Ошибка слежения — это ситуация, когда наблюдатель или инструмент для мониторинга не может точно отслеживать объект или процесс. Это может произойти по разным причинам, включая ограничения оборудования, некорректные параметры настройки, плохую видимость объекта или неправильную калибровку инструмента.
Ошибки слежения могут возникать в различных областях, включая аэрокосмическую, автомобильную, робототехнику, медицину и даже в нашей повседневной жизни. Например, ошибки слежения могут возникать при использовании системы навигации в автомобиле или при слежении за движущимися объектами на видеозаписи.
Исправление ошибок слежения может быть сложным и требовать тщательного анализа ситуации. Оно может включать в себя коррекцию настроек инструмента, улучшение рабочих условий, использование дополнительных датчиков или алгоритмов компенсации ошибок.
Ошибки слежения могут приводить к серьезным последствиям, включая потерю объектов, неправильные измерения или ошибочные действия системы. Поэтому важно уделять достаточно внимания настройке и исправлению ошибок слежения, чтобы обеспечить надежность и точность работы системы.
Содержание
- Остановка слежения: как восстановить пропавший сигнал?
- Ошибка слежения: что это такое и как ее избежать?
- Как исправить ошибку слежения при отслеживании объекта?
- Способы исправления ошибки слежения на мобильном устройстве
- Советы по восстановлению сигнала слежения на автомобиле
Остановка слежения: как восстановить пропавший сигнал?
В процессе использования системы слежения GPS может возникнуть ситуация, когда слежение неожиданно прерывается и сигнал пропадает. В такой ситуации необходимо принять ряд мер для восстановления связи и возобновления слежения.
Первым шагом при пропаже сигнала нужно проверить техническое состояние устройства слежения. Убедитесь, что оно включено и имеет достаточное зарядное устройство или батарею. Также проверьте, есть ли повреждения или поломки во внешней части устройства.
Если устройство слежения исправно, перейдите к проверке соединения с сетью. Возможно, пропажу сигнала вызвало временное отсутствие интернет-соединения. Убедитесь, что интернет работает, и проверьте подключение к сети устройства слежения.
Если причина пропажи сигнала не связана с устройством или интернет-соединением, возможно, проблема сигнала GPS вызвана местоположением. Устройство слежения может потерять сигнал в туннелях, подземных парковках или других закрытых помещениях. Попробуйте переместиться в открытое пространство и проверить, восстановился ли сигнал.
Если все вышеперечисленные действия не помогли восстановить сигнал слежения, обратитесь в службу технической поддержки. Опишите проблему подробно и предоставьте всю необходимую информацию. Специалисты службы технической поддержки смогут помочь вам восстановить слежение и решить проблему.
В заключение, важно помнить, что пропажа сигнала слежения — это нормальное явление, которое может быть вызвано различными причинами. Необходимо провести проверку устройства, соединения и местоположения, а также обратиться за помощью к специалистам, если ошибка продолжает возникать. Следуя этим рекомендациям, вы сможете восстановить слежение и продолжить отслеживание объекта без проблем.
Ошибка слежения: что это такое и как ее избежать?
Ошибка слежения – это ситуация, когда веб-аналитическая система не может отследить действия пользователя на сайте или не может правильно связать эти действия с определенным пользователем. Это может привести к неправильным данным и искаженной аналитике.
Ошибки слежения могут возникать по разным причинам:
- Неправильная установка кода аналитики: Если код аналитики был установлен неправильно на сайт, это может привести к ошибкам слежения. Например, если код был вставлен на страницу с ошибками или отсутствует на некоторых страницах.
- Блокировка скриптов аналитики: Некоторые пользователи могут блокировать скрипты аналитики, используя различные плагины или настройки в своем браузере. Это может привести к неполному или отсутствующему отслеживанию.
- Технические проблемы: Это может быть связано с проблемами на стороне аналитической системы или с самим сервером сайта. Например, сетевые проблемы, превышение лимита запросов, ошибка в базе данных и т.д.
Чтобы избежать ошибок слежения, важно следовать рекомендациям и лучшим практикам:
- Правильно установить код аналитики: Убедитесь, что код аналитики правильно вставлен на все страницы вашего сайта и что нет ошибок в коде. Проверьте наличие кода на всех страницах с помощью инструментов разработчика браузера.
- Проверить блокировку скриптов: Проверьте, не блокируются ли скрипты аналитики в настройках вашего браузера или с помощью плагина для блокировки рекламы. Если они блокируются, уведомите пользователей о необходимости разрешить выполнение скриптов аналитики на вашем сайте.
- Обновлять аналитическую систему: Регулярно обновляйте аналитическую систему до последней версии, чтобы быть уверенным, что исправлены все известные ошибки и нет проблем совместимости с новыми версиями браузеров.
- Мониторить ошибки и проблемы: При возникновении ошибок слежения, внимательно анализируйте их и принимайте меры для их исправления. Не игнорируйте предупреждения и ошибки в логах аналитической системы.
- Делать регулярные проверки: Регулярно проверяйте отчеты и данные аналитической системы, чтобы выявить любые отклонения или аномалии. Если данные кажутся неправдоподобными, ищите и исправляйте причину.
Избежать ошибок слежения не всегда возможно, но с помощью правильных настроек и осторожности можно значительно снизить их влияние на аналитику и получить более точные данные для принятия решений.
Как исправить ошибку слежения при отслеживании объекта?
Ошибка слежения — это ситуация, когда программное обеспечение или устройство не может правильно отслеживать движение объекта. Это может произойти по разным причинам, включая проблемы с настройками, аппаратными дефектами или неправильным использованием технологии.
Чтобы исправить ошибку слежения при отслеживании объекта, рекомендуется выполнить следующие шаги:
- Проверьте настройки: Убедитесь, что все настройки программного обеспечения или устройства, отвечающие за отслеживание, настроены правильно. Это может включать в себя настройки чувствительности, разрешения или области обзора.
- Убедитесь в полном заряде батареи: Если устройству требуется батарея, убедитесь, что она полностью заряжена. Недостаток заряда может привести к проблемам с отслеживанием.
- Очистите датчики и объективы: Проверьте, нет ли пыли, грязи или повреждений на датчиках и объективах устройства. Даже небольшие загрязнения могут повлиять на точность отслеживания.
- Проверьте системные требования: Убедитесь, что ваше устройство или программное обеспечение соответствует системным требованиям отслеживания. Если они не соответствуют, может быть необходимо обновить оборудование или программное обеспечение.
- Используйте стабильные условия: Обеспечьте стабильные условия вокруг объекта, который вы хотите отследить. Излишняя яркость, тени или другие помехи могут влиять на точность отслеживания.
Если после выполнения этих шагов проблема все еще не решена, рекомендуется обратиться к профессионалам или службе поддержки. Они могут предоставить более подробные указания или рекомендации в зависимости от конкретной ситуации.
Важно понимать, что ошибки слежения могут возникать по разным причинам, и решение может быть уникальным для каждой ситуации. Тем не менее, выполнение вышеуказанных шагов может помочь в решении большинства проблем отслеживания объектов.
Способы исправления ошибки слежения на мобильном устройстве
