Выпускная квалификационная работа. Часть 5.
5.1 Основные определения
5.2 Погрешности АЦП
5.3 Экспериментальные исследования
5.4 Выводы
5.1 Основные определения
Измерение – это операция, в результате которой мы узнаем, во сколько раз измеряемая величина больше или меньше соответствующей величины, принятой за эталон.
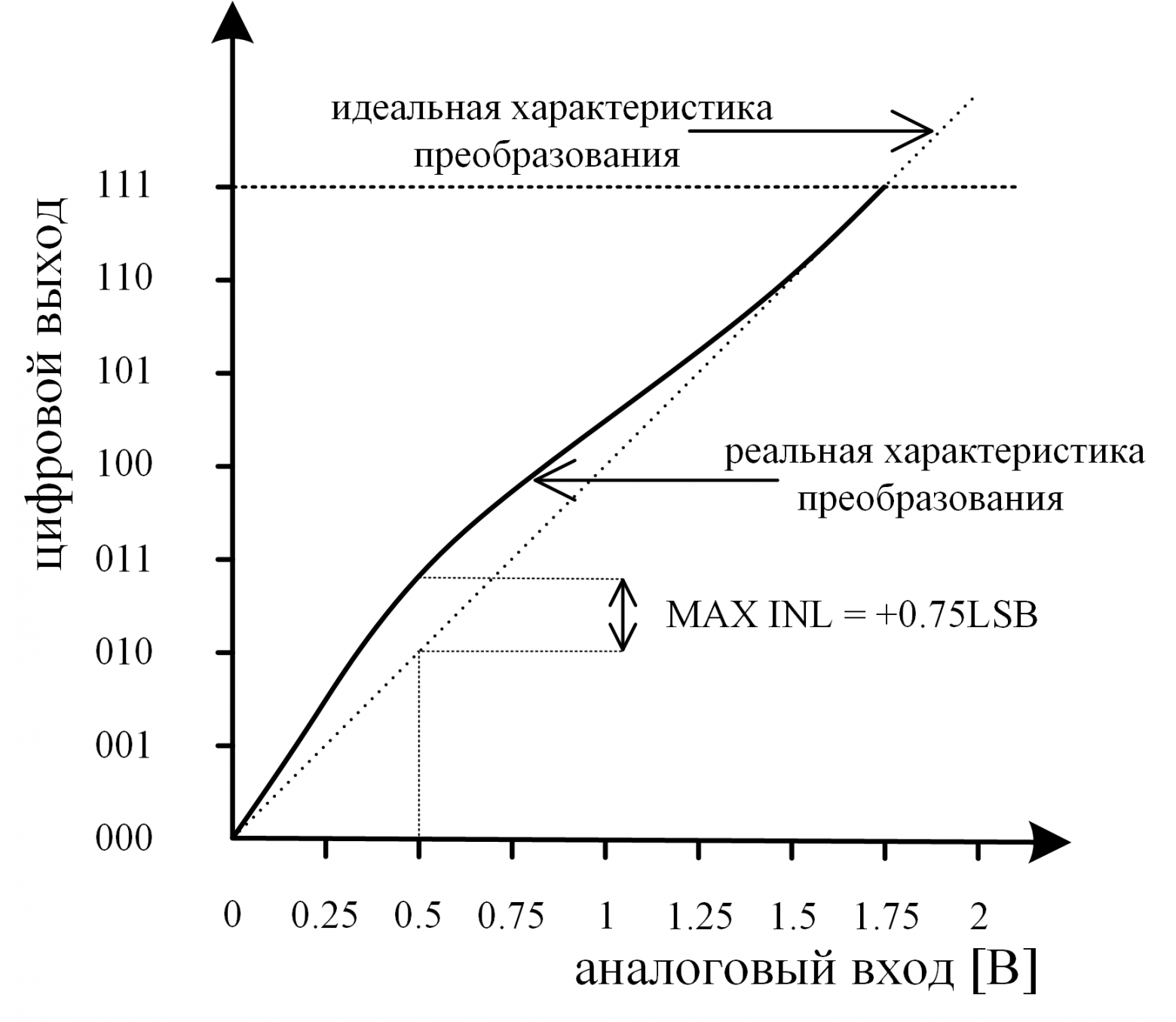
Интегральная нелинейность — представляет собой максимальное отклонение любого кода от прямой линии, проведенной через крайние точки передаточной функции АЦП. Крайними точками являются: нулевая, находящаяся на 0.5LSB ниже точки появления первого кода, и последняя — на 0.5LSB выше граничного кода шкалы.
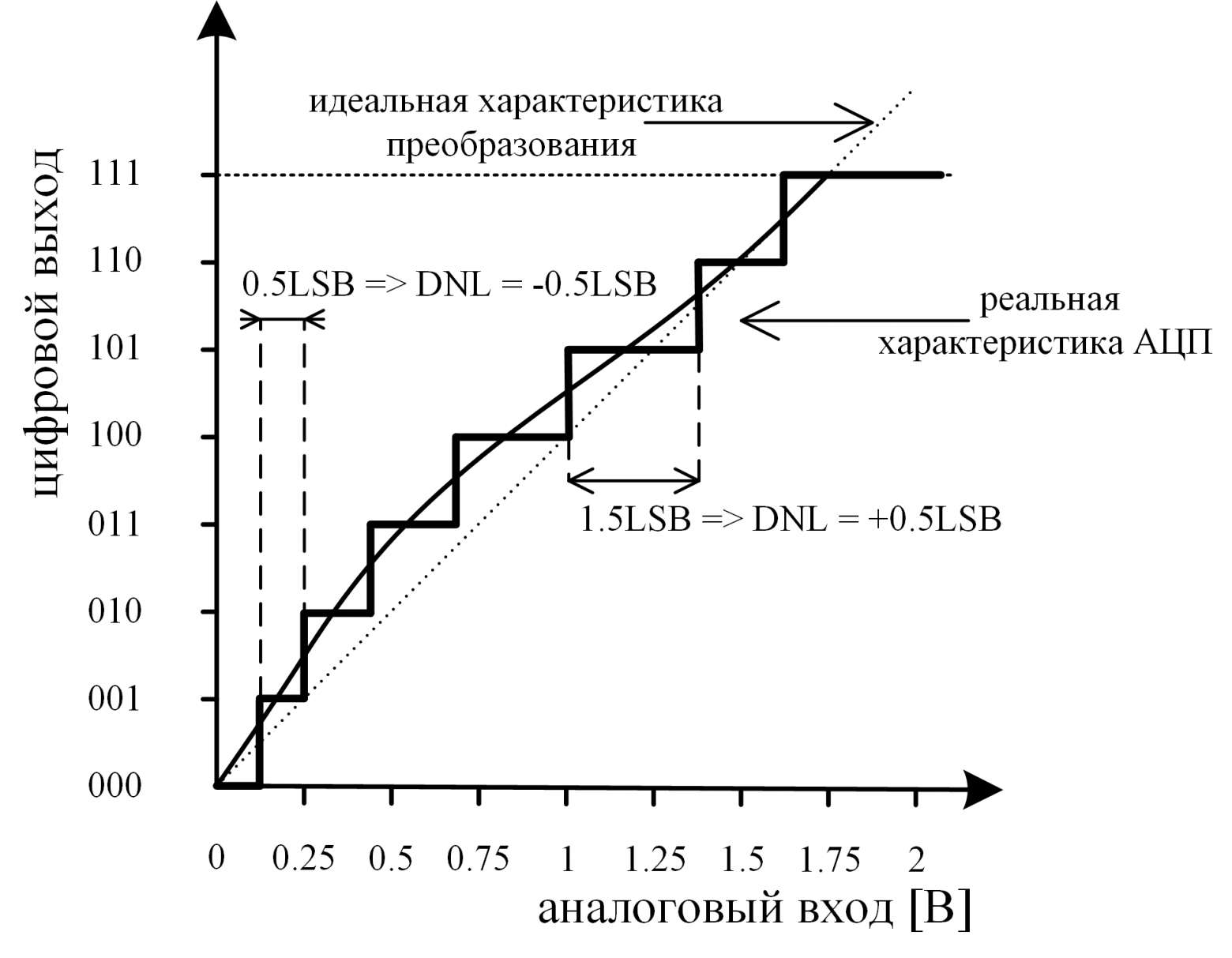
Дифференциальная нелинейность DNL (differential non-linearity) — представляет собой разницу между измеренной и идеальной шириной 1 кванта (1 LSB) АЦП.
Ошибка смещения — представляет собой отклонение момента первичной смены кода с (000Н) на (001Н) от идеального значения, то есть +0.5LSB.
Ошибка усиления — представляет отклонение реального коэффициента усиления тот идеального.
LSB (least significant bit) или МЗБ (младший значащий бит) – это наименьшее значение напряжения, которое может быть измерено АЦП. Находиться по формуле:

где Uоп – значения источника опорного напряжения (ИОН), N разрядность АЦП. В данном случае:

Uоп = 2,5 В — значение напряжения внутреннего ИОН.
Систематические ошибки – ошибки, величина которых одинакова во всех измерениях, приводящих одним и тем же методом с помощью одних и тех же измерительных приборов. Ошибка смещения и ошибка усиления относятся к случайным ошибкам.
Случайные ошибки – ошибки, величина которых различна даже дл измерений, выполненных одинаковым образом. Интегральная и дифференциальная нелинейности относятся к систематические ошибкам.
5.2 Погрешности АЦП
В АЦП и ЦАП различают четыре типа погрешностей по постоянному току: погрешность смещения, погрешность усиления и два типа погрешностей, связанных с линейностью: интегральная и дифференциальная нелинейность. Погрешности смещения и усиления АЦП и ЦАП аналогичны погрешностям смещения и усиления в усилителях.

Рисунок 5.1 – Погрешность смещения нуля
Погрешность смещения равна погрешности нуля во всем диапазоне входного напряжения и постоянна.

Рисунок 5.2 – Погрешность усиления
Погрешность усиления вызывает погрешность смещения. Причем погрешность смещения не постоянна и не равна погрешность смещения нуля.
Интегральная нелинейность ЦАП и АЦП аналогична нелинейности усилителя и определяется как максимальное отклонение фактической характеристики передачи преобразователя от прямой линии. В общем случае, она выражается в процентах от полной шкалы (но может представляться в значениях младших разрядов). Существует два общих метода аппроксимации характеристики передачи: метод конечных точек и метод наилучшей прямой.

Рисунок 5.3 – Определение погрешности измерения по а) методу конечных точек и по б) методу наилучшей прямой
При использовании метода конечных точек измеряется отклонение произвольной точки характеристики от прямой, проведенной из начала координат. Таким образом, измеряют значения интегральной нелинейности преобразователей, используемых в задачах измерения и управления.
Метод наилучшей прямой дает более адекватный прогноз искажений в приложениях, имеющих дело с сигналами переменного тока. Он менее чувствителен к нелинейностям технических характеристик. По методу наилучшего приближения через характеристику передачи устройства проводят прямую линию, используя стандартные методы интерполяции кривой. После этого максимальное отклонение измеряется от построенной прямой. Как правило, интегральная нелинейность, измеренная таким образом, учитывает только 50% нелинейности, оцененной методом конечных точек.
Другой тип нелинейности преобразователей – дифференциальная нелинейность. Она связана с нелинейностью кодовых переходов преобразователя. В идеальном случае изменение на единицу младшего разряда цифрового кода точно соответствует изменению аналогового сигнала на величину единицы младшего разряда. В АЦП, при переходе с одного цифрового уровня на следующий, значение сигнала на аналоговом входе должно измениться точно на величину, соответствующую младшему разряду цифровой шкалы. Наиболее распространенным проявлением DNL в АЦП являются пропущенные коды.
Переходы АЦП (идеальные) имеют место, начиная с 1/2 LSB выше нуля, и далее через каждый LSB, до 11/2 LSB ниже полной аналоговой шкалы. Так как входной аналоговый сигнал АЦП может иметь любое значение, а выходной цифровой сигнал квантуется, может существовать различие до 1/2 LSB между реальным входным аналоговым сигналом и точным значением выходного цифрового сигнала. Этот эффект известен как ошибка или неопределенность квантования. В приложениях, использующих сигналы переменного тока, эта ошибка квантования вызывает явление, называемое шумом квантования.

