Vector Error Correction (VEC) Models
A vector error correction (VEC) model is a restricted VAR designed for use with nonstationary series that are known to be cointegrated. You may test for cointegration using an estimated VAR object, Equation object estimated using nonstationary regression methods, or using a Group object (see
“Cointegration Testing”).
The VEC has cointegration relations built into the specification so that it restricts the long-run behavior of the endogenous variables to converge to their cointegrating relationships while allowing for short-run adjustment dynamics. The cointegration term is known as the error correction term since the deviation from long-run equilibrium is corrected gradually through a series of partial short-run adjustments.
To take the simplest possible example, consider a two variable system with one cointegrating equation and no lagged difference terms. The cointegrating equation is:
 |
(44.39) |
The corresponding VEC model is:
 |
(44.40) |
How to Estimate a VEC
As the VEC specification only applies to cointegrated series, you should first run the Johansen cointegration test as described above and determine the number of cointegrating relations. You will need to provide this information as part of the VEC specification.
To set up a VEC, click the button in the VAR toolbar and choose the Vector Error Correction specification from the VAR/VEC Specification tab. In the VAR/VEC Specification tab, you should provide the same information as for an unrestricted VAR, except that:
• The constant or linear trend term should not be included in the Exogenous Series edit box. The constant and trend specification for VECs should be specified in the Cointegration tab (see below).
• The lag interval specification refers to lags of the first difference terms in the VEC. For example, the lag specification “1 1” will include lagged first difference terms on the right-hand side of the VEC. Rewritten in levels, this VEC is a restricted VAR with two lags. To estimate a VEC with no lagged first difference terms, specify the lag as “0 0”.
• The constant and trend specification for VECs should be specified in the Cointegration tab. You must choose from one of the five Johansen (1995) trend specifications as explained in
“Deterministic Trend Specification”. You must also specify the number of cointegrating relations in the appropriate edit field. This number should be a positive integer less than the number of endogenous variables in the VEC.
• If you want to impose restrictions on the cointegrating relations and/or the adjustment coefficients, use the Restrictions tab.
“Imposing VEC Restrictions” describes these restriction in greater detail. Note that the contents of this tab are grayed out unless you have clicked the Vector Error Correction specification in the VAR/VEC Specification tab.
Once you have filled the dialog, simply click OK to estimate the VEC. Estimation of a VEC model is carried out in two steps. In the first step, we estimate the cointegrating relations from the Johansen procedure as used in the cointegration test. We then construct the error correction terms from the estimated cointegrating relations and estimate a VAR in first differences including the error correction terms as regressors.
VEC Estimation Output
The second part of the output reports results from the second step VAR in first differences, including the error correction terms estimated from the first step. The error correction terms are denoted CointEq1, CointEq2, and so on in the output. This part of the output has the same format as the output from unrestricted VARs as explained in
“Estimation Output”, with one difference. At the bottom of the VEC output table, you will see two log likelihood values reported for the system. The first value, labeled Log Likelihood (d.f. adjusted), is computed using the determinant of the residual covariance matrix (reported as Determinant Residual Covariance), using small sample degrees of freedom correction as in
(44.11). This is the log likelihood value reported for unrestricted VARs. The Log Likelihood value is computed using the residual covariance matrix without correcting for degrees of freedom. This log likelihood value is comparable to the one reported in the cointegration test output.
Views and Procs of a VEC
Views and procs available for VECs are mostly the same as those available for VARs as explained above. Here, we only mention those that are specific to VECs.
Cointegrating Relations
displays a graph of the estimated cointegrating relations as used in the VEC. To store these estimated cointegrating relations as named series in the workfile, use . This proc will create and display an untitled group object containing the estimated cointegrating relations as named series. These series are named COINTEQ01, COINTEQ02 and so on.
Forecasting
To forecast from your VEC, click on the Forecast button on the toolbar and fill out the dialog as described in
“Forecasting”
Data Members
Various results from the estimated VAR/VEC can be retrieved through the command line data members.
“Var Data Members” provides a complete list of data members that are available for a VAR object. Here, we focus on retrieving the estimated coefficients of a VAR/VEC.
Obtaining Coefficients of a VAR
Coefficients of (unrestricted) VARs can be accessed by referring to elements of a two dimensional array C. The first dimension of C refers to the equation number of the VAR, while the second dimension refers to the variable number in each equation. For example, C(2,3) is the coefficient of the third regressor in the second equation of the VAR. The C(2,3) coefficient of a VAR named VAR01 can then be accessed by the command
var01.c(2,3)
To examine the correspondence between each element of C and the estimated coefficients, select from the VAR toolbar.
Obtaining Coefficients of a VEC
For VEC models, the estimated coefficients are stored in three different two dimensional arrays: A, B, and C. A contains the adjustment parameters  , B contains the cointegrating vectors
, B contains the cointegrating vectors  , and C holds the short-run parameters (the coefficients on the lagged first difference terms).
, and C holds the short-run parameters (the coefficients on the lagged first difference terms).
• The first index of A is the equation number of the VEC, while the second index is the number of the cointegrating equation. For example, A(2,1) is the adjustment coefficient of the first cointegrating equation in the second equation of the VEC.
• The first index of B is the number of the cointegrating equation, while the second index is the variable number in the cointegrating equation. For example, B(2,1) is the coefficient of the first variable in the second cointegrating equation. Note that this indexing scheme corresponds to the transpose of  .
.
• The first index of C is the equation number of the VEC, while the second index is the variable number of the first differenced regressor of the VEC. For example, C(2, 1) is the coefficient of the first differenced regressor in the second equation of the VEC.
You can access each element of these coefficients by referring to the name of the VEC followed by a dot and coefficient element:
var01.a(2,1)
var01.b(2,1)
var01.c(2,1)
To see the correspondence between each element of A, B, and C and the estimated coefficients, select from the VAR toolbar.
Imposing VEC Restrictions
Since the cointegrating vector  is not fully identified, you may wish to impose your own identifying restrictions when performing estimation.
is not fully identified, you may wish to impose your own identifying restrictions when performing estimation.
Restrictions can be imposed on the cointegrating vector (elements of the  matrix) and/or on the adjustment coefficients (elements of the
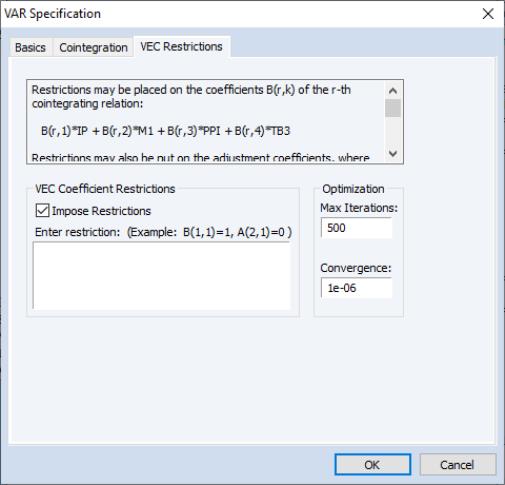
matrix) and/or on the adjustment coefficients (elements of the  matrix). To impose restrictions in estimation, open the test, select in the main VAR estimation dialog, then click on the tab. You will enter your restrictions in the edit box that appears when you check the box:
matrix). To impose restrictions in estimation, open the test, select in the main VAR estimation dialog, then click on the tab. You will enter your restrictions in the edit box that appears when you check the box:
Restrictions on the Cointegrating Vector
To impose restrictions on the cointegrating vector  , you must refer to the (i,j)-th element of the transpose of the
, you must refer to the (i,j)-th element of the transpose of the  matrix by B(i,j). The i-th cointegrating relation has the representation:
matrix by B(i,j). The i-th cointegrating relation has the representation:
B(i,1)*y1 + B(i,2)*y2 + … + B(i,k)*yk
where y1, y2, … are the (lagged) endogenous variable. Then, if you want to impose the restriction that the coefficient on y1 for the second cointegrating equation is 1, you would type the following in the edit box:
B(2,1) = 1
You can impose multiple restrictions by separating each restriction with a comma on the same line or typing each restriction on a separate line. For example, if you want to impose the restriction that the coefficients on y1 for the first and second cointegrating equations are 1, you would type:
B(1,1) = 1
B(2,1) = 1
Currently all restrictions must be linear (or more precisely affine) in the elements of the  matrix. So for example
matrix. So for example
B(1,1) * B(2,1) = 1
will return a syntax error.
Restrictions on the Adjustment Coefficients
To impose restrictions on the adjustment coefficients, you must refer to the (i,j)-th elements of the  matrix by A(i,j). The error correction terms in the i-th VEC equation will have the representation:
matrix by A(i,j). The error correction terms in the i-th VEC equation will have the representation:
A(i,1)*CointEq1 + A(i,2)*CointEq2 + … + A(i,r)*CointEqr
A(1,1) = A(2,1)
is valid but:
A(1,1) = 1
will return a restriction syntax error.
A(2,1) = 0
To impose multiple restrictions, you may either separate each restriction with a comma on the same line or type each restriction on a separate line. For example, to test whether the second endogenous variable is weakly exogenous with respect to  in a VEC with two cointegrating relations, you can type:
in a VEC with two cointegrating relations, you can type:
A(2,1) = 0
A(2,2) = 0
A(1,1) = 0
B(1,1) = 1
is a valid restriction but:
A(1,1) = B(1,1)
will return a restriction syntax error.
Identifying Restrictions and Binding Restrictions
EViews will check to see whether the restrictions you provided identify all cointegrating vectors for each possible rank. The identification condition is checked numerically by the rank of the appropriate Jacobian matrix; see Boswijk (1995) for the technical details. Asymptotic standard errors for the estimated cointegrating parameters will be reported only if the restrictions identify the cointegrating vectors.
If the restrictions are binding, EViews will report the LR statistic to test the binding restrictions. The LR statistic is reported if the degrees of freedom of the asymptotic  -distribution is positive. Note that the restrictions can be binding even if they are not identifying, (e.g. when you impose restrictions on the adjustment coefficients but not on the cointegrating vector).
-distribution is positive. Note that the restrictions can be binding even if they are not identifying, (e.g. when you impose restrictions on the adjustment coefficients but not on the cointegrating vector).
Options for Restricted Estimation
Once you have filled the dialog, simply click OK to estimate the VEC. Estimation of a VEC model is carried out in two steps. In the first step, we estimate the cointegrating relations from the Johansen procedure as used in the cointegration test. We then construct the error correction terms from the estimated cointegrating relations and estimate a VAR in first differences including the error correction terms as regressors.

|
Эконометрика. Введение в регрессионный анализ временных рядов. В.П.Носко www.iet.ru |
16 |
коинтеграционное соотношение не включаются ни константа ни тренд; ранг коинтеграции равен 2”.
Приведем теперь сводку статистик для определения ранга коинтеграции тройки рядов
W2 t , W3 t и W4 t .
Series: WALK2 WALK3 WALK4 Lags interval: No lags
|
Data Trend: |
None |
None |
Linear |
Linear |
Quadratic |
|
Rank or |
No Intercept |
Intercept |
Intercept |
Intercept |
Intercept |
|
No. of CEs |
No Trend |
No Trend |
No Trend |
Trend |
Trend |
|
Akaike |
|||||
|
0 |
-1.209358 |
-1.209358 |
-1.211316 |
-1.211316 |
-1.205445 |
|
1 |
-1.201837 |
-1.206417 |
-1.208105 |
-1.209616 |
-1.206429 |
|
2 |
-1.191311 |
-1.194747 |
-1.195348 |
-1.193234 |
-1.192934 |
|
3 |
-1.168162 |
-1.177195 |
-1.177195 |
-1.171753 |
-1.171753 |
|
Schwarz |
|||||
|
0 |
-1.209358 |
-1.209358 |
-1.185951 |
-1.185951 |
-1.154715 |
|
1 |
-1.151107 |
-1.147232 |
-1.132009 |
-1.125065 |
-1.104968 |
|
2 |
-1.089850 |
-1.076376 |
-1.068523 |
-1.049499 |
-1.040743 |
|
3 |
-1.015971 |
-0.999639 |
-0.999639 |
-0.968832 |
-0.968832 |
|
L.R. Test: |
Rank = 0 |
Rank = 0 |
Rank = 0 |
Rank = 0 |
Rank = 0 |
Здесь в рамках каждого столбца цепочки критериев выводят на ранг 0, что соответствует DGP. Критерий Акаике указывает на варианты с трендом в данных, тогда как критерий Шварца останавливается на вариантах без тренда в данных, что и соответствует DGP.
После оценивания ранга коинтеграции в рамках процедуры Йохансена имеется возможность получения (при выбранном ранге коинтеграции r ) оценок максимального правдоподобия для r линейно независимых коинтегрирующих векторов. Реализация такого оценивания в пакете EVIEWS для группы из 5 рядов, рассмотренной в предыдущем примере (r = 2), дает следующие результаты.
Test assumption: No deterministic trend in the data Series: L234 L23 WALK2 WALK3 WALK4
Lags interval: No lags
Unnormalized Cointegrating Coefficients:
|
L234 |
L23 |
WALK2 |
WALK3 |
WALK4 |
||||
|
-0.079261 |
-0.198108 |
0.236127 |
0.178603 |
0.159704 |
||||
|
-0.202709 |
0.079211 |
0.022787 |
0.161363 |
0.406370 |
||||
|
0.001194 |
0.000453 |
-0.014625 |
-0.034465 |
0.037834 |
||||
|
-0.002101 |
0.001543 |
0.019423 |
-0.024621 |
0.007077 |
||||
|
-0.000206 |
0.000771 |
0.011197 |
-0.009764 |
-0.012244 |
||||
Каждая строка этой таблицы содержит компоненты одного из возможных коинтегрирующих векторов. Всего, таким образом, предлагается к рассмотрению 5 вариантов коинтегрирующих векторов, причем эти пять векторов являются линейно
www.iet.ru/mipt/2/text/curs_econometrics.htm
|
Эконометрика. Введение в регрессионный анализ временных рядов. В.П.Носко www.iet.ru |
17 |
независимыми. Первая из 5 строк содержит коэффициенты линейной комбинации указанных рядов, “наиболее похожей на стационарную”. Вторая строка соответствует линейной комбинации, занимающей в этом отношении второе место, и т.д.
Если бы мы оценили ранг коинтеграции как r = 1, то тогда в качестве оценки коинтегрирующего вектора можно было взять вектор с компонентами, приведенными в первой строке, т.е. вектор
(-0.079261, -0.198108, 0.236127, 0.178603, 0.159704)T ,
или любой пропорциональный ему вектор. Выбирая из этого множества вектор, нормализованный на первую компоненту, т.е. вектор, полученный из указанного делением всех его компонент на первую компоненту, мы получили бы вектор
(1, 2.499451, – 2.979119, – 2.25363, – 2.014916)T .
Поскольку ранг коинтеграции был оценен как r = 2, то в качестве оценок двух линейно независимых коинтегрирующих векторов можно взять векторы с компонентами, приведенными в первых двух строках, т.е. векторы
β*(1) = (– 0.079261, – 0.198108, 0.236127, 0.178603, 0.159704)T
и
β*(2) = (– 0.202709, 0.079211, 0.022787, 0.161363, 0.406370)T.
Дело, однако, в том, что помимо этих двух векторов в качестве коинтегрирующих векторов с тем же успехом могут выступать и любые линейные комбинации этих двух векторов. И в реальных экономических задачах важно, чтобы выбранная в итоге из этого множества пара векторов выражала осмысленные с экономической точки зрения (экономической теории) долговременные связи между рассматриваемыми переменными (например, паритет покупательной способности, спрос на деньги и т.п.). Это, в свою очередь, требует наложения на коинтегрирующие векторы соответствующих идентифицирующих ограничений, позволяющих различать эти векторы, выделяя их из всего множества линейных комбинаций базисных векторов.
Если ранг коинтеграции равен r > 1, то для различения коинтегрирующих векторов достаточно наложить на каждый из коинтегрирующих векторов q = r – 1 линейных ограничений (причем эти линейные ограничения сами должны быть линейно независимыми – иначе различения не получится). Это дает возможность определить каждый из коинтегрирующих векторов с точностью до коэффициента пропорциональности, а затем получить единственный набор коинтегрирующих векторов, нормируя компоненты каждого вектора на какую-либо из его (ненулевых) компонент.
В нашем примере r = 2, так что на каждый из двух коинтегрирующих векторов достаточно наложить по одному линейному ограничению, например, приравнять одну из компонент коинтегрирующего вектора нулю. При этом зануляемые компоненты в двух векторах должны быть различными. Выбор зануляемых компонент на практике определяется, исходя из представлений той или иной экономической теории.
Имитируя такой выбор, мы будем исходить из наличия информации о том, что “в соответствии с некоторой экономической теорией”, между переменными L234t , L23t , W2 t , W3 t и W4 t должны существовать две долговременные связи, одна из которых связывает переменные L234t , W2 t, W3 t , W4 t и не включает переменную L23t , а другая связывает переменные L23t , W2 t, W3 t , W4 t и не включает переменную L234t . Если при этом из той же “экономической теории” следует также, что в первой долговременной связи “объясняемой” переменной является L234t , а во второй – переменная L23t , то, нормируя первый коинтегрирующий вектор на первую компоненту, а второй коинтегрирующий вектор – на вторую компоненту, мы представляем эти коинтегрирующие векторы в виде
www.iet.ru/mipt/2/text/curs_econometrics.htm

|
Эконометрика. Введение в регрессионный анализ временных рядов. В.П.Носко www.iet.ru |
18 |
β(1) = (1, 0, β13 , β14 , β15)T
β(2) = (0, 1, β23 , β24 , β25)T .
