Сообщения без ответов | Активные темы
| ПРЯМО СЕЙЧАС: |
| Автор | Сообщение |
|---|---|
|
|
Заголовок сообщения: Как работает усилитель ошибки в TL494?
|
|
Прорезались зубы
Зарегистрирован: Вс янв 09, 2011 00:34:11 Рейтинг сообщения: 0
|
Всем привет! Пытаюсь разобраться с микросхемой TL494 и возникли вопросы. |
| Вернуться наверх |
Профиль
|

| Реклама | |
|
|
|
|
Andy61 |
Заголовок сообщения: Re: Как работает усилитель ошибки в TL494?
|
||
Карма: 2 Рейтинг сообщения: 0
|
|||
| Вернуться наверх | |||

| Реклама | |
|
|
|

|
cat-dog-god0 |
Заголовок сообщения: Re: Как работает усилитель ошибки в TL494?
|
|
Зарегистрирован: Вс янв 09, 2011 00:34:11 Рейтинг сообщения: 0
|
Andy61 писал(а): Поиск юзали? Дело в том, что я не совсем понимаю принцип работы ОУ. А меня именно это и интересует — как включить усилитель ошибки? |
| Вернуться наверх | |
|
Andy61 |
Заголовок сообщения: Re: Как работает усилитель ошибки в TL494?
|
||
Карма: 2 Рейтинг сообщения: 0
|
cat-dog-god0 писал(а): принцип работы ОУ А вот с этого и начните |
||
| Вернуться наверх | |||
| Реклама | |
|
|
|

|
cat-dog-god0 |
Заголовок сообщения: Re: Как работает усилитель ошибки в TL494?
|
|
Зарегистрирован: Вс янв 09, 2011 00:34:11 Рейтинг сообщения: 0
|
Andy61 писал(а): Вникните (хотя бы в общих чертах) в работу операционника, а затем «внутрь» 494-й Здесь на сайте есть раздел про ОУ, я его посмотрел — все понятно. Но, в схемах с TL494 ОУ каждый конструктор включает по разному, используя его как компаратор; используя или не используя обратную связь. А тему я создал, чтобы выяснить, как те или иные значения на входе ОУ, способы включения влияют на работу микросхемы. |
| Вернуться наверх | |
| Реклама | |
|
|
|
|
Andy61 |
Заголовок сообщения: Re: Как работает усилитель ошибки в TL494?
|
||
Карма: 2 Рейтинг сообщения: 0
|
|||
| Вернуться наверх | |||
Кто сейчас на форуме |
|
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 10 |
| Вы не можете начинать темы Вы не можете отвечать на сообщения Вы не можете редактировать свои сообщения Вы не можете удалять свои сообщения Вы не можете добавлять вложения |

