измерения кодовых ошибок и их влияние на параметры битовых ошибок; анализ цикловой и сверхцикловой структуры;
измерения параметров качества аналоговых сигналов, передаваемых в системе Е1.
Ниже мы рассмотрим описанные группы измерений более подробно. Но прежде остановим ся кратко на стандартах, регламентирующих нормы на параметры ошибок в цифровых системах передачи.
Основные стандарты норм на параметры ошибок в цифровых системах передачи
Параметр ошибки, обычно называемый BER (Bit Error Rate), представляет собой основной параметр измерения цифровых систем передачи и коммутации. Сложно указать область современ ных эксплуатационных измерений, где в той или иной степени не учитывался и не измерялся этот параметр. Именно поэтому необходимо уделить отдельное внимание нормам и методам измере ний этого параметра, нашедшим распространение в современной практике эксплуатации.
На теоретических аспектах измерений параметра BER и ему сопутствующих параметров (на пример, ES), здесь останавливаться не будем, им уделено достаточное внимание в [3]. Рассмот рим только основные стандарты, определяющие параметры и методы измерений ошибок в цифро вых системах передачи.
Для отечественных специалистов существенными можно считать четыре стандарта: три меж дународных, нашедших отражение в ITU-T G.821, G.826 и М.2100 соответственно, и один отечест венный стандарт, сформулированный в Приказе Госкомсвязи № 92 [9]. Последний во многом был создан на основе перечисленных рекомендаций ITU-T и является единственным документом, рег ламентирующим параметры паспортизации каналов систем передачи на сети общего пользования РФ. Рекомендации ITU-T можно условно разделить на долговременные нормы качества цифровых каналов (G.821 и G.826) и оперативные нормы (М.2100). Долговременные нормы ориентированы на анализ качества международных каналов и трактов и требуют долговременного мониторинга пара метров качества. Оперативные нормы более ориентированы на решение задач эксплуатации сис тем передачи и предусматривают кратковременные измерения. Долговременные нормы G.821 и G.826 разделяются по скоростям передачи: G.821 определяет нормы на параметры каналов ОЦК — 64 кбит/с, нормы на параметры качества цифровых систем передачи со скоростями выше 64 кбит/с определены в G.826. Для реальной практики необходимо представлять параметры всех че тырех стандартов, поскольку в зависимости от ситуации может применяться тот из них, который дает наиболее эффективный результат.
При рассмотрении измерений параметров ошибок в цифровых системах передачи возникает несколько важных вопросов, связанных с тем, что считать ошибкой в цифровом канале, как регист рировать ошибки и, наконец, как нормировать параметры качества цифровых систем передачи. Ряд проблем методологии, которые возникают при решении этих проблем, описаны в [3]. Здесь же остановимся на некоторых выводах, приведенных там же.
Во-первых, следует отметить, что существуют два метода измерений параметров ошибки: измерение параметров битовой ошибки (BER) и измерение параметров блоковых ошибок (BLER). Измерение параметров битовых ошибок требуют загрузки в канал тестовой последовательности (фиксированной тестовой последовательности или псевдослучайной — ПСП, PRBS) и сравнение последовательности на входе с последовательностью на выходе цифрового канала (синхронизация по тестовой последовательности). В результате измерений получается значение BER. Таким обра зом, измерение BER всегда делается с отключением цифрового канала от системы передачи. Ме тоды измерения блоковых ошибок связаны с использованием блоков данных. Единичной ошибкой здесь является одна или несколько ошибок в составе блока, таким образом, значения BER и BLER могут не совпадать. Измерения блоковых ошибок возможны в режиме без отключения канала в случае использования различных механизмов применения циклового избыточного кода (CRC) и т.п.
Во-вторых, при измерениях параметров ошибки разделяются два типа параметров: основные параметры ошибок и производные параметры. Основные параметры непосредственно связаны с фиксированием ошибок и количеством переданной информации (количество переданных битов или блоков, количество ошибочных битов или блоков, BER, BLER). Остальные параметры ошибок являются производными, т.е. они выводятся из основных по определенным алгоритмам. К ним от носятся параметры: секунд с ошибками, секунд, пораженных ошибками, минут деградации качест ва, секунд неготовности канала и т.д. Производные параметры не измеряются непосредственно, а вычисляются в процессе измерений по основным параметрам.