Таким образом, после получения двух произвольных линейно независимых оценок двух коинтегрирующих векторов,
(-0.079261, -0.198108, 0.236127, 0.178603, 0.159704)T,
(-0.202709, 0.079211, 0.022787, 0.161363, 0.406370)T,
задача состоит в отыскании линейных комбинаций этих оцененных векторов, имеющих вид
(1, 0, β13 , β14 , β15)T и (0, 1, β23 , β24 , β25)T .
Решение этой задачи в пакете EVIEWS приводит к следующему результату:
Normalized Cointegrating Coefficients: 2 Cointegrating Equation(s)
|
L234 |
L23 |
WALK2 |
WALK3 |
WALK4 |
|
1.000000 |
0.000000 |
-0.499995 |
-0.993065 |
-2.006077 |
|
(0.00541) |
(0.00868) |
(0.00852) |
||
|
0.000000 |
1.000000 |
-0.991867 |
-0.504230 |
-0.003537 |
|
(0.00549) |
(0.00881) |
(0.00865) |
В соответствии с этой таблицей,
β(1) = (1, 0, – 0.499995, – 0.993065, – 2.006077)T
β(2) = (0, 1, – 0.991867, – 0.504230, – 0.003537)T .
Это соответствует двум долговременным соотношениям
L234t = 0.499995W2 t + 0.993065W3 t + 2.006077W4 t, L23t = 0.991867W2 t + 0.504230W3 t + 0.003537 W4 t,
которые близки к теоретическим долговременным соотношениям, определяемым использованным DGP, а именно,
L234t = 0.5W2 t + W3 t + 2W4 t , L23t = W2 t + 0.5W3 t .
Нетрудно заметить, что оцененные векторы β*(1) и β*(2) являются линейными комбинациями векторов β(1) и β(2) :
β*(1) = – 0.079261 β(1) – 0.198108 β(2) , β*(2) = – 0.202709 β(1) + 0.079211 β(2) .
Приведенные в таблице под оценками коэффициентов оцененные значения их стандартных ошибок дают некоторую ориентацию в отношении того, какими в действительности могут быть компоненты “истинных” коинтегрирующих векторов. Следует только учитывать, что оценки компонент коинтегрирующих векторов не являются нормально распределенными (даже асимптотически).
После получения оценок подходящих коинтегрирующих векторов можно приступать к оцениванию коэффициентов ECM обычными методами. Только и здесь следует учитывать, что асимптотически нормальными являются лишь оценки кратковременной динамики, т.е. коэффициенты при запаздывающих разностях переменных.
В нашем примере получаем:
|
D(L234) D(L23) |
D(WALK2) D(WALK3) D(WALK4) |
ecm1 -0.971220 -0.051197 -0.040351 0.005400 0.031996 (0.11006) (0.06585) (0.04248) (0.04468) (0.04231) (-8.82480) (-0.77748) (-0.94983) (0.12086) (0.75621)
www.iet.ru/mipt/2/text/curs_econometrics.htm

|
Эконометрика. Введение в регрессионный анализ временных рядов. В.П.Носко www.iet.ru |
19 |
ecm2 -0.033474 -1.015363 -0.001894 0.010505 -0.024292 (0.10788) (0.06455) (0.04164) (0.04380) (0.04148) (-0.31028) (-15.7298) (-0.04549) (0.23985) (-0.58571)
Согласно этой таблице оцененная ECM имеет вид
∆(L234)t = – 0.971220 (ecm1)t – 1 – 0.033474 (ecm2)t – 1 + e1t , ∆(L23)t = – 0.051197 (ecm1)t – 1 – 1.015363 (ecm2)t – 1 + e2t , ∆(W2)t = – 0.040351 (ecm1)t – 1 – 0.001894 (ecm2)t – 1 + e3t , ∆(W3)t = 0.005400 (ecm1)t – 1 + 0.010505 (ecm2)t – 1 + e4t , ∆(W4)t = 0.031996 (ecm1)t – 1 – 0.024292 (ecm2)t – 1 + e5t ,
где
(ecm1)t = L234t – 0.499995W2 t – 0.993065W3 t – 2.006077W4 t , (ecm2)t = L23t – 0.991867W2 t – 0.504230W3 t – 0.003537W4 t .
В рамках процедуры Йохансена имеется также возможность проверки гипотез о выполнении дополнительных (“сверхидентифицирующих”) ограничений на коинтегрирующие векторы, например, гипотезы
H0: β25 = 0
о занулении последней компоненты второго коинтегрирующего вектора, или гипотезы
H0: α12 = α21 = α31 = α32 = α41= α42= α51= α52 = 0,
означающей отсутствие составляющей (ecm1)t – 1 во всех уравнениях кроме первого и отсутствие составляющей (ecm2)t – 1 во всех уравнениях кроме второго (что и соответствует использованному процессу порождения данных).
Однако процедура проверки выполнения таких ограничений на коинтегрирующие векторы, как и процедура проверки выполнения тех или иных линейных ограничений на элементы матрицы α корректирующих коэффициентов, не встроена в пакет EVIEWS и требует привлечения для ее реализации других специализированных пакетов статистического анализа данных. (Напомним, что распределения оценок коэффициентов коинтегрирующих векторов и элементов матрицы α не являются асимптотически нормальными.) Проведение детального коинтеграционного анализа нестационарных рядов возможно с использованием макропакета CATS (Cointegration Analysis of Time Series), оформленного в виде процедуры для пакета RATS (Regression Analysis of Time Series). Краткое описание соответствующих процедур с подробными примерами анализа экономических данных можно найти, например, в книге [Patterson (2000)].
Завершая описание процедуры Йохансена, следует обратить особое внимание на следующие обстоятельства.
•Процедура Йохансена исходит из предположения o гауссовости процесса белого шума в VAR модели.
•Процедура Йохансена чувствительна к выбору порядка p модели VAR.
•Используемые критические значения статистик λmax и λtrace – асимптотические, так что при малом количестве наблюдений к полученным выводам следует относиться достаточно осторожно.
www.iet.ru/mipt/2/text/curs_econometrics.htm
|
Эконометрика. Введение в регрессионный анализ временных рядов. В.П.Носко www.iet.ru |
20 |
В связи с последним обстоятельством, при работе с умеренным количеством наблюдений рекомендуется корректировать наблюдаемые значения статистик λmax и λtrace , умножая их на (T – Np) ⁄ T (“коррекция на число степеней свободы”).
Все эти замечания означают, что при коинтеграционном анализе реальных экономических (а не смоделированных) данных интерпретация полученных результатов может оказаться довольно затруднительной.
www.iet.ru/mipt/2/text/curs_econometrics.htm
Vector Error Correction (VEC) Models
A vector error correction (VEC) model is a restricted VAR designed for use with nonstationary series that are known to be cointegrated. You may test for cointegration using an estimated VAR object, Equation object estimated using nonstationary regression methods, or using a Group object (see
“Cointegration Testing”).
The VEC has cointegration relations built into the specification so that it restricts the long-run behavior of the endogenous variables to converge to their cointegrating relationships while allowing for short-run adjustment dynamics. The cointegration term is known as the error correction term since the deviation from long-run equilibrium is corrected gradually through a series of partial short-run adjustments.
To take the simplest possible example, consider a two variable system with one cointegrating equation and no lagged difference terms. The cointegrating equation is:
|
(44.39) |
The corresponding VEC model is:
|
(44.40) |
How to Estimate a VEC
As the VEC specification only applies to cointegrated series, you should first run the Johansen cointegration test as described above and determine the number of cointegrating relations. You will need to provide this information as part of the VEC specification.
To set up a VEC, click the button in the VAR toolbar and choose the Vector Error Correction specification from the VAR/VEC Specification tab. In the VAR/VEC Specification tab, you should provide the same information as for an unrestricted VAR, except that:
• The constant or linear trend term should not be included in the Exogenous Series edit box. The constant and trend specification for VECs should be specified in the Cointegration tab (see below).
• The lag interval specification refers to lags of the first difference terms in the VEC. For example, the lag specification “1 1” will include lagged first difference terms on the right-hand side of the VEC. Rewritten in levels, this VEC is a restricted VAR with two lags. To estimate a VEC with no lagged first difference terms, specify the lag as “0 0”.
• The constant and trend specification for VECs should be specified in the Cointegration tab. You must choose from one of the five Johansen (1995) trend specifications as explained in
“Deterministic Trend Specification”. You must also specify the number of cointegrating relations in the appropriate edit field. This number should be a positive integer less than the number of endogenous variables in the VEC.
• If you want to impose restrictions on the cointegrating relations and/or the adjustment coefficients, use the Restrictions tab.
“Imposing VEC Restrictions” describes these restriction in greater detail. Note that the contents of this tab are grayed out unless you have clicked the Vector Error Correction specification in the VAR/VEC Specification tab.
Once you have filled the dialog, simply click OK to estimate the VEC. Estimation of a VEC model is carried out in two steps. In the first step, we estimate the cointegrating relations from the Johansen procedure as used in the cointegration test. We then construct the error correction terms from the estimated cointegrating relations and estimate a VAR in first differences including the error correction terms as regressors.
VEC Estimation Output
The second part of the output reports results from the second step VAR in first differences, including the error correction terms estimated from the first step. The error correction terms are denoted CointEq1, CointEq2, and so on in the output. This part of the output has the same format as the output from unrestricted VARs as explained in
“Estimation Output”, with one difference. At the bottom of the VEC output table, you will see two log likelihood values reported for the system. The first value, labeled Log Likelihood (d.f. adjusted), is computed using the determinant of the residual covariance matrix (reported as Determinant Residual Covariance), using small sample degrees of freedom correction as in
(44.11). This is the log likelihood value reported for unrestricted VARs. The Log Likelihood value is computed using the residual covariance matrix without correcting for degrees of freedom. This log likelihood value is comparable to the one reported in the cointegration test output.
Views and Procs of a VEC
Views and procs available for VECs are mostly the same as those available for VARs as explained above. Here, we only mention those that are specific to VECs.
Cointegrating Relations
displays a graph of the estimated cointegrating relations as used in the VEC. To store these estimated cointegrating relations as named series in the workfile, use . This proc will create and display an untitled group object containing the estimated cointegrating relations as named series. These series are named COINTEQ01, COINTEQ02 and so on.
Forecasting
To forecast from your VEC, click on the Forecast button on the toolbar and fill out the dialog as described in
“Forecasting”
Data Members
Various results from the estimated VAR/VEC can be retrieved through the command line data members.
“Var Data Members” provides a complete list of data members that are available for a VAR object. Here, we focus on retrieving the estimated coefficients of a VAR/VEC.
Obtaining Coefficients of a VAR
Coefficients of (unrestricted) VARs can be accessed by referring to elements of a two dimensional array C. The first dimension of C refers to the equation number of the VAR, while the second dimension refers to the variable number in each equation. For example, C(2,3) is the coefficient of the third regressor in the second equation of the VAR. The C(2,3) coefficient of a VAR named VAR01 can then be accessed by the command
var01.c(2,3)
To examine the correspondence between each element of C and the estimated coefficients, select from the VAR toolbar.
Obtaining Coefficients of a VEC
For VEC models, the estimated coefficients are stored in three different two dimensional arrays: A, B, and C. A contains the adjustment parameters , B contains the cointegrating vectors , and C holds the short-run parameters (the coefficients on the lagged first difference terms).
• The first index of A is the equation number of the VEC, while the second index is the number of the cointegrating equation. For example, A(2,1) is the adjustment coefficient of the first cointegrating equation in the second equation of the VEC.
• The first index of B is the number of the cointegrating equation, while the second index is the variable number in the cointegrating equation. For example, B(2,1) is the coefficient of the first variable in the second cointegrating equation. Note that this indexing scheme corresponds to the transpose of .
• The first index of C is the equation number of the VEC, while the second index is the variable number of the first differenced regressor of the VEC. For example, C(2, 1) is the coefficient of the first differenced regressor in the second equation of the VEC.
You can access each element of these coefficients by referring to the name of the VEC followed by a dot and coefficient element:
var01.a(2,1)
var01.b(2,1)
var01.c(2,1)
To see the correspondence between each element of A, B, and C and the estimated coefficients, select from the VAR toolbar.
Imposing VEC Restrictions
Since the cointegrating vector is not fully identified, you may wish to impose your own identifying restrictions when performing estimation.
Restrictions can be imposed on the cointegrating vector (elements of the matrix) and/or on the adjustment coefficients (elements of the matrix). To impose restrictions in estimation, open the test, select in the main VAR estimation dialog, then click on the tab. You will enter your restrictions in the edit box that appears when you check the box:
Restrictions on the Cointegrating Vector
To impose restrictions on the cointegrating vector , you must refer to the (i,j)-th element of the transpose of the matrix by B(i,j). The i-th cointegrating relation has the representation:
B(i,1)*y1 + B(i,2)*y2 + … + B(i,k)*yk
where y1, y2, … are the (lagged) endogenous variable. Then, if you want to impose the restriction that the coefficient on y1 for the second cointegrating equation is 1, you would type the following in the edit box:
B(2,1) = 1
You can impose multiple restrictions by separating each restriction with a comma on the same line or typing each restriction on a separate line. For example, if you want to impose the restriction that the coefficients on y1 for the first and second cointegrating equations are 1, you would type:
B(1,1) = 1
B(2,1) = 1
Currently all restrictions must be linear (or more precisely affine) in the elements of the matrix. So for example
B(1,1) * B(2,1) = 1
will return a syntax error.
Restrictions on the Adjustment Coefficients
To impose restrictions on the adjustment coefficients, you must refer to the (i,j)-th elements of the matrix by A(i,j). The error correction terms in the i-th VEC equation will have the representation:
A(i,1)*CointEq1 + A(i,2)*CointEq2 + … + A(i,r)*CointEqr
A(1,1) = A(2,1)
is valid but:
A(1,1) = 1
will return a restriction syntax error.
A(2,1) = 0
To impose multiple restrictions, you may either separate each restriction with a comma on the same line or type each restriction on a separate line. For example, to test whether the second endogenous variable is weakly exogenous with respect to in a VEC with two cointegrating relations, you can type:
A(2,1) = 0
A(2,2) = 0
A(1,1) = 0
B(1,1) = 1
is a valid restriction but:
A(1,1) = B(1,1)
will return a restriction syntax error.
Identifying Restrictions and Binding Restrictions
EViews will check to see whether the restrictions you provided identify all cointegrating vectors for each possible rank. The identification condition is checked numerically by the rank of the appropriate Jacobian matrix; see Boswijk (1995) for the technical details. Asymptotic standard errors for the estimated cointegrating parameters will be reported only if the restrictions identify the cointegrating vectors.
If the restrictions are binding, EViews will report the LR statistic to test the binding restrictions. The LR statistic is reported if the degrees of freedom of the asymptotic -distribution is positive. Note that the restrictions can be binding even if they are not identifying, (e.g. when you impose restrictions on the adjustment coefficients but not on the cointegrating vector).
Options for Restricted Estimation
Once you have filled the dialog, simply click OK to estimate the VEC. Estimation of a VEC model is carried out in two steps. In the first step, we estimate the cointegrating relations from the Johansen procedure as used in the cointegration test. We then construct the error correction terms from the estimated cointegrating relations and estimate a VAR in first differences including the error correction terms as regressors.
№32006 *
Векторные модели авторегрессии и коррекции регрессионных остатков (EViews)
Предлагаемая публикация продолжает консультации по сравнительно новым разделам эконометрического инструментария, которые недостаточно представлены в русскоязычной специальной литературе. Речь пойдет о весьма актуальных в прикладном плане векторных авторегрессионных моделях (Vector Autoregression Models или VAR-моделях) и векторных моделях коррекции регрессионных остатков (Vector Error Correction Models или VEC-моделях)’, а точнее — о том, как использовать возможности пакета «E-VIEWS» (версия 5) при анализе таких моделей. Более развернутое описание самих моделей читатель найдет, например, в книгах Вербика [Вербик,
2006)] и Грина [Green, 2003)].
Публикация подготовлена В.А. Банниковым по материалам руководства пользователя пакета «E-Views» (гл. 24).
При структурном подходе к анализу временных рядов для моделирования соотношений между интересующими нас переменными применяется экономическая теория. К сожалению, экономическая теория часто недостаточно богата, чтобы предоставить динамическую спецификацию, которая приводит к идентифицируемости всех таких соотношений. Кроме того, оценивание и вывод усложняются тем фактом, что эндогенные переменные могут появиться в обеих, левой и правой, частях уравнений.
При моделировании соотношения между несколькими переменными эти проблемы приводят к альтернативным, неструктурным подходам. В этой главе дается оценивание и анализ векторной модели авторегрессии (VAR-модели) и векторной модели коррекции регрессионных остатков (VEC-модели). А также будут описаны инструменты программы EViews для тестирования наличия коинтегрирующих соотношений между несколькими нестационарными переменными.
Векторная модель авторегрессии (УАВ-модель) обычно применяется для систем прогнозирования взаимосвязанных временных рядов и для анализа динамического влияния случайных возмущений на систему переменных. Подход к построению УАВ-моделей обходит потребность в структурном моделировании, рассматривая каждую эндогенную переменную в системе как функцию от лагированных значений всех эндогенных переменных.