Ошибка слежения на мобильном устройстве может возникнуть по разным причинам, таким как неправильная настройка GPS, отключение служб геолокации на устройстве или нестабильное интернет-соединение. Но не волнуйтесь, есть несколько способов, которые помогут вам исправить эту ошибку.
- Проверьте настройки геолокации на вашем устройстве. Убедитесь, что GPS и местоположение включены. Вы можете найти эти настройки в меню «Настройки» или «Параметры» на вашем устройстве.
- Перезагрузите устройство и запустите приложение заново. Иногда простая перезагрузка может помочь устранить временные сбои, которые приводят к ошибке слежения.
- Убедитесь, что у вашего устройства стабильное интернет-соединение. Ошибка слежения может возникать из-за проблем с интернетом. Проверьте соединение Wi-Fi или включите мобильные данные.
- Проверьте наличие обновлений для вашего приложения слежения. Разработчики приложений часто выпускают обновления, в которых исправляют ошибки и улучшают функциональность. Обновление приложения может помочь исправить ошибку слежения.
- Если ничего из вышеперечисленного не помогло, попробуйте удалить приложение слежения и установить его заново. Иногда повторная установка приложения может исправить проблемы, связанные с ошибкой слежения.
Если ни один из этих способов не помог вам исправить ошибку слежения на мобильном устройстве, вам может потребоваться обратиться к специалистам технической поддержки или связаться с разработчиками приложения для получения дополнительной помощи и поддержки.
Искренне надеемся, что эти способы помогут вам исправить ошибку слежения на вашем мобильном устройстве и продолжить пользоваться приложением без каких-либо проблем.
Советы по восстановлению сигнала слежения на автомобиле
Сигнал слежения на автомобиле может быть потерян по разным причинам, таким как неисправность оборудования, проблемы с сигналом GPS или GSM-связью, а также преграды для сигнала, такие как здания или густая растительность. В данном разделе мы рассмотрим несколько советов, которые помогут вам восстановить сигнал слежения на вашем автомобиле.
- Проверьте оборудование: Убедитесь, что слежение на автомобиле включено и работает корректно. Проверьте подключение антенны и кабельной линии, а также убедитесь в наличии достаточного уровня заряда батареи устройства слежения.
- Перезагрузите устройство: Попробуйте перезагрузить устройство слежения, выключив его на несколько минут, а затем снова включив. Иногда это может помочь восстановить сигнал, если возникли временные проблемы.
- Проверьте местоположение автомобиля: Если автомобиль находится рядом с преградами для сигнала, переместите его в открытое пространство, чтобы улучшить прием сигнала GPS или GSM.
- Проверьте настройки устройства: Убедитесь, что устройство слежения настроено на правильное время и временную зону. Эти параметры могут оказывать влияние на работу устройства и его способность поддерживать соединение с сетью.
- Свяжитесь с провайдером услуг: Если вы выполнили все вышеперечисленные действия, но сигнал все еще не восстанавливается, свяжитесь с вашим провайдером услуг для слежения. Они смогут проверить состояние вашего оборудования и предоставить более подробную помощь по восстановлению сигнала.
Помните, что восстановление сигнала слежения может быть сложным, и иногда потребуется помощь профессионалов. Если вы не уверены в своих навыках, лучше обратиться к специалисту, чтобы избежать дополнительных проблем и повреждений оборудования.
Важно помнить, что сигнал слежения может быть временно или постоянно потерян из-за различных факторов. Однако, с помощью вышеперечисленных советов и подходом «шаг за шагом», вы сможете увеличить свои шансы на успешное восстановление сигнала слежения на вашем автомобиле.
Ошибка слежения — это расстройство, которое возникает при использовании трекинговых устройств, таких как компьютерные мыши, сенсорные панели или трекпады. При слежении устройство должно точно отслеживать движения пользователя, но иногда оно может допускать ошибки, что в свою очередь приводит к неправильному перемещению указателя на экране.
Ошибки слежения могут возникать по разным причинам. Одной из основных причин является плохое качество трекингового устройства или его повреждение. Неровная поверхность, по которой перемещается мышь или трекпад, также может вызывать ошибки слежения. Кроме того, проблемы с программным обеспечением или драйверами устройства могут снизить точность и надежность слежения.
Исправление ошибок слежения может быть достаточно простым. Во-первых, рекомендуется проверить состояние трекингового устройства и, если необходимо, заменить его на новое или более качественное. Также стоит обратить внимание на поверхность, по которой перемещается устройство — она должна быть ровной и гладкой, чтобы минимизировать возможность ошибок.
Важно учесть, что некачественное или поврежденное программное обеспечение может быть источником проблем с слежением. Периодически обновляйте драйверы устройств и убедитесь, что у вас установлена последняя версия программного обеспечения. В случае необходимости, свяжитесь с производителем устройства или обратитесь к специалисту, чтобы получить профессиональную помощь по исправлению ошибок слежения.
В целом, ошибка слежения может быть достаточно раздражающей проблемой, которая мешает эффективной работе или использованию компьютера. Однако, с некоторыми базовыми рекомендациями и правильными действиями, можно минимизировать и исправить эту проблему, обеспечив более точное и комфортное слежение на трекинговых устройствах.
Содержание
- Что такое ошибка слежения?
- Описание и сущность
- Причины возникновения ошибки слежения
- Технические проблемы
- Внешние факторы
- Как исправить ошибку слежения?
- Обновление программного обеспечения
- Проверка настройки слежения
- Использование дополнительных инструментов
Что такое ошибка слежения?
Ошибка слежения, или tracking error, в инвестиционном контексте означает разницу между доходностью инвестиционного портфеля и доходностью базового индекса, по которому этот портфель пытается отследить. Если инвестиционный портфель является пассивным фондом, который стремится повторять индекс, то его целью является минимизация ошибки слежения.
Ошибка слежения возникает из-за различий в структуре портфеля и его доли активов по сравнению с базовым индексом. Одной из причин ошибки слежения может быть неполнота индекса. Например, если индекс включает акции только определенных компаний, в то время как портфель содержит акции других компаний, то возникнет ошибка слежения.
Другой причиной ошибки слежения может быть различие в весе активов в портфеле по сравнению с индексом. Если, например, в портфеле акции одной компании имеют большую долю, чем в индексе, то это может привести к отклонению в доходности и, следовательно, к ошибке слежения.
Ошибки слежения могут также возникать из-за транзакционных издержек, связанных с покупкой и продажей активов. Комиссии брокера, спреды и другие издержки могут снижать доходность портфеля и вызывать ошибку слежения.
Для инвестора ошибка слежения может быть важным показателем эффективности инвестиционного портфеля. Ошибка слежения может указать на то, насколько точно инвестиционный портфель повторяет базовый индекс. Чем ниже ошибка слежения, тем более точно портфель слежит за индексом.
Описание и сущность
Ошибка слежения (также известная как tracking error) является показателем расхождения доходности инвестиционного фонда от доходности его базового актива или индекса, по которому он пытается слежить.