Tl494 как работает усилитель ошибки
TL494 (Texas Instruments) — это наверное самый распространённый ШИМ-контроллер, на базе которого создавалась основная масса компьютерных блоков питания, и силовые части различных бытовых приборов.
Да и сейчас эта микросхема довольно популярна среди радиолюбителей, занимающихся построением импульсных блоков питания. Отечественный аналог этой микросхемы — М1114ЕУ4 (КР1114ЕУ4). Кроме того ещё разные зарубежные фирмы выпускают данную микросхему с разными названиями. Например IR3M02 (Sharp), KA7500 (Samsung), MB3759 (Fujitsu). Всё это одна и та же микросхема.
Возраст её гораздо моложе TL431. Выпускаться он начала фирмой Texas Instruments где то с конца 90-х — начала 2000-х годов.
Давайте-ка вместе попробуем разобраться, что она из себя представляет и что это за «зверь» такой? Рассматривать мы будем микросхему TL494 (Texas Instruments).
И так, для начала посмотрим, что у неё внутри.
Состав.
В её составе имеется:
— генератор пилообразного напряжения (ГПН);
— компаратор регулировки мертвого времени (DA1);
— компаратор регулировки ШИМ (DA2);
— усилитель ошибки 1 (DA3), используется в основном по напряжению;
— усилитель ошибки 2 (DA4), используется в основном по сигналу ограничения тока;
— стабильный источник опорного напряжения (ИОН) на 5В с внешним выводом 14;
— схема управления работой выходного каскада.
Потом все её составные части мы конечно рассмотрим и постараемся разобраться, для чего всё это нужно и как всё это работает, но для начала необходимо будет привести её рабочие параметры (характеристики).
Рекомендуемые рабочие параметры.
| Параметры | Мин. | Макс. | Ед. Изм. |
| VCC Напряжение питания | 7 | 40 | В |
| VI Напряжение на входе усилителя | -0,3 | VCC – 2 | В |
| VO Напряжение на коллекторе | 40 | В | |
| Ток коллектора (каждого транзистора) | 200 | мА | |
| Ток обратной связи | 0,3 | мА | |
| fOSC Частота генератора | 1 | 300 | кГц |
| CT Емкость конденсатора генератора | 0,47 | 10000 | нФ |
| RT Сопротивление резистора генератора | 1,8 | 500 | кОм |
| TA Рабочая температура TL494C TL494I |
0 | 70 | °C |
| -40 | 85 | °C |
Предельные её характеристики следующие;
Общая мощность рассеивания в непрерывном режиме….1Вт
Расположение и назначение выводов микросхемы.
Это не инвертирующий (положительный) вход усилителя ошибки 1.
Если входное напряжение на нём будет ниже, чем напряжение на выводе 2, то на выходе этого усилителя ошибки 1, напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если на этом выводе напряжение будет выше, чем на выводе 2, то на выходе этого усилителя 1, появится напряжение (выход усилителя 1, будет иметь высокий уровень) и ширина (скважность) выходных импульсов будет уменьшаться тем больше, чем выше выходное напряжение этого усилителя (максимум 3,3 вольта).
Это инвертирующий (отрицательный) вход усилителя сигнала ошибки 1.
Если входное напряжение на этом выводе выше, чем на выводе 1, на выходе усилителя ошибки напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если же напряжение на этом выводе ниже, чем на выводе 1, выход усилителя будет иметь высокий уровень.
Усилитель ошибки, это обычный ОУ с коэффициентом усиления порядка = 70..95дБ по постоянному напряжению, (Ку = 1 на частоте 350 кГц). Диапазон входных напряжений ОУ простирается от -0.3В и до напряжения питания, минус 2В. То есть максимальное входное напряжение должно быть ниже напряжения питания минимум на два вольта.
Это выходы усилителей ошибки 1 и 2, соединённых с этим выводом через диоды (схема ИЛИ). Если напряжение на выходе какого-либо усилителя меняется с низкого на высокий уровень, то на выводе 3 оно также переходит в высокий.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе микросхемы пропадают (нулевая скважность).
Если напряжение на этом выводе близко к 0 В, тогда длительность выходных импульсов (скважность) будет максимальна.
Вывод 3 обычно используется для обеспечения ОС усилителей, но если это необходимо, то вывод 3 может быть использован и в качестве входного, для обеспечения изменения ширины импульсов.
Если напряжение на нем высокое (>
3,5 В), то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Он управляет диапазоном изменения «мёртвого» времени (англ. Dead-Time Control), в принципе это та же самая скважность.
Если напряжение на нем будет близко к 0 В, то на выходе микросхемы будут, как минимально возможные, так и максимальные по ширине импульсы, что соответственно может задаваться другими входными сигналами (усилители ошибок, вывод 3).
Если напряжение на этом выводе будет около 1,5 В, то ширина выходных импульсов будет в районе 50% от их максимальной ширины.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Но стоит не забывать, что при увеличении «мёртвого» времени, диапазон регулировки ШИМ будет уменьшаться.
Изменяя напряжение на выводе 4, можно задавать фиксированную ширину «мёртвого» времени (R-R делителем), осуществить в БП режим мягкого старта (R-C цепочкой), обеспечить дистанционное выключение МС (ключ), а также можно использовать этот вывод, как линейный управляющий вход.
Давайте рассмотрим (для тех, кто не знает), что такое «мёртвое» время и для чего оно нужно.
При работе двухтактной схемы БП, импульсы поочерёдно подаются с выходов микросхемы на базы (затворы) выходных транзисторов. Так как любой транзистор — элемент инерционный, он не может мгновенно закрыться (открыться) при снятии (подаче) сигнала с базы (затвора) выходного транзистора. И если на выходные транзисторы подавать импульсы без «мёртвого» времени (то есть с одного импульс снять и на второй сразу подать), может наступить такой момент, когда один транзистор не успеет закрыться, а второй уже открылся. Тогда весь ток (называется сквозной ток) потечёт через оба открытых транзистора минуя нагрузку (обмотку трансформатора), и так как он ни чем не будет ограничен, выходные транзисторы мгновенно выйдут из строя.
Чтобы такое не произошло, необходимо после окончания одного импульса и до начала следующего — прошло какое-то определённое время, достаточное для надёжного закрытия того выходного транзистора, со входа которого снят управляющий сигнал.
Это время и называется «мёртвым» временем.
Да, ещё если посмотреть рисунок с составом микросхемы, то мы видим, что вывод 4 соединён со входом компаратора регулировки мертвым временем (DA1) через источник напряжения, величиной 0,1-0,12 В. Для чего это сделано?
Это как раз и сделано для того, чтобы максимальная ширина (скважность) выходных импульсов никогда не была равна 100%, для обеспечения безопасной работы выходных (выходного) транзисторов.
То есть если «посадить» вывод 4 на общий провод, то на входе компаратора DA1 всё равно не будет нулевого напряжения, а будет напряжение как раз этой величины (0,1-0,12 В) и импульсы с генератора пилообразного напряжения (ГПН) появятся на выходе микросхемы только тогда, когда их амплитуда на выводе 5, превысит это напряжение. То есть микросхема имеет фиксированный максимальный порог скважности выходных импульсов, который не превысит для однотактного режима работы выходного каскада 95-96%, и для двухтактного режима работы выходного каскада — 47,5-48%.
Это вывод ГПН, он предназначен для подключения к нему времязадающего конденсатора Ct, второй конец которого подсоединяется к общему проводу. Ёмкость его выбирается обычно от 0,01 мкФ до 0,1 мкФ, в зависимости от выходной частоты ГПН импульсов ШИМ-контроллера. Как правило здесь используются конденсаторы высокого качества.
Выходную частоту ГПН можно как раз контролировать на этом выводе. Размах выходного напряжения генератора (амплитуда выходных импульсов) где-то в районе 3-х вольт.
Тоже вывод ГПН, предназначенный для подключения к нему врямя-задающего резистора Rt, второй конец которого подсоединяется к общему проводу.
Величины Rt и Ct определяют выходную частоту ГПН, и рассчитываются по формуле для однотактного режима работы;
Где F, R, C — кГц, кОм, мкФ. Для двухтактного режима работы формула имеет следующий вид;
Для ШИМ-контроллеров других фирм, частота рассчитывается по такой же формуле, за исключением — цифру 1 необходимо будет поменять на 1,1.
Он присоединяется к общему проводу схемы устройства на ШИМ-контроллере.
В составе микросхемы имеется выходной каскад с двумя выходными транзисторами, которые являются ее выходными ключами. Выводы коллекторов и эмиттеров этих транзисторов свободные, и поэтому в зависимости от необходимости, эти транзисторы можно включать в схему для работы как с общим эмиттером, так и с общим коллектором.
В зависимости от напряжения на выводе 13, этот выходной каскад может работать как в двухтактном режиме работы, так и в однотактном. В однотактном режиме работы эти транзисторы можно соединять параллельно для увеличения тока нагрузки, что обычно и делают.
Так вот, вывод 8, это вывод коллектора транзистора 1.
Это вывод эмиттера транзистора 1.
Это вывод эмиттера транзистора 2.
Это коллектор транзистора 2.
К этому выводу подсоединяется «плюс» источника питания TL494CN.
Это вывод выбора режима работы выходного каскада. Если этот вывод подсоединить к общему проводу, выходной каскад будет работать в однотактном режиме. Выходные сигналы на выводах транзисторных ключей будут одинаковыми.
Если подать на этот вывод напряжение +5 В (соединить между собой выводы 13 и 14), то выходные ключи будут работать в двухтактном режиме. Выходные сигналы на выводах транзисторных ключей будут противофазны и частота выходных импульсов будет в два раза меньше.
Это выход стабильного Источника Опорного Напряжения (ИОН), С выходным напряжением +5 В и выходным током до 10 мА, которое может быть использовано в качестве образцового для сравнения в усилителях ошибки, и в других целях.
Он работает точно так же, как и вывод 2. Если второй усилитель ошибки не используется, то вывод 15 просто подключают к 14-му выводу (опорное напряжение +5 В).
Он работает так же, как и вывод 1. Если второй усилитель ошибки не используется, то его обычно подключают к общему проводу (вывод 7).
С выводом 15, подключенным к +5 В и выводом 16, подключенным к общему проводу, выходное напряжение второго усилителя отсутствует, поэтому он не оказывает никакого влияния на работу микросхемы.
Принцип работы микросхемы.
Так как же работает ШИМ-контроллер TL494.
Выше мы подробно рассмотрели назначение выводов этой микросхемы и какую функцию они выполняют.
Если всё это тщательно проанализировать, то из всего этого становится ясно, как работает эта микросхема. Но я ещё раз очень кратко опишу принцип её работы.
При типовом включении микросхемы и подаче на неё питания (минус на вывод 7, плюс на вывод 12), ГПН начинает вырабатывать пилообразные импульсы, амплитудой около 3-х вольт, частота которых зависит от подключенных С и R к выводам 5 и 6 микросхемы.
Если величина управляющих сигналов (на выводе 3 и 4) меньше 3-х вольт, то на выходных ключах микросхемы появляются прямоугольные импульсы, ширина которых (скважность) зависит от величины управляющих сигналов на выводе 3 и 4.
То есть в микросхеме идёт сравнение положительного пилообразного напряжения с конденсатора Ct (C1) с любым из двух управляющих сигналов.
Логические схемы управления выходными транзисторами VT1 и VT2, открывают их только тогда, когда напряжение пилообразных импульсов выше сигналов управления. И чем больше эта разница, тем шире выходной импульс (больше скважность).
Управляющее напряжение на выводе 3 в свою очередь зависит от сигналов на входах операционных усилителей (усилителей ошибок), которые в свою очередь могут контролировать выходное напряжение и выходной ток БП.
Таким образом, увеличение или уменьшение величины какого либо управляющего сигнала, вызывает соответственно линейное уменьшение или увеличение ширины импульсов напряжения на выходах микросхемы.
В качестве управляющих сигналов, как уже было сказано выше, может быть использовано напряжение с вывода 4 (управление «мертвым временем»), входы усилителей ошибки или вход сигнала обратной связи непосредственно с вывода 3.
Теория, как говорится теорией, но гораздо будет лучше всё это посмотреть и «пощупать» на практике, поэтому соберём на макетной плате следующую схемку и посмотрим воочию, как всё это работает.
Самый простой и быстрый способ — собрать всё это на макетной плате. Да, микросхему я поставил КА7500. Вывод «13» микросхемы посадил на общий провод, то есть у нас выходные ключи будут работать в однотактном режиме (сигналы на транзисторах будут одинаковыми), а частота повторения выходных импульсов, будет соответствовать частоте пилообразного напряжения ГПН.
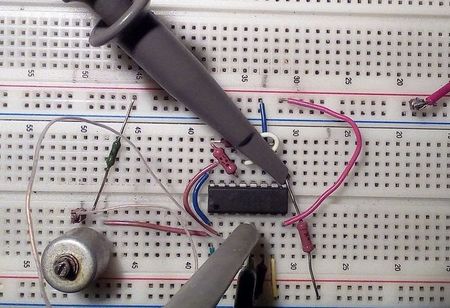
Осциллограф я подключил к следующим контрольным точкам:
— Первый луч к выводу «4», для контроля постоянного напряжения на этом выводе. Находится в центре экрана на нулевой линии. Чувствительность — 1 вольт на деление;
— Второй луч к выводу «5», для контроля пилообразного напряжения ГПН. Находится он так же на нулевой линии (совмещены оба луча) в центре осциллографа и с такой же чувствительностью;
— Третий луч на выход микросхемы к выводу «9», для контроля импульсов на выходе микросхемы. Чувствительность луча 5 вольт на деление (0,5 вольт, плюс делитель на 10). Находится в нижней части экрана осциллографа.
Забыл сказать, выходные ключи микросхемы подключены с общим коллектором. По другому сказать — по схеме эмиттерного повторителя. Почему повторителя? Потому что сигнал на эмиттере транзистора в точности повторяет сигнал базы, чтобы нам всё было хорошо видно.
Если снимать сигнал с коллектора транзистора, то он будет инвертирован (перевёрнут) по отношению к сигналу базы.
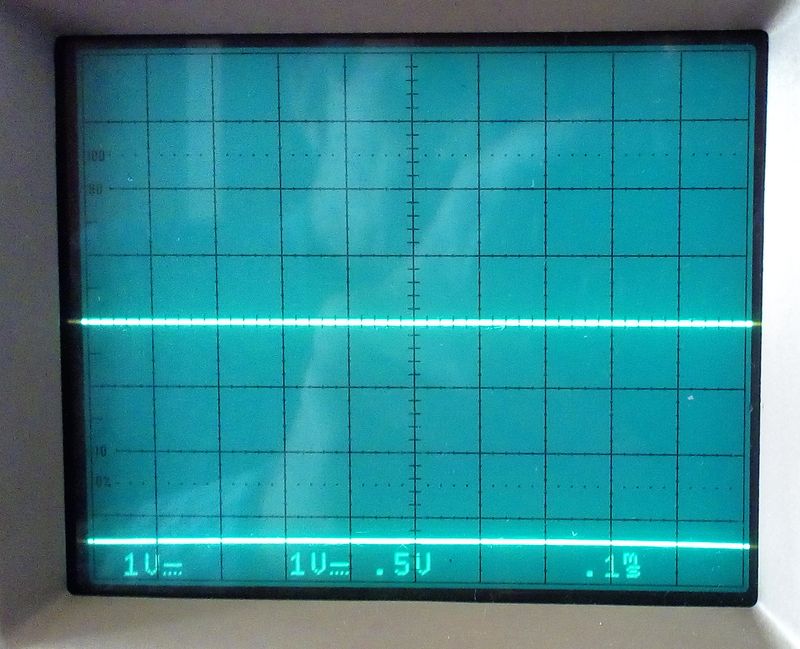
Подаём питание на микросхему и смотрим что у нас имеется на выводах.
На четвёртой ножке у нас ноль (бегунок подстроечного резистора в крайнем нижнем положении), первый луч находится на нулевой линии в центре экрана. Усилители ошибки тоже не работают.
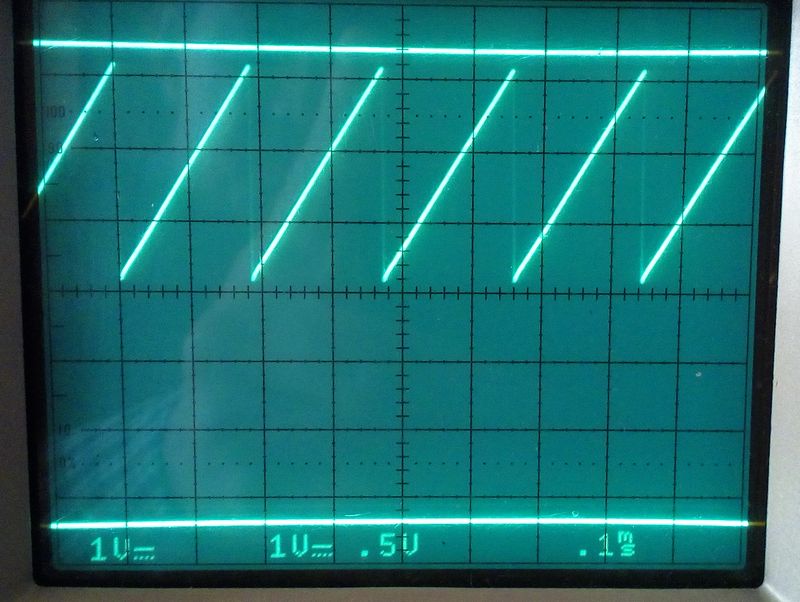
