The model voltage error refers to the voltage difference between the model and the real voltage when the predetermined SOC is accurate.
From: Journal of Power Sources, 2018
Analog Integrated Circuits
Peter Wilson, in The Circuit Designer’s Companion (Fourth Edition), 2017
Power Supply Rejection Ratio
PSRR is similar to CMRR but relates to error voltages referred to the input as a result of changes in the power rail voltages. As before, a PSRR of 80 dB with a rail voltage change of 1 V would result in an equivalent input error of 100 μV. Again, PSRR worsens with increasing frequency and may be only 20–30 dB in the tens-to-hundreds of kilohertz range, so that high-frequency noise on the power rails is easily reflected on the output. There may also be a difference of several tens of decibels between the PSRRs of the positive and negative supply rails, due to the difference in internal biasing arrangements. For this reason, it is unwise to expect equal but antiphase power rail signals, such as mains frequency ripple, to cancel each other out.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780081017647000050
Analog integrated circuits
Peter Wilson, in The Circuit Designer’s Companion (Third Edition), 2012
PSRR
Power supply rejection is similar to CMRR but relates to error voltages referred to the input as a result of changes in the power rail voltages. As before, a PSRR of 80 dB with a rail voltage change of 1 V would result in an equivalent input error of 100 μV. Again, PSRR worsens with increasing frequency and may be only 20−30 dB in the tens-to-hundreds of kiloHertz range, so that high-frequency noise on the power rails is easily reflected on the output. There may also be a difference of several tens of dB between the PSRRs of the positive and negative supply rails, due to the difference in internal biasing arrangements. For this reason it is unwise to expect equal but anti-phase power rail signals, such as mains frequency ripple, to cancel each other out.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780080971384000057
Modeling Error Sources: High-Speed A/D Specifications
Michael J. Demler, in High-Speed Analog-to-Digital Conversion, 1991
Signal-to-Noise Ratio
In the process of quantizing a dynamic signal, the error voltage waveform that is generated, as in Fig. 3-3, represents a noise source which corrupts the digital representation of the input signal. The RMS (root-mean squared) amplitude of this error can be easily derived. First, the size of each quantization level, equal to VFS/2N, will be designated as having an amplitude of q. In the ideal A/D all quantization levels are equal and spaced exactly at 1-LSB intervals. If the error signal is generated by a ramp input signal, a uniform distribution of codes results in the sawtooth with a periodicity which is designated as T. The error signal is then described by
υet=qtT−T/2T/2
The RMS value of this function can be calculated with the following standard equations:
(3-5)υe2¯=1/T∫−T/2T/2qt/T2dt=q2T3t33−T/2T/2=q23T3T38+T38υe2¯=q212υe,RMS=q12=q23
If a sine wave with a peak-to-peak amplitude equal to the A/D full-scale voltage is used as an input signal, its RMS voltage would be
Vin,RMS=2Nq22
The RMS-to-RMS signal-to-noise ratio (SNR) for the ideal A/D is then given by
SNR=20log2Nq/22q/12=20Nlog2+log12−log22=6.02N+10.79−9.03SNRRMS=6.02N+1.76
This the well-known equation which relates ideal SNR to the A/D resolution. It should be intuitive that an increase in resolution reduces the error amplitude by a factor of two per bit, resulting in an increase in SNR of 6 dB per bit.
To develop a model for the RMS quantization noise in a real A/D, the example with alternating long and short codes depicted in Fig. 3-6 is used. For such a characteristic, the noise introduced by the long and short codes is at first considered separately. The error voltage from a quantization level with DLE of +12LSB is described as
υlogt=qtT−3T/43T/4
The ramp extends over a quantization period equivalent to 112 LSBs. Similarly, for the short codes the error extends over a period of 12LSB:
υshortt=qtT−1T/41T/4
The squared error for the long codes is
υel2¯=23T∫−3T/43T/4qt/T2dt=2q23T3t33−3T/43T/4υel2¯=3q216υel,RMS=3q4=34q3
The final result shows that the RMS noise contributed by a code that is 50% longer than the ideal is 50% larger than the amount shown in Eq. (3-5). Similar equations for the short codes are as follows:
υes2¯=2T∫−T/4T/4qt/T2dt=2q2T3t33−T/4T/4υes2¯=q248υes,RMS=q43
The noise generated by a code that is 50% short is half the noise that results from an ideal quantization level. Over the full-scale range of the A/D, it will be assumed that there are an equal number of long and short codes. That repetitive pattern that exists over the space of 2 LSBs is depicted in Fig. 3-8. The noise from the long and short codes does not average to zero since, to arrive at a total for the squared error, the two sources of noise must be appropriately weighted by their probability of occurrence. From Fig. 3-8 it can be seen that long codes will occupy three-fourths of the range determined by 2N – 2 quantization levels, with the short codes occupying only one-fourth of the total.

Figure 3-8. Percentage of quantization range for long and short codes.
The alternating code model leads to the following result:
υe2¯=34υel2¯+14υes2¯=34⋅32υe2+14⋅12υe2υe,RMS=1.32q/12
The overall effect of alternating codes is a 32% increase in quantization noise. The degradation in SNR is then
SNRRMS=20log2Nq/221.32q/12=SNRideal−20log1.32SNRRMS=6.02N−0.65dBs
The increased quantization error reduces SNR by 2.41 dBs. A general equation for the alternating code model with variable DLE error is
υe,RMS=q/12⋅1+DLE3+DLE32
This equation is used in Fig. 3-9 to illustrate the degradation in SNR versus DLE error. This should serve as a guideline to relate the dynamic performance that can be expected in an A/D with a given static performance characteristic, since the long and short codes do tend to balance out. In an actual device, a more accurate RMS summation of errors would be complicated by the real distribution of code sizes.

Figure 3-9. Loss of SNR versus DLE, alternating code model.
The usual method of measuring SNR involves an analysis with a fast Fourier transform (FFT) algorithm, which will be discussed in Chapter 6. The FFT analysis of sampled data yields the same information as would be obtained by using an analog spectrum analyzer on a continuous waveform (e.g., noise and harmonic distortion). One of the points to be wary of when reviewing SNR specifications is that some manufacturers separate these dynamic errors, reporting SNR and THD (total harmonic distortion) separately. Others report the ratios of both signal-to-noise and signal to noise + distortion. Removing the error signals that are harmonically related to the input will artificially inflate the SNR. Occasionally, a manufacturer will measure the peak signal to RMS noise. Be aware that in such cases 3 dBs must be added to the ideal SNR.
As part of the process of separating harmonic distortion from noise, spectral averaging is sometimes employed. By accumulating multiple sets of data as input for an FFT, random signals will tend to be averaged out. This allows small amplitude harmonics to be detected while lowering the noise floor in the data. Be aware that if the result of this process is used to report SNR for the A/D, it will give a higher value than the user can expect to achieve in any single measurement.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780080508139500071
Resonant Converter
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
9.8 Close-loop under steady state
Following an identical step outlined by (6.4–6.7), the effective error voltage feeding the VCO is given by
(9.10)vef=AVref−naeb(Vo/m)+cRsen1+(R3/R2)−VFRdCTRRe
Taking (9.10) to (9.1), the VCO generates a square wave at frequency fvco. This is the frequency at which the converter’s power MOSFET switch operates. Readers are to be cautioned that this switching frequency is NOT the ω, the resonant tank frequency, mentioned in (9.3).
At the operating frequency fvco, (9.7) generates an output, Vo. The voltage output in turns enters the LED exponential model in (9.10) and closes the regulation loop.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000095
Hysteresis control methods
Oswaldo Lopez-Santos, … Carlos A. Torres-Pinzón, in Multilevel Inverters, 2021
2.7.3 Adaptive hysteresis control implementation
Consider that a sinusoidal voltage reference is compared with the output signal of the inverter, obtaining a voltage error as follows:
(2.10)ev=vrefωt−voωt
The voltage error signal can then be represented simultaneously with the hysteresis band limits, as depicted in Fig. 2.18. As can be noted, for this example a signal of normalized amplitude is built with one cycle using 9 levels and the other using 11 levels. As was mentioned earlier, the amplitude of the hysteresis band for each cycle adapts according to the number of levels used in the previous half-cycle. The zoom of the third quarter of the first cycle allows the commutation events in the inverter to be defined and the dead time introduced to ignore the crossing events that do not imply a new commutation, which are always immediately after a real commutation event.

