
The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of error should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.
Overview[edit]
| Source | Effect (m) |
|---|---|
| Signal arrival C/A | ±3 |
| Signal arrival P(Y) | ±0.3 |
| Ionospheric effects | ±5 |
| Ephemeris errors | ±2.5 |
| Satellite clock errors | ±2 |
| Multipath distortion | ±1 |
| Tropospheric effects | ±0.5 |
 C/A C/A
|
±6.7 |
| P(Y)
|
±6.0 |


User equivalent range errors (UERE) are shown in the table. There is also a numerical error with an estimated value,  , of about 1 meter (3 ft 3 in). The standard deviations,
, of about 1 meter (3 ft 3 in). The standard deviations,  , for the coarse/acquisition (C/A) and precise codes are also shown in the table. These standard deviations are computed by taking the square root of the sum of the squares of the individual components (i.e., RSS for root sum squares). To get the standard deviation of receiver position estimate, these range errors must be multiplied by the appropriate dilution of precision terms and then RSS’ed with the numerical error. Electronics errors are one of several accuracy-degrading effects outlined in the table above. When taken together, autonomous civilian GPS horizontal position fixes are typically accurate to about 15 meters (50 ft). These effects also reduce the more precise P(Y) code’s accuracy. However, the advancement of technology means that in the present, civilian GPS fixes under a clear view of the sky are on average accurate to about 5 meters (16 ft) horizontally.
, for the coarse/acquisition (C/A) and precise codes are also shown in the table. These standard deviations are computed by taking the square root of the sum of the squares of the individual components (i.e., RSS for root sum squares). To get the standard deviation of receiver position estimate, these range errors must be multiplied by the appropriate dilution of precision terms and then RSS’ed with the numerical error. Electronics errors are one of several accuracy-degrading effects outlined in the table above. When taken together, autonomous civilian GPS horizontal position fixes are typically accurate to about 15 meters (50 ft). These effects also reduce the more precise P(Y) code’s accuracy. However, the advancement of technology means that in the present, civilian GPS fixes under a clear view of the sky are on average accurate to about 5 meters (16 ft) horizontally.
The term user equivalent range error (UERE) refers to the error of a component in the distance from receiver to a satellite. These UERE errors are given as ± errors thereby implying that they are unbiased or zero mean errors. These UERE errors are therefore used in computing standard deviations. The standard deviation of the error in receiver position,
 , is computed by multiplying PDOP (Position Dilution Of Precision) by
, is computed by multiplying PDOP (Position Dilution Of Precision) by
, the standard deviation of the user equivalent range errors.
is computed by taking the square root of the sum of the squares of the individual component standard deviations.
PDOP is computed as a function of receiver and satellite positions. A detailed description of how to calculate PDOP is given in the section Geometric dilution of precision computation (GDOP).
for the C/A code is given by:

The standard deviation of the error in estimated receiver position , again for the C/A code is given by:

The error diagram on the left shows the inter relationship of indicated receiver position, true receiver position, and the intersection of the four sphere surfaces.
Signal arrival time measurement[edit]
The position calculated by a GPS receiver requires the current time, the position of the satellite and the measured delay of the received signal. The position accuracy is primarily dependent on the satellite position and signal delay.
To measure the delay, the receiver compares the bit sequence received from the satellite with an internally generated version. By comparing the rising and trailing edges of the bit transitions, modern electronics can measure signal offset to within about one percent of a bit pulse width,  , or approximately 10 nanoseconds for the C/A code. Since GPS signals propagate at the speed of light, this represents an error of about 3 meters.
, or approximately 10 nanoseconds for the C/A code. Since GPS signals propagate at the speed of light, this represents an error of about 3 meters.
This component of position accuracy can be improved by a factor of 10 using the higher-chiprate P(Y) signal. Assuming the same one percent of bit pulse width accuracy, the high-frequency P(Y) signal results in an accuracy of  or about 30 centimeters.
or about 30 centimeters.
Atmospheric effects[edit]
Inconsistencies of atmospheric conditions affect the speed of the GPS signals as they pass through the Earth’s atmosphere, especially the ionosphere. Correcting these errors is a significant challenge to improving GPS position accuracy. These effects are smallest when the satellite is directly overhead and become greater for satellites nearer the horizon since the path through the atmosphere is longer (see airmass). Once the receiver’s approximate location is known, a mathematical model can be used to estimate and compensate for these errors.
Ionospheric delay of a microwave signal depends on its frequency. It arises from ionized atmosphere (see Total electron content). This phenomenon is known as dispersion and can be calculated from measurements of delays for two or more frequency bands, allowing delays at other frequencies to be estimated.[1] Some military and expensive survey-grade civilian receivers calculate atmospheric dispersion from the different delays in the L1 and L2 frequencies, and apply a more precise correction. This can be done in civilian receivers without decrypting the P(Y) signal carried on L2, by tracking the carrier wave instead of the modulated code. To facilitate this on lower cost receivers, a new civilian code signal on L2, called L2C, was added to the Block IIR-M satellites, which was first launched in 2005. It allows a direct comparison of the L1 and L2 signals using the coded signal instead of the carrier wave.
The effects of the ionosphere generally change slowly, and can be averaged over time. Those for any particular geographical area can be easily calculated by comparing the GPS-measured position to a known surveyed location. This correction is also valid for other receivers in the same general location. Several systems send this information over radio or other links to allow L1-only receivers to make ionospheric corrections. The ionospheric data are transmitted via satellite in Satellite Based Augmentation Systems (SBAS) such as Wide Area Augmentation System (WAAS) (available in North America and Hawaii), EGNOS (Europe and Asia), Multi-functional Satellite Augmentation System (MSAS) (Japan), and GPS Aided Geo Augmented Navigation (GAGAN) (India) which transmits it on the GPS frequency using a special pseudo-random noise sequence (PRN), so only one receiver and antenna are required.
Humidity also causes a variable delay, resulting in errors similar to ionospheric delay, but occurring in the troposphere. This effect is more localized than ionospheric effects, changes more quickly and is not frequency dependent. These traits make precise measurement and compensation of humidity errors more difficult than ionospheric effects.[2]
The Atmospheric pressure can also change the signals reception delay, due to the dry gases present at the troposphere (78% N2, 21% O2, 0.9% Ar…). Its effect varies with local temperature and atmospheric pressure in quite a predictable manner using the laws of the ideal gases.[3]
Multipath effects[edit]
GPS signals can also be affected by multipath issues, where the radio signals reflect off surrounding terrain; buildings, canyon walls, hard ground, etc. These delayed signals cause measurement errors that are different for each type of GPS signal due to its dependency on the wavelength.[4]
A variety of techniques, most notably narrow correlator spacing, have been developed to mitigate multipath errors. For long delay multipath, the receiver itself can recognize the wayward signal and discard it. To address shorter delay multipath from the signal reflecting off the ground, specialized antennas (e.g., a choke ring antenna) may be used to reduce the signal power as received by the antenna. Short delay reflections are harder to filter out because they interfere with the true signal, causing effects almost indistinguishable from routine fluctuations in atmospheric delay.
Multipath effects are much less severe in moving vehicles. When the GPS antenna is moving, the false solutions using reflected signals quickly fail to converge and only the direct signals result in stable solutions.
Ephemeris and clock errors[edit]
While the ephemeris data is transmitted every 30 seconds, the information itself may be up to two hours old. Variability in solar radiation pressure[5] has an indirect effect on GPS accuracy due to its effect on ephemeris errors. If a fast time to first fix (TTFF) is needed, it is possible to upload a valid ephemeris to a receiver, and in addition to setting the time, a position fix can be obtained in under ten seconds. It is feasible to put such ephemeris data on the web so it can be loaded into mobile GPS devices.[6] See also Assisted GPS.
The satellites’ atomic clocks experience noise and clock drift errors. The navigation message contains corrections for these errors and estimates of the accuracy of the atomic clock. However, they are based on observations and may not indicate the clock’s current state.
These problems tend to be very small, but may add up to a few meters (tens of feet) of inaccuracy.[7]
For very precise positioning (e.g., in geodesy), these effects can be eliminated by differential GPS: the simultaneous use of two or more receivers at several survey points. In the 1990s when receivers were quite expensive, some methods of quasi-differential GPS were developed, using only one receiver but reoccupation of measuring points. At the TU Vienna the method was named qGPS and post processing software was developed.[citation needed]
Dilution of precision [edit]
Selective Availability[edit]
GPS formerly included a feature called Selective Availability (SA) that added intentional, time varying errors of up to 100 meters (328 ft) to the publicly available navigation signals. This was intended to deny an enemy the use of civilian GPS receivers for precision weapon guidance.
SA errors are actually pseudorandom, generated by a cryptographic algorithm from a classified seed key available only to authorized users (the U.S. military, its allies and a few other users, mostly government) with a special military GPS receiver. Mere possession of the receiver is insufficient; it still needs the tightly controlled daily key.
Before it was turned off on May 2, 2000, typical SA errors were about 50 m (164 ft) horizontally and about 100 m (328 ft) vertically.[8] Because SA affects every GPS receiver in a given area almost equally, a fixed station with an accurately known position can measure the SA error values and transmit them to the local GPS receivers so they may correct their position fixes. This is called Differential GPS or DGPS. DGPS also corrects for several other important sources of GPS errors, particularly ionospheric delay, so it continues to be widely used even though SA has been turned off. The ineffectiveness of SA in the face of widely available DGPS was a common argument for turning off SA, and this was finally done by order of President Clinton in 2000.[9]
DGPS services are widely available from both commercial and government sources. The latter include WAAS and the U.S. Coast Guard’s network of LF marine navigation beacons. The accuracy of the corrections depends on the distance between the user and the DGPS receiver. As the distance increases, the errors at the two sites will not correlate as well, resulting in less precise differential corrections.
During the 1990–91 Gulf War, the shortage of military GPS units caused many troops and their families to buy readily available civilian units. Selective Availability significantly impeded the U.S. military’s own battlefield use of these GPS, so the military made the decision to turn it off for the duration of the war.
In the 1990s, the FAA started pressuring the military to turn off SA permanently. This would save the FAA millions of dollars every year in maintenance of their own radio navigation systems. The amount of error added was «set to zero»[10] at midnight on May 1, 2000 following an announcement by U.S. President Bill Clinton, allowing users access to the error-free L1 signal. Per the directive, the induced error of SA was changed to add no error to the public signals (C/A code). Clinton’s executive order required SA to be set to zero by 2006; it happened in 2000 once the U.S. military developed a new system that provides the ability to deny GPS (and other navigation services) to hostile forces in a specific area of crisis without affecting the rest of the world or its own military systems.[10]
On 19 September 2007, the United States Department of Defense announced that future GPS III satellites will not be capable of implementing SA,[11] eventually making the policy permanent.[12]
Anti-spoofing[edit]
Another restriction on GPS, antispoofing, remains on. This encrypts the P-code so that it cannot be mimicked by a transmitter sending false information. Few civilian receivers have ever used the P-code, and the accuracy attainable with the public C/A code was much better than originally expected (especially with DGPS), so much so that the antispoof policy has relatively little effect on most civilian users. Turning off antispoof would primarily benefit surveyors and some scientists who need extremely precise positions for experiments such as tracking tectonic plate motion.
Relativity[edit]
The theory of relativity introduces several effects that need to be taken into account when dealing with precise time measurements. According to special relativity, time passes differently for objects in relative motion. That is known as kinetic time dilation: in an inertial reference frame, the faster an object moves, the slower its time appears to pass
(as measured by the frame’s clocks). General relativity takes into account also the effects that gravity has on the passage of time. In the context of GPS the most prominent correction introduced by general relativity is gravitational time dilation: the clocks located deeper in the gravitational potential well (i.e. closer to the attracting body) appear to tick slower.
Special relativity[edit]
Special relativity predicts that as the velocity of an object increases (in a given frame), its time slows down (as measured in that frame). For instance, the frequency of the atomic clocks moving at GPS orbital speeds will tick more slowly than stationary clocks by a factor of  where the orbital velocity is v = 4 km/s and c = the speed of light. The result is an error of about -7.2 μs/day in the satellite. The special relativistic effect is due to the constant movement of GPS clocks relative to the Earth-centered, non-rotating approximately inertial reference frame. In short, the clocks on the satellites are slowed down by the velocity of the satellite. This time dilation effect has been measured and verified using the GPS.
where the orbital velocity is v = 4 km/s and c = the speed of light. The result is an error of about -7.2 μs/day in the satellite. The special relativistic effect is due to the constant movement of GPS clocks relative to the Earth-centered, non-rotating approximately inertial reference frame. In short, the clocks on the satellites are slowed down by the velocity of the satellite. This time dilation effect has been measured and verified using the GPS.
General relativity[edit]
Special relativity allows the comparison of clocks only in a flat spacetime, which neglects gravitational effects on the passage of time. According to general relativity, the presence of gravitating bodies (like Earth) curves spacetime, which makes comparing clocks not as straightforward as in special relativity. However, one can often account for most of the discrepancy by the introduction of gravitational time dilation, the slowing down of time near gravitating bodies. In case of the GPS, the receivers are closer to Earth than the satellites, causing the clocks at the altitude of the satellite to be faster by a factor of 5×10−10, or about +45.8 μs/day. This gravitational frequency shift is measurable. During early development some believed that GPS would not be affected by general relativistic effects, but the Hafele–Keating experiment showed that it would be.
Combined kinetic and gravitational time dilations[edit]
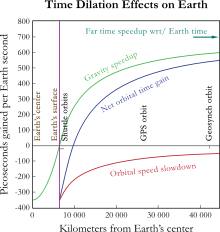
Combined, these sources of time dilation cause the clocks on the satellites to gain 38.6 microseconds per day relative to the clocks on the ground. This is a difference of 4.465 parts in 1010.[13] Without correction, errors of roughly 11.4 km/day would accumulate in the position.[14] This initial pseudorange error is corrected in the process of solving the navigation equations. In addition, the elliptical, rather than perfectly circular, satellite orbits cause the time dilation and gravitational frequency shift effects to vary with time. This eccentricity effect causes the clock rate difference between a GPS satellite and a receiver to increase or decrease depending on the altitude of the satellite.
To compensate for the discrepancy, the frequency standard on board each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[15] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.[16] Placing atomic clocks on artificial satellites to test Einstein’s general theory was proposed by Friedwardt Winterberg in 1955.[17]
Calculations[edit]
To calculate the amount of daily time dilation experienced by GPS satellites relative to Earth we need to separately determine the amounts due to the satellite’s velocity and altitude, and add them together.
Kinetic time dilation[edit]
The amount due to velocity is determined using the Lorentz transformation. The time measured by an object moving with velocity  changes by (the inverse of) the Lorentz factor:
changes by (the inverse of) the Lorentz factor:

For small values of v/c this approximates to:

The GPS satellites move at 3874 m/s relative to Earth’s center.[15] We thus determine:

This difference of 8.349×10−11 represents the fraction by which the satellites’ clocks tick slower than the stationary clocks. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks are slower than Earth’s clocks by 7214 nanoseconds a day due to their velocity.
- Note that this speed of 3874 m/s is measured relative to Earth’s center rather than its surface where the GPS receivers (and users) are. This is because Earth’s equipotential makes net time dilation equal across its geodesic surface.[18] That is, the combination of Special and General effects make the net time dilation at the equator equal to that of the poles, which in turn are at rest relative to the center. Hence we use the center as a reference point to represent the entire surface.
Gravitational time dilation[edit]
The amount of dilation due to gravity is determined using the gravitational time dilation equation:

where  is the time passed at a distance
is the time passed at a distance  from the center of the Earth and
from the center of the Earth and  is the time passed for a far away observer.
is the time passed for a far away observer.
For small values of  this approximates to:
this approximates to:

Determine the difference  between the satellite’s time
between the satellite’s time  and Earth time
and Earth time  :
:

Earth has a radius of 6,357 km (at the poles) making  = 6,357,000 m and the satellites have an altitude of 20,184 km[15] making their orbit radius
= 6,357,000 m and the satellites have an altitude of 20,184 km[15] making their orbit radius  = 26,541,000 m. Substituting these in the above equation, with Earth mass M = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:
= 26,541,000 m. Substituting these in the above equation, with Earth mass M = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:

This represents the fraction by which the clocks at satellites’ altitude tick faster than on the surface of the Earth. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks gain 45850 nanoseconds a day due to gravitational time dilation.
Combined time dilation effects[edit]
These effects are added together to give (rounded to 10 ns):
- 45850 – 7210 = 38640 ns
Hence the satellites’ clocks gain approximately 38,640 nanoseconds a day or 38.6 μs per day due to relativistic effects in total.
In order to compensate for this gain, a GPS clock’s frequency needs to be slowed by the fraction:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
This fraction is subtracted from 1 and multiplied by the pre-adjusted clock frequency of 10.23 MHz:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
That is we need to slow the clocks down from 10.23 MHz to 10.22999999543 MHz in order to negate both time dilation effects.
Sagnac distortion[edit]
GPS observation processing must also compensate for the Sagnac effect. The GPS time scale is defined in an inertial system but observations are processed in an Earth-centered, Earth-fixed (co-rotating) system. A coordinate transformation is thus applied to convert from the inertial system to the ECEF system. The resulting signal run time correction has opposite algebraic signs for satellites in the Eastern and Western celestial hemispheres. Ignoring this effect will produce an east–west error on the order of hundreds of nanoseconds, or tens of meters in position.[19]
Natural sources of interference[edit]
Since GPS signals at terrestrial receivers tend to be relatively weak, natural radio signals or scattering of the GPS signals can desensitize the receiver, making acquiring and tracking the satellite signals difficult or impossible.
Space weather degrades GPS operation in two ways, direct interference by solar radio burst noise in the same frequency band[20] or by scattering of the GPS radio signal in ionospheric irregularities referred to as scintillation.[21] Both forms of degradation follow the 11 year solar cycle and are a maximum at sunspot maximum although they can occur at any time. Solar radio bursts are associated with solar flares and coronal mass ejections (CMEs)[22] and their impact can affect reception over the half of the Earth facing the sun. Scintillation occurs most frequently at tropical latitudes where it is a night time phenomenon. It occurs less frequently at high latitudes or mid-latitudes where magnetic storms can lead to scintillation.[23] In addition to producing scintillation, magnetic storms can produce strong ionospheric gradients that degrade the accuracy of SBAS systems.[24]
Artificial sources of interference[edit]
In automotive GPS receivers, metallic features in windshields,[25] such as defrosters, or car window tinting films[26] can act as a Faraday cage, degrading reception just inside the car.
Man-made EMI (electromagnetic interference) can also disrupt or jam GPS signals. In one well-documented case it was impossible to receive GPS signals in the entire harbor of Moss Landing, California due to unintentional jamming caused by malfunctioning TV antenna preamplifiers.[27][28] Intentional jamming is also possible. Generally, stronger signals can interfere with GPS receivers when they are within radio range or line of sight. In 2002 a detailed description of how to build a short-range GPS L1 C/A jammer was published in the online magazine Phrack.[29]
The U.S. government reported that such jammers were used occasionally during the War in Afghanistan, and the U.S. military destroyed six GPS jammers during the Iraq War, including one that was destroyed with a GPS-guided bomb, noting the ineffectiveness of the jammers used in that situation.[30] A GPS jammer is relatively easy to detect and locate, making it an attractive target for anti-radiation missiles. The UK Ministry of Defence tested a jamming system in the UK’s West Country on 7 and 8 June 2007.[citation needed]
Some countries allow the use of GPS repeaters to allow the reception of GPS signals indoors and in obscured locations; while in other countries these are prohibited as the retransmitted signals can cause multi-path interference to other GPS receivers that receive data from both GPS satellites and the repeater. In the UK Ofcom now permits the use of GPS/GNSS Repeaters[31] under a ‘light licensing’ regime.
Due to the potential for both natural and man-made noise, numerous techniques continue to be developed to deal with the interference. The first is to not rely on GPS as a sole source. According to John Ruley, «IFR pilots should have a fallback plan in case of a GPS malfunction».[32] Receiver Autonomous Integrity Monitoring (RAIM) is a feature included in some receivers, designed to provide a warning to the user if jamming or another problem is detected. The U.S. military has also deployed since 2004 their Selective Availability / Anti-Spoofing Module (SAASM) in the Defense Advanced GPS Receiver (DAGR).[33] In demonstration videos the DAGR was shown to detect jamming and maintain its lock on the encrypted GPS signals during interference which caused civilian receivers to lose lock.
See also[edit]
- GPS augmentation
Notes[edit]
- ^ The same principle, and the math behind it, can be found in descriptions of pulsar timing by astronomers.
- ^ Navipedia: Troposphere Monitoring
- ^ Navipedia: Tropospheric Delay
- ^ Navipedia: Multipath
- ^ «IPN Progress Report 42-159 (2004)» (PDF).
- ^ SNT080408. «Ephemeris Server Example». Tdc.co.uk. Archived from the original on January 12, 2009. Retrieved 2009-10-13.
- ^ «Unit 1 – Introduction to GPS». Archived from the original on April 29, 2009.
- ^ Grewal (2001), p. 103.
- ^ «President Clinton Orders the Cessation of GPS Selective Availability».
- ^ a b «Statement by the President regarding the United States’ Decision to Stop Degrading Global Positioning System Accuracy». Federal Aviation Administration. May 1, 2000. Archived from the original on 2011-10-21. Retrieved 2013-01-04.
- ^ «DoD Permanently Discontinues Procurement Of Global Positioning System Selective Availability». DefenseLink. September 18, 2007. Archived from the original on February 18, 2008. Retrieved 2008-02-20.
- ^ «Selective Availability». National space-based Positioning, Navigation, and Timing Executive Committee. Archived from the original on January 13, 2008. Retrieved 2008-02-20.
- ^ Rizos, Chris. University of New South Wales. GPS Satellite Signals Archived 2010-06-12 at the Wayback Machine. 1999.
- ^ Faraoni, Valerio (2013). Special Relativity (illustrated ed.). Springer Science & Business Media. p. 54. ISBN 978-3-319-01107-3. Extract of page 54
- ^ a b c The Global Positioning System by Robert A. Nelson Via Satellite Archived 2010-07-18 at the Wayback Machine, November 1999
- ^ Pogge, Richard W. «Real-World Relativity: The GPS Navigation System». Retrieved 2008-01-25.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Archived from the original on 2014-07-03. Retrieved 2009-10-23.
- ^ S. P. Drake (January 2006). «The equivalence principle as a stepping stone from special to general relativity» (PDF). Am. J. Phys., Vol. 74, No. 1. pp. 22–25.
- ^ Ashby, Neil Relativity and GPS. Physics Today, May 2002.
- ^ Cerruti, A., P. M. Kintner, D. E. Gary, A. J. Mannucci, R. F. Meyer, P. H. Doherty, and A. J. Coster (2008), Effect of intense December 2006 solar radio bursts on GPS receivers, Space Weather, doi:10.1029/2007SW000375, October 19, 2008
- ^ Aarons, Jules; Basu, Santimay (1994). «Ionospheric amplitude and phase fluctuations at the GPS frequencies». Proceedings of ION GPS. 2: 1569–1578.
- ^ S. Mancuso and J. C. Raymond, «Coronal transients and metric type II radio bursts. I. Effects of geometry, 2004, Astronomy and Astrophysics, v.413, p.363-371′
- ^ Ledvina, B. M.; J. J. Makela & P. M. Kintner (2002). «First observations of intense GPS L1 amplitude scintillations at midlatitude». Geophysical Research Letters. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. doi:10.1029/2002GL014770. S2CID 133701419.
- ^ Tom Diehl, Solar Flares Hit the Earth- WAAS Bends but Does Not Break, SatNav News, volume 23, June 2004.
- ^ «I-PASS Mounting for Vehicles with Special Windshield Features» (PDF). Archived from the original (PDF) on March 26, 2010.
- ^ «3M Automotive Films».. Note that the ‘Color Stable’ films are specifically described as not interfering with satellite signals.
- ^ «The Hunt for RFI». GPS World. 1 January 2003.
- ^ «EMC compliance club «banana skins» column 222″. Compliance-club.com. Retrieved 2009-10-13.
- ^ Low Cost and Portable GPS Jammer. Phrack issue 0x3c (60), article 13. Published December 28, 2002.
- ^ American Forces Press Service. Centcom charts progress. March 25, 2003. Archived December 3, 2009, at the Wayback Machine
- ^ [1] Ofcom Statement on Authorisation regime for GNSS repeaters
- ^ Ruley, John. AVweb. GPS jamming. February 12, 2003.
- ^ US Army DAGR page Archived 2012-08-05 at archive.today
References[edit]
- Grewal, Mohinder S.; Weill, Lawrence Randolph; Andrews, Angus P. (2001). Global positioning systems, inertial navigation, and integration. John Wiley and Sons. ISBN 978-0-471-35032-3.
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics & Astronomy. ISBN 978-1-56347-106-3.
- Webb, Stephen (2004). Out of this world: colliding universes, branes, strings, and other wild ideas of modern physics. Springer. ISBN 0-387-02930-3. Retrieved 2013-08-16.
External links[edit]
- GPS.gov—General public education website created by the U.S. Government
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2008 version).
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2001 version).
На фоне рекордного числа санкций и прочих бед (например, отключения монетизации Ютуба для русских блогеров) россиян настигла ещё одна проблема — глюки с навигацией у смартфонов и навигаторов.
Потеря сигнала, чем она вызвана
Стало известно, что гаджеты на территории РФ начали плохо определять своё местоположение. Одни определяли его намного дольше обычного, другие давали более высокую погрешность, чем ранее. Например, если обычно на обнаружение ближайших спутников уходили считанные секунды, то теперь эта же операция занимает минуты, а иногда до получаса и дольше. Причиной этого безобразия стали санкции против России.
Сразу поясню, что в РФ не отключали GPS, она работает, просто более медленно на многих устройствах. Для полноценной геолокации по спутниковым системам устройству (смартфону или навигатору) нужно поймать сигналы минимум от 4 навигационных спутников. При этом, ваш гаджет пользуется сборниками положений спутников на ближайшие дни и недели, зная заранее их точную дислокацию. Если у вас нет интернета (на момент установления геолокации), то информация приходит только со спутников. Это называется холодным стартом, он имеет продолжительность несколько минут, иногда дольше. При подключении к интернету, связь со спутниками происходит гораздо быстрее (технология A-GPS). Максимально быстро GPS работает при наличии доступа к вышкам сотовой связи и точкам Wi-Fi доступа. Поэтому в городской черте определение местоположения обычно занимает не больше пары секунд.
GPS (полное название Global Positioning System) является системой глобального позиционирования. Через спутниковую систему навигации происходит измерение расстояния от спутника до приёмника. Используется всемирная система координат WGS 84. GPS позволяет определять местоположение гаджета в любую погоду и в любой точке планеты.
A-GPS (расшифровывается как Assisted GPS) — технология ускорения «холодного старта» GPS-приёмника, используется в смартфонах и планшетах. A-GPS многие путают с LBS. Для полноты картины рассмотрим и LBS.
Location-based service (LBS) является сервисом определения местоположения объекта через привязку к ориентирам из базы данных оператора связи. В качестве ориентиров чаще всего выступают вышки сотовой связи. В составе навигационного терминала (трекера) имеются GPS приемник и GSM модем, передающий данные на мониторинговый сервер. Обычно GSM имеет более стабильный сигнал (чем GPS со спутников), его сложнее заглушить и проще поймать, даже в условиях неисправности внешней антенны. Для определения места дислокации трекера, GSM модем регистрируется на базовой станции оператора мобильной связи. Станция в ответ передаёт свой идентификационный номер (Cell_ID) и прочие служебные параметры. Координаты большинства базовых станций известны, например, крупнейшая из открытых баз данных Opencellid имеет информацию о 8 млн. точек. В итоге LBS получает данные от GPS спутников и GSM станций одновременно, повышая точность геолокации.
История создания GPS
Первый известный аналог GPS был описан в фантастическом романе Эрнста Юнгера «Гелиополь», который вышел в далёком 1949 году. Как ни странно, но GPS появился благодаря запуску СССР первого искусственного спутника Земли. Этот запуск не оставил равнодушными американских учёных во главе с Ричардом Кершнером, которые выяснили, что благодаря эффекту Доплера, частота принимаемого сигнала увеличивается, если спутник приближается, и уменьшается, если он отдаляется. Если точно знать собственные координаты, то можно определить положение и скорость полёта спутника. И наоборот, зная координаты спутника на земной орбите, можно узнать свою скорость и геолокацию.
Результатом этого важного открытия стал запуск спутников по программе Timation (в 1964 году) в интересах ВМФ США. Затем, уже в 1973 году, американцы запустили программу DNSS, позднее переименованную в NavSTaR (Navigation Satellite Timing and Ranging). Переводится как «время и дальность действия навигационного спутника». И если ранее первые спутники выводились на низкую околоземную орбиту, то по программе NavStar их выводили уже выше, на среднюю околоземную орбиту.
![]()
Первый спутник вышел на орбиту 14 июля 1974 года. Позднее, в 1982 году, вышел на орбиту и первый спутник советской системы позиционирования ГЛОНАСС. Шла холодная война, и успехи СССР, побудили США увеличить финансирование программы и ускорить работу. В 1983 году началось создание GPS. Для полного покрытия планеты система требовала 24 спутника, последний из которых вышел на орбиту в 1993 году. Этот год можно считать датой рождения современной GPS. Изначально она применялась для наведения ракет на воздушные и наземные цели.
Суть проблемы с GPS
Выяснилось, что в России появилась проблема с работой A-GPS. Это означает длительный старт позиционирования и недоступность спутниковых данных для многих гаджетов. Они просто не могут получить доступ к данным для GPS с серверов чипа, установленного в устройстве. Эти проблемы уже выявили у чипов Qualcomm (США) и MediaTek (Тайвань). Видимо компании, блокируют доступ к серверам для пользователей с российскими IP-адресами. После безуспешных попыток подключиться к серверам производителя чипов, гаджетам приходится подключаться непосредственно к навигационным спутникам, а это занимает гораздо больше времени. Если пользоваться VPN (который подменяет IP-адреса), то A-GPS функционирует нормально, что подтверждает версию о санкциях.
Проблемы пользователей
Проблемы, с которыми сталкивались пользователи:
- Если находишься в помещении, то отсутствие A-GPS даёт погрешность в определении координат.
- В приложениях такси местоположение гаджета не видно, пользователю приходится вручную выбирать его на карте.
- Приложение Яндекс Go стало периодически уточнять, где находится пользователь.
- У других пользователей регулярно прыгает позиционирование на карте.
- Около недели не работает фитнес приложение для пробежек, оно просто не отображало карту. Сначала пользователь грешил на проблемы с Google Карты, но с VPN оно заработало.
- Периодически Яндекс.Навигатор очень долго выясняет местоположение, решить проблему помогало переключение в авиарежим, либо перезагрузка телефона.
- Яндекс.Навигатор начал часто ошибаться, совсем терять геолокацию. Иногда он определяет скорость от 0 до 140 км/ч.
В марте текущего года глава «Роскосмоса» предупредил о том, что США не исключают отключения РФ от системы GPS.
Аналоги GPS и их применение
Как поясняют специалисты, совсем остаться без навигации России не грозит, поскольку в современных гаджетах предусмотрены сразу несколько навигационных систем. На сегодня активно эксплуатируются: GPS (США), ГЛОНАСС (Россия), Galileo (Европа), Бэйдоу (Китай). Также собственные навигационные спутниковые системы разрабатывают Индия и Япония. Эксперты отметили, что технически выключить в России GPS невозможно, поскольку это спутники висящие на орбите планеты и транслирующие сигнал. Возможно только отключить некоторые спутники, но в результате без GPS останутся и соседние с РФ страны.
![]()
рекомендации
Ищем PHP-программиста для апгрейда конфы
4070 MSI по старой цене дешевле Palit
13900K в Регарде дешевле чем при курсе 60
Но уже в апреле отечественным авиакомпаниям предписали подготовиться летать без использования GPS. В Росавиации обещали, что в случае перебоев с сигналом GPS, угрозы безопасности полётов не будет. Пояснив, что в 115 аэропортах России имеются локальные контрольно-корректирующие станции, постоянно мониторящие сигналы ГЛОНАСС и GPS, и выдающие поправки к ним, в случае сбоя или аномалии.
GPS (Global Positioning System) – это спутниковая система навигации, которая используется для определения местоположения объектов на земле. Ошибка GPS может возникнуть в любом месте и в любое время, что может привести к неправильной работе приложений, использующих GPS-координаты, таких как картографические приложения, навигаторы, спортивные трекеры и другие.
Ошибка GPS может быть вызвана различными причинами, включая плохую погоду, отсутствие соединения с спутниками, неправильные настройки на устройстве или приложении, недостаток оборудования, проблемы с геомагнитным полем и другие факторы.
Если вы столкнулись с ошибкой GPS, есть несколько способов ее исправить. Некоторые из них включают перезагрузку устройства, перезапуск приложения, проверку настроек GPS и устранение факторов, мешающих соединению с спутниками. Если проблема не устранилась, возможно, потребуется обратиться к профессионалам для более глубокой диагностики и ремонта оборудования.
Содержание
- Что такое GPS?
- Как работает GPS?
- Как определить ошибку GPS?
- Что может вызвать ошибку GPS?
- Как исправить ошибку GPS?
- Вопрос-ответ
- Что делать, если на моем устройстве показывает неправильную информацию о местоположении?
- Почему мое устройство не может определить мое местоположение в здании?
- Что я могу сделать, если GPS сигнал на моем устройстве слабый или отсутствует?
Что такое GPS?
GPS (от англ. Global Positioning System) – это глобальная система позиционирования, которая позволяет определять местоположение объекта на Земле с высокой точностью. Она была разработана для использования в военных целях США, но в настоящее время доступна для общественности.
GPS работает на основе сигналов, которые передают спутники вокруг Земли. Эти сигналы принимаются специальными приемниками, которые вычисляют расстояние между спутником и приемником. По этим данным происходит определение координат местонахождения объекта и его скорости движения.
GPS используется во многих сферах жизни, начиная от навигации и картографии, заканчивая автомобильной и авиационной промышленностями. Также GPS широко применяется в научных исследованиях, в том числе в геодезии, океанографии и метеорологии.
- Преимущества использования GPS:
- высокая точность определения местоположения объекта;
- широкий спектр применения в различных отраслях;
- надежность и доступность.
Тем не менее, при использовании GPS могут возникать различные проблемы, такие как ошибки в определении координат, сбои в работе, проблемы с получением сигнала. Ошибки в работе GPS могут быть вызваны как внешними, так и внутренними факторами, например, погодными условиями, ухудшением качества сигнала и т.д. Однако, большинство этих проблем можно решить, следуя основным правилам использования GPS и настройкам приемника.
Как работает GPS?
GPS – система глобального позиционирования. Она состоит из 24 спутников, которые кружат вокруг Земли на высоте около 20 000 км, а также из приемников, которые устанавливаются на Земле.
GPS-приемник собирает сигналы от нескольких спутников и на основе этих данных вычисляет свое местоположение.
Каждый спутник GPS постоянно испускает сигналы, которые содержат информацию о текущем времени и координатах спутника. Этот сигнал достигает приемника на Земле со скоростью света. Измеряя время, за которое сигнал путешествует от спутника до приемника, и зная расстояние до спутника, GPS-приемник может определить свое местоположение с точностью до нескольких метров.
Для более точного определения координат GPS-приемник должен получать сигналы от нескольких спутников. Это объясняется тем, что сигналы могут подвергаться отражению от зданий и других препятствий, что может привести к искажению результатов. Если же приемник получает сигналы от нескольких спутников, он может использовать триангуляцию для более точного определения местоположения.
Таким образом, GPS – это очень удобный инструмент для навигации и ориентации в мире. Он широко используется не только для автомобильных навигаторов, но и в армии, авиации и даже в обычной повседневной жизни.
Как определить ошибку GPS?
GPS, или глобальная система позиционирования, предоставляет пользователям точные данные о местоположении. Однако, иногда при использовании GPS возникают ошибки, и это может создавать проблемы. Вот несколько способов, как определить ошибку GPS.
1. Проверьте, включен ли GPS
Перед тем, как искать ошибку, убедитесь, что GPS на вашем устройстве включен. Если GPS отключен, данные о местоположении могут отсутствовать или быть неточными.
2. Проверьте качество сигнала
Если качество сигнала не является достаточно сильным, GPS не сможет точно определить ваше местоположение. Проверьте, есть ли устройство прямая видимость на небо, может быть, вы находитесь в закрытом помещении или находитесь в зоне плохой связи, тогда следует переместиться в другое место.
3. Проверьте настройки приложения, использующего GPS
Если вы используете приложение, которое использует GPS, то проверьте настройки приложения на наличие необходимых разрешений. Если разрешения не были предоставлены, то данные о местоположении могут быть недоступны для приложения.
4. Проверьте оборудование
Если все еще есть проблемы с GPS, то проблема может быть в самом устройстве. Убедитесь в том, что устройство, которое вы используете для позиционирования, поддерживает GPS.
Вывод: Если GPS действительно не работает, то необходимо установить версию приложения, проверить оборудование, и если нужно, воспользуйтесь другим устройством для позиционирования. Однако, если вы все-таки не можете получить точные данные, то разумнее всего обратиться за помощью к специалистам.
Что может вызвать ошибку GPS?
1. Проблемы с приемником GPS