На пятой ножке мы видим пилообразное напряжение ГПН (второй луч), амплитудой чуть больше 3-х вольт.
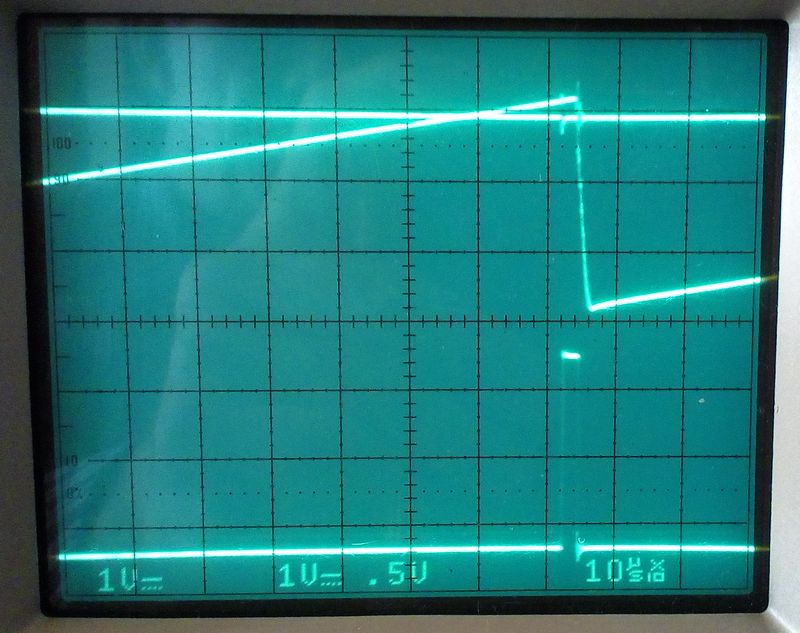
На выходе микросхемы (вывод 9) мы видим прямоугольные импульсы, амплитудой около 15-ти вольт и максимальной ширины (96%). Точки в нижней части экрана — это как раз фиксированный порог скважности и есть. Чтобы его было лучше видно, включим растяжку на осциллографе.
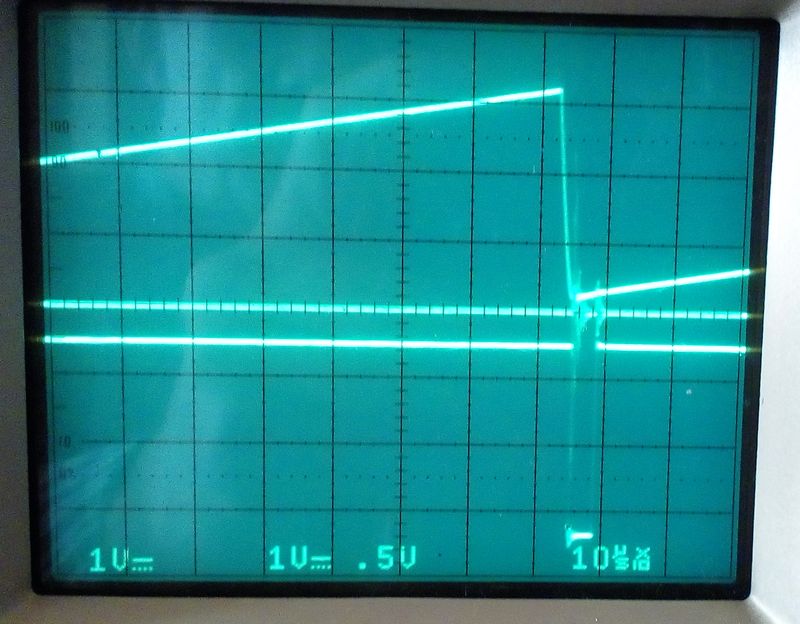
Ну вот, сейчас видно лучше. Это как раз и есть время, когда амплитуда импульса падает до нуля и выходной транзистор закрыт это короткое время. Уровень нуля для этого луча в нижней части экрана.
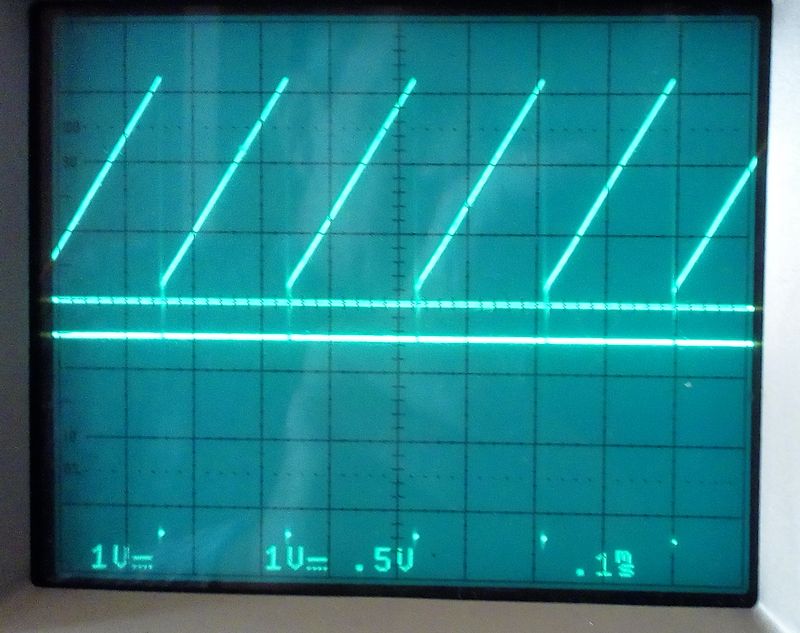
Ну что, давайте добавим напряжение на вывод «4» и посмотрим что у нас получается.
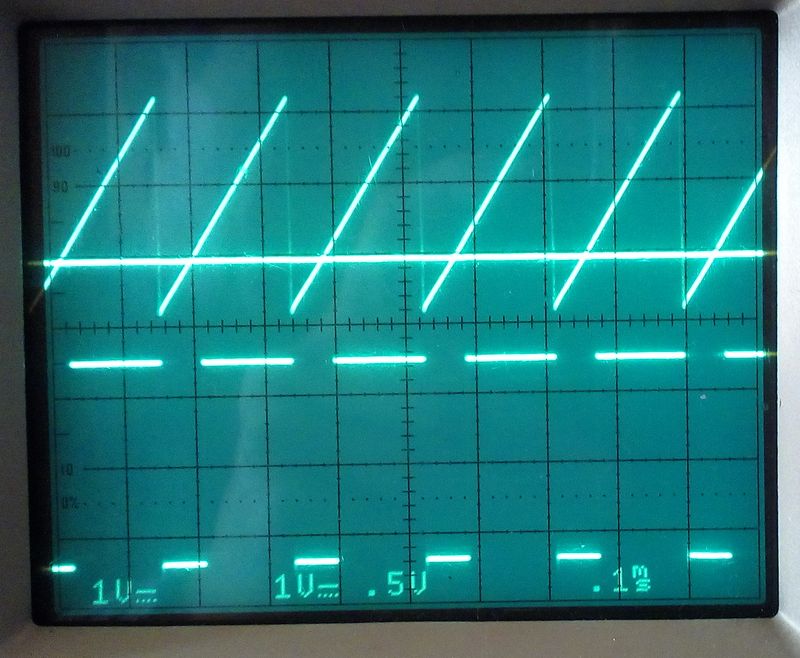
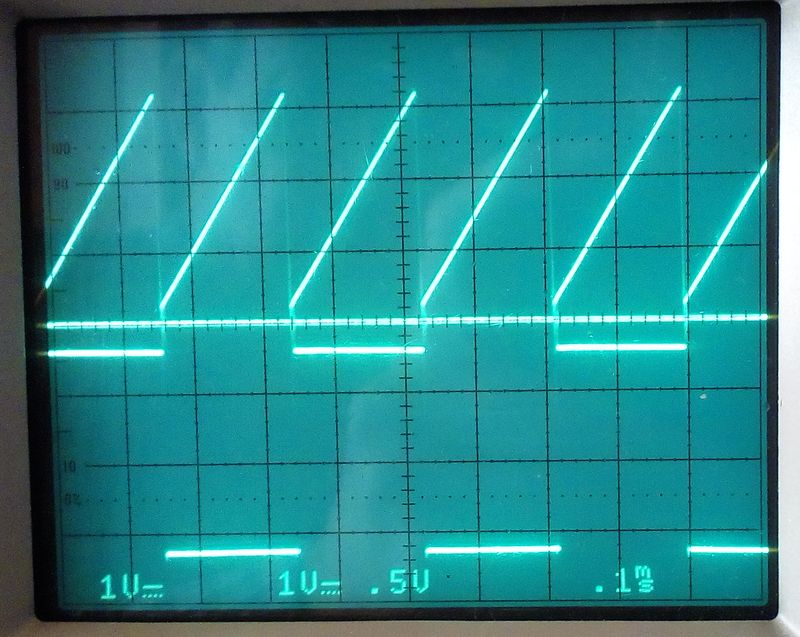
На выводе «4» подстроечным резистором я установил постоянное напряжение величиной 1 вольт, первый луч поднялся на одно деление (прямая линия на экране осциллографа). Что мы видим? Мёртвое время увеличилось (уменьшилась скважность), это пунктирная линия в нижней части экрана. То есть выходной транзистор закрыт на время уже примерно на половину длительности самого импульса.
Добавим ещё один вольт подстроечным резистором на вывод «4» микросхемы.
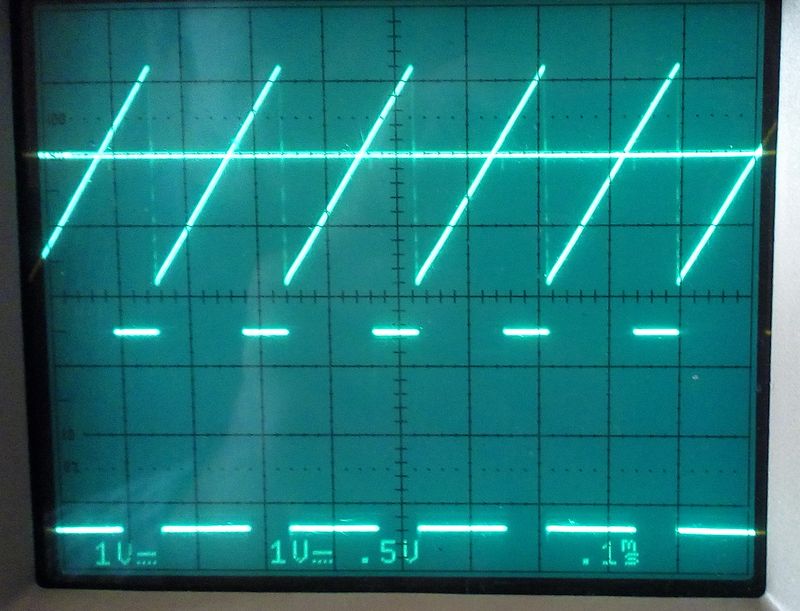
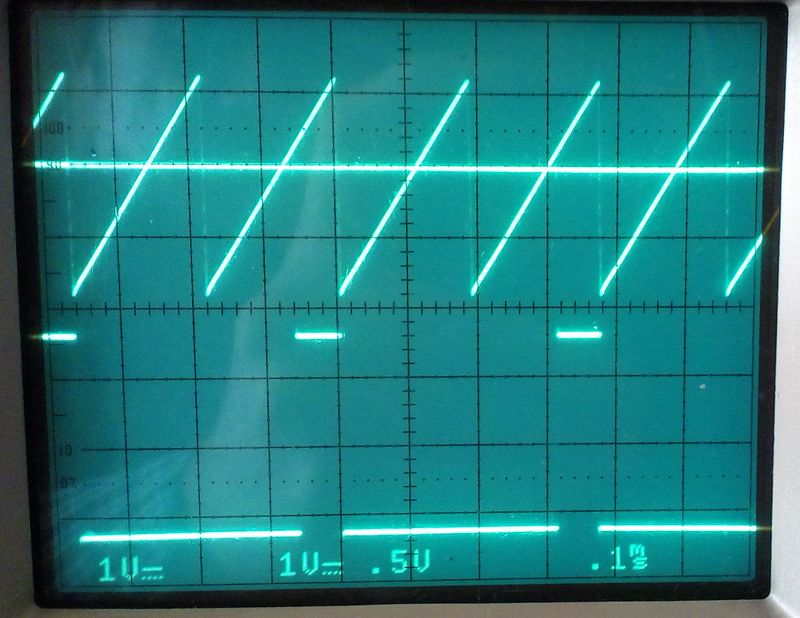
Мы видим, что первый луч поднялся ещё на одно деление вверх, длительность выходных импульсов стала ещё меньше (1/3 от длительности всего импульса), а мёртвое время (время закрытия выходного транзистора) увеличилось до двух третьей. То есть наглядно видно, что логика микросхемы сравнивает уровень сигнала ГПН с уровнем управляющего сигнала, и пропускает на выход только тот сигнал ГПН, уровень которого выше управляющего сигнала.
Чтобы стало ещё понятней — длительность (ширина) выходных импульсов микросхемы будет такой, какой является длительность (ширина) выходных импульсов пилообразного напряжения находящихся выше уровня управляющего сигнала (выше прямой линии на экране осциллографа).
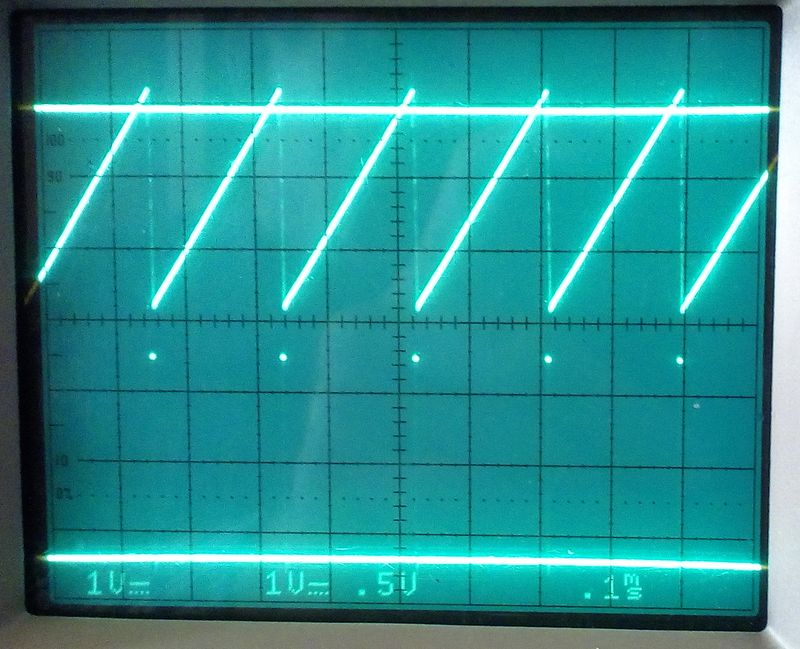
Идём дальше, добавляем ещё один вольт на вывод «4» микросхемы. Что мы видим? На выходе микросхемы очень короткие импульсы, по ширине примерно такие же, как и выступающие выше прямой линии верхушки пилообразного напряжения. Включим растяжку на осциллографе, чтобы импульс было лучше видно.
Вот, мы видим короткий импульс, в течении которого выходной транзистор будет открыт, а всё остальное время (нижняя линия на экране) будет закрыт.
Ну что, попробуем поднять напряжение на выводе «4» ещё больше. Ставим подстроечным резистором напряжение на выводе выше уровня пилообразного напряжения ГПН.
Ну всё, БП у нас перестанет работать, так как на выходе полный «штиль». Выходных импульсов нет, так как на управляющем выводе «4» у нас постоянное напряжение уровнем больше 3,3 вольта.
Абсолютно то же самое будет, если подавать управляющий сигнал и на вывод «3», или на какой либо усилитель ошибки. Кому интересно, можете сами проверить опытным путём. Притом, если управляющие сигналы будут сразу на всех управляющих выводах, управлять микросхемой (преобладать), будет сигнал с того управляющего вывода, амплитуда которого больше.
Ну что, давайте попробуем отключить вывод «13» от общего провода и подсоединить его к выводу «14», то есть переключить режим работы выходных ключей из однотактного в двухтактный. Посмотрим, что у нас получится.
Подстроечным резистором выводим опять напряжение на выводе «4» на ноль. Включаем питание. Что мы видим?
На выходе микросхемы так же присутствуют прямоугольные импульсы максимальной длительности, но их частота следования стала в два раза меньше частоты пилообразных импульсов.
Такие же самые импульсы будут и на втором ключевом транзисторе микросхемы (вывод 10), с той лишь разницей, что они будут сдвинуты по времени относительно этих на 180 градусов.
Здесь так же присутствует максимальный порог скважности (2%). Сейчас его не видно, нужно подключать 4-й луч осциллографа и совмещать вместе два выходных сигнала. Щупа четвёртого нет под рукой, поэтому этого не сделал. Кто хочет, проверьте практически сами, чтобы в этом удостовериться.
В таком режиме микросхема работает точно так же, как и в однотактном режиме, лишь с той разницей, что максимальная длительность выходных импульсов здесь не будет превышать 48% от общей длительности импульса.
Так что долго рассматривать этот режим мы не будем, а просто посмотрим, какие у нас будут импульсы при напряжении на выводе «4» в два вольта.
Поднимаем напряжение подстроечным резистором. Ширина выходных импульсов уменьшилась до 1/6 общей длительности импульса, то есть тоже ровно в два раза, чем в однотактном режиме работы выходных ключей (там в 1/3 раза).
На выводе второго транзистора (вывод 10) будут такие же импульсы, только сдвинутые по времени на 180 градусов.
Ну вот в принципе мы и разобрали работу ШИМ контроллера.
Ещё по выводу «4». Как говорилось раньше, этот вывод можно использовать для «мягкого» старта блока питания. Как это организовать?
Очень просто. Для этого подключаем к выводу «4» RC цепочку. Вот например фрагмент схемы:
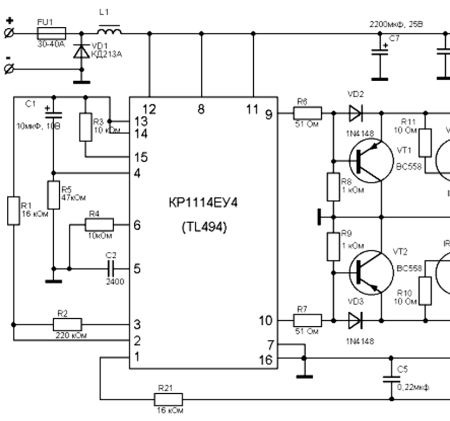
Как здесь работает «мягкий старт»? Смотрим схему. Конденсатор С1 через резистор R5 подключен к ИОН (+5 вольт).
При подаче питания на микросхему (вывод 12), на выводе 14 появляется +5 вольт. Начинает заряжаться конденсатор С1. Через резистор R5 протекает зарядный ток конденсатора, в момент включения он максимальный (конденсатор разряжен) и на резисторе возникает падение напряжения 5 вольт, которое подаётся на вывод «4». Это напряжение, как мы уже выяснили опытным путём, запрещает прохождение импульсов на выход микросхемы.
По мере заряда конденсатора, зарядный ток уменьшается и соответственно уменьшается и падение напряжения на резисторе. Напряжение на выводе «4» также уменьшается и на выходе микросхемы начинают появляться импульсы, длительность которых постепенно увеличивается (по мере заряда конденсатора). Когда конденсатор зарядится полностью — зарядный ток прекращается, напряжение на выводе «4» становится близко к нулю, и вывод «4» больше не оказывает влияния на длительность выходных импульсов. Блок питания выходит на свой рабочий режим.
Естественно Вы догадались, что время запуска БП (выхода его на рабочий режим) будет зависеть от величины резистора и конденсатора, и их подбором можно будет регулировать это время.
Ну вот, это кратко вся теория и практика, и ничего здесь особо сложного нет, и если Вы поймёте и разберётесь в работе этого ШИМ-а, то Вам не составит никакого труда разобраться и понять работу других ШИМ-ов.
Желаю всем удачи.
Форум РадиоКот :: Просмотр темы — Вопрос по усилителям ошибки в TL494.
Сегодня решил почитать еще раз даташит по TL494. Вот текст из даташита на русском.
«Выходы двух усилителей объединены диодным ИЛИ. Тот
усилитель, на выходе которого большее напряжение,
перехватывает управление логикой. При этом выходной сигнал
доступен не порознь, а только с выхода диодного ИЛИ (он же вход
компаратора ошибки). Таким образом, только один усилитель
может быть замкнут петлей ОС в линейном режиме. Этот
усилитель и замыкает главную, линейную ОС по выходному
напряжению. Второй усилитель при этом может использоваться как
компаратор — например, превышения выходного тока, или как ключ
на логический сигнал аварии (перегрев, КЗ и т.п.), дистанционного
выключения и пр. Один из входов компаратора привязывается к
ИОНу, на втором организуется логическое ИЛИ аварийных
сигналов (еще лучше — логическое И сигналов нормальных
состояний).»
Судя из текста, только один усилитель можно использовать для точной подстройки напряжения или тока, создавая ему из третьей ноги ООС. Во втором усилителе ООС не делают. Тем самым он становится компаратором и служит для резкого отключения например тока. т.е. держать ток не получиться на определенном уровне. Я прав? Или можно два использовать-это значит на втором также организуется ООС и все будет работать?
это значит на втором также организуется ООС и все будет работать?
Там перевод какой-то проблемный. Даже в оригинальном даташите показана возможность подключения ОС на оба усилителя:
Да и по структуре видно, что они совершенно идентичны:
Какой перехватит управление, тот и будет пользоваться своей ОС.
У людей — работает.
http://forum.cxem.net/index.php?showtop … try2069673
http://www.skoots.yolasite.com/19-power … harger.php
Усилители равноценны но работать будет только один. Как и блок питания может работать только в одном из режимов, стабилизация напряжения или стабилизация тока. Одновременно 2 режима невозможны.
ОС на усилителе будет работать та чей усилитель в данный момент активный.
Одновременно 2 режима невозможны.
Как я понял, автор это понимает. Тем более, выход то у обоих усилителей ошибки один.
Тогда пускай читает только третье предложение.
Спасибо. Теперь понятно. А почему в некоторых схемах в интернете с третьей ноги микросхемы не заведена ООС на усилители ошибки, ведь тогда они становятся компараторами?
Нет ОС получается через весь блок питания. Другое дало что она при этом жутко опаздывает и ОС начинает возбуждаться, появляются писки и жужжания в дросселе. В нормальных схемах обычно вводят частотно зависимую коррекцию местной ОС с выхода усилителя ошибки.
да, без местной ООС УО превращается в компаратор.
УО, охваченный местной ООС (RC цепь), превращается в регулятор.
когда применяется триггерная защита от перегрузки или кз, регулирование нам не не нужно, и корректирующая цепь на УО не ставится, так как срабатывание защиты однократное и после срабатывания защиты БП просто отключается.
когда нам нужно ограничивать (стабилизировать) ток, то второй УО (по току) обязательно корректируется собственной цепью, чтобы получился регулятор тока.
например, ограничивать (стабилизировать) ток нужно в «лабораторных» БП или зарядных устройствах.
У компаратора 2 выходных уровня 0 и 1, промежуточных состояний нет. Это не совсем подходит к данному случаю. Просто медленная общая ОС начинает возбуждаться на частоте где ОС превращается в положительную. На выходе усилителей обычно тогда несколько синусоид разной амплитудой.
Спасибо, теперь я все понял. Если я хочу сделать регулятор, то ставлю RC цепь на 3 ногу со 2 или 15 ногой, она не позволит усиливать высокочастотную составляющую из-за которой шим и скачет, также не забываю поставить резистор большего номинала параллельно с RC цепью, для постоянного тока, который заведет ООС по постоянному току, чтобы и по постоянному току усилители ошибки не превращались в компараторы.
Так,я выбрал резисторы для операционных усилителей для цепи ООС 1МОм для токового усилителя ошибки и 1МОм для регулятора напряжения. Резисторы на инвертирующем входе — для токового усилителя 20кОм(Ку=1Мом/20кОм=50). Для усилителя по напряжению 5кОм(Ку=1МОм/5кОм=200). Также шунтирую керамическими конденсаторами 0,2mkF 2-3 и 15-3 ногу микросхемы для не усиления пульсаций с частотой 50кГц, для их полного удаления с выходов операционников, по моим расчетам именно такие емкости. Для токового усилителя ошибки я думаю, что Ку=50 будет достаточной т.к. при увеличении тока на 0.1А даст нам увеличение напряжения на шунте 0.1Ом на 0,01В, значит-0.01*50=0,5В-для нашего PWM компаратора.
Здравствуйте. Очень хотелось бы подробней узнать про настройку оос на тл494. Я примерно понимаю что нужно настраивать ачх и фчх. Но не могу разложить все по полочкам. Большая просьба разясните на что влияет уменьшение или увеличение конденсатора и резистора в цепи между 2 и 3 ногой. Может это как-то можно рассчитать или методом перебора это все делается. Кому не сложно поделитесь знаниями. Заранее спасибо
Методом подбора.
Расчёт очень сложный, поскольку на это влияет очень много параметров, включая монтаж, и взаимное расположения элементов.
Хорошо метод подбора я понял. Ну а в процессе подбора на что обращать внимание? У Вас здесь у многих большой опыт в данной теме. Как мне узнать запаздывает ли стабилизация и пропускает ли частотные помехи.
У всех разная методика.
Я подбираю конденсатор (без резистора) что бы схема работала устойчиво во всём диапазоне напряжений и токов стремясь получить наименьшую ёмкость. Потом увеличиваю его в 2 раза и подбираю резистор стремясь получить максимальное сопротивление и сохранить устойчивость.
При использовании в лабораторном БП где широкий диапазон напряжений и токов и при неудачном расположении бывает необходима более сложная цепь коррекции.
С двумя RС цепочками и плюс маленький конденсатор без резистора.
Монтаж и взаимное расположение не должны быть выполнены с нарушениями известных правил. На этом их ощутимое влияние закончится раз и навсегда.
Что касается коррекции, то нужно научиться работать в симуляторе, только тогда получается осмысленное достижение нужного результата.
Если понадобятся модели, на Казусе в теме по LTspice есть библиотека Бордодынова А. П., за разъяснениями можно к нему обратиться.
На этом их ощутимое влияние закончится раз и навсегда.
то нужно научиться работать в симуляторе
В этом вопросе симулятор и железо совсем разная вещь.
В симулятор не загонишь полностью схему (а если и загонишь то без пользы потратишь много времени) и не учтёшь всех паразитных индуктивностей и ёмкостей.
У всех разная методика.
Я подбираю конденсатор (без резистора) что бы схема работала устойчиво во всём диапазоне напряжений и токов стремясь получить наименьшую ёмкость.
Можно поподробнее расписать вашу методику? Как проверяется устойчивость, какие действия выполняются, по шагам?
Спасибо.
Постепенно увеличиваю ёмкость. пока схема не станет работать устойчива, потом ставлю конденсатор в 2 раза больше и увеличиваю резистор пока схема сохраняет устойчивость. Что здесь не понятного.
Спасибо за советы. Будем пробовать.
стремясь получить наименьшую ёмкость….Постепенно увеличиваю ёмкость…потом ставлю конденсатор в 2 раза больше