Рисунок 5.4 – Шум квантования АЦП
Среднеквадратичное значение шума. приблизительно равно весу наименьшего значащего разряда (LSB) Δ, деленному на √12. При этом предполагается, что амплитуда сигнала составляет, по крайней мере, несколько младших разрядов, так что выход АЦП изменяет свое состояние почти при каждом отсчете. Сигнал ошибки квантования от входного линейного пилообразного сигнала аппроксимируется сигналом пилообразной формы с максимальным размахом Δ , и его среднеквадратичное значение равно Δ/( √12). Поэтому средняя мощность шума кантования равна:

Отношение среднеквадратичного значения синусоидального сигнала, соответствующего полной шкале, к среднеквадратичному значению шума квантования (выраженное в дБ) равно:

где SNR (signal to noise ratio) – отношение сигнал-шум, N — число разрядов в идеальном АЦП. Это уравнение имеет силу только в том случае, если шум измерен на полной ширине полосы Найквиста от 0 до fД/2.
Таким образом, для АЦП микроконвертора ADUC842, используемого в лабораторном стенде LESO1, справедливо:

Для оценки погрешностей АЦП приведем характеристику АЦП, где указаны погрешности в значениях LSB и в напряжениях.
Таблица 5.1 – Характеристики АЦП ADuc842
| Параметры | Значение в LSB | Значение в мкВ | Примечание | |
| Точность по постоянному току | Разрядность | 12 битный | От внутреннего ИОН Uоп = 2,5 В | |
| Интегральная нелинейность | ±1 макс. ±0,3 сред. |
±610 макс. ±183 сред. |
||
| Дифференциальная нелинейность | ±1 макс. ±0,3 сред. |
±610 макс. ±183 макс. |
||
| Калибровочные ошибки конечных точек шкалы | Ошибка смещения | ±3 макс | ±1830 макс. | |
| Ошибка усиления | ±3 макс. | ±1830 макс. | ||
| Аналоговый вход | Диапазон входных напряжений | 0 ÷ Uоп В. | ||
| Входной ток | ±1 мкА макс. | |||
| Входная емкость | 32 пФ сред. |
Так как интегральная и дифференциальная нелинейности относятся к случайным ошибкам и являются независимыми друг от друга ошибками их необходимо сложить по «закону сложения независимых случайных ошибок»:

где X1,…,Xn – номинальные значения независимых случайных величин, ΔX1,…,ΔXn – ошибки случайных величин, Y — номинальное значение конечной измеряемой величины, ΔY – абсолютная ошибка конечной измеряемой величины.
Случайная ошибка АЦП будет состоять из интегральной и дифференциальной нелинейности, а также из ошибки квантования, которая составляет Δ/2 = 610мкВ/2 = 305мкВ = 0,305·10-3 В. Номинальное значения этих величин есть опорное напряжение АЦП, которое равно 2,5В.
Итак, относительная ошибка измерения АЦП:
Из относительной ошибки измерения АЦП найдем абсолютное значение ошибки измерения:

Систематическую ошибку составляют ошибка смещения нуля и ошибка усиления. Так как основную часть ошибки смещения и ошибки усиления вносит тракт передачи сигнала (инструментальный усилитель и масштабирующее звено), поправки вносятся программной калибровкой в LabVIEW.

Рисунок 5.5 – Калибровка в LabVIEW
5.3 Экспериментальные исследования
В задачу каждого измерения входит оценка точности полученного результата. Но в результате измерении мы всегда получаем нужную величину с некоторой погрешностью.Смысл экспериментальных исследований состоит в том, чтобы проверить на опыте теоретические выкладки и дать оценку характеристикам прибора.
Результат экспериментального исследования АЧХ устройства без цифрового фильтра или аналогового фильтра Бесселя записан в таблице 5.2. Экспериментальные данные были сняты с помощью низкочастотного генератора сигналов Г3-112.
Таблица 5.2 – Измеренное АЧХ устройства без цифрового фильтра
 |
 |
 |
| 0 | 5,00 | 0,00 |
| 10 | 5,00 | 0,00 |
| 20 | 4,88 | -0,21 |
| 30 | 4,68 | -0,58 |
| 40 | 4,31 | -1,28 |
| 50 | 3,95 | -2,04 |
| 60 | 3,43 | -3,28 |
| 70 | 2,90 | -4,72 |
| 80 | 2,34 | -6,60 |
| 90 | 1,77 | -8,99 |
| 100 | 1,24 | -12,10 |
| 110 | 0,94 | -14,56 |
| 120 | 0,64 | -17,90 |
| 130 | 0,43 | -21,36 |
| 140 | 0,26 | -25,75 |
| 150 | 0,18 | -29,00 |
| 160 | 0,13 | -31,77 |
Проверим, действие цифрового фильтра на сигнал. Результаты измерения АЧХ после цифрового фильтра приведены в таблице 5.3.
Таблица 5.2 – Измеренное АЧХ устройства без цифрового фильтра
|
|
|
| 0 | 5,00 | 0,00 |
| 10 | 5,00 | 0,00 |
| 20 | 5,00 | 0,00 |
| 30 | 5,00 | 0,00 |
| 40 | 5,00 | 0,00 |
| 50 | 5,00 | 0,00 |
| 60 | 4,80 | -0,36 |
| 70 | 4,23 | -1,45 |
| 80 | 3,67 | -2,69 |
| 90 | 2,94 | -4,62 |
| 100 | 2,26 | -6,91 |
| 110 | 1,61 | -9,83 |
| 120 | 0,73 | -16,67 |
| 130 | 0,23 | -26,60 |
| 140 | 0,08 | -35,85 |
| 150 | 0,00 | -60,32 |
| 160 | 0,00 | -71,66 |
Для сравнения действия цифрового фильтра, приведем графики АЧХ устройства без и с цифровым фильтром. Как видно из рисунка 6.6, цифровой фильтр выравнивает амплитудную неравномерность. Полоса пропускания цифрового осциллографа-приставки на уровне -3 дБ, равна от 0 до 80 кГц.
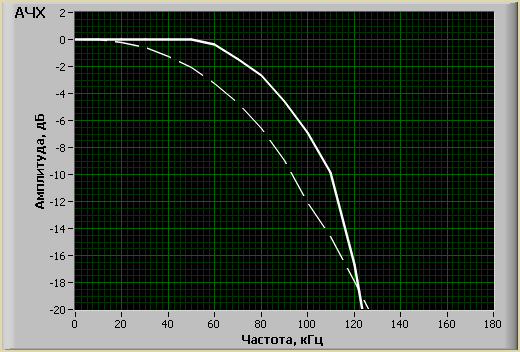
Рисунок 5.6 – АЧХ устройства без цифрового фильтр (штрих.) и с цифровым фильтром (сплош.)
Нелинейные искажения измерительного тракта можно оценить по первой гармонике. Уровень первой гармоники при номинальном входном напряжении Uвх = 5В на частоте 10 кГц равен -65дБ.
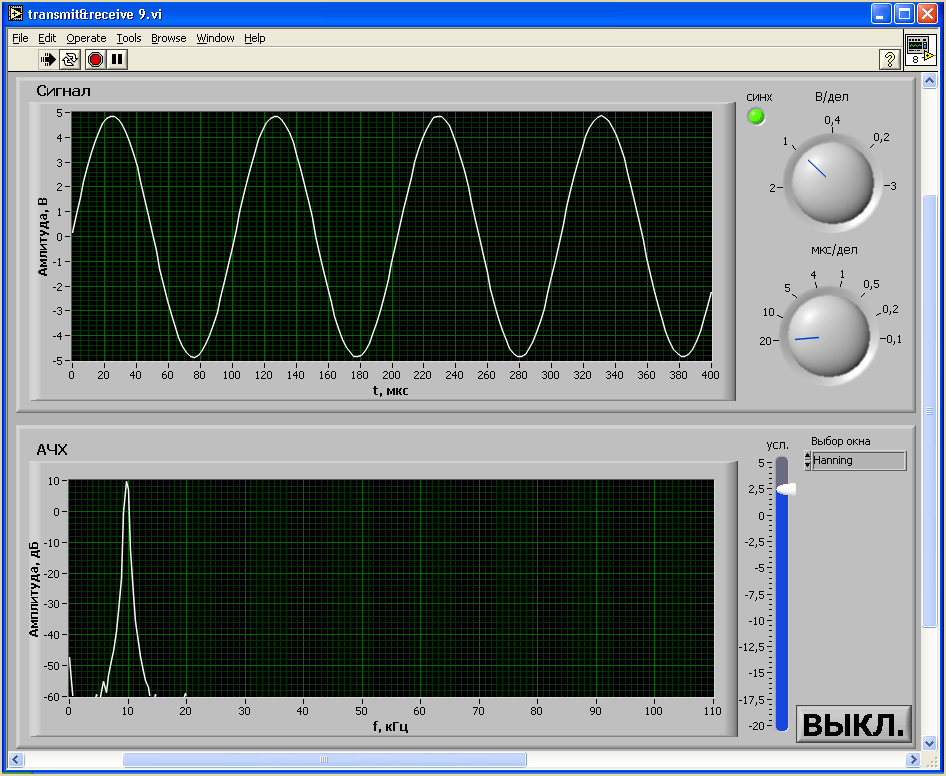
Рисунок 5.7 — Уровень первой гармоники при номинальном входном напряжении 5В
На цифровой осциллограф-приставку подавались тестовые испытательные сигналы трех видов: синусоидального, треугольного и прямоугольного частотой 10 кГц. Результаты измерений приведены на рисунках 5.8, 5.9 и 5.10 соответственно синусоидального, треугольного и прямоугольного сигналов.
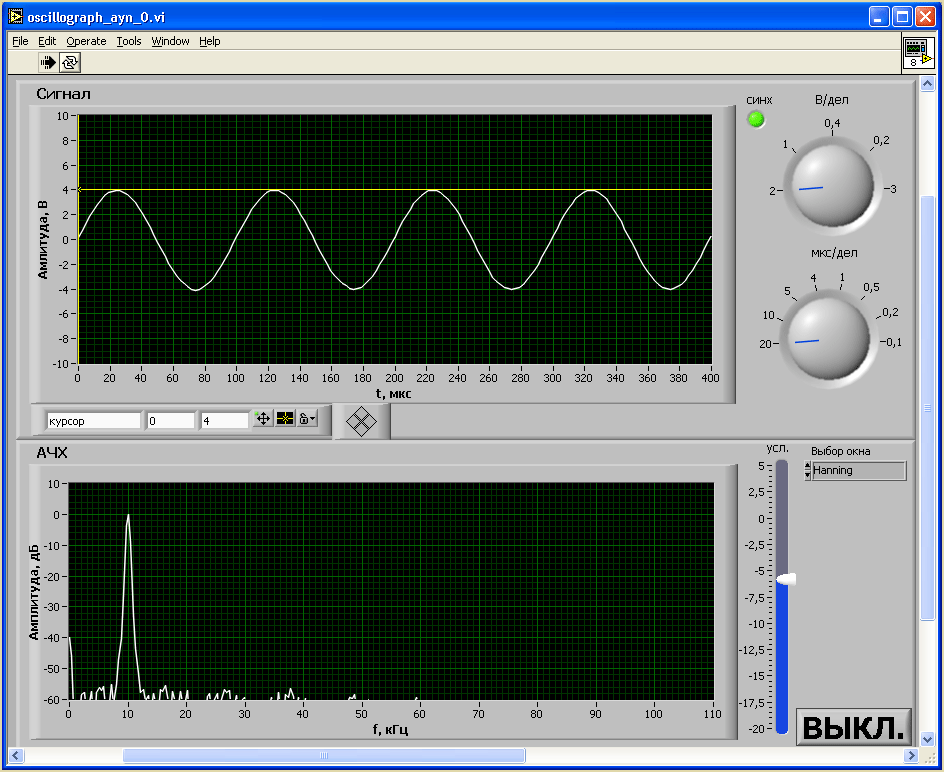
Рисунок 5.8 — Измерение синусоидального сигнала цифровым осциллографом-приставкой
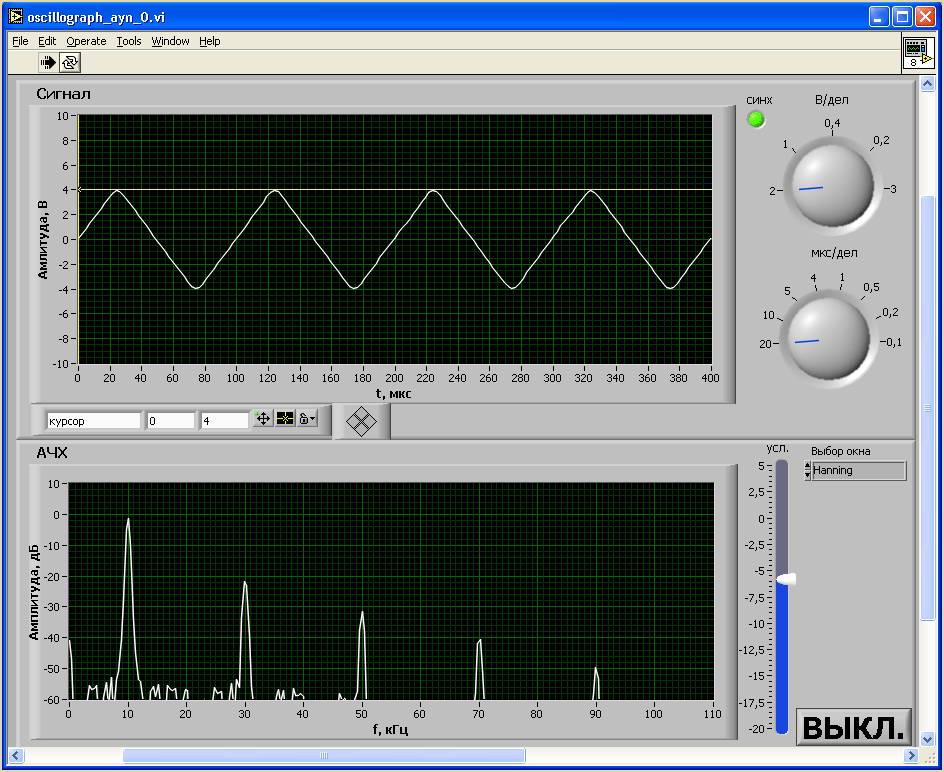
Рисунок 5.9 — Измерение треугольного сигнала цифровым осциллографом-приставкой