1 Отталкиваясь от смысла УЕС-модели, ее правильнее было бы называть «векторная модель коррекции регрессионными остатками», однако приведенное в тексте название более распространено в русскоязычной литературе.
Векторные модели авторегрессии (VAR-модели)
№32006
Математическое представление векторной модели авторегрессии имеет вид:
yt = A1 yt-1 +•••+Apyt-p + Bxt +Ef, (1)
гдеyt — ^-мерный вектор эндогенных переменных, xt — d-мерный вектор экзогенных переменных,
Ab…, Ap и B — матрицы коэффициентов, которые подлежат оцениванию, а st — вектор возмущений остатков.
Возмущения могут быть «одновременно коррелированными», но не с их собственными лаги-рованными значениями и переменными в правой части уравнения2.
Так как в правых частях уравнений появляются только лагированные значения эндогенных переменных, то одновременность не является проблемой, и обычный метод наименьших квадратов (OLS-метод) приводит к состоятельным оценкам. Кроме того, даже при том,
что возмущения st могут быть одновременно коррелированными, OLS-метод эффективен и эквивалентен обобщенному методу наименьших квадратов (GLS-методу), поскольку все уравнения имеют идентичные регрессоры.
В качестве примера предположим, что промышленное производство (IP) и денежная масса (M1) совместно описываются VAR-моделью, и пусть константа будет единственной экзогенной переменной. Предполагая, что VAR-модель содержит два лагированных значения эндогенных переменных, векторную модель авторегрессии можно написать в виде:
IPt = a iiIPt-i + a 12 M1t -i + b „¡Pt-2 + b 12 M1t-2 + Ci +su, (2)
M1t = a 21IPt-1 + a 22 M1t -1 + b 21IPt — 2 + b 22 M1t — 2 + c 2 +s 2t,
где a,, bi, Ci — параметры, подлежащие оцениванию.
Оценивание VAR-модели в программе EViews
В программе EViews для спецификации VAR-модели сначала следует создать VAR-объект. Выберите опцию Quick/Estimate VAR… или в окне команд напечатайте var. В диалоге VAR Specification на странице Basics вы должны определить структуру вашей VAR-модели (рис. 1). Вам следует заполнить диалог со следующей информацией:
• Выберите тип VAR-модели: опцию Unrestricted VAR или Vector Error Correction (VEC).
То, что мы называем VAR-моделью — фактически, это неограниченная VAR-модель.
• Установите выборку оценивания (в окне редактирования Estimation Sample).
• В соответствующее окно редактирования (Lag intervals for Endogenous) введите спецификацию лагов. Эта информация вводится попарно: каждая пара чисел определяет диапазон лагов. Например, показанная на рис. 1 лаговая пара:
1 4
говорит программе EViews: использовать в правых частях уравнений системы в качестве переменных все эндогенные переменные с лагами от первого до четвертого порядка.
2 «Одновременная коррелированность» компонент вектора остатков е( = (е1г, е2(,..ей) означает возможность отличия от нуля ковариаций cov (е*, е^) для некоторых / и] (/Ф]), но при одном и том же Г. — Прим. переводчика.
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
№32006
Рис. 1. Диалоговое окно для определения структуры VAR-модели
Вы можете добавить любое число интервалов лагирования, притом все интервалы лаги-рования вводите попарно. При лаговой спецификации:
2 4 6 9 12 12
применяются лаги 2-4, 6-9 и 12.
• В соответствующие окна редактирования (Endogenous Variablies и Exogenous Variablies) введите имена эндогенных и экзогенных рядов. На рис. 1 в качестве эндогенных рядов мы ввели IP, M1 и TB3, а в качестве постоянного экзогенного члена применили специальный ряд C. Если бы список рядов был длиннее, то мы могли бы создать объект группы с именем, содержащим этот список, а затем ввести имя этой группы.
Остальные страницы диалога VAR Specification (страницы Cointegration и VEC Restrictions) уместны только для VEC-моделей, что объясняется ниже.
Вывод результатов оценивания VAR-модели
Как только вы специфицировали VAR-модель, щелкните OK. Программа EViews отобразит результаты оценивания в окне VAR (рис. 2).
Каждый столбец в таблице соответствует уравнению в VAR-модели. Для каждой переменной в правой части соответствующего уравнения программа EViews сообщает оцененные коэффициенты, их стандартные ошибки и f-статистики. Например, коэффициент при переменной IP(-1) в уравнении TB3 равен 0,095984.
Программа EViews отображает дополнительную информацию под резюме коэффициентов (рис. 3). Первая часть дополнительного вывода представляет стандартные статистики
№32006
Ж Var: VAFI1 Workfile: VARUVarl m ISJiÜ
View |Prac| Object | Print| Name| Freeze| EstimatE| 5tats| Impulse! Resids|
Vector Autoregression Estimates
VectorAutoregression Estimates Date: 01/15/04 Time: 11:31 Sample (adjusted): 1 959:05 1989:12 included obser>ations: 368 after adjusting endpoints Standard errors in () &. t-statistics in [] A 1
IP M1 TB3
IP(-1) 1.253934 (0.05401) [23.21 47] 0.25321 5 (0.17769) [ 1.42501 ] 0.095984 (0.05021) [1.911 7Ü] «
IP(-2) -0.1 37774 (0.08557) 1-2.19448] -0.230187 (0.28149) [-0.81 7T4] 0.01 5590 (0.07954) [0.19601]
IP(-3) -0.00378D (0.08556) 1 Г-l ni i A .1 -0.15351 5 (0.28146) r n Г i r i ^11 -0.1 73824 (0.07953) Г Л i-,7- “Г .“Л
Рис. 2. Результаты оценивания коэффициентов VAR-модели
IШ Vat VAR1 Workfile: VAR1 Wail НШ
View|Prac|object| Prirtt| Name | Freeze| Estimate Stats| Impulse| Resids| |
Vector Autoregression Estimates |
1 U.i 1 .Г ч U U UJ [■I .ZJi JJJ 1
R-squared 0.999221 0.999915 a.96901 9
Adj. R-squared 0.9991 95 0.999912 a.966937
Sum sq. resids 113.8813 1232.453 98.39849
S.E. equatiDn 0.566385 1.363249 a.526478
F-statistic 37950.20 347533.2 395.4048
Log 1 i ke 1 i h a o d -Э06.Э509 -744.5662 -279.4629
AkaikeAlC 1.735603 4.11 72D8 1.589472
Schwarz SC 1.873660 4.2552Б5 1.727529
Mean dependent 70.9791 9 339.7451 G.333891
S.D. dependent 1 9.95932 198.63D1 2.895381
Determinant resid covariance (düf adj.) 0.289218
Determinant resid covariance 0.259637
Lüg likelihood -1 21 S.2QÜ ±i’.’
Akaike information criterion 7.377118 :j::j::j
Schwanz criterion 7.791200 Tj
Рис. 3. Сводка статистических показателей для VAR-модели
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
N932006
OLS-регрессии для каждого уравнения. При вычислении использовались остатки для каждого уравнения в отдельности. Результаты отображены в соответствующем столбце. Числа в самой нижней части таблицы — итоговые статистики для VAR-системы в целом.
Определитель остаточной ковариационной матрицы (степени свободы скорректированы) вычисляется по формуле:
|Q | = det . (3)
При нескорректированных степенях свободы вформуле (3) число параметров p исключается. При предположении многомерного нормального (гауссовского) распределения значение логарифмической функции правдоподобия вычисляется в виде:
1 = — T {k(1 + log2rn ) + log|Q |}. (4)
Два информационных критерия (Акаике и Шварца) вычисляются по формулам:
A1C =-21/ T + 2n/T,
SC =-21/ T + nlogT/T, (5)
где n = k(d + pk) — общее число оцененных параметров в VAR-модели.
Эти информационные критерии можно использовать для выбора модели, например, для определения длины лагирования в VAR-модели. Здесь предпочтительнее модели с меньшими значениями информационного критерия. Стоит отметить, что в некоторых литературных источниках информационные критерии AIC и SC могут определяться иначе: либо исключением из функции правдоподобия «несущественных» постоянных членов, либо исключением деления на T.
Представления и опции Procs (процедуры) для VAR-модели
Как только вы оценили VAR-модель, программа EViews осуществляет различные представления для работы с оцененной VAR-моделью. В этом параграфе мы обсудим те из них, которые являются специфическими для VAR-модели.
Представления диагностики
В окне VAR для различных представлений диагностики имеются меню View/Lag Structure и View/Residual Tests. Они предназначены для того, чтобы помочь проверить правомерность оцененной VAR-модели.
Меню View/Lag Structure (лаговая структура)
Опции ARRootsTable/Graph (Таблица/график AR-корней). С помощьюэтихопций сообщаются обратные корни характеристического AR-полинома [Lütkepohl (1991)]. Оцененная VAR-модель стационарна, если все обратные корни по модулю меньше единицы и находятся внутри единичного круга. Если VAR-модель не стационарна, то определенные результаты (например, стандартные ошибки отклика на импульс) недопустимы. Существует k • p корней, где k — число эндогенных переменных, а p — наибольший лаг. Если вы оцениваете VEC-модель с r коинтегрирующими соотношениями, то k — r корней должны равняться единице.
100
№32006
Опция Granger Causality/Block Exogeneity Tests (парные тесты причинно-следственной зависимости по Грэнжеру). С помощью этой опции выполняются парные тесты причинно-следственной зависимости по Грэнжеру, посредством которых проверяется, можно ли эндогенную переменную рассматривать как экзогенную. Для каждого уравнения в VAR-модели вывод результатов отображает %2-статистику (Вальда) совместной значимости эндогенной переменной этого уравнения с каждой другой лагированной эндогенной переменной. Статистика в последней строке (All) — %2-статистика совместной значимости эндогенной переменной этого уравнения со всеми другими лагированными эндогенными переменными.
Предупреждение: если вы оценили VEC-модель, то на исключение тестируются только телагированные переменные, которые являются первыми разностями. Лагированныеуров-невые члены в коинтегрирующихуравнениях (члены коррекции регрессионных остатков) не тестируются.
Опция LagExclusion Tests (тесты на исключение лагов). С помощью этой опции для лага каждого порядка в VAR-модели выполняется тестирование на исключение этоголага. Для каждого уравнения в отдельности, для лага каждого порядка сообщается %2-статистика (Вальда) совместной значимости всех лагированных эндогенных переменных с лагом этого порядка в совокупности для всех уравнений (последний столбец).
Опция LagLength Criteria (критерии длины лагирования). С помощью этой опции для неограниченной VAR-модели, чтобы выбрать порядок лагирования, вычисляются различные критерии. Вам будет предложено — специфицировать максимальный порядок лага для «тестирования». Таблица отображает различные информационные критерии для лагов всех порядков, вплоть до лага специфицированного максимального порядка. (Если в VAR-модели нет экзогенных переменных, то лагирование начинается с единицы;в противном случае — с нуля). В таблице для каждого критерия (в столбце) указывается выбранный порядок лагирования, помеченный звездочкой (*). Для столбцов 4-7 это порядок лага с наименьшим значением критерия [Lütkepohl (1991)].
Последовательный модифицированный тест отношения правдоподобия (LR) выполняется следующим образом. Начиная с лага максимального порядка, тестируется нулевая гипотеза, что все коэффициенты при переменных с лагом порядка 1 совместно равны нулю. Для тестирования применяются %2-статистики:
LR = (T — m)log| Q1 -1| — log| Q11 -% 2(k2), (6)
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
где m — число параметров на уравнение при альтернативной гипотезе.
Отметим, что используется модификация для малой выборки Симса [Sims (1980)], где применяется множитель T — m, а не T. Мы сравниваем модифицированные LR-статистики с 5%-ми критическими значениями. Начиная с лага максимального порядка, уменьшаем его порядок на единицу — до тех пор, пока не получим первое отклонение нулевой гипотезы. Альтернативный порядок лага при первом отклонении нулевой гипотезы помечается звездочкой (если нулевая гипотеза не отвергается, то минимальный порядок лага будет помечен звездочкой). Стоит подчеркнуть, что, хотя индивидуальный тест имеет размер 0,05, его полный размер не будет соответствовать 5% [Lütkepohl (1991)].
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
N932006
Меню View/Residual Tests (тестирование остатков)
Опция Correlograms (коррелограммы). С помощью этой опции для специфицированного числа лагов отображаются парные перекрестные коррелограммы (выборочные автокорреляции) оцененных остатков VAR-модели. Перекрестные коррелограммы могут отображаться в трех различных форматах. Предоставляются две табличные формы, в одной форме представление упорядочено по переменным (опция Tabulate by Variable), а в другой — по лагам (опция Tabulate by Lag). Форма Graph отображает матрицу парных перекрестных кор-релограмм. Пунктирные линии на каждом графике представляют плюс или минус два, умноженное на асимптотическую стандартную ошибку лагированных корреляций (вычисленную как l/V7).
Опция Portmanteau Autocorrelation Test. С помощью этой опции для остаточной сериальной корреляции до специфицированного порядка вычисляются многомерные Q-статистики Бокса-Пирса/Льюнга-Бокса (Box-Pierce/Ljung-Box) [LUtkepohl (1991)]. Программа EViews предоставляет как обычные Q-статистики, так и скорректированные (с коррекцией для малых выборок). При нулевой гипотезе отсутствия сериальной корреляции вплоть до лага порядка h обе статистики приближенно распределены как %2 со степенями свободы k2(h-p), где p — порядок лага VAR-модели. Асимптотическое распределение приближенно в том смысле, что для него требуется, чтобы MA-коэффициенты (коэффициенты скользящего среднего) равнялись нулю для лагов порядка i > h — p. Поэтому, если корни AR-полинома (полинома авторегрессии) будут близки единице и лаг h мал, то эта аппроксимация некорректна. Фактически, степени свободы для h < p становятся отрицательными.
Опция Autocorrelation LM Test (тест множителей Лагранжа для автокорреляций).
С помощью этой опции сообщаются многомерные статистики LM-теста (теста множителей Лагранжа) остаточной сериальной корреляции вплоть до специфицированного порядка. Критическая статистика для лага порядка h вычисляется построением вспомогательной регрессии остатков ut на исходные регрессоры в правой части уравнения и на лагированные остатки ut-h, для которых недостающие первые h значения заполняются нулями [Johansen (1995)]. При нулевой гипотезе отсутствия сериальной корреляции порядка h, LM-статистика асимптотически распределена как %2 с k2 степенями свободы.
Опция Normality Test (Тестирование на нормальное распределение). С помощью этой опции выполняются многомерные расширения теста Джаркви-Бера (Jarque-Bera) для проверки гипотезы нормального распределения остатков. В процессе тестирования третьи и четвертые моменты остатков сравниваются с соответствующими моментами нормального распределения. Для многомерного теста следует выбрать факторизацию kостатков, которые ортогональны друг другу (дополнительное обсуждение необходимости в ортогонализа-ции — в разделе «Отклики на импульсы»).
Пусть P будет матрицей факторизации, так что:
yf = Put ~ N(0,1k),
(7)
где ut — ведомые остатки.
Определим векторы третьих и четвертых моментов:
т 3 =Хл7 т и т 4 = Х/4/Т. Тогда при нулевой гипотезе нормального распределения:
л/Т
№32006
~ m 3 » ( 61 0 «
^ N 0,
m 4 — 3 V. 0 24/* _
(8)
Так как каждая компонента независима от других, мы можем построить %2-статистику, суммируя квадраты всех третьих и четвертых моментов.
Программа EViews предоставляет нам выбор матрицы факторизации:
• Опция Choleskyof covariance (ковариация Чолески) [Lütkepohl (1991)]: матрица Pявляется обращением нижней треугольной матрицы (фактором Чолески) в разложении Чолески для остаточной ковариационной матрицы. Получающиеся в результате критические статистики зависят от упорядочения переменных в VAR-модели.
• Опция Inverse Square Root of Residual Corrélation Matrix (обратный квадратный корень из остаточной корреляционной матрицы) [Doomik, Hansen (1994)]: матрица P — HA~1/2H’ V, где A — диагональная матрица, содержащая на диагонали собственные значения остаточной корреляционной матрицы, H — матрица, столбцы которой являются соответствующими собственными векторами, а V — диагональная матрица, содержащая на диагонали обратные квадратные корни из остаточных дисперсий. По-существу, эта матрица P является обратным квадратным корнем из остаточной корреляционной матрицы. Тест инвариантен к упорядочению и к масштабу переменных в VAR-модели. Перед вычислением статистики мы выполняем коррекцию для малых выборок для преобразованных остатков vt [Doomik, Hansen (1994)].
• Опция Inverse Square Root of Residual Covariance Matrix (обратный квадратный корень из остаточной ковариационной матрицы) [Urzua (1997)]: матрица P — GD~^2G’, где D — диагональная матрица, содержащая на диагонали собственные значения остаточной ковариационной матрицы, а G — матрица, столбцы которой являются соответствующими собственными векторами. Этот тест имеет специфическую альтернативную гипотезу — биквадратное экспоненциальное распределение. Это распределение — «наиболее вероятная» альтернатива многомерному нормальному распределению с конечными четвертыми моментами, поскольку его можно аппроксимировать многомерным семейством распределений Пирсона «настолько близко, насколько необходимо» [Urzua (1997)]. Перед вычислением статистики мы производим коррекцию преобразованных остатков vt для малых выборок. Эта коррекция для малых выборок отличается от коррекции, используемой в рукописи Хансена [Doornik, Hansen (1994)].