Сущность ошибки слежения заключается в том, что даже если инвестиционный фонд стремится максимально точно повторять доходность базового актива или индекса, его результаты всегда будут немного отличаться от ожидаемых. Это может быть связано с различными факторами, такими как комиссии и расходы на управление фондом, пропуски в ребалансировке портфеля, ошибки в выборе активов и прочее.
Ошибка слежения может быть положительной или отрицательной. Положительная ошибка слежения означает, что инвестиционный фонд показывает лучшие результаты, чем базовый актив или индекс. Например, если фонд имеет доходность на 2% выше, чем доходность базового актива, то ошибка слежения положительная на 2%. Отрицательная ошибка слежения, наоборот, означает, что фонд имеет худшие результаты.
Для инвесторов ошибки слежения могут стать важным фактором при выборе фонда для инвестирования. Более высокая ошибка слежения может говорить о менее эффективном управлении фондом или наличии дополнительных рисков, связанных с инвестированием в этот фонд. Важно также учитывать, что ошибки слежения могут быть временными и их значение может меняться со временем, поэтому необходимо быть внимательным при анализе результатов фонда.
Причины возникновения ошибки слежения
Ошибки слежения – это неправильное определение движения или позиции объекта компьютерной программой или устройством виртуальной или дополненной реальности. Ошибки слежения могут возникать по разным причинам:
- Низкое качество сенсоров или камер, используемых для слежения. Недостаточно точные или чувствительные сенсоры могут приводить к неточностям при слежении.
- Плохое освещение. Слабое освещение может затруднять распознавание объектов и их движение.
- Затенение или перекрытие объектов. Если объект частично или полностью скрыт от камер или сенсоров, программа или устройство не сможет правильно определить его положение и движение.
- Большое количество объектов. Если в поле зрения камеры или сенсоров находится слишком много объектов, программа может запутаться и неправильно их идентифицировать.
- Ошибки алгоритмов слежения. Некорректно спроектированные или плохо написанные алгоритмы слежения могут привести к ошибкам в определении позиции и движения объекта.
- Движение слишком быстрого объекта. Если объект движется слишком быстро, камеры и сенсоры могут не успевать его точно слежение. Это особенно важно в случае использования виртуальной или дополненной реальности в быстрых играх.
Все эти причины могут приводить к ошибкам слежения и снижать качество работы программ и устройств виртуальной или дополненной реальности. Однако, с помощью правильного подбора сенсоров, улучшения алгоритмов и обеспечения хороших условий освещения и видимости объектов, можно минимизировать возникновение ошибок слежения и обеспечить более точное и стабильное определение движения и позиции объектов.
Технические проблемы
Ошибки слежения могут возникать по разным причинам, включая технические проблемы. Вот несколько распространенных технических факторов, которые могут привести к ошибкам слежения:
- Проблемы с кодом отслеживания: Иногда ошибка слежения может быть вызвана неправильно установленным кодом отслеживания на веб-странице. Это может быть вызвано опечатками при вставке кода или несоответствием версии кода с использованной платформой аналитики.
- Сбои в сети: Проблемы со связью или сетью могут вызывать ошибки слежения, поскольку данные аналитики не могут быть переданы на сервер аналитики. Это может произойти, например, при временных перебоях в сети или при неправильной конфигурации маршрутизатора.
- Проблемы совместимости: Некоторые сторонние плагины или скрипты, которые используются на веб-странице, могут быть несовместимы с кодом отслеживания. Это может вызывать конфликты и приводить к ошибкам слежения.
- Неправильная конфигурация: Неправильная настройка платформы аналитики или неправильные настройки счетчика могут вызывать ошибки слежения. Это может происходить, например, при неправильной установке параметров отслеживания событий или при неправильной настройке фильтров данных.
В случае возникновения ошибок слежения, рекомендуется проверить все технические аспекты, связанные с отслеживанием, а также обратиться к документации и поддержке платформы аналитики, чтобы устранить возможные технические проблемы.
Внешние факторы
Ошибка слежения, которую может испытывать человек, обусловлена различными внешними факторами. Рассмотрим некоторые из них:
- Освещение: Плохое освещение может вызывать ошибку слежения, поскольку глазам трудно сфокусироваться на движущемся объекте. Яркий свет или слишком темноватая комната могут существенно затруднить задачу слежения.
- Дистанция: Расстояние между наблюдателем и объектом также влияет на качество слежения. Если объект слишком далеко или слишком близко, то это может вызвать ошибку слежения. Оптимальная дистанция позволяет глазу легко фокусироваться на объекте.
- Движение объекта: Быстрое или непредсказуемое движение объекта может стать причиной ошибки слежения. Если объект перемещается слишком быстро, наблюдатель может затрудниться в его отслеживании.
- Фон: Подходящий фон также имеет значение при слежении за объектом. Если фон слишком яркий или сложный, то глазу труднее сконцентрироваться на движущемся объекте и возможна ошибка слежения.
Кроме того, стоит учитывать индивидуальные особенности каждого человека, такие как зрение, концентрация внимания, координация движений и другие факторы, которые также могут влиять на ошибку слежения.
Как исправить ошибку слежения?
Ошибка слежения — распространенная проблема, с которой могут столкнуться владельцы автомобилей, оснащенных системой навигации и слежения. Эта ошибка может возникать по разным причинам, но ее можно исправить самостоятельно, не прибегая к помощи сервисного центра.
Чтобы исправить ошибку слежения, рекомендуется выполнить следующие действия:
-
Перезапустите систему: В большинстве случаев простой перезапуск системы слежения позволяет устранить ошибку. Для этого выключите автомобиль, подождите несколько минут и снова запустите его. Если ошибка сохраняется, переходите к следующему шагу.
-
Проверьте соединения: Убедитесь, что все соединения в системе слежения надежно закреплены и не имеют видимых повреждений. Если вы обнаружили слабое соединение или повреждение проводов, необходимо произвести их замену или ремонт.
-
Обновите программное обеспечение: Проверьте, что у вас установлена последняя версия программного обеспечения системы слежения. Если нет, скачайте ее с официального сайта производителя и установите на свое устройство. Обновление программного обеспечения может устранить ошибки и улучшить функциональность системы.
-
Обратитесь в сервисный центр: Если после выполнения вышеуказанных шагов ошибка слежения не исчезла, рекомендуется обратиться в сервисный центр, специализирующийся на ремонте систем слежения. Квалифицированные специалисты смогут выявить и устранить проблему, а также произвести диагностику всей системы.
Следуя указанным выше шагам, вы сможете исправить ошибку слежения и восстановить работоспособность вашей системы навигации и слежения. Важно помнить, что в ряде случаев проблему можно решить самостоятельно, но иногда потребуется обратиться за помощью к специалистам.
Обновление программного обеспечения
Одной из основных причин ошибки слежения является устаревшее программное обеспечение. Когда устройства и программы работают на старых версиях, они могут не обладать необходимыми функциями и исправлениями, которые могут повлиять на точность работы слежения. Поэтому регулярное обновление программного обеспечения является важным шагом для предотвращения ошибок слежения.
Причины ошибок слежения, связанные с устаревшим программным обеспечением:
- Ошибки в программном коде. Старые версии программного обеспечения могут содержать ошибки в коде, которые могут привести к неправильной работе слежения.
