регулятора Kp
. Однако ниже будет показано, что увеличение коэффициента усиления регулятора в АСР приводит к тому, что в системе начинают генерироваться незатухающие колебания.
В связи с этим представляет интерес рассмотреть алгоритм, который реализует дифференцирующее звено.
Входной величиной любого регулятора является кривая разгона регулируемой величины (рис. 27), которая определяется величиной возмущения и передаточной функцией объекта регулирования (9). В свою очередь, регулирующее воздействие xp (рис. 27) определяется кривой разгона x и передаточной функцией регулятора.
На рис. 43 показана реакция дифференцирующего звена (Д‑регулятора) на входное воздействие в виде кривой разгона в соответствии с уравнением (51).
Рис. 43. Реакция дифференцирующего звена на кривую разгона
а –изменение входного воздействия x в виде кривой разгона;
б – реакция xр дифференцирующего звена
Из рис. 43,а следует, что дифференцирующее звено обеспечивает большее регулирующее воздействие в начале переходного процесса. Это означает, что дифференцирующий регулятор активно компенсирует возмущение и исключает возникновение незатухающих колебаний.
Если включить дифференцирующее звено параллельно ПИ‑регулятору (рис. 44), то получим ПИД-регулятор, обеспечивающий интенсивную компенсацию возмущений. При этом недостаток дифференцирующего звена (при Хвх = const, Хвых = 0 ) компенсируется усилительным и интегрирующим звеньями.
Рис. 44. Принципиальная схема АСР с ПИД-регулятором
На рис. 45 показана кривая разгона ПИД-регулятора.
Рис. 45. Кривая разгона ПИД-регулятора
На рис. 46 показаны переходные процессы на с различными регуляторами. ПИД-регулятор уменьшает динамическую ошибку сравнительно с ПИ-регулятором на 25–30%. Также можно объединить дифференцирующее звено с усилительным звеном и улучшить показатели П-регулятора, получив ПД-регулятор.
Все пять типов рассмотренных автоматических регуляторов имеют общую особенность своего функционирования – обеспечивают стабилизацию регулируемой величины после окончания переходного процесса.
8.2. Критерии качества регулирования
Качество процесса регулирования в АСР характеризуют следующие показатели (критерии) (рис. 16):
Рис. 16. Показатели качества регулирования:
1 – переходной процесс без статической ошибки;
2 – переходной процесс со статической ошибкой
1. Максимальное отклонение в процессе регулирования от заданного значения (динамическая ошибка) ΔХдин.
2. Статическая ошибка ΔХст — возможные отклонения от заданного значения по окончании переходного процесса при использовании некоторых типов регуляторов (подробнее такие АСР рассмотрены ниже).
3. Длительность переходного процесса Тр – период времени с момента начала отклонения регулируемого параметра от задания до возвращения его к заданному значению с определенной степенью точности регулирования ±Δ.
Например, если ±Δ=±25%, это означает, что для заданного значения температуры в 100 °С процесс регулирования будет завершен при достижении диапазона (100 ± 2,5) °С.
4. Степень затухания показывает характер затухания переходного процесса регулирования:

Для того, чтобы переходный процесс затухал за 2 ¸ 3 периода колебаний, степень затухания должна быть равна
5. Степень колебательности процесса m определяет характер колебательности процесса и равна отношению действительной части корня характеристического уравнения к коэффициенту при его мнимой части. Степень колебательности связана со степенью затухания следующим соотношением:
6. Интегральный квадратичный критерий – критерий, определяющий площадь под кривой переходного процесса, возведенной в квадрат (рис. 17):
Уменьшение интегрального критерия соответствует ускорению процесса регулирования.
Рис. 17. Интегральный квадратичный критерий качества регулирования
Однако все приведенные шесть критериев качества не определяют величину потерь производства при отклонениях регулируемой величины от оптимального значения в переходных процессах регулирования. Для определения таких потерь можно использовать экономический критерий.
7. Экономический критерий рассмотрим на примере, регулирования температуры химического реактора θ, когда степень превращения Q в реакторе определяется температурой (рис. 18а).
Разделим переходной процесс на равные интервалы времени Δt и запишем значения θ
в этих точках по графику (18, б). На графике (18, а) для этих температур определим уменьшение степени превращения вследствие отклонения от оптимального режима, а затем сделаем расчет потерь исходных продуктов для каждого интервала Δθ, суммируем эти потери для всего переходного процесса и представим потери в денежном выражении.
Рис. 18. Экономический критерий качества регулирования:
а – зависимость степени превращения Q от температуры θ;
б – переходный процесс регулирования температуры
Совместно со специалистом по технологии или по его заданию необходимо определить, какой из указанных критериев для рассматриваемой АСР является превалирующим, и задать максимально допустимую величину этого критерия, т. е. определить, какое качество регулирования должна обеспечить проектируемая АСР.
8.3. Выбор закона регулирования
При выборе регулятора следует определиться с группой регулирующих устройств – непрерывного, релейного или импульсного действия. Такой выбор ориентировочно может быть сделан по величине отношения запаздывания к постоянной времени объекта τ/Tоб:
· при отношении τ/Tоб меньше 0.2 целесообразно использовать регулятор релейного действия;
· если отношение τ/Tоб от 0.2 до 1.0, то нужно использовать регулятор непрерывного действия;
· при отношении τ/Tоб больше единицы можно использовать регулятор импульсного действия, или специальные регуляторы, например, регулятор («предиктор») Смита.
Затем необходимо определиться с типом регулятора, т.е. выбрать определенный закон регулирования: П-, И-, ПИ-, ПД- или ПИД-закон
8.4. Методы расчета одноконтурных САР
Как указывалось выше, качество автоматического регулирования определяется свойствами системы в целом, т. е. суммарными свойствами объекта и регулятора. Поскольку объект обычно является неизменяемой частью системы, то обеспечить определенные свойства системы, а следовательно и заданное качество регулирования, можно соответствующим подбором свойств автоматического регулятора, что зависит от параметров его настройки. В свою очередь, параметры настройки являются коэффициентами передачи в уравнении автоматического регулятора.
Таким образом, параметры настройки автоматического регулятора определяются свойствами объекта регулирования, т. е. величинами τоб, Тоб, Коб.
8.4.1. Расчет по «приближенным» формулам
Приближенные формулы для расчета параметров настройки автоматических регуляторов (Kр – коэффициент усиления; Tи – время изодрома; Тд – время дифференцирования) сведены в следующую таблицу:
Таблица 8.1. Формулы для приближенного расчета
параметров настройки регуляторов
Формулы сгруппированы в столбцы в зависимости от характера переходного процесса, который желательно получить, используя рассчитанный таким образом регулятор: апериодический или с перерегулированием в 20 %. В формулы входят следующие свойства объекта регулирования: Коб – коэффициент усиления; Тоб – постоянная времени; τоб – время запаздывания (полного).
Рис. 53. Кривые разгона:
1 – фактическая кривая разгона промышленного объекта;
2 – аппроксимированная (приближенная) кривая разгона
Необходимо отметить, что для пневматических регуляторов требуется определять не Kp, а диапазон дросселирования:
Рассмотрим методику более точного определения параметров настройки на примере расчета наиболее «популярного» регулятора – ПИ-регулятора.
8.4.2. Метод незатухающих колебаний
(метод Циглера-Никольса)
При использовании метода незатухающих колебаний [6], который иногда также называется по именам авторов методом Циглера-Никольса, поиск оптимальных параметров настройки осуществляется по величине критического коэффициента усиления П-регулятора и величине периода автоколебательного процесса.
Рис. 54. К поиску параметров настройки методом Циглера-Никольса
Расчет параметров настройки регуляторов проводится в два этапа.
1. На исследуемом объекте устанавливается П-регулятор и, последовательно увеличивая коэффициент усиления (уменьшая диапазон дросселирования), АСР выводится в режим незатухающих колебаний (автоколебаний на границе устойчивости). При этом фиксируется величина коэффициента усиления П-регулятора Ккрр и период незатухающих автоколебаний Т (рис. 54).
2. На втором этапе по величинам Кркр и Т определяются параметры настройки П-, ПИ- и ПИД-регуляторов:

Метод незатухающих колебаний не требует сложных вычислений, но имеет свои характерные недостатки:
· получить Кркр и Т можно только на действующем объекте, оснащенном АСР с П-регулятором;
· не все объекты химической технологии допускают режим автоколебаний;
· практически трудно уловить момент начала автоколебаний.
Данные недостатки имеют место лишь при настройке регулятора методом Циглера-Никольса непосредственно на действующем объекте. Если заменить реальный объект его математической моделью, данный метод лишается указанных недостатков, кроме того, моделирование позволяет на порядок ускорить процесс поиска параметров настройки. Но для выполнения моделирования требуется достаточно точное математическое описание объекта регулирования, а получить его удается не всегда.
8.4.3. Метод расширенных частотных характеристик
Уравнение ПИ-регулятора (65) или (66):

Передаточная функция ПИ-регулятора:


Знак «минус» указывает, что действие регулятора направлено против возмущения.
Из передаточной функции получаем амплитудно-фазовую характеристику ПИ-регулятора путем замены p на iw:

Так как по формуле Эйлера

с затуханием за три периода
Заменив iw на комплексную переменную (-mw+iw), получаем расширенную амплитудно-фазовую характеристику (РАФХ)Ю

Расширенными такие характеристики называются потому, что они как бы «расширены» по отношению к обычной АФХ (рис. 56).
Предположим, что объект регулирования имеет передаточную функцию второго порядка следующего вида:

Для дальнейшего математического моделирования АСР передаточную функцию необходимо преобразовать:
Рис. 56. АФХ объекта регулирования с самовыравниванием:
1 – обычная; 2 – расширенная
Расширенная амплитудно-фазовая характеристика объекта регулирования при замене p на (-mw+iw) будет иметь вид:




Где Rоб(m,w) -расширенная амплитудно-частотная характеристика объекта; Fоб(m,w) -расширенная фазочастотная харктеристика объекта. Величина 40w в выражении для Fоб (m,w) опеделяет угол в радианах и для пересчета в градусы неоходимо 40w умножить на 57,3
Условием нахождения замкнутой АСР на границе устойчивости является уравнение:

Аналогично, исходным уравнением для получения заданной степени колебательности m, а следовательно, определенной степени затухания y, является соотношение:

Это соотношение двух комплексных чисел возможно в том случае, если произведение модулей РАФХ равно единице, а аргументы (фазы) равны между собой, т. е.