1 Характеристики
- Готовый ШИМ — контроллер
- Незадействованные выводы для 200 мА приемника или источника тока
- Выбор однотактного или двухтактного режима работы
- Внутренняя схема запрещает двойной импульс на выходе
- Изменяемое время задержки обеспечивает контроль всего спектра
- Встроенный стабилизатор выдает 5 В опорного напряжения с допуском 5%
- Архитектура микросхемы позволяет легко синхронизироваться
2 Применение
- Настольные ПК
- Микроволновые печи
- Источники питания: AC/DC; изолированный; с коррекцией коэффициента мощности; >90 Вт
- Серверы БП
- Солнечные микро-преобразователи
- Стиральные машины классов : Low-End и High-End
- Электровелосипеды
- Источники питания: AC/DC; изолированный; без коррекции коэффициента мощности; <90 Вт
- Датчики дыма
- Преобразователи в солнечной энергетике
3 Описание
TL 494 включает в себя все функции необходимые для построения схемы управления широтно-импульсной модуляцией (ШИМ) на одном кристалле. Предназначенная в основном для управления питанием, она позволяет адаптировать схему к конкретному применению. TL 494 содержит два усилителя ошибки, внутренний регулируемый генератор, компаратор управления длительностью мертвого времени (DTC), импульсно управляемый переключатель, источник опорного напряжения 5В ± 5%, контроль выходной цепи.
Усилители ошибки выдают синфазное напряжение в диапазоне -0.3 В до Vcc — 2 В. Компаратор мертвого времени имеет фиксированное смещение, что дает 5% временную задержку. Внутренний генератор можно обойти путем отключения вывода RT и подключения пилообразного напряжения к CT, что применяется для общих цепей в синхронизации источников питания.
Независимые выходные формирователи на транзисторах дают возможность подключать нагрузку по схеме с общим эмиттером либо по схеме эмиттерного повторителя. Выходной каскад микросхем TL493/4/5 работает в однотактном или двухтактном режиме с возможностью выбора режима с помощью специального входа. TL494 может работать в однотактном и двухтактном режиме. Архитектура устройства не дает возможности подачи двойного импульса в двухтактном режиме.
TL494C может работать в диапазоне температур от 0°C до 70°C. TL494I работает в диапазоне температур от –40°C до 85°C.
| Серийный номер | Корпус(кол-во выводов) | Размеры |
| TL 494 | SOIC (16) | 9.90 мм × 3.91 мм |
| PDIP (16) | 19.30 мм × 6.35 мм | |
| SOP (16) | 10.30 мм × 5.30 мм | |
| TSSOP (16) | 5.00 мм × 4.40 мм |
4 Расположение и назначение выводов
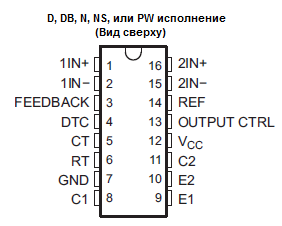 Цоколевка TL494
Цоколевка TL494
| Вывод | Тип | Описание | |
| Название | Номер | ||
| 1IN+ | 1 | I | Неинвертирующий вход усилителя ошибки 1 |
| 1IN- | 2 | I | Инвертирующий вход усилителя ошибки 1 |
| 2IN+ | 16 | I | Неинвертирующий вход усилителя ошибки 2 |
| 2IN- | 15 | I | Инвертирующий вход усилителя ошибки 2 |
| C1 | 8 | O | Коллектор Биполярного Плоскостного Транзистора (БПТ) 1 |
| C2 | 11 | O | Коллектор БПТ 2 |
| CT | 5 | — | Вывод для подключения конденсатора для установки частоты генератора |
| DTC | 4 | I | Вход компаратора мертвого времени |
| E1 | 9 | O | Эмиттер БПТ 1 |
| E2 | 10 | O | Эмиттер БПТ 2 |
| FEEDBACK | 3 | I | Вывод для обратной связи |
| GND | 7 | — | Общий |
| OUTPUT CTRL | 13 | I | Выбор режима работы |
| REF | 14 | O | Опорное напряжение 5В |
| RT | 6 | — | Вывод для подключения резистора для установки частоты генератора |
| VCC | 12 | — | Напряжение питания (+) |
5 Спецификация
5.1 Абсолютные максимальные значения
| Мин. | Макс. | Ед. Изм. | |
| VCC Напряжение питания | 41 | В | |
| VI Напряжение на входе усилителя | VCC + 0.3 | В | |
| VO Напряжение на коллекторе | 41 | В | |
| IO Ток коллектора | 250 | мА | |
| Температура припоя 1,6 мм в течении 10 сек. | 260 | °C | |
| Tstg Температура хранения | –65 | 150 | °C |
5.2 Значения электростатического заряда
| Макс. | Ед. изм. | ||
| V(ESD) Электростатический заряд | Модель человеческого тела (HBM), посредством ANSI/ESDA/JEDEC JS-001, все выводы | 500 | В |
| Модель заряда на устройстве (CDM), посредством JEDEC спецификации JESD22-C101, все выводы | 200 | В |
5.3 Рекомендуемые рабочие значения
| Мин. | Макс. | Ед. Изм. | |
| VCC Напряжение питания | 7 | 40 | В |
| VI Напряжение на входе усилителя | -0,3 | VCC – 2 | В |
| VO Напряжение на коллекторе | 40 | В | |
| Ток коллектора (каждого транзистора) | 200 | мА | |
| Ток обратной связи | 0,3 | мА | |
| fOSC Частота генератора | 1 | 300 | кГц |
| CT Емкость конденсатора генератора | 0,47 | 10000 | нФ |
| RT Сопротивление резистора генератора | 1,8 | 500 | кОм |
| TA Рабочая температура на открытом воздухе | 0 | 70 | °C |
| -40 | 85 | °C |
5.4 Тепловые характеристики
В рабочем диапазоне температур на открытом воздухе
| Параметр | TL494 | Ед. изм. | ||||
| D | DB | N | NS | PW | ||
| RθJA Полное тепловое сопротивление для корпуса | 73 | 82 | 67 | 64 | 108 | °C/Вт |
5.5 Электрические характеристики
В рабочем диапазоне температур на открытом воздухе, VCC = 15 В, f = 10 кГц
| Параметр | Условия испытаний (1) | TL494C, TL494I | Ед. изм | ||
| Мин. | Тип. (2) | Макс. | |||
| Выходное напряжение (REF) | IO = 1 мА | 4.75 | 5 | 5.25 | В |
| Стабилизация на входе | VCC от 7 В до 40 V | 2 | 25 | мВ | |
| Стабилизация на выходе | IO от 1 мА до 10 мА | 1 | 15 | мВ | |
| Изменение выходного напряжения при температуре | ΔTA от MIN до MAX | 2 | 10 | мВ/В | |
| Выходной ток короткого замыкания (3) | REF = 0 V | 25 | мА |
(1) Для условий указанных как MIN или MAX используются соответствующие значения, указанные в рекомендуемых условиях эксплуатации.
(2) Все типичные значения , за исключением изменения параметров температуры , установлены при TA = 25 ° C.
(3) Продолжительность короткого замыкания не должна превышать одну секунду.
5.6 Электрические характеристики генератора
| Параметр | Условия испытаний (1) | TL494C, TL494I | Ед. изм. |
| Мин. | Тип. (2) | Макс. | |
| Частота | 10 | кГц | |
| Стандартное отклонение частоты (3) | Все значения VCC, CT, RT, и TA постоянны | 100 | Гц/кГц |
| Изменение частоты от напряжения | VCC от 7 В до 40 В, TA = 25°C | 1 | Гц/кГц |
| Изменение частоты от температуры (4) | ΔTA — от MIN до MAX | 10 | Гц/кГц |
(1) Для условий указанных как MIN или MAX используются соответствующие значения, указанные в рекомендуемых условиях эксплуатации.
(2) Все типичные значения , за исключением изменения параметров температуры , установлены при TA = 25 ° C.
(3) Стандартное отклонение является мерой статистического распределения относительно среднего рассчитанного по формуле:
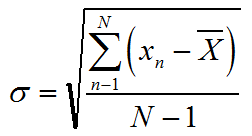
(4) Температурный коэффициент конденсатора и резистора не учитываются.
5.7 Электрические характеристики усилителя ошибки
| Параметр | Условия испытаний | TL494C, TL494I | Ед. изм. | |
| Мин. | Тип. (1) | Макс. | ||
| Входное напряжение смещения | VO (FEEDBACK) = 2.5 В | 2 | 10 | мВ |
| Входной ток смещения | VO (FEEDBACK) = 2.5 В | 25 | 250 | нА |
| Входной ток смещения | VO (FEEDBACK) = 2.5 В | 0.2 | 1 | мкА |
| Диапазон входного напряжения | VCC от 7 В до 40 В | -0.3 до VCC – 2 | В | |
| Коэффициент усиления разомкнутой цепи | ΔVO = 3 В, VO = 0.5 В — 3.5 В, RL = 2 кОм | 70 | 95 | dB |
| Полоса пропускания | ΔVO = 3 В, VO = 0.5 В — 3.5 В, RL = 2 кОм | 800 | кГц | |
| Коэффициент подавления синфазных сигналов | ΔVO = 40 В, TA = 25°C | 65 | 80 | dB |
| Выходной ток приемника(FEEDBACK) | VID = –15 мВ до –5 В, V (FEEDBACK) = 0.7 В | 0.3 | 0.7 | мА |
| Выходной ток источника(FEEDBACK) | VID = 15 мВ до 5 В, V (FEEDBACK) = 3.5 В | -2 | мА |
(1) Все типичные значения , за исключением изменения параметров температуры , установлены при TA = 25 ° C.
5.8 Выходные электрические характеристики
| Параметр | Условия испытаний | Мин. | Тип. (1) | Макс. | Ед. изм. |
| Ток коллектора в закрытом состоянии | VCE = 40 В, VCC = 40 В | 2 | 100 | мкА | |
| Ток эмиттера в закрытом состоянии | VCC = VC = 40 В, VE = 0 | -100 | мкА | ||
| Напряжение насыщения коллектор — эмиттер | Общий эмиттер | VE = 0, IC = 200 мА | 1.1 | 1.3 | В |
| Эмиттерный повторитель | VO(C1 или C2) = 15 В, IE = –200 мА | 1.5 | 2.5 | ||
| Выходной контроль входного тока | VI = Vref | 3.5 | мА |
(1) Все типичные значения , за исключением изменения параметров температуры , установлены при TA = 25 ° C.
5.9 Электрические характеристики управления длительностью мертвого времени
| Параметр | Условия испытаний | Мин. | Тип. (1) | Макс. | Ед. изм. |
| Входной ток смещения (DEAD-TIME CTRL) | VI от 0 до 5.25 В | -2 | -10 | мкА | |
| Максимальная скважность импульсов на каждом выходе | VI (DEAD-TIME CTRL) = 0, CT = 0.01 мкФ, RT = 12 кОм | 45% | — | ||
| Входное пороговое напряжение (DEAD-TIME CTRL) | Нулевой коэффициент заполнения | 3 | 3.3 | В | |
| Максимальный коэффициент заполнения | 0 |
(1) Все типичные значения , за исключением изменения параметров температуры , установлены при TA = 25 ° C.
5.10 Электрические характеристики ШИМ — компаратора
| Параметр | Условия испытаний | Мин. | Тип. (1) | Макс. | Ед. изм. |
| Входное пороговое напряжение (FEEDBACK) | Нулевой коэффициент заполнения | 4 | 4.5 | В | |
| Входной ток приемника (FEEDBACK) | V (FEEDBACK) = 0.7 В | 0.3 | 0.7 | мА |
(1) Все типичные значения , за исключением изменения параметров температуры , установлены при TA = 25 ° C.
5.11 Общие электрические характеристики устройства
| Параметр | Условия испытаний | Мин. | Тип. (1) | Макс. | Ед. изм. |
| Ток потребляемый в режиме ожидания | RT = Vref, Все остальные входы и выходы отключены | VCC = 15 В | 6 | 9 | мА |
| VCC = 40 В | 10 | 15 | |||
| Средний потребляемый ток | VI (DEAD-TIME CTRL) = 2 В, | 7.5 | мА |
(1) Все типичные значения , за исключением изменения параметров температуры , установлены при TA = 25 ° C.
5.12 Коммутационные характеристики
| Параметр | Условия испытаний | Мин. | Тип. (1) | Макс. | Ед. изм. |
| Время нарастания | Схема с общим эмиттером | 100 | 200 | нс | |
| Время спада | 25 | 100 | нс | ||
| Время нарастания | Схема эмиттерного повторителя | 100 | 200 | нс | |
| Время спада | 40 | 100 | нс |
(1) Все типичные значения , за исключением изменения параметров температуры , установлены при TA = 25 ° C.
5.13 Типовые характеристики
Рис. 1 Частота колебаний генератора и ее отклонение от сопротивления резистора генератора
Рис. 2 Усиление напряжения от частоты
Рис. 3 Усилитель ошибки — передаточные характеристики
Рис. 4 Усилитель ошибки — график Боде
6 Измеряемые параметры
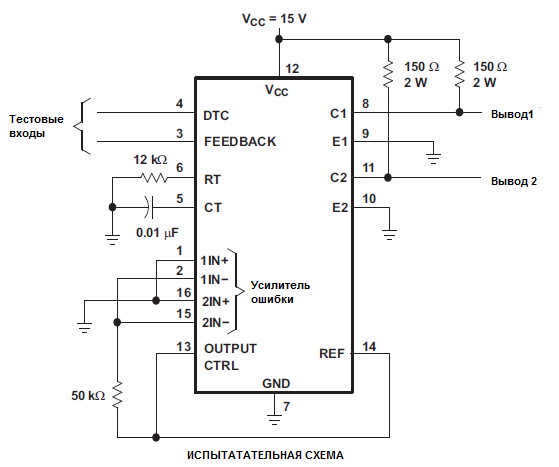
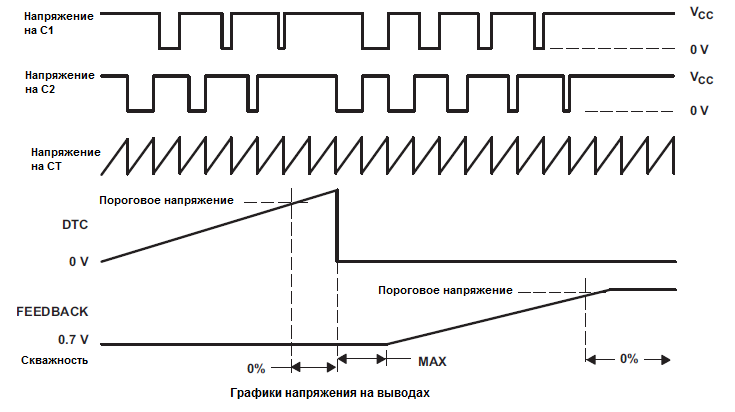
Рис. 5 Проверка работы цепи и осциллограммы
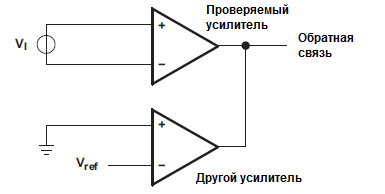
Рис. 6 Характеристики усилителя
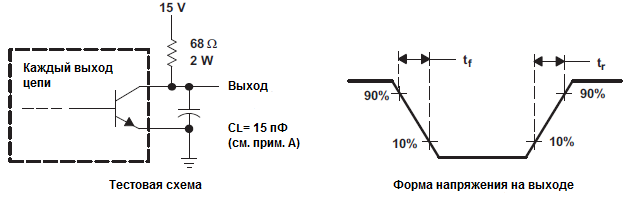
Прим. А: CL включает датчик и управляющую емкость
Рис. 7 Схема включения с общим эмиттером
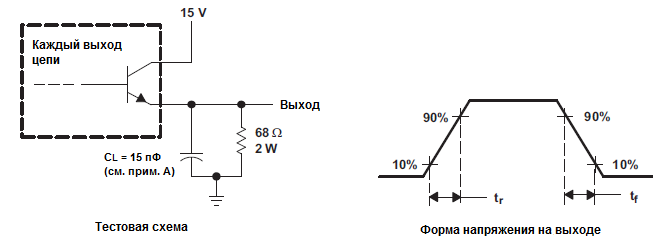
Прим. А: CL включает датчик и управляющую емкость
Рис. 8 Схема включения эмиттерного повторителя
Описание работы
Обзор
TL494 не только включает в себя основные блоки, необходимые для управления импульсным источником питания, но также решает многие основные проблемы и уменьшает количество дополнительных схем, требуемых при проектировании устройства. TL494 — это схема управления с фиксированной частотой и широтно-импульсной модуляцией (ШИМ). Модуляция выходных импульсов осуществляется путем сравнения пилообразного сигнала, создаваемого внутренним генератором на синхронизирующем конденсаторе (CT), с любым из двух управляющих сигналов. Выходной каскад включается в то время, когда пилообразное напряжение больше сигналов управления напряжением. По мере увеличения управляющего сигнала время, в течение которого пилообразный вход больше, уменьшается; следовательно, длительность выходного импульса уменьшается. D-триггер управления импульсом поочередно направляет модулированный импульс на каждый из двух выходных транзисторов. Для получения дополнительной информации о работе TL494 см. Примечания по применению, расположенные на ti.com.
Функциональная блок-схема
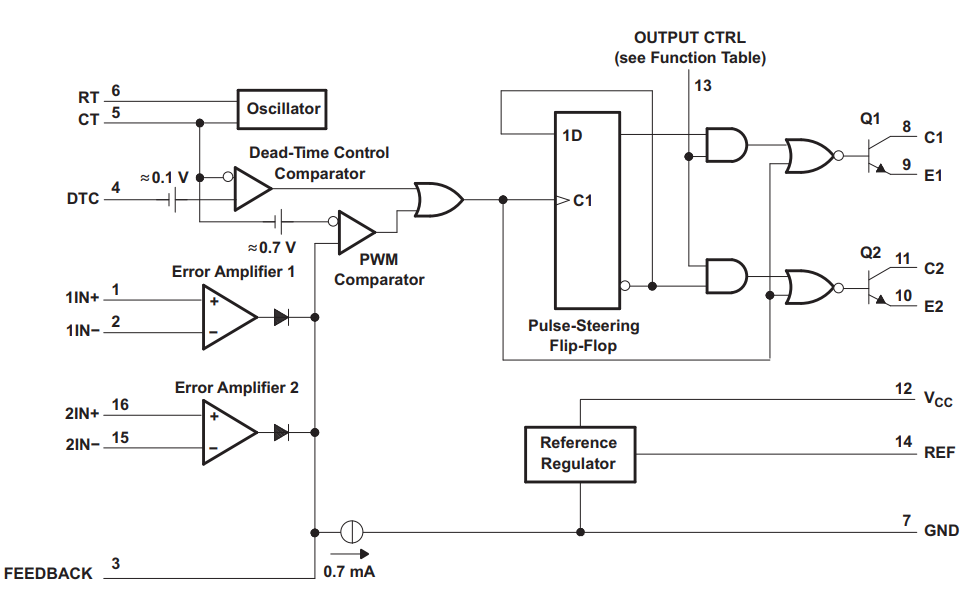
Блок-схема tl494
Источник опорного напряжения
TL494 имеет внутренний источник опорного напряжения 5 В на выводе REF. Помимо получения опорного напряжения он дает питание логике управления, D-триггеру, генератору, компаратору мертвого времени, компаратору ШИМ. В стабилизаторе используется схема с плавно изменяющейся запрещенной зоной в качестве основного эталона для поддержания тепловой стабильности на уровне менее 100 мВ в рабочем диапазоне температур воздуха от 0 ° C до 70 ° C. Защита от короткого замыкания нужна, чтобы защитить источник опорного напряжения; для дополнительных цепей смещения доступен ток нагрузки 10 мА. Значение внутренне запрограммировано на начальную точность ± 5% и поддерживает стабильность изменения менее 25 мВ в диапазоне входного напряжения от 7 В до 40 В. Для входных напряжений менее 7 В стабилизатор насыщается в пределах 1 В на входе и отслеживает его.
Генератор
Генератор обеспечивает положительную пилообразную форму волны компараторам мертвого времени и ШИМ для сравнения с различными управляющими сигналами.
Частота сигнала выдаваемого генератором задается значениями сопротивления и емкости компонентов RT и СТ. Генератор заряжает конденсатор СТ постоянным током, величина которого задается сопротивлением резистора RT. Когда напряжение на конденсаторе СТ достигнет 3 В, схема генератора разряжает его, и цикл зарядки возобновляется. Зарядный ток определяется по формуле:
Период пилообразного сигнала можно рассчитать по формуле :
Частота сигнала от генератора:
В двухтактном режиме частота на выходе будет равняться половине частоты генератора.
Управление временем задержки (мертвым временем)
Вход управления мертвым временем задает минимальное мертвое время (время отключения). Выход компаратора запрещает переключение транзисторов Q1 и Q2, когда напряжение на входе больше, чем линейное напряжение генератора. Внутреннее смещение 110 мВ обеспечивает минимальное мертвое время
3%, когда вывод DTC подключен к земле. При подаче напряжения на вывод DTC длительность мертвого времени увеличивается. Это дает возможность линейно изменять длительность мертвого времени от минимума 3% до 100% при изменении входного напряжения от 0 В до 3,3 В соответственно. Благодаря полнодиапазонному управлению выходом можно управлять от внешних источников без нарушения работы усилителей ошибок. Вход управления мертвым временем DTC является входом с относительно высоким импедансом (II < 10 мкА) и должен использоваться там, где требуется дополнительное управление коэффициентом заполнения. Для правильного управления этот вывод должен быть подключен для управления либо подтянут к плюсу питания либо к земле. Обрыв цепи в таком случае даст неопределенное состояние.
Компаратор
Компаратор имеет смещение относительно источника опорного напряжения. Это обеспечивает изоляцию от входного источника питания для повышения стабильности. Вход компаратора не имеет гистерезиса, поэтому должна быть предусмотрена защита от ложного срабатывания вблизи порога переключения. Компаратор имеет время отклика 400 нс от любого из входов управляющего сигнала к выходным транзисторам с перегрузкой всего 100 мВ. Это обеспечивает положительный контроль выхода в пределах половины цикла для работы в рекомендованном диапазоне 300 кГц.
Широтно-импульсная модуляция ШИМ
Компаратор также управляет шириной выходного импульса. Для этого линейно нарастающее напряжения на синхронизирующем конденсаторе CT сравнивается с управляющим сигналом, присутствующим на выходе усилителей ошибки. Вход CT подключается через последовательный диод, который отсутствует на входе управляющего сигнала. Для этого требуется, чтобы управляющий сигнал (выход усилителя ошибки) был на
0,7 В больше, чем напряжение на выводе CT, чтобы подавить выходную логику, и обеспечить работу с максимальным коэффициентом заполнения, не требуя понижения управляющего напряжения до истинного потенциала земли. Ширина выходного импульса изменяется от 97% периода до 0, так как напряжение на выходе усилителя ошибки изменяется от 0,5 В до 3,5 В соответственно.
Усилители ошибки
Оба усилителя ошибки с высоким коэффициентом усиления получают напряжение смещения от шины питания VI. Это позволяет использовать синфазное входное напряжение в диапазоне от –0,3 В до 2 В ниже VI. Оба усилителя ведут себя как несимметричные усилители с однополярным питанием, поскольку каждый выход активен только на высоком уровне. Это позволяет каждому усилителю работать независимо при уменьшении требуемой ширины выходного импульса. Когда оба выхода соединены по логике ИЛИ на инвертирующем входе компаратора ШИМ, доминирует усилитель, требующий минимального выходного импульса. Выходы усилителя подтянуты к низкому уровню генератором тока, чтобы обеспечить максимальную ширину импульса, когда оба усилителя отключены.
Управление выходом (OUTPUT CTRL)
Вывод OUTPUT CTRL определяет, работают ли выходные транзисторы параллельно или в в двухтактном режиме. Этот вход является источником питания для D-триггера. Вывод OUTPUT CTRL является асинхронным и управляет напрямую выходом, независимо от генератора или D-триггера. Входные условия должны быть четко зафиксированы, определяемым применением. Для параллельной работы выходных транзисторов OUTPUT CTRL должен быть заземлен. При этом отключается D-триггер и его выходы. В этом режиме импульсы, наблюдаемые на выходе компаратора мертвого времени / ШИМ, передаются обоими выходными транзисторами параллельно. Для двухтактного режима вывод OUTPUT CTRL должен быть соединен с источником опорного напряжения 5 В. В этом состоянии каждый из выходных транзисторов поочередно активируется D-триггером.
Выходные транзисторы
В TL494 имеются два выходных транзистора. Оба транзистора сконфигурированы как открытый коллектор / открытый эмиттер, и каждый может потреблять или потреблять до 200 мА. Транзисторы имеют напряжение насыщения менее 1,3 В в конфигурации с общим эмиттером и менее 2,5 В в конфигурации эмиттерного повторителя. Выходы защищены от перегрузки, чтобы предотвратить выход из строя, но не имеют достаточного ограничения тока, чтобы позволить им работать как выходы источника тока.
Функциональные режимы устройства
Когда вывод OUTPUT CTRL подключен к земле, TL494 работает в однотактном или параллельном режиме. Когда вывод OUTPUT CTRL подтянут к VREF, TL494 работает в обычном двухтактном режиме.
Применение
В следующем примере TL494 используется для создания источника питания 5 В / 10 А. Эта схема была взята из примечания к приложению SLVA001.
- VI = 32 В
- VO = 5 В
- IO = 10 A
- fOSC = 20 кГц частота генератора
- VR = 20 мВ размах напряжения (VRIPPLE)
- ΔIL = 1.5 A изменение тока индуктивности
Этапы проектирования подробно
Источник питания
В источнике постоянного тока 32 В для этого блока питания используется трансформатор с входным напряжением на 120 В и выходным на 24 В номинальной мощностью 75 ВА. Вторичная обмотка 24 В питает двухполупериодный мостовой выпрямитель, за которым следует токоограничивающий резистор (0,3 Ом) и два фильтрующих конденсатора (см. Рисунок 10).
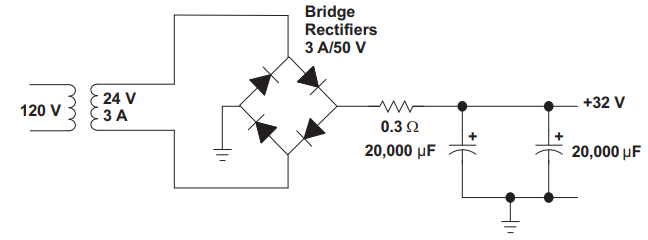
Рисунок 10. Источник питания
Выходной ток определяется по формулам 6 и 7:
VRECTIFIER = VSECONDARY × √2 = 24 В × √2 = 34 В (6)
Двухполупериодный мостовой выпрямитель 3 A / 50 В удовлетворяет этим расчетным условиям. На Рисунке 9 показаны секции переключения и управления.
Цепи управления
Генератор
Подключение внешнего конденсатора и резистора к выводам 5 и 6 задает частоту генератора TL494. Генератор настроен на работу на частоте 20 кГц с использованием значений компонентов, рассчитанных по формулам 8 и 9:
Выберем CT = 0,001 мкФ и рассчитаем RT:
Усилитель ошибки
Усилитель ошибки сравнивает сигнала с эталоном от источника опорного напряжения 5В и регулирует ШИМ для поддержания постоянного выходного тока (см. Рисунок 11).
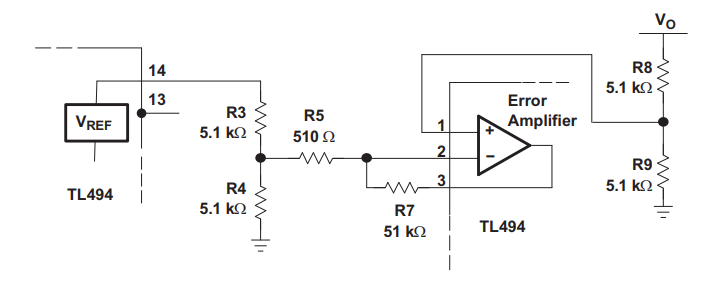 Рисунок. 11 Подключение усилителя ошибки
Рисунок. 11 Подключение усилителя ошибки
Напряжение в 2,5 В формируется делителем на резисторах R3 и R4 от источника опорного напряжения VREF = 5 В. Сигнал ошибки выходного напряжения в 2,5 В также формируется делителем на резисторах R8 и R9. Если выходной сигнал должен быть установлен точно на уровне 5,0 В, для регулировки можно использовать потенциометр 10 кОм вместо резистора R8.
Чтобы повысить стабильность схемы усилителя ошибки, выходной сигнал усилителя ошибки подается обратно на инвертирующий вход через через резистор R7, уменьшая коэффициент усиления до 101.
Токоограничивающий усилитель
Источник питания был рассчитан на ток нагрузки 10 А и реактивный ток IL 1,5 А, поэтому ток короткого замыкания должен быть:
Схема ограничения тока показана на Рисунке 12.
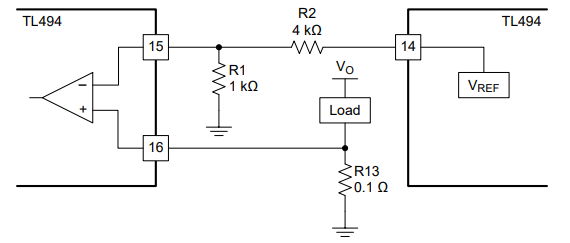 Рисунок 12. Схема ограничения тока
Рисунок 12. Схема ограничения тока
Резисторы R1 и R2 задают опорное напряжение приблизительно 1 В на инвертирующем входе усилителя ограничения тока. Резистор R13, включенный последовательно с нагрузкой, подает 1 В на неинвертирующий вход токоограничивающего усилителя, когда ток нагрузки достигает 10 А. Ширина выходного импульса соответственно уменьшается. Значение R13 рассчитывается по формуле 11.
R13 = 1В / 10А = 0,1 Ом (11)
Плавный пуск и мертвое время
Чтобы снизить нагрузку на переключающие транзисторы во время запуска, необходимо уменьшить пусковой выброс, возникающий при заряде конденсатора выходного фильтра. Наличие управления мертвым временем делает реализацию схемы плавного пуска относительно простой (см. Рисунок 13).
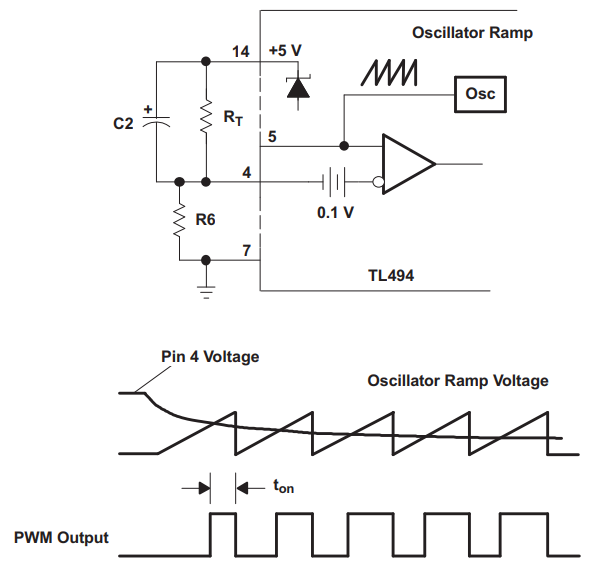
Рисунок 13. Схема плавного пуска
Схема плавного пуска позволяет медленно увеличивать ширину импульса на выходе (см. Рисунок 13), подавая сигнал с отрицательной крутизной на вход DTC (вывод 4).
В момент включения конденсатор C2 имеет минимальное сопротивление поэтому подтягивает вход DTC к источнику опорного напряжения 5 В, который отключает выходы (100% мертвое время). По мере того как конденсатор заряжается через R6, ширина выходного импульса медленно увеличивается, пока контур управления не примет команду. При соотношении резисторов 1:10 для R6 и R7 напряжение на выводе 4 после запуска составляет 0,1 × 5 В,
или 0,5 В.
Время плавного пуска обычно находится в диапазоне от 25 до 100 тактов. Если выбрано 50 тактов при частоте переключения 20 кГц, время плавного пуска будет:
t = 1/f = 1 / 20 кГц = 50 мкс на такт (12)
С2 = (время плавного пуска) / R6 = (50 мкс × 50 тактов) / 1 кОм = 2,5 мкФ (13)
Это помогает устранить любые ложные сигналы, которые могут создаваться схемой управления при подаче питания.
Расчет индуктивности
Используемая схема подключения показана на рисунке 14.