Fig. 2.18. Representation of the voltage error signal together with different hysteresis bands.
Implementation of the proposed control requires the use of a digital device to store the lookup table with the gate signals required in the bridges, to produce every possible output level and also the lookup table with the reference. Internally, a memory pointer allows consecutive access to the addresses of the tables, taking into account comparison events. The sinusoidal reference is reproduced according to an inner sampling frequency to properly provide the desired output frequency. As depicted in Fig. 2.19, the voltage error is processed by the hysteresis comparator, which provides the up-and-down orders to the memory pointers. Each cycle, the maximum or minimum value produced in the counter allows updates of the amplitude of the hysteresis band for the subsequent cycle.

Fig. 2.19. Circuit diagram of the converter used to test the proposed control.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780323902175000022
Development of the Ideal Op Amp Equations∗
Bruce Carter, Ron Mancini, in Op Amps for Everyone (Fifth Edition), 2018
2.4 The Inverting Op Amp
The noninverting input of the op amp circuit is grounded. The assumption is made that the input error voltage is zero, so the feedback keeps inverting the input of the op amp at a virtual ground (not actual ground but acting like ground). The current flow in the input leads is assumed to be zero, hence the current flowing through RG equals the current flowing through RF (Fig. 2.4). Using Kirchhoff’s law, we write Eq. (2.4); and the minus sign is inserted because this is the inverting input. Algebraic manipulation gives Eq. (2.5).

Figure 2.4. The inverting op amp.
(2.4)I1=VINRG=−I2=−VOUTRF
(2.5)VOUTVIN=−RFRG
Notice that the gain is only a function of the feedback and gain resistors, so the feedback has accomplished its function of making the gain independent of the op amp parameters. The actual resistor values are determined by the impedance levels that the designer wants to establish. If RF = 10 k and RG = 10 k the gain is −1 as shown in Eq. (2.5), and if RF = 100 k and RG = 100 k the gain is still −1. The impedance levels of 10 or 100 k determine the current drain, the effect of stray capacitance, and a few other points. The impedance level does not set the gain; the ratio of RF/RG does.
One final note; the output signal is the input signal amplified and inverted. The circuit input impedance is set by RG because the inverting input is held at a virtual ground.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128116487000029
Nonideal Op Amp Characteristics
David L. Terrell, in Op Amps (Second Edition), 1996
10.1.3 Input Offset Voltage
Input offset voltage is another parameter listed in the manufacturer’s data sheet. Like the bias currents, it produces an error voltage in the output. That is, with 0 volts applied to the inputs of an op amp, we expect to find 0 volts at the output. In fact, we will find a small DC offset present at the output. This is called the output offset voltage and is a result of the combined effects of bias current (previously discussed above) and input offset voltage.
The error contributed by input offset voltage is a result of DC imbalances within the op amp. The transistor currents (see Figure 10.1) in the input stage may not be exactly equal because of component tolerances within the integrated circuit. In any case, an output voltage is produced just as if there were an actual voltage applied to the input of the op amp. To facilitate the analysis of the problem, we model the circuit with a small DC source at the noninverting input terminal (see Figure 10.4). This apparent source is called the input offset voltage, and it will be amplified and appear in the output as an error voltage. The output voltage caused by the input offset voltage can be computed with our basic gain equation.

FIGURE 10.4. The input offset voltage contributes to the DC offset voltage in the output of an op amp.
The manufacturer’s data sheet for a standard 741 lists the worst-case value for input offset voltage as 6 millivolts. In the case of the circuit shown in Figure 10.4, we could compute the output error voltage caused by the input offset voltage as follows:
VO=6 mV(180 kΩ56 kΩ+1)=25.29 mV
The polarity of the output offset may be either positive or negative. Therefore, it may add or subtract from the DC offset caused by the op amp bias currents. The worst-case output offset voltage can be estimated by assuming that the output voltages caused by the bias currents and the input offset voltage are additive. In that case, the resulting value of output offset voltage can be found as
(10.4)VOO=RFIIO+VIO(RFRI+1)
Most op amps, including the 741, have provisions for nulling or canceling the output offset voltage. Appendix 4 shows the recommended nulling circuit for an MC1741SC. It consists of a 10-kilohm potentiometer connected between the offset null pins (1 and 5) of the op amp. The wiper arm of the potentiometer connects to the negative supply voltage. The amplifier is connected for normal operation (excluding any DC input signals), and the potentiometer is adjusted to produce 0 volts at the output of the op amp. You should realize, however, that this only cancels the output offset voltage at one particular operating point. With temperature changes or simply over a period of time, the circuit may drift and need to be readjusted. Nevertheless, it is an improvement over a circuit with no compensation.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780750697026500111
Linear Regulator
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
5.2 Derivation of modulator gain
Following the same procedure, Figure 5.1 is first placed in its small signal equivalent circuit form, Figure 5.2.

Figure 5.1. A PNP Bipolar Linear Regulator.

Figure 5.2. Small Signal Equivalent Circuit for Figure 5.1.
For the purpose of developing modulator gain, and loop gain, eventually the equivalent circuit loop is broken at the error voltage node, and an external low-level test signal, vi, is injected. Both transistors are replaced by the common-emitter h-parameters. In this case, the simpler version considering only current gain, hfe, and input impedance, hie, is used. The transistor output feedback factor, hre, and output conductance, hoe, are omitted. Several variables are assigned as independent: v3, v4, and vo. At node v3, the following Kirchhoff’s current law (KCL) equation is established.
(5.1)1+hfe1R3+hie1+1R4v3=1+hfe1R3+hie1vi
And, at node v4,
(5.2)hfe1R3+hie1v3−1hie2+1ZE(s)v4=hfe1R3+hie1vi
at the output node,
(5.3)hfe2hie2v4+1R1+R2+Cces+1ZL(s)vo=0
The above three equations give the output as,
(5.4)vo=1+hfe1R3+hie1+1R401+hfe1R3+hie1vihfe1R3+hie1−1hie2+1ZE(s)hfe1R3+hie1vi0hfe2hie201+hfe1R3+hie1+1R400hfe1R3+hie1−1hie2+1ZE(s)00hfe2hie21R1+R2+Cces+1ZL(s)
The modulator gain, from the test signal injection to the error amplifier input, is then given as,
(5.5)M(s)=1+hfe1R3+hie1+1R401+hfe1R3+hie1hfe1R3+hie1−1hie2+1ZE(s)hfe1R3+hie10hfe2hie20R2R1+R21+hfe1R3+hie1+1R400hfe1R3+hie1−1hie2+1ZE(s)00hfe2hie21R1+R2+Cces+1ZL(s)
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000058
Review of Op Amp Basics
Bruce Carter, in Op Amps for Everyone (Fourth Edition), 2013
2.3.2 The Inverting Op Amp
The non-inverting input of the inverting op amp circuit is grounded as shown in Figure 2.7. One assumption made is that the input error voltage is zero, so the feedback keeps inverting the input of the op amp at a virtual ground (not actual ground but acting like ground). The current flow in the input leads is assumed to be zero; hence the current flowing through Rg equals the current flowing through Rf. Using Kirchhoff’s law, we write Equation 2.11; and the minus sign is inserted because this is the inverting input. Algebraic manipulation gives Equation 2.12.