В-третьих, нормы параметров качества цифровых систем передачи, определенные перечис ленными выше стандартами, включают в себя в первую очередь перечень и значения производных параметров. Основные параметры не нормируются обычно как параметры качества. Тем не менее именно они являются наиболее важными при организации измерений. Вследствие этой ситуации появилось два подхода к измерениям параметров ошибки в цифровых системах передачи и описа

|
Измерение параметров выполняется согласно по |
||||
|
следовательности, представленной на рис. 3.13. |
||||
|
Измерения основаны на подсчете количества оши |
||||
|
бок. Первым шагом идет разделение всего времени про |
||||
|
UAS |
ведения измерений на время готовности и время него |
|||
|
товности канала, в результате выделяется параметр UAS. |
||||
|
Затем во время готовности канала производится подсчет |
||||
|
EFS |
секунд с ошибками ES, автоматически рассчитывается |
|||
|
параметр EFS. Для секунд с ошибками рассчитывается |
||||
|
параметр BER и вычисляется параметр SES. На основе |
||||
|
* |
SES |
анализа SES рассчитывается параметр DM. |
||
|
Нормы на все перечисленные параметры в зависи |
||||
|
мости от категорий качества цифрового канала и степени |
||||
|
соответствия гипотетической модели |
коммутируемого |
|||
|
соединения ISDN, а также методы пересчета параметров |
||||
|
составного цифрового канала ОЦК описаны в G.821 и |
||||
|
частично в [3]. |
||||
|
Рис. 3.13. Алгоритм измерения |
Основным недостатком методологии G.821 являет |
|||
|
ся необходимость ее расширения для |
определения па |
|||
|
параметров G.821 |
||||
|
раметров цифровых систем передачи со скоростями вы |
||||
ше 64 кбит/с. Тем не менее ее несомненным преимуще ством является простое интуитивно понятное разделение на время готовности и время неготовно сти канала. Битовые ошибки не считаются во время неготовности канала, так что оказывается воз можным разделить статистически возникающие ошибки от ошибок, возникающих вследствие до полнительных причин: проскальзываний, потерь сигнала и т.п.
В связи с этим при анализе систем Е1 методология G.821 с использованием тестовой по следовательности в одном или нескольких канальных интервалах получила широкое применение.
Как отмечалось выше, измерения в соответствии с методологией G.821 предусматривают от ключение канала и проведение измерений с использованием ПСП (для потока Е1 рекомендовано использование ПСП 215-1).
В этом случае существует три метода организации измерений, представленных ниже.
Рис. 3.14. Схема измерений параметров каналов цифровой системы передачи типа «точка-точка»
Наиболее простым способом измерений является измерение по схеме «точка-точка» (рис. 3.14). Для измерения необходимы два анализатора потока Е1, включенные по схеме с отключением ка нала, один в качестве генератора тестовой последовательности, другой — анализатора параметров цифрового канала. Генератор тестовой последовательности посылает в сеть по заданному каналу поток Е1, этот поток проходит через первичную сеть и приходит на анализатор-приемник. Синхро низация тестовой последовательности обеспечивает проведение измерений физического и ка нального уровней. Для тестирования может использоваться весь поток Е1.
На рис. 3.14 представлены результаты измерений параметров ошибки по G.821 анализато ром VICTOR (экран слева). В приведенном примере измеряются параметры ES, SES, DM, US, AS, AT, ET. Помимо измерений параметров ошибки, в процессе тестирования цифровых каналов акту ально проведение стрессового тестирования, параметры которого представлены на экране справа. При проведении измерений канального уровня существенны следующие варианты стрессового воздействия:
•внесение битовой (EBIT) или кодовой (ECOD) ошибок;
имитация проскальзываний в цифровой системе передачи (более подробнее мы будем рас сматривать эти вопросы в главе о системах синхронизации): +SLP и —SLR;
имитация сигналов о неисправностях (LSS);
имитация неисправностей в линейном сигнале — генерация длинных последовательностей ну лей (ALL0) или единиц (ALL1).
Впроцессе стрессового тестирования анализируется реакция системы передачи на оказы ваемое воздействие:
•стабильность и скорость восстановления цикловой и сверхцикловой синхронизации;
возникновение в цифровой системе передачи ошибок CRC и генерация сигналов о неисправ ности;
реакция встроенных средств самодиагностики (сенсоров) на имитируемые ситуации в системе передачи, фиксирование неисправностей системой управления первичной сети.
Существенным недостатком описанной схемы является необходимость использования в из мерении двух анализаторов.
Рис. 3.15. Схема шлейфовых измерений параметров каналов цифровой системы передачи
|
Разновидностью схемы рис. 3.15 |
MUX |
||||
|
является |
схема |
с |
использованием |
||
|
включения анализатора в разрыв (ре |
|||||
|
жим THROUGH или Drop&lnsert), пред |
|||||
|
ставленная на рис.3.16. В этом случае |
|||||
|
для тестирования могут использовать |
|||||
|
ся несколько TS в составе потока Е1, |
|||||
|
где передается |
ПСП. |
Существенным |
|||
|
преимуществом такой схемы является |
|||||
|
возможность проведения измерений |
|||||
|
параметров ошибок по битам без |
|||||
|
полного |
отключения |
канала. Каналь |
|||
|
ные интервалы, не используемые для |
|||||
|
передачи |
ПСП, |
могут |
использоваться |
||
|
в сети для передачи трафика. |
Этот недостаток устраняется при проведении шлейфовых измерений по схеме, представленной на рис. 3.15. Для измерений устанавливается шлейф че рез цифровую первичную сеть. Анализа тор при этом является одновременно генератором потока Е1. Недостатком схемы является необходимость исполь зования двух цифровых каналов связи для проведения измерений вместо од ного. Кроме того, результаты измерений зависят от параметров обоих измеряе мых каналов, что затрудняет локализа цию участков деградации качества.