Приемник GPS может быть поврежден или неисправен, что приведет к тому, что он не сможет получить сигнал от спутников и установить местоположение. В этом случае необходимо заменить приемник или обратиться к специалистам для его ремонта.
2. Расположение и окружение
В зданиях, автомобилях, в ущельях, находясь в густой растительности может быть проблема с приемом сигнала, и это может привести к ошибкам в показаниях GPS.
3. Неправильная настройка
Если приемник GPS неправильно настроен, то может возникнуть ошибка, которая приведет к неверным данным. Необходимо убедиться, что приемник настроен правильно.
4. Проблемы с сигналом спутника
Если спутник не работает должным образом или находится в позиции, которая не позволяет ему быть «видимым» для приемника GPS, то наблюдается ошибка в показаниях местоположения. Но это редко бывает, так как для GPS предусмотрена система дублирования спутников на разных орбитах.
5. Проблемы со смежными технологиями
Некоторые технологии могут влиять на работу GPS, например, некоторые радиопередачи или сигналы Wi-Fi. В этом случае необходимо перенести смартфон или приемник на безопасное расстояние от источников сигнала.
Как исправить ошибку GPS?
Если ваше устройство не успевает определить местоположение или выдает ошибку GPS, не отчаивайтесь. Ниже приведены несколько советов, которые могут помочь вам исправить ошибку GPS:
- Проверьте настройки GPS. Убедитесь, что включен режим GPS и приложения, использующие GPS, имеют разрешение на его использование.
- Перезагрузите устройство. Иногда перезагрузка устройства может помочь исправить ошибку GPS.
- Проверьте место использования. В некоторых местах, таких, как здания или места с плохой связью, GPS может работать нестабильно.
- Обновите приложения и операционную систему. Убедитесь, что приложения, использующие GPS, и операционная система устройства обновлены до последней версии.
- Сбросьте настройки GPS. В некоторых случаях сброс настроек GPS может помочь исправить ошибку. Для этого нужно перейти в настройки устройства, выбрать раздел «Система» или «Общие настройки», найти раздел «Сброс» и выбрать опцию «Сбросить настройки GPS».
Несколько мер, которые могут помочь вам исправить ошибку GPS. Если ни одна из перечисленных выше мер не помогла, возможно, причиной проблемы является неисправность аппаратного обеспечения устройства. В таком случае рекомендуется обратиться за помощью в сервисный центр.
Вопрос-ответ
Что делать, если на моем устройстве показывает неправильную информацию о местоположении?
Сначала убедитесь, что у вас включен режим GPS и устройство имеет доступ к сигналу GPS. Если это не помогает, попробуйте перезагрузить устройство или провести калибровку датчика GPS. Если эти действия не помогли, попробуйте воспользоваться приложением для проверки состояния датчика GPS, в котором можно диагностировать проблему и попробовать исправить ее.
Почему мое устройство не может определить мое местоположение в здании?
GPS сигнал имеет ограничения в зданиях, так как он не проникает сквозь стены и крыши. Поэтому в помещении лучше использовать Wi-Fi или сотовые данные для определения местоположения, так как они работают на более коротких дистанциях и не зависят от проницаемости стен. Также существуют специальные приложения, которые позволяют определять местоположение в помещении с помощью Bluetooth-датчиков, но они требуют дополнительного оборудования.
Что я могу сделать, если GPS сигнал на моем устройстве слабый или отсутствует?
Сначала проверьте, что устройство имеет доступ к надежному сигналу GPS, для этого выйдите на открытое пространство или переместитесь ближе к окну. Также убедитесь, что устройство не блокирует сигнал GPS, например, не находится в кармане или сумке. Если это не работает, попробуйте перезагрузить устройство или провести калибровку датчика GPS. Если эти действия не приводят к желаемому результату, попробуйте воспользоваться приложением для усиления сигнала GPS или внешним GPS-приемником, который можно подключить к устройству по Bluetooth или через порт USB.
У массового пользователя сохраняется еще вера в старые легенды, а навигационные ошибки повторяются из раза в раз и совершенно не зависят от цены и степени крутизны купленного прибора.
GPS приемники распространены уже не меньше чем мобильные телефоны, а это означает, что они стали обычным «бытовым» прибором. Современных пользователей GPS не интересует, как работает система, как летают спутники и с какой частотой на приемники приходит сигнал. Так же как мало кого из посылающих SMS интересует, где находится антенна ближайшей «соты» или мощность радиопередатчика в телефоне.
Несмотря на это, у массового пользователя сохраняется еще вера в старые легенды, а навигационные ошибки повторяются из раза в раз и совершенно не зависят от цены и степени крутизны купленного приборчика.
Сначала договоримся о терминах. GPS — это Global Positioning System, система глобального позиционирования, то есть система, дающая возможность определить свои координаты на поверхности Земли и в воздухе в любой точке. Строго говоря, термин GPS означает как американскую систему Nawstar так и российскую Глонас. Но поскольку Глонас толи работает, толи нет, и в магазинах приемники Глонас не купишь, массовый потребитель стал по умолчанию считать, что GPS это и есть исключительно система Nawstar. Если исходить из современных реалий, то с этой точкой зрения следует согласиться, несмотря на обещание правительства России ввести Глонас в строй как можно скорее. В принципе, и секстан можно отнести к GPS приборам.
Система GPS состоит из орбитальной группировки: набора спутников, наземных центров управления и ряда наземных станций. Конечным звеном в этой цепи являются различные GPS терминалы, использующиеся в самых разнообразных целях. Нас, как «пользователей-туристов» и яхтсменов, прежде всего, интересуют мобильные GPS терминалы — приемники, которые обрабатывают информацию в режиме реального времени. В отличии от разных других GPS приборов, нам нужны такие, которые определяют наше место «мгновенно» и «постоянно». Понятия эти условны, но если мы будем получать свои координаты 1 раз в секунду, то будем считать, что имеем эту информацию «непрерывно».
К наиболее устойчивым легендам о GPS Nawstar (далее просто GPS) относится то, что «американцы специально снижают точность определения координат». Из этого, якобы, следует, вывод о некоторой ограниченности применения приемника. На самом деле история такая. Действительно, в системе GPS существуют два сегмента: военный и гражданский. Военные приемники GPS способны принимать дополнительные спутниковые сигналы, которые «не слышны» гражданским приемникам. С помощью этой технологии военные пользователи системы могут получить ряд преимуществ. Кроме того, центр управления GPS может включить режим «селективного доступа», который либо, условно говоря, снижает точность гражданского приемника GPS, либо «вырубает» гражданский сегмент GPS вообще или в каком-то районе Земли.
В 2000 году президент Клинтон принял историческое решение и отменил, действовавший до того момента, режим селективного доступа. Тем самым, с 2000 года все гражданские приемники, если они исправны и «видят» достаточное количество спутников, определяют координаты примерно одинаково и с достаточной для навигации точностью. В этом легко убедиться самостоятельно. Засечь точку и вернуться в нее через какое-то время. В зависимости от условий средний GPS найдет место с точностью 3−10 метров. Иногда может получиться «тютелька в тютельку», но это скорее везение, чем точная работа прибора.
Подобной точности недостаточно для строительных, геодезических и прочих работ, но для навигации, даже воздушной, вполне хватает.
Режим селективного доступа, при этом, может быть включен по решению правительства США, но делается это в исключительных случаях, ограниченно и с заблаговременным предупреждением.
Так, например, гражданский сектор GPS был выключен во время войны в Ираке во всем районе боевых действий. Это лишило иракцев, купивших, естественно, гражданские приемники возможности использовать американские технологии в военных целях.
Следующей проблемой военных, вероятно, станут картографические он-лайн сервисы типа terraserver.com или более известный google maps. Космические снимки на них со временем, очевидно, будут обновляться все быстрее и не исключено, в принципе, что следующий шаг — это наблюдение самого себя на местности. Что было бы удобно, к примеру, для выбора места в марине и т.д. Но это надо еще подождать.
При каждом включении современный гражданский приемник GPS демонстрирует предупреждение, что он не может быть использован как единственное средство навигации. На это важное правило следует обратить внимание. Эта надпись на экране вовсе не означает, что прибор изначально неточный или производители сомневаются в его качестве. Безусловно, производители приборов хотят отгородиться от возможных судебных исков, но дело не только в этом. GPS терминал это, прежде всего, прибор, сообщающий координаты точки, в которой он находится. Прибор и его создатели не могут отвечать за все неправильные действия, которые совершили неграмотные пользователи прибора. Не надо требовать от приемника, чтобы он делал выводы. Он не умеет.
Первое, на что обращает внимание владелец прибора, что он едет «мимо карты». В том случае если в приемнике есть «зашитая» карта. Этим несовпадением точки, в которой очевидно находится пользователь прибора с точкой на карте, которую указал прибор, страдают очень большое количество приемников. Этой теме можно посвятить сколько угодно времени и статей, но будем исходить из того, что в нашу задачу не входит сделать из собственного GPS точный картплоттер. Во-первых, чтобы сделать надежный картплоттер, то есть чтобы точка в которой находится прибор, в точности совпадала с аналогичной точкой на карте, нужно хорошо разбираться в устройстве GPS. Во-вторых, нужно хорошо понимать, каким образом и кем была изначально создана карта, используемая в приборе.
Карты могут быть сделаны в разных математических моделях, то есть немного по-разному представлять форму Земного шара, из-за чего, как правило, и возникает «сдвиг» карты относительно координат, определенных прибором. Несмотря на то, что новые карты создаются в системе WGS84 (World Geodesic System 1984 года) и GPS приемник можно настроить на работу в этой системе, сохранилось огромное количество карт, созданных в других системах. Друг от друга эти карты отличаются, как правило, не сильно. Если поставить определенную с помощью GPS приемника точку на двух разных картах одной и той же местности, сделанных в разных системах, то расстояние между этими точками будет составлять десятки или сотни метров. Стоит ли эта погрешность того, чтобы влезать в прибор и в настройки карт — вопрос спорный. Но главное, что если даже потратив какие-тоусилия мы добьемся точного «попадания» точки в карту, то где гарантия, что это точное соответствие сохранится в другом районе Земли? Для морской навигации незначительный сдвиг карты совершенно не принципиален, пусть даже прибор показывает, что яхта стоит не у причала, а на берегу. Мы то знаем, что стоим у причала. По этим и другим причинам, и RYA и просто здравый смысл, запрещают использовать GPS, как единственное средство навигации. То есть подходить к причалу или в узкость следует не только глядя в прибор, но и по сторонам, как минимум. Для решения большинства задач вполне достаточно знать параметры «сдвига» карты и прочих погрешностей и учитывать их, прокладывая безопасный курс.
О таком сдвиге реального курса относительно трека GPS забыл прошлым летом шкипер яхты Fleur de Mer (типа Bowman 40) Жак Демарти (Jacques Demarty), принимавший участие в регате Blue Water Round-the World 2005?2006. За 45 лет путешествий под парусом Жак Демарти прошел более 100 тысяч морских миль. Тем не менее, зная о различии реального курса и трека GPS в 400 метров, он «просто забыл» об этом. Он провел яхту слишком близко к берегу острова Los Rocques в водах Венесуэлы и выложил лодку на тянущийся от острова риф. В прибое яхта потеряла мачту, сильно повредила корпус, а экипаж из трех человек, с большим трудом выбрался на берег.
Помогло бы шкиперу отсутствие погрешности GPS, вопрос спорный, поскольку данная ошибка исключительно «человеческого фактора». Он мог также «забыть» (случившееся он объяснил забывчивостью) что-нибудь еще.
Вторая типичная ошибка — это установка в приборе путевых точек, рекомендованных лоциями или координат таких объектов, как край волнолома или буй. Направляясь к такой путевой точке по GPS, экипаж постоянно имеет информацию о направлении на точку, оставшемся до нее расстоянии и т.д. Следует помнить при этом, что GPS определяет курс на точку по прямой, которая может проходить через другие навигационные опасности. В конце концов, велика вероятность, что лодка просто воткнется в этот буй или мол. Также она может столкнуться с другими яхтами, которые используют для навигации те же рекомендованные популярными пайлотами путевые точки. Чтобы уменьшить риск следует вводить свои собственны путевые точки, что занимает ровно столько же времени.
Третья ошибка — неправильное понимание предоставляемой прибором информации. Допустим, мы выставили путевую точку и движемся к ней по прямой. Прибор исправно докладывает о постепенном сокращении расстояния «до цели» и указывает направление на точку. Мы следуем этому указанию и стрелка, на экране, точно показывает на нос нашей лодки. Ожидаемое время прибытия в точку тоже сокращается. По неопытности пользователь может сделать вывод, что он действительно движется в нужную точку почти по прямой и раз расстояние до точки сокращается, то все в порядке. На самом деле, это серьезная ошибка. GPS не показывает боковой снос судна. При наличии течения и ветра лодку сносит с курса, а рулевой, сам того не замечая, постепенно подруливает, следуя указанию прибора, в сторону путевой точки. Для рулевого картина выглядит просто — путевая точка все время впереди. Но на самом деле яхта описывает довольно широкую дугу и запросто может налететь на препятствия, находящиеся, с точки зрения экипажа, далеко сбоку.
В моей практике была подобная ситуация при ночном переходе с острова Липари на Стромболи. Между этими островками лежит крошечный и обычно необитаемый островок Панареа, окруженный подводными скалами. В условиях ночи этот остров практически не видим, а из ориентиров, на которые можно взять пеленги только остающиеся по корме два ярких огня острова Салина. В этом месте существует сильное восточное течение. Лодку незаметно, но сильно стало сносить к востоку. GPS этот снос не демонстрировала, так как участок трека, который был виден на экране был слишком мал чтобы можно было заметить характерную дугу. Зная о подобной ситуации вахта раз в несколько минут брала пеленги на Салина, пока было возможным, а затем вела прокладку по бумажной карте, используя численные значения координат по GPS. На бумажной карте снос был очевиден и, более того, стало понятно, что лодка имеет все шансы въехать в остров Панареа. Для возвращения лодки на правильный курс пришлось направить лодку «левее» сначала на 30, потов на 60, а затем вообще на 90 градусов и еще включить мотор — так усилилось течение. В итоге остров остался по правому борту в 1,5 — 2 милях.
Чтобы компенсировать недостатки встроенной карты можно заранее внести в прибор достаточное количество путевых точек, координаты которых заранее сняты с надежной бумажной карты. Это простой и безопасный способ иметь под рукой в палубных условиях информацию о реальном положении и расстоянии до ближайших опасных объектов, мысов и т.д.
По этим причинам понятно, что использовать GPS как единственное средство навигации, неразумно. Полезно дополнять прибор компасом-пеленгатором и здравым смыслом. Их можно также использовать в случае отказа GPS по тем или иным причинам, но если прибор отказал, лучше просто включить второй GPS.
17 Сентября 2007
01.03.2021
Глава 5 — Устранение ошибок ГНСС
Устранение ошибок является основополагающим для работы ГНСС приемника. То, как производитель разрабатывает оборудование, включая электронные и механические компоненты или программное обеспечение, напрямую влияет на эффективность коррекции ошибок.
Чем больше ошибок может устранить приемник, тем более высокую степень точности и надежности он может предложить пользователю. Какой метод исправления ошибок идеальный? На самом деле не существует никакого «лучшего способа», поскольку все зависит от постановки задач конечным пользователем.
Используя ГНСС приемник в своем мобильном телефоне, Вы обнаружите, что поиск нового ресторана не требует такого же уровня производительности, как, например, посадка беспилотного вертолета на движущуюся платформу. Существуют компромиссы между различными методами устранения ошибок в сигналах ГНСС.
Используемые методы зависят от уникальных требований для каждого применения, таких как уровень точности, сложность системы, доступность решения, надежность и стоимость. В главе 2 мы представили основные концепции определения местоположения с использованием ГНСС, в частности, применительно к автономному способу, когда один приемник работает индивидуально для определения своего местоположения и времени.
В этой главе мы представляем методы, с помощью которых приемники ГНСС улучшают характеристики за счет использования более продвинутых решений, которые уменьшают или устраняют ошибки в вычислении координат.
По сути, позиционирование ГНСС начинается с простой математической формулы: Скорость = Расстояние ÷ Время. Следовательно, необходимо учитывать факторы, влияющие или на расстояние до спутника, или время, необходимое для того, чтобы спутниковый сигнал достиг антенны.К счастью, некоторые очень умные люди разработали разные методы устранения ошибок.
В целом их можно описать следующим образом:
A. Усреднение повторных наблюдений в одном и том же месте (наименее эффективный метод).
B. Моделирование явления, вызывающего ошибку, и прогнозирование значений коррекции.
C. Дифференциальная коррекция (DGNSS).
В этой главе мы рассмотрим ряд методов коррекции, то, как они работают, а также некоторые преимущества и недостатки каждого метода. Но давайте сначала посмотрим на концепции измерений ГНСС (мультисистемных и мультичастотных), кодовых и фазовых, и их влияние на коррекцию ошибок и характеристики вычисления координат.
Мультисистемность и мультичастотность
Мультисистемность
Способность ГНСС приемника обрабатывать несколько частот от нескольких созвездий при вычислении местоположения. Имеет важное значение для оптимального разрешения ошибок.
Мультичастотность
Использование мультичастотных приемников — наиболее эффективный способ устранить ионосферную ошибку из расчета местоположения. Ионосферная ошибка зависит от частоты, поэтому она по-разному влияет на различные сигналы ГНСС.
Сравнивая задержки двух сигналов L1 и L2, приемник может корректировать влияние ионосферных ошибок. Новые и модернизированные широкополосные сигналы в диапазоне L5 / E5a имеют встроенные средства для коррекции шума и влияния многолучевости.
Для приемников комбинация использования сигналов диапазона L5 / E5a с возможностью устранения ионосферной ошибки за счет двухчастотного режима позволяет достичь значительных улучшений, как в измерениях, так и в точности вычисления координат. Мультичастотные приемники обладают большей устойчивостью к помехам.
Если есть помехи в полосе частот L2 (1227 МГц), то мультичастотный приемник все равно будет отслеживать сигналы L1 и L5, для обеспечения постоянного позиционирования.
Мультисистемность
Как описано ранее, мультисистемный приемник может принимать сигналы от нескольких созвездий: например, GPS, ГЛОНАСС, BeiDou и Galileo.
Использование других систем в дополнение к GPS приводит к тому, что в «поле зрения» появляется большее количество спутников, что дает следующие преимущества:
-уменьшается время разрешения неоднозначности;
-повышается точность определения местоположения и времени;
-уменьшается влияние многолучевости, вызванной отражением от препятствий, таких как здания и листва;
-улучшается геометрическое распределение видимых спутников, что приводит к повышению точности.
Когда ГНСС приемник использует сигналы от множества созвездий, в конечном решении предусмотрено резервирование. Если сигнал блокируется из-за влияния окружающей среды, существует очень высокая вероятность того, что приемник может просто принять сигнал от другой системы ГНСС и обеспечить непрерывность решения. Хотя это бывает крайне редко, в случае отказа одной системы ГНСС доступны другие системы.
Чтобы определить положение в режиме использования только GPS, приемник должен отслеживать как минимум четыре спутника. В режиме работы с несколькими созвездиями приемник должен отслеживать пять спутников, по крайней мере один из которых, должен быть от спутника другой системы, для того, чтобы приемник мог определить временной сдвиг между созвездиями.
ГНСС измерения
Точность кодовых и фазовых измерений ГНСС Метод определения местоположения, описанный в главе 2, называется кодовым методом, потому что приемник находит корреляцию кодов псевдослучайного шума (PRN), передаваемыми четырьмя или более спутниками, и использует их для определения своего местоположения и времени. В результате точность позиционирования составляет несколько метров.
Для некоторых приложений, например для геодезической съемки, требуется более высокая точность. Были разработаны методы на основе передачи поправок по дополнительному каналу связи, такие как кинематика в реальном времени (RTK) и система точного позиционирования (PPP), которые могут обеспечивать точность координат на несколько порядков точнее, чем ГНСС измерения на основе кода.
A. Фазовая модуляция несущей волны с использованием кода PRN применяется для разделения спутниковых сигналов и предоставления информации о синхронизации для измерений дальности.
B. Измерения, основанные на модуляции PRN, однозначны, но точность ограничена субметрами.
C. Несущая волна для сигнала ГНСС представляет собой синусоидальную волну с периодом менее одного метра (19 см для L1), что позволяет проводить более точные измерения.
D. Измерения фазы несущей волны могут быть выполнены с точностью до миллиметра, но измерение неоднозначно, поскольку общее количество циклов между спутником и приемником априори неизвестно.
Разрешение или оценка неоднозначности фазы несущей является ключом к достижению точного позиционирования с помощью RTK или PPP.
В двух методах используются разные способы достижения этой цели, но в обоих используются:
• псевдодальности (на основе кодовых измерений) для предварительной оценки местоположения;
• устранение ошибок позиционирования с помощью относительного позиционирования или данных коррекции;
• множественные наблюдения спутникового сигнала для поиска условий разрешения неоднозначности, которые лучше всего подходят для данных измерений.
Следовательно, метод, используемый приемником для измерений на основе кода или фазы несущей, влияет на результаты позиционирования.