Рисунок 5.10 — Измерение прямоугольного сигнала цифровым осциллографом-приставкой
5.4 Выводы
Проанализированы основные источники погрешности измерений, определено из чего состоит ошибка измерения цифровым осциллографом-приставкой. Она состоит в из случайной и систематической ошибок. Случайная ошибка АЦП менее 0,1 %, а систематическая корректируется программной калибровкой в LabVIEW.
На рисунке 5.6 показано, насколько цифровой фильтр корректирует АЧХ аналогового фильтра.
Экспериментальные исследования тестовыми сигналами показывают, что уровень первой гармоники при номинальном входном напряжении Uвх = 5В на частоте 10 кГц равен -65дБ, что очень хорошо.
Раскладываем по полочкам параметры АЦП
Время на прочтение
10 мин
Количество просмотров 60K
Привет, Хабр! Многие разработчики систем довольно часто сталкиваются с обработкой аналоговых сигналов. Не все манипуляции с сигналами можно осуществить в аналоговой форме, поэтому требуется переводить аналог в цифровой мир для дальнейшей постобработки. Возникает вопрос: на какие параметры стоит обратить внимание при выборе микроконтроллера или дискретного АЦП? Что все эти параметры означают? В этой статье постараемся детально рассмотреть основные характеристики АЦП и разобраться на что стоит обратить внимание при выборе преобразователя.
Введение
Начать бы хотелось с интересного философского вопроса: если аналоговый сигнал — это бесконечность, теряем ли мы при оцифровке сигнала бесконечное количество информации? Если это так, тогда какой смысл существования такого неэффективного преобразования?
Для того, чтобы ответить на этот вопрос, разберемся с тем, что такое аналого-цифровое преобразование сигнала. Основной график, который отражает работу АЦП – передаточная характеристика преобразования. В идеальном мире это была бы прямая линия, то есть у каждого аналогового уровня сигнала имелся бы единственный цифровой эквивалент.

Рис. 1: Идеальная характеристика АЦП
Однако из-за наличия различных видов шума, мы не можем увеличивать разрядность АЦП до бесконечности. То есть существует предел, который ограничивает минимальную цену деления шкалы. Другими словами, уменьшая деление шкалы мы рано или поздно «упремся» в шум. Да, конечно, можно сделать хоть 100-битный АЦП, однако большинство бит данного АЦП не будут нести полезную информацию. Именно поэтому характеристика АЦП имеет ступенчатую форму, что равносильно наличию конечной разрядности АЦП.
Проектируя систему необходимо выбирать АЦП, который бы обеспечил отсутствие потери информации при оцифровке. Для того, чтобы выбрать преобразователь, необходимо понять, какие параметры его характеризуют.
Параметры АЦП можно разделить на 2 группы:
- Статические — характеризуют АЦП при постоянном или очень медленно изменяющемся входном сигнале. К данным параметрам можно отнести: максимальное и минимальное допустимое значение входного сигнала, разрядность, интегральную и дифференциальную нелинейности, температурную нестабильность параметров преобразования и др.
- Динамические — определяют максимальную скорость преобразования, предельную частоту входного сигнала, шумы и нелинейности.
Статические параметры
- Максимальный (Vref) и минимальный (обычно 0) уровни входного сигнала — устанавливают диапазон шкалы преобразования, относительно которой будет оцениваться входной сигнал (рис. 1). Также этот параметр может обозначаться как FS — full scale. Для дифференциального АЦП шкала определяется от -Vref до +Vref, однако для упрощения далее будем рассматривать только single-ended шкалы.
- Разрядность (N) — разрядность выходного кода, характеризующая количество дискретных значений (
 ), которые преобразователь может выдать на выходе (рис. 1).
), которые преобразователь может выдать на выходе (рис. 1). - Ток потребления (Idd) — сильно зависит от частоты преобразования, поэтому информацию об этом параметре лучше искать на соответствующем графике.
- МЗР (LSB) – младший значащий разряд (Least Significant Bit) — минимальное входное напряжение, разрешаемое АЦП (по сути единичный шаг в шкале преобразования). Определяется формулой: (рис. 1).
- Ошибка смещения (offset error) – определяется как отклонение фактической передаточной характеристики АЦП от передаточной характеристики идеального АЦП в начальной точке шкалы. Измеряется в долях LSB. При ошибке смещения переход выходного кода от 0 в 1 происходит при входном напряжении отличном от 0.5LSB (рис. 2).
 Рис. 2: Ошибка смещения
Рис. 2: Ошибка смещения
Существует и другой вариант квантователя, когда переход осуществляется при целых значения LSB (характеристика у него будет смещена относительно первого варианта, который представлен на рисунке 2). Оба этих квантователя равноправны, и для простоты далее будем рассматривать только первый вариант. - Ошибка усиления (gain error) – определяется как отклонение средней точки последнего шага преобразования (которому соответствует входное напряжение Vref) реального АЦП от средней точки последнего шага преобразования идеального АЦП после компенсации ошибки смещения (рис. 3).
Рис. 3: Ошибка усиления
- Дифференциальная нелинейность (DNL — Differential nonlinearity) – отклонение ширины ступеньки на передаточной характеристике реального АЦП от номинальной ширины ступеньки у идеального преобразователя. Из-за дифференциальной нелинейности шаги квантования имеют различную ширину (рис. 4).

Рис. 4: Дифференциальная нелинейность
Для 3-х битного АЦП с рисунка 4:
- Интегральная нелинейность ( INL — Integral nonlinearity) – разница по вертикали между реальной и идеальной характеристикой преобразования (рис. 5). INL можно интерпретировать как сумму DNL. Отрицательная INL указывает на то, что реальная характеристика находится ниже идеальной в данной точке шкалы. Для положительной INL реальная характеристика находится выше идеальной. Распределение DNL определяет интегральную нелинейность АЦП.
Рис. 5: Интегральная нелинейность
- Общая нескорректированная ошибка ( TUE — Total Unadjusted Error) – абсолютная ошибка, включающая в себя следующие ошибки: квантования, смещения, усиления и нелинейности. Другими словами, это максимальное отклонение между реальной и идеальной характеристикой преобразования. Для идеального АЦП TUE = 0.5LSB, обусловлена ошибкой квантования (или шум квантования — возникает из-за округления значения аналогового сигнала, которое соответствует цифровому коду). Ошибки усиления и смещения обычно вносят наиболее весомый вклад в абсолютную ошибку. Однако с точки зрения динамических параметров (см. ниже) ошибки смещения и усиления ничтожны, так как они не порождают нелинейных искажений.
 ), которые преобразователь может выдать на выходе (рис. 1).
), которые преобразователь может выдать на выходе (рис. 1). (рис. 1).
(рис. 1).
 Рис. 2: Ошибка смещения
Рис. 2: Ошибка смещения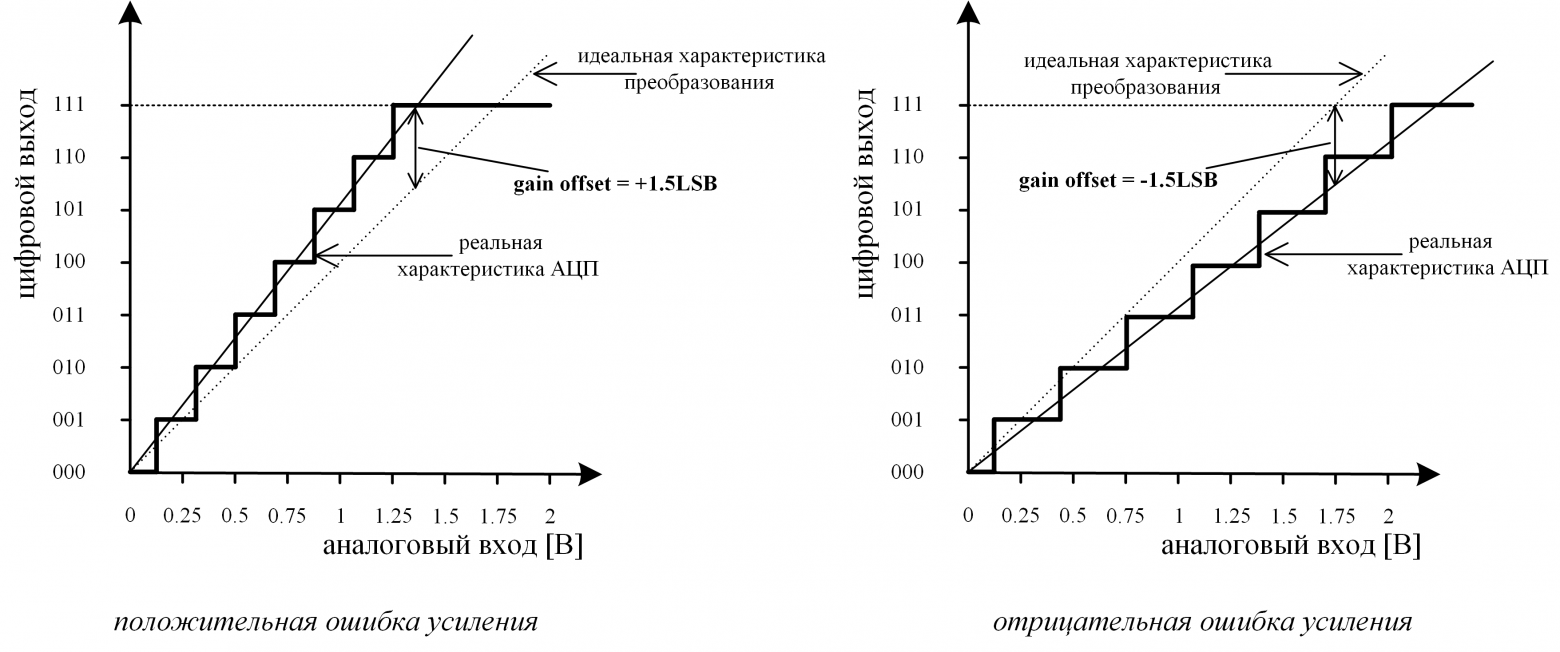 Рис. 3: Ошибка усиления
Рис. 3: Ошибка усиления