DEMUX
Параметры ошибок и методы их измерений по G.826
Методология рекомендации G.826,
|
опубликованной впервые в 1993 г., явля |
Рис. 3.16. Схема включения в разрыв с использовани |
|
ется развитием методологии G.821 и учи |
ем шлейфа по нескольким ОЦК |
|
тывает ее недостатки. Основными прин |
|
|
ципами методологии являются: |
применимость к цифровым системам передачи со скоростями выше 64 кбит/с;
учет основных скоростей передачи, используемых в современных цифровых системах PDH;
возможность измерений без отключения канала — ориентация на эксплуатационные измерения работающих систем.
Основным отличием методологии измерений по G.826 относительно G.821 является переход от измерений ошибок по битам к измерениям ошибок по блокам. В качестве блока может исполь зоваться либо блок ПСП, либо цикл. В первом случае измерения должны проводится с отключени ем канала с использованием схем, описанных выше. В последнем случае блоковыми ошибками являются ошибки по CRC, и измерения могут проводится по схеме пассивного мониторинга циф рового канала.
Согласно G.826 предусмотрено измерение следующих параметров: ЕВ, ES, SES, ВВЕ, ESR, SESR, BBER. В отличии от методологии G.821 в G.826 не измеряется параметр DM, зато появляет ся новый параметр — измерение количества блоков с фоновой ошибкой (ВВЕ). Уже известные па раметры ES, SES, ESR и SESR в G.826 имеют другую интерпретацию, связанную с методологией измерения блоковых ошибок. Важной особенностью измерений по методологии G.826 является неявное определение времени неготовности канала. Основные параметры измерений по G.826 описаны детально в [3] и делятся на две группы: основные и производные параметры (табл. 3.2).
Таблица 3.2. Параметры, измеряемые согласно методологии G.826
|
Основные параметры |
Производные параметры, используемые в G.826 |
|
ЕВ, BLOCKS, BLER, ЕТ |
UAS(%), AS(%), ES(%), SES(%), ESR, SESR, BBE, BBER |
Алгоритм измерения параметров согласно методологии G.826 представлен на рис. 3.17 Согласно рекомендациям G.821 и G.826 определяется время проведения измерений — 30
дней. Этот период обеспечивает корректную объективацию результатов измерения, включая спе цифические особенности радиочастотных цифровых систем передачи. На практике, однако, изме рения в течении такого длительного пе риода проводятся довольно редко.
Обычно для эксплуатационных измере ний считается достаточным для объек тивации проведение измерений в тече нии 24 часов, что определено в М.2100.
Как следует из методологии по G.826, в основе измерений лежит ана лиз BLER и параметров блоковых оши бок. В результате, помимо описанных выше (рис. 3.14-3.16) схем организации измерений, при организации измерений получила распространение методика пассивного мониторинга цифровых ка налов, представленная на рис. 3.18. В этом случае анализатор подключается к системе передачи по высокоомному со
Рис. 3.17. Алгоритм измерения параметров по G.826 единению, аналогичному рис. 3.26. На рис. 3.18 показан также пример отобра
жения результатов измерений парамет ров ошибки по G.826/M.2100. Все параметры измеряются как на ближнем конце (Near end), так и на удаленном (Far end). В число параметров измерений включаются параметры ES, SES и US, еди ные для методологии G.826 и М.2100, а также параметры ВВЕ и АВЕ, относящиеся к методологии G.826 и не измеряемые в методологии М.2100.
Особенности методологии по М .2100
Методология М.2100/М.2101 была разработана с целью расширения методики G.821/G.826 для целей эксплуатации. Отличительной особенностью методик М.2100/М.2101 является ориента ция на индикационные измерения, когда в качестве результатов измерения делается вывод о прохождении/не прохождении теста, а не получаются количественные величины параметров. В качест ве основных параметров для измерений были выбраны параметры SES и ES.
Рекомендация М.2100 была впервые опубликована в 1993 г. и определила параметры поро говых значений для проведения измерений для цифровых систем передачи PDH. Развитие техно логии цифровой первичной сети и внедрение технологии SDH привело к необходимости доработки
From Wikipedia, the free encyclopedia
In digital transmission, the number of bit errors is the numbers of received bits of a data stream over a communication channel that have been altered due to noise, interference, distortion or bit synchronization errors.
The bit error rate (BER) is the number of bit errors per unit time. The bit error ratio (also BER) is the number of bit errors divided by the total number of transferred bits during a studied time interval. Bit error ratio is a unitless performance measure, often expressed as a percentage.[1]
The bit error probability pe is the expected value of the bit error ratio. The bit error ratio can be considered as an approximate estimate of the bit error probability. This estimate is accurate for a long time interval and a high number of bit errors.
Example[edit]
As an example, assume this transmitted bit sequence:
1 1 0 0 0 1 0 1 1
and the following received bit sequence:
0 1 0 1 0 1 0 0 1,
The number of bit errors (the underlined bits) is, in this case, 3. The BER is 3 incorrect bits divided by 9 transferred bits, resulting in a BER of 0.333 or 33.3%.