Рис. 39
Дифференциальные методы ГНСС
Обычно используемый метод улучшения ГНСС определений — это дифференциальная коррекция, которая проиллюстрирована на рис 40.
В дифференциальном методе ГНСС положение фиксированного приемника, называемого базовой станцией, определяется с высокой степенью точности с использованием традиционных методов съемки.
Затем базовая станция определяет дальность до видимых спутников ГНСС, используя:
-методику позиционирования на основе кода, описанную в главе 2;
-местоположение спутников, определяемое по точно известным эфемеридам орбиты и спутниковому времени.
Базовая станция сравнивает свое положение, полученное на основе традиционных методов съемки с положением, вычисленным на основе расстояний до спутников. Различия между положениями могут быть связаны с ошибками спутниковых эфемерид и часов, но в основном с ошибками, связанными с атмосферной задержкой.
Базовая станция передает эти ошибки другим, перемещаемым, приемникам (роверам), которые включают поправки в расчеты своего местоположения.

Рис. 40
Для метода дифференциального позиционирования требуется канал передачи данных между базовой станцией и роверами, если поправки необходимо вносить в реальном времени, и наличие как минимум четырех спутников ГНСС в поле зрения, как на базовой станции, так и на роверах. Абсолютная точность вычисленного положения ровера будет зависеть от абсолютной точности координат базовой станции.
Поскольку спутники ГНСС вращаются высоко над Землей, пути распространения сигналов от спутников к базовым станциям и роверам проходят в одинаковых атмосферных условиях, только если базовая станция и роверы расположены не слишком далеко друг от друга. Дифференциальные методы ГНСС очень хорошо работают на расстояниях между базовыми станциями и роверами до нескольких десятков километров.
Спутниковые системы дополнения ГНСС
Для задач, в которых стоимость дифференциальных методов ГНСС не оправдана или если подвижные приемники разбросаны по слишком большой территории, спутниковая система дополнения (SBAS) может быть более подходящей для повышения точности определения местоположения.
Системы SBAS — это геосинхронные спутниковые системы, которые предоставляют услуги по повышению точности, целостности и доступности основных сигналов ГНСС.
Точность повышается за счет передачи глобальных поправок для коррекции измеренных дальностей до спутников ГНСС.
Целостность повышается за счет того, что сеть SBAS быстро обнаруживает ошибки спутникового сигнала и отправляет приемникам предупреждения о том, что они не должны отслеживать отказавший спутник.
Доступность сигнала может быть улучшена, если SBAS передает сигналы дальности со своих спутников. Системы SBAS включают опорные станции, главные станции, станции обеспечения линии связи с геостационарными спутниками и сами спутники, как показано на рис 41.