Figure 2.7. The Inverting Op Amp
(2.11)I1=VINRg=−I2=−VOUTRf
(2.12)VOUTVIN=−RfRg
Notice that the gain is only a function of the feedback and gain resistors, so the feedback has accomplished its function of making the gain independent of the op amp parameters. The actual resistor values are determined by the impedance levels that you want to establish. If Rf=10 kΩ and Rg=10 kΩ the gain is minus one as shown in Equation 2.12, and if Rf=100 kΩ and Rg=100 kΩ the gain is still minus one. The impedance levels of 10 kΩ or 100 kΩ determine the current drain, the effect of stray capacitance, and a few other points. The impedance level does not set the gain; the ratio of Rf/Rg does.
One final note: the output signal is the input signal amplified and inverted. The circuit input impedance is set by Rg because the inverting input is held at a virtual ground.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123914958000027
High efficiency, high density, PolyPhase converters for high current applications
Wei Chen, in Analog Circuit Design, 2011
Current-sharing
The current-sharing can be easily achieved by implementing peak current mode control. In a current mode control regulator, the load current is proportional to the error voltage in the voltage feedback loop. If the paralleled regulators see the same error voltage, they will source equal currents. A 2-channel circuit is used as the example to explain this current-sharing mechanism.
As shown in Figure 14.1, peak current mode control requires that the high side switch turn off when the peak inductor current (IL1, IL2) intersects the error voltage, VER, resulting in the same peak inductor currents. If the inductors are identical, the peak-to-peak ripple currents of the inductors will be the same. The DC currents of two inductors, which are the peak current less half of the peak-to-peak ripple current, will be equivalent. Two modules therefore share the load current equally. The same current-sharing mechanism can be extended to any number of channels in parallel. This current-sharing scheme will prevent an individual module from suffering excessive current stress in steady state operation and during line/load transient conditions. Note that the sharing mechanism is open loop, so no oscillations will occur due to current-sharing.

Figure 14.1. 2-Channel Converter: (a) Schematic and (b) Typical Waveforms
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123851857000147
![]()
В схеме драйвера применены ЭРИ зарубежного производства.
Рисунок 2.2 – Распайка проводов
В качестве корпуса драйвера применяется корпус G1019 фирмы Gainta Industries. Данный корпус выполнен из жаросткойкого пластика. Корпус является легко доступным и дешевым (47 р. с НДС). В данном корпусе обеспечивается степень защиты IP40, IP65 в соответствии с ГОСТ 14254-96.
Драйвер УПС20 обеспечивает II класс защиты от поражения электрическим током по ГОСТ 12.2.007.0-75 (2001).
Драйвер УПС20 удовлетворяет требованиям электромагнитной совместимости в соответствии с ГОСТ Р 51514–99.
По уровню индустриальных радиопомех драйверы соответствуют требованиям ГОСТ Р 51318.15–99.
Драйверы предназначены для работы в электрических сетях общего назначения с номинальным напряжением 220 В частотой 50 Гц.
Испытания драйвера 20Вт (УПС20) проводились согласно «Программы испытаний драйвера мощностью 20 Вт корпусного исполнения IP40».
Протоколы испытаний УПС20 приведены в приложении А.
2.2 Описание драйвера 150 Вт
Структурная схема источника питания для светодиодного светильника мощностью 150 Вт приведена на рисунке 2.3.
51
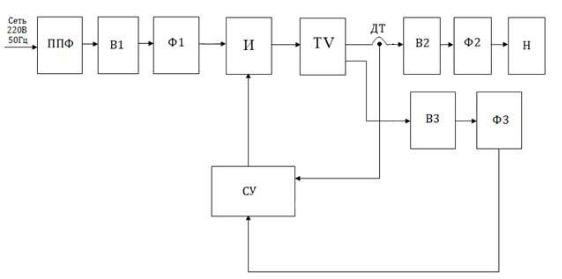
Рисунок 2.3 – Структурная схема источника питания мощностью 150 Вт ППФ – помехоподавляющий фильтр предназначен для подавления
электромагнитных помех со стороны самого источника питания.
В1 – входной низкочастотный однофазный выпрямитель преобразует напряжение промышленной частоты 50 Гц в постоянное.
Ф1 – входной фильтр предназначен для компенсации токов рекуперации, которые обусловлены спецификой работы электромагнитных элементов на высокой частоте.
И – высокочастотный инвертор преобразует постоянное выпрямленное напряжение в переменное высокочастотное.
ТV – высокочастотный трансформатор понижает напряжение инвертора до необходимой величины и обеспечивает эффективную передачу мощности на сигналах с быстрыми фронтами.
ДТ – датчик тока. Используется для стабилизации заданного значения
тока.
В2,В3 – выходные высокочастотные выпрямители, которые преобразуют переменное высокочастотное напряжение в постоянное выпрямленное.
Ф2, Ф3 – выходные высокочастотные фильтры, предназначены для фильтрации выходного высокочастотного напряжения.
СУ – система управления силовыми транзисторами. Используется
52
принцип широтно-импульсной модуляции (ШИМ) с применением обратной связи по току. Задает частоту и длительность импульсов тока силовых ключей;
Н – нагрузкой является светодиодная линейка с нелинейной вольт – амперной характеристикой.
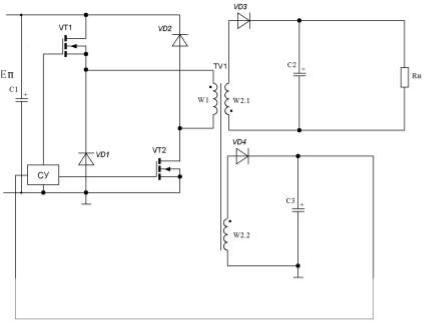
Высокочастотный инвертор И, высокочастотный трансформатор ТV,
выходные выпрямители В2, B3 и выходные фильтры Ф2, Ф3 образуют силовую часть источника питания (рисунок 2.4). Её основой является однотактный обратноходовой двухключевой инвертор (в отечественной литературе часто можно встретить название «косой полумост»).
Рисунок 2.4 – Однотактный двухключевой инвертор Такое схемное решение обладает рядом преимуществ и достоинств,
которые хорошо подходят для реализации источника питания для светодиодного светильника это:
-защита от короткого замыкания;
-универсальность схемы по мощности (с таким решением можно реализовывать схемы на рабочую мощность от 50Вт до 150Вт);
-напряжение на стоке силовых транзисторов не превышает напряжения питания инвертора, что даёт возможность использовать более дешёвые
53
силовые транзисторы;
-нет гальванической связи между входом и выходом;
-отсутствуют сквозные токи;
-малое число силовых ключей;
-энергия паразитных выбросов напряжения рекуперируется через диоды в первичный источник питания (это позволяет сохранить высокий КПД).
Инвертор работает следующим образом (рисунок 2.5). Когда транзисторы VT1, VT2 открыты, то диод VD3 закрыт, а энергия первичного источника, запасается в индуктивности намагничивания и в индуктивности рассеяния трансформатора. При этом магнитопровод трансформатора намагничивается в прямом направлении.
Когда транзисторы VT1,VT2 закрыты, то диод VD3 открыт и накопленная энергия через него поступает в конденсатор фильтра и нагрузку. Энергия, запасенная в индуктивности намагничивания и в индуктивности рассеяния трансформатора, возвращается в источник питания
E через открывающиеся диоды VD1 и VD2, благодаря чему протекает размагничивание магнитопровода в обратном направлении, за счет приложения обратного напряжения к обмотке w1.
54
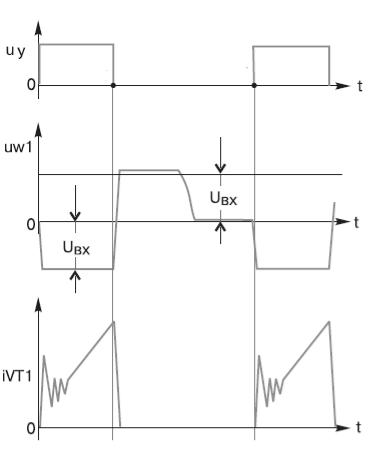
Рисунок 2.5 – Диаграммы работы однотактного двухключевого инвертора Поскольку к моменту открытия ключевого транзистора процесс
размагничивания должен окончиться, режим работы преобразователя выбирается таким, чтобы коэффициент заполнения не превышал величину
0,5. Поэтому в качестве входного напряжения при расчетах необходимо подставлять его минимально возможное значение.