• Опция Factorization from Identified (Structural) VAR (факторизация из идентифицированной (структурной) VAR-модели): матрица P — B_1A, где матрицы A и B оцениваются из структурной VAR-модели. Эта опция доступна, если вы оценили матрицы факторизации A и B, используя структурную VAR-модель.
Критические статистики сообщаются программой EViews для каждой ортогональной компоненты (RESIDI, RESID2 и так далее) и для объединенного теста. Для индивидуальных компонент оцененная асимметрия и эксцесс приводятся в первых двух столбцах вместе
103
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
На32006
с p-значениями из %2-распределения (в квадратных скобках). В столбце Jarque-Bera сообщается:
с р-значениями из %2(2)-распределения.
Замечание. В отличие от статистики Джаркви-Бера (]агцие-8ега), вычисленной в представлении ряда, эта статистика не вычисляется с использованием коррекции степеней свободы.
Для совместных тестов, обычно, сообщается:
Однако, если вы выбираете тестУрзуа [Urzua (1997)], то X будет не только использовать сумму квадратов «чистых» третьих и четвертых моментов, но также будет включать сумму квадратов всех перекрестных третьих и четвертых моментов. В этом случае X асимптотически распределена как %2 с k(k + 1)(k + 2)(k + 7)/24 степенями свободы.
Опция White Heteroskedasticity Test (тест Уайта на наличие гетероскедастичности).
Эти тесты являются расширением теста Уайта [White (1980)] на системы уравнений, что обсуждалось в статье Кележьяна [Kelejian, 1982) и рукописи Дурника [Doornik (1995)]. Тестовая регрессия строится посредством регрессии каждого перекрестного произведения остатков на перекрестные произведения регрессоров и тестируется как совместная значимость регрессии. Опция No CrossTerms используеттолько уровни и квадраты исходных регрессоров, в то время как опция With Cross Terms включает все неизбыточные перекрестные произведения исходных регрессоров в тестовом уравнении. Тестовая регрессия всегда включает в качестве регрессора постоянный член.
Первая часть вывода для каждой тестовой регрессии отображает совместную значимость регрессоров, за исключением постоянного члена. Можно считать, что каждая тестовая регрессия представляет собой тестирование постоянства каждого элемента в остаточной ковариационной матрице в отдельности. При нулевой гипотезе отсутствия гетероскедастичности, или, если нет неправильной спецификации, непостоянные регрессоры не должны быть совместно значимыми.
Последняя строка таблицы вывода результатов показывает LM-статистику для совместной значимости всех регрессоров в системе тестовых уравнений [Doornik (1995)]. LM-статистика системы уравнений распределена как %2 с mn степенями свободы, где m — k (k +1)/2— число перекрестных произведений остатков в системе, а n — общее число переменных в правых частях уравнений в тестовой регрессии.
Замечания относительно сравнимости диагностических тестов
Многие из описанных выше диагностических тестов можно вычислить «вручную», оценив VAR-модель, применив объект системы уравнений и выбрав опцию View/Wald Coefficient
(9)
X3 -Tm’s m3/6 2(k);
X4 — T(m4 -3)'(m4 -3)/24 2(k);
X — X3 +X4 2(2k).
(10)
№32006
Tests…. Мы должны предостеречь, что по разным причинам результаты для этой системы уравнений не будут соответствовать результатам диагностических представлений для VAR-модели:
• В общем, объект системы уравнений будет использовать максимально-возможные наблюдения для каждого уравнения в системе. В отличие от этого, в случае, если имеются пропущенные значения, VAR-объекты порождают сбалансированную выборку.
• Оценки матрицы весов, применяемой при оценивании системы уравнений, не содержат коррекцию степеней свободы (остаточные суммы квадратов делятся на T а не на T — к), вто время какдля оценокVAR-модели эта коррекция выполнима. Даже при применении оцененных сопоставимых спецификаций, приводящих к тождественным коэффициентам, критические статистики для SUR-системы (системы внешне не связанных между собой регрессий) и для VAR-модели приведут к небольшим (асимптотически незначимым) различиям.
Отклики на импульсы
Импульс на i-ую переменную не только непосредственно затрагивает i-ую переменную, нотакже черездинамическую (лаговую) структуру VAR-модели передается всем другим эндогенным переменным. Функция отклика на импульс отслеживает влияние на текущие и будущие значения эндогенных переменных одноразового импульса на одно из возмущений.
Если возмущенияst одновременно некоррелированны, то интерпретация отклика на импульс прямая. i-ое возмущение si,t — просто импульс на i-ую эндогенную переменную yi,t. Однако возмущения обычно коррелированны, и их можно рассматривать как имеющие общую компоненту, которая не может быть связана со специфической переменной. Чтобы интерпретировать импульсы, обычно к возмущениям следует применить такое преобразование P чтобы они стали некоррелированными:
Vt = Pst ~(0, D), (11)
где D — диагональная ковариационная матрица.
Как объясняется ниже, программа EViews предоставляет несколько опций для выбора P.
Чтобы получить функции отклика на импульсы, сначала оцените VAR-модель. Затем на панели инструментов VAR-объекта выберите опцию View/Impulse Response…. Вы увидите диалоговое окно с двумя страницами: Display и Impulse Definition (рис. 4).
Страница диалога Display предоставляет следующие опции:
• Display Format: с помощью этого блока опций отображаются либо табличные, либо графические результаты. Имейте в виду, что, если вы выбираете опцию Combined Graphs, то блок опций Response Standard Errors будет игнорироваться, и стандартные ошибки отображаться не будут. Отметим также, что при выводе в табличном формате проводится упорядочение по переменным отклика, а не по импульсным переменным.
• Display Information: в этом блоке опций следует ввести переменные, для которых вы хотите генерировать возмущения (ввести эти переменные в редактируемое окно Impulses), и переменные, для которых вы хотите наблюдать отклики (ввести эти переменные в редактируемое окно Responses). Вы можете либо ввести имена эндогенных переменных, либо числа,
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
№32006
Impulse Responses
Display I In-pulse Definition |
Display Format—————
С Table
(* Mulliple Graphs Combined Graphs
-Response Standard Errors-С None
(* Analytic (asymptotic)
С Monte Carlo
Repetitions: 11 □□
-Display Inlormation-impüses:
ip ml tb3 d
d
Responses:
ip ml tb3 d
d
Periods: |10
I- Accumulated Responses
□I
OK. Cancel
Рис. 4. Диалоговое окно для задания функции отклика на импульсы
соответствующие порядковым номерам переменных. Например, если вы специфицировали VAR-систему с помощью переменных GDP, M1, CPI, то можете напечатать либо:
GDP CPI M1
либо: 1 3 2
Порядок, в котором вводятся эти переменные, влияеттолько на отображение результатов.
Чтобы отследить функцию отклика, следует специфицировать положительное целое для числа периодов. Чтобы отобразить накопленные отклики, сделайте отметку в окошке выбора Accumulate Response. Для стационарных VAR-моделей отклики на импульсы должны затухать на нуле, а накопленные отклики должны асимптотически сходиться к некоторой (отличной от нуля) константе.
• Response Standard Errors: в этом блоке предоставляются опции для вычисления стандартных ошибок откликов. Заметим, что для определенных выборов переменных в редактируемом окне Impulse и для векторных моделей коррекции остатков (VEC-модели) опции Analytic и/или Monte Carlo для выбора стандартных ошибок в настоящее время не доступны. Если для вычисления стандартных ошибок выбирается опция Monte Carlo, то в соответствующем окне редактирования (Repetitions) следует специфицировать число применяемых повторений.
В случае выбора табличного формата, оцененные стандартные ошибки будут представлены в круглых скобках ниже откликов. Если вы захотите отобразить результаты в формате множественных графиков, то график будет содержать полосы (плюс/минус две стандартные
106
№32006
ошибки) около откликов на импульсы. Линии стандартных ошибок на объединенных графиках не отображаются.
Страница Impulse Definition предоставляет следующие опции преобразования импульсов:
• Residual — One Unit: с помощью этой опции на остатки устанавливается воздействие единичных импульсов. Она игнорирует единицы измерения и корреляции в остатках VAR-модели, поскольку никакое преобразование не выполняется. Для этой опции отклики — MA-коэффициенты бесконечного MA-порядка в представлении Вольда (Wold) для VAR-модели.
• Residual — One Std. Dev.: с помощью этой опции устанавливается воздействие импульсов с величинами в одно среднеквадратичное отклонение остатков. Она игнорирует корреляции в остатках VAR-модели.
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
• Cholesky: при выборе этой опции для ортогонализации импульсов применяется обращение нижней треугольной матрицы (фактор Чолески) в разложении Чолески остаточной ковариационной матрицы. С помощью этой опции налагается упорядочение переменных в VAR-модели и весь эффект любой общей компоненты приписывается переменной, которая первой входит в VAR-систему. Отметим, что при изменении упорядочения переменных, отклики могут изменяться разительно. Вы можете специфицировать различное упорядочение вVAR-системе, повторно заказывая переменные вокне редактирования Cholesky Ordering.
Если оценивание остаточной ковариационной матрицы применяется для получения обращения нижней треугольной матрицы (фактора Чолески) в разложении Чолески, то с помощью опции d.f. adjustment (коррекция степеней свободы) проводится коррекция степеней свободы для малых выборок. (i,у)-ый элемент остаточной ковариационной матрицы с коррекцией степеней свободы вычисляется как
Efei,feW(T ~ ^
где p — число параметров на уравнение в VAR-системе.
С помощью опции no d.f. adjustment оценивается (i,у)-ый элемент остаточной ковариационной матрицы как
Ъе«е»1Т.
Замечание. Предшествующие версии программы EViews вычисляли импульсы, используя фактор Чолески из остаточной ковариационной матрицы без коррекции степеней свободы.
• С помощью опции Generalized Impulses (обобщенные импульсы) строится ортогональное множество возмущений, как это описано у Песарана и Шина [Pesaran, Shin (1998)], которое не зависит от упорядочения в VAR-системе. Отклики обобщенного импульса на возмущение j-ой переменной получаются применением переменного специфического фактора Чолески, вычисленного с j-ой переменной вверху упорядочения Чолески.
• При применении опции Structural Decomposition (структурное разложение) используется ортогональное преобразование, оцененное из структурных матриц факторизации. Этот подход не доступен, если вы не оценили структурные матрицы факторизации, как объясняется в разделе «Структурные (идентифицируемые) VAR-модели».
• User Specified (импульсы, специфицированные пользователем) позволяет специфицировать ваши собственные импульсы. Создайте матрицу (или вектор), которая будет содер-
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
На32006
жать импульсы, и напечатайте имя этой матрицы в окне редактирования. Если УДВ-модель имеет к эндогенных переменных, то матрица импульсов должна иметь к строк и один или к столбцов, где каждый столбец — это вектор импульсов.
Например, если в УДВ-системе вы имеете число эндогенных переменных к — 3 и хотите одновременно применить положительный единичный импульс для первой переменной и отрицательный единичный импульс для второй переменной, то следует создать 3 X1 матрицу импульсов, содержащую значения 1, -1 и 0. Вы можете ввести команды:
Несмотря на то, что функции отклика на импульсы отслеживают эффекты воздействия одной эндогенной переменной на другие переменные в VAR-модели, декомпозиция дисперсии разделяет вариацию эндогенной переменной на компоненты воздействия в VAR-модели. Таким образом, декомпозиция дисперсии предоставляет информацию об относительной важности каждого случайного возмущения в воздействии на переменные в VAR-системе.
Чтобы получить декомпозицию дисперсии, на панели инструментов объекта var выберите опцию View/Variance Decomposition… Теперь вам следует предоставить туже самую информацию, что и для откликов на импульсы выше. А поскольку неортогональная факторизация приводит к декомпозициям, которые не удовлетворяют свойству сложения, ваш выбор факторизации ограничивается ортогональными факторизациями.
Формат таблицы отображает декомпозицию на отдельные дисперсии для каждой эндогенной переменной. Второй столбец, помеченный «S.E.», содержит ошибку прогноза переменной в заданном горизонте прогнозирования. Источник этой ошибки прогноза — вариация в текущих и будущих значениях возмущений каждой эндогенной переменной в VAR-модели. Остальные столбцы предоставляют проценты дисперсии прогноза, обусловленные каждым возмущением, и в сумме по каждой строке составляют 100%.
Как и в случае с откликами на импульсы, если изменить упорядочение переменных в VAR-модели, декомпозиция дисперсии, основанная на факторе Чолески, может разительно изменяться. Например, декомпозиция первого периода для первой переменной в упорядочении VAR-модели полностью обусловлена ее собственным возмущением.
Факторизация, основанная на структурной ортогонализации, доступна, если только вы оценили структурные матрицы факторизации, как объясняется в разделе «Структурные (идентифицируемые) VAR-модели». Отметим, что стандартные ошибки прогноза должны быть идентичны стандартным ошибкам из факторизации Чолески, если только структурная VAR-модель идентифицируема. Для сверхидентифицируемых структурных VAR-моделей стандартные ошибки прогноза могут отличаться, чтобы сохранять свойство сложения.
Опции Procs (процедуры) VAR-объекта
Большинство процедур, доступных для VAR-объекта, обычно те же, что и для объекта системы уравнений. Здесь мы обсудим только те, которые уникальны для VAR-объекта.
Matrix (3,1) shock shock.fill (by=c) 1, -1,0
и в окне редактирования напечатать имя матрицы SHOCK.
Декомпозиция (разложение) дисперсии
№32006
Опция Make System (создание системы)
С помощью Make System создается объект системы уравнений, который содержит эквивалентную VAR-спецификацию. Если вы хотите оценить нестандартную VAR-модель, то можете использовать эту опцию как быстрый способ специфицировать VAR-модель в объекте системы уравнений, которую затем можно модифицировать, чтобы удовлетворить своим потребностям. Например, несмотря на то, что VAR-объект требует, чтобы каждое уравнение имело одну и туже структурулагирования, можно ослабить это ограничение. Чтобы оценить VAR-модель с несбалансированной лаговой структурой, используйте процедуру Proc/Make System, создайте VAR-систему со сбалансированной лаговой структурой и отредактируйте ее спецификацию в соответствии с желаемой структурой лагирования.
Применение опции By Variable создает систему, спецификация которой (и порядковые номера коэффициентов) упорядочивается по переменным. Если хотите отредактировать спецификацию, чтобы исключить лаги определенной переменной из некоторых уравнений, примените эту опцию. С помощью опции By Lag создается система, спецификация которой (и порядковые номера коэффициентов) упорядочивается по лагам. Если хотите отредактировать спецификацию, чтобы исключить определенные лаги из некоторых уравнений, используйте эту опцию.
В векторной модели коррекции остатков (в VEC-модели) обработка коэффициентов коин-тегрирующего вектора как дополнительных неизвестных коэффициентов приводит получающуюся в результате систему к неидентифицируемости. В этом случае программа EViews создаст объект системы, коэффициенты которой для коинтегрирующих векторов устанавливаются к оцененным значениям коэффициентов VEC-модели. Если вы хотите оценить коэффициенты коинтегрирующего вектора в системе, то можете отредактировать спецификацию, но прежде удостоверьтесь, что получающаяся система идентифицируема.
Следует также отметить, что, в то время как стандартную VAR-модель можно эффективно оценить с помощью обычного метода наименьших квадратов (OLS-метода), примененного последовательно к каждому уравнению в отдельности, для модифицированной спецификации это не так. Вы можете применить один из методов оценивания всей системы (например, SUR-метод), оценивая нестандартные VAR-модели с использованием объекта системы.
Опция Estimate Structural Factorization (оценивание структурной факторизации)
Эта процедура применяется, чтобы оценить матрицы факторизации для структурной (или идентифицируемой) VAR-модели. Подробное описание деталей этой процедуры приводится в разделе «Структурные (идентифицируемые) VAR-модели». Итак, для начала, вам следует оценить матрицы структурной факторизации, чтобы применить структурные опции Impulse Responses и Variance Decompositions.
Структурные (идентифицируемые) VAR-модели
Главная цель структурногоVAR-оценивания (SVAR-оценивания) состоит втом, чтобы получить нерекурсивную ортогонализацию членов остатков для анализа откликов на импульсы. Эта альтернатива рекурсивной ортогонализации Чолески требует, чтобы пользователь наложил достаточное число ограничений для идентифицируемости ортогональных (структурных) компонент членов остатков.
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
N932006
Пусть у, — ^-элементный вектор эндогенных переменных И пусть 2 = Е[е,, е’ ] будет остаточной ковариационной матрицей. Следуя Амисано и Джанини [АтнБапо, С1апп1п! (1997)], класс БУАВ-моделей, который оценивается программой ЕУ^б, можно написать как:
Ле{ = Виг, (12)
где е, и и, — векторы длины к.
Вектор е, является наблюдаемым остатком (или остатком приведенной формы), тогда как и,является ненаблюдаемым структурным возмущением. Матрицы Л и В — к хк матрицы, которые подлежат оцениванию. Предполагается, что структурные возмущения и, являются орто-нормированными, т. е. их ковариационная матрица — единичная матрица. Предположение ортонормированности возмущений и, налагает следующие идентифицирующие ограничения на матрицы Л и В:
Л2Л’ = В В’. (13)
Отметим, что выражения в обеих частях уравнения (13) являются симметричными, что налагает к (к +1)/2 ограничений на 2к2 неизвестных элементов в матрицах Л и В. Поэтому, чтобы идентифицировать матрицы Л и В Вам следует наложить, по крайней мере, 2к2 — к (к +1)/2 = к (3к -1)/2 дополнительных ограничений.