Рис. 41
Базовые станции, которые географически распределены по всей зоне обслуживания SBAS, принимают сигналы ГНСС и передают их на главную станцию. Поскольку местоположения опорных станций точно известны, главная станция может рассчитать поправки на большую территорию.
Поправки передаются на спутник SBAS, а затем передаются на приемники ГНСС по всей зоне покрытия SBAS.
Пользовательское оборудование получает поправки и применяет их для расчета дальностей.
В следующих разделах представлен обзор некоторых сервисов SBAS, которые были реализованы по всему миру или планируются.
Система расширенной зоны охвата (WAAS)
Федеральное управление гражданской авиации США (FAA) разработало Систему расширенной зоны охвата (WAAS) для обеспечения поправками GPS и сертифицированного уровня целостности авиационной отрасли, чтобы позволить самолетам выполнять точные заходы на посадку в аэропортах. Поправки также доступны для гражданских пользователей в Северной Америке бесплатно.
Глобальная главная станция (WMS) принимает данные GPS от глобальных опорных станций (WRS), расположенных по всей территории США. WMS вычисляет дифференциальные поправки, а затем передает их по линии связи на два геостационарных спутника WAAS для трансляции на территории Соединенных Штатов.
Отдельные поправки рассчитываются для ионосферной задержки, синхронизации бортовых часов и спутниковых орбит, что позволяет, при необходимости, учитывать их по отдельности в пользовательском приложении.
WAAS передает данные поправок на той же частоте, что и GPS. Это позволяет использовать для приема данных тот же приемник и антенное оборудование. Для получения данных коррекции пользовательское оборудование должно находиться в зоне прямой видимости одного из спутников WAAS.
Европейская геостационарная навигационная служба (EGNOS)
Европейское космическое агентство в сотрудничестве с Европейской комиссией (ЕС) и EUROCONTROL (Европейская организация по безопасности аэронавигации) разработало Европейскую геостационарную навигационную службу (EGNOS), систему дополнения ГНСС, которая повышает точность определения местоположения по GPS, отслеживает и предупреждает пользователей о надежности сигналов GPS.
Три спутника EGNOS охватывают территории стран — членов Европейского Союза и несколько других стран Европы. EGNOS передает данные дифференциальной коррекции для общего пользования и сертифицирован для применения в сфере для обеспечения безопасности жизни. Спутники EGNOS также были размещены над восточной частью Атлантического океана, Индийским океаном и средней частью африканского континента.
Спутниковая навигационная система MTSAT (MSAS)
MSAS — это вариант системы SBAS, который предоставляет услуги по расширению в Японии. Он использует два многофункциональных спутника (MTSAT) и сеть наземных станций для усиления сигналов GPS в Японии.
Система расширенной геонавигации с поддержкой GPS (GAGAN)
GAGAN — это вариант системы SBAS, которая поддерживает навигацию в воздушном пространстве Индии. Система основана на трех геостационарных спутниках, 15-ти опорных станциях, установленных по всей Индии, трех станциях линии связи и двух центрах управления. GAGAN совместим с другими системами SBAS, такими как WAAS, EGNOS и MSAS.
Система дифференциальной коррекции и мониторинга (СДКМ)
Российская Федерация разрабатывает СДКМ, чтобы обеспечить на территории России повышенную точность и мониторинг целостности для систем навигации ГЛОНАСС, и GPS. К 2016 году Российская Федерация планирует обеспечить покрытие L1 SBAS на всей территории России, а к 2018 году — покрытие L1 / L5. СДКМ также будет предоставлять услуги точного позиционирования (PPP) для L1 / L3 ГЛОНАСС к 2018 году*
*(данные о СДКМ по состоянию на 2015 год).
Другие системы SBAS
Китай планирует использовать SNAS (спутниковую навигационную систему дополнения) для предоставления услуг, аналогичных WAAS, для региона Китая.
Наземная система дополнения (GBAS)
Наземная система дополнения (GBAS) обеспечивает передачу дифференциальных поправок и мониторинг целостности данных спутников для приемников, использующих УКВ радиоканал. Также известная как система локального расширения (LAAS), GBAS состоит из нескольких антенн ГНСС, размещенных в известных местах, центральной системы управления и УКВ радиопередатчика.
GBAS охватывает относительно небольшую территорию (по стандартам ГНСС) и используется для приложений, требующих высокого уровня точности, доступности и целостности. Аэропорты являются примером приложения GBAS.
Кинематика в реальном времени (RTK)
Метод позиционирования, описанный в главе 2, называется позиционированием на основе кодовых измерений, потому что приемник находит корреляцию для псевдослучайных кодов, передаваемых четырьмя или более спутниками, и использует их для определения дальности до них. Из величин этих расстояний и зная, где находятся спутники, приемник может определить свое положение с точностью до нескольких метров.
Что такое RTK (кинематика в реальном времени)?
RTK расшифровывается как «кинематика в реальном времени» и представляет собой метод, который использует измерения на основе фазы несущей и получает дальности (и, следовательно, координаты), которые на несколько порядков точнее, чем те, которые доступны при позиционировании на основе кода. Методы RTK сложны. Основная концепция заключается в уменьшении и устранении ошибок, общих для пары базовой станции и ровера, как показано на рис. 42.