Решая эти уравнения относительно S0 и Kp, получаем:
Обычно принимают степень колебательности m = 0,221, что соответствует степени затухания ψ=0,75 и обеспечивает затухание процесса регулирования примерно за три периода. Тогда
Уравнения для определения параметров настройки ПИ-регулятора можно преобразовать:

Подставляя в приведенные уравнения численные значения частоты w от 0 до значения, когда S0 становится отрицательной величиной, строим на плоскости параметров настройки кривую равной степени колебательности

Пример кривых равной степени колебательности в плоскости параметров настройки ПИ-регулятора показан на рис. 57. Графики процессов регулирования с различными параметрами настройки ПИ-регулятора при m = 0,221 показаны на рис. 58. Все процессы регулирования, показанные на рис. 58, реализованы ПИ-регулятором с параметрами настройки, полученными по кривой равной степени колебательности в точках 1, 2, 3, 4 (рис. 57), и все имеют m = 0,221, т. е. затухают примерно за три периода, но обладают существенно различным характером.
В связи с этим возникает задача определения оптимальных параметров настройки на кривой равной степени колебательности.
Рис. 57. Кривые равной степени колебательности
В качестве критерия оптимальности выбираем продолжительность переходного процесса – время регулирования (т. е. быстродействие АСР) и отсутствие постоянной или врéменной статической ошибки. Это исключает из рассмотрения параметры настройки в точке 4 (параметры настройки П-регулятора) и в точке 3 (врéменная статическая ошибка) (рис. 58).
Рис. 58. Графики процессов регулирования для ПИ-регулятора
с различными параметрами настройки в точках 1, 2, 3 и 4
при степени колебательности m =0,221
Быстродействие автоматического регулятора прежде всего зависит от величины регулирующего воздействия, которое для ПИ-регулятора, как следует из уравнения (65), прямо пропорционально величине коэффициента усиления Kp и обратно пропорционально времени изодрома Tи. Расчеты показывают, что если двигаться по кривой равной степени колебательности вправо, то величина регулирующего воздействия при прочих равных условиях сначала возрастает и достигает максимального значения на кривой равной степени колебательности вблизи ее вершины, когда
а затем начинает уменьшаться в связи с резким увеличением Tи (рис. 57).
Рис. 59. Выбор оптимальных параметров настройки
Таким образом, оптимальные параметры настройки ПИ-регулятора находятся в точке 2 на кривой равной степени колебательности (рис. 59).
Источник
Плютто В. П., Дубровский И. И. Элементы теории управления химико-технологическими процессами и системами. Конспект лекций: Учеб. пособие – М.: РХТУ им. Д. И. Менделеева, 2003. – 127 с.
Точность системы автоматического управления Статическая ошибка системы
В системах
автоматического управления часто
приходится решать задачу стабилизации
управляемой величины. Точность поддержания
требуемого значения управляемой величины
в такой системе можно оценить как разницу
между заданным значением управляемой
величины и её установившимся значением
в системе после окончания переходного
процесса:
![]() .
.
Эта величина
получила название статической ошибки
системы. При вычислении статической
ошибки предполагается, что система
находится в статике и все сигналы в ней
имеют постоянные величины. Статическая
ошибка используется для оценки точности
установления в системе заданной
постоянной выходной величины после
окончания переходного процесса.
Используя
передаточную функцию замкнутой системы
по ошибке, для изображения ошибки в
системе можно записать
![]() ,
,
где![]() передаточная
передаточная
функция замкнутой системы по ошибке,![]() изображение
изображение
задающего воздействия.
Для статики,
когда все сигналы в системе неизменны,
выражение для ошибки можно перенести
в область оригиналов
![]() .
.
Поскольку
![]() ,
,
гдеW(p)
– передаточная функция разомкнутой
системы, то статическую ошибку системы
можно вычислить, зная передаточную
функцию разомкнутой системы:
![]() ,
,
где![]() .
.
Вместо
абсолютного значения статической ошибки
часто используют относительную
статическую ошибку
![]() .
.
Если система
статическая (т.е. не содержит интегрирующих
звеньев), то передаточную функцию
разомкнутой системы можно представить
в следующем нормированном виде:
![]() ,
,
гдеK– коэффициент
усиления системы,A*(p),B*(p)
– нормированные полиномыA(p)
иB(p).
При этом![]() и
и![]() .
.
Тогда![]() и статическая ошибка в статической
и статическая ошибка в статической
системе
![]() .
.
Статическая
ошибка в статической системе уменьшается
с увеличением коэффициента усиления
системы. Статическая система всегда
будет иметь некоторую ошибку. Физический
смысл такой ошибки заключается в
необходимости некоторого рассогласования
между задающей и выходной величинами
системы для получения сигнала управления.
Если в системе
управления имеются интегрирующие
звенья, то система будет астатической.
Для астатической системы первого порядка
(содержащей одно интегрирующее звено)
передаточная функция разомкнутой
системы
![]()
и передаточная функция замкнутой системы
по ошибке
 .
.
В этом случае всегда
![]() и, следовательно, статическая ошибка
и, следовательно, статическая ошибка
астатической системы будет равна нулю.
Таким образом, статическая ошибка в
астатической системе в принципе
отсутствует, что обуславливает более
высокую точность астатических систем,
по сравнению со статическими системами.
В астатической системе автоматического
управления установившееся значение
управляемой величины равно заданному
значению этой величины.
Вынужденная ошибка системы
Процесс в
системе складывается из свободного
процесса и вынужденного процесса:
![]() .
.
Для
устойчивой системы свободный процесс
по истечении времениtпзатухает и в системе устанавливается
вынужденный процесс
![]()
Точность
поддержания заданного значения
управляемой величины в вынужденном
режиме характеризуется вынужденной
ошибкой системы
![]() .
.
Вынужденная
ошибка хорошо характеризует работу
системы автоматического управления в
том случае, когда изменения управляющего
воздействия происходят существенно
медленнее собственных переходных