В однотактный двухключевом инверторе может наблюдаться как прерывистый, так и непрерывный режим тока дросселя.
Главная цель схемы управления – это поддерживать выходное постоянное напряжение для большого диапазона токов нагрузки. Для этого используется контур отрицательной обратной связи. Контроллеры всех источников питания как линейных, так и импульсных – считывают выходное напряжение. Номинальное выходное напряжение понижается до уровня опорного напряжения внутри микросхемы контроллера. Это напряжение обратной связи подаётся на инверсный вход операционного усилителя с
55
большой степенью усиления, называемого усилителем напряжения ошибки.
Опорное напряжение подаётся на не инверсный вход того же операционного усилителя. Выход усилителя соответствует усиленной разнице между опорным и выходным напряжениями. Это выходное напряжение называется напряжением ошибки (рассогласования). Далее это напряжение используется для управления той частью энергии, которую источнику питания необходимо передать нагрузке. Напряжение ошибки может быть положительным в результате слишком низкого выходного напряжения. В этом случае источник питания должен увеличить значение передаваемой энергии. А
может быть напряжение ошибки и отрицательным в результате слишком высокого выходного напряжения. В этом случае источник должен уменьшить значение передаваемой энергии.
Для того чтобы источник питания не превышал своих номиналов мощности считывают значения тока с помощью датчиков тока, которые были рассмотрены выше.
Выбор метода управления микросхемы является очень важным моментом. В общем случае, прямоходовые топологии обычно используют контроллеры, работающие в режиме напряжения, а обратноходовые обычно в токовом режиме [1].
Так как светодиод является токовым прибором и силовая часть строится на основе обратноходового преобразователя, то в данной работе будет использован токовый режим управления контроллера.
Для управления силовой частью разрабатываемого источника питания хорошо подходит ШИМ – контроллер из семейства UC2844 – UC 3845. Это дешевый и распространённый чип, выпускаемый многими производителями.
Выберем один из вариантов этой серии исходя из следующих соображений:
 в данной серии чипов есть возможность ограничения величины рабочего цикла любой величиной, и все расчёты могут быть адаптированы под любое максимальное значение рабочего цикла.
в данной серии чипов есть возможность ограничения величины рабочего цикла любой величиной, и все расчёты могут быть адаптированы под любое максимальное значение рабочего цикла.
 сетевому источнику питания желательно иметь большой гистерезис
сетевому источнику питания желательно иметь большой гистерезис
56
питающего напряжения чипа – это значительно облегчает построение схем запуска и защиты.
 данная микросхема выпускается в двух модификациях. В чипах обозначение которых содержит индекс (А), снижен стартовый ток и несколько выше точность опорного напряжения, но стоимость их одинакова,
данная микросхема выпускается в двух модификациях. В чипах обозначение которых содержит индекс (А), снижен стартовый ток и несколько выше точность опорного напряжения, но стоимость их одинакова,
поэтому лучше использовать микросхему с индексом.
Сопоставляя всё вышесказанное, остановимся на выборе микросхемы
UC 2844 А как отвечающей всем условиям.
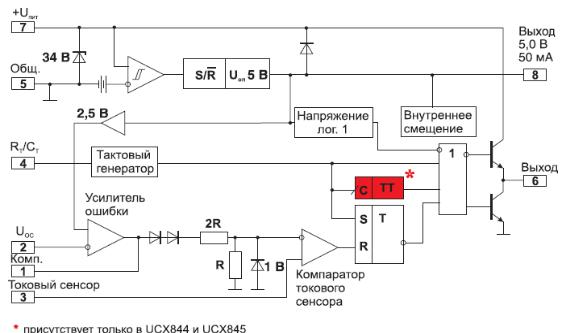
Структурная схема внутреннего строения микросхемы изображена на рисунке 2.6.
Рисунок 2.6 – Структурная схема внутреннего строения микросхемы
Микросхема содержит блок защитного выключения при снижении напряжения питания. Блок состоит из триггера Шмитта, имеющего дифференциальные входы, и источника опорного напряжения. С помощью
RS – триггера этот блок управляет общим источником опорного напряжения
5В. Этот источник имеет собственный вывод и обеспечивает ток до 50мА
(рисунок 2.7).
57
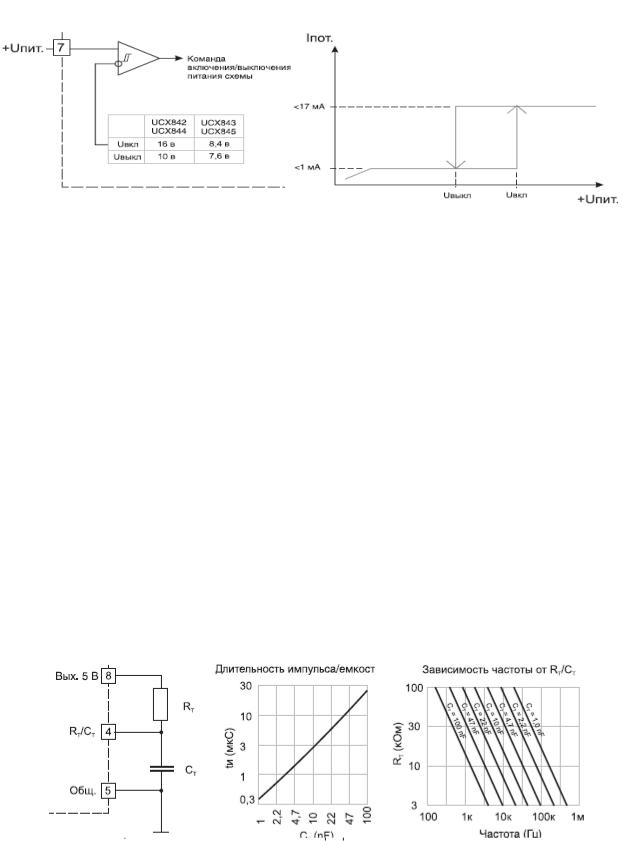
Рисунок 2.7 – Блок защитного отключения В режиме короткого замыкания он способен выдерживать до 100 мА.
Этот ШИМ – контроллер получил название токовый из – за блока защитного отключения Микросхема начинает работать при токе потребляемого около 1
мА и допускают питание от источника высокого напряжения через цепочку резисторов, главное чтобы обеспечивался диапазон рабочих токов и напряжений по выводам питания. Для этой цели между плюсом и землёй включен стабилитрон с напряжением пробоя. Помимо блока защитного отключения на кристалле выполнена схема внутреннего смещения и схема питания логики. Так же генератор импульсов, который имеет один вывод для подключения времязадающей RC – цепи (рисунок 2.8). На минимальную частоту ограничений в справочнике не указанно, а максимальная частота равна 500кГц.
Рисунок 2.8 – Генератор импульсов и зависимости рабочего цикла от ёмкости и частоты от сопротивления
58

На кристалле имеется усилитель ошибки (рисунок 2.9), не
инвертирующий вход которого подключен к внутреннему источнику напряжения 2,5В, а инвертирующий вход имеет собственный вывод,
служащий входом обратной связи.
Рисунок 2.9 – Усилитель ошибки
Выход этого усилителя соединяется с выводом 1и через цепочку сдвига уровня с инвертирующим входом компаратора ограничения тока. Не инвертирующий вход компаратора ограничения тока выведен на отрицательный вывод и служит для подключения к внешнему токоизмерительному резистору (рисунок 2.10), через который течёт ток нагрузки. Номинал этого резистора и, соответственно, падение напряжения на нём и определяет предельный ток, текущий через мощный внешний ключ,
которым управляет контроллер.