Спецификация идентифицирующих ограничений
Как объяснялось выше, чтобы оценить ортогональные матрицы факторизации Л и В, следует наложить дополнительные идентифицирующие ограничения. Мы различаем два типа идентифицирующих динамических ограничений: краткосрочные и долгосрочные ограничения. Любой тип идентифицирующих ограничений можно специфицировать либо в виде текста, либо с помощью матриц отображения.
Спецификация краткосрочных динамических идентифицирующих ограничений с помощью матриц отображения
Для многих проблем идентифицирующие ограничения на матрицы Л и В — это простые нулевые ограничения исключения. В этом случае вы можете специфицировать ограничения, создавая матрицы «отображения» с соответствующими присвоенными именами для матриц Л и В. Любые элементы матрицы отображения, которые вы хотите оценить, должны иметь пропущенное значение «МЛ». Все непропущенные значения в матрице отображения будут содержать фиксированные специфицированные значения.
Предположим, что вы хотите представить матрицу Л нижней треугольной матрицей с единицами на главной диагонали, а матрицу В — диагональной матрицей. Тогда матрицы отображения (для к = 3 переменных УАВ-модели) были бы следующими:
(14)
Вы можете создать эти матрицы в интерактивном режиме. Просто примените опцию Object/New Object…, чтобы создать две новые матрицы, A и B, а затем для редактирования
4 0 0^ ‘ NA 0 0 N
A = NA 1 0 , в = 0 NA 0
NA V NA Ъ 0 V 0 NAy
№32006
значений используйте представление крупноформатной таблицы. Альтернативно, можно ввести следующие команды:
Matrix (3,3) pata
‘ fill matrix in row major order
pata.fill (by=r) 1,0,0, na, 1,0, na, na, 1
matrix (3,3) patb = 0
patb (1,1) = na
patb (2,2) = na
patb(3,3) = na
Как только созданы матрицы отображений, из меню окна VAR-объекта выберите опцию Proc/Estimate Structural Factorization…. В диалоге SVAR Options щелкните кнопки Matrix и Short-Run Pattern, и в соответствующих окнах редактирования напечатайте имена матриц отображения.
Спецификация краткосрочных динамических идентифицирующих ограничений
в виде текста
Для более общих ограничений можно специфицировать идентифицирующие ограничения в виде текста. В текстовом виде выписываем соотношение Aet = But как систему уравнений, идентифицируя каждый элемент векторов et и ut с помощью специальных символов. Элементы матриц A и B, которые подлежат оцениванию, должны специфицироваться в виде элементов вектора коэффициентов.
Для примера снова предположим, что вы имеете к = 3 эндогенных переменных в VAR-модели, где хотите ограничить матрицу A нижней треугольной матрицей с единицами на главной диагонали, а матрицу B установить диагональной матрицей. В соответствии с этими ограничениями соотношение Aet = But можно написать в виде:
e i = b „и i,
e 2 = —a 21 e i + Ь jjU 2,
e 3 =— a 3i e 1 — a 32 e 2 + b 33U 3. (15)
Чтобы специфицировать эти ограничения в виде текста, из окна VAR-объекта выберите опцию Proc/Estimate Structural Factorization… и щелкните кнопку Text. В окне редактирования напечатайте следующее:
@e1 =c(1)*@u1
@e2 = -c(2)*@e1 + c(3)*@u2
@e3 = -c(4)*@e1 — c(5)*@e2 + c(6)*@u3
Специальные ключевые символы «@e1», «@e2», «@e3» представляют первый, второй и третий элементы вектора et, в то время как символы «@u1», «@u2», «@u3» представляют
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
N932006
первый, второй и третий элементы вектора ц(. В этом примере все неизвестные элементы матриц Л и В представляются элементами вектора коэффициентов С.
Идентифицируемые ограничения, содержащиеся в равенстве Aet — B ut, обычно называются краткосрочными динамическими ограничениями. Есть альтернативный метод идентифицируемости с помощью ограничений долгосрочных динамических свойств откликов на импульсы [Blanchard, Quah (1989)]. Кумулятивный долгосрочный динамический отклик C на структурные возмущения имеет вид:
где= (I- Д -… — Ар) 1 — оцененные кумулятивные (накопленные) отклики на (наблюдаемые) воздействия приведенной формы.
Долгосрочные динамические идентифицирующие ограничения специфицируются в терми-нахэлементов матрицы С, какправило, ввиде нулевыхограничений. Ограничение С1у- — 0оз-начает, что (накопленный) отклик /-ой переменной нау-ое структурное возмущение в долгосрочной динамике равняется нулю.
Важно отметить, что выражение для долгосрочного динамического отклика (16) включает обращение матрицы А. В настоящее время программа ЕУ^б требует, чтобы все ограничения были линейными по элементам матриц А и В. Поэтому, если вы специфицируете долгосрочное динамическое идентифицирующее ограничение, то матрица А должна быть единичной.
Чтобы специфицировать долгосрочные динамические ограничения с помощью матрицы отображения, создайте матрицу с присвоенным ей именем, содержащую отображение для матрицы долгосрочного динамического отклика С. Неограниченным элементам в матрице С следует присвоить пропущенное значение «МЛ». Предположим, что вы имеете к — 2эндоген-ных переменных в УДВ-модели, в которой хотите ограничить долгосрочный динамический отклик второй эндогенной переменной первым структурным воздействием, равным нулю (С21 — 0). Тогда матрица долгосрочного динамического отклика будет иметь следующее отображение:
Создав матрицу отображения, из меню окна VAR-объекта выберите опцию Proc/Estimate Structural Factorization…. В диалоге SVAR Options щелкните кнопки Matrix и Long-Run Pattern, и в соответствующем окне редактирования напечатайте имя матрицы отображения.
Спецификация долгосрочных динамических идентифицируемых ограничений
С = A-]B,
(16)
(17)
Мы можем создать эту матрицу с помощью следующих команд:
Matrix (2,2) patc = na
Patc (2,1) = 0
№32006
Чтобы специфицировать то же самое долгосрочное динамическое идентифицирующее ограничение в виде текста, из окна VAR-объекта выберите опцию Proc/Estimate Structural Factorization… и щелкните кнопку Text. В окне редактирования следует напечатать следующее:
@LR2(@u1)=0 ‘zero LR response of 2-nd variable to 1-st shock
где после апострофа в строке идет комментарий. Это ограничение начинается со специального ключевого слова « @LR#» с символом «#», представляющим переменную отклика для ограничения. В круглых скобках следует специфицировать ключевое слово «@U» импульса и число возмущений с последующим знаком равенства и значением отклика (как правило, 0). Помните, что, несмотря на то, что вы можете привести список множественных долгосрочных динамических ограничений, вы не можете смешивать краткосрочные динамические и долгосрочные динамические идентифицирующие ограничения.
Отметим, что долгосрочные динамические идентифицирующие ограничения можно специфицировать в виде краткосрочных динамических ограничений (с помощью применения представления MA бесконечного порядка). Несмотря на то, что оцененные матрицы A и B должны быть одинаковыми, стандартные ошибки отклика на импульсы из краткосрочного динамического представления будут некорректными (поскольку неопределенность в оцененных коэффициентах MA бесконечного порядка не принимается в расчет).
Некоторые важные замечания
На данный момент спецификация идентифицирующих ограничений должна подчиняться следующим ограничивающим правилам:
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
• Матрицы A и Bдолжны быть квадратными и невырожденными. Втекстовом видедолжно быть точно столько же уравнений, сколько эндогенных переменных в VAR-модели. Для крат-косрочныхдинамических ограничений в виде отображений следует задать матрицы отображения для обеих матриц A и B.
• Ограничения должны быть линейными по элементам матриц A и B. Кроме того, идентифицирующие ограничения на матрицы A и B должны быть независимыми (не иметь совместных ограничений для элементов матриц A и B).
• Нельзя накладывать краткосрочные динамические и долгосрочные динамические идентифицирующие ограничения.
• В настоящее время структурные разложения для VEC-моделей не доступны.
• Идентифицирующее ограничение предполагает, что структурные возмущения ut имеют единичные дисперсии. Поэтому, почти всегда, будет стремление оценивать диагональные элементы матрицы B так, чтобы получить оценки среднеквадратичных отклонений структурных возмущений.
• Обычно (в соответствующей литературе) предполагается, что структурные возмущения имеют диагональную, а не единичную ковариационную матрицу. Чтобы сравнить ваши результаты с результатами этих исследований, следует разделить элементы каждого столбца матрицы B на соответствующий диагональный элемент этого столбца (так, чтобы получающаяся в результате матрица имела единицы на главной диагонали). Чтобы проиллюстрировать такое преобразование, рассмотрим простую модель к = 2 с переменными A = 1:
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
№32006
e u = b „ u u + b Uu 2t,
e 2t = b 2, u 1t + b 22U 2t ,
(18)
где u1,t и u2,t — независимые структурные возмущения с единичными дисперсиями, как предполагается в спецификации программы EViews.
Чтобы переписать эту спецификацию с матрицей B, содержащей единицы на главной диагонали, определите новое множество структурных возмущений с помощью преобразований v 1t = biiUi,t и v2,t = b22U2,t.
Тогда структурное соотношение можно переписать:
e it = v lf + (b 12/ b 22 )v 2t,
e 2t = (b 21 /b 11 )v 1t + v 2t ,
теперь:
B =
b 211 b 1
b 12/ b 2 1
, vf =
«v 1,t » f «0» «b 2 b 11 0»
_v 2,t _ V 0 ‘ 0 b 2 b 22 У
(19)
(20)
Отметим, что преобразование включаетлишь изменение масштаба элементов матрицы В, но не матрицы Л. В случае, если матрица В является диагональной матрицей, элементы на главной диагонали этой матрицы — просто оцененные среднеквадратичные отклонения структурных возмущений.
Условия идентифицируемости
Как было указано выше, предположение ортонормированных структурных возмущений налагает к (к +1)/2 ограничений на 2к2 неизвестных элементов в матрицах Л и В, где к — число эндогенных переменных вУДВ-модели. Чтобы идентифицировать матрицы Л и В, следует предоставить, по крайней мере, к (к +1)/2 — 2к2 = к (3к -1)/2 дополнительных идентифицирующих ограничений. Это необходимое условие порядка для идентифицируемости, и оно проверяется подсчетом числа предоставляемых ограничений.
Так, достаточное условие для локальной идентифицируемости можно проверить обратимостью «пополненной» информационной матрицы [ДтнБапо, С1апп1п1 (1997)]. Это условие локальной идентифицируемости вычисляется в точке начальных значений. Если программа ЕУ^б сообщит об ошибке вырожденности для различных начальных значений, убедитесь, что ваши ограничения идентифицируют матрицы Л и В.
Мы также требуем, чтобы матрицы Л и В были квадратными и невырожденными. Условие невырожденности проверяется численно в точке начальных значений. Если матрицы Л и В в точке начальных значений вырожденны, то в сообщении об ошибке вам будет предложено предоставить другую точку начальных значений.
Неопределенность в знаке
Для некоторых ограничений знаки матриц Л и В не идентифицированы [СЬпбШпо, е! а1. (1999)]. Если знак не определен, мы выбираем такую нормировку, при которой все диагональные элементы матрицы факторизации были бы положительными. Эта нормировка гарантирует, что все структурные импульсы имеют положительные знаки (как это делается при
№32006
факторизации Чолески). «По умолчанию»эти правила нормировки используются всякий раз, когда они применимы. Если вы не хотите изменять знаки, то на странице диалога SVAR Options не выбирайте опцию Normalize Sign.
Оценивание матриц Au B
Как только предоставите идентифицирующие ограничения в любой из описанных выше форм, вы в состоянии оценить матрицы Л и B. Просто в диалоге SVAR Options щелкните кнопку OK. Вам следует оценить эти матрицы, чтобы использовать структурную опцию Impulse Responses и Variance Decompositions.
Матрицы Л и B оцениваются методом максимального правдоподобия, поскольку следует иметь в виду, что возмущения имеют многомерное нормальное распределение. Мы вычисляем правдоподобие втерминах неограниченных параметров с подстановкой ограничений. Логарифмическое правдоподобие максимизируется посредством «metod of scoring» (с диагональной коррекцией типа Маркварта), в котором градиент и математическое ожидание информационной матрицы вычисляется аналитически [Amisano, Giannini (1997)].
Управление оптимизацией
Для управления процессом оптимизации в диалоге SVAR Options на странице Optimization Control предоставляются соответствующие опции. Эти опции предназначаются для того, чтобы специфицировать начальные значения, максимальное число итераций и критерий сходимости.
Начальные значения — это значения для неограниченных параметров после подстановки ограничений. С помощью опции Fixed все свободные параметры устанавливаются относительно значения, специфицированного в окне редактирования. При применении опции User Specified в качестве начальных значений, в векторе коэффициентов используются значения, которые отображаются в виде текста. Для ограничений, специфицированных в виде отображений, начальные значения, специфицированные пользователем, берутся из первых m элементов вектора коэффициентов C«по умолчанию», где m — число свободных параметров. С помощью опций Drawfrom… начальные значения для свободных параметров извлекаются из специфицированных распределений случайным образом.
Вывод результатов оценивания
Как только достигается сходимость, программа EViews отображает вывод результатов оценивания в окне VAR. Приводятся точечные оценки, стандартные ошибки и z-статистики оцененных свободных параметров вместе с максимальным значением логарифмической функции правдоподобия. Оцененные стандартные ошибки основаны на обращении оцененной информационной матрицы (отрицательное математическое ожидание Гессиана), вычисленном в точке сходимости оценок.
Для сверхидентифицируемых моделей также приводятся результаты LR-тестирования (по тесту отношения правдоподобия) для сверхидентифицируемости. Статистика LR-теста вычисляется по формуле:
LR = 2(lu -1r ) = T(tr(P) — log|P| — k), (21)
где P = Л’ B -TB “ME.
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
№32006
При нулевой гипотезе, что ограничения справедливы, LR-статистика асимптотически распределена, как %2(q-k), где q — число идентифицирующих ограничений.
Если переключить представление окна VAR с помощью выбора из этого окна опции View/SVAR Output, вы сможете возвратиться к предыдущим результатам (без повторного оценивания). Кроме того, некоторые из результатов SVAR-оценивания можно восстановить как члены данных VAR-модели.
Тест на наличие коинтеграции
Открытие того, что многие макровременные ряды могут содержать единичный корень, стимулировало разработку теории анализа нестационарных временных рядов. Так, Энгель и Грэнжер [Engle, Granger (1987)] показали, что линейная комбинация двух или более нестационарных рядов может быть стационарной. Если такая стационарная линейная комбинация существует, то нестационарные временные ряды называются коинтегрированными. Стационарную линейную комбинацию называют коинтегрирующим уравнением и ее можно интерпретировать как соотношение долгосрочного динамического равновесия между переменными.
Цельтеста на наличие коинтеграции состоит втом, чтобы определить, коинтегрированна или нет группа нестационарных рядов. Как объясняется ниже, присутствие коинтегрирую-щего соотношения формирует основу для VEC-спецификации. Программа EViews выполняет тестирование наличия коинтеграции на основе VAR-модели, используя методологию, разработанную в работах Йохансена [Johansen (1991), (1995)].
Рассмотрим VAR порядка р:
y t = Д yt-1 +… + Apy t — р + Bxt +Et, (22)
гдеyt — k-вектор нестационарных /(1) переменных,
xt — d-вектор детерминированных переменных,
а st — вектор возмущений.
Мы можем переписать эту VAR-модель в виде:
р -1
Ayt =nyt -1 i Ayt — i + Bxt +st, (23)
i =1
где:
рр n=£A, -1, Г, = -£Aj. (24)
i=1 j = i+1
Теорема представления Грэнжера утверждает, что если матрица коэффициентов П име-етуменьшенный рангr < k, то существуютk хr матрицы а и р, имеющие ранг rтак, что П= аР’, а Р’yt — I(0). Число r представляет собой число коинтегрирующих соотношений (коинтег-рирующийранг), а каждый столбец матрицы р — коинтегрирующий вектор. Как объясняется ниже, элементы матрицы а являются параметрами коррекции вVEC-модели. Метод Йохансена применяется для оценивания матрицы П из неограниченной VAR-модели, а также для тестирования того, можно ли отклонить ограничения, подразумеваемые уменьшенным рангом матрицы П.
прикладная эконометрика_______________________________
№32006
Как выполнить тест на наличие коинтеграции
Чтобы выполнить тест на наличие коинтеграции Йохансена, из панели инструментов окна группы или окна VAR выберите опцию View/Cointegration Test…. На странице Cointegration Test Specification будет подсказка: ввести информацию о тесте (рис. 5).
Рис. 5. Диалоговое окно для задания теста на наличие коинтеграции
Поскольку это тест на наличие коинтеграции, он допустим, если только вы работаете с рядами, о которых известно, что они нестационарные. Поэтому сначала вы можете применить тесты единичного корня к каждому ряду в УДВ-модели.
Спецификация детерминированных трендов
Ваш ряд может иметь ненулевые средние значения и детерминированные тренды, а также стохастические тренды. Аналогично коинтегрирующие уравнения могут иметь свободные члены и детерминированные тренды. Асимптотическое распределение _В-статистики (статистики отношения правдоподобия) для коинтеграции не подчиняется обычному X2-распределению, а зависит от предположений, сделанных относительно детерминированных трендов. Поэтому, чтобы выполнить тест, следует сделать предположение относительно тренда, лежащего в основе ваших данных.