- Отсутствие необходимых исправлений. Новые версии программного обеспечения часто содержат исправления ошибок и улучшения, которые могут повысить точность и эффективность слежения.
- Неактуальные калибровочные данные. Обновления программного обеспечения могут содержать новые калибровочные данные, которые улучшают точность слежения.
Способы обновления программного обеспечения:
- Автоматические обновления. Многие программные продукты предлагают возможность автоматического обновления. В этом случае программное обеспечение само проверяет наличие новых версий и устанавливает их при необходимости.
- Ручные обновления. В некоторых случаях требуется скачать новую версию программного обеспечения с официального сайта или другого источника и установить ее вручную.
- Мониторинг обновлений. Важно следить за регулярными обновлениями программного обеспечения, которые могут включать исправления ошибок и улучшения работы слежения.
Обновление программного обеспечения — это необходимый шаг для поддержания высокой точности и эффективности слежения. Регулярное обновление помогает предотвратить ошибки слежения, связанные с устаревшими версиями программного обеспечения, и обеспечивает работу слежения на самом актуальном уровне.
Проверка настройки слежения
Если вы столкнулись с ошибками слежения на своем сайте, перед тем как приниматься за их исправление, рекомендуется выполнить следующие шаги для проверки настройки слежения:
- Убедитесь, что у вас установлен и активирован код слежения на каждой странице вашего сайта. Для этого можно вручную проверить наличие кода Google Analytics (или другой аналитической системы, которую вы используете) на каждой странице сайта. Обычно этот код размещается внутри тега <head> или сразу после открывающего тега <body>. Если код отсутствует на какой-либо странице, то пользователь, посещающий эту страницу, не будет отслеживаться, и это может привести к ошибкам в данных слежения.
- Проверьте, что код слежения корректно сконфигурирован. Проверьте наличие правильного идентификатора отслеживания (UA-ID) в коде слежения, так как неправильный идентификатор может привести к ошибкам. Также убедитесь, что код слежения не содержит опечаток или других ошибок синтаксиса. Если у вас есть доступ к настройкам слежения в аналитической системе, проверьте, что настройки слежения установлены правильно и отслеживают необходимые данные.
- Проверьте наличие ошибок в консоли разработчика. При использовании Google Tag Manager или других инструментов для установки кода слежения, в консоли разработчика может отображаться информация о возможных ошибках при загрузке и выполнении кода. При обнаружении ошибок рекомендуется их исправить, что может устранить проблемы со слежением.
- Проверьте, что настройки слежения соответствуют вашим требованиям. Некоторые ошибки слежения могут быть связаны с неправильными настройками фильтров, целей, воронок и других параметров в аналитической системе. Проверьте, что все эти настройки корректно сконфигурированы и отслеживают необходимые данные. Если вы видите неправильные данные в отчетах аналитики, проверьте, что эти данные не исключены фильтрами или другими настройками.
Выполнение данных шагов может помочь выявить проблему с настройкой слежения и принять меры по ее исправлению. Если же проблема сохраняется после выполнения этих шагов, рекомендуется обратиться за помощью к специалистам в настройке и анализе слежения.
Использование дополнительных инструментов
Ошибка слежения — это проблема, которая может возникнуть при использовании различных видов трекеров для отслеживания движения объектов или лиц на видеозаписях.
Если стандартные методы исправления ошибки слежения не дали результатов, можно попробовать использовать дополнительные инструменты. Некоторые из них включают в себя:
- Фильтры и алгоритмы обработки изображений — это программы, которые позволяют улучшить качество и точность слежения. Они могут быть настроены для определенных условий окружающей среды и помогут устранить шум или искажения на видеозаписях.
- Техника многошагового слежения — это метод, который разделяет задачу слежения на несколько этапов и применяет различные алгоритмы к каждому из них. Например, это может включать отслеживание области интереса (ROI), выявление и отслеживание объектов внутри ROI и т.д.
Помимо этого, существуют специализированные программы и инструменты, разработанные для работы с ошибками слежения, такие как:
- TrackMate — это плагин для программы ImageJ, который предоставляет мощные инструменты для слежения объектов на изображении. Он имеет широкий спектр функций, включая автоматическое отслеживание, фильтры для удаления шума и искажений, а также возможность визуализации результатов.
- OpenCV — это библиотека компьютерного зрения с открытым исходным кодом, которая предоставляет множество алгоритмов и инструментов для работы с изображениями. Она широко используется в различных сферах, включая отслеживание объектов на видео.
Использование дополнительных инструментов может быть полезным для устранения ошибок слежения и повышения точности и качества результата. Однако, важно помнить, что выбор инструментов и методов должен основываться на специфических требованиях задачи, а также доступности необходимых навыков и ресурсов.
ЛАБОРАТОРНАЯ
РАБОТА № 7
АНАЛИЗ ТОЧНОСТИ
СИСТЕМ УПРАВЛЕНИЯ
Цель работы.
Исследование
точностных свойств систем управления.
Методические
рекомендации.
До начала работы студенты должны получить
от преподавателя вариант задания. К
занятию допускаются студенты, получившие
аналитическое выражение для установившейся
ошибки из п.4.3 (см. порядок выполнения
работы). Лабораторная работа рассчитана
на 2 часа.
Теоретические
сведения.
Точность работы любой системы управления
наиболее полно характеризуется мгновенным
значением ошибки слежения, равной
разности между требуемым и действительным
значениями регулируемой переменной
![]() .
.
Однако в большинстве задач управления
реальными объектами задающие и возмущающие
воздействия заранее точно неизвестны
и, следовательно, определить заранее
величину
![]()
для всех моментов времени не представляется
возможным. Поэтому точностные свойства
системы, как правило, оцениваются при
типовых входных воздействиях —
постоянном, линейно или квадратично
нарастающем. Для характеристики
точностных свойств системы управления
используется понятие установившейся
ошибки слежения, а
также предельного
значения установившейся ошибки слежения.
Установившаяся ошибка
![]()
представляет собой функцию времени,
удовлетворяющую условию
![]() (7.1)
(7.1)
для
любых начальных условий
![]()
и заданного входного воздействия
![]() .
.
Другими словами, она характеризует
ошибку слежения, установившуюся после
завершения переходного процесса.
Предельное значение установившейся
ошибки
![]()
определяется выражением
![]() (7.2)
(7.2)
(при
условии, что предел (7.2) существует).
Величина предельного
значения установившейся ошибки при
типовом задающем воздействии может
быть достаточно просто рассчитана по
передаточной функции системы. Пусть
образы Лапласа ошибки слежения
![]()
и сигнала задания
![]() связаны
связаны
соотношением
![]() , (7.3)
, (7.3)
где
![]()
— известная передаточная
функция замкнутой системы по ошибке
слежения (относительно
задающего воздействия).
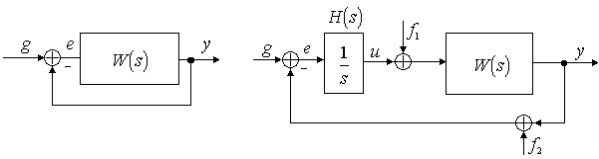
Например, для систем с единичной
отрицательной обратной связью (см.
рис.7.1) имеем
![]() ,
,
где
![]()
— передаточная
функция разомкнутой системы,
включающая в себя передаточные функции
регулятора и объекта управления. Тогда,
в соответствии с теоремой о предельном
переходе во временной области (см. [3]),
имеем