Рисунок 2.10 – Токовый сенсор
Другие устройства на кристалле – это RS – защёлка и логика. Вместе они обеспечивают модуляцию ширины импульса в зависимости от
59
напряжения усилителя ошибки и сигнала токового компаратора. Выходной каскад состоит из двух n — p — n транзисторов.
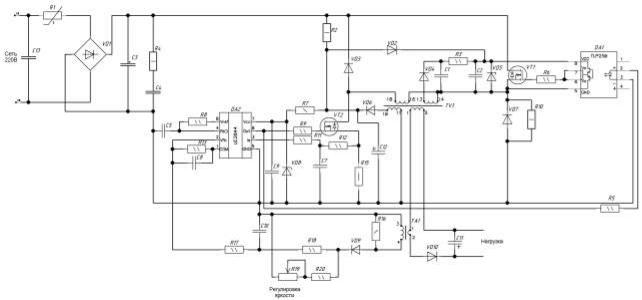
Схема электрическая принципиальная разработанного источника питания с выходной мощностью 150 Вт представлена на рисунке 2.11.
Рисунок 2.11 – Драйвер с мощностью 150 Вт.
На основании данного схемотехнического решения, но с изменением номинальных значений компонентов изготавливался источник питания с выходной мощностью 60 Вт. Полученные технические характеристики модифицированного драйвера указаны в пункте 1 настоящего отчёта.
2.3 Описание драйвера 20 Вт (-60 — +50 С)
Целью разработки данной модификации является получение источника питания для светодиодных светильников работоспособного при температуре
-60 — +50 С. Особенностью данного схемотехнического решения является отсутствие контроллера тока в интегральном исполнении, потому что этот компонент работает в диапазоне температур (-40 — +50 С). В связи с этим разработка и изготовления макета производилась с применением только дискретных элементов обладающих требуемым температурным диапазоном.
Данная схема представляет собой обычный обратноходовой
60
В современном информационном обществе, где происходит постоянный обмен данными, сигналами и информацией, важным является обеспечение надежности передачи информации. Одним из ключевых показателей надежности является уровень ошибок в передаваемых данных. Напряжение ошибки – это величина, которая позволяет оценивать качество передачи информации и выявлять возможные неисправности в системе передачи данных.
Суть понятия «напряжение ошибки» заключается в измерении разницы между фактическим значением сигнала и ожидаемым значением. Если фактическое значение сигнала отличается от ожидаемого, то говорят о наличии ошибки. Напряжение ошибки измеряется в процентах или в абсолютных единицах и позволяет определить степень искажения передаваемой информации.
Принцип работы напряжения ошибки
Принцип работы напряжения ошибки основывается на сравнении фактического значения сигнала с его ожидаемым значением. Для этого используется специальный алгоритм, который сопоставляет каждому символу передаваемой информации свое ожидаемое значение. Если фактическое значение отличается от ожидаемого, то оно регистрируется как ошибка.
Оценка напряжения ошибки позволяет выявить проблемы в передающей или приемной стороне системы передачи данных, а также в канале связи. Например, если напряжение ошибки превышает допустимый уровень, это может свидетельствовать о возникновении помех или шума на канале связи. Для повышения надежности передачи данных необходимо минимизировать напряжение ошибки и выявлять источники возможных искажений.
Содержание
- Что такое напряжение ошибки и как оно работает
- Сущность понятия
- Принцип работы
- Практическое применение
- Вопрос-ответ
- Что такое напряжение ошибки?
- Какое значение напряжения считается допустимым в случае ошибки?
- Как можно уменьшить напряжение ошибки?
Что такое напряжение ошибки и как оно работает
Напряжение ошибки – это понятие из области электрических схем и измерений. Оно отражает разницу между реальным и измеренным значением напряжения. Напряжение ошибки возникает из-за физических и технических ограничений при измерении и применении напряжения.
При измерении напряжения с помощью электрического прибора (например, вольтметра) возможны некоторые искажения или погрешности. Основные причины появления напряжения ошибки включают в себя неидеальность элементов схемы, связанных с измерением, и влияние внешних факторов, таких как температура и электромагнитные поля.
Основными принципами работы напряжения ошибки являются:
- Непосредственное измерение – в данном случае измеряется разница между реальным значением напряжения и его измеряемым значением. Это позволяет определить величину и характер ошибки.
- Компенсация – при использовании определенных методов и компонентов возможно уменьшить или устранить напряжение ошибки. Это может включать использование калибровочных приборов или корректирующих схем.
- Учет – знание о возможных источниках напряжения ошибки позволяет учесть его во время проектирования электрической схемы или при использовании электрических приборов. Это помогает минимизировать влияние ошибок на точность и надежность измерения.
Следует отметить, что напряжение ошибки не может быть полностью устранено или исключено из электрического измерения. Однако его влияние может быть существенно снижено путем применения правильных методов и средств компенсации, а также аккуратной настройки и эксплуатации измерительного оборудования.
Понимание напряжения ошибки и его принципов работы является важным вопросом для инженеров и специалистов, работающих в области электрических схем и измерений. Точность и надежность измерений напряжения имеют прямое значение для ряда промышленных и научных приложений, а также для обеспечения безопасности и эффективности работы различных электрических систем.
Сущность понятия
Напряжение ошибки – показатель, используемый в электротехнике для характеристики точности работы электрических схем и устройств.
Оно возникает в результате различных факторов, которые могут влиять на работу электрических компонентов. Включая такие факторы, как изменение температуры окружающей среды, смещение параметров элементов схемы и недостаточная точность изготовления компонентов.
Напряжение ошибки измеряется в вольтах и может быть положительным или отрицательным. Положительное напряжение ошибки означает, что измеряемое значение выше, чем фактическое, а отрицательное напряжение ошибки указывает на недооценку измеряемого значения по отношению к фактическому.
Существует несколько методов для компенсации напряжения ошибки и улучшения точности измерений:
- Калибровка – процесс, в ходе которого проводятся точные измерения и коррекция показаний прибора.
- Использование компенсационных элементов – добавление специальных компонентов в схему, которые помогают устранить или уменьшить напряжение ошибки.
- Улучшение качества компонентов – использование более точных и надежных элементов схемы при ее проектировании.
Важно отметить, что некоторый уровень напряжения ошибки в электрических схемах практически неизбежен. Однако, целью инженеров и специалистов в области электротехники является минимизация этого напряжения, чтобы обеспечить максимальную точность измерений и надежную работу системы в целом.
Принцип работы
Напряжение ошибки (ошибка смещения, offset voltage) – это разность между выходным напряжением и входным, которое возникает в операционном усилителе при его работе с нулевым входным сигналом.
Операционный усилитель – это электронный устройство, преобразующее разнообразные входные электрические сигналы в соответствующие по форме и амплитуде выходные сигналы. Он часто используется в устройствах, где требуется усиление, фильтрация или линейное преобразование электрических сигналов.
Ошибка смещения возникает из-за неидеальности операционного усилителя и связана с различными физическими и электрическими параметрами его компонентов. Она проявляется в том, что при входном нулевом сигнале на выходе операционного усилителя присутствует определенное постоянное напряжение.
Ошибку смещения можно рассматривать как сдвиг нулевого уровня сигнала на выходе. Это отклонение от идеального состояния, когда выходное напряжение должно быть равно нулю при нулевом входном сигнале. Величина напряжения ошибки измеряется в милливольтах и может быть как положительной, так и отрицательной.
Точность работы операционного усилителя и его способность обрабатывать сигналы с высокой точностью напрямую зависят от величины напряжения ошибки. Поэтому при разработке и использовании операционного усилителя необходимо учитывать этот фактор и применять меры для минимизации напряжения ошибки.
Практическое применение
Напряжение ошибки является важным аспектом во многих технических областях и находит применение в различных задачах. Рассмотрим некоторые из них:
- Измерительные приборы: Напряжение ошибки является одним из основных параметров, которые нужно учитывать при разработке и использовании измерительных приборов. Точность измерений напрямую зависит от минимизации напряжения ошибки.