Рисунок 14. Схема переключения
Необходимое значение индуктивности L рассчитывается по формулам:
d = коэффициент заполнения = VO/VI = 5 В/32 В = 0.156
f = 20 кГц (цель проектирования)
ton = время включения (S1 замкнут) = (1/f) × d = 7.8 мкс
toff = время выключения (S1 разомкнут) = (1/f) – ton = 42.2 мкс
L ≈ (VI – VO ) × ton/ΔIL ≈ [(32 В – 5 В) × 7.8 мкс ]/1.5 A ≈ 140.4 мкГн
Расчет выходной емкости
После расчета индуктивности фильтра рассчитывается емкость конденсатора выходного фильтра для удовлетворения требований к пульсациям на выходе. Электролитический конденсатор можно смоделировать как последовательно соединенные индуктивность, сопротивление и емкость. Чтобы обеспечить хорошую фильтрацию, частота пульсаций должна быть намного ниже частот, при которых последовательно подключенная индуктивность становится значимой. Итак, два интересующих компонента — это емкость и эквивалентное последовательное сопротивление (ESR). Максимальное значение ESR рассчитывается в соответствии с соотношением между заданным размахом пульсаций напряжения и размахом пульсаций тока.
ESR(max) = ΔVO(ripple) / ΔIL = 0.1 В / 1.5 A ≈ 0.067 Ом (14)
Минимальная емкость C3, необходимая для поддержания пульсаций напряжения VO на уровне менее 100 мВ, рассчитывается в соответствии с уравнением 15:
C3 = ΔIL / 8fΔVO = 1.5 А / (8 × 20 × 103 × 0.1 В) = 94 мкФ (15)
Выбран конденсатор на 220 мФ, 60 В, потому что он имеет максимальное значение ESR 0,074 Ом и максимальный ток пульсаций 2,8 А.
Расчет мощности для транзисторного ключа
Мощный транзисторный ключ был построен с применением в качестве управляющего транзистора NTE153 pnp и выходного транзистора npn NTE331. Они образуют собой составной транзистор Дарлингтона (см. Рисунок 15).
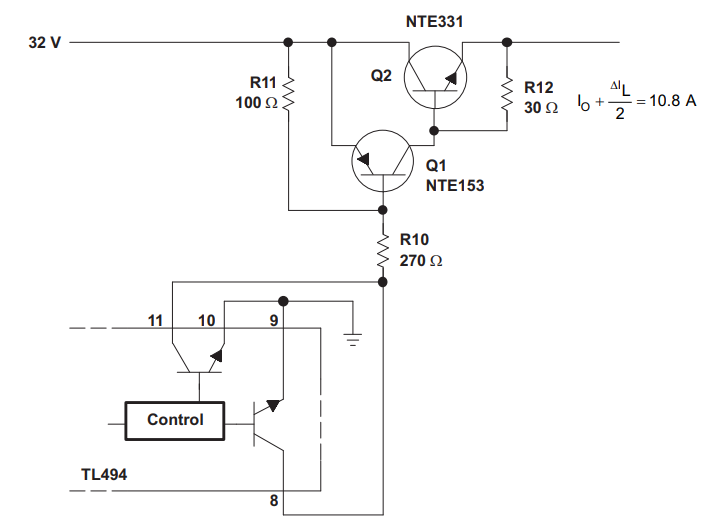
Рисунок 15. Мощный выходной ключ
hFE (Q1) при I от 3 A = 15 (16)
hFE (Q2) при I от 10 A = 5 (16)
 |
(18) |
Значение R10 рассчитывается по формуле:
 |
(19) |
На основании этих расчетов для R10 было выбрано ближайшее стандартное сопротивление резистора 220 Ом. Резисторы R11 и R12 позволяют разрядить носители зарядов в ключах транзисторах, когда они выключены.
Описанный источник питания демонстрирует гибкость схемы управления ШИМ на TL494. Эта конструкция блока питания демонстрирует многие методы управления блоком питания, обеспечиваемые TL494, а также универсальность схемы управления.
График выходных характеристик
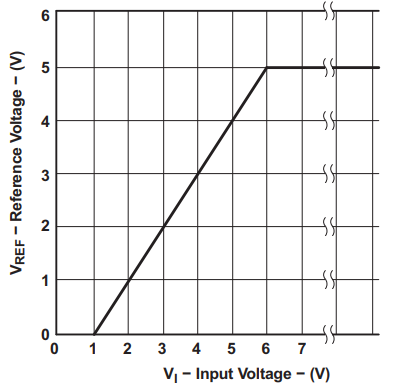
Рисунок 16. Опорное напряжение от входного напряжения
Рекомендации по источнику питания
TL494 спроектирован для работы от питающего напряжения в диапазоне от 7 В до 40 В. Это напряжение должно хорошо стабилизироваться. Если источник питания расположен на расстоянии более нескольких дюймов от устройства, может потребоваться дополнительный конденсатор большой емкости в дополнение к керамическим байпасным конденсаторам. Танталовый конденсатор емкостью 47 мкФ будет в этом случае типовым решением, однако он может варьироваться в зависимости от выдаваемой выходной мощности.
Печатная плата
Рекомендации по проектированию печатной платы
Всегда старайтесь использовать индуктивность с низким уровнем электромагнитных помех с ферритовым сердечником закрытого типа. Такими примерами могут быть индуктивности с тороидальным сердечником и сердечником типа E. Открытые сердечники могут использоваться, если они имеют низкие характеристики электромагнитных помех и расположены немного дальше от трасс и компонентов с низким энергопотреблением. Также старайтесь расположить полюса перпендикулярно печатной плате, если используете открытый сердечник. Цилиндрические сердечники обычно издают самый нежелательный шум.
Обратная связь
Постарайтесь проложить трассу обратной связи как можно дальше от катушки индуктивности и зашумленных цепей питания. Старайтесь, чтобы трасса обратной связи была как можно более прямой и широкой. Эти два требования иногда требуют компромисса, но требование держаться подальше от электромагнитных помех катушки индуктивности и других источников шума является более важным из них. Прокладывайте трассу обратной связи на стороне печатной платы, противоположной катушке индуктивности, с земляным полигоном разделяющим их.
Входные / выходные конденсаторы
При использовании небольшого керамического конденсатора для входного фильтра его следует располагать как можно ближе к выводу VCC микросхемы. Это устранит как можно больше эффектов индуктивности дорожек и обеспечит более чистое напряжение питания внутренней шины микросхемы. Некоторые проекты требуют использования проходного конденсатора, подключенного от выхода к выводу «feedback», как правило, из-за требований к стабильности. В этом случае его также следует расположить как можно ближе к микросхеме. Использование конденсаторов для поверхностного монтажа также уменьшает длину проводов и снижает вероятность попадания шума в действующую антенну, создаваемую выводными компонентами.
Компоненты сглаживающего фильтра
Компоненты сглаживающего фильтра для стабильности также следует размещать рядом с микросхемой. Компоненты для поверхностного монтажа здесь также предпочтительнее по тем же причинам, что и конденсаторы фильтра. Они также не должны располагаться очень близко к катушке индуктивности.
Трассы и земляные полигоны
Сделайте все силовые (сильноточные) трассы как можно более короткими, прямыми и толстыми. На стандартной печатной плате хорошей практикой является создание дорожек с абсолютным минимумом 15 мил (0,381 мм) на ампер. Катушка индуктивности, выходные конденсаторы и выходной диод должны располагаться как можно ближе друг к другу. Это помогает уменьшить электромагнитные помехи, излучаемые цепями питания из-за высоких коммутируемых токов через них. Это также снизит индуктивность и сопротивление выводов, что, в свою очередь, уменьшит всплески шума, звон и резистивные потери, которые вызывают ошибки напряжения. Заземление микросхемы, входные конденсаторы, выходные конденсаторы и выходной диод (если он есть) должны быть подключены как можно ближе друг к другу и непосредственно к шине земли. Также было бы неплохо иметь слой земли с обеих сторон печатной платы. Это также снизит шум за счет уменьшения ошибок контура заземления, а также за счет поглощения большего количества электромагнитных помех, излучаемых катушкой индуктивности. Для многослойных плат с более чем двумя слоями земляной слой может использоваться для разделения слоя питания (где находятся трассы питания и компоненты) и сигнального слоя (где располагаются обратная связь, фильтр и компоненты) для повышения производительности. На многослойных платах потребуется использование переходных отверстий для соединения дорожек и различных слоев. Хорошей практикой является использование одного стандартного перехода на 200 мА тока, если трассе потребуется провести значительный ток от одного слоя к другому. Расположите компоненты так, чтобы петли тока переключения изгибались в одном направлении. В зависимости от способа работы импульсных регуляторов существует два состояния питания. Одно состояние, когда переключатель включен, и одно состояние, когда переключатель выключен. Во время каждого состояния будет токовая петля, созданная силовыми компонентами, которые в это время проводят ток. Расположите силовые компоненты так, чтобы во время каждого из двух состояний токовая петля имелась в одном направлении. Это предотвращает инверсию магнитного поля, полученную от трасс между двумя полупериодами и
снижает излучаемые электромагнитные помехи.
Пример трассировки печатной платы
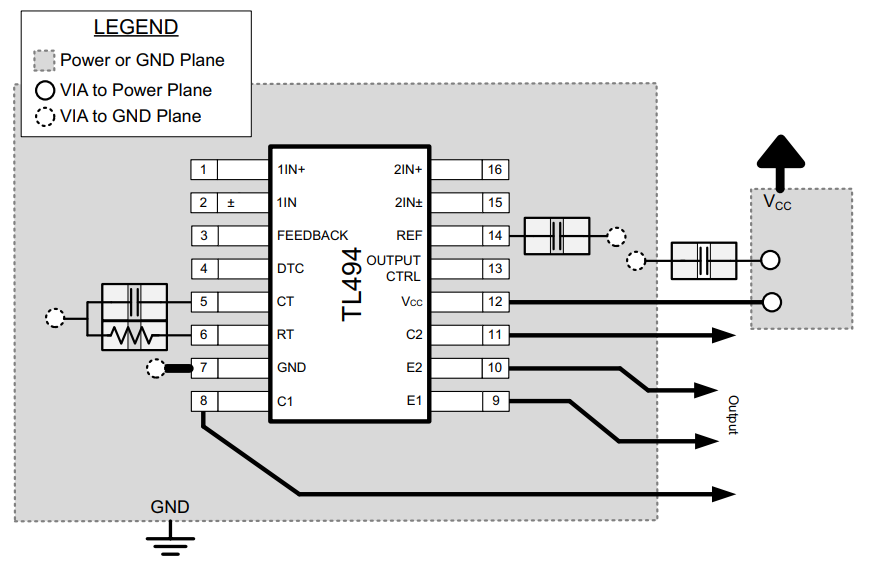 Рисунок 17. Пример печатной платы при использовании ОУ по неинвертирующей схеме
Рисунок 17. Пример печатной платы при использовании ОУ по неинвертирующей схеме  Купить TL494 на Алиэкспресс
Купить TL494 на Алиэкспресс
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
TL 494 и ее последующие версии — наиболее часто применяемая микросхема для построения двухтаткных преобразователей питания.
- TL494 (оригинальная разработка Texas Instruments) — ИС ШИМ преобразователя напряжения с однотактными выходами (TL 494 IN — корпус DIP16, -25..85С, TL 494 CN — DIP16, 0..70C).
- К1006ЕУ4 — отечественный аналог TL494
- TL594 — аналог TL494 c улучшенной точностью усилителей ошибки и компаратора
- TL598 — аналог TL594 c двухтактным (pnp-npn) повторителем на выходе
Настоящий материал — обобщение на тему оригинального техдока Texas Instruments (ищите документ slva001a.pdf на www.ti.com — далее ссылка «TI»), публикаций International Rectifier («Силовые полупроводниковые приборы International Rectifier», Воронеж, 1999) и Motorola, опыта друзей-самодельщиков и самого автора. Следует сразу отметить, что точностные параметры, коэффициент усиления, токи смещения и прочие аналоговые показатели улучшались от ранних серий к более поздним, в тексте — как правило — используются наихудшие, ранних серий параметры. Вкратце, у почтеннейшей микросхемы есть и недостатки, и достоинства.
- Плюс: Развитые цепи управления, два дифференциальный усилителя (могут выполнять и логические функции)
- Минус: Однофазные выходы требуют дополнительной обвески (по сравнению с UC3825)
- Минус: Недоступно токовое управление, относительно медленная петля обратной связи (не критично в автомобильных ПН)
- Минус: Cинхронное включение двух и более ИС не так удобно, как в UC3825
1. Особенности ИС
Цепи ИОНа и защиты от недонапряжения питания. Схема включается при достижении питанием порога 5.5..7.0 В (типовое значение 6.4В). До этого момента внутренние шины контроля запрещают работу генератора и логической части схемы. Ток холостого хода при напряжении питания +15В (выходные транзисторы отключены) не более 10 мА. ИОН +5В (+4.75..+5.25 В, стабилизация по выходу не хуже +/- 25мВ) обеспечивает вытекающий ток до 10 мА. Умощнять ИОН можно только используя npn-эмиттерный повторитель (см TI стр. 19-20), но на выходе такого «стабилизатора» напряжение будет сильно зависеть от тока нагрузки.
Генератор вырабатывает на времязадающем конденсаторе Сt (вывод 5) пилообразное напряжение 0..+3.0В (амплитуда задана ИОНом) для TL494 Texas Instruments и 0…+2.8В для TL494 Motorola (чего же ждать от других?), соответственно для TI F=1.0/(RtCt), для Моторолы F=1.1/(RtCt).
Допустимы рабочие частоты от 1 до 300 кГц, при этом рекомендованный диапазон Rt = 1…500кОм, Ct=470пФ…10мкФ. При этом типовой температурный дрейф частоты составляет (естественно без учета дрейфа навесных компонентов) +/-3%, а уход частоты в зависимости от напряжения питания — в пределах 0.1% во всем допустимом диапазоне.
Для дистанционного выключения генератора можно внешним ключом замкнуть вход Rt (6) на выход ИОНа, или — замкнуть Ct на землю. Разумеется, сопротивление утечки разомкнутого ключа должно учитываться при выборе Rt, Ct.
Вход контроля фазы покоя (скважности) через компаратор фазы покоя задает необходимую минимальную паузу между импульсами в плечах схемы. Это необходимо как для недопущения сквозного тока в силовых каскадах за пределами ИС, так и для стабильной работы триггера — время переключения цифровой части TL494 составляет 200 нс. Выходной сигнал разрешен тогда, когда пила на Cт превышает напряжение на управляющем входе 4 (DT). На тактовых частотах до 150 кГц при нулевом управляющем напряжении фаза покоя = 3% периода (эквивалентное смещение управляющего сигнала 100..120 мВ), на больших частотах встроенная коррекция расширяет фазу покоя до 200..300 нс.
Используя цепь входа DT, можно задавать фиксированную фазу покоя (R-R делитель), режим мягкого старта (R-C), дистанционное выключение (ключ), а также использовать DT как линейный управляющий вход. Входная цепь собрана на pnp-транзисторах, поэтому входной ток (до 1.0 мкА) вытекает из ИС а не втекает в нее. Ток достаточно большой, поэтому следует избегать высокоомных резисторов (не более 100 кОм). На TI, стр. 23 приведен пример защиты от перенапряжения с использованием 3-выводного стабилитрона TL430 (431).
Усилители ошибки — фактически, операционные усилители с Ку=70..95дБ по постоянному напряжению (60 дБ для ранних серий), Ку=1 на 350 кГц. Входные цепи собраны на pnp-транзисторах, поэтому входной ток (до 1.0 мкА) вытекает из ИС а не втекает в нее. Ток достаточно большой для ОУ, напряжение смещения тоже (до 10мВ) поэтому следует избегать высокоомных резисторов в управляющих цепях (не более 100 кОм). Зато благодаря использованию pnp-входов диапазон входных напряжений — от -0.3В до Vпитания-2В.
Выходы двух усилителей объединены диодным ИЛИ. Тот усилитель, на выходе которого большее напряжение, перехватывает управление логикой. При этом выходной сигнал доступен не порознь, а только с выхода диодного ИЛИ (он же вход компаратора ошибки). Таким образом, только один усилитель может быть замкнут петлей ОС в линейном режиме. Этот усилитель и замыкает главную, линейную ОС по выходному напряжению. Второй усилитель при этом может использоваться как компаратор — например, превышения выходного тока, или как ключ на логический сигнал аварии (перегрев, КЗ и т.п.), дистанционного выключения и пр. Один из входов компаратора привязывается к ИОНу, на втором организуется логическое ИЛИ аварийных сигналов (еще лучше — логическое И сигналов нормальных состояний).
При использовании RC частотнозависимой ОС следует помнить, что выход усилителей — фактически однотактный (последовательный диод!), так что заряжать емкость (вверх) он зарядит, а вниз — разряжать будет долго. Напряжение на этом выходе находится в пределах 0..+3.5В (чуть больше размаха генератора), далее коэффициент напряжения резко падает и примерно при 4.5В на выходе усилители насыщаются. Аналогично, следует избегать низкоомных резисторов в цепи выхода усилителей (петли ОС).
Усилители не предназначены для работы в пределах одного такта рабочей частоты. При задержке распространения сигнала внутри усилителя в 400 нс они для этого слишком медленные, да и логика управления триггером не позволяет (возникали бы побочные импульсы на выходе). В реальных схемах ПН частота среза цепи ОС выбирается порядка 200-10000 Гц.
Триггер и логика управления выходами — При напряжении питания не менее 7В, если напряжение пилы на генераторе больше чем на управляющем входе DT, и если напряжение пилы больше чем на любом из усилителей ошибки (с учетом встроенных порогов и смещений) — разрешается выход схемы. При сбросе генератора из максимума в ноль — выходы отключаются. Триггер с парафазным выходом делит частоту надвое. При логическом 0 на входе 13 (режим выхода) фазы триггера объединяются по ИЛИ и подаются одновременно на оба выхода, при логической 1 — подаются парафазно на каждый выход порознь.
Выходные транзисторы — npn Дарлингтоны со встроенной тепловой защитой (но без защиты по току). Таким образом, минимальное падение напряжение между коллектором (как правило замкнутым на плюсовую шину) и эмитттером (на нагрузке) — 1.5В (типовое при 200 мА), а в схеме с общим эмиттером — чуть лучше, 1.1 В типовое. Предельный выходной ток (при одном открытом транзисторе) ограничен 500 мА, предельная мощность на весь кристалл — 1Вт.
2. Особенности применения
Работа на затвор МДП транзистора. Выходные повторители
При работе на емкостную нагрузку, какой условно является затвор МДП транзистора, выходные транзисторы TL494 включаются эмиттерным повторителем. При ограничении среднего тока в 200 мА схема способна достаточно быстро зарядить затвор, но разрядить его выключенным транзистором невозможно. Разряжать затвор с помощью заземленного резистора — также неудовлетворительно медленно. Ведь напряжение на условной емкости затвора спадает по экспоненте, а для закрытия транзистора затвор надо разрядить от 10В до не более 3В. Ток разряда через резистор будет всегда меньше тока заряда через транзистор (да и греться резистор будет неслабо, и красть ток ключа при ходе вверх).
Вариант А. Цепь разряда через внешний pnp транзистор (заимствовано на сайте Шихмана — см. «Блок питания усилителя Jensen»). При зарядке затвора ток, протекающий через диод, запирает внешний pnp-транзистор, при выключении выхода ИС — заперт диод, транзистор открывается и разряжает затвор на землю. Минус — работает только на небольшие емкости нагрузки (ограниченные токовым запасом выходного транзистора ИС).
При использовании TL598 (c двухтактным выходом) функция нижнего, разрядного, плеча уже зашита на кристалле. Вариант А в этом случае нецелесообразен.
Вариант Б. Независимый комплементарный повторитель. Так как основная токовая нагрузка отрабатывается внешним транзистором, емкость (ток заряда) нагрузки практически не ограничена. Транзисторы и диоды — любые ВЧ с небольшим напряжением насыщения и Cк, и достаточным запасом по току (1А в импульсе и более). Например, КТ644+646, КТ972+973. «Земля» повторителя должна распаиваться непосредственно рядом с истоком силового ключа. Коллекторы транзисторов повторителя обязательно зашунтировать керамической емкостью (на схеме не показана).
Какую схемы выбрать — зависит прежде всего от характера нагрузки (емкость затвора или заряд переключения), рабочей частоты, временных требований к фронтам импульса. А они (фронты) должны быть как можно быстрее, ведь именно на переходных процессах на МДП ключе рассеивается большая часть тепловых потерь. Рекомендую обратится к публикациям в сборнике International Rectifier для полного анализа задачи, сам же ограничусь примером.
Мощный транзистор — IRFI1010N — имеет справочный полный заряд на затворе Qg=130нКл. Это немало, ведь транзистор имеет исключительно большую площадь канала, чтобы обеспечить предельно низкое сопротивление канала (12 мОм). Именно такие ключи и требуются в 12В преобразователях, где каждый миллиом на счету. Чтоб гарантированно открыть канал, на затворе надо обеспечить Vg=+6В относительно земли, при этом полный заряд затвора Qg(Vg)=60нКл. Чтоб гарантированно разрядить затвор, заряженный до 10В, надо рассосать Qg(Vg)=90нКл.
При тактовой частоте 100 кГц и суммарной скважности 80% каждое плечо работает в режиме 4 мкс открыто — 6 мкс закрыто. Предположим, что длительность каждого фронта импульса должна быть не более 3% открытого состояния, т.е. tф=120 нс. Иначе резко возрастают тепловые потери на ключе. Таким образом, минимально приемлемый средний ток заряда Ig+=60 нКл/120 нс = 0.5А, ток разряда Ig-= 90нКл/120нс=0.75А. И это без учета нелинейного поведения емкостей затвора!
Сопоставляя требуемые токи с предельными для TL494, видно, что ее встроенный транзистор будет работать на предельном токе, и скорее всего не справится со своевременным зарядом затвора, так что выбор делается в пользу комплементарного повторителя. При меньшей рабочей частоте или при меньшей емкости затвора ключа возможен и вариант с разрядником.
2. Реализация защиты по току, мягкого старта, ограничения скважности
Как правило, в роли датчика тока так и просится последовательный резистор в цепи нагрузки. Но он будет красть драгоценные вольты и ватты на выходе преобразователя, да и контролировать только цепи нагрузки, а КЗ в первичных цепях обнаружить не сможет. Решение — индуктивный датчик тока в первичной цепи.
Собственно датчик (трансформатор тока) — миниатюрная тороидальная катушка (внутренний ее диаметр должен, помимо обмотки датчика, свободно пропустить провод первичной обмотки главного силового трансформатора). Сквозь тор пропускаем провод первичной обмотки трансформатора (но не «земляной» провод истока!). Постоянную времени нарастания детектора задаем порядка 3-10 периодов тактовой частоты, спада — в 10 раз более, исходя из тока срабатывания оптрона (порядка 2-10 мА при падении напряжения 1.2-1.6В).
В правой части схемы — два типовых решения для TL494. Делитель Rdt1-Rdt2 задает максимальную скважность (минимальную фазу покоя). Например, при Rdt1=4.7кОм, Rdt2=47кОм на выходе 4 постоянное напряжение Udt=450мВ, что соответствует фазе покоя 18..22% (в зависимости от серии ИС и рабочей частоты).
При включении питания Css разряжен и потенциал на входе DT равен Vref (+5В). Сss заряжается через Rss (она же Rdt2), плавно опуская потенциал DT до нижнего предела, ограниченного делителем. Это «мягкий старт». При Css=47мкФ и указанных резисторах выходы схемы открываются через 0.1 с после включения, и выходят на рабочую скважность еще в течении 0.3-0.5 с.
В схеме, помимо Rdt1, Rdt2, Css присутствуют две утечки — ток утечки оптрона (не выше 10 мкА при высоких температурах, порядка 0.1-1 мкА при комнатной температуре) и вытекающий из входа DT ток базы входного транзистора ИС. Чтобы эти токи не влияли существенно на точность делителя, Rdt2=Rss выбираем не выше 5 кОм, Rdt1 — не выше 100 кОм.
Разумеется, выбор именно оптрона и цепи DT для управления непринципиален. Возможно и использование усилителя ошибки в режиме компаратора, и блокировка емкости или резистора генератора (например, тем же оптроном) — но это именно выключение, а не плавное ограничение.
Коррекция усилителя ошибки
Классическая теория управления с обратной связью охватывает обширный класс электронных систем. С помощью теории управления могут быть проанализированы операционные усилители с замкнутой цепью обратной связи, электромеханические сервоприводы, контуры фазовой автоподстройки частоты, линейные и импульсные источники питания. Подробное рассмотрение теории обратной связи лежит за рамками данной книги. Очень удачно влияние передаточной функции (ПФ) анализирует Томас Фредериксен в главе 4 своей книги «Операционные усилители» (Thomas Frederiksen, “Intuitive IC Op Amps”, National Semiconductor Technology Series, 1984). Он описывает, как наличие полюсов и нулей передаточной функции может стабилизировать или приводить к самовозбуждению систему с замкнутой петлёй обратной связи. Краткое описание базовых принципов частотной коррекции усилителя приведено также в пользовательской инструкции 18 фирмы Linear Technology. Более глубокий анализ этих принципов можно найти в учебниках по теории управления.
Усилитель ошибки в ШИМ-контроллере не совсем эквивалентен обычному операционному усилителю, такому, как 741 или 1458. Операционные усилители имеют внутреннюю схему коррекции, которая сдвигает первый полюс передаточной функции за границу 100 Гц (обычно ниже 5 Гц). Наличие этого полюса оказывает доминирующее влияние на общие характеристики усилителя с замкнутой цепью обратной связи, снижая коэффициент усиления с ростом частоты. Усилитель ошибки в ШИМ-контроллере обычно не имеет внутренней схемы коррекции. С целью частотной коррекции усилителя ошибки вводится внешний контур обратной связи, что добавляет в ПФ системы дополнительные полюсы и нули.
Фазовая задержка в петле обратной связи импульсного источника питания может увеличиваться вследствие целого ряда причин. Основной вклад вносят дроссель и конденсатор фильтра, а именно их эквивалентные последовательные сопротивления (ЭПС). Комбинация дросселя и конденсатора в выходной цепи эквивалентна последовательной резонансной цепи, вносящей в передаточную характеристику два комплексных полюса. Передаточная характеристика изменяется в соответствии с колебаниями тока нагрузки и напряжения питания. Выходной конденсатор и его ЭПС формируют нуль ПФ. а нагрузка и выходной конденсатор образуют полюс. На Рис. 2.6 изображена эквивалентная схема, состоящая из выходного конденсатора, ЭПС и сопротивления нагрузки. Заметим, что ЭПС участвует в формировании как полюса, так и нуля.