Для каждой строки диалога в столбце СО!МТЕО перечисляются детерминированные переменные, которые появляются внутри коинтегрирующих соотношений (члена коррекции регрессионных остатков), в то время как в столбце OUTSIDE перечисляются детерминированные переменные, которые появляются в УЕС-уравнении вне коинтегрирующих соотношений. Случаи 2 и 4 не имеют одного и того же множества (раздел Техническое обсуждение) детерминированных членов в двух столбцах. Для этих двух случаев некоторые детерминиро-
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
№32006
ванные члены ограничены принадлежностью только к коинтегрирующему соотношению. Для случаев 3 и 5 детерминированные члены являются общими в двух столбцах и декомпозиция детерминированных эффектов внутри и вне коинтегрирующего пространства однозначно не идентифицирована.
Практически, случаи 1 и 5 используются редко. Применять случай 1 следует, если вы знаете, что все ряды имеют нулевое среднее значение. Случай 5 может предоставить хорошую (внутри выборочной) подгонку, но будет приводить к неправдоподобным вневыбороч-ным прогнозам. В качестве ориентировочного руководства применяйте случай 2, если полагаете, что ни один из рядов не имееттренда. Для трендовых рядов применяется случай 3, когда все тренды являются стохастическими. Если вы полагаете, что некоторые из рядов тренд-стационарны, то воспользуйтесь случаем 4.
Если вы не уверены, какое предположение относительно тренда следует применить, то можете выбрать опцию Summary of all 5 trend assumptions (случай 6), которая поможет вам определить выбор предположения о тренде. Эта опция покажет число коинтегрирующих соотношений для каждого из 5 предположений о тренде, и вы сможете оценить чувствительность результатов к предположению о тренде.
Техническое обсуждение
В программе EViews представлены следующие пять случаевдетерминированноготренда, рассмотренных Йохансеном [Johansen (1995)]:
1. Уровневые данные yt не имеют никаких детерминированных трендов, и в коинтегрирующих уравнениях отсутствуют свободные члены:
2. Уровневые данныеу{ не имеют никакихдетерминированных трендов, и коинтегрирую-щие уравнения содержат свободные члены:
3. Уровневые данные у{ имеют линейные тренды, но коинтегрирующие уравнения имеюттоль-ко свободные члены:
4. Уровневые данные у{ и коинтегрирующие уравнения имеют линейные тренды:
Н*(г): Пуг_ + Бх{ =а(Р’уг_, +ро + р,0 + а±у<,.
5. Уровневые данные у{ имеют квадратные тренды, а коинтегрирующие уравнения — линейные тренды:
Члены, связанные са±, являются детерминированными членами «вне» коинтегрирующих соотношений. Когда детерминированный член появляется внутри и вне коинтегрирующего соотношения, декомпозиция однозначно не идентифицируется. Йохансен [Johansen (1995)] идентифицировал часть, принадлежащую внутренности коррекции регрессионных остат-
H2(r): Пyt_i + Bxt =aP’yt_i.
H*(r): nyt_i + Bxt =a(P’yt_i +po).
Hi(r): nyt_i + Bxt =a(P’yt_i +po) + a±yo.
H(r): nyt_i + Bxt =a(P’yt_i +po +pit) +a±(yo +yit).
№32006
ков, ортогонально проектируя экзогенные члены на пространство a так, что a± является нулевым пространством a (a’a± = o). В программе EViews применяется разностный метод идентифицируемости, при котором член коррекции регрессионных остатков имеет нулевое выборочное среднее значение. Более определенно мы идентифицируем часть внутри члена коррекции регрессионных остатков с помощью регрессии коинтегрирующих соотношений P’yt по константе (и линейному тренду).
Экзогенные переменные
Тестовый диалог позволяет специфицировать дополнительные экзогенные переменные xt, чтобы включить в тестирование VAR-модели. Константа и линейный тренд не должны вносится в список в окне редактирования, поскольку они специфицируются при использовании пяти опций Trend Specification. Если вы хотите включить экзогенные переменные, то знайте, что критические значения, сообщаемые программой EViews, не вычисляются для этих переменных.
Обычно наиболее часто добавляемыми детерминированными членами являются сезонные фиктивные переменные. Однако отметим, что, если при тестировании VAR-модели вы включаете стандартную o-i сезонную фиктивную переменную, то она будет влиять как на среднее значение, так и на тренд уровневого ряда. Для обработки этой проблемы Йохансен [Johansen (i995)] предложил применение центрированных (ортогональных) сезонных фиктивных переменных, которые сдвигают среднее значение, не внося свой вклад в тренд. Центрированные сезонные фиктивные переменные для ежеквартального и ежемесячного ряда можно сгенерировать с помощью команд:
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
series d_q = @seas(q) -1/4 series d_m = @seas(m) -1/12
для квартала q и месяца m соответственно.
Интервалы лагирования
Вам следует специфицировать лаги тестируемой VAR-модели в виде интервальных пар. Отметим, что лаги специфицируются как лаги членов первых разностей, используемых во вспомогательной регрессии, а не втерминахуровней. Например, если в поле редактирования вы печатаете «1 2», то тестируемая VAR-модель регрессирует Ayt по Ayt_,, Ayt_2 и по любым другим экзогенным переменным, которые вы специфицировали. Отметим, что втер-минах уровневого ряда yt наибольший лаг равен 3. Чтобы провести тестирование на наличие коинтеграции с одним лагом в уровневом ряду, в поле редактирования напечатайте «0 0».
Интерпретация результатов теста на наличие коинтеграции
В качестве примера (рис. 6) показана первая часть вывода результатов тестирования на наличие коинтеграции для системы с четырьмя переменными [Johansen, Juselius (i99o)] для данных по Дании.
Как показано в заголовке вывода, тестирование не предполагает никакого тренда в ряду с ограниченным свободным членом в коинтегрирующем соотношении (вторая спецификация тренда в диалоге), включает три ортогональных сезонных фиктивных переменных Di-D3
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
Ns32006
Date: 01/16/04 Time: 11:40 Sample (adjusted): 1974:3 1987:3 Included observations: S3 after adjusting endpoints
Trend assumption: No deterministic trend (restricted constant)
Series: LRM LRY IBO IDE
Lags interval (in first differences): 1 to 1
Unrestricted Cointegration Rank Test (Trace)
Hypothesized No of CE(s) Eigenvalue Trace Statistic 0.05 Critical Value Prob»
None 0.469677 52.71087 54.0790 0.0659
At most 1 0.174241 19.09464 35.1323 0.7814
At most 2 0 118083 8.947661 20.2613 0.7411
At most 3 0.042249 2.287349 9.1645 0.7200
* denotes rejection of the hypothesis at the 0 05 level Trace test indicates no cointegration at the 0.05 level ’■’MacKinnon-Haug-Michelis (1999) p-values
Рис. 6. Результаты теста на наличие коинтеграции
и использует один лаг в разностях (два лага в уровнях), который в поле редактирования специфицирован как «1 1».
Число коинтегрирующих соотношений
Первая часть таблицы сообщает о результатах тестирования числа коинтегрирующих соотношений. Приводится два типа критических статистик. Первый блок дает сведения о так называемых статистиках следа (trace statistics), а второй блок (не показанный выше) — о статистике максимального собственного значения (maximum eigenvalue statistics). Для каждого блока, первый столбец — числа коинтегрирующих соотношений при нулевой гипотезе, второй столбец — упорядоченные собственные значения матрицы П (24), третий столбец — критические статистики, а последние два столбца — 5%-ые и Ш-ые критические значения. Эти критические значения [Osterwald-Lenum (i992)] не намного отличаются от значений в работе Йохансена и Джуселиус [Johansen, Juselius (i99o)].
Чтобы определить число коинтегрирующих соотношений r, зависящее от предположений, сделанных о тренде, мы можем продолжать тестирование последовательно отr = 0до r = k _ i до тех пор, пока не сможем отклонить гипотезу. О результате этой последовательной процедуры сообщается внизу каждого блока таблицы.
Статистика следа, отраженная в первом блоке, проверяет нулевую гипотезу о r коинтегрирующих соотношениях против альтернативной гипотезы относительно k коинтегрирующих соотношений, где k — число эндогенных переменных при r = o,i,…,k _ i. Альтернативная гипотеза для k коинтегрирующих соотношений соответствует случаю, когда ни один из рядов не имеет единичного корня, и стационарную VAR-модель можно специфицировать в терминах уровней всех рядов. Статистика следа для нулевой гипотезы о r коинтегрирующих соотношениях вычисляется как:
№32006
k
LRtr (r| k) = -T^log(1-X,• ),
(25)
i =r +1
где X,• — /-ое наибольшее собственное значение матрицы П (24), которое сообщается во втором столбце таблицы вывода результатов.
Во втором блоке вывода результатов сообщается о статистике максимального собственного значения, которая тестирует нулевую гипотезу о г коинтегрирующих соотношениях против альтернативной гипотезы о г +1 коинтегрирующих соотношений. Эта критическая статистика вычисляется как:
для r = o,i,…,k -1.
Существует несколько других деталей, которые следует иметь в виду:
• Критические значения доступны вплоть до k = io рядов.Также отметим, что критические значения зависят от предположений о тренде и, возможно, не годятся для моделей, которые содержат другие детерминированные регрессоры. Например, фиктивная переменная сдвига в тестируемой VAR-модели подразумевает сдвиговый линейный тренд в уровневом ряду yt.
• Статистики следа и максимального собственного значения могут привести к противоречивым результатам. Для таких случаев мы рекомендуем исследовать оцененный коинтег-рирующий вектор и в своем выборе опираться на интерпретируемость коинтегрирующих соотношений [Johansen, Juselius (199o)].
• В отдельных случаях индивидуальные тесты на наличие единичного корня показывают, что некоторые из рядов являются интегрируемыми, однако тест на наличие коинтеграции выявляет, что матрица П имеет полный ранг (r = k). Это очевидное противоречие может возникнуть в результате малой мощности тестов на наличие коинтеграции и, возможно, из-за малого объема выборки или из-за ошибок спецификации.
Вторая часть вывода результатов содержит оценки коинтегрирующих соотношений р и параметров коррекции а. Как известно, коинтегрирующий вектор р не идентифицируем, если только мы не налагаем некоторую произвольную нормировку. Первый блок дает оценку матрицам р и а, основанную на нормировке Р’, Snp = I, где матрица Sn определена в работе [Johansen (1995)].
Отметим, что транспонированная р сообщается при Unrestricted Cointegrating Coefficients так, что первая строка является первым коинтегрирующим вектором, вторая строка — вторым коинтегрирующим вектором и так далее.
В остальных блоках сообщается об оценках с другой нормировкой для каждого возможного числа коинтегрирующих соотношений r = 0,1,…,k -1. Эта альтернативная нормировка выражает первые r переменные как функции от остальных k — r переменных в системе. В круглых скобках сообщается об асимптотических стандартных ошибках параметров, которые являются идентифицируемыми.
LRmax(r| r +1) = -Tlog(1-Xr+1)
= LRtr ( r| k) — LRtr ( r +11 k)
(26)
Коинтегрирующие соотношения
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
№32006
Наложение ограничений
Так как коинтегрирующий вектор р не идентифицируем, вы возможно захотите наложить собственные идентифицирующие ограничения. Ограничения можно наложить на коинтегрирующий вектор (элементы матрицы р) и/или на коэффициенты коррекции (элементы матрицы а). Чтобы наложить ограничения в тесте на наличие коинтеграции, выберите опцию View/ Cointegration Test… и специфицируйте опции на странице Cointegration Test Specification, как объяснялось выше. Затем выберите страницу VEC Restrictions (рис. 7). Введете ваши ограничения в окно редактирования, появляющееся с выбором окна Impose Restrictions.
Рис. 7. Диалоговое окно для наложения ограничений на элементы матрицы а(Р)
Ограничения на коинтегрирующий вектор
Чтобы наложить ограничения на коинтегрирующий вектор р, следует обратиться к(/,у)-му элементу транспонированной матрицы р, обозначенному как В(/, ]). /-ое коинтегрирующее соотношение имеет представление:
В (1,1)*у1 + В (1,2)*у2 + … + В (I, к)*ук
где у1, у2… — (лагированные) эндогенные переменные.
Если вы хотите наложить ограничение — коэффициент во втором коинтегрирующем уравнении при у1 равен единице, тогда в окне редактирования следует напечатать следующее:
Б(2,1) = 1
Вы можете наложить множественные ограничения, отделяя в одной строке каждое ограничение запятой или печатая каждое ограничение в отдельной строке. Например, при наложении ограничения: в первом и втором коинтегрирующем уравнении коэффициенты при у1 равны единице, следует напечатать:
№32006
Б (1,1) = 1
Б(2,1) = 1
На данный момент все ограничения на элементы матрицы Р должны быть линейными (то есть аффинными). Например, применение ограничения:
Б (1,1) * Б (2,1) = 1
вернет сообщение о синтаксической ошибке.
Ограничения на коэффициенты коррекции
Чтобы наложить ограничения на коэффициенты коррекции, вам следует обратиться к(/,у)-му элементу матрицы а, обозначенному как А(/, ]). Члены коррекции регрессионных остатков в /-ом уравнении УБС-модели будут иметь представление:
А (¡,1)*Сот1Ея1 + А (¡,2)*Сот1Ея2 + … + А (¡,г)*Сот1Еяг.
На данный момент ограничения на коэффициенты коррекции определяются гомогенными линейными ограничениями, так что ваше ограничение можно написать как Н уес(а) = 0, где Н — известная qk хг матрица. Это условие подразумевает, что ограничение:
А(1,1)= А(2,1)
является допустимым, но выражение:
А (1,1) = 1
вернет сообщение о синтаксической ошибке ограничения.
Одно особенно интересное ограничение состоит в том, может ли вся /-ая строка матрицы а быть нулевой строкой. Если это так, тогда /-ая эндогенная переменная называется слабоэкзогенной относительно параметров матрицы р. Например, если мы предполагаем, что существует лишь одно коинтегрирующее соотношение в УБС-модели, то для тестирования: является ли вторая эндогенная переменная слабо экзогенной относительно параметров матрицы р — вы можете ввести ограничение:
А (2,1) = 0
Чтобы наложить множественные ограничения, можно либо напечатать ограничения в одной строке, отделяя каждое ограничение запятой, либо разместить каждое ограничение на отдельной строке. Например, чтобы протестировать, является ли слабо экзогенной относительно параметров матрицы р вторая эндогенная переменная в УБС-модели сдвумя коинтег-рирующими соотношениями, вы можете напечатать:
А (2,1) = 0
А (2,2) = 0
Также можно наложить ограничения на обе матрицы, Р и а. Однако ограничения на матрицы р и а должны быть независимыми. Например, ограничения:
А (1,1) = 0
Б (1,1) = 1
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
Ns32006
являются допустимыми, но выражение:
А (1,1) = Б (1,1)
возвратит сообщение о синтаксической ошибке ограничения.
Идентифицирующие ограничения и связывающие ограничения
В программе проверяется, приводят ли к идентифицируемости ограничения, ко-
торые вы предоставили, всех коинтегрирующих векторовдля каждого возможного ранга.Условие идентифируемости проверяется численно с помощью вычисления ранга соответствующей матрицы Якоби [Boswijk (1995)]. Асимптотические стандартные ошибки для оцененных коинтегрирующих параметров будут сообщаться, если только ограничения приводят к идентифицируемости коинтегрирующих векторов.
В случае связывающих ограничений программа EViews приведет 1_Р-статистику (статистику отношения правдоподобия) для тестирования. _В-статистика сообщается, если степени свободы асимптотического %2 распределения положительны. Отметим, что ограничения могут быть связанными, даже если они не приводят к идентифицируемости (например, когда вы налагаете ограничения на коэффициенты коррекции, но не на коинтегрирующий вектор).
Оценивание ограниченных коинтегрирующих векторов р и коэффициентов коррекции а, в общем, включает итерационный процесс. Страница VEC Restrictions диалога Johansen Cointegration Test предоставляет управление итерациями — опции для максимального числа итераций и для критерия сходимости. Программа EViews оценивает ограниченные матрицы р и а, применяя алгоритм переключения [Boswijk (1995)]. Каждый шаг алгоритма гарантирует увеличение правдоподобия, и алгоритм, в конечном счете, должен сходиться (хотя сходимость может быть — к локальному, а не глобальному оптимуму). Возможно, придется увеличить число итераций, если возникнут трудности в достижении сходимости при установках значений «по умолчанию».
Если наложить ограничения в представлении Cointegration Test, то вывод сначала отобразит тестовые результаты без ограничений, как описано выше. Вторая часть вывода результатов начинается с отображения результатов LR-теста (теста отношения правдоподобия) для связывающих ограничений.
Если ограничения не будут связывающими для специфического ранга, соответствующие строки будут заполнены значениями NA. Если ограничения будут связывающими, но алгоритм не сходится, то соответствующая строка будет заполнена звездочками (*). В этом случае следует провести тестирование заново, увеличив число итераций или ослабив критерий сходимости. На примере вывода (рис. мы видим, что единственное ограничение а31 = 0 является связывающим только при предположении, что существует одно коинтег-рирующее соотношение. Зависящий от существования только одного коинтегрирующего соотношения, LR-тест не отклоняет наложенное ограничение при обычных уровнях значимости.