- Автомобильная промышленность: В автомобилях также важно учитывать напряжение ошибки, например, в системах автоматического управления двигателем или диагностических приборах. Необходимо минимизировать ошибку измерения, чтобы обеспечить правильную работу системы.
- Электроника: В электронных устройствах, таких как смартфоны, компьютеры или телевизоры, количественные показатели и точность часто имеют значение. Например, в процессе калибровки дисплея требуется учет и компенсация возможного напряжения ошибки, чтобы отображаемые цвета были точными.
- Электронная безопасность: В области электронной безопасности напряжение ошибки может использоваться для анализа и выявления подозрительной активности. Ошибка измерения может указывать на наличие несанкционированного доступа или манипуляции со стороны злоумышленников.
- Энергетика: В сфере энергетики напряжение ошибки может применяться для контроля качества электроэнергии и оптимизации работы энергосистем. Минимизация ошибки измерений помогает определить эффективность работы системы и позволяет принимать меры для улучшения.
В каждой из этих областей напряжение ошибки играет важную роль и позволяет достичь более точных и надежных результатов. Учет этого параметра позволяет сократить возможные искажения и ошибки в измерениях или вычислениях, а также повысить качество и безопасность работы технических систем.
Вопрос-ответ
Что такое напряжение ошибки?
Напряжение ошибки — это разность между желаемым и фактическим значением напряжения, которое возникает при использовании электронных устройств. Оно может возникать из-за различных причин, включая несовершенство компонентов и шумы в электрической схеме.
Какое значение напряжения считается допустимым в случае ошибки?
Величина допустимого напряжения ошибки зависит от конкретных требований и характеристик устройства или системы. В некоторых случаях даже небольшие значения ошибки могут значительно повлиять на работу устройства. Обычно задается определенный диапазон допустимых значений напряжения ошибки.
Как можно уменьшить напряжение ошибки?
Существует несколько способов уменьшения напряжения ошибки. Один из них — использование более точных компонентов, таких как резисторы или операционные усилители. Также можно добавить фильтры, которые будут снижать влияние шумов и помех на электрическую схему. Также возможно использование алгоритмов коррекции, которые позволяют учесть и компенсировать ошибки при обработке сигнала.
Эксплуатационные причины ошибок. Во время эксплуатации механизмов появляются ошибки, вызываемые деформациями деталей и износом. Причинами деформаций могут быть силы, действующие на детали, нагрев деталей и внутренние остаточные напряжения. [c.128]
Определяют расчетные контактные напряжения в зоне зацепления зубьев, чтобы удостовериться в отсутствии ошибок в вычислениях основных параметров передачи и обеспечить полное использование материалов зубчатой пары. [c.144]
При интенсивной работе над важными техническими проблемами, например повышением эффективности работы ускорителя, внимание к вопросам безопасности притупляется. Для создания опытного образца и проведения экспериментов потребовалось большое напряжение сил. Эксперименты были непродолжительными, их условия постоянно менялись. По мере увеличения числа экспериментов требования к технике безопасности должны повышаться, поскольку увеличивается вероятность появления нарушений и особенно ошибок в работе. Как ни парадоксально, но практика работы со сравнительно небольшой аварийностью усиливает тенденцию к ослаблению требований к технике безопасности, требований, соблюдение которых и позволило добиться столь высокой безопасности. [c.404]
Для операционных усилителей современных АВМ всегда можно указать динамический диапазон, в пределах которого выходное напряжение пропорционально входному. Во избежание ошибок, связанных с насыщением усилителя, работа вне пределов линейного диапазона должна быть исключена. Вместе с тем, во избежание ощутимого влияния напряжений помех и случайных шумовых напряжений, уровень полезного сигнала должен быть достаточно высок. [c.332]
В основу расчетов надежности при действии негрубых ошибок полезно положить теорию точности механизмов и электрических устройств. Однако переход от определения точности машин к оценке их надежности при действии негрубых ошибок все же требует больших добавочных исследований, т. е. необходимо накапливать, статистически обрабатывать и систематизировать сведения об изменении первичных ошибок с течением времени. Важно удачно выбрать и строго соблюдать определенные условия, при которых производится экспериментальное изучение изменений первичных ошибок в результате старения материалов, износов, температурных воздействий, действия сил. Тогда вероятность соответствия выходных сигналов допускам будет зависеть от времени и обеспечит надежность машины при действии негрубых ошибок. Все вредные процессы по скорости их протекания можно разделить на три группы [103] быстро протекающие (вибрации, изменения условий трения, колебания нагрузок и др.) процессы, протекающие со средней скоростью (изменение температуры машины и окружающей среды, изменение влажности и др.) медленно протекающие процессы (износ и коррозия основных деталей, усталость, ползучесть, перераспределение внутренних напряжений и др.). [c.55]
| Рис. 6. Влияние ошибок профиля зубьев на напряженность деталей тягового двигателя. | 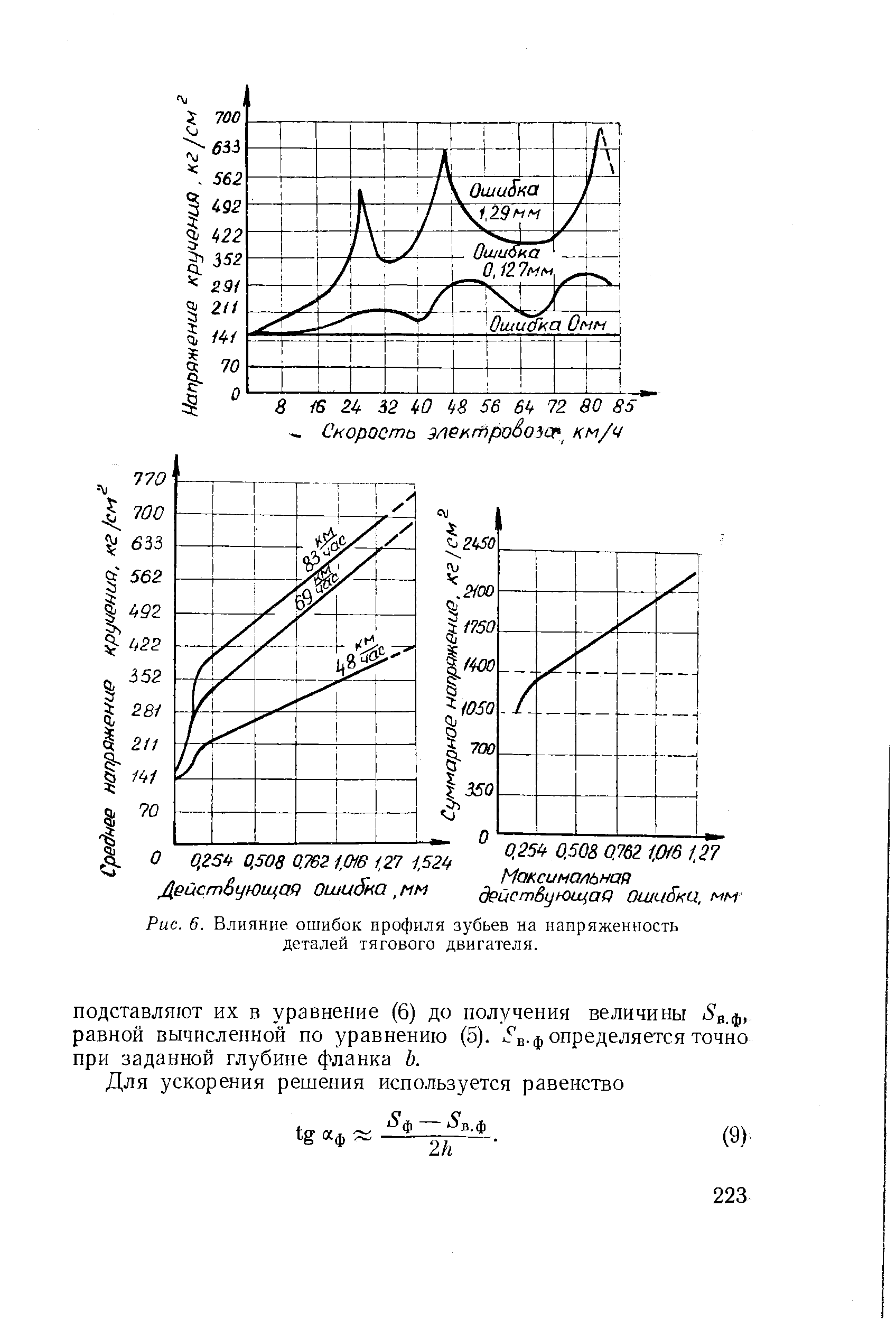 |
При отсутствии ошибок на контрольном изображении созданной составной фигуры ее математическая модель, аналогично ММ непроизводной фигуры, записывается в БМО и может быть передана в различные расчетные программы, например, для прочностных расчетов. Результат расчета выводится в виде таблиц на печатающие устройства либо в виде графиков функций, эпюр деформаций, линий равных напряжений и каркасов поверхностей функции двух переменных на графопостроитель или дисплей. [c.226]
Точность отсчета зависит от подаваемого на датчик напряжения чем выше напряжение, тем выше и точность отсчета. Следует иметь в виду, что при увеличении напряжения возможен нагрев датчика и появление по этой причине ошибок. [c.32]
Измерительный потенциометр д питается от той же сети через понижающий трансформатор а. Это позволяет избежать ошибок от колебания напряжения в сети. Наиболее целесообразной в данном случае является потенциометрическая схема измерения, так как в равновесном состоянии она не потребляет тока и не вносит искажений в распределение токов и напряжений в электроинтеграторе. Выпрямитель г включается с целью выпрямления переменного тока, так как в схеме используется высокочувствительный нуль-гальванометр в магнитоэлектрического типа, предназначенный для работы на постоянном токе. Данная схема измерительного устройства помимо исключения ошибок от колебания напряжения в сети позволяет также производить измерения напряжения непосредственно в относительных единицах. Включив схему интегратора и понижающий трансформатор измерительного устройства в сеть пере- [c.292]
Выравнивание случайных ошибок при определении напряжений путем установки дополнительного тензометра в исследуемой точке см. табл. 8. [c.505]