процессов в системе и последними можно
пренебречь.
Рассмотрим
вычисление вынужденной ошибки системы
автоматического управления. Изображение
для вынужденной ошибки
![]() .
.
В общем случае
![]() является дробно-рациональной функцией
является дробно-рациональной функцией
отpи ее можно разложить
в ряд Тейлора по степенямрвблизи![]() , тогда
, тогда
![]() и
и
выражение для вынужденной ошибки системы
примет вид
![]() где
где![]() постоянные
постоянные
коэффициенты.
Для полученного
изображения вынужденной ошибки на
основе свойств преобразования Лапласа
легко находится выражение для оригинала
ошибки
![]()
где
![]() ,
,![]() ,
,![]() …коэффициенты
…коэффициенты
ошибок, полученные выше (C0– коэффициент статической ошибки,C1
– коэффициент скоростной ошибки и
т. д.).
Коэффициенты
ошибки могут быть также получены делением
числителя передаточной функции на ее
знаменатель. Полученное выражение для
вынужденной ошибки позволяет оценить
точность системы автоматического
управления в установившемся режиме.
Вынужденная ошибка, например, хорошо
характеризует точность работы следящих
систем автоматического управления.
Соседние файлы в папке ТАУ
- #
- #
- #
Лекция 17. Расчет установившейся ошибки в системах управления.
Структурные признаки астатизма
Установившейся (статической) ошибкой называют
постоянное значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании переходного процесса: ![]() , рисунок 116.
, рисунок 116.
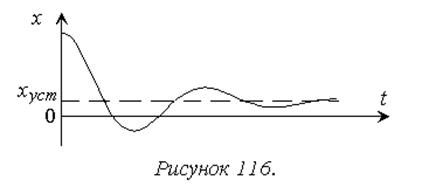
Очевидно, установившаяся ошибка зависит от законов
изменения и численных характеристик входных сигналов системы. Поэтому при ее
определении принято рассматривать так называемые типовые входные сигналы,
законы изменения которых составляют степенной ряд относительно времени.
Например, для задающего воздействия:
![]() ,
, ![]() ,
,  и так
и так
далее.
При наличии нескольких воздействий на линейную систему
для определения xуст используется
принцип суперпозиции – реакция линейной системы на совокупность входных
сигналов совпадает с алгебраической суммой ее реакций на каждый из сигналов в
отдельности:
 , где
, где
каждое слагаемое, или составляющая сигнала ошибки, ![]() определяется
определяется
для i-го входного сигнала при условии, что остальные
тождественно равны нулю. Такой подход полностью соответствует определению
передаточной функции и позволяет выполнять расчет установившейся ошибки на
основе структурной схемы системы.
Рассмотрим порядок расчета установившейся ошибки на
следующем достаточно общем примере (рисунок 117).
В соответствии с принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде суммы трех составляющих ![]() .
.
Изображение по Лапласу ошибки от задающего воздействия
получают через передаточную функцию замкнутой системы по ошибке ![]() при известном изображении задающего
при известном изображении задающего
воздействия G(s):
![]() , где
, где
F(s) – основная передаточная функция замкнутой системы.
Для структурной схемы на рисунке 117
 , где
, где ![]() — передаточная функция
— передаточная функция
разомкнутой системы, или прямой цепи системы, для рассматриваемого примера.
Непосредственно для расчета
установившегося значения ошибки от задающего воздействия используют теорему о
конечном значении для преобразования Лапласа:
![]()
В результате:
 .
.
Изображение по Лапласу ошибки от возмущающего
воздействия получают через передаточную функцию замкнутой системы по ошибке от
возмущения ![]() при известном изображении возмущающего
при известном изображении возмущающего
воздействия F(s):
![]() , где
, где
Ff(s) –передаточная функция замкнутой системы по
возмущающему воздействию,
 ;
;
Wf(s)
– передаточная функция разомкнутой системы по возмущению (передаточная функция
участка прямой цепи системы от точки приложения возмущающего воздействия до
выхода системы).
Для структурной схемы на рисунке 8 необходимо
учитывать два возмущающих воздействия, приложенные в различные точки системы.
Для f1:
![]() ,
,
 ,
,
 .
.
Для f2:
![]() ,
,
 ,
,
 .
.
Расчет упрощается для
системы с единичной отрицательной обратной связью (рисунок 118):
 ,
,
 , где k=k1k2k3 – коэффициент передачи
, где k=k1k2k3 – коэффициент передачи
разомкнутой системы.
Найдем установившуюся ошибку
для некоторых типовых вариантов задающего воздействия.
При ![]() получим:
получим:
![]()
 .
.
При ![]() получим:
получим:
 .
.
При получим:
 .
.
Если установившаяся ошибка
тождественно равна нулю при каком-либо типовом варианте входного сигнала,
независимо от его численных характеристик, систему называют астатической по
рассматриваемому входному сигналу.
Количество типовых вариантов
входного сигнала – членов степенного ряда, при которых установившаяся ошибка
тождественно равна нулю, определяет порядок астатизма.
Рассматриваемая система
обладает свойством астатизма второго порядка по задающему воздействию.
Рассмотрим установившуюся
ошибку от возмущения f1:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f1.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим
получим
тот же результат.
Отметим, что по возмущению f1 рассматриваемая система
не является астатической. Кроме того, она не в состоянии отработать два последних
варианта входного сигнала.
Рассмотрим установившуюся
ошибку от возмущения f2:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f2.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим:
получим:
 .
.
По возмущению f2 рассматриваемая система имеет
астатизм первого порядка. Она не в состоянии отработать возмущающее
воздействие, изменяющееся во времени с постоянным ускорением.
Подведем некоторые итоги:
1. Наличие и глубина
свойства астатизма зависят от точки приложения входного сигнала.
2. Постоянные времени
звеньев системы не влияют на ее точность.
3. Увеличение значения
коэффициента передачи разомкнутой системы приводит к снижению величины
установившейся ошибки.
Для систем с единичной
отрицательной обратной связью существуют достаточно простые структурные
признаки астатизма.
Рассмотрим структуру,
показанную на рисунке 119.
В общем случае передаточная
функция разомкнутой системы может быть представлена в следующей форме:
 , где l³0.
, где l³0.
Тогда получим:

и для общего вида задающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Результат нахождения этого
предела зависит от соотношения показателей степени:
— при l>v установившаяся
ошибка равна нулю независимо от остальных параметров, то есть имеет место
астатизм;
— при l=v получаем
константу;
— при l<v установившаяся
ошибка стремится к бесконечности, то есть система не в состоянии отработать
входной сигнал.
Учитывая, что минимальное
значение v нулевое,
получаем условие астатизма по задающему воздействию: l>0.
Таким образом, структурный
признак астатизма по задающему воздействию в системе с единичной отрицательной
обратной связью состоит в наличии нулевых корней в знаменателе передаточной
функции разомкнутой системы, или интегрирующих звеньев в прямой цепи системы.
Нетрудно также убедиться,
что положительное значение l совпадает
с порядком астатизма.
Для получения признака
астатизма по возмущающему воздействию представим передаточные функции на
рисунке 10 в форме:
 ,
,
 , где l1+l2=l,
, где l1+l2=l,
k1k2=k, m1+m2=m,
n1+n2=n,
причем ![]() и
и ![]() .
.
Тогда получим:

и для общего вида возмущающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Все вышеприведенные выводы
можно повторить для показателя степени l1.
Таким образом, структурный
признак астатизма по возмущающему воздействию в системе с единичной
отрицательной обратной связью состоит в наличии нулевых корней в знаменателе
передаточной функции участка системы до точки приложения воздействия, или
интегрирующих звеньев на том же участке.
Величина — статическая ошибка
Cтраница 1
Величина статической ошибки зависит как от настройки регулятора, так и от характеристики и режима работы объекта.
[1]
Стремление уменьшить величину статической ошибки иногда неизбежно приводит к увеличению перерегулирования и времени регулирования. Уменьшение перерегулирования иногда приводит к увеличению статической ошибки.
[2]
В статических системах величина статической ошибки зависит от величины ступенчатой нагрузки. Эта зависимость, называемая статической характеристикой, имеет большое значение для анализа работы САР.
[3]
В астатических системах величина статической ошибки определяется значением нечувствительности регулятора.
[4]
При большом числе компрессоров величина статической ошибки может выйти за допустимые пределы.
[5]
Статическая точность передачи характеризуется величиной статической ошибки, определяемой углом рассогласования между осями датчика и приемника при отсутствии вращения. Величина статической ошибки зависит от нагрузки или момента на валу приемника, а также от собственной погрешности сельсинов.
[6]
Статическая точность передачи характеризуется величиной статической ошибки, определяемой углом пяссогласования между осями датчика и приемника при отсутствии вращения. Величина статической ошибки зависит от нагрузки или момента на валу приемника, а также от собственной погрешности сельсинов.
[7]
По мере увеличения коэффициента усиления величина статической ошибки уменьшается. В то же время степень колебания повышается и соответственно увеличивается динамическая ошибка регулирования. Оптимальная величина должна выбираться как с учетом статической, так и динамической ошибки. Причем статическая ошибка регулирования может быть исключена за счет введения интегральной составляющей в закон регулирования.
[8]
Нужно иметь в виду, что величина статической ошибки зависит как от настройки регулятора, так и от характеристики и режима работы объекта.
[9]
Получается противоречие между требованиями обеспечения устойчивости и величиной статической ошибки.
[10]
Определим границу ОНР, исходя из предположения, что величина статической ошибки не должна превышать величины 0 5 % от входного сигнала при полном перемещении исполнительного механизма.
[11]
Таким образом, давление в приемном канале 2 с точностью до величины статической ошибки, определяемой коэффициентом усиления струйного усилителя, поддерживается постоянным. При постоянном сечении потока этим способом измеряют расход вещества, определяемого как произведение скорости на площадь поперечного сечения потока.
[13]