Динамические параметры
- Частота дискретизации (fs — sampling frequency) — частота, при которой происходит преобразование в АЦП (ну или 1/Ts, где Ts — период выборки). Измеряется числом выборок в секунду. Обычно под данным обозначением подразумевают максимальную частоту дискретизации, при которой специфицированы параметры преобразователя (рис. 6).

Рис. 6: Процесс преобразования АЦП
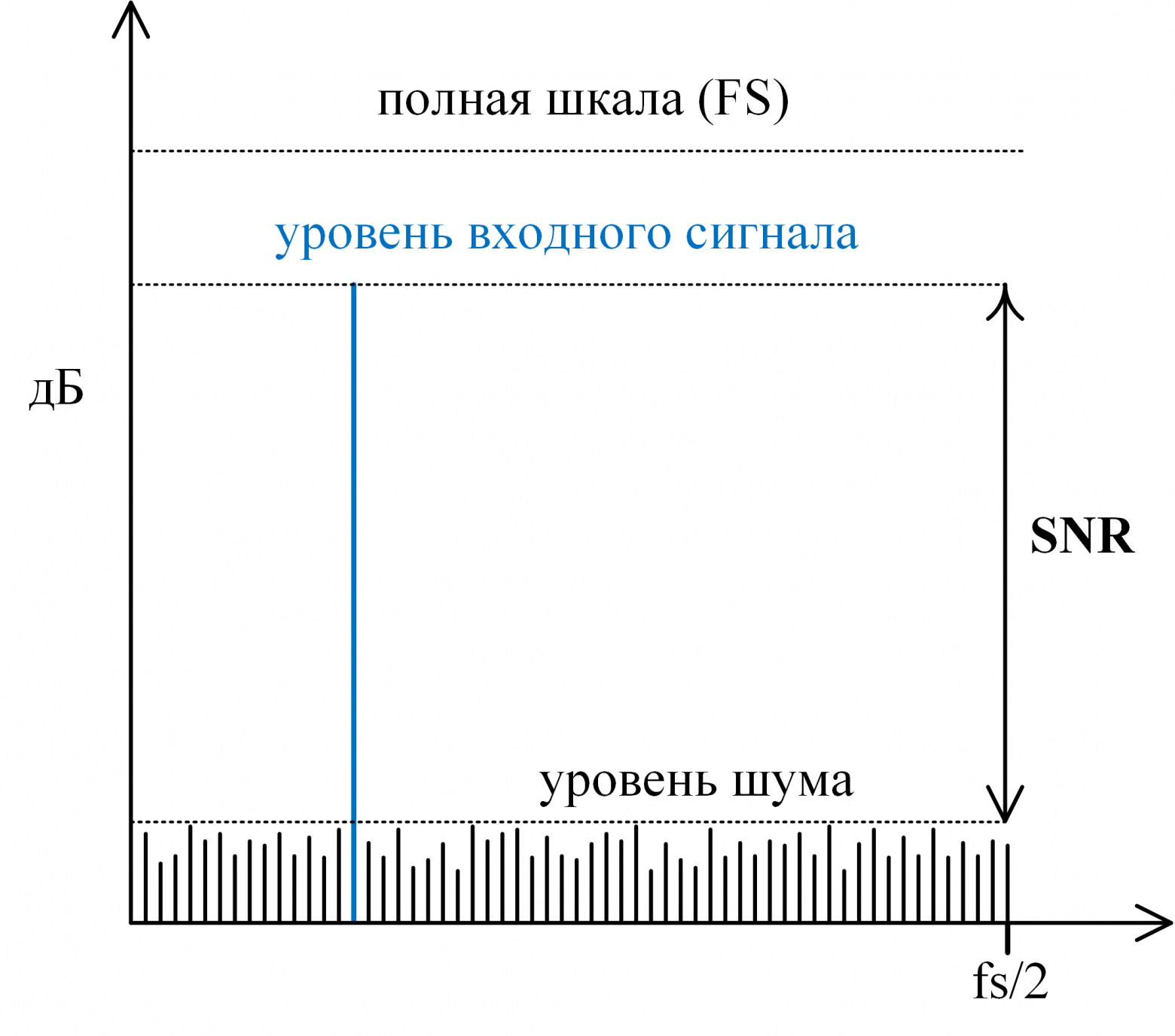
- Отношение сигнал/шум (SNR — Signal-to-Noise Ratio) — определяется как отношение мощности обрабатываемого сигнала к мощности шума, добавляемого в процессе преобразования. SNR обычно выражается в децибелах (дБ) и рассчитывается по следующей формуле:
Наглядно данное выражение продемонстрированно на рисунке 7.

Рис. 7: Отношение сигнал/шум
Для оценки SNR АЦП при разработке системы можно воспользоваться следующей формулой:
Первые 2 слагаемых учитывают уровень сигнала и ошибку квантования (нужно понимать, что формула верна для сигнала размаха полной шкалы). Третье слагаемое учитывает эффект передискретизации (выигрыш по обработке или processing gain): если полоса обрабатываемого сигнала (BW < fs/2), то, применив цифровой фильтр низких частот (либо полосовой, тут зависит все от полосы и несущей) к результату преобразования, можно вырезать часть шума АЦП, а оставшаяся часть будет распределена от 0 до BW (рис. 8). Если шум АЦП равномерно распределен по всем частотам (т.н. «белый» шум) интегральный шум после фильтрации уменьшится в fs/2 / BW раз, что и отражает третий член формулы.
Рис. 8: Увеличение SNR за счет передискретизации
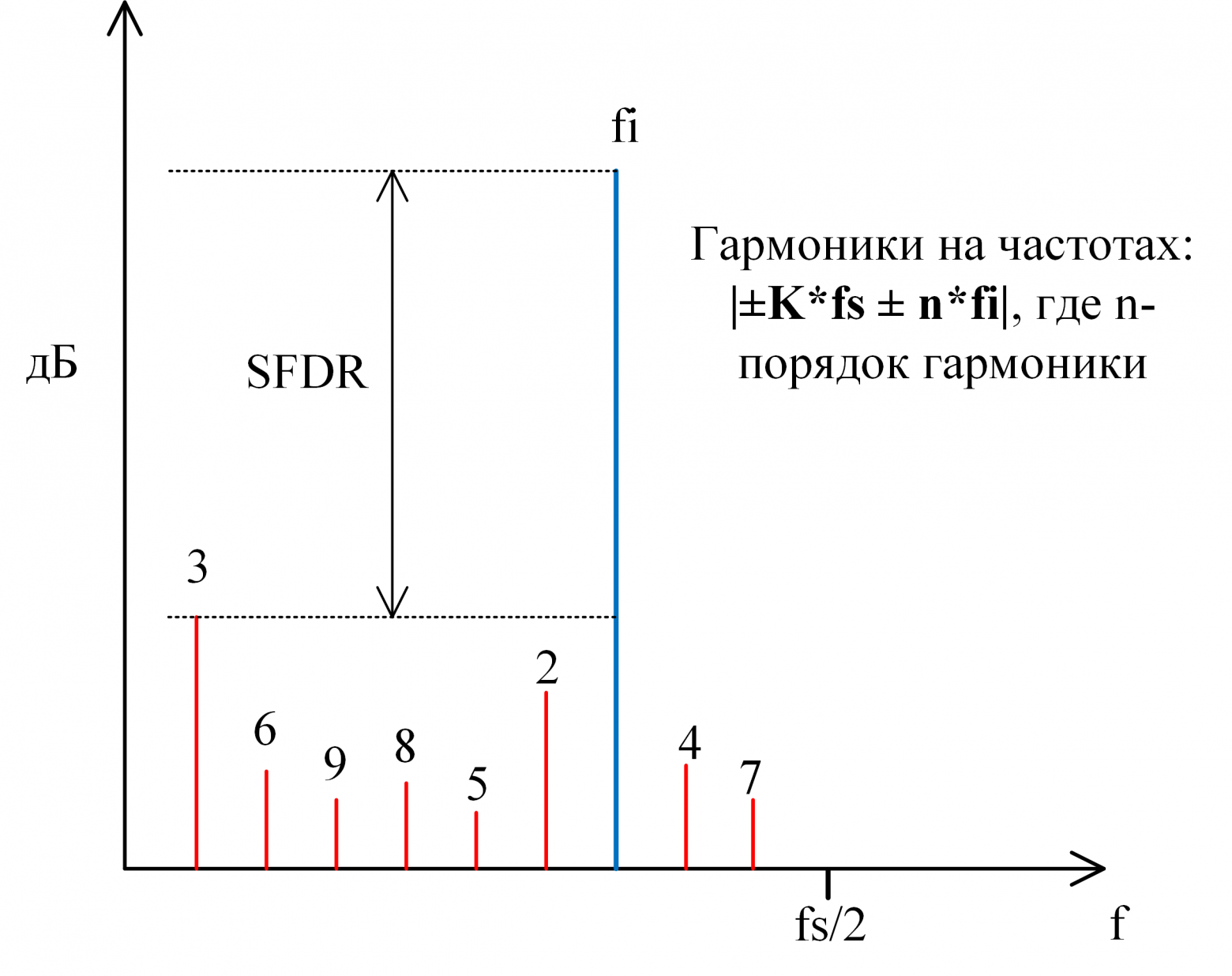
- Общие нелинейные искажения (THD — total harmonic distortion). Прежде, чем сигнал преобразовывается в цифровой код, он проходит через нелинейные блоки, которые искажают сигнал. К примеру, пусть есть сигнал с частотой f. Пройдя через нелинейный блок к нему добавятся компоненты с частотами 2f, 3f, 4f … — 2-я, 3-я, 4-я и т.д. гармоники входного сигнала. Если дискретизированный сигнал разложить в спектр с помощью ДПФ (Дискретного Преобразования Фурье), мы увидим, что все эти гармоники «перенеслись» в первую зону Найквиста (от 0 до fs/2) (рис. 9).
Рис. 9: Нелинейные искажения
Побочные гармоники искажают обрабатываемый сигнал, что ухудшает производительность системы. Этот эффект можно измерить, используя характеристику общие нелинейные искажения. THD определяется как отношение суммарной мощности гармонических частотных составляющих к мощности основной (исходной) частотной составляющей (в некоторых документациях выражается в дБ):
- Динамический диапазон, свободный от гармоник (SFDR — Spurious-Free Dynamic Range). Является отношением мощности полезного сигнала к мощности наибольшего «спура» (любая паразитная составляющая в спектре, не обязательно гармонического происхождения), присутствующего в спектре (рис. 9).
- Отношение сигнал / шум и нелинейные искажения (SINAD — signal-to-noise and distortion ratio). Аналогичен SNR, но помимо шума учитывает все виды помех и искажений, возникающих при аналого-цифровом преобразовании. SINAD является одним из ключевых параметром, характеризующим АЦП (в некоторых источниках обозначается как SNDR):
- Эффективное число бит (ENOB — effective number of bits) – некая абстрактная характеристика, показывающая сколько на самом деле бит в выходном коде АЦП несет в себе полезную информацию. Может принимать дробные значения.
- Интермодуляционные искажения (IMD — intermodulation distortion). Рассмотренные прежде динамические параметры измеряются, когда на вход подается однотональный гармонический сигнал. Такие однотональные тесты хороши, когда АЦП обрабатывает широкополосные сигналы. В этом случае гармоники, располагающиеся выше fs/2 отражаются в первую зону Найквиста и, следовательно, всегда учитываются в расчете параметров. Однако, имея дело с узкополосными сигналами или АЦП с передискретизацией, даже гармоники низкого порядка (2-я, 3-я) могут иметь достаточно высокую частоту, чтобы выйти из рассматриваемого частотного диапазона (или не отразиться в этот диапазон в случае выхода за fs/2). В этом случае эти гармоники не будут учтены, что приведёт к ошибочному завышению динамических параметров.
Для решения этой проблемы используются бигармонические тесты. На вход подают две спектрально чистых синусоиды одинаковой мощности с частотами и , которые находятся на близком расстоянии друг от друга. Нелинейность преобразователя порождает дополнительные тоны в спектре (их называют интермодуляционными искажениями) на частотах , где – произвольные целые числа.
Полезность бигармонического теста в том, что некоторые из интермодуляционных продуктов располагаются в спектре очень близко к исходному сигналу и, следовательно, дают полную информацию о нелинейности АЦП. В частности, интермодуляционные искажения 3-го порядка находятся на частотах и (рис. 10).
Рис. 10: интермодуляционные искажения
При построении РЧ систем могут быть интересны так же продукты 2-го и более высокого порядка. Параметр АЦП, характеризующий его интермодуляционные искажения n-го порядка, определяется формулой:
[dBc], где – мощность идентичных синусоид на входе, – мощность одного из продуктов. Например – отношение мощности на к мощности на