Рис. 42
Точность RTK GPS: Что такое точность RTK?
RTK используется для приложений, требующих более высокой точности, например определение координат с сантиметровой точностью, т.е. до 1 см + 1 ppm (мм/км).
Расчет дальностей
На базовом концептуальном уровне дальность вычисляется путем определения количества циклов несущей между спутником и подвижной станцией, а затем умножения этого числа на длину волны несущей.
Вычисленные диапазоны по-прежнему включают ошибки от таких источников, как спутниковые часы и эфемериды, а также ионосферные и тропосферные задержки. Чтобы устранить эти ошибки и воспользоваться преимуществами точности измерений на основе несущей, для работы RTK требуется, чтобы измерения передавались с базовой станции на станцию подвижного приемника.
Для определения количества полных циклов необходим сложный процесс, называемый «разрешением неоднозначности». Несмотря на сложность процесса, высокоточные ГНСС приемники могут почти мгновенно разрешить неоднозначности. Краткое описание неоднозначностей см. в разделе «ГНСС измерения» ранее в этой главе. Для получения дополнительной информации о разрешении неоднозначности см. ссылки в конце этой книги.
Подвижные приемники определяют свое местоположение с помощью алгоритмов, включающих разрешение неоднозначности и дифференциальную коррекцию. Как и в случае DGNSS, точность определения местоположения, достигаемая ровером, зависит, среди прочего, от его расстояния от базовой станции (называемого «базовой линией») и точности дифференциальных поправок. Поправки так же точны, как известное местоположение базовой станции и качество спутниковых наблюдений базовой станции. Выбор площадки важен для минимизации воздействия окружающей среды, помех и многолучевости, а также качества базовой станции, приемников и антенн подвижного приемника.
Сетевое RTK
Сетевое RTK основано на использовании нескольких далеко разнесенных постоянных базовых станций. В зависимости от реализации данные о местоположении с постоянных станций регулярно передаются на центральную станцию обработки.
По запросу от пользовательских терминалов RTK, которые передают свое приблизительное местоположение на центральную станцию, центральная станция вычисляет и передает информацию о коррекции или скорректированное местоположение на пользовательский терминал RTK.
Преимущество этого подхода — общее сокращение количества необходимых базовых станций RTK. В зависимости от реализации данные могут передаваться по сотовой радиосвязи или другому беспроводному каналу.
Система точного позиционирования (PPP)
Что такое точное позиционирование (PPP)?
PPP — это метод определения местоположения, который удаляет или моделирует системные ошибки ГНСС для обеспечения высокого уровня точности определения местоположения одиночного приемника. Решение PPP зависит от поправок в бортовые часы ГНСС и поправок для параметров орбиты, генерируемых сетью глобальных опорных станций.
После расчета поправок они доставляются конечному пользователю через спутник или через Интернет. Эти поправки используются приемником, обеспечивая субдециметровый уровень точности без необходимости использования базовой станции.
Какова точность PPP?
PPP обеспечивает точность до 2-3 сантиметров. Типичное решение PPP требует значительного периода времени для достижения субдециметровой точности, чтобы устранить любые локальные отклонения, вызванные иными атмосферными условиями, многолучевостью сигнала и геометрического расположения спутников. Фактически достигаемая точность и необходимое время сходимости решения зависят от качества поправок и того, как они используются в приемнике.
Похожая по структуре на систему SBAS, система PPP предоставляет поправки приемнику для повышения точности определения местоположения. Однако системы PPP обычно обеспечивают более высокий уровень точности и взимают плату за доступ к поправкам. Системы PPP также позволяют использовать единый поток поправок во всем мире, в то время как системы SBAS являются региональными. Типичная система PPP показана на рис. 43.