Рис. 2.6. Эквивалентные последовательные сопротивления дросселя и конденсатора фильтра
Задача коррекции состоит в том, чтобы обеспечить быстрый отклик конечного источника питания на изменения нагрузки и входного напряжения, но исключить возможность самовозбуждения. Сильно демпфирующая коррекция гарантирует отсутствие самовозбуждения, но реакция на быстрые изменения входных или выходных параметров будет слишком медленной, что может также привести к значительным перегрузкам в случае короткого замыкания. С другой стороны, слишком быстрая реакция приведёт к самовозбуждению в цепи управления.
На Рис. 2.7 изображена типовая схема коррекции для понижающего или прямоходового преобразователя. Резистор с конденсатором добавляют полюс в передаточную характеристику. Эту схему коррекции необходимо оптимизировать как

Рис. 2.7. Типовая схема коррекции для понижающего или прямоходового преобразователя
по коэффициенту усиления, так и по частоте. Резистор и конденсатор выступают в качестве демпфера с целью снижения добротности цепи.
На Рис. 2.8 изображена типовая схема коррекции для повышающего и обратноходового преобразователей, работающих в непрерывном режиме. Все повышающие и обратноходовые преобразователи с непрерывным током дросселя имеют нуль в правой полуплоскости передаточной характеристики. Поэтому в передаточную характеристику контура обратной связи требуется добавить второй полюс. Этот полюс должен снижать коэффициент усиления на частотах, меньших частоты нуля в правой полуплоскости. Полюсы и нули в правой полуплоскости передаточной характеристики соответствуют откликам, интенсивность которых постоянно возрастает со временем. Влияние нуля в правой полуплоскости можно наглядно продемонстрировать, если запустить повышающий преобразователь, рассчитанный без второго полюса. Выходное напряжение совершит катастрофический скачок вверх.

Рис. 2.8. Типовая схема коррекции для повышающего или обратноходового преобразователя
в непрерывном режиме работы
Ни в одной из инструкций по применению от производителей интегральных схем не приводится точный метод математического расчёта переходной характеристики импульсного источника питания. Инструкция U-95 фирмы Texas Instruments содержит некое руководство по расчёту схем коррекции линейного источника питания, которое можно применить и для анализа импульсного источника питания. Впрочем, если вы хорошо знаете математику, то эта книга вам скорее всего не понадобится.
Я предпочитаю описанный в инструкциях 19 и 25 фирмы Linear Technology эмпирический метод определения оптимальности схемы коррекции, в котором используется не частотный, а временной анализ. В этих инструкциях содержится описание серии контроллеров с управлением по току LT1070, но указанная методика применима ко всем импульсным источникам питания, имеющим усилитель тока ошибки.
На Рис. 2.9 изображена испытательная установка, основанная на инструкциях от Linear Technology. Потребуется три элемента испытательного оборудования. Во-первых, переменная нагрузка. Она может быть активно регулируемой или состоять из простого набора мощных резисторов. Во-вторых, осциллограф для наблюдения переходной характеристики источника питания. И наконец, генератор, который будет вносить в нагрузку изменения. Нас интересует только отклик на эти изменения, поэтому между выходом источника питания и входом осциллографа мы поместим фильтр нижних частот. Таким образом, мы будем наблюдать только постоянную составляющую без высокочастотного сигнала коммутаций. Осциллограф нужно синхронизировать с выходом генератора.

Рис. 2.9. Испытательная установка для настройки схемы коррекции в импульсных источниках питания
ШИМ, PWM контроллер. Усилитель ошибки. Частота. Инвертирующий, неинвертирующий входы. Синхронизация. Обратная связь. Применение
Резистор и конденсатор, задающие частоту работы контроллера (RT, CT). Контроллер работает на определенной частоте. Импульсы следуют с этой частотой. Контроллер меняет длительность импульсов, но не частоту. Это значит, что чем короче импульс, тем длиннее пауза и наоборот, а частота следования остается постоянной. Конденсатор, подключенный между CT и общим проводом, и резистор, подключенный между RT и общим проводом, задают частоту работы контроллера.

Импульсы синхронизации (CLOCK). Иногда необходимо заставить работать несколько контроллеров синхронно. Тогда к одному контроллеру (ведущему) подключают частотозадающие конденсатор и резистор. На ножке CLOCK ведущего контроллера появляются короткие импульсы напряжения. Эти импульсы подаются на ножки CLOCK других контроллеров (ведомых). Ножки RT ведомых контроллеров соединяются с VREF этих контроллеров, а ножки CT — с общим проводом.
Напряжение для сравнения (RAMP). На эту ножку нужно подать пилообразное напряжение. В момент возникновения импульса синхронизации на выходе контроллера появляется открывающее управляющее напряжение. Далее, как только напряжение на RAMP превышает напряжение на выходе усилителя ошибки на определенную величину, на выходе возникает закрывающее напряжение. Так что импульс длится от момента синхронизационного импульса до момента превышения напряжения на RAMP над напряжением выхода усилителя ошибки. Этим и достигается ШИМ. В классической схеме на RAMP подается напряжение с CT. Там как раз отличная пила. Есть и другие варианты включения.
Вашему вниманию подборки материалов:
Конструирование источников питания и преобразователей напряжения Разработка источников питания и преобразователей напряжения. Типовые схемы. Примеры готовых устройств. Онлайн расчет. Возможность задать вопрос авторам
Практика проектирования электронных схем Искусство разработки устройств. Элементная база. Типовые схемы. Примеры готовых устройств. Подробные описания. Онлайн расчет. Возможность задать вопрос авторам
Инвертирующий и неинвертирующий входы усилителя ошибки (INV, NONINV). На входе ШИМ контроллера стоит обычный операционный усилитель. Это его инвертирующий и неинвертирующий входы. Увеличение напряжения на неинвертирующем входе приводит к увеличению длительности импульсов, уменьшение — к уменьшению. С инвертирующим входом все наоборот. Обычно неинвертирующий вход подключают к ножке опорного напряжения, а на инвертирующий вывод подают выходное напряжение через делитель и цепь обратной связи.
Выход усилителя ошибки (EAOUT). Казалось бы, нет ничего проще. Подаем на NONINV опорное напряжение, но INV — часть выходного напряжения, такую, чтобы она равнялась опорному при нужном выходном. Но так ничего не получится в связи с тем, что преобразователь напряжения имеет довольно медленную реакцию на управление. Пока выходное напряжение увеличится или уменьшится, проходит довольно большое время. Так что если подать выходное напряжение через делитель непосредственно на INV, то полученная отрицательная обратная связь на некоторой частоте из-за задержки превратится в положительную. Устройство возбудится, на выходе появится вместо требуемого сигнал сложной формы. Из-за возбуждения устройство, скорее всего, выйдет из строя. Чтобы победить возбуждение, используется выход EOUT. С него сигнал через частотно зависимые цепи подается на INV, достигается частотная коррекция усилителя ошибки. Есть целая теория, которая описывает, как вычислить нужные номиналы частотокорректирующих цепей. Но проводя расчеты в соответствии с этой теорией, мы никогда не получали точно подходящих значений. Мы выработали собственную методику проектирования цепей обратной связи по напряжению. Об этом будет отдельная статья. Подпишитесь на новости, чтобы не пропустить
К сожалению в статьях периодически встречаются ошибки, они исправляются, статьи дополняются, развиваются, готовятся новые. Подпишитесь, на новости, чтобы быть в курсе.
Какая минимальная длинна импульса возможна в шим контроллерах (минимальный коэффициент заполнения)? На практике получается что, к примеру, sg3525 запускается с минимальной шириной примерно 1 микросекунда. Есть ли методика расчета этого параметра? Очень актуально при разработке импульсных блоков питания с регулировкой напряжения от нуля вольт. Читать ответ.
Конструирование (проектирование и расчет) источников питания и преобра.
Разработка источников питания и преобразователей напряжения. Типовые схемы. Прим.
Микроконтроллеры — пример простейшей схемы, образец применения. Фузы (.
Самая первая Ваша схема на микро-контроллере. Простой пример. Что такой фузы.
Защита силового ключа от перенапряжения. Сброс скачков напряжения на т.
Как защитить силовой транзистор от пробоя броском высокого напряжения. Описание .
Использование переключающихся конденсаторов в бестрансформаторном исто.
Вариант бестрансформаторной схемы источника питания с переключением конденсаторо.
Автомат периодического включения — выключения нагрузки. Схема, устройс.
Устройство, регулярно (три раза в день на полчаса) автоматически включающее и вы.
Оптроны, оптопары тиристорные, динисторные. MOC3061, MOC3062, MOC3063.
Описание и параметры MOC3061, MOC3062, MOC3063. Применение в тиристорных схемах .
Усилитель ошибки шим как работает
Драйверостроение ч. 4: тонкости стабилизации, или немножко о САУ