По оси ординат откладывается отношение максимальной динамической ошибки в переходном процессе к величине статической ошибки, которая имела бы место, если бы в системе использовался пропорциональный регулятор, и была бы равна KLI ( K) при единичном ступенчатом изменении нагрузки. Это значение принято считать наилучшим. Нижняя кривая соответствует декременту затухания, равному 0 46, который получается, если коэффициент усиления выбрать близким к максимальному.
[15]
Страницы:
1
2
3
4
В автоматической системе с симметричной нелинейностью могут иметь место несимметричные автоколебания с некоторой постоянной составляющей  при приложении постоянного внешнего воздействия. При этом величина амплитуды и частота автоколебаний, существовавших до приложения внешнего воздействия, во многом определяют величину постоянной составляющей. Но, наличие постоянного внешнего воздействия изменяет величину амплитуды и частоты автоколебаний.
при приложении постоянного внешнего воздействия. При этом величина амплитуды и частота автоколебаний, существовавших до приложения внешнего воздействия, во многом определяют величину постоянной составляющей. Но, наличие постоянного внешнего воздействия изменяет величину амплитуды и частоты автоколебаний.
Величина  в случае статической системы определяет собой статическую ошибку, в астатической системе — установившуюся ошибку при постоянной скорости, а в дважды астатической — установившуюся ошибку при постоянном ускорении. Основная задача, таким образом, сводится к определению зависимости между величинами постоянного внешнего воздействия (или постоянной скорости его изменения) и установившейся ошибки, или же к такому выбору параметров системы, например, коэффициента усиления
в случае статической системы определяет собой статическую ошибку, в астатической системе — установившуюся ошибку при постоянной скорости, а в дважды астатической — установившуюся ошибку при постоянном ускорении. Основная задача, таким образом, сводится к определению зависимости между величинами постоянного внешнего воздействия (или постоянной скорости его изменения) и установившейся ошибки, или же к такому выбору параметров системы, например, коэффициента усиления  при котором величина статической ошибки не превышает заданного значения.
при котором величина статической ошибки не превышает заданного значения.
Практический интерес представляет также определение зависимости амплитуды и частоты автоколебаний от величины постоянного внешнего воздействия.
Уравнение нелинейной автоматической системы

где  — приложенное в любой точке ее внешнее воздействие в данном случае может быть записано в виде
— приложенное в любой точке ее внешнее воздействие в данном случае может быть записано в виде

В статической системе будет  , где
, где  , а в астатической, когда
, а в астатической, когда  имеем
имеем  , где
, где  (постоянная скорость изменения внешнего воздействия). В дважды астатической системе
(постоянная скорость изменения внешнего воздействия). В дважды астатической системе  и при
и при  будет
будет 
Решение уравнения  вследствие несимметричности автоколебаний необходимо искать в виде [16], [13]
вследствие несимметричности автоколебаний необходимо искать в виде [16], [13]

где  — постоянная составляющая автоколебаний, х — периодическая (колебательная) составляющая.
— постоянная составляющая автоколебаний, х — периодическая (колебательная) составляющая.
Вследствие наличия смещения  при разложении нелинейной функции
при разложении нелинейной функции  в ряд Фурье добавится член, характеризующий
в ряд Фурье добавится член, характеризующий
постоянную составляющую; при этом выражение для гармонической линеаризации нелинейности приобретает вид

здесь  — соответственно постоянная составляющая и коэффициенты гармонической линеаризации, определяемые по формулам
— соответственно постоянная составляющая и коэффициенты гармонической линеаризации, определяемые по формулам

где 
В частном случае, когда нелинейность  является однозначной (не петлевой)
является однозначной (не петлевой)  то формула (Х.59) принимает вид
то формула (Х.59) принимает вид

Определив по формулам  коэффициенты гармонической линеаризации
коэффициенты гармонической линеаризации  и подставив в уравнение
и подставив в уравнение  вместо
вместо  выражение
выражение  получим гармонически линеаризованное уравнение системы
получим гармонически линеаризованное уравнение системы