![]() .
.
Образы Лапласа
типовых задающих воздействий приведены
в таблице 7.1.
Для приближенной
оценки установившейся ошибки слежения
![]()
при произвольном (но достаточно гладком)
входном воздействии
![]()
можно воспользоваться следующей
методикой. Разложим
![]()
в ряд Тейлора в окрестности точки
![]()
![]() , (7.4)
, (7.4)
где
![]() ,
,
![]() .
.
Тогда, подставляя (7.4) в (7.3) и переходя
во временную область, получаем выражение
установившейся ошибки при произвольном
входном воздействии
![]() , (7.5)
, (7.5)
где
постоянные
![]()
носят название коэффициентов
ошибок. Если
![]() изменяется
изменяется
дос-
Таблица 7.1
Образы Лапласа
типовых задающих воздействий
|
Типовое воздействие |
Постоянное
|
Линейно возрастающее
|
Квадратично возрастающее
|
|
Образ Лапласа
|
|
|
|
таточно медленно,
то для приближенной оценки
![]()
можно использовать конечное число
членов ряда (7.5).

Замечание.
Так как
![]()
является дробно-рациональной функцией,
то коэффициенты ошибок можно получить
делением числителя
![]()
на знаменатель и сравнением получающегося
ряда с выражением (7.4).
В качестве
универсальной характеристики точностных
свойств систем управления используется
понятие порядка
астатизма
(по отношению к входному воздействию).
Система называется статической
(или — с
нулевым
порядком астатизма),
если в выражении (7.5)
![]() .
.
Говорят, что система имеет k-й
порядок астатизма,
если в выражении (7.5)
![]()
для всех
![]()
![]() и
и
![]() .
.
Для систем с
единичной отрицательной обратной связью
(см. рис. 7.1) порядок астатизма может быть
достаточно просто определен на основе
анализа структурных свойств системы.
Так, система на рис.7.1 является статической
(т.е. с нулевым
порядком астатизма),
если
![]() ,
,
где
![]()
— общий
коэффициент усиления разомкнутой
системы. Для
статической системы при постоянном
входном воздействии
![]()
имеем
![]() .
.
Последнее
выражение означает, что постоянное
входное воздействие отрабатывается с
ненулевой установившейся ошибкой (с
так называемой, статической
ошибкой).
При линейно нарастающем входном
воздействии
![]()
имеем
![]() ,
,
откуда
следует, что линейно возрастающее
задающее воздействие отрабатывается
статической системой с неограниченно
растущей ошибкой.
Система на рис.7.1
является астатической,
если
![]()
и
передаточная функция разомкнутой
системы
![]()
может быть представлена в виде
![]() ,
,
где
![]()
— передаточная функция статической
системы (т.е.
![]() ).
).
При этом число
![]()
соответствует порядку астатизма.
Для системы с
первым порядком астатизма при постоянном
входном воздействии
![]()
имеем
Таблица 7.2
Соответствие
порядка астатизма предельному значению
установившейся
ошибки слежения
|
Порядок астатизма |
Постоянное
|
Линейно возрастающее
|
Квадратично возрастающее
|
|
0 |
|
|
|
|
1 |
0 |
|
|
|
2 |
0 |
0 |
|
 ,
,
а
при линейно нарастающем воздействии
![]()
![]() .
.
Таблица 7.2
демонстрирует соответствие между
порядком астатизма и предельным значением
установившейся ошибки слежения.
Аналогичным образом
может быть введено понятие порядка
астатизма по возмущающему воздействию.
Особо отметим, что порядок астатизма
по задающему воздействию, в общем случае,
не соответствует порядку астатизма по
возмущению. В качестве примера рассмотрим
задачу стабилизации (![]() )
)
системы, представленной на рис.7.2, где
![]()
— передаточная функция регулятора,
![]()
— передаточная функция объекта управления
(![]() ),
),
![]()
— возмущение по управлению,
![]()
— ошибка измерительного устройства,
рассматриваемая в качестве возмущения
по выходу. Очевидно, что замкнутая
система по задающему воздействию
обладает порядком астатизма, равным
единице.
На основе анализа
структурной схемы системы можно записать
![]()
или
![]() .
.
После элементарных
преобразований окончательно получаем
 .
.