Пора бы, пожалуй, продолжить излагать принципы правильного построения драйверов (и не только драйверов кстати сказать). Но в этот раз, боюсь, для подготовленных читателей:)
В прошлых сериях:
Драйверостроение Ч. 0: вступительная или пилотный эпизод
Драйверостроение ч. 1: Как соединять диоды?
Драйверостроение ч.2: Практическая или из дерьма и палок
Драйверостроение ч. 3: Драйверы бывают разные…
Выбор силовой схемы мы рассмотрели, но это лишь пол-драйвера. Поскольку он стабилизирует ток им надо управлять — менять коэффициент заполнения таким образом, чтобы выходной ток оставался неизменным (или не более установленного) — это называется регулирование.
Вообще, выходное напряжение (или ток) подчиняется строгим законам — закону регулирования импульсного преобразователя: Uвых=D * Uвх для понижающего, или Uвх=Uвх * (1/(1-D)) для повышающего преобразователя.
Но поскольку входное напряжение изменяется, изменяются падения напряжения на транзисторах, диодах, обмотках дросселей необходима система автоматического регулирования (САУ). Теория САУ очень обширная область знания, особенно в плане устойчивости, поэтому тут мы рассмотрим чистую практику.
Чтобы измерить ток в цепь его протекания обычно включают шунт — резистор с которого снимают напряжение. Например при выходном токе 0,5 А мы используем шунт 0,2 Ом, таким образом падение напряжения на нем будет 0,1 В — его мы должны сравнивать с опорным (Reference) при помощи усилителя ошибки (GM Amplifier в нашем примере)
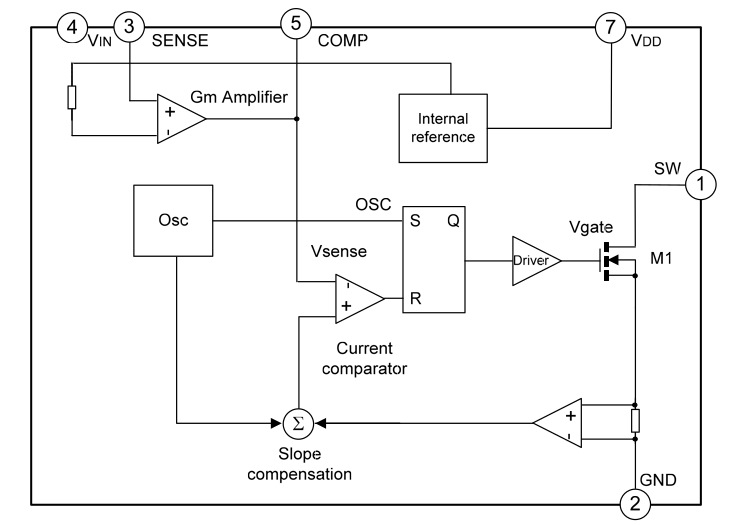
Сигнал с выхода усилителя ошибки подается на вход ШИМ-компаратора (Current comparator), его пока оставим в покое. Обычно выход усилителя ошибки выведен наружу под именем COMP — на него вешается RC цепь или просто конденсатор (часто в стабилизаторах тока) являющиеся цепями компенсации исключающими неустойчивость схемы управления. Из теории стоит привести критерий устойчивости: усиление в петле обратной связи при росте частоты должно упасть ниже единицы до того как вращение фазы сигнала не достигнет 180 градусов. То есть усилитель должен уже ничего не усиливать в тот момент когда сигнал обратной связи становится инверсным на некой частоте. Иначе схема стабилизации станет генератором. Но на практике цепи компенсации чаще всего выбираются из рекомендаций даташитов и подбор почти никогда не требуется.
Поэтому сосредоточимся на главной проблеме — работе непосредственно ШИМ-компаратора. Существуют два основных принципа ШИМ-регулирования: токовый и по напряжению.
Метод регулирования по напряжению предполагает что в компараторе сигнал усилителя ошибки сравнивается с сигналов внутреннего генератора пилообразного напряжения, он используется в сетевых двухтактных блоках питания и описан в документации к микросхеме TL494 (в т.ч. на русском языке).
А вот в DC/DC преобразователях (обычно в любых преобразователях с дросселем, т.е. с накоплением энергии в индуктивности) принято использовать токовое управление, как в приведенной выше схеме — в цепь истока ключа включен шунт напряжение с которого (пилообразное к слову — ток через дроссель ведь пилообразный) сравнивается компаратором с напряжением ошибки.
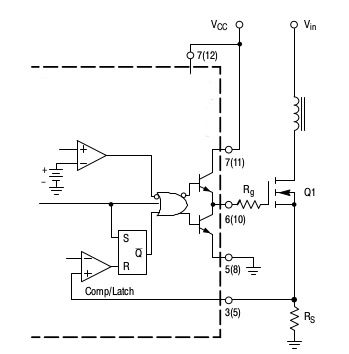
Что он нам дает? а вот что:
— ток через ключ ограничен, схема не боится КЗ, ее нельзя сжечь,
— регулирование хорошо работает в любых режимах — КЗ, обрыв нагрузки, запуск
— одним компаратором контролируется ток ключа, ток нагрузки.
Вообще попытки сделать DC/DC без контроля тока ключа — честно говоря явное дилетанство. Не надо так делать
Но есть еще один немаловажный момент, это работа преобразователя с большими коэффициентами заполнения (характерно кстати для понижающего драйвера с питанием от 12 В работающего на три диода, то есть 9 В).
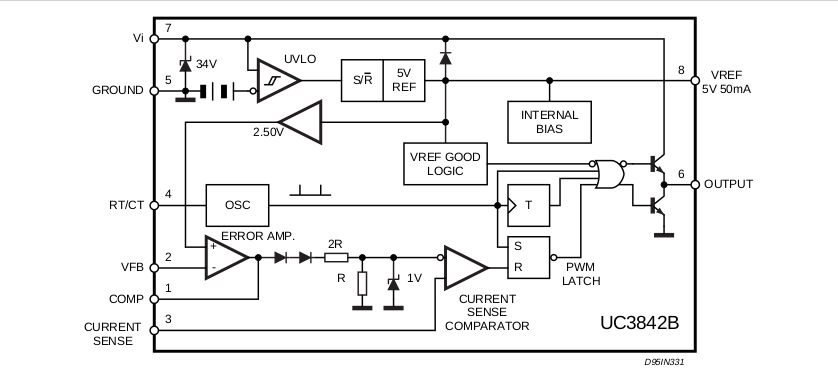
и сравнить ее с тем что я привел можно обнаружить в первой схеме дополнительный элемент — сумматор (обозначен математическим знаком суммы) который подмешивает сигнал генератора (пилообразный) к сигналу с токового шунта. Делается это потому (если вкратце) что компаратор плохо срабатывает от токового сигнала с малым наклоном который случается особенно часто в режимах с большим D. То есть в тяжелых условиях работы. Возникают так называемые субгармонические колебания тока — компаратор отключает ключ то раньше, то позже. Возникают паразитные колебания, а это лишние помехи и вообще стремно.
Чтобы не быть голословным вот
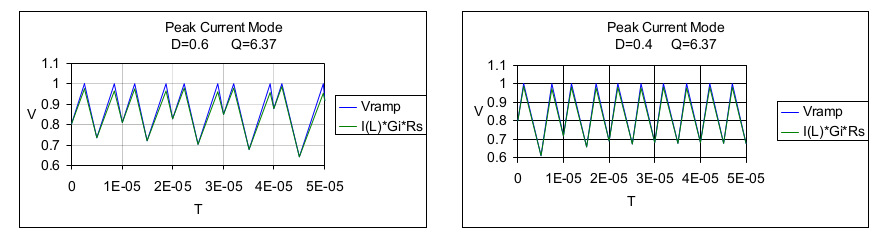
из документа snva555 «UNDERSTANDING AND APPLYING CURRENT-MODE
CONTROL THEORY» от TI.
Так вот подобные навороты — это хороший тон в источниках питания, и я крайне советую без них ничего серьезного не делать. Или делать на свой страх и риск.
В схемах на микросхемах вроде UC3843 такое улучшение делается внешними элементами (читать рекомендации по применению, к примеру sluu176 от TI). А вот для микросхем с интегрированными ключами (а они чаще всего используются) наличие внутри такой схемы, т.н. Slope Compensation, является хорошим тоном.
Например, заглянем в даташит популярной PT4115
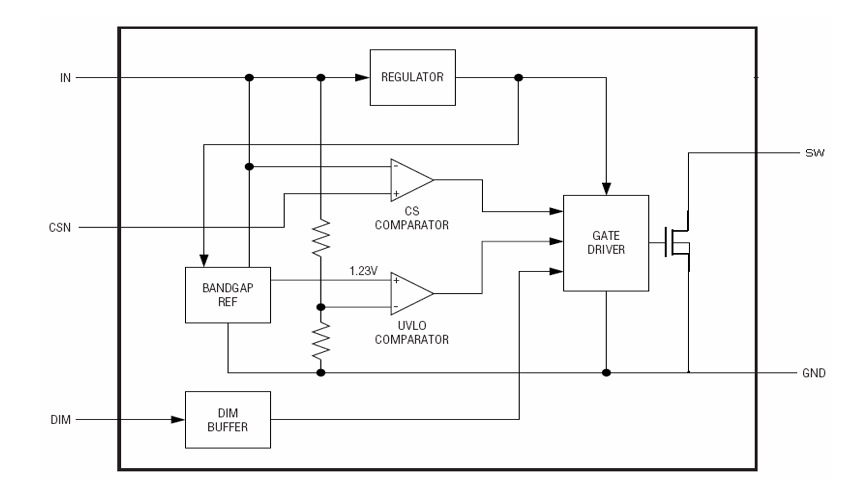
Контроля тока ключа не нарисовано, никаких сумматоров и Slope Compensation в помине и нет. Токового управления нормального нет. Может в ней какие-то другие схемы реализованы? А может работает на честном слове и ладно. Только ЭМС не ждите от таких драйверов.
Есть гораздо более печальный пример — НV9910 которую часто применяют китайцы, не имеющую вообще ШИМ-регулирования, а только кривое частотное. В условиях низких разниц напряжений вход-выход она очень часто теряет устойчивость, что видно по китайским балкам жгущим автомобили.
Есть более новый аналог у которого вроде нет явных косяков по устойчивости — HV9961, ее применяют в изделиях фирмы PROLIGHT. Но я бы все равно не стал бы применять микросхемы сетевых драйверов в бортсети авто, мало ли что.
Выбирайте правильные микросхемы, и да прибудет с вами устойчивость!)
PS: для пополнения более основательных знаний в области силовой электроники можно почитать книжку Б.Ю. Семенов. Силовая электроника.. Думаю не имеет смысла мне тут переписывать ее содержание)
TL494, что это за «зверь» такой?
TL494 (Texas Instruments) — это наверное самый распространённый ШИМ-контроллер, на базе которого создавалась основная масса компьютерных блоков питания, и силовые части различных бытовых приборов.
Да и сейчас эта микросхема довольно популярна среди радиолюбителей, занимающихся построением импульсных блоков питания. Отечественный аналог этой микросхемы — М1114ЕУ4 (КР1114ЕУ4). Кроме того ещё разные зарубежные фирмы выпускают данную микросхему с разными названиями. Например IR3M02 (Sharp), KA7500 (Samsung), MB3759 (Fujitsu). Всё это одна и та же микросхема.
Возраст её гораздо моложе TL431. Выпускаться он начала фирмой Texas Instruments где то с конца 90-х — начала 2000-х годов.
Давайте-ка вместе попробуем разобраться, что она из себя представляет и что это за «зверь» такой? Рассматривать мы будем микросхему TL494 (Texas Instruments).

И так, для начала посмотрим, что у неё внутри.
Состав.
В её составе имеется:
— генератор пилообразного напряжения (ГПН);
— компаратор регулировки мертвого времени (DA1);
— компаратор регулировки ШИМ (DA2);
— усилитель ошибки 1 (DA3), используется в основном по напряжению;
— усилитель ошибки 2 (DA4), используется в основном по сигналу ограничения тока;
— стабильный источник опорного напряжения (ИОН) на 5В с внешним выводом 14;
— схема управления работой выходного каскада.
Потом все её составные части мы конечно рассмотрим и постараемся разобраться, для чего всё это нужно и как всё это работает, но для начала необходимо будет привести её рабочие параметры (характеристики).
Рекомендуемые рабочие параметры.
| Параметры | Мин. | Макс. | Ед. Изм. |
| VCC Напряжение питания | 7 | 40 | В |
| VI Напряжение на входе усилителя | -0,3 | VCC – 2 | В |
| VO Напряжение на коллекторе | 40 | В | |
| Ток коллектора (каждого транзистора) | 200 | мА | |
| Ток обратной связи | 0,3 | мА | |
| fOSC Частота генератора | 1 | 300 | кГц |
| CT Емкость конденсатора генератора | 0,47 | 10000 | нФ |
| RT Сопротивление резистора генератора | 1,8 | 500 | кОм |
| TA Рабочая температура TL494C TL494I |
0 | 70 | °C |
| -40 | 85 | °C |
Предельные её характеристики следующие;
Напряжение питания. 41В
Входное напряжение усилителя. (Vcc+0.3)В
Выходное напряжение коллектора. 41В
Выходной ток коллектора. 250мА
Общая мощность рассеивания в непрерывном режиме. 1Вт
Расположение и назначение выводов микросхемы.
Это не инвертирующий (положительный) вход усилителя ошибки 1.
Если входное напряжение на нём будет ниже, чем напряжение на выводе 2, то на выходе этого усилителя ошибки 1, напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если на этом выводе напряжение будет выше, чем на выводе 2, то на выходе этого усилителя 1, появится напряжение (выход усилителя 1, будет иметь высокий уровень) и ширина (скважность) выходных импульсов будет уменьшаться тем больше, чем выше выходное напряжение этого усилителя (максимум 3,3 вольта).
Это инвертирующий (отрицательный) вход усилителя сигнала ошибки 1.
Если входное напряжение на этом выводе выше, чем на выводе 1, на выходе усилителя ошибки напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если же напряжение на этом выводе ниже, чем на выводе 1, выход усилителя будет иметь высокий уровень.
Усилитель ошибки, это обычный ОУ с коэффициентом усиления порядка = 70..95дБ по постоянному напряжению, (Ку = 1 на частоте 350 кГц). Диапазон входных напряжений ОУ простирается от -0.3В и до напряжения питания, минус 2В. То есть максимальное входное напряжение должно быть ниже напряжения питания минимум на два вольта.
Это выходы усилителей ошибки 1 и 2, соединённых с этим выводом через диоды (схема ИЛИ). Если напряжение на выходе какого-либо усилителя меняется с низкого на высокий уровень, то на выводе 3 оно также переходит в высокий.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе микросхемы пропадают (нулевая скважность).
Если напряжение на этом выводе близко к 0 В, тогда длительность выходных импульсов (скважность) будет максимальна.
Вывод 3 обычно используется для обеспечения ОС усилителей, но если это необходимо, то вывод 3 может быть использован и в качестве входного, для обеспечения изменения ширины импульсов.
Если напряжение на нем высокое (>
3,5 В), то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Он управляет диапазоном изменения «мёртвого» времени (англ. Dead-Time Control), в принципе это та же самая скважность.
Если напряжение на нем будет близко к 0 В, то на выходе микросхемы будут, как минимально возможные, так и максимальные по ширине импульсы, что соответственно может задаваться другими входными сигналами (усилители ошибок, вывод 3).
Если напряжение на этом выводе будет около 1,5 В, то ширина выходных импульсов будет в районе 50% от их максимальной ширины.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Но стоит не забывать, что при увеличении «мёртвого» времени, диапазон регулировки ШИМ будет уменьшаться.
Изменяя напряжение на выводе 4, можно задавать фиксированную ширину «мёртвого» времени (R-R делителем), осуществить в БП режим мягкого старта (R-C цепочкой), обеспечить дистанционное выключение МС (ключ), а также можно использовать этот вывод, как линейный управляющий вход.
Давайте рассмотрим (для тех, кто не знает), что такое «мёртвое» время и для чего оно нужно.
При работе двухтактной схемы БП, импульсы поочерёдно подаются с выходов микросхемы на базы (затворы) выходных транзисторов. Так как любой транзистор — элемент инерционный, он не может мгновенно закрыться (открыться) при снятии (подаче) сигнала с базы (затвора) выходного транзистора. И если на выходные транзисторы подавать импульсы без «мёртвого» времени (то есть с одного импульс снять и на второй сразу подать), может наступить такой момент, когда один транзистор не успеет закрыться, а второй уже открылся. Тогда весь ток (называется сквозной ток) потечёт через оба открытых транзистора минуя нагрузку (обмотку трансформатора), и так как он ни чем не будет ограничен, выходные транзисторы мгновенно выйдут из строя.
Чтобы такое не произошло, необходимо после окончания одного импульса и до начала следующего — прошло какое-то определённое время, достаточное для надёжного закрытия того выходного транзистора, со входа которого снят управляющий сигнал.
Это время и называется «мёртвым» временем.
Да, ещё если посмотреть рисунок с составом микросхемы, то мы видим, что вывод 4 соединён со входом компаратора регулировки мертвым временем (DA1) через источник напряжения, величиной 0,1-0,12 В. Для чего это сделано?
Это как раз и сделано для того, чтобы максимальная ширина (скважность) выходных импульсов никогда не была равна 100%, для обеспечения безопасной работы выходных (выходного) транзисторов.
То есть если «посадить» вывод 4 на общий провод, то на входе компаратора DA1 всё равно не будет нулевого напряжения, а будет напряжение как раз этой величины (0,1-0,12 В) и импульсы с генератора пилообразного напряжения (ГПН) появятся на выходе микросхемы только тогда, когда их амплитуда на выводе 5, превысит это напряжение. То есть микросхема имеет фиксированный максимальный порог скважности выходных импульсов, который не превысит для однотактного режима работы выходного каскада 95-96%, и для двухтактного режима работы выходного каскада — 47,5-48%.
Это вывод ГПН, он предназначен для подключения к нему времязадающего конденсатора Ct, второй конец которого подсоединяется к общему проводу. Ёмкость его выбирается обычно от 0,01 мкФ до 0,1 мкФ, в зависимости от выходной частоты ГПН импульсов ШИМ-контроллера. Как правило здесь используются конденсаторы высокого качества.
Выходную частоту ГПН можно как раз контролировать на этом выводе. Размах выходного напряжения генератора (амплитуда выходных импульсов) где-то в районе 3-х вольт.
Тоже вывод ГПН, предназначенный для подключения к нему врямя-задающего резистора Rt, второй конец которого подсоединяется к общему проводу.
Величины Rt и Ct определяют выходную частоту ГПН, и рассчитываются по формуле для однотактного режима работы;
Где F, R, C — кГц, кОм, мкФ. Для двухтактного режима работы формула имеет следующий вид;
Для ШИМ-контроллеров других фирм, частота рассчитывается по такой же формуле, за исключением — цифру 1 необходимо будет поменять на 1,1.
Он присоединяется к общему проводу схемы устройства на ШИМ-контроллере.
В составе микросхемы имеется выходной каскад с двумя выходными транзисторами, которые являются ее выходными ключами. Выводы коллекторов и эмиттеров этих транзисторов свободные, и поэтому в зависимости от необходимости, эти транзисторы можно включать в схему для работы как с общим эмиттером, так и с общим коллектором.
В зависимости от напряжения на выводе 13, этот выходной каскад может работать как в двухтактном режиме работы, так и в однотактном. В однотактном режиме работы эти транзисторы можно соединять параллельно для увеличения тока нагрузки, что обычно и делают.
Так вот, вывод 8, это вывод коллектора транзистора 1.
Это вывод эмиттера транзистора 1.
Это вывод эмиттера транзистора 2.
Это коллектор транзистора 2.
К этому выводу подсоединяется «плюс» источника питания TL494CN.
Это вывод выбора режима работы выходного каскада. Если этот вывод подсоединить к общему проводу, выходной каскад будет работать в однотактном режиме. Выходные сигналы на выводах транзисторных ключей будут одинаковыми.
Если подать на этот вывод напряжение +5 В (соединить между собой выводы 13 и 14), то выходные ключи будут работать в двухтактном режиме. Выходные сигналы на выводах транзисторных ключей будут противофазны и частота выходных импульсов будет в два раза меньше.
Это выход стабильного Источника Опорного Напряжения (ИОН), С выходным напряжением +5 В и выходным током до 10 мА, которое может быть использовано в качестве образцового для сравнения в усилителях ошибки, и в других целях.
Он работает точно так же, как и вывод 2. Если второй усилитель ошибки не используется, то вывод 15 просто подключают к 14-му выводу (опорное напряжение +5 В).
Он работает так же, как и вывод 1. Если второй усилитель ошибки не используется, то его обычно подключают к общему проводу (вывод 7).
С выводом 15, подключенным к +5 В и выводом 16, подключенным к общему проводу, выходное напряжение второго усилителя отсутствует, поэтому он не оказывает никакого влияния на работу микросхемы.
Принцип работы микросхемы.
Так как же работает ШИМ-контроллер TL494.
Выше мы подробно рассмотрели назначение выводов этой микросхемы и какую функцию они выполняют.
Если всё это тщательно проанализировать, то из всего этого становится ясно, как работает эта микросхема. Но я ещё раз очень кратко опишу принцип её работы.
При типовом включении микросхемы и подаче на неё питания (минус на вывод 7, плюс на вывод 12), ГПН начинает вырабатывать пилообразные импульсы, амплитудой около 3-х вольт, частота которых зависит от подключенных С и R к выводам 5 и 6 микросхемы.
Если величина управляющих сигналов (на выводе 3 и 4) меньше 3-х вольт, то на выходных ключах микросхемы появляются прямоугольные импульсы, ширина которых (скважность) зависит от величины управляющих сигналов на выводе 3 и 4.
То есть в микросхеме идёт сравнение положительного пилообразного напряжения с конденсатора Ct (C1) с любым из двух управляющих сигналов.
Логические схемы управления выходными транзисторами VT1 и VT2, открывают их только тогда, когда напряжение пилообразных импульсов выше сигналов управления. И чем больше эта разница, тем шире выходной импульс (больше скважность).
Управляющее напряжение на выводе 3 в свою очередь зависит от сигналов на входах операционных усилителей (усилителей ошибок), которые в свою очередь могут контролировать выходное напряжение и выходной ток БП.
Таким образом, увеличение или уменьшение величины какого либо управляющего сигнала, вызывает соответственно линейное уменьшение или увеличение ширины импульсов напряжения на выходах микросхемы.
В качестве управляющих сигналов, как уже было сказано выше, может быть использовано напряжение с вывода 4 (управление «мертвым временем»), входы усилителей ошибки или вход сигнала обратной связи непосредственно с вывода 3.
Теория, как говорится теорией, но гораздо будет лучше всё это посмотреть и «пощупать» на практике, поэтому соберём на макетной плате следующую схемку и посмотрим воочию, как всё это работает.
Самый простой и быстрый способ — собрать всё это на макетной плате. Да, микросхему я поставил КА7500. Вывод «13» микросхемы посадил на общий провод, то есть у нас выходные ключи будут работать в однотактном режиме (сигналы на транзисторах будут одинаковыми), а частота повторения выходных импульсов, будет соответствовать частоте пилообразного напряжения ГПН.