Packet error ratio[edit]
The packet error ratio (PER) is the number of incorrectly received data packets divided by the total number of received packets. A packet is declared incorrect if at least one bit is erroneous. The expectation value of the PER is denoted packet error probability pp, which for a data packet length of N bits can be expressed as
 ,
,

assuming that the bit errors are independent of each other. For small bit error probabilities and large data packets, this is approximately

Similar measurements can be carried out for the transmission of frames, blocks, or symbols.
The above expression can be rearranged to express the corresponding BER (pe) as a function of the PER (pp) and the data packet length N in bits:
![{\displaystyle p_{e}=1-{\sqrt[{N}]{(1-p_{p})}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f5d380e45b0451c45265e199221fae5bd5b84bf9)
Factors affecting the BER[edit]
In a communication system, the receiver side BER may be affected by transmission channel noise, interference, distortion, bit synchronization problems, attenuation, wireless multipath fading, etc.
The BER may be improved by choosing a strong signal strength (unless this causes cross-talk and more bit errors), by choosing a slow and robust modulation scheme or line coding scheme, and by applying channel coding schemes such as redundant forward error correction codes.
The transmission BER is the number of detected bits that are incorrect before error correction, divided by the total number of transferred bits (including redundant error codes). The information BER, approximately equal to the decoding error probability, is the number of decoded bits that remain incorrect after the error correction, divided by the total number of decoded bits (the useful information). Normally the transmission BER is larger than the information BER. The information BER is affected by the strength of the forward error correction code.
Analysis of the BER[edit]
The BER may be evaluated using stochastic (Monte Carlo) computer simulations. If a simple transmission channel model and data source model is assumed, the BER may also be calculated analytically. An example of such a data source model is the Bernoulli source.
Examples of simple channel models used in information theory are:
- Binary symmetric channel (used in analysis of decoding error probability in case of non-bursty bit errors on the transmission channel)
- Additive white Gaussian noise (AWGN) channel without fading.
A worst-case scenario is a completely random channel, where noise totally dominates over the useful signal. This results in a transmission BER of 50% (provided that a Bernoulli binary data source and a binary symmetrical channel are assumed, see below).
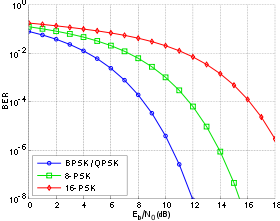

In a noisy channel, the BER is often expressed as a function of the normalized carrier-to-noise ratio measure denoted Eb/N0, (energy per bit to noise power spectral density ratio), or Es/N0 (energy per modulation symbol to noise spectral density).
For example, in the case of QPSK modulation and AWGN channel, the BER as function of the Eb/N0 is given by:
 .[2]
.[2]
People usually plot the BER curves to describe the performance of a digital communication system. In optical communication, BER(dB) vs. Received Power(dBm) is usually used; while in wireless communication, BER(dB) vs. SNR(dB) is used.
Measuring the bit error ratio helps people choose the appropriate forward error correction codes. Since most such codes correct only bit-flips, but not bit-insertions or bit-deletions, the Hamming distance metric is the appropriate way to measure the number of bit errors. Many FEC coders also continuously measure the current BER.
A more general way of measuring the number of bit errors is the Levenshtein distance.
The Levenshtein distance measurement is more appropriate for measuring raw channel performance before frame synchronization, and when using error correction codes designed to correct bit-insertions and bit-deletions, such as Marker Codes and Watermark Codes.[3]
Mathematical draft[edit]
The BER is the likelihood of a bit misinterpretation due to electrical noise  . Considering a bipolar NRZ transmission, we have
. Considering a bipolar NRZ transmission, we have
 for a «1» and
for a «1» and  for a «0». Each of
for a «0». Each of  and
and  has a period of
has a period of  .
.
Knowing that the noise has a bilateral spectral density  ,
,
is 
and is  .
.
Returning to BER, we have the likelihood of a bit misinterpretation  .
.
 and
and 
where  is the threshold of decision, set to 0 when
is the threshold of decision, set to 0 when  .
.
We can use the average energy of the signal  to find the final expression :
to find the final expression :

±§
Bit error rate test[edit]
BERT or bit error rate test is a testing method for digital communication circuits that uses predetermined stress patterns consisting of a sequence of logical ones and zeros generated by a test pattern generator.
A BERT typically consists of a test pattern generator and a receiver that can be set to the same pattern. They can be used in pairs, with one at either end of a transmission link, or singularly at one end with a loopback at the remote end. BERTs are typically stand-alone specialised instruments, but can be personal computer–based. In use, the number of errors, if any, are counted and presented as a ratio such as 1 in 1,000,000, or 1 in 1e06.
Common types of BERT stress patterns[edit]
- PRBS (pseudorandom binary sequence) – A pseudorandom binary sequencer of N Bits. These pattern sequences are used to measure jitter and eye mask of TX-Data in electrical and optical data links.
- QRSS (quasi random signal source) – A pseudorandom binary sequencer which generates every combination of a 20-bit word, repeats every 1,048,575 words, and suppresses consecutive zeros to no more than 14. It contains high-density sequences, low-density sequences, and sequences that change from low to high and vice versa. This pattern is also the standard pattern used to measure jitter.