Это уравнение можно представить в виде системы двух уравнений соответственно для постоянной и колебательной составляющих решения:

Уравнение  описывает смещение центра колебаний системы в зависимости от величины постоянного внешнего воздействия М. Уравнение (Х.64) описывает периодическое движение системы по координате х относительно центра колебаний, определяемого величиной смещения
описывает смещение центра колебаний системы в зависимости от величины постоянного внешнего воздействия М. Уравнение (Х.64) описывает периодическое движение системы по координате х относительно центра колебаний, определяемого величиной смещения  Однако оба уравнения линейно взаимосвязаны, так как коэффициенты
Однако оба уравнения линейно взаимосвязаны, так как коэффициенты  уравнения
уравнения  зависят от величины смещения
зависят от величины смещения  а величина
а величина  в уравнении
в уравнении  зависит от амплитуды автоколебаний А.
зависит от амплитуды автоколебаний А.
Из уравнения  можно определить величину статической ошибки в функции от амплитуды автоколебаний А, внешнего воздействия М и параметров системы, например, k:
можно определить величину статической ошибки в функции от амплитуды автоколебаний А, внешнего воздействия М и параметров системы, например, k:

Подставляя найденное выражение  в уравнение
в уравнение  полагая
полагая  и выделяя вещественную и мнимую части, получим два уравнения
и выделяя вещественную и мнимую части, получим два уравнения

Решить аналитически уравнения  относительно А и
относительно А и  обычно затруднительно. Целесообразно в данном случае применение какого-либо из графических приемов. Часто бывает удобно из уравнений
обычно затруднительно. Целесообразно в данном случае применение какого-либо из графических приемов. Часто бывает удобно из уравнений  найти выражение для
найти выражение для  . Приравнивая полученные значения
. Приравнивая полученные значения  , получим новое уравнение с тремя неизвестными
, получим новое уравнение с тремя неизвестными  :
:

Из уравнения  как правило, можно определить какую-либо из величин как функцию двух остальных. Например,
как правило, можно определить какую-либо из величин как функцию двух остальных. Например,

Полученное уравнение  дает возможность построить семейство кривых
дает возможность построить семейство кривых  при разных значениях М. Затем по одной из формул
при разных значениях М. Затем по одной из формул  легко определить
легко определить  при
при 
Если какая-либо из искомых величин входит только в одно из уравнений  то описанное решение значительно упрощается.
то описанное решение значительно упрощается.
Поскольку после построения графиков станет известной зависимость амплитуды автоколебаний  от значения параметра
от значения параметра  и величины внешнего воздействия М, то из формулы
и величины внешнего воздействия М, то из формулы  определяются искомые зависимости
определяются искомые зависимости  при
при  или
или  при
при 
Таким образом определяется величина статической ошибки  в зависимости от величины внешнего воздействия М и значения определяемого параметра системы
в зависимости от величины внешнего воздействия М и значения определяемого параметра системы  Если полученные значений статической ошибки и амплитуды автоколебаний на входе нелинейного звена
Если полученные значений статической ошибки и амплитуды автоколебаний на входе нелинейного звена  не являются непосредственно интересующими проектировщика величинами, то пересчет в любую точку системы производится через передаточные функции соответствующих звеньев системы.
не являются непосредственно интересующими проектировщика величинами, то пересчет в любую точку системы производится через передаточные функции соответствующих звеньев системы.
Решение уравнений  возможно и другим способом: подставив в уравнение
возможно и другим способом: подставив в уравнение  и выделив вещественную и мнимую части, получим два алгебраических уравнения с тремя неизвестными
и выделив вещественную и мнимую части, получим два алгебраических уравнения с тремя неизвестными 
Эти уравнения дают возможность определить амплитуду А и частоту  автоколебаний как функцию постоянной составляющей
автоколебаний как функцию постоянной составляющей  Подставив значения амплитуды и частоты автоколебаний в выражение для
Подставив значения амплитуды и частоты автоколебаний в выражение для  [первая формула (Х.60)], получим функцию смещения
[первая формула (Х.60)], получим функцию смещения

которая является характеристикой данного нелинейного звена по отношению к постоянной составляющей  при наличии автоколебаний. Важно отметить, что функция смещения
при наличии автоколебаний. Важно отметить, что функция смещения  не зависит ни от числа внешних воздействий на систему, ни от характера их изменения (он может быть не постоянной, а медленно меняющейся, что рассматривается ниже в § 5).
не зависит ни от числа внешних воздействий на систему, ни от характера их изменения (он может быть не постоянной, а медленно меняющейся, что рассматривается ниже в § 5).
После определения функции смещения из уравнения  с подстановкой
с подстановкой  сразу определяется искомая зависимость статической ошибки
сразу определяется искомая зависимость статической ошибки  от величины постоянного внешнего воздействия М.
от величины постоянного внешнего воздействия М.
Возможен случай, когда к нелинейной системе приложено несколько внешних воздействий:
Методика расчетов при этом сохраняется. В отличие от линейных систем в данном случае складывать статические ошибки от отдельных воздействий нельзя. Это обусловлено нелинейной зависимостью  от величины внешнего воздействия, как это следует из уравнения
от величины внешнего воздействия, как это следует из уравнения  которое в данном случае принимает вид
которое в данном случае принимает вид