Применение дополнительного тензометра для выравнивания случайных ошибок при определении напряжений в исследуемой точке дано в табл. 8. [c.564]
Напряженное состояние — Компоненты 9 Определение — Применение тензометров для выравнивания ошибок 564, 565 [c.636]
Применение для выравнивания ошибок при определении напряженного состояния 564, 565 [c.647]
Чтобы избежать подобных ошибок, при определении собственных частот (см. рис. 9.11) на все лопатки, за исключением той, для которой определяется характерная частота, крепили массы для отстройки. Этот прием позволял достоверно оценивать характерную частоту для каждой из лопаток, когда она закреплена в диске. Полученные таким путем динамические характеристики описывают в определенной степени динамические особенности не только самих лопаток, но и упругой основы, на которой они закреплены. Результаты эксперимента свидетельствуют об отсутствии четкой взаимосвязи между индивидуальными частотами лопаток и уров нями резонансных напряжений на них. [c.185]
Экспериментальное определение распределения напряжений, соответствующих различным собственным формам колебаний консольных лопаток, осуществляется в лабораторных условиях. Для этого лопатка с необходимым числом тензорезисторов вводится последовательно в резонансы по своим различным собственным формам. На каждом из них определяют соответствующие распределения напряжений. Таким экспериментам должно предшествовать экспериментальное определение спектра собственных движений лопатки в заданном диапазоне частот (см. гл. 6 п. 2). Это позволит избежать возможных ошибок. [c.205]
Передаточное число и является частным случаем передаточного отношения i. В итличие от I значение а всегда больше единицы, всегда положительно и относится только к паре зубчатых колес. Применение а вместо i связано только с формой расчетных зависимостей для контактных напряжений — см., например, формулу (8.9), где Рпр выражают через di, а не через Однозначное онредетение и позволяет уменьшить вероятность ошибок при расчете. [c.98]
Полученные размеры передачи провгряются по контактным напряжениям a,t и сравниваются с донусклемымн. Проверка необходима не только при уменьшении размеров, полученных при прО ектном расчете, но и для выявления ошибок вычислений. [c.91]
Расчет зуба на изгиб ведется на основе предположения, что вследствие ошибок в основном шаге колес в зацеплении находится одна пара зубьев (рис. 10.5, а). Наибольшие напряжения изгиба возникают у основания зуба, когда нормальная сила Л ц приложена к вершине зуба и создает наибольший изгибающий момент. Перенесем точку приложения /V на ось симметрии зуба и разложим на составляющие Ni osy—изгибающую зуб и Л/12 sin Y — сжимающую зуб. [c.177]
Перечень наиболее вероятных источников ошибок в ПРВТ обширен. Это амплитудные погрешности экспериментальной оценки интегральных проекций, немоноэнергетичность и неидеальная коллимация используемого на практике рентгеновского излучения, конечные размеры апертур детектора и источника излучения (конечная толщина контролируемого слоя), неоптимальные интервалы дискретизации при сборе измерительных данных, приближенный и неоптимальный характер реализуемого цифрового алгоритма реконструкции, инерционность и нелинейность измерительных цепей, погрешности задания геометрии проекций в системе координат контролируемого изделия, многочисленные нестабильности (от пульсаций энергии фотонов излучения и питающих напряжений до механических вибраций коллиматоров), разнообразие структуры, [c.409]
Излагаемая теория основана на решении, удовлетворяющем уравнениям линейной теории упругости и внутренне непротиворечивом, т. е. удовлетворяющем всем внешним краевым условиям и условиям непрерывности на поверхностях раздела. Будет показана взаимосвязь между результатами настоящей работы и другими определяющими соотношениями для слоистых композитов, соответствующими более частным классам материалов. Особенно важно доказательство того, что определяющие уравнения классической теории слоистых материалов, разработанной Ставски [22] и Донгом с соавторами [5], а также уравнения, предложенные Чау с соавторами [4] и Хорошуном [10], после исправления некоторых мелких ошибок в работе [10] непосредственно следуют из представленных здесь общих результатов при частном виде нагрузки и условиях симметрии, принятых в указанных выше работах. Наконец, приведем данные, подтверждающие справедливость определяемого нами поля напряжений всюду вне узких областей пограничного слоя, изложив содержание работы Пайпса и Пагано [17], в которой рассматриваются возмущения типа пограничного слоя вблизи свободного края. [c.39]
Рассмотрено применение метода конечных элементов для расчета термических усадочных напряжений ) в композитах. В введении отмечено, что большинство ранее предложенных методов основано на линейном подходе. Это приводит, как правило, к завышенной оценке уровня усадочных напряжений. Основной источник ошибок заключается в неучете ползучести полимерной матрицы. В этой главе остаточные напряжения, рассчитанные с учетом ползучести матрицы, сравниваются с соответствующими напряжениями, полученными в предположении об отсутствии ползучести. Показано влияние температурного режима цикла отверждения на напряженное состояние композита носле завершения технологического процесса. Рассмотрены такие ситуации, когда превышение остаточными напряжениями пределов текучести одной из компонент композита приводит к изменениям его деформативных свойств. Дана оценка влияния остаточных напряжений на неунругое поведение композита. [c.249]
Источником ошибок при расчете является неопределенность границ напряжений, при которых принятая гипотеза справедлива. Формально эти ошибки вносятся в расчет при выборе параметров I а k (формулы (1.28) — (1.31)). Границы повреждающих напряжений определяются согласно принятой гипотезе. Естественными границами для вычисления повреждения могут быть границы спектра эксплуатационных нагрузок, если они попадают в область повреждающих напряжений. Однако спектры эксплуатационных нагрузок в основном состоят из малых значений амплитуд и лишь небольшую их часть составляют повреждающие нагрузки. По условиям статистической обработки эти участки спектра не разделяются. Они описываются общей аналитической зависимостью Ф (а), как правило, выходящей за пределы повреждающих напряжений. В области перехода от неповреждающих напряжений к повреждающим Ф (а) является очень быстро убывающей функцией. При больших значениях а это убывание имеет асимптотический характер. Если кривая усталости N a) представляет собой функцию, убывающую более медленно, чем Ф (<т) в области перехода (что чаще всего бывает в реальных деталях), результаты расчета ресурса оказываются существенно зависимыми от величины параметра k. С физической то ки зрения это означает, что накопление повреждения происходит в основном вследствие большого числа циклов эксплуатационной нагрузки, незначительно превышающей нижнюю границу повреждающих напряжений (или напряжений, способствующих развитию усталостной трещины). Поскольку эта граница очень влияет на результат расчета, необходимо точно ее определить. [c.14]