Пусть возмущения![]()
и
![]()
являются постоянными. Тогда
![]() .
.
Таким образом,
возмущение
![]()
дает статическую ошибку (величина
которой не зависит от параметров системы
управления), а влияние возмущения
![]()
полностью компенсировано. В общем
случае, факт наличия или отсутствия
установившейся ошибки должен быть
определен для каждого действующего на
систему возмущения на основе анализа
соответствующих передаточных функций
от возмущения к ошибке, вне зависимости
от порядка астатизма системы по задающему
воздействию.
Порядок выполнения
работы.

-
Исследование
системы с астатизмом нулевого порядка.
Структура системы представлена на
рис.7.3, где
 .
.
Варианты передаточной функции объекта
управления
 ,
,
а также характеристики задающего
воздействия

приведены в табл.7.3.
1.1. Исследование
стационарного режима работы:
![]() .
.
Получить переходные процессы для трех
различных значений коэффициента
![]()
и определить предельное значение
установившейся ошибки
![]() .
.
Значения коэффициента
![]()
(здесь и во всех последующих пунктах):
1, 5, 10.
1.2. Исследование
режима движения с постоянной скоростью:
![]() .
.
Получить переходные процессы для
различных значений коэффициента
![]() .
.
Интервал наблюдения — 30 секунд.
-
Исследование
системы с астатизмом первого порядка.
Структура системы представлена на
рис.7.3, где
 .
.
Варианты передаточной функции объекта
управления
,
а также характеристики квадратично
нарастающего задающего воздействия

приведены в табл.7.4. Характеристики
постоянного и линейно нарастающего
задающих воздействий взять из табл.7.3.
2.1. Исследование
стационарного режима работы:
![]() .
.
Получить переходные процессы для
различных значений коэффициента
![]()
и определить предельное значение
установившейся ошибки
![]() .
.
2.2. Исследование
режима движения с постоянной скоростью:
![]() .
.
Получить переходные процессы для
различных значений коэффициента
![]()
и определить предельное значение
установившейся ошибки
![]() .
.
Интервал наблюдения — 30 секунд.
2.3. Исследование
режима движения с постоянным ускорением:
![]() .
.
Получить переходные процессы для
различных значений коэффициента
![]() .
.
Интервал наблюдения — 30 секунд.


-
Исследование
влияния внешних возмущений.
3.1. В соответствии
с вариантом задания (см. табл.7.5 и рис.7.4)
собрать схему моделирования возмущенной
системы.
При
этом вид передаточной функции
![]()
взять из табл.7.3.
3.2. Полагая
![]()
и
![]() ,
,
получить переходной процесс и определить
предельное значение установившейся
ошибки
![]() .
.
3.3. Полагая
![]()
и
![]() ,
,
получить переходной процесс и определить
предельное значение установившейся
ошибки
![]() .
.
-
Исследование
установившейся ошибки при произвольном
входном воздействии.
Структура системы представлена на
рис.7.3,
где
.
Варианты передаточной функции
взять
из табл.7.3, а вид задающего воздействия
из табл. 7.6.
4.1. Получить
переходной процесс в замкнутой системе
и определить (по графику) установившуюся
ошибку слежения
![]() .
.
4.2. Получить
приближенное аналитическое выражение
для
![]() ,
,
сохранив в ряде Тейлора (7.5) три первых
члена. Построить график
![]()
в соответствии с полученным аналитическим
выражением (использовать для этого блок
нелинейных функций Fnc).
Содержание
отчета.
1. Структурные
схемы моделируемых систем и графики
переходных процессов.
2. Графики
экспериментально полученных зависимостей
предельных значений установившейся
ошибки
![]()
от коэффициента
![]()
(пункты 1.1, 2.1 и 2.2 порядка выполнения
работы). Аналитическое подтверждение
полученных результатов.
3. Аналитический
расчет установившихся ошибок в возмущенной
системе.
-
Аналитический
расчет и графики расчетной и
экспериментально определенной
установившейся ошибки слежения при
произвольном входном воздействии (см.
пункт 4.3 порядка выполнения работы). -
Выводы.
Вопросы к защите
лабораторной работы.
1. Можно
ли использовать конечное число членов
ряда (7.5) для приближенной оценки
установившейся ошибки слежения за
задающим воздействием вида
![]()
2. Пусть
![]()
— общий коэффициент усиления разомкнутой
системы с нулевым порядком астатизма.
Чему равен коэффициент
![]()
в формуле (7.5)?
3. Можно
ли компенсировать ошибку измерительного
устройства
![]()
(см. рис.7.2), повысив порядок астатизма
системы по задающему воздействию?
4. Определить
предельное значение установившейся
ошибки в системе, представленной на
рис.7.2, если
![]() ,
,
![]()
а
![]() .
.
Таблица 7.3
Варианты параметров
систем с нулевым порядком астатизма
|
Вариант |
|
|
|
Вариант |
|
|
|
|
1 |
|
1 |
0,5t |
7 |
|
1 |
1,5t |
|
2 |
|
2 |
2t |
8 |
|
1 |
2t |
|
3 |
|
2 |
4t |
9 |
|
2 |
2t |
|
4 |
|
1 |
t |
10 |
|
2 |
t |
|
5 |
|
2 |
2t |
11 |
|
2 |
2t |
|
6 |
|
1 |
t |
12 |
|
4 |
2t |
Таблица 7.4
Варианты параметров
систем с первым порядком астатизма
|
Вариант |
|
|
Вариант |
|
|
|
1 |
|
|
7 |
|
|
|
2 |
|
|
8 |
|
|
|
3 |
|
|
9 |
|
|
|
4 |
|
|
10 |
|
|
|
5 |
|
|
11 |
|
|
|
6 |
|
|
12 |
|
|
Соседние файлы в папке Metoda
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Любой индексный фонд должен четко следовать за своим индексом. Чем выше точность слежения, тем лучше фонд справляется со своей главной задачей. Владелец качественных индексных инструментов может быть уверен, что на любом горизонте инвестирования в своем портфеле он получит точное отражение рыночных (индексных) бенчмарков. Оценить качество работы фонда как раз и позволяет «ошибка слежения», или Tracking Error. Рассказываем, что обозначает этот показатель и как он рассчитывается.

Зачем нужно смотреть на ошибку слежения
Ошибка слежения (tracking error)— это приведенное к годовым значение отклонений дневных доходностей ETF от индекса-бенчмарка. По сути, ошибка слежения отражает, насколько точно фонд ежедневно отслеживает индекс и как быстро и эффективно происходит перебалансировка портфеля ETF при изменении состава индекса. Другими словами, ошибка слежения — это мера того, насколько надпись на упаковке (название ETF) соответствует ее содержанию (наполнению).
Чем меньше ошибка слежения, тем более полно ETF отображает динамику индекса, а значит, и доходность фонда будет максимально приближена к индексу. Важно помнить, что ETF — это инструмент доступа к рынку акций, облигаций или товаров, и он не должен обыгрывать индекс или демонстрировать лучшие, чем у индекса, характеристики «риск — доходность». Но он должен обеспечивать доход, близкий к бенчмарку.
Высокая ошибка слежения фактически указывает на риск недополучения инвестором дохода из-за низкого качества управления фондом.
Как рассчитывается ошибка слежения
На странице каждого фонда FinEx ETF публикуется информация по ошибке слежения. Давайте посмотрим, как же рассчитывается этот показатель, если вы хотите повторить вычисления самостоятельно или просто желаете увидеть все изнутри.
1. Выгружаем дневную, то есть за каждый торговый день, динамику стоимости чистых активов фонда на 1 акцию (СЧА) и цены отслеживаемого индекса за рассматриваемый период (всё в одной валюте — в базовой валюте фонда).
Для самостоятельного расчета ошибки слежения необходимо иметь данные по динамике стоимости чистых активов на одну акцию фонда и динамике индекса за максимально возможный период (с момента создания фонда). СЧА на одну акцию каждого FinEx ETF обновляется ежедневно на продуктовых страницах, ее можно выгрузить в формате Excel за любой период.

С выгрузкой «индексных» данных, к сожалению, всё сложнее. Дело в том, что многие индекс-провайдеры публикуют динамику своих индексов только в Bloomberg или Reuters, доступа к которым у большинства розничных инвесторов нет. У FinEx ETF такой доступ есть, но размещать эти данные мы, к сожалению, не можем — это нарушение авторских прав.
 Примечание: данные приведены в качестве примера и не относятся к конкретному фонду
Примечание: данные приведены в качестве примера и не относятся к конкретному фонду
2. Считаем дневные доходности за каждый торговый день по СЧА фонда и по отслеживаемому индексу.
Следующий шаг — расчет дневных доходностей фонда и индекса по выгруженным данным. Для этого используется стандартная формула прироста:
доходность за день = (значение СЧА на сегодняшний день) / (значение СЧА на вчерашний день) — 1
 Примечание: данные приведены в качестве примера и не относятся к конкретному фонду
Примечание: данные приведены в качестве примера и не относятся к конкретному фонду
3. Считаем разницу дневной доходности фонда и индекса.
Разницу дневной доходности СЧА фонда и цен индекса (или Daily Return Difference) посчитать просто: нужно из дневной доходности фонда вычесть дневную доходность индекса. У нас должен получиться ряд данных на каждый торговый день.
 Примечание: данные приведены в качестве примера и не относятся к конкретному фонду
Примечание: данные приведены в качестве примера и не относятся к конкретному фонду
4. Проверяем получившиеся разницы на наличие «выбросов».
В процессе анализа могут возникнуть отклонения, которые не связаны с качеством отслеживания. К примеру, если СЧА фонда не обновлялся несколько дней (такое может происходить, если торги по фонду не велись из-за локальных праздников), а значения по индексу рассчитывались. Чтобы эти «выбросы» не привели к искусственному завышению ошибки слежения, необходимо удалить лишние строки.
 Примечание: данные приведены в качестве примера и не относятся к конкретному фонду
Примечание: данные приведены в качестве примера и не относятся к конкретному фонду
5. Считаем ошибку слежения с помощью формулы
Чтобы рассчитать финальный показатель, нам достаточно простой статистической функции Excel. Используем функцию поиска стандартного отклонения выборки СТАНДОТКЛОН.В (в нашем случае «выборка» — это ряд данных с разницей дневных доходностей) и приведем получившееся значение к годовым терминам. Для этого его нужно умножить на корень из количества торговых дней — 252. Так мы получим заветный показатель.
 Примечание: данные приведены в качестве примера и не относятся к конкретному фонду
Примечание: данные приведены в качестве примера и не относятся к конкретному фонду
Можно ли рассчитать показатель быстрее
В примере выше мы использовали самый точный метод расчета ошибки слежения — на основе дневных данных. Именно таким способом рассчитываются ошибки слежения всех FinEx ETF. Эти данные можно найти на странице каждого ETF.

Однако на практике инвестор может использовать и более грубый способ расчета с помощью годовых данных.
Предположим, что существует ETF, который отслеживает определенный индекс. Результаты работы фонда и индекса за последние 5 лет можно определить всего лишь по десяти точечным данным СЧА и индекса. При этом методика расчета остается абсолютно идентичной, за исключением последнего шага — полученный показатель не нужно приводить к годовым значениям, так как за основу уже взяты годовые данные.

Примечание: данные приведены в качестве примера и не относятся к конкретному фонду
Посмотреть файл Excel со всеми расчетами и формулами из статьи можно по ссылке.
Понравился текст? Вот короткая инструкция, как получать еще больше полезных материалов:
- Чтобы не пропустить новые статьи, подписывайтесь на нашу рассылку.
- Если вы только решили стать инвестором, то читайте наш гайд «С чего начать», где вы найдете ответы на все вопросы, и подписывайтесь на лайфхаки для новичков на канале в телеграме.
- Смотрите обучающие ролики на нашем YouTube-канале.
- А чтобы еще лучше разбираться в инвестициях, подписывайтесь на наш аналитический канал.
В настоящее время в различных научно-технических областях имеется широкий класс задач, в которых информация о состоянии объекта (координаты в пространстве, скорость перемещения, изменение формы и т. д.) регистрируется теплопеленгатором (ТП), принцип работы которого основан на обработке инфракрасного излучения от объекта. ТП располагается на подвижном основании с системой стабилизации, удерживающей это основание с некоторой точностью. Движущийся объект отслеживается и удерживается в поле зрения ТП. Предлагаемая система состоит из ТП и засвечивающего объект лазера, закрепленного на ТП. Точность регистрации координат движущегося объекта зависит от точности системы слежения ТП и наведения лазерного луча, которая определяется точностью наложения светового пятна лазерного излучения на движущийся объект.
Облучение объекта лазерным лучом происходит с частотой, во много раз превышающей частоту сканирования поля зрения ТП, поэтому ошибки и требования к ошибкам можно определить следующим образом:
- ошибка слежения не должна превышать половину поля зрения ТП;
- ошибка, обусловленная уходом оси ТП за интервал сканирования из-за возмущающих воздействий, не должна превышать величин, равных половине угла раствора диаграммы направленности лазера.
Цель предлагаемой работы — оценка точности наведения лазерного луча на объект и разработка системы определения координат (целеуказания) и наведения на объект лазерного пучка с заданной точностью.
Задача рассматривается на примере построения возможного варианта системы целеуказания, в котором движущийся объект сопровождается лазерным лучом в поле зрения теплопеленгатора [1].
Как отмечалось выше, ТП расположен на подвижном стабилизируемом основании, а лазер, подсвечивающий объект, закреплен на ТП. При такой конструкции наведение лазерного луча на объект может рассматриваться как процесс перемещения поступающего со следящего ТП лазерного пучка в пространстве по целеуказанию.
Для оценки точности наведения лазерного луча необходимо:
- определить ошибки совмещения пучка лазерного излучения с объектом при наихудшей возможной тактической ситуации перемещения объекта относительно ТП и засвечивающего лазера;
- рассчитать ошибки системы слежения ТП;
- оценить ошибки, возникающие при определении ТП координат объекта с учетом точности системы стабилизации.
Наихудшая тактическая ситуация возникает на предельных дальностях слежения, когда движущийся объект имеет точечные размеры.
Для осуществления пеленгации необходимо, чтобы точечный объект попал в раствор диаграммы направленности лазерного излучения, т. е. вероятность захвата объекта лазерным пучком должна быть близка к 1. В этом случае ось лазерного пучка, облучающего объект, не должна отклоняться от центра отслеживаемого объекта больше, чем на угол α (рис. 1).