Опции для оценивания при наличии ограничений
Результаты тестирования на наличие коинтеграции при ограничениях
№32006
Restrictions:
а(3,1)=0
Tests of cointegration restrictions:
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Hypothesized Restricted LR Degrees of
No. ofCE(s) Log-likehood Statistic Freedom Probability
1 668.6698 0.891088 1 0.345183
2 674.2964 NA NA NA
3 677.4677 NA NA NA
NA indicates restriction not binding.
Рис. 8. Результаты теста на коинтеграцию при наличии ограничений
Вывод результатов также сообщает об оцененных матрицах р и а с наложенными ограничениями. Поскольку тест на наличие коинтеграции не специфицирует число коинтегрирую-щих соотношений, то будут отображены результаты для всех рангов, которые являются совместимыми со специфицированными ограничениями. Например, предположим, что имеется ограничение:
B(2,1) = 1
Так как это ограничение — на второй коинтегрирующий вектор, то программа EViews отобразит результаты для рангов r — 2,3,…,к -1 (если VAR-модель имеет только к — 2 эндогенных переменных, то программа EViews вернет сообщение об ошибке, указывающее, что «implied rankfrom restrictions must be of reduced order» («предполагаемый из ограничений ранг должен иметь меньший порядок»)).
Для каждого ранга сообщается, была ли достигнута сходимость, и приводится число примененных в результате итераций. В выводе также сообщается, идентифицируютли ограничения все коинтегрирующие параметры при предполагаемом ранге. Если коинтегрирующие векторы являются идентифицируемыми, то об асимптотических стандартных ошибках будет сообщено вместе с предоставлением оценок параметров для матрицы р.
Векторные модели коррекции регрессионных остатков (VEC-модели)
Векторная модель коррекции регрессионных остатков (VEC-модель) является ограниченной VAR-моделью, разработанной для применения к нестационарным рядам, для которых известно, что они являются коинтегрированными. VEC-модель имеет соотношения коинтеграции, встроенные в спецификацию таким образом, чтобы при долгосрочном динамическом поведении эндогенные переменные, сходились к их коинтегрирующим соотношениям с учетом краткосрочной динамической коррекции. Член коинтеграции носит название члена коррекции регрессионных остатков, поскольку отклонение от долгосрочного динамического равновесия корректируется постепенно через ряд частных краткосрочных динамических корректировок.
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
N932006
Приведем самый простой пример. Рассмотрим систему двух переменных с одним коин-тегрирующим уравнением и без лагированных разностных членов. Коинтегрирующее уравнение имеет вид:
у 2,t = Ру „. (27)
Соответствующая VEC-модель есть:
Ау i,f = а i( у 2,f _Ру i,t _,) + sv,
Ay 2,f = а 2 ( y 2,t -1 _Ру i,t _i) +s 2,t. (28)
В этой простой модели единственная переменная в правой части является членом коррекции регрессионных остатков. В долгосрочном динамическом равновесии этот член равен нулю. Однако, если у1 и у2 отклоняются от долгосрочного динамического равновесия, то член коррекции регрессионных остатков будет ненулевым, а каждая переменная корректируется, чтобы частично восстановить отношение равновесия. Коэффициент а i измеряет скорость коррекции к равновесию i-ой эндогенной переменной.
Как оценить модель коррекции регрессионных остатков
Поскольку спецификация VEC-модели применяется только к коинтегрированным рядам,
сначала следует провести тестирование Йохансена на наличие коинтеграции, как описано
выше, и определить число коинтегрирующих соотношений. Предоставить эту информацию следует как часть спецификации VEC-модели.
Чтобы задать установку VEC-модель, на панели инструментов VAR-модели щелкните кнопку Estimate и на странице VAR/VEC Specification выберите спецификацию Vector Error Correction. На странице VAR/VEC Specification следует разместить информацию — подобно тому как это делалось для неограниченной модели VAR, за исключением следующего:
• Константа или член линейного тренда не должны задаваться в окне редактирования Exogenous Series. Их следует расположить на странице Cointegration.
• Спецификация интервала лагирования относится к лагам первых разностных членов в VEC-модели. Например, спецификация лагов «1 1» будет включать в правые части уравнений VEC-модели лагированные первые разностные члены. Переписанная вуровневыхзначе-ниях, эта VEC-модель является ограниченной VAR-моделью с двумя лагами. Чтобы оценить VEC-модель без лагированных первых разностных членов, специфицируйте лаги как «0 0».
• Константа и спецификация тренда для VEC-моделей должны быть специфицированы на ярлыке Cointegration. Вам следует выбрать одну из пяти спецификаций тренда, какэто полагалось в разделе «Спецификация детерминированных трендов». Кроме того, в соответствующем поле редактирования нужно специфицировать число коинтегрирующих соотношений. Это число должно быть положительным целым числом, меньше числа эндогенных переменных в VEC-модели.
• Если вы хотите наложить ограничения на коинтегрирующие соотношения и/или коэффициенты коррекции, используйте страницу Restrictions. Более подробно эти ограничения описаны в разделе «Ограничения на коинтегрирующий вектор». Отметим, что эта страница будет недоступной, если вы не щелкнули спецификацию Vector Error Correction на странице VAR/VEC Specification.
№32006
Как только заполнен диалог, чтобы оценить VEC-модель, просто щелкните OK. Оценивание VEC-модели выполняется за два шага. На первом шаге оцениваются коинтегрирующие соотношения с помощью процедуры Йохансена, которая применяется при тестировании на наличие коинтеграции. Затем из оцененных коинтегрирующих соотношений строятся члены коррекции регрессионных остатков и оценивается VAR-модель в первых разностях, включая члены коррекции регрессионных остатков в качестве регрессоров.
Вывод результатов оценивания модели коррекции регрессионных остатков
(VEC-модели)
Вывод результатов оценивания VEC-модели состоит из двух частей. В первой части вывода сообщается о результатах процедуры Йохансена на первом шаге. Если вы не налагали никаких ограничений, то программа EViews будет использовать нормировку «по умолчанию», которая идентифицирует все коинтегрирующие соотношения. Эта нормировка «по умолчанию» выражает первые r переменных в VEC-модели как функции от остальныхk -r переменных, где r — число коинтегрирующих соотношений, а k — число эндогенных переменных. Для параметров, которые идентифицируемы согласно ограничениям, сообщаются асимптотические стандартные ошибки (скорректированные на степени свободы). Если вы предоставляли ваши собственные ограничения, и если ваши ограничения не идентифицируют все коинтегрирующие векторы, то стандартные ошибки сообщаться не будут.
Во второй части вывода сообщается о результатах на втором шаге для VAR-модели в первых разностях, включая члены коррекции регрессионных остатков, оцененных на первом шаге. При выводе результатов члены коррекции регрессионных остатков обозначаются CointEql, CointEq2 и так далее. Эта часть вывода результатов имеет тот же самый формат, что и для неограниченных VAR-моделей, как объяснялось в разделе «Вывод результатов оценивания для VAR-модели», но с одним отличием. Внизу таблицы вывода результатов для VEC-модели вы увидите, что для системы сообщено два значения логарифмического правдоподобия. Первое значение, помеченное Log Likelihood (d.f. adjusted), вычисляется с помощью определителя остаточной ковариационной матрицы (сообщенного как Determinant Residual Covariance), используя коррекцию степеней свободы для малой выборки как в (3). Оно равно значению логарифмического правдоподобия, определенному для неограниченных VAR-моделей. Значение Log Likelihood вычисляется с использованием остаточной ковариационной матрицы без коррекции степеней свободы. Это значение логарифмического правдоподобия сравнивается со значением логарифмического правдоподобия, выведенным в результатах тестирования на наличие коинтеграции.
Представления и процессы для модели коррекции регрессионных остатков
(VEC-модели)
В основном для VEC-моделей доступны те же самые представления и процессы, которые доступны для VAR-моделей, которые объяснялись выше. Здесь мы упомянем только те, которые являются специфическими для VEC-моделей.
Коинтегрирующие соотношения
При выборе опции View/Cointegration Graph отображается график оцененных коинтегрирующих соотношений, которые применяются для VEC-модели. Чтобы сохранить эти оце-
EViews
Векторные модели авторегрессии и коррекции регрессионных остатков
№32006
ненные коинтегрирующие соотношения в рабочем файле как ряды с именами, примените опцию Proc/Make Cointegration Group. Этот процесс создаст и отобразит объект группы без имени, содержащий оцененные коинтегрирующие соотношения, как ряды с именами. Эти ряды называются COINTEQOI, COINTEQ02 и так далее.
Прогнозирование
Прогнозы можно получить с помощью решения модели, созданной на базе оцененной VAR/VEC-модели. На панели инструментов VAR-окна щелкните опцию Proc/Make Model, чтобы создать объект модели из оцененной VAR/VEC-модели. Затем в модельной спецификации вы можете сделать любые изменения, включая модификацию утверждения ASSIGN перед решением модели для получения прогнозов.
Члены данных
Различные результаты из оцененной VAR/VEC-модели можно восстановить через члены данных командной линии. Здесь мы сосредоточимся на восстановлении оцененных коэффициентов VAR/VEC-модели.
Получение коэффициентов VAR-модели
К коэффициентам неограниченных VAR-моделей можно получить доступ, обращаясь к элементам двумерного массива C. Первая размерность массива C относится к числу уравнений VAR-модели, вто время как вторая размерность массива C относится к числу переменных в каждом уравнении. Например, C(2,3) — коэффициенттретьего регрессора во втором уравнении VAR-модели. Тогда к коэффициенту C(2,3) VAR-модели по имени VAR01 можно получить доступ с помощью команды:
varOl.c (2,3)
Чтобы исследовать соответствие между каждым элементом C и оцененными коэффициентами, на панели инструментов VAR выберите опцию View/Representations.
Получение коэффициентов VEC-модели
Для VEC-моделей оцененные коэффициенты сохраняются в трех разных двухмерных массивах: A, B и C. Массив A содержит параметры коррекции а, массив B содержит коинтегрирующие векторы Р’, а массив C содержит краткосрочные динамические параметры (коэффициенты на лагированные первые разностные члены).
• Первый индекс массива A — номер уравнения VEC-модели, в то время как второй индекс — номер коинтегрирующего уравнения. Например, A(2,1) — коэффициент коррекции первого коинтегрирующего уравнения во втором уравнении VEC-модели.
• Первый индекс массива B — номер коинтегрирующего уравнения, в то время как второй индекс — номер переменной в коинтегрирующем уравнении. Например, B(2,1) — коэффициент первой переменной во втором коинтегрирующем уравнении. Отметим, что эта схема индексации соответствует транспонированию р.
• Первый индекс массива C — номер уравнения VEC-модели, в то время как второй индекс — номер переменной первого разностного регрессора VEC-модели. Например, C(2,1) — коэффициент первого разностного регрессора во втором уравнении VEC-модели.
№32006
Вы можете получить доступ к каждому элементу этих коэффициентов, обращаясь к имени VEC-модели с последующей точкой и элементом коэффициента:
var01.a (2,1) var01.b (2,1) var01.c (2,1)
Чтобы увидеть соответствие между каждым элементом массивов A, B и C и оцененными коэффициентами, на панели инструментов VAR выберите опцию View/Representations.
Литература
ВербикМ. Путеводитель по современной эконометрике. М.: Научная книга, 2006.
Amisano Gianni and Giannini Carlo. Topics in Structural VAR Econometrics, 2-nd ed, Berlin: Springer-Verlag. 1997.
Blanchard Olivier and Quah Danny. «The Dynamic Effects of Aggregate Demand and Aggregate Supply Disturbances»//American Economic Review. 1989. № 79. Pp. 655-673.
Boswijk Peter H. «Identifiability of Cointegrated Systems» /Technical Report //Tinbergen Institute. 1995.
Christiano L. J., Eichenbaum M., Evans C. L. «Monetary Policy Shocks: What Have We Learned and to What End?». Chapter 2 in J. B. Taylor and M. Woodford, (eds.), Handbook of Macroeconomics. V. 1A, Amsterdam: Elsevier Science Publishers B.V. 1999.
Doornik Jurgen A. and Hansen Henrik. «An Omnibus Test for Univariate and Multivariate Normality»// Manuscript. 1994.
Engle R.F., Granger C.W.J. Cointegration and Error Correction: Representation, Estimation, and Testing// Econometrica. V. 55.1987. № 2.
Green W.H. Econometric Analysis (Fifth edition). Prentice Hall International, Inc., 2003.
Johansen S0ren. «Estimation and Hypothesis Testing of Cointegration Vectors in Gaussian Vector Autoregressive Models»//Econometrica. 1991. №59. Pp. 1551-1580.
Johansen Soren. Likelihood-based Inference in Cointegrated Vector Autoregressive Models. Oxford: Oxford University Press. 1995.
Johansen S$ren and Juselius Katarina. «Maximum Likelihood Estimation and Inferences on Cointegration — with applications to the demand for money»// Oxford Bulletin of Economics and Statistics. 1990. № 52. Pp. 169-210.
KelejianH. H.«An Extension of a Standard Test for Heteroskedasticity to a Systems Framework»// Journalof Econometrics. 1982. №20. Pp. 325-333.
Lutkepohl Helmut. Introduction to Multiple Time Series Analysis. New York: Springer-Verlag. 1991.
Osterwald-Lenum Michael. «A Note with Quantiles of the Asymptotic Distribution of the Maximum Likelihood Cointegration Rank Test Statistics»// Oxford Bulletin ofEconomics and Statistics. 1992. № 54. Pp. 461-472.
Pesaran M. Hashem and Shin Yongcheol. «Impulse Response Analysis in Linear Multivariate Models»// Economics Letters.1998. № 58. Pp. 17-29.
Sims Chris. «Macroeconomics and Reality»//Econometrica. 1980. №48. Pp. 1-48.
Urzua Carlos M.. «Omnibus Tests for Multivariate Normality Based on a Class of Maximum Entropy Distributions»//in Advances in Econometrics. V. 12. Greenwich, Conn.: JAI Press. 1997. Pp. 341-358.
White Halbert. «A Heteroskedasticity-Consistent Covariance Matrix and a Direct Test for Heteroskedasticity»// Econometrica. 1980. №48. Pp. 817-838.
EViews
Модель коррекции ошибок (МКО) является одной из наиболее широко используемых эконометрических моделей. Она позволяет анализировать долгосрочные взаимосвязи между переменными во временных рядах, в то время как традиционные модели, такие как модель VAR (векторной авторегрессии), ориентированы на короткосрочные отклонения от равновесия.
Основным предположением МКО является существование стационарного равновесия между переменными. Если ряды нестационарны, то МКО оценивает корректирующие коэффициенты, отражающие скорость возврата к равновесию после отклонения. Таким образом, МКО позволяет выявить долгосрочные связи и эффекты, которые исчезают в рамках короткосрочных моделей.
Eviews — это популярное программное обеспечение для анализа временных рядов и проведения эконометрических исследований. Оно предоставляет широкий набор инструментов для работы с МКО, включая возможность оценки моделей, тестирования гипотез, прогнозирования и построения графиков.
В данной статье будут рассмотрены основные принципы построения МКО в Eviews, включая выбор и спецификацию модели, проведение статистических тестов на стационарность и корректность спецификации, а также интерпретацию полученных результатов. Кроме того, будет представлено реальное применение МКО на примере анализа взаимосвязи между ВВП и индексом потребительских цен в России.
Содержание
- Модель коррекции ошибок в Eviews
- Основные принципы
- Применение модели коррекции ошибок
- Методика работы с моделью коррекции ошибок
- Преимущества использования модели коррекции ошибок
Модель коррекции ошибок в Eviews
Модель коррекции ошибок (Error Correction Model, ECM) является одним из основных методов анализа и прогнозирования в эконометрике. Она позволяет изучать и объяснять долгосрочные и краткосрочные взаимосвязи между экономическими переменными.
ECM активно применяется в Eviews — популярном пакете программного обеспечения для статистического анализа и прогнозирования. В Eviews модель коррекции ошибок может быть построена и оценена с использованием стандартных инструментов.
Основные принципы модели коррекции ошибок заключаются в идентификации долгосрочной равновесной связи между переменными и изучении корректирующей динамики. Для этого необходимо провести следующие шаги:
- Собрать данные о переменных, которые предполагается анализировать.
- Построить временные ряды для каждой переменной и произвести их статистический анализ (например, провести тест на стационарность).
- Оценить модель спецификации ECM с помощью метода наименьших квадратов или других подходов.
- Проверить статистическую значимость и соответствие модели.
- Проанализировать полученные результаты и сделать выводы о взаимосвязи между переменными.
Имея готовую модель коррекции ошибок в Eviews, можно использовать ее для различных целей:
- Прогнозирование значений переменных на основе долгосрочной равновесной связи.
- Анализ воздействия изменения одной переменной на другую в рамках коррекционной динамики.
- Оценка эффектов политики и регулирования на экономические переменные.
Таким образом, модель коррекции ошибок в Eviews является мощным инструментом анализа и прогнозирования в эконометрике. Она позволяет исследовать взаимосвязи между экономическими переменными и делать выводы о их влиянии друг на друга.
Основные принципы
Модель коррекции ошибок в Eviews является одним из наиболее распространенных инструментов анализа временных рядов. Она основана на предположении о наличии долгосрочного равновесия между переменными, и что отклонения от этого равновесия, называемые ошибками коррекции, являются временными и имеют тенденцию к возвращению к нулю.
Основные принципы модели коррекции ошибок в Eviews следующие:
- Определение соотношений равновесия: Сначала необходимо определить переменные, которые находятся в долгосрочном равновесии. Это могут быть, например, цены и доходы, спрос и предложение, процентные ставки и инфляция.