 и
и  , которые находятся на близком расстоянии друг от друга. Нелинейность преобразователя порождает дополнительные тоны в спектре (их называют интермодуляционными искажениями) на частотах
, которые находятся на близком расстоянии друг от друга. Нелинейность преобразователя порождает дополнительные тоны в спектре (их называют интермодуляционными искажениями) на частотах  , где
, где  – произвольные целые числа.
– произвольные целые числа. и
и  (рис. 10).
(рис. 10).

 [dBc], где
[dBc], где  – мощность идентичных синусоид на входе,
– мощность идентичных синусоид на входе,  – мощность одного из продуктов. Например
– мощность одного из продуктов. Например  – отношение мощности на
– отношение мощности на 
Полоса пропускания АЦП и субдискретизация (undersamling/sub-sampling)
Полоса пропускания преобразователя (FPBW — Full Power (Analog) Bandwidth). Обычно ширина полосы преобразователя составляет несколько зон Найквиста. Этот параметр должен быть в спецификации, но, если его нет, можно попробовать самостоятельно оценить минимально возможное значение полосы пропускания для данного АЦП. За период выборки емкость УВХ должна зарядиться с точностью 1 LSB. Если период выборки равен  , то ошибка выборки сигнала полной шкалы равна:
, то ошибка выборки сигнала полной шкалы равна:

Решив относительно t, получаем:

Положив, что  , определим минимальную полосу АЦП (для
, определим минимальную полосу АЦП (для  ):
):

Например, для 16 битного АЦП с частотой дискретизации 80 Мвыб/c и шкалой 2 В ограничение снизу для полосы пропускания, рассчитанное по этой формуле, составит FPBW = 282 МГц.
Analog Bandwidth является очень важным параметром при построении систем, которые работают в режиме субдискретизации (“undersampling”). Объясним это подробнее.
Согласно критерию Найквиста, ширина спектра обрабатываемого сигнала должна быть как минимум в 2 раза меньше частоты дискретизации, чтобы избежать элайзинга. Здесь важно, что именно ширина полосы, а не просто максимальная частота сигнала. Например, сигнал, спектр которого расположен целиком в 6-й зоне Найквиста может быть теоретически дискретизован без потери информации (рис. 11). Ограничив спектр этого сигнала антиэлайзинговым фильтром, его можно подавать на дискретизатор с частотой fs. В результате сигнал отразится в каждой зоне.
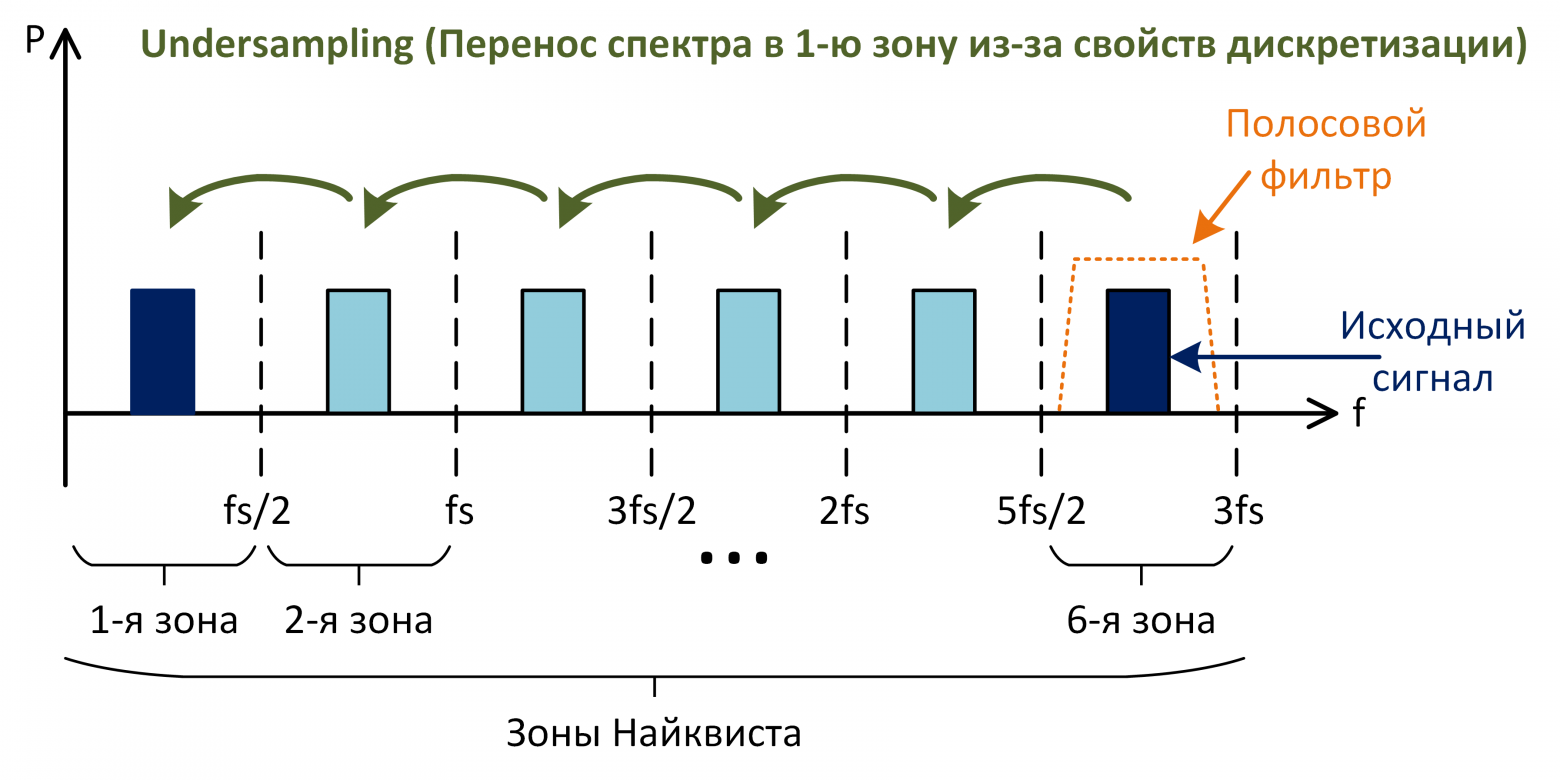
Рис. 11: undersampling
Свойство переноса спектра при дискретизации
Undersampling или sub-sampling имеет место быть из-за свойств дискретизации. Рассмотрим на примере, пусть имеется сигнал a(t) и его спектральная плотность  (рис. 12). Необходимо найти спектральную плотность
(рис. 12). Необходимо найти спектральную плотность  сигнала после дискретизации сигнала
сигнала после дискретизации сигнала  .
.
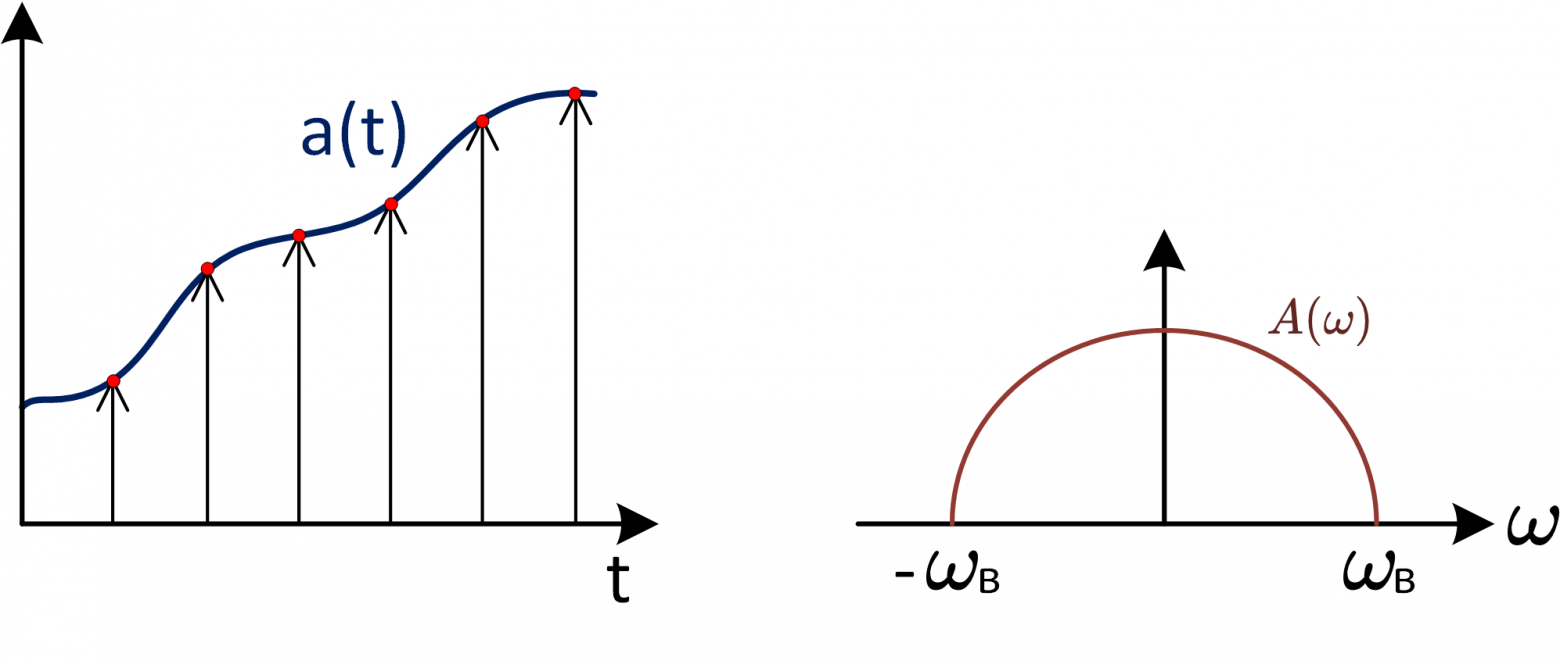
Рис 12: дискретизация непрерывного сигнала
По фильтрующему свойству дельта-функции:

После дискретизации  :
:

где 
С помощью формулы Релея вычислим спектр:


Из этого выражения следует что спектр сигнала будет повторяться во всех зонах Найквиста.
Итак, если есть хороший антиэлайзинговый фильтр, то соблюдая критерий Найквиста, можно оцифровывать сигнал с частотой дискретизации намного ниже полосы АЦП. Но использовать субдискретизацию нужно осторожно. Следует учитывать, что динамические параметры АЦП деградируют (иногда очень сильно) с ростом частоты входного сигнала, поэтому оцифровать сигнал из 6-й зоны так же «чисто», как из 1-й не получится.
Несмотря на это субдискритезация активно используется. Например, для обработки узкополосных сигналов, когда не хочется тратиться на дорогой широкополосный быстродействующий АЦП, который вдобавок имеет высокое потребление. Другой пример – выборка ПЧ (IF-sampling) в РЧ системах. Там благодаря undersampling можно исключить из радиоприемного тракта лишнее аналоговое звено — смеситель (который переносит сигнал на более низкую несущую или на 0).
Сравним архитектуры
На данный момент в мире существует множество различных архитектур АЦП. У каждой из них есть свои преимущества и недостатки. Не существует архитектуры, которая бы достигала максимальных значений всех, описанных выше параметров. Проанализируем какие максимальные параметры скорости и разрешения смогли достичь компании, выпускающие АЦП. Также оценим достоинства и недостатки каждой архитектуры (более подробно о различных архитектурах можно прочитать в статье на хабр).
Таблица сравнения архитектур
Информацию для таблицы брал на сайте arrow, поэтому если что-то упустил поправляйте в комментариях.
Заключение
Описав параметры разрабатываемой вами системы, можно понять, какие характеристики АЦП для вас являются критичными. Однако не стоит забывать, что динамические параметры преобразователей сильно зависят от многих факторов (частота дискретизации, частота входного сигнала, амплитуда входного сигнала и тд.) Зачастую в таблицах параметров в документации указывают только «красивые» (с точки зрения маркетинга) цифры. Приведу пример, возьмем АЦП ad9265 и рассмотрим его параметр SFDR при частоте входного сигнала 70 МГц:
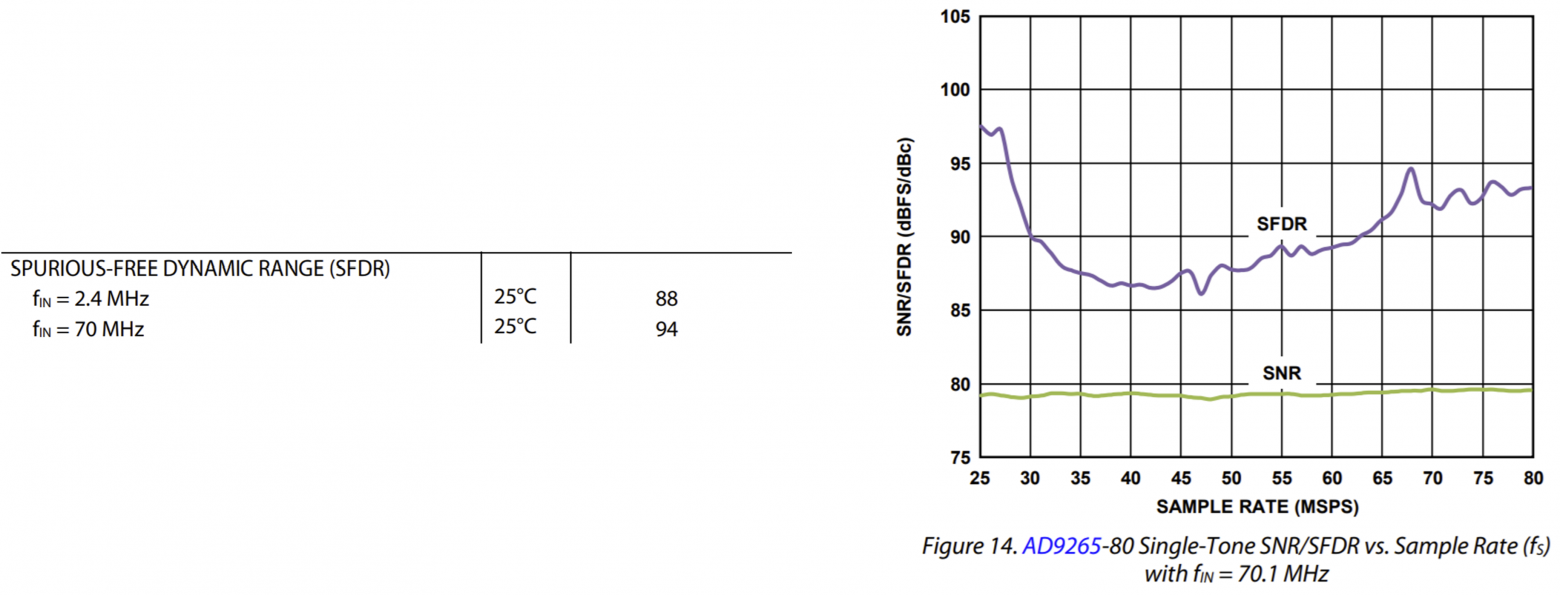
Таблица показывает значение SFDR при максимальных значениях частоты дискретизации, однако если вы будете использовать частоту ниже (к примеру 40 МГц), вы не получите этих «хороших» значений. Поэтому советую анализировать характеристики АЦП по графикам, чтобы примерно понимать, сможет ли данная микросхема обеспечить нужную вам точность преобразования.
Main Content
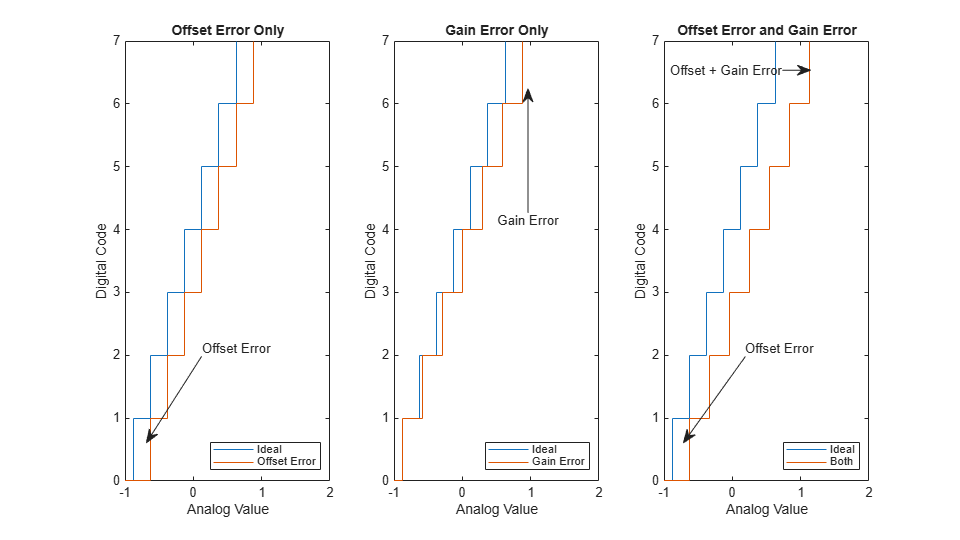
This example shows how offset error and gain error are calculated and how each affects the transfer curve of an ADC. Offset error and gain error characterize part of the linearity error in an ADC.
Offset error is the difference between the center of the least significant code and the center of the same code on an ideal ADC with the same number of bits. Offset error is usually reported in units of the least significant bit (LSB) of the converter. One LSB is equivalent to the converter’s quantization interval.
Gain error in LSB is the difference between the center of the most significant code after offset error correction and the center of the same code on an ideal ADC with the same number of bits.
Due to the difficulty in determining the precise location of the center of a code with a non finite boundary, these values are most commonly measured with respect to the first and last threshold of the converter, respectively.
Units for Offset Error and Gain Error
The unit  , which is used in this example, is defined as:
, which is used in this example, is defined as:
Thus, an error in  (volts) translates into as follows:
(volts) translates into as follows:
where  is the full scale range of the ADC and
is the full scale range of the ADC and  is the number of bits of the ADC.
is the number of bits of the ADC.
Linearity errors are also commonly reported in normalized units with respect to the full scale range:
Another unit sometimes used for linearity errors used is percent full scale. Percent full scale is defined as normalized units multiplied by 100:
Calculate Offset Error and Gain Error
Use a 3-bit ADC with dynamic range [-1 1]. Define an offset error of 1 LSB and a gain error of 1 LSB.
Nbits = 3;
Range = [-1 1]; % ADC Full Scale Range
OffsetError = 1;
GainError = 1;
LSB = (max(Range) - min(Range)) / (2^Nbits - 1);
The digital codes from the ideal ADC are identical to those from the experimental ADCs.
[TC0Analog, TC0Digital] = og2tc(Nbits, Range, 0, 0); % Ideal ADC Transfer Curve TC1Analog = og2tc(Nbits, Range, OffsetError, 0); % Offset Error Only TC2Analog = og2tc(Nbits, Range, 0, GainError); % Gain Error Only TC3Analog = og2tc(Nbits, Range, OffsetError, GainError); % Both Offset Error and Gain Error plotAdcTcForExample(TC0Digital, TC0Analog, TC1Analog, TC2Analog, TC3Analog, Nbits);
The sum of offset error and gain error is known as full-scale error. In monopolar converters zero error, essentially offset error defined at analog level 0, is identical to regular offset error. In bipolar converters such as those above, offset error and zero error are different quantities.
Use of Linearity Errors as Impairments
Compare a flash ADC with offset and gain error to one with no impairments.
model = 'OffsetGainExample'; open_system(model); open_system([model '/Time Scope']); sim(model);
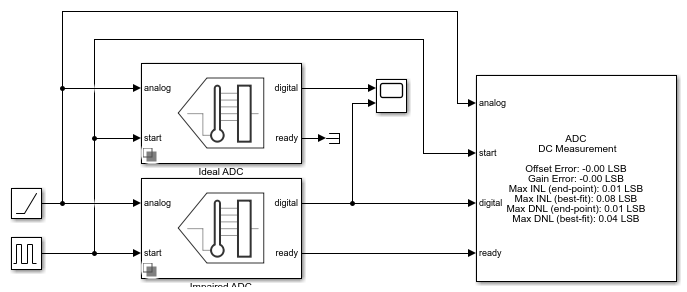
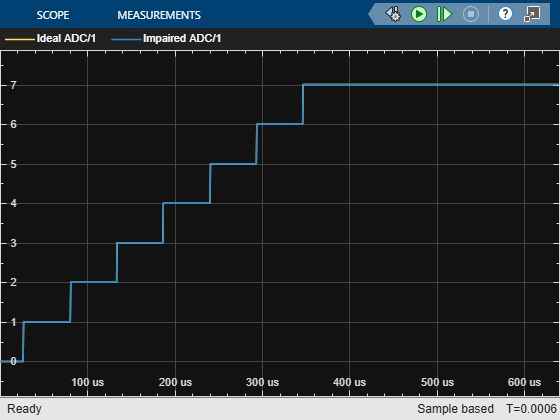
The ADC DC Measurement block confirms the values of the impairments to within a margin of error determined by the sample rate of the system. The offset error and gain error were both entered as 1 LSB. Offset error was measured as 1.08 LSB and gain error was measured as 0.97 LSB. Errors in these measurements are due to the converter not sampling exactly at its threshold values. The maximum expected error in LSB is:
where  is the slope of the input ramp/sawtooth signal in LSB/s, and
is the slope of the input ramp/sawtooth signal in LSB/s, and  is the ADC’s conversion start frequency.
is the ADC’s conversion start frequency.
See Also
Flash ADC | ADC DC Measurement
- Trial Software
- Trial Software
- Product Updates
- Product Updates
![]()
Разрешающей способности соответствует приращение входного напря-
жения АЦП Uвх при изменении цифрового отсчета на единицу младшего разряда
(ЕМР). Это приращение является шагом квантования. Для двоичных кодов пре-
образования номинальное значение шага квантования U = Uпш/(2N-1), где Uпш —
номинальное максимальное входное напряжение АЦП (напряжение полной шкалы), соответствующее максимальному значению выходного кода, N — разряд-
ность АЦП. Чем больше разрядность преобразователя, тем выше его разрешаю-
щая способность.
Ошибка смещения нуля заключается в том, что нулевое напряжение на входе АЦП соответствует некоторой ненулевой величине UСМ. Она обычно выра-
жается в процентах от напряжения полной шкалы или в виде количества квантов напряжения, соответствующих ЕМР. В результате код на выходе АЦП соответ-
ствует входному напряжению с некоторым смещением.
|
UВХ |
Реальная пере- |
|
даточная функ- |
|
|
ция |
|
UСМ |
Идеальная переда- |
|
|
точная функция |
||
|
Код |
Рисунок 87 – Ошибка смещения нуля АЦП
Ошибка коэффициента преобразования (ошибка масштаба) определяет,
насколько наклон характеристики преобразования отличается от заявленного зна-
чения (UМ). Данная величина может выражаться в процентах от напряжения пол-
ной шкалы или в величине ошибки на полной шкале преобразователя в единицах ЕМР.