- 3 in 24 – Pattern contains the longest string of consecutive zeros (15) with the lowest ones density (12.5%). This pattern simultaneously stresses minimum ones density and the maximum number of consecutive zeros. The D4 frame format of 3 in 24 may cause a D4 yellow alarm for frame circuits depending on the alignment of one bits to a frame.
- 1:7 – Also referred to as 1 in 8. It has only a single one in an eight-bit repeating sequence. This pattern stresses the minimum ones density of 12.5% and should be used when testing facilities set for B8ZS coding as the 3 in 24 pattern increases to 29.5% when converted to B8ZS.
- Min/max – Pattern rapid sequence changes from low density to high density. Most useful when stressing the repeater’s ALBO feature.
- All ones (or mark) – A pattern composed of ones only. This pattern causes the repeater to consume the maximum amount of power. If DC to the repeater is regulated properly, the repeater will have no trouble transmitting the long ones sequence. This pattern should be used when measuring span power regulation. An unframed all ones pattern is used to indicate an AIS (also known as a blue alarm).
- All zeros – A pattern composed of zeros only. It is effective in finding equipment misoptioned for AMI, such as fiber/radio multiplex low-speed inputs.
- Alternating 0s and 1s — A pattern composed of alternating ones and zeroes.
- 2 in 8 – Pattern contains a maximum of four consecutive zeros. It will not invoke a B8ZS sequence because eight consecutive zeros are required to cause a B8ZS substitution. The pattern is effective in finding equipment misoptioned for B8ZS.
- Bridgetap — Bridge taps within a span can be detected by employing a number of test patterns with a variety of ones and zeros densities. This test generates 21 test patterns and runs for 15 minutes. If a signal error occurs, the span may have one or more bridge taps. This pattern is only effective for T1 spans that transmit the signal raw. Modulation used in HDSL spans negates the bridgetap patterns’ ability to uncover bridge taps.
- Multipat — This test generates five commonly used test patterns to allow DS1 span testing without having to select each test pattern individually. Patterns are: all ones, 1:7, 2 in 8, 3 in 24, and QRSS.
- T1-DALY and 55 OCTET — Each of these patterns contain fifty-five (55), eight bit octets of data in a sequence that changes rapidly between low and high density. These patterns are used primarily to stress the ALBO and equalizer circuitry but they will also stress timing recovery. 55 OCTET has fifteen (15) consecutive zeroes and can only be used unframed without violating one’s density requirements. For framed signals, the T1-DALY pattern should be used. Both patterns will force a B8ZS code in circuits optioned for B8ZS.
Bit error rate tester[edit]
A bit error rate tester (BERT), also known as a «bit error ratio tester»[4] or bit error rate test solution (BERTs) is electronic test equipment used to test the quality of signal transmission of single components or complete systems.
The main building blocks of a BERT are:
- Pattern generator, which transmits a defined test pattern to the DUT or test system
- Error detector connected to the DUT or test system, to count the errors generated by the DUT or test system
- Clock signal generator to synchronize the pattern generator and the error detector
- Digital communication analyser is optional to display the transmitted or received signal
- Electrical-optical converter and optical-electrical converter for testing optical communication signals
See also[edit]
- Burst error
- Error correction code
- Errored second
- Pseudo bit error ratio
- Viterbi Error Rate
References[edit]
- ^ Jit Lim (14 December 2010). «Is BER the bit error ratio or the bit error rate?». EDN. Retrieved 2015-02-16.
- ^
Digital Communications, John Proakis, Massoud Salehi, McGraw-Hill Education, Nov 6, 2007 - ^
«Keyboards and Covert Channels»
by Gaurav Shah, Andres Molina, and Matt Blaze (2006?) - ^ «Bit Error Rate Testing: BER Test BERT » Electronics Notes». www.electronics-notes.com. Retrieved 2020-04-11.
![]() This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
External links[edit]
- QPSK BER for AWGN channel – online experiment
Как было показано в предыдущем выпуске рубрики, коэффициент битовых ошибок BER является ключевым параметром оценки качества цифровых систем передачи (ЦСП). Этот параметр незаменим при проверке цифровой аппаратуры (например, регенераторов) на этапе ее разработки и ремонта, когда оборудование выведено из эксплуатации. А что же делать, когда цифровые каналы и тракты требуется протестировать в процессе их нормальной эксплуатации?
У параметра BER есть и другой существенный недостаток: этот показатель практически невозможно использовать для оценки качества цифровой линии. При заказе любой услуги связи пользователь и провайдер должны заключить соглашение о качестве обслуживания (Service Level Agreement, SLA), где четко оговариваются двусторонние обязательства. Для оценки качества сеанса связи в цифровом канале или тракте логично использовать относительное число ошибок передачи за фиксированные интервалы времени — за секунду или за период передачи фиксированной группы битов, которую называют блоком.
Именно эти показатели положены в основу двух базовых рекомендаций ITU-T — G.821 и G.826, о которых мы и поговорим ниже. В этом году исполнилось четверть века с момента принятия рекомендации G.821 «Параметры ошибок международного цифрового соединения сети ISDN на скорости ниже первичной».