Для облегчения практических расчетов в табл. 1 и 2 приложения IV приведены значения коэффициентов гармонической линеаризации для некоторых типоб нелинейных звеньев. Более полные сведения по гармонической линеаризации при наличии внешнего воздействия приведены в работе [13].
Несимметричные колебания в нелинейных автоматических системах могут возникать не только при наличии внешнего воздействия, но и при несимметричных характеристиках самого нелинейного элемента  без внешнего воздействия.
без внешнего воздействия.
В этом случае правая часть уравнения  равна нулю:
равна нулю:

При несимметричных характеристиках нелинейного звена  возникает постоянная составляющая
возникает постоянная составляющая

Поэтому решение уравнения  как и прежде, надо искать в виде суммы постоянной и периодической составляющих:
как и прежде, надо искать в виде суммы постоянной и периодической составляющих:

Уравнения  в данном случае имеют вид
в данном случае имеют вид

Решение уравнений  выполняется таким же образом, как это делалось для симметричной характеристики нелинейного звена, при наличии постоянного внешнего воздействия.
выполняется таким же образом, как это делалось для симметричной характеристики нелинейного звена, при наличии постоянного внешнего воздействия.
Для облегчения использования описанной выше методики в табл. 3 приложения II приведены готовые выражения  для некоторых типов несимметричных нелинейностей [13].
для некоторых типов несимметричных нелинейностей [13].
Пример 4. Для иллюстрации описанной выше методики определения установившихся ошибок в автоколебательных нелинейных системах рассмотрим систему, блок-схема которой приведена на рис. Х.20.

Рис. Х.20. Блок-схема релейной системы автоматического регулирования
Уравнения этой системы имеют вид:

Нелинейность представляет собой характеристику идеального симметричного реле

Уравнение системы будет

Предположим, что функция  является управляющим воздействием, изменяющимся с постоянной скоростью
является управляющим воздействием, изменяющимся с постоянной скоростью

которое должна воспроизвести система на выходе. Второе внешнее воздействие  является возмущающим и имеет постоянную величину (например, постоянная нагрузка на выходном валу системы), т. е.
является возмущающим и имеет постоянную величину (например, постоянная нагрузка на выходном валу системы), т. е.

Необходимо определить установившуюся ошибку на выходе системы. Правая часть характеристического уравнения будет при этом постоянной и установившееся решение для X с учетом автоколебаний следует искать в виде выражений 
Тогда уравнения для постоянных и периодических составляющих будут иметь вид:

В соответствии с изложенной выше методикой из уравнений  определим
определим

Откуда

или

Для определения амплитуды А периодической составляющей используется уравнение  для которого запишем характеристическое уравнение
для которого запишем характеристическое уравнение

Подставив  и выделив вещественную и мнимую части, получим
и выделив вещественную и мнимую части, получим 

Из уравнений  найдем
найдем

Исключая из уравнений  величину
величину  определим частоту автоколебаний
определим частоту автоколебаний

Подставив полученные значения  в уравнение
в уравнение  определим амплитуду автоколебаний
определим амплитуду автоколебаний

Здесь величина

является амплитудой симметричных автоколебаний при отсутствии внешних воздействий 
Подставив полученное значение амплитуды А в формулу  определим искомую величину смещения
определим искомую величину смещения

Из формулы (Х.82) видно, что автоколебания в системе существуют только до тех пор, пока внешние воздействия удовлетворяют условию

причем амплитуда автоколебаний уменьшается  с увеличением внешних воздействий.
с увеличением внешних воздействий.
Так, в результате расчета определена величина смещения на входе реле. Однако практически больший интерес представляет установившаяся ошибка на выходе системы. Поскольку на выходе системы должно воспроизводиться внешнее воздействие  то, согласно рис. Х.20, ошибка данной системы выражается величиной
то, согласно рис. Х.20, ошибка данной системы выражается величиной  Запишем переменную
Запишем переменную  через х, которая уже известна.
через х, которая уже известна.
Из заданных уравнений системы  имеем
имеем

Учитывая, что  уравнение
уравнение  запишем в виде
запишем в виде

В соответствии с характером правой части нужно искать установившееся решение этого линейного уравнения в виде

где  — постоянные величины;
— постоянные величины;
— периодическая составляющая.
Подставляя выражение  получим три уравнения
получим три уравнения

Из уравнения (X.87) определим

Затем из уравнения  найдем
найдем

Наконец, из уравнения  получим
получим

где  определяются соответственно из формул
определяются соответственно из формул 
Итак, в системе содержатся все три составляющие ошибки  зависящие от величины внешних воздействий и от параметров системы. Наиболее нежелательной составляющей ошибки является составляющая
зависящие от величины внешних воздействий и от параметров системы. Наиболее нежелательной составляющей ошибки является составляющая  возрастающая с течением времени. Для исключения этой ошибки необходимо в системе жесткую обратную связь заменить гибкой
возрастающая с течением времени. Для исключения этой ошибки необходимо в системе жесткую обратную связь заменить гибкой