Рис. 43
Основные источники ошибок для PPP устраняются несколькими способами.
Двухчастотный режим: ионосферная задержка первого порядка пропорциональна частоте несущей волны. Следовательно, ионосферная задержка первого порядка может быть полностью устранена путем использования комбинаций двухчастотных измерений ГНСС.
Данные внешней коррекции ошибок: сюда входят поправки на орбиту спутника и часы. В случае использования сервиса от компании TerraStar сгенерированные поправки передаются конечным пользователям через телекоммуникационные спутники Inmarsat.
Моделирование: задержка в тропосфере рассчитывается на основе модели UNB, разработанной Университетом Нью-Брансуика. Однако часть тропосферной задержки, зависимая от влажности воздуха, сильно меняется и не может быть смоделирована с достаточной точностью. Таким образом, остаточная задержка в тропосфере рассчитывается при оценке местоположения и других неизвестных. Моделирование также используется в приемнике PPP для коррекции эффекта смещения литосферных плит.
Алгоритмы фильтра PPP: для оценки PPP используется расширенный фильтр Калмана (РФК). Положение, ошибка часов приемника, тропосферная задержка и неоднозначности фазы несущей рассчитываются методами РФК. Фильтр снижает уровень шума в системе и позволяет определять положение с точностью до сантиметра.
Значения параметров РФК улучшаются с помощью последовательных измерений ГНСС, пока они не сходятся к стабильным и точным значениям. Типичное время сходимости PPP к плановой ошибке менее 10 см составляет от 20 до 40 минут, но оно зависит от количества доступных спутников, геометрического фактора расположения спутников, качества средств коррекции, многолучевого распространения сигнала и атмосферных условий.
Есть несколько поставщиков услуг PPP, в том числе VERIPOS, TerraStar, OmniSTAR и StarFire. Поставщики услуг PPP управляют сетью наземных опорных станций для сбора данных поправок для различных сигналов, передаваемых каждым спутником. Поправки, рассчитанные на основе этих данных, передаются с геостационарных спутников приемникам подписанных пользователей.
Постобработка данных ГНСС
Для многих приложений, таких как аэрофотосъемка, исправленные положения ГНСС в реальном времени не требуются. Для этих приложений необработанные спутниковые измерения собираются и сохраняются для последующей обработки после окончания полевых работ. В отличие от определения местоположения методами RTK, пост-обработка не требует передачи сообщений дифференциальной коррекции в реальном времени. Это значительно упрощает конфигурацию оборудования.
Во время постобработки можно использовать данные базовой станции от одного или нескольких ГНСС приемников. Совместная обработка помогает сохранить высокую точность на больших участках проекта, что является обычным явлением для авиационных приложений. В зависимости от близости проекта к постоянно действующей сети ГНСС данные базовых станций часто могут быть загружены бесплатно, что избавляет от необходимости устанавливать собственные базовые приемники. Более того, можно обрабатывать данные без каких-либо базовых станций посредством PPP, который использует загруженные данные точных часов и эфемерид.
Приложения для постобработки предлагают большую гибкость. Они могут включать стационарные или движущиеся базовые станции, а некоторые поддерживают интеграцию с программными модулями заказчика или сторонних производителей. Приложения для постобработки могут быть разработаны для работы на персональных компьютерах, доступных через простые в использовании графические пользовательские интерфейсы.
В примере, показанном на рис. 44, маршрут, пройденный транспортным средством, показан в левой части экрана, а измерения, записанные во время работы, такие как скорость, разделенные на горизонтальные и вертикальные компоненты, показаны в правой части.
Постобработка обычно приводит к более точному и всеобъемлющему решению, чем это возможно в режиме реального времени.

Рис. 44
Какой метод коррекции лучше?
Как обсуждалось в начале этой главы, не существует лучшего метода коррекции ГНСС, а есть только тот метод, который лучше всего подходит для предполагаемого применения. На рис. 45 сравниваются точность и практический диапазон использования каждого из методов, обсуждаемых в этой главе. В следующих разделах сравниваются методы коррекции.

Рис. 45
DGNSS против RTK
Конфигурация дифференциальных систем ГНСС (DGNSS) и RTK схожа в том, что оба метода требуют установки приемника базовой станции в точке с известными координатами, подвижного приемника, который получает поправки от базовой станции, и канала связи между двумя приемниками. Разница в том, что RTK (метод измерения фазы несущей) значительно более точен, чем DGNSS (метод измерений на основе кода).
Преимущество DGNSS состоит в том, что он полезен на более длинной базовой линии (расстояние между базовой станцией и подвижным приемником), и система DGNSS менее дорога. Технологии, необходимые для достижения более высокой точности работы RTK, делают стоимость приемника с поддержкой RTK выше, чем стоимость приемника, поддерживающего только DGNSS.
SBAS против PPP
Система SBAS и система PPP похожи в том, что обе системы получают поправки через спутниковые каналы. Однако система PPP значительно точнее, чем система SBAS. Одной из причин повышенной точности является метод коррекции. Системы PPP используют метод измерения фазы несущей, а системы SBAS используют кодовый. Другая причина заключается в том, что услуги коррекции, обычно предлагаемые системами PPP на коммерческой основе, обеспечивают поправки более высокого качества и являются методами мультичастотными и многоканальными.
Преимущество систем SBAS заключается в том, что услуги коррекции бесплатны для всех. Хотя частные службы поправок обеспечивают более высокое качество коррекции и доступны во всем мире, для доступа к сигналам требуется платная подписка. Кроме того, поскольку SBAS — это метод, основанный на кодовых измерениях, нет никаких неоднозначностей, которые необходимо разрешить, и полная точность SBAS доступна почти сразу. Системам PPP требуется некоторое время для схождения (разрешения неоднозначности), прежде чем станет доступна полная точность.
DGNSS против SBAS
Хотя точность DGNSS и SBAS одинакова, оборудование, необходимое для систем, отличается.
Для системы SBAS требуется только приемник с функцией SBAS и антенна ГНСС. Система DGNSS требует приемника и антенны базовой станции, приемника и антенны подвижного приемника, а также канала связи между базовой станцией и подвижным приемником. Кроме того, DGNSS требует дополнительной настройки системы, поскольку базовая станция должна находиться в точке с известными координатами.
RTK против PPP
Подобно DGNSS и SBAS, RTK и PPP предлагают схожую точность, но необходимое оборудование и настройки различаются.
Система RTK предлагает более высокую точность и быструю инициализацию, но ее сложнее и дороже настроить. Для системы RTK требуются как минимум два приемника с поддержкой RTK (одна базовая станция и один или несколько подвижных приемников), антенна ГНСС для каждого приемника и канал связи между приемниками. Кроме того, для достижения высокого уровня точности базовая станция должна быть очень точно установлена в точке с известными координатами.
Система PPP имеет более простую конфигурацию; один приемник, совместимый с PPP, антенна, способная принимать частоты ГНСС и L-диапазон, и подписка от поставщика услуг коррекции. Однако PPP имеет несколько меньшую точность и большее время начальной сходимости.
Еще одним отличительным признаком является расстояние до базовой станции. Расстояние между базовой станцией и ровером (длина базовой линии) в системе RTK напрямую влияет на точность системы. При небольшой длине базовой линии, в несколько километров, RTK очень точен. Однако по мере увеличения длины базовой линии точность и возможность решения снижается. При большой длине базовой линии использование RTK невозможно. Поскольку PPP не использует базовую станцию, на него не влияет длина базовой линии, и он может обеспечить полную точность в любой точке мира.
Заключение
В этой главе описаны некоторые сложные принципы использования ГНСС. Если Вы хотите узнать больше, обратитесь к специалистам нашей компании.
Материалы взяты с сайта компании NovAtel. Ссылка на первоисточник: https://novatel.com/an-introduction-to-gnss