Первой сетью, где соединение между двумя пользователями было полностью цифровым, была сеть ISDN. Первичными скоростями ISDN являются скорости сигналов Т-1 и Е-1, равные 1544 и 2048 Кбит/c, соответственно. Ниже первичной стандартом предусматриваются скорости 64xN, где 64 Кбит/c представляет собой пропускную способность основного (или базового) цифрового канала (ОЦК), а N < 24 в случае Т-1 и N < 31 в случае Е-1.
В рекомендации G.821 в качестве параметра ошибок цифрового соединения выбраны два следующих.
- Число секунд с ошибками (Errored Second, ES), к которым относится каждая секунда, в которой имеется по крайней мере одна ошибка. Как следует из определения, при таком подходе одиночная ошибка и пакет ошибок не различаются.
- Число секунд с многочисленными ошибками (Severely Errored Second, SES), где SES означает секунду с коэффициентом ошибок ≥ 10-3.
Поскольку оба параметра — и ES, и SES — зависят от времени измерения T, для практической оценки качества цифрового соединения применяют их относительные значения: Errored Second Ratio ESR =ES/T и Severely Errored Second Ratio SESR = SES/T.
Заметим, что наличие двух параметров оценки ошибок позволяет не только более точно определить качество цифрового соединения, но и во многих случаях оказывается полезным при локализации возможных повреждений.
По мере распространения широкополосных услуг связи рамки использования рекомендации G. 821 становились все более узкими. Попытки же приспособить ее для измерения широкополосных цифровых трактов оказались неудачными. Кроме того, определение параметров качества в G.821 основывается на оценке битовых ошибок, а те, в свою очередь, могут быть точно определены лишь тогда, когда достоверно известна измеряемая цифровая последовательность. Поэтому тестирование в соответствии с G.821 возможно только при выводе цифрового соединения из эксплуатации.
Таким образом, специалисты нуждались в новой рекомендации, где учитывались бы реалии цифровых сетей связи, включая потребность тестирования канала связи в рабочем режиме, в том числе и в цифровых соединениях с применением оборудования синхронной цифровой иерархии SDH и асинхронной передачи АТМ.
Всем этим требованиям отвечает рекомендация G.826 «Параметры и нормы ошибок международных цифровых соединений на скорости выше первичной», одобренная ITU-T в 1993 г. Она обеспечила решение трех главных задач по организации тестирования ошибок цифровых соединений:
- во время нормальной эксплуатации;
- на скоростях 1544 Кбит/c, 2048 Кбит/c и выше;
- в сетях с использованием технологий SDH и АТМ.
Первая задача была решена путем перехода от тестирования ошибок по битам к тестированию ошибок по блокам. Напомним, блок представляет собой группу последовательных битов, которые относятся к исследуемому цифровому тракту. Каждый бит принадлежит к определенному блоку. Контроль блоков выполняется с помощью встроенных в системы передачи специальных устройств, применение которых гарантирует обнаружение ошибки с надежностью не ниже 90%.
Ошибки цифрового сигнала могут быть обнаружены множеством способов без перерыва связи. О недостатках двух из них — методах обнаружения ошибок кода передачи и циклового синхросигнала в цикле сигнала E-1 — мы уже упоминали (см. статью «Измерения в цифровых системах связи» в сентябрьском номере «Журнала сетевых решений/LAN» за этот год). Их ограничения состоят, прежде всего, в частном характере и недостаточной точности. Между тем важнейшими требованиями к методам обнаружения ошибок цифрового сигнала являются универсальность, экономичность и точность. Универсальность означает применимость метода к любому цифровому сигналу, экономичность — эффективное использование дополнительной пропускной способности, ключевое же требование — несомненно, высокая точность.
Среди множества известных способов блочного контроля ошибок трем указанным требованиям наиболее полно удовлетворяет метод циклического контроля по избыточности (Cyclic Redundancy Code, CRC).
Метод CRC основан на делении и умножении многочленов. При этом делимый многочлен представляет собой последовательную запись блока данных в двоичной форме. Например, в системе Е-1 блок данных, для которого рассчитывается CRC, состоит из 256 байт. Поэтому делимое записывается как двоичное число длиной 2048 бит, которое по особому правилу делится на выбираемый так называемый порождающий многочлен. Полученный остаток используется в качестве контрольной информации и передается по каналу связи вместе с информационным сигналом.
Аналогичная обработка полученного блока данных выполняется на принимающей стороне, и остаток деления многочленов сравнивается с переданным остатком. Различие указанных остаточных многочленов является признаком ошибки в цифровом сигнале.
В рекомендации G.826 определены три типа блочных ошибок:
- секунда с ошибками (Errored Second, ES), содержащая хотя бы один блок с ошибками или дефект;
- секунда c многочисленными ошибками (Severely Errored Second, SES), содержащая ≥ 30% блоков с ошибками или, по крайней мере, один период с серьезными нарушениями соединения (Severely Disturbed Period, SDP);
- блок с фоновой ошибкой (Background Block Error, BBE) — блок с ошибками вне отмеченных ошибками секунд (SES).