Ошибки при определении напряжений в испытываемых образцах и возникающих при этом динамических погрешностей для машин с возбуждением постоянной силой и машин других типов имеют существенно различный характер. Динамические ошибки в определении нагруженности образца порождаются колебаниями упругой системы, возникающими в результате биения вращающихся деталей. Сложившиеся представления о характере динамических ошибок в рассматриваемых машинах сводятся к тому, что биение системы существенно влияет на амплитуду возбуждаемых в образце напряжений, увеличивая ее с ростом величины начального биения. Поэтому к точности изготовления и тщательности установки зах вато в и образцов предъявляются очень высовие требования. [c.89]
На рис. 3.11 представлены регуляризованные решения при двух уровнях погрешности задания кольцевых и меридиональных напряжений, Кривые 7 и 2 отвечают значениям относительных случайных ошибок с нормальным законом распределения, не превышающим соответственно 5 и 10% от величины напряжений в узловых точках s,-. Рисунок иллюстрирует устойчивость регул яризованных приближений к возмущению исходных данных (кривая 3 — точное значение искомой температуры), [c.86]
На рис. 1, д приведена структурная схема системы ФС-1 с вводом информации от магнитной ленты. Работа датчиков обратной связи ОС осуществляется от стабилизированного генератора Г через опорный делитель ДО — общий для всей системы. Сигналы опорной частоты и фазоимпульсные командные сигналы поступают на схему сброса СБ и схему суммирования частот СС. Схема сброса производит периодический сброс делителя координаты ДК для устранения накапливающихся ошибок, которые возможны при пропаже единичных импульсов. Схема суммирования частот осуществляет модуляцию частоты генератора Г на входе делителя координаты ДК- Сигнал рассогласования е выделяется на фазовом дискриминаторе ФД. Линейные фазовые датчики системы требуют напряжения питания частотой 10 кгц. [c.76]
Сложившиеся к настоящему времени методы расчета деталей машин заключаются-в следующем. Вначале определяются статические и динамические усилия и соответствующие им максимальные напряжения в сечениях деталей. Затем эти напряжения сопоставляются с предельными напряжениями (пределом текучести или пределом прочности) для принятого -материала деталей в свою очередь, предельные напряжения находятся из справочных данных. С целью учета возможных ошибок при определении цагрузок и выбора величины предельных напряжений задается запас прочности, т. -е. превышение предельных напряжений над расчетными. Если в сечениях рассматриваемой детали имеют место переменные напряжения, то. выполняется расчет детали на усталость, который учитывает уменьшение ее прочности с увеличением числа циклов приложения переменных напряжений, [c.3]
Приведённые выше формулы для определения допускаемых контактных напряжений сдвига дают значения последних, равные пределам усталости рабочих поверхностей на сдвиг по наиболее низким опытным данным. Так как R j или определяются по минимальной прочности или твёрдости материала зубьев, а т определяется с учётом динамической нагругки, подсчитываемой при наиболее неблагоприятном характере и при наибольшей величине ошибок нарезания, то можно ориентироваться на средние значения экспериментально найденных пределов контактной усталости (при обработке экспериментальных данных динамическая нагрузка и неравномерность распределения нагрузки по контактным линиям в большинстве случаев не учитывались). [c.260]
С целью предотвращения ошибок при < иксации мгновенньй ана-чений случаЯного напряжения иа-эа неодновременного размыкания контактов 1, П, Ш рядов искателя во входные цепи операци- [c.211]
Необходимость обеспечения минимальной массы конструкции при безусловной ее надежности и высоком ресурсе определил поиск таких методов анализа напряженно-деформированного состояния, которые позволяют получить ясную картину напряженно-деформировашюго состояния конструкции на возможно более ранней стадии проектирования (во избежание возможных ошибок до того, как начнутся рабочее проектирование и испытания), а также достичь максимальной точности прогнозирования напряжений, так как 10%-ная погрешность в определении напряжений приводит почти к двойной погрешности в ресурсе. [c.49]
Принятая методика измерений позволяла определять температурный напор АТ = Тст — Г S и тепловые нагрузки д. Температура рабочей жидкости (Ts) измерялась платиновым термометром сопротивления. Удельная тепловая нагрузка рассчитывалась по падениям напряжений на опытном участке и эталонном сопротивлении. Температура теплоотдающей поверхности Тст определялась по сопротивлению опытного участка, который одновременно выполнял роль термометра сопротивления. При этом на каждом режиме по давлению производилась тарировка опытного участка. у нализ ошибок и расчет основных погрешностей показали, что ошибка в измерении АТ для всех опытов не превышала 10]%. [c.157]
Напряжение — ошибка
Cтраница 2
При уменьшении напряжения ошибки стабилизирующее напряжение будет резко уменьшать напряжение на входе усилителя и способствовать торможению двигателя; при возрастании напряжения ошибки стабилизирующий сигнал способствует разгону системы.
[16]
Поэтому к напряжению ошибки щ прибавляется напряжение Д и суммарный сигнал на входе усилителя У: us ые. Благодаря этому обеспечивается большая скорость уменьшения угла рассогласования. Увеличение напряжения us по сравнению с 6 соответствует повышению kp системы. При малых углах рассогласования и1 2 т-е — начинает преобладать отрицательная обратная связь.
[18]
При таком напряжении ошибки усилитель остается, как правило, работоспособным. Если при заданном входном сопротивлении инвертирующего усилителя сопротивление резистора в цепи обратной связи Roc получается свыше 1 МОм, то используют схему с Т — образной цепью обратной связи ( рис. 6.6), которая позволяет снизить номиналы резисторов обратной связи до приемлемого значения.
[19]
С выхода УСО напряжение ошибки поступает на регулирующий элемент РЭ и изменяет его коэффициент передачи.
[21]
С движка R6 напряжение ошибки поступает на регулирующий транзистор VT1, который управляет длительностью импульсов, генерируемых микросхемой.
[23]
Это напряжение ( напряжение ошибки) подается на вход усилителя УРЗ, который усиливает сигнал ошибки по напряжению и по мощности.
[24]
С движка R6 напряжение ошибки поступает на регулирующий транзистор VT1, который управляет длительностью импульсов, генерируемых микросхемой.
[26]
Практически всегда имеется напряжение ошибки следящей системы е А — ВС.
[28]
При положительном значении напряжения ошибки полевой транзистор запирается, ток стока уменьшается, и напряжение, подаваемое на варикап, становится меньше. Частота гетеродина при этом в процессе автоподстройки возрастает.
[29]
Необходимо заметить, что напряжение ошибки на вход усилителя-преобразователя в рассматриваемой схеме поступает в виде пачки ам-плитудно-модулированных растянутых импульсов через промежутки времени Та, равные периоду вращения антенны РЛС. Продолжительность каждой пачки импульсов напряжения ошибки очень мала по сравнению с периодом обзора.
[30]
Страницы:
1
2
3
4
5