Осциллограф я подключил к следующим контрольным точкам:
— Первый луч к выводу «4», для контроля постоянного напряжения на этом выводе. Находится в центре экрана на нулевой линии. Чувствительность — 1 вольт на деление;
— Второй луч к выводу «5», для контроля пилообразного напряжения ГПН. Находится он так же на нулевой линии (совмещены оба луча) в центре осциллографа и с такой же чувствительностью;
— Третий луч на выход микросхемы к выводу «9», для контроля импульсов на выходе микросхемы. Чувствительность луча 5 вольт на деление (0,5 вольт, плюс делитель на 10). Находится в нижней части экрана осциллографа.

Забыл сказать, выходные ключи микросхемы подключены с общим коллектором. По другому сказать — по схеме эмиттерного повторителя. Почему повторителя? Потому что сигнал на эмиттере транзистора в точности повторяет сигнал базы, чтобы нам всё было хорошо видно.
Если снимать сигнал с коллектора транзистора, то он будет инвертирован (перевёрнут) по отношению к сигналу базы.
Подаём питание на микросхему и смотрим что у нас имеется на выводах.

На четвёртой ножке у нас ноль (бегунок подстроечного резистора в крайнем нижнем положении), первый луч находится на нулевой линии в центре экрана. Усилители ошибки тоже не работают.
На пятой ножке мы видим пилообразное напряжение ГПН (второй луч), амплитудой чуть больше 3-х вольт.
На выходе микросхемы (вывод 9) мы видим прямоугольные импульсы, амплитудой около 15-ти вольт и максимальной ширины (96%). Точки в нижней части экрана — это как раз фиксированный порог скважности и есть. Чтобы его было лучше видно, включим растяжку на осциллографе.

Ну вот, сейчас видно лучше. Это как раз и есть время, когда амплитуда импульса падает до нуля и выходной транзистор закрыт это короткое время. Уровень нуля для этого луча в нижней части экрана.
Ну что, давайте добавим напряжение на вывод «4» и посмотрим что у нас получается.

На выводе «4» подстроечным резистором я установил постоянное напряжение величиной 1 вольт, первый луч поднялся на одно деление (прямая линия на экране осциллографа). Что мы видим? Мёртвое время увеличилось (уменьшилась скважность), это пунктирная линия в нижней части экрана. То есть выходной транзистор закрыт на время уже примерно на половину длительности самого импульса.
Добавим ещё один вольт подстроечным резистором на вывод «4» микросхемы.

Мы видим, что первый луч поднялся ещё на одно деление вверх, длительность выходных импульсов стала ещё меньше (1/3 от длительности всего импульса), а мёртвое время (время закрытия выходного транзистора) увеличилось до двух третьей. То есть наглядно видно, что логика микросхемы сравнивает уровень сигнала ГПН с уровнем управляющего сигнала, и пропускает на выход только тот сигнал ГПН, уровень которого выше управляющего сигнала.
Чтобы стало ещё понятней — длительность (ширина) выходных импульсов микросхемы будет такой, какой является длительность (ширина) выходных импульсов пилообразного напряжения находящихся выше уровня управляющего сигнала (выше прямой линии на экране осциллографа).

Идём дальше, добавляем ещё один вольт на вывод «4» микросхемы. Что мы видим? На выходе микросхемы очень короткие импульсы, по ширине примерно такие же, как и выступающие выше прямой линии верхушки пилообразного напряжения. Включим растяжку на осциллографе, чтобы импульс было лучше видно.

Вот, мы видим короткий импульс, в течении которого выходной транзистор будет открыт, а всё остальное время (нижняя линия на экране) будет закрыт.
Ну что, попробуем поднять напряжение на выводе «4» ещё больше. Ставим подстроечным резистором напряжение на выводе выше уровня пилообразного напряжения ГПН.

Ну всё, БП у нас перестанет работать, так как на выходе полный «штиль». Выходных импульсов нет, так как на управляющем выводе «4» у нас постоянное напряжение уровнем больше 3,3 вольта.
Абсолютно то же самое будет, если подавать управляющий сигнал и на вывод «3», или на какой либо усилитель ошибки. Кому интересно, можете сами проверить опытным путём. Притом, если управляющие сигналы будут сразу на всех управляющих выводах, управлять микросхемой (преобладать), будет сигнал с того управляющего вывода, амплитуда которого больше.
Ну что, давайте попробуем отключить вывод «13» от общего провода и подсоединить его к выводу «14», то есть переключить режим работы выходных ключей из однотактного в двухтактный. Посмотрим, что у нас получится.

Подстроечным резистором выводим опять напряжение на выводе «4» на ноль. Включаем питание. Что мы видим?
На выходе микросхемы так же присутствуют прямоугольные импульсы максимальной длительности, но их частота следования стала в два раза меньше частоты пилообразных импульсов.
Такие же самые импульсы будут и на втором ключевом транзисторе микросхемы (вывод 10), с той лишь разницей, что они будут сдвинуты по времени относительно этих на 180 градусов.
Здесь так же присутствует максимальный порог скважности (2%). Сейчас его не видно, нужно подключать 4-й луч осциллографа и совмещать вместе два выходных сигнала. Щупа четвёртого нет под рукой, поэтому этого не сделал. Кто хочет, проверьте практически сами, чтобы в этом удостовериться.
В таком режиме микросхема работает точно так же, как и в однотактном режиме, лишь с той разницей, что максимальная длительность выходных импульсов здесь не будет превышать 48% от общей длительности импульса.
Так что долго рассматривать этот режим мы не будем, а просто посмотрим, какие у нас будут импульсы при напряжении на выводе «4» в два вольта.

Поднимаем напряжение подстроечным резистором. Ширина выходных импульсов уменьшилась до 1/6 общей длительности импульса, то есть тоже ровно в два раза, чем в однотактном режиме работы выходных ключей (там в 1/3 раза).
На выводе второго транзистора (вывод 10) будут такие же импульсы, только сдвинутые по времени на 180 градусов.
Ну вот в принципе мы и разобрали работу ШИМ контроллера.
Ещё по выводу «4». Как говорилось раньше, этот вывод можно использовать для «мягкого» старта блока питания. Как это организовать?
Очень просто. Для этого подключаем к выводу «4» RC цепочку. Вот например фрагмент схемы:

Как здесь работает «мягкий старт»? Смотрим схему. Конденсатор С1 через резистор R5 подключен к ИОН (+5 вольт).
При подаче питания на микросхему (вывод 12), на выводе 14 появляется +5 вольт. Начинает заряжаться конденсатор С1. Через резистор R5 протекает зарядный ток конденсатора, в момент включения он максимальный (конденсатор разряжен) и на резисторе возникает падение напряжения 5 вольт, которое подаётся на вывод «4». Это напряжение, как мы уже выяснили опытным путём, запрещает прохождение импульсов на выход микросхемы.
По мере заряда конденсатора, зарядный ток уменьшается и соответственно уменьшается и падение напряжения на резисторе. Напряжение на выводе «4» также уменьшается и на выходе микросхемы начинают появляться импульсы, длительность которых постепенно увеличивается (по мере заряда конденсатора). Когда конденсатор зарядится полностью — зарядный ток прекращается, напряжение на выводе «4» становится близко к нулю, и вывод «4» больше не оказывает влияния на длительность выходных импульсов. Блок питания выходит на свой рабочий режим.
Естественно Вы догадались, что время запуска БП (выхода его на рабочий режим) будет зависеть от величины резистора и конденсатора, и их подбором можно будет регулировать это время.
Ну вот, это кратко вся теория и практика, и ничего здесь особо сложного нет, и если Вы поймёте и разберётесь в работе этого ШИМ-а, то Вам не составит никакого труда разобраться и понять работу других ШИМ-ов.
Шим — контроллеры. Принцип его работы и проверка мультиметром

Когда в какой-нибудь литературе мы встречаем незнакомое слово или понятие, мы хотим скорее узнать его определение. Зная точное определение можно дальше проследить сферу использования и методы применения главного действующего лица того или иного понятия. Сегодня мы ближе познакомимся с таким понятием как шим — контроллер.
Понятие шима
Прежде чем дать определение упомянутому словосочетанию, следует узнать или кому-то просто напомнить себе принцип нагревания силовых компонентов радиосхемы. Их сущность заключается в действии нескольких переключательных режимах. Все электросиловые компоненты в подобных радиосхемах всегда пребывают в двух состояниях. Первое — это открытое, а второе раскрытое. В чём разница между этими двумя состояниями? В первом случае компонент обладает нулевым током. Во втором же у компонента нулевое значение напряжения. Конечным результатом взаимодействия электросиловых компонентов с необходимой напряжённостью можно считать получения сигнала той формы, которая нужна согласно установленным правилам.
Шимом же называют специальный модулятор, предназначенный для контролирования времени открытия силового ключа. Время для открытия ключа устанавливается с учётом получаемого напряжения. Получить идеальный вариант сигнала возможно лишь в том случае, если перед преобразованием сигнал без затруднений прошёл все необходимые этапы. Какие это этапы из чего состоит формирование такого сигнала.
Особенности шим — контроллера

Сам процесс создания шим — сигналов очень непростой. Чтобы облегчить этот процесс, были придуманные специальные микросхемы. Именно микросхемы, участвующие в формировании шим — сигналов называют шим — контролёрами. Их существование в большинстве случаев помогает полностью решить проблему с формированием широко — импульсных сигналов. Чтобы легче понять миссию и значимость шим — контролёра, необходимо познакомиться с особенностями его строения. На сегодняшний день известно, что любой шим — контролёр, активно использующийся в электронике, обладает следующими составляющими:
- Вывод питания. Несёт большую ответственность за электрическое питание всех существующих схем. Нередко вывод питания путают с выводом контроля питания. Важно знать, что несмотря на похожие слова в названии, эти два понятия имеют совершенно разную характеристику. Это ещё раз наглядно докажет знакомство с выводом контроля питания.
- Вывод контроля питания. Эта составляющая часть микросхемы следит за состоянием показателей напряжения прямо на выводе микросхемы. Главная задача вывода контроля питания — это не допустить превышение расчётной отметки. Существует одна серьёзная опасность, а именно снижения напряжения на выходе. Если напряжения снижено, транзисторы начинают открываться наполовину. Из-за неполного открытия они быстро нагреваются и в конечном счёте могут быстро выйти из строя. Поэтому умеренное напряжение — это залог долгой работы транзисторов микросхемы шим — контроллеров.
- общий выход. Третий главный элемент схемы имеет форму ножки. Эта ножка, в свою очередь, подключена к общему проводу схемы, которые отвечает за питания всей системы.
Все три составляющих очень важны. Если хотя бы один из элементов по какой-то причине выходит из строя, работа всей микросхемы заметно ухудшается или совершенно прекращается.
Системы управления микросхемами
Важно знать не только из чего состоят микросхемы шим — контроллеров, но и какие существуют виды самих систем. В настоящее время доступно две основных системы широко — импульсной модуляции в которых шим — контроль принимает активное участие. Вот их некоторые особенности:

- Цифровая система. В цифровой шим — системе все существующие процессы описываются цифровыми данными. Так на выходе в цифровом формате формируется показатель уровня напряжения. Заметим, что уровень напряжения может быть высокий (измеряется как 100%) и низкий (0%). Однако показатели напряжения, благодаря современным технологиям, можно изменять. Как? Необходимо изменить скважность импульсов. Только тогда изменится и напряжение. Любые совершенные перемены имеют свою частоту. Именно шим — контролёры регулируют описанные процессы. С их помощью вся система будет успешно работать. Эта специальная микросхема по праву называется сердцем всей цифровой системы шим — модуляторов.
А вот получить на выходе нужный сигнал можно как с программным, так и аппаратным методом.
Аппаратный метод. Получение сигнала этим способом происходит с помощью специального таймера, который изначально встроен в цифровую систему. Такой таймер генерирует или способствует включению импульсов на определённых этапах вывода сигнала.
Программный метод. В этом случае получения сигналов происходит посредством выполнения специальных программных команд. У программного способа больше возможностей, нежели у аппаратного. В то же время использования этого метода получения сигналов может занять много памяти.
А что можно сказать о «сердце системы». У шима — контролёра, который активно применяется в цифровых модуляторах есть свои преимущества. Стоит помнить о следующих:
- Низкая стоимость.
- Стабильная работа.
- Высокая надёжность.
- Возможность экономить энергию.
- высокая эффективность преобразования сигналов.

Все перечисленные преимущества делают цифровую систему более востребованной среди потребителей.
- Аналоговый модулятор. Принцип работы аналогового модулятора в корне отличается от принципа работы цифрового Вся суть работы такого модулятора состоит в сравнении двух сигналов. Эти сигналы отличаются между собой порядком частоты. Операционный усилитель — это главный элемент аналогового модулятора, который отвечает за сравнение сигналов. Сравнение сигналов осуществляется на выходе. В качестве сравнения усилитель используется два сигнала. Первый — пилообразное напряжение высокой частоты. Второй сигнал — низкочастотное напряжение. После сравнения на свет появляются импульсы прямоугольной формы. Длительность импульсов напрямую зависят от модулирующего сигнала.
Шим — контроллер в импульсных блоках питания
Многие электрические приборы сегодня оснащены специальными блоками питания. Эти блоки помогают преобразить один вид напряжения в другой. В процессе преобразования энергии принимают участия два устройства:
- Импульсный блок питания.
- аналоговые трансформаторные устройства.
В этой статье мы больше внимания обратим на первое устройство, так как именно в нём используется шим — контролёр.
Схема работы импульсного блока питания
Это устройство появилось на свет всего лишь несколько десятилетий назад. Однако уже успело стать популярным и востребованным. Импульсный блок питания состоит из следующих деталей:
- Фильтрующего конденсата.
- Ключевого силового транзистора.
- Сетевого выпрямителя, состоящего из нескольких элементов.
- Выпрямительных диодов выходной системы.
- Силовой дроссели. Дроссель помогает корректировать возникающее напряжение.
- Импульсивного источника питания. Именно отсюда напряжение преобразовывается в силовую цепь.
- Цепей управления выходного напряжения.
- Накопительной фильтрующей ёмкости;
- Оптопара;
- Задающего генератора.
- схемы обратной связи.
Зная состав импульсного блока, следует ознакомиться с принципом его работы.
Принцип работы импульсного блока

Принцип работы импульсного блока заключается в выдаче стабилизированного питающего напряжения на основе принципа взаимодействия элементов инертной системы. Вот поэтапные шаги, наглядно демонстрирующие всю суть деятельности такого блока питания:
- Передача сетевого напряжения на выпрямитель (осуществляется при помощи специальных проводов).
- С помощью фильтра выпрямителя происходит сглаживание напряжения. В этом процессе принимают участие и конденсаторы.
- с помощь диодного входного моста выпрямляются синусоиды. Далее при участии транзисторной системы проходящие синусоиды должны преобразоваться в высокочастотные импульсы. Зачастую импульсы имеют прямоугольную форму.
Но возникает вопрос, какую роль в импульсном блоке играют шим — контролёры. Мы постараемся дать ответ на него в следующем подзаголовке.
Роль шима — контроллера в работе импульсного блока

Шим — контроллеры играют важную роль в импульсном блоке. Он отвечает за процессы, связанные с широтно — импульсной модуляцией. Шим — контролёр способствует выработке импульсов, у которых одинаковая частота, но в то же время разная длительность включения. Все подаваемые импульсы соответствуют определённой логической единице. У импульсов одинаковая не только частота, но и одинаковая величина амплитуды. Продолжительность функционирования логической единицы может меняться в процессе её работы. Такие перемены помогают наилучшим образом управлять работой электронной системы.
Таким образом, шим — контролёр — одна из важных цепочек, участвующих в работе импульсного блока. В некоторых видах помимо шим — контролёра благополучное функционирование блока питания обеспечивает импульсный трансформатор и специальный каскад силовых ключей.
А в каких сферах используются импульсные блоки питания? В первую очередь, в электронике. Об этом речь пойдёт далее.
Особенности работы микросхемы или как может работать ноутбук
Компьютерный блок питания и роль шим — контролёра в нём Все современные компьютеры, в том числе и ноутбуки, оснащены импульсными блоками питания. Установленные в ноутбуке или в обычном компьютере блоки содержат индивидуальную микросхему шим — контролёра. Стандартной микросхемой считают микросхему TL494CN.
Прежде всего стоит сказать о главной задаче микросхемы TL494CN. Итак, главной задачей схемы является широтно — импульсная модуляция. Другими словами микросхема вырабатывает импульсы напряжения. Одни импульсы регулируемы, другие нет. В микросхеме предусмотренно примерно 6 способов выводов сигналов. Упомянем некоторые интересные подробности каждого вывода микросхемы ноутбука.

Первый вывод. Считается положительным входом усилителя сигнала ошибки. Уровень напряжения на первом выводе оказывает значительное влияние на функционирование последующих выводов. При низком напряжении при втором выводе у выхода усилителя ошибки будут низкие показатели. И напротив, при повышенном напряжении показатели усилителя ошибки повысятся.
Второй вывод. Второй же вывод является напротив отрицательным выходом для усилителя. Здесь показатели напряжения немного по-иному оказывают своё влияние на усилитель. Так, при высоком напряжении (выше чем на первом выводе) у выхода усилителя низкие показатели. В случае низкого напряжения усилитель обладает высокими данными.
Третий вывод. Служит неким контактным звеном. Перемены в уровне напряжения зависят от двух диодов, которыми наделен внутренний усилитель. Во время изменения уровня сигнала хотя бы на одном диоде меняется уровень напряжения всего усилителя. В некоторых случаях третий вывод обеспечивает скорость изменения ширины импульсов.
Четвёртый вывод. Способен управлять диапазон скважности всех выходных импульсов. Уровень поступаемого напряжения в четвёртом выводе влияет на ширину импульсов в микросхеме шим — контролёра.
Пятый вывод. Перед пятым выводом стоит немного другая задача. Он присоединяет врямязадующий конденсатор к заданной микросхеме. Ёмкость присоединённого конденсата оказывает значительное влияние на частоту выходных импульсов шим — контролёра.
Шестой вывод. Служит для подключения времязадающего регистра, который также влияет на частоту.
Все эти шесть выводов способствуют выполнению главной задачи, которая поставлена перед микросхемой шим — контролёра — выход импульсов с широкой модуляцией. А это действие, в свою очередь, влияет на работу импульсного блока, а значит и на работу ноутбука.
Если шим — контролёр выходит из строя
Временами шим — контролёры их схемы и источник питания (в том числе и встроенные в ноутбук) могут ломаться и выходить из строя. В таких случаях понадобится выявить неисправности (в одних случаях проверять необходимо источник питания, в других проверять стоит саму схему). Для этой цели были разработаны мультиметры. Мультиметры тщательно исследуют работоспособность шим — контролёров и при необходимости помогают устранить неисправности. Самыми распространёнными причинами, почему следует проверять эти устройства, считают нестабильную работу платы и изменения показателей напряжения. Если их устранить, техника будет работать.
ШИМ-контроллер: схема, принцип работы, управление
Один из используемых подходов, позволяющих существенно сократить потери на нагревании силовых компонентов радиосхем, представляет собой использование переключательных режимов работы установок. При подобных системах электросиловой компонент или раскрыт — в это время на нем наблюдается фактически нулевое падение напряжения, или открыт — в это время на него подается нулевой ток. Рассеиваемую мощность можно вычислить, перемножив показатели силы тока и напряжения. В этом режиме получается достичь коэффициента полезного действия около 75-80% и более.
Что такое ШИМ?
Для получения на выходе сигнала требуемой