При измерениях во время нормальной эксплуатации SDP наблюдаются, если появляются так называемые дефекты, по-разному определяемые в плезиохронных (PDH) и синхронных (SDH) системах, а также при асинхронной передаче (АТМ). К этой категории принадлежат пропадание сигнала (Loss of Signal, LOS), потеря цикловой синхронизации (Loss of Frame, LOF) или прием сигнала индикации аварийного состояния (Alarm Indication Signal, AIS). При измерениях с выводом из эксплуатации опознается SDP, если частота ошибок в течение времени тестирования составляет ≥ 10-2.
В рекомендации G.826, как и в G.821В, применяются три относительных параметра блочных ошибок:
- коэффициент секунд с блочными ошибками (Errored Second Ratio, ESR), равный отношению секунд с блочными ошибками к общему числу секунд измерения;
- коэффициент секунд с сильными блочными ошибками (Severely Errored Second Ratio, SESR), равный отношению секунд c сильными блочными ошибками к общему числу секунд измерения;
- коэффициент блоков с фоновыми ошибками (Background Block Error Ratio, BBER), равный отношению блоков с ошибками к общему числу блоков в сеансе измерения, причем при расчете BBER все блоки из интервалов с сильными ошибками исключаются.
Нужно иметь в виду, что при расчете всех трех параметров учитывается только время, в течение которого система передачи находится в состоянии готовности.
Параметр готовности цифрового соединения обязательно включается в SLA.
Система считается неготовой с того момента времени, после которого имеют место 10 последовательных секунд с сильными ошибками SES. Согласно тому же определению, система передачи вновь возвращается в состояние готовности, если по крайней мере в течение 10 последовательных секунд ошибок не наблюдается или это ошибки SES.
Нормированный показатель готовности системы представляет собой отношение времени ее готовности к общему времени работы. Реальные значения показателя надежности системы составляют 99,5%. Если в аналоговых системах передачи (АСП) мощность помех в каналах пропорциональна длине соединения, то в ЦСП существует линейная зависимость числа ошибок от длины соеди-нения. Поэтому при расчете ошибок в ЦСП, как и при расчете шумов в АСП, используется принцип гипотетической эталонной цепи (Hypothetical Reference Path, HRP).
Эталонные цепи в соответствии с рекомендациями G.821 и G.826 имеют протяженность 27 500 км и описывают распределение показателей ошибок вдоль международного цифрового соединения. Обе цепи отражают особенности нормирования показателей ошибок, утвержденные в указанных рекомендациях.
Игорь Иванцов — менеджер отдела «Инструменты и приборы для монтажа и обслуживания телекоммуникационных систем» компании «СвязьКомплект». С ним можно связаться по тел. (095) 362-7787, по адресам: info@skomplekt.com, www.skomplekt.com.
Что такое BER — Bit Error Rate?
Date:2016/4/5 15:56:57 Hits:
«Коэффициент ошибок по битам, BER используется для количественной оценки канала, несущего данные, путем подсчета частоты ошибок в строке данных. Он используется в телекоммуникациях, сетях и радиосистемах.Коэффициент битовых ошибок, BER — ключевой параметр, который используется при оценке систем, передающих цифровые данные из одного места в другое «. — Fmuser
Системы, для которых коэффициент битовых ошибок, BER применима включают ссылки радио данных, а также информационных систем волоконно-оптические, Ethernet, или любую систему, которая передает данные по сети той или иной форме, где шум, помехи, и дрожание фазы может вызвать ухудшение цифрового сигнал.Хотя есть некоторые различия в том, как эти системы работают и каким образом влияет скорость передачи в битах ошибки, основы скорости битовых ошибок сама по-прежнему то же самое.
Когда данные передаются по каналу передачи данных, существует вероятность ошибок, вводимых в систему. Если ошибки вводятся в данных, то целостность системы может быть поставлена под угрозу. В результате, необходимо оценить производительность системы, и коэффициент ошибок в битах, BER, обеспечивает идеальный способ, в котором это может быть достигнуто.
В отличие от многих других форм оценки, частота ошибок по битам, КОБ оценивает полный впритык производительность системы, включающей передатчик, приемник и среды между ними. Таким образом, частота появления ошибочных битов, КОБ позволяет реальная производительность системы в эксплуатацию, подлежащих испытанию, а не проверки составных частей и в надежде, что они будут работать удовлетворительно, когда на месте.
Бит ошибки скорости определения BER и основы
Как следует из названия, частота ошибочных битов определяется как скорость, при которой возникают ошибки в системе передачи. Это может быть непосредственно переведены в число ошибок, возникающих в строке заявленным количеством битов. Определение частоты появления ошибочных битов может быть переведена в простую формулу:
Если среда между передатчиком и приемником хорошо и соотношение сигнал-шум является высоким, то скорость битовых ошибок будет очень мала — возможно, незначительны и не имеющие какого-либо заметного влияния на общую систему Однако, если шум может быть обнаружен, то есть вероятность того, что частота появления ошибочных битов нужно будет рассмотреть.