UВХ
|
Реальная пере- |
UМ |
|
даточная функ- |
|
|
ция |
Идеальная передаточная функция
Код
Рисунок 88 – Ошибка коэффициента преобразования АЦП
Интегральную нелинейность АЦП измеряют как максимальное отклонение от прямой линии, соединяющей крайние точки шкалы (UИ). Интегральную нелиней-
ность определяют либо в количестве квантов, либо в процентах от полной шкалы.
UВХ Реальная передаточная функция
UИ
Идеальная передаточная функция
Код
Рисунок 89 – Интегральная нелинейность АЦП
Дифференциальная нелинейность – это локальная характеристика АЦП. В иде-
альном случае при изменении входного аналогового сигнала на «единицу» циф-
ровой код также должен измениться на ЕМР, однако реально шаги АЦП могут иметь неравномерность. Дифференциальная нелинейность определяется как мак-
симальное отклонение величины кванта от его среднего по шкале значения (UД).
Выражается в ЕМР.

|
UВЫХ |
Реальная пере- |
|
|
даточная функ- |
Идеальная |
|
|
ция |
||
|
передаточ- |
||
|
ная функ- |
||
|
UД |
Код
Рисунок 90 – Дифференциальная нелинейность АЦП
Температурная нестабильность АЦП характеризуется температурными коэффициентами погрешности полной шкалы и погрешности смещения нуля.
Возникновение динамических погрешностей связано с дискретизацией сигналов,
изменяющихся во времени.
Динамические параметры АЦП.
Максимальная частота дискретизации — это наибольшая частота, с ко-
торой происходит преобразование значений сигнала в цифровые значения, при которой выбранный параметр АЦП не выходит за заданные пределы. Измеряется числом выборок в секунду. Выбранным параметром может быть, например, мо-
нотонность характеристики преобразования или погрешность линейности.
Время преобразования — это время, отсчитываемое от начала импульса дискретизации или начала преобразования до появления на выходе устойчивого кода, соответствующего данной выборке.
Время выборки – это время, в течение которого происходит «запомина-
ние» одного значения входного напряжения в устройстве выборки-хранения
(УВХ). При работе без УВХ равно времени преобразования АЦП.
11.3 ЦАП с резисторами веса
Ключи S представляют собой аналоговые коммутаторы, управляемые циф-
ровыми сигналами. В простейшем случае это полевой транзистор, на затвор кото-
рого подается управляющий сигнал, переводящий канал транзистора из выклю-
ченного состояния во включенное и обратно. Ключи S переключаются внешними цифровыми сигналами, подключая резисторы к источнику опорного напряжения.
Через резисторы протекает соответствующий весу разряда ток. Сопротивление резисторов уменьшается в два раза от разряда к разряду.
|
R |
|||||||||||||||
|
Uоп |
|||||||||||||||
|
4R |
I |
||||||||||||||
|
S3 |
|||||||||||||||
|
Uвых |
|||||||||||||||
|
I3 |
|||||||||||||||
|
S2 |
2R |
||||||||||||||
|
I2 |
|||||||||||||||
|
S1 |
R |
||||||||||||||
|
I1 |
|||||||||||||||
Рисунок 91 – Трехразрядный ЦАП с резисторами веса
Поскольку прямой вход ОУ подключен к общему проводу, то потенциал инверс-
ного входа также будет нулевым. Тогда:
I1 = Uоп/R
I2 = Uоп/2R
I3 = Uоп/4R
А поскольку во вход ОУ ток не течет, то через резистор R в цепи обратной связи ОУ потечет суммарный ток, который при всех замкнутых ключах будет равен:
I = —Uвых/R = -(I1 + I2 + I3)

Знак минус означает инверсию на выходе, поскольку усилитель на ОУ инверти-
рующий. В результате, с учетом того, что любой из ключей может быть как вклю-
чен, так и выключен, имеем:
Uвых/R = —(S1·Uоп/R + S2·Uоп/2R + S3·Uоп/4R)
Uвых = -(S1·Uоп + S2·Uоп/2 + S3·Uоп/4)
где S1, S2 и S3 соответственно 0 или 1 в зависимости от состояния соответствую-
щего ключа. S3 – младший значащий разряд, S1 – старший. Цифры (S1 S2 S3)
изменяясь от всех нулей до всех единиц приведут к следующему результату на выходе:
|
S1 |
S2 |
S3 |
-Uвых |
|
0 |
0 |
0 |
0 |
|
0 |
0 |
1 |
Uоп /4 |
|
0 |
1 |
0 |
Uоп 2/4 |
|
0 |
1 |
1 |
Uоп 3/4 |
И т.д.
При данных номиналах «вес» единицы младшего разряда составляет Uоп /4
и чем больше входное число, тем больше таких единичных «ступенек» суммиру-
ется для получения выходного напряжения.
При высокой разрядности сопротивления резисторов должны быть согласо-
ваны с высокой точностью. Особо жесткие требования предъявляются к резисто-
рам старших разрядов, поскольку разброс тока в них не должен превышать тока младшего разряда. Разброс сопротивления в n-м разряде должен быть меньше,
чем:

Помимо этого, сопротивления резисторов старших разрядов могут быть со-
измеримы с сопротивлением замкнутого ключа, а это приведет к погрешностям преобразования.
В результате ЦАП такой конструкции применяется в ограниченном количе-
стве случаев в основном при небольшой разрядности.
11.4 ЦАП с матрицей R-2R
Одним из самых распространенных способов преобразования цифрового сигнала в напряжение является использование резисторной матрицы R-2R:
|
Uоп |
R |
U2 |
R |
U1 |
|||||||||||
|
2R |
2R |
2R |
2R |
R 2R |
|||||||||||||||||||||||||||
|
I3 |
I2 |
||||||||||||||||||||||||||||||
|
I1 |
R |
||||||||||||||||||||||||||||||
|
I |
|||||||||||||||||||||||||||||||
|
S3 |
S2 |
S1 |
Uвых |
||||||||||||||||||||||||||||
Рисунок 92 – ЦАП с матрицей R-2R
ЦАП с матрицей R-2R лишен главного недостатка предыдущего ЦАП: мат-
рица содержит резисторы лишь двух сопротивлений. Рассмотрим принцип ее дей-
ствия. Ключи S1-S3 переключают резисторы 2R между прямым и инверсным вхо-
дами ОУ. Прямой вход имеет потенциал нуля, а согласно золотому правилу ОУ и инверсный вход также имеет потенциал нуля. Следовательно, вне зависимости от

состояния ключей ток через резисторы (I1-I3) будет неизменным. Два правых ре-
зистора номиналом 2R, по сути, соединены параллельно, поскольку их верхние выводы соединены, а нижние выводы имеют одинаковый потенциал нуля. Следо-
вательно их общее сопротивление будет равно R (пунктирный прямоугольник).
Эти два резистора соединены последовательно с резистором R (расположен гори-
зонтально) и создают общий резистор номиналом 2R (внешний пунктирный пря-
моугольник), а также образуют делитель напряжения из последовательно соеди-
ненных резисторов одинакового номинала. Делитель напряжения с соотноше-
нием «один к одному» означает, что напряжение U1 в точке деления составляет половину от входного напряжения делителя U2. Рассуждая аналогично с другими фрагментами матрицы R-2R можно заключить, что напряжение U2 составляет по-
ловину от входного напряжения делителя Uоп. Следовательно ток I1 составляет половину от I2, ток I2 составляет половину от I3. При увеличении количества раз-
рядов данное соотношение будет сохраняться. Токи I1-I3 в зависимости от состо-
яния ключей либо «уходят в землю» (переключены налево на общий провод),
либо составляют добавку в суммарный ток I (переключены направо на инверс-
ный вход ОУ). Тогда выходное напряжение с учетом инверсии выходного напря-
жения ОУ будет складываться из:
|
ВЫХ = − оп ( 1 |
1 |
+ 2 |
1 |
+ 3 |
1 |
) |
|
|
2 |
4 |
8 |
|||||
где S1, S2 и S3 соответственно 0 или 1 в зависимости от состояния соответствую-
щего ключа.
Из этого анализа можно сделать ряд важный выводов. Во-первых, разряд-
ность схемы можно увеличивать, теоретически, до бесконечности. Во-вторых,
влияние n-го бита в выходное напряжение всей схемы равно влиянию всех ее младших битов.
Описанная схема реализации ЦАП широко используется в электронной промышленности. Готовые цифроаналоговые преобразователи выпускаются в

виде интегральных схем на число разрядов от 8 до 16. Самостоятельно построить на дискретных элементах ЦАП с разрядностью, превышающей 10 бит, крайне за-
труднительно. Количество градаций выходного напряжения для такого ЦАП уже составляет 1024, т.е. точность резисторов, из которых собрана резисторная мат-
рица, должна превышать 1/1024 < 0.1%, иначе разброс сопротивлений для стар-
шего бита сведет на нет точность, обеспечиваемую младшим.