- Построение модели коррекции ошибок: С помощью Eviews можно построить модель коррекции ошибок, которая описывает связь между отклонениями от равновесия и скоростью их коррекции.
- Проверка стационарности: Важным шагом является проверка стационарности переменных ряда, так как модель коррекции ошибок требует, чтобы все переменные были стационарными или интегрированы одного порядка.
- Оценка параметров: Для построения модели коррекции ошибок требуется оценить параметры модели. Eviews позволяет использовать различные методы оценки, такие как Метод Наименьших Квадратов или Метод Максимального Правдоподобия.
- Анализ диагностики модели: После оценки параметров необходимо провести анализ диагностики модели, чтобы проверить ее адекватность и соответствие данным.
Модель коррекции ошибок в Eviews позволяет анализировать временные ряды, выделять долгосрочные и краткосрочные зависимости, а также прогнозировать значения переменных на основе их взаимодействия и коррекции ошибок.
Благодаря широкому функционалу и простому интерфейсу, Eviews является популярным инструментом для анализа временных рядов и моделирования отношений между переменными.
Применение модели коррекции ошибок
Модель коррекции ошибок (Error Correction Model, ECM) является широко используемым инструментом в эконометрике для анализа и моделирования долгосрочных связей между временными рядами. Она позволяет оценить коррекцию краткосрочных отклонений от долгосрочного равновесия.
Применение модели коррекции ошибок основано на предположении о существовании долгосрочного равновесного отношения между двумя или более временными рядами. Долгосрочное равновесие предполагает, что стохастический тренд рядов сходится к постоянной и устойчивой точке в долгосрочной перспективе.
Модель коррекции ошибок позволяет выявить и измерить долгосрочную и краткосрочную зависимость между временными рядами. Она основана на двух шагах:
- Оценка уравнения долгосрочного равновесия
- Оценка корректирующего коэффициента
В результате оценки модели коррекции ошибок можно получить следующую информацию:
- Статистическую значимость коэффициентов уравнения долгосрочного равновесия, которые определяют магнитуду и направление влияния рядов друг на друга в долгосрочном периоде.
- Статистическую значимость корректирующего коэффициента, который определяет скорость коррекции краткосрочных отклонений от долгосрочного равновесия.
- Коэффициент коррекции ошибок, который показывает, насколько быстро ряды вернутся к долгосрочному равновесию после случайных отклонений.
Применение модели коррекции ошибок в Eviews позволяет не только оценить статистическую значимость коэффициентов и интерпретировать полученные результаты, но и проводить различные эконометрические тесты, такие как тест Дики-Фуллера на стационарность рядов, тест Грейнджера на причинность, тест Хаусмана на эндогенность переменных и другие.
| Преимущества | Ограничения |
|---|---|
|
|
Методика работы с моделью коррекции ошибок
Модель коррекции ошибок (Error Correction Model, ECM) является мощным инструментом для анализа временных рядов и исследования долгосрочных экономических связей. Однако, для использования этой модели необходимо следовать определенной методике работы.
Вот некоторые основные принципы работы с моделью коррекции ошибок:
- Выбор переменных: При построении модели коррекции ошибок необходимо выбрать переменные, которые имеют долгосрочные экономические связи. Это могут быть переменные, которые теоретически связаны между собой или имеют схожую динамику.
- Оценка модели: Для оценки модели коррекции ошибок необходимо провести регрессионный анализ и получить оценки коэффициентов модели. Оценка может быть выполнена с использованием метода наименьших квадратов (OLS) или других методов, в зависимости от предполагаемой структуры модели.
- Проверка стационарности: После оценки модели необходимо проверить стационарность остатков. Для этого можно использовать различные статистические тесты, такие как тест Дики-Фуллера или тест Аугментированного Дики-Фуллера.
- Интерпретация результатов: После проверки стационарности остатков можно проанализировать полученные коэффициенты модели. Например, можно оценить значимость коэффициентов, их знаки и интерпретировать их экономический смысл.
- Прогнозирование: Модель коррекции ошибок также может быть использована для прогнозирования будущих значений переменных. Для этого необходимо продолжить временные ряды наблюдений и использовать оцененные коэффициенты модели для прогнозирования значений переменных в будущем.
Методика работы с моделью коррекции ошибок может варьироваться в зависимости от конкретной задачи и дополнительных условий. Однако, приведенные выше шаги являются общими и могут использоваться в большинстве случаев.
Важно помнить, что модель коррекции ошибок имеет свои ограничения и предполагает определенные предпосылки. Поэтому перед использованием этой модели необходимо провести тщательный анализ данных и убедиться, что модель является адекватной для конкретного исследования.
Преимущества использования модели коррекции ошибок
Модель коррекции ошибок (МКО) является важным инструментом в анализе временных рядов и представляет собой методологию оценки долгосрочного равновесия и коррекции дисбалансов. Вот несколько преимуществ использования модели коррекции ошибок:
-
Позволяет анализировать взаимосвязи между временными рядами:
МКО позволяет оценивать долгосрочные эффекты и взаимосвязи между временными рядами. Она позволяет выявить стационарные отношения и оценить скорость коррекции к равновесию. Это полезно для анализа факторов, влияющих на экономические явления и прогнозирования будущих значений.
-
Учитывает временную зависимость:
МКО учитывает временную зависимость в данных, что является важным при анализе многих экономических переменных. Это позволяет более точно предсказывать будущие значения на основе прошлых данных.
-
Позволяет оценить коррекцию дисбалансов:
МКО позволяет оценить скорость коррекции дисбалансов в экономической системе. Это полезно для выявления и анализа стабильности и устойчивости системы. Она также может использоваться для определения оптимальных мер по коррекции дисбалансов.
-
Устраняет эндогенность:
МКО является мощным инструментом для устранения эндогенности при анализе экономических явлений. Она позволяет оценить долгосрочные эффекты независимых переменных на зависимую переменную, учитывая ее эндогенность, что обеспечивает более точные и надежные результаты.
-
Является эффективным инструментом прогнозирования:
МКО является эффективным инструментом для прогнозирования будущих значений временных рядов. Она позволяет использовать информацию о текущих и прошлых значениях, чтобы предсказывать будущие значения. Это может быть полезно для принятия инвестиционных решений и планирования бизнеса.
В целом, модель коррекции ошибок является ценным инструментом для анализа временных рядов и прогнозирования экономических явлений. Ее использование позволяет получить более точные и надежные результаты, учитывая особенности данных и системы.
Модель коррекции ошибок является одним из наиболее популярных и эффективных инструментов анализа временных рядов. Она широко применяется в экономической и финансовой сферах для оценки долгосрочных связей между различными переменными. Одним из наиболее известных программных инструментов для работы с моделями коррекции ошибок является EViews.
EViews — это мощное программное обеспечение для анализа временных рядов, разработанное для удовлетворения потребностей исследователей, студентов и профессионалов в области экономики и финансов. Одной из главных особенностей EViews является его способность работать с моделями коррекции ошибок, позволяя пользователям учесть возможные ошибки и нарушения в данных.
Применение модели коррекции ошибок в EViews позволяет исследователям анализировать долгосрочные связи между переменными, оценивать их взаимодействие и делать прогнозы на будущее. Программа предоставляет широкий набор инструментов для оценки и интерпретации моделей коррекции ошибок, позволяя проводить разнообразные эконометрические анализы и исследования.
Уникальная комбинация функциональности EViews и его возможность работать с моделями коррекции ошибок делает его востребованным инструментом для проведения эвристических исследований, оценки эффектов переменных и моделирования различных сценариев.
В целом, модель коррекции ошибок в программе EViews позволяет исследователям проводить сложные анализы временных рядов, выявлять долгосрочные зависимости между переменными и делать прогнозы на будущее. Расширенные возможности программы EViews в сочетании с эффективностью модели коррекции ошибок делают его неотъемлемым инструментом для профессионалов в области экономики и финансов.
Содержание
- Ошибки в программе EViews: влияние и проблемы
- Модель коррекции ошибок: основные концепции
- Особенности модели коррекции ошибок в EViews
- Графическое представление результатов
- Примеры применения модели коррекции ошибок в EViews
Ошибки в программе EViews: влияние и проблемы
В процессе работы с программой EViews, как и с любым другим программным обеспечением, возникают ошибки. Ошибки могут быть разного типа и иметь разное влияние на работу пользователя.
1. Синтаксические ошибки:
- Синтаксические ошибки возникают при неправильном использовании команд или неверном написании кода.
- Такие ошибки обычно приводят к невозможности выполнить код или получить некорректные результаты.
- Исправление синтаксических ошибок требует внимательного анализа кода и выявления неправильно написанных команд.
2. Логические ошибки:
- Логические ошибки возникают, когда программа выполняет неправильные действия или получает неверные результаты.
- Они могут возникать, например, из-за неправильного определения переменных или неправильной логики расчетов.
- Исправление логических ошибок требует более глубокого анализа алгоритмов и логики программы.
3. Ошибки данных:
- Ошибки данных возникают, когда программа работает с некорректными или неполными данными.
- Например, это может быть неверный формат данных, отсутствие данных или некорректные значения.
- Исправление ошибок данных требует проверки и обработки данных для обеспечения их корректности.
4. Ошибки взаимодействия:
- Ошибки взаимодействия возникают при неправильном использовании функций или при несовместимости разных частей программы.
- Они могут приводить к некорректным результатам или даже к полной неработоспособности программы.
- Исправление таких ошибок требует анализа использования функций, проверки совместимости компонентов программы и их настройки.
Ошибки в программе EViews могут привести к неверным результатам и затруднить работу пользователя. Поэтому важно внимательно следить за возникающими ошибками, исследовать их причины и принимать меры для их предотвращения и устранения. С помощью правильного использования и понимания программы EViews можно минимизировать возникновение ошибок и обеспечить более эффективное использование программного обеспечения.
Модель коррекции ошибок: основные концепции
Модель коррекции ошибок (error correction model, ECM) – это статистическая модель, используемая для анализа связи между переменными, которые могут быть как интегрированными, так и коинтегрированными. Основная идея модели коррекции ошибок заключается в том, что если две или более переменные являются коинтегрированными, то они будут в долгосрочном равновесии, но в краткосрочном периоде могут отклоняться друг от друга. Модель коррекции ошибок позволяет изучить долгосрочные и краткосрочные динамики этих переменных.
Основные концепции модели коррекции ошибок:
- Интегрированность переменных. Интегрированность означает, что переменные имеют внутренний тренд и могут меняться с течением времени. В модели коррекции ошибок используются переменные, которые являются интегрированными. Обычно используются переменные первого разности, которые могут быть стационарными.
- Коинтеграция. Коинтеграция означает, что две или более переменные имеют в долгосрочном периоде стабильные доли или отношения, то есть они движутся вместе в долгосрочном равновесии, несмотря на краткосрочные отклонения. Коинтеграцию можно проверить с помощью статистических тестов, таких как тест на единичные корни (unit root test) и тест на наличие коинтеграции (cointegration test).
- Ошибки коррекции. Ошибки коррекции (error correction term) являются основным компонентом модели коррекции ошибок. Они представляют собой показатель скорости коррекции долгосрочного равновесия после возникновения краткосрочных отклонений. Обычно они отображают значительное отрицательное значение, что указывает на существование механизма коррекции ошибок.
- Константа и тренд. В модели коррекции ошибок могут использоваться константа и тренд, которые учитывают различные факторы, влияющие на рассматриваемые переменные. Константа представляет постоянный член модели, а тренд отражает изменение переменных со временем.
- Краткосрочная и долгосрочная динамика. Модель коррекции ошибок позволяет исследовать как краткосрочные, так и долгосрочные динамики переменных. Краткосрочная динамика характеризуется отклонениями от долгосрочного равновесия, тогда как долгосрочная динамика отражает скорость коррекции ошибок и возвращение переменных к равновесному состоянию.
Модель коррекции ошибок широко применяется в эконометрике и финансовом анализе для изучения связей между переменными, а также для прогнозирования и моделирования временных рядов. Она позволяет более глубоко понять долгосрочные и краткосрочные динамики переменных, а также определить взаимосвязи и влияние одной переменной на другую.
Особенности модели коррекции ошибок в EViews
Модель коррекции ошибок (Error Correction Model, ECM) – это статистическая модель, используемая для анализа отношений между временными рядами. Модель коррекции ошибок основана на предположении о наличии долгосрочного равновесия между переменными, при этом краткосрочное отклонение от равновесия исправляется коррекцией ошибки.
В программе EViews модель коррекции ошибок может быть построена с помощью специальной процедуры ECM Estimation. При этом необходимо иметь базу данных с временными рядами переменных, которые необходимо анализировать.
Особенности модели коррекции ошибок в EViews:
- Определение порядка интеграции – перед построением модели коррекции ошибок необходимо определить порядок интеграции временных рядов переменных. Для этого можно воспользоваться тестами на стационарность, такими как тест Дики-Фуллера.
- Выбор лагов – для построения модели коррекции ошибок необходимо выбрать количество лагов, которые будут использованы в модели. Оптимальное количество лагов можно выбрать с помощью информационных критериев, таких как AIC и BIC.
- Проверка наличия коррекции ошибки – после построения модели коррекции ошибок необходимо проверить наличие коррекции ошибки. Для этого можно воспользоваться тестом на статистическую значимость коэффициента коррекции ошибки.
- Анализ коэффициентов модели – в модели коррекции ошибок коэффициенты представляют собой долгосрочные и краткосрочные эффекты переменных на равновесие. Анализ коэффициентов позволяет определить силу и направление взаимосвязи между переменными.
- Прогнозирование переменных – модель коррекции ошибок также может быть использована для прогнозирования переменных на будущий период времени. Для этого необходимо выполнить расчет коррекции ошибки и использовать полученные значения для прогнозирования.
В целом, модель коррекции ошибок в программе EViews позволяет анализировать и прогнозировать взаимосвязи между переменными, учитывая долгосрочное равновесие и коррекцию краткосрочных отклонений от равновесия.
Графическое представление результатов
Одной из важных возможностей программы EViews является графическое представление результатов анализа и моделирования данных. Графики могут помочь в визуализации и понимании полученных результатов, что особенно полезно при анализе временных рядов и прогнозировании.
EViews предлагает широкий спектр графических инструментов для визуализации данных. Встроенные графические функции позволяют строить линейные графики, гистограммы, диаграммы рассеяния, ящики с усами и другие типы графиков.
Для построения графиков в EViews необходимо выбрать нужные переменные и указать параметры графика. Например, для построения временного ряда достаточно указать название переменной и выбрать тип графика — линейный график. При этом можно указать дополнительные параметры, такие как цвет линии, ширина линии и др.
Графическое представление результатов может быть использовано в различных ситуациях. Например, при анализе временных рядов можно построить график колебания значений переменной во времени и выявить тенденции, цикличность и сезонность. При моделировании данных графики позволяют оценить соответствие модели данным, проверить предположения о распределении ошибок и т.д.
Кроме того, EViews позволяет экспортировать графики в различные форматы (например, PNG, JPEG, PDF) для дальнейшего использования в отчетах и презентациях. Это удобно при подготовке научных статей, диссертаций и других документов, требующих представления результатов в графической форме.
В целом, графическое представление результатов является важным этапом в анализе данных и моделировании. Оно помогает наглядно представить полученные результаты и лучше понять структуру и закономерности данных.
Примеры применения модели коррекции ошибок в EViews
Модель коррекции ошибок (VЕСМ) является одним из наиболее распространенных методов анализа временных рядов в эконометрике. Эта модель позволяет оценить долгосрочные и краткосрочные отклонения между двумя или более временными рядами и их корректировку на основе найденных параметров.
В программе EViews можно легко построить модель коррекции ошибок и провести анализ временных рядов. Приведем некоторые примеры применения модели коррекции ошибок в EViews:
- Анализ связи между ВВП и инвестициями. Предположим, что мы хотим изучить связь между ВВП и инвестициями в экономике страны. Мы можем построить модель коррекции ошибок, в которой ВВП будет выступать в качестве зависимой переменной, а инвестиции — в качестве независимой переменной. После оценки модели мы сможем определить, насколько инвестиции влияют на ВВП и как долгосрочные и краткосрочные отклонения двух переменных взаимосвязаны.
- Прогнозирование курса валюты. Если нам интересно прогнозировать курс валюты для инвестиционных решений, мы можем использовать модель коррекции ошибок. Например, мы можем построить модель, в которой курс валюты будет зависимой переменной, а различные факторы, такие как инфляция и процентные ставки, — независимые переменные. После оценки модели мы сможем предсказать будущие значения курса валют и оценить корректирующий механизм, который позволяет сглаживать отклонения между фактическими и прогнозными значениями.
- Анализ связи между ценами на нефть и акции нефтяных компаний. Если мы хотим изучить взаимосвязь между ценами на нефть и акциями нефтяных компаний, мы можем построить модель коррекции ошибок. В этой модели цены на нефть будут зависимой переменной, а цены на акции нефтяных компаний — независимыми переменными. Мы сможем оценить, насколько цены на нефть влияют на цены на акции и как корректируются отклонения между двумя рядами в долгосрочной и краткосрочной перспективе.
Приведенные примеры демонстрируют разнообразные области применения модели коррекции ошибок в EViews. Это мощный инструмент для анализа временных рядов и прогнозирования, который может быть использован в различных сферах, включая экономику, финансы, маркетинг и другие.