Основными причинами деградации канала передачи данных и соответствующей частоты ошибок передачи в битах, BER шум и изменения в пути распространения (где используются сигнальные пути радио). Оба эффекта имеют случайный элемент к ним, шум следующий гауссовой функции вероятности в то время как модель распространения следует модели Рэлея. Это означает, что анализ характеристик канала, как правило, проводится с использованием методов статистического анализа.
Для волоконно-оптических систем, битовых ошибок в основном являются результатом несовершенства используемых компонентов, чтобы сделать ссылку. Они включают в себя оптический драйвер, приемник, разъемы и самого волокна. Ошибки в битах также могут быть введены в результате оптической дисперсии и затухания, которые могут присутствовать. Также шум может быть введен в самом оптическом приемнике. Как правило, они могут быть фотодиоды и усилители, которые должны реагировать на очень маленьких изменений, и в результате может быть высокий уровень шума, который присутствует.
Другим фактором, способствующим для битовых ошибок является любой Дрожание фазы, которые могут присутствовать в системе, так как это может изменить выборку данных Теа.
BER и Eb / No
Отношение сигнал-шум и Eb / No цифры не являются параметрами, которые в большей степени связаны с радиолиний и систем радиосвязи. С точки зрения этого, частота появления ошибочных битов, BER, также может быть определена в терминах вероятности ошибки или POE. Определения этого используются три других переменных. Они являются функция ошибки, ERF, энергия в один бит, ЭБ, и спектральная плотность мощности шума (что мощность шума в полосе частот Гц 1), №
Следует отметить, что каждый тип модуляции имеет свое собственное значение функции ошибки. Это происходит потому, что каждый тип модуляции выполняет по-разному в присутствии шума. В частности, схемы более высокого порядка модуляции (к примеру 64QAM и т.д.), которые способны переносить более высокие скорости передачи данных, не столь надежными в присутствии шума. Меньшие форматы модуляции порядка (например, BPSK, QPSK и т.д.) предлагают более низкие скорости передачи данных, но являются более надежными.
Энергии на бит, ЭБ, может быть определена путем деления мощности несущей на скорости передачи данных и является мерой энергии с размерами джоулей. Нет это мощность на герц, и поэтому это имеет размерность мощности (джоулей в секунду), разделенное на секунды). Не Глядя на размеры отношение Eb / No все размеры компенсируют дать безразмерное отношение. Важно отметить, что РОЕ пропорционально Eb / No и является формой сигнала к шуму.
Факторы, влияющие на частоту появления ошибочных битов BER,
Это можно видеть из использования Eb / No, что частоты появления ошибочных битов, КОБ может зависеть от ряда факторов. Изменяя переменные, которыми можно управлять, можно оптимизировать систему, чтобы обеспечить уровень производительности, которые необходимы. Это, как правило, проводится в стадии проектирования системы передачи данных таким образом, что рабочие параметры могут быть скорректированы на начальных этапах проектирования концепции.
• Помехи: Уровни помех, присутствующих в системе, как правило, установлены под воздействием внешних факторов и не может быть изменен с помощью конструкции системы. Тем не менее, можно установить ширину полосы пропускания системы. За счет снижения пропускной способности уровень помех может быть уменьшено. Однако уменьшение полосы пропускания ограничивает пропускную способность данных, что может быть достигнуто.
• Увеличьте мощность передатчика: Кроме того, можно повысить уровень мощности системы таким образом, чтобы мощность на бит увеличивается. Это должно быть сбалансировано против факторов, включая уровни помех другим пользователям и влияние увеличения выходной мощности от размера усилителя мощности и общее энергопотребление и время автономной работы и т.д.
• Модуляция низшего порядка: схемы модуляции Низшие порядка могут быть использованы, но это за счет скорости передачи данных.
• Уменьшите пропускную способность: Другой подход, который может быть принят, чтобы уменьшить частоту появления ошибочных битов, чтобы уменьшить ширину полосы частот. Более низкие уровни шума будут получены, и, следовательно, соотношение сигнал-шум улучшится. Опять же это приводит к уменьшению пропускной способности данных достижимым.
Необходимо сбалансировать все имеющиеся факторы для достижения удовлетворительной скорости появления ошибочных битов. Обычно это не представляется возможным достичь всех требований и некоторые компромиссы необходимы. Тем не менее, даже с битовой частотой ошибок ниже того, что в идеале требуется, дополнительные компромиссы могут быть сделаны с точки зрения уровней коррекции ошибок, которые вводятся в передаваемые данные. Хотя более избыточные данные должны быть отправлены с более высокими уровнями коррекции ошибок, это может помочь замаскировать последствия любых битовых ошибок, которые возникают, тем самым улучшая общую частоту появления ошибок в битах.
Частота появления ошибочных битов BER является параметром, который дает прекрасную индикацию производительности линии передачи данных, таких как радио или волоконно-оптической системы. В качестве одного из основных параметров, представляющих интерес в любой линии передачи данных является количество ошибок, которые возникают, то коэффициент ошибок в битах является ключевым параметром. Знание BER также позволяет использовать другие особенности ссылки, такие как мощность и пропускную способность, и т.д., чтобы быть адаптированы для того, чтобы требуемые эксплуатационные характеристики, которые будут получены.