Рис. 1
Для оценки ошибок используется среднеквадратичное отклонение оси пучка от координаты объекта.
Считая, что пространственные ошибки наложения лазерного луча описываются нормальным (гауссовским) законом распределения, получим:

Рассчитаем ошибку θmax системы слежения ТП. Известно [2], что динамическая ошибка θmax импульсной системы слежения с астатизмом первого порядка определяется из выражения:

где T — интервал квантования по времени импульсной системы, который в рассматриваемом случае является периодом сканирования линейкой фотоприемников поля зрения ТП; Ωmax — условная максимальная скорость изменения задающего воздействия, которая является максимальной угловой скоростью движения объекта относительно ТП; ε — величина перерегулирования в системе слежения.
Значение Ωmax рассчитаем, используя тактическую ситуацию перемещения объекта относительно ТП, которая иллюстрируется на рис. 2, где П — пролет; D0 — начальное расстояние от объекта до ТП; Dk — конечная дистанция между объектом и ТП; O1 — начальное положение объекта; O2 — конечное положение объекта; R — расстояние от объекта до ТП; V0 — вектор скорости объекта; V0n, V0τ — нормальная и тангенциальная составляющие скорости V0; α — угол визирования объекта, α1 — угол между направлениями скоростей V0 и V0τ .

Рис. 2
При больших R можно считать, что α1 = α.
Угловая скорость ω0 движения объекта относительно ТП определяется из выражения:

Для определения ошибок, возникающих из-за конечной точности удержания подвижного основания системой стабилизации, зададимся видом возмущающего воздействия и численными значениями величин (параметров) этого воздействия. Подвижное основание, на котором устанавливается ТП с лазером, подвергается механическому воздействию, направленному по осям x, y, z в виде поворотов этого основания вокруг указанных осей.
Аналитические выражения возмущающего воздействия, например вокруг оси х, могут быть записаны в виде: х(t) = хmax×sin(2πƒt). Значения величин хmax и ƒ известны.
При ослаблении возмущающего воздействия системой стабилизации в К раз значение амплитуды xп(t) колебаний подвижного основания определяется из выражения:

Максимальный сдвиг φε max подвижного основания за время Т, равное периоду сканирования (интервалу дискретизации) ТП, рассчитывается по формуле:

где ωП max — максимальная угловая скорость движения подвижного основания на интервале дискретизации Т.
Величину ωП max можно определить, учитывая, что текущая угловая скорость подвижного основания ωП(t) рассчитывается по формуле:

Отсюда следует, что ωП max = (2πƒ)xП max.
Тогда величина что φε max = (2πƒ)xП max.
Суммарная ошибка θε max в измерении координат объекта теплопеленгатором определяется по формуле:
![]()
Если расчетная величина ошибки значительно превысит требуемую, равную σα, то для более точного наведения луча лазера на объект необходимо ввести в систему определения координат объекта ТП дополнительную информацию о движении объекта относительно ТП на интервале дискретизации Т.
Указанную информацию можно получить, установив на корпусе ТП датчики угловой скорости (ДУС). Структурная схема системы, обеспечивающая определение координат объекта в одной плоскости для наведения на него лазерного луча, изображена на рис. 3, где введены следующие обозначения:
- Xо, Xт п — координаты цели и ТП (соответственно);
- Xт п — угловая скорость движения оси ТП;
- Xт п — угловая скорость движения оси ТП, измеренная ДУС;
- ΔXт п — приращение координаты движения оси ТП на интервале квантования Т;
- Xп — угловая скорость движения подвижного основания (платформа), на котором установлен ТП;
- Му, Мт — управляющий момент и момент трения соответственно;
- К — ключ, замыкающийся с периодом дискретизации Т;
- Wэ(р) — передаточная функция экстраполятора;
- Wk(p) — передаточная функция корректирующего звена;
- Кум, Кмд — коэффициенты передачи усилителя мощности и моментального датчика соответственно;
- J — момент инерции ТП, вращающегося вокруг оси x.

Рис. 3
После ДУС в структурной схеме помещен интегратор, обнуляемый в моменты времени t = nT, кратные периоду сканирования Т.
Координата Хλ для наведения лазерного луча на объект вычисляется по формуле:
![]()
Такой вариант вычисления координаты позволяет минимизировать ошибку при ее определении, так как:
- разностная координата Xо — Xт п, определяющая положение движущегося объекта в координатных осях ТП, определяется после экстраполятора, что позволяет учитывать движение объекта в пределах интервала дискретизации Т;
- поправка ΔXтп к разностной координате Xо — Xт п, вычисляемая как интеграл от оценки скорости движения оси ТП в пределах интервала дискретизации, позволяет учитывать движение оси ТП, обусловленное как экстраполированным движением объекта, так и возмущающим воздействием на подвижное основание.
В качестве примера определим численные значения требуемой ошибки ?? и получаемых ошибок наведения лазерного луча при заданных значениях:
![]()
Ошибка системы слежения ТП
![]()
при наихудшей тактической ситуации:

при ε = 0,2; T = 0,1 с величина
![]()
Определим ошибки, возникающие при определении координат объекта из-за конечной точности системы стабилизации при Xmax = 20°, ƒ = 0,4 Гц, K = 100:

Тогда суммарная ошибка в измерении координаты цели:
>
![]()
Таким образом, вычисленная суммарная ошибка оказалась меньше половины зрения ТП.
Ошибка φmax, вычисленная без учета поправки ΔXтп, оказалась значительно больше требуемой ошибки σα.
Введение поправки к координате объекта, вычисленной как оценка к уходу оси ТП на интервале дискретизации, позволит определить координату объекта с ошибкой, определяемой ошибками ДУС.
При ошибках ДУС порядка 20 угл. с/с ошибка в вычислении поправки на интервале дискретизации T = 0,1 c составит 2 угл. с, что значительно меньше требуемой ошибки σα.
На основании вышеизложенного можно сделать вывод о возможности построения системы определения координат движущихся объектов с лазерным сопровождением, удовлетворяющей требованиям по точности.
Литература
- Якушенков Ю. Г. Теория и расчет оптико-электронных приборов. М.: Машиностроение. 1989.
- Бесенерский В. А. Цифровые системы автоматического управления. М.: Наука. 1975.