Неделя 12
12.1 Следящий АЦП
Этот преобразователь является типичным примером последовательных АЦП и состоит из компаратора, счетчика и ЦАП.
ЦАП
UЦАП
Рисунок 93 – Структурная схема следящего АЦП
На один вход компаратора поступает входной сигнал, а на другой — сигнал с выхода ЦАП UЦАП. Счетчик тактируется от генератора тактовых импульсов (на рисунке не показан) и выдает непрерывно меняющийся цифровой код. Этот код подается на цифро-аналоговый преобразователь, на выходе которого формиру-
ется напряжение, пропорциональное цифровому коду. Выходное напряжение ЦАП сравнивается компаратором с входным напряжением UВХ. Если входное напряжение больше, чем напряжение с выхода ЦАП, то на выходе компаратора
будет лог. 1, которая подается на вход счетчика /, управляющего направле-
нием счета (1 – увеличение, 0 – уменьшение). Лог. 1 означает увеличение числа на следующем такте, что и произойдет – напряжение на выходе ЦАП увеличится на одну «ступеньку». Так будет продолжаться до тех пор, пока напряжение на выходе ЦАП не превысит входное. Как только это произойдет на каждом такте будет либо увеличение напряжения ЦАП выше входного, либо его уменьшение.
U
UВХ
UЦАП
t
Рисунок 94 – Сигналы следящего АЦП
Время преобразования АЦП этого типа является переменным и опреде-
ляется входным напряжением (что является основным его недостатком). Его мак-
симальное значение соответствует максимальному входному напряжению и при разрядности двоичного счетчика N и частоте тактовых импульсов fтакт равно
tпр.макс=(2N-1)/ fтакт.
Например, при N=10 и fтакт=1 МГц tпр.макс=1024 мкс. При нулевом напряжение для получения результата будет достаточно всего одного такта.
Достоинством АЦП данного класса является сравнительная простота по-
строения, определяемая последовательным характером выполнения процесса преобразования.
Соседние файлы в папке Схемота
- #
- #
- #
- #
- #
- #
- #
- #
Аналого-цифровой преобразователь (АЦП) – аналого-цифровой узел (устройство), выполняющее преобразование входного аналогового сигнала в цифровой.
АЦП являются устройствами, принимающими входные непрерывные сигналы от аналоговых устройств и выдающими на выходе соответствующие им цифровые сигналы, пригодные для работы с ЭВМ и другими цифровыми устройствами.
АЦП широко применяются в различных областях, являясь неотъемлемой составной частью цифровых измерительных приборов, систем и устройств обработки и отображения информации, автоматических систем контроля и управления, устройств ввода-вывода информации ЭВМ и т.д.
Характеристика преобразования (ХП) АЦП – зависимость между значениями входного аналогового сигнала (напряжения) и выходного кода.
Преобразование обеспечивает соответствие дискретного отсчета х(ti) значению кода Nti. Количественная связь для любого момента времени ti определяется соотношением
 , (3.8)
, (3.8)
где dNti – погрешность преобразования на данном шаге.
Физически процесс аналого-цифрового преобразования состоит из квантования и кодирования.
Округление – этап квантования аналогового сигнала в АЦП, при котором осуществляется переход к ближайшему уровню квантования.
Усечение – этап квантования аналогового сигнала в АЦП, при котором осуществляется переход к ближайшему меньшему уровню квантования.
Процесс квантования аналогового значения приводит к возникновению ошибки квантования, максимальное значение которой при округлении равно половине единицы младшего разряда (ЕМР) преобразователя ±1/2 · Dx, а при усечении равно Dx.
Среднее значение ошибки АЦП при округлении равно 0, а при усечении – Dx/2. Дисперсия (средняя мощность) шумов квантования при равномерном распределении плотности вероятности равна
 . (3.9)
. (3.9)
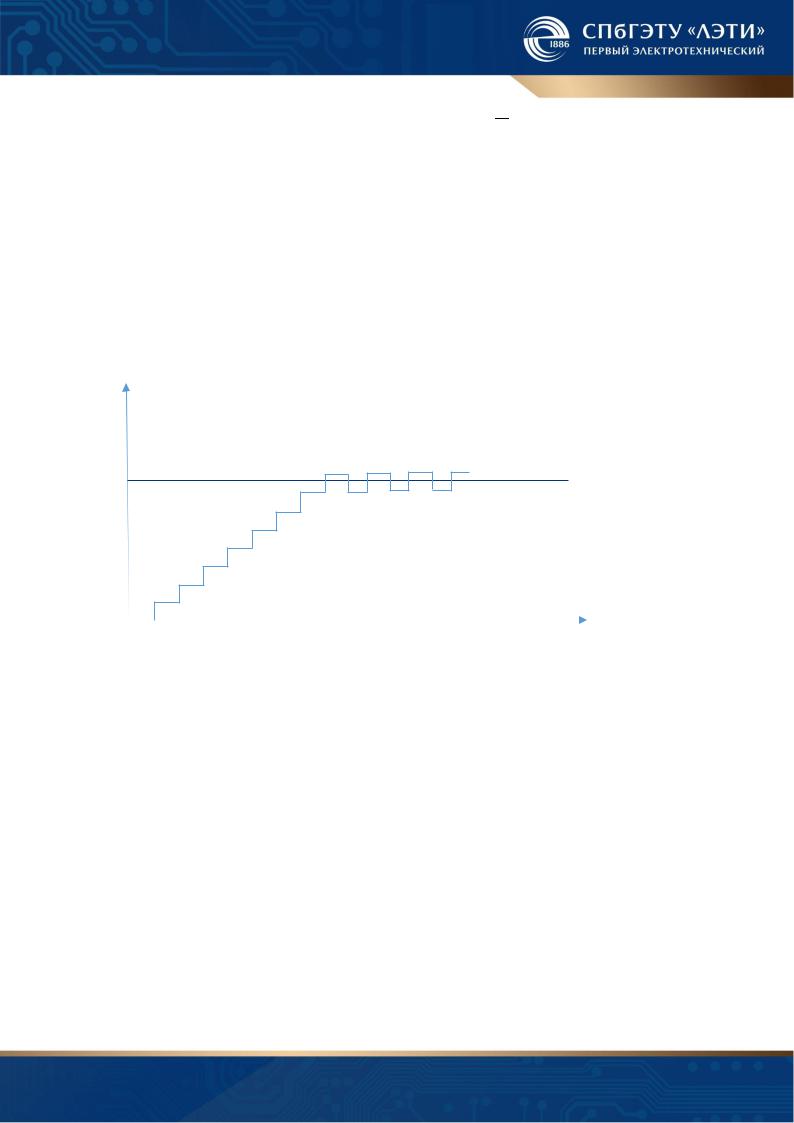
На рис. 3.4, а приведена характеристика преобразования, а на рис. 3.4, б – график ошибки квантования трехразрядного АЦП для нормированного входного сигнала.

Рис. 3.4. Характеристика квантования и график ошибок квантования
Инструментальная погрешность АЦП обусловлена несовершенством отдельных элементов схемы и влиянием на них различных дестабилизирующих факторов. Инструментальная погрешность приводит к тому, что характеристики квантования реальных АЦП отличаются от идеальной, приведенной на рис. 3.4, а. При большой разрядности АЦП точную (нелинейную) модель ошибок заменяют линейной (статистической). Если середины ступеней идеальной ломаной линии характеристики квантования соединить, то получится прямая с единичным наклоном, выходящая из начала координат (на рисунке – штриховая линия).
Линейная модель АЦП – математическая модель АЦП, применяемая при аддитивном шуме квантования.
В реальных АЦП эта прямая не проходит через нуль (погрешность смещения нуля) и ее наклон отличается от единичного (погрешность коэффициента передачи).
Погрешности смещения нуля АЦП – статические погрешности, вызванные смещением выходного кода на величину, пропорциональную погрешности.
Погрешность коэффициента передачи в диапазоне преобразования сигнала вызывает постоянное относительное отклонение выходного значения от истинного, а погрешность смещения нуля обусловливает постоянную абсолютную погрешность. Кроме того, в реальных характеристиках имеет место отклонение усредненной характеристики квантования от идеальной прямой во всем диапазоне изменения входного сигнала (погрешность нелинейности).
Нелинейность АЦП – отклонение действительного значения входного напряжения, соответствующего заданной точке ХП, от значения, определяемого по линеаризованной ХП в той же точке.
С точки зрения статической точности работы, исчерпывающей характеристикой АЦП является его реальная характеристика квантования.
Статические погрешности АЦП – погрешности, вызванные технологией изготовления аппаратуры, влиянием дестабилизирующих факторов окружающей среды, старением элементов, погрешности за счет собственных и наводимых шумов.
Рассмотренные статические погрешности характеризуют работу преобразователей при постоянных или квазипостоянных (постоянных на интервале преобразования) сигналах.
При преобразовании сигналов, изменяющихся во времени, возникают динамические погрешности, которые характеризуют, во-первых, ранее рассмотренными параметрами – периодом (частотой) квантования, временем преобразования, во-вторых, – апертурной погрешностью.
Динамические погрешности АЦП – погрешности, связанные с процессом квантования сигнала по времени, влиянием паразитных емкостей в электронных схемах и т.д.
Погрешность, возникающая из-за несоответствия входного сигнала преобразованному цифровому значению, называется апертурной погрешностью АЦП. Несоответствие возникает, если входной сигнал в течение времени преобразования изменяется более чем на единицу младшего разряда. Таким образом, при изменяющемся во времени входном сигнале создается неопределенность в том, каким в действительности было мгновенное значение входного сигнала в момент выборки.
Время между моментом фиксации мгновенного значения входного сигнала (моментом отсчета) и моментом получения его цифрового эквивалента называется апертурным временем.
Апертурная погрешность определяется приращением входного, переменного во времени сигнала АЦП за время преобразования. Точное значение апертурной погрешности можно определить, разложив выражение для входного сигнала uвх(t) в ряд Тейлора около точек отсчета, которое для i-й точки имеет вид

В первом приближении апертурная погрешность может быть представлена в следующем виде:
 (3.10)
(3.10)
где ta – апертурное время, которое для рассматриваемого случая равно времени преобразования
tпр АЦП.
Предположим для более простого восприятия, что входной сигнал имеет синусоидальную форму
uвх(t) = umsin2pft.
Для такого сигнала максимальное относительное значение апертурной погрешности будет таким:
Dua/um=2pfta.
Если принять, что для n-разрядного АЦП (с разрешающей способностью 2-n) апертурная погрешность не должна превышать значения шага квантования (рис. 3.5), то между частотой сигнала f, апертурным временем ta и относительной апертурной погрешностью имеет место соотношение
 .
.

Рис. 3.5. Апертурная погрешность
Для уменьшения динамической (апертурной) погрешности АЦП обычно используются устройства выборки и хранения (УВХ), включаемые между входом АЦП и выходом источника аналогового сигнала. Их работа основана на принципе фиксации мгновенного значения изменяющегося во времени входного сигнала uвх(t) на время, необходимое для последующего преобразования в АЦП. УВХ имеет два устойчивых режима работы: выборки и хранения.
В режиме выборки (слежения) выходной сигнал УВХ с максимально возможной скоростью достигает значения преобразуемого сигнала uвх(t) и затем отслеживает его до тех пор, пока не придет команда на хранение. С этого момента УВХ будет хранить (запоминать) на выходе мгновенное значение преобразуемого входного сигнала. Так как УВХ запоминает входной сигнал АЦП в момент времени, точно определяемый командой хранения, апертурное время (и погрешность) АЦП существенно снижается и определяется, в основном, апертурным временем УВХ – максимальным временем от момента подачи команды на хранение до момента начала перехода схемы в данный режим. Апертурное время обусловлено конечным временем переключения ключа, входящего в состав УВХ, при переходе схемы от выборки к хранению.
В УВХ входят: ОУ, выполняющие роль буферов между входом АЦП и запоминающим элементом; ключи, обеспечивающие переход схемы из режима хранения, и наоборот; схемы управления ключами; аналоговые запоминающие элементы (конденсаторы). В качестве примера можно указать ИМС УВХ, выпускаемые серийно, типа КР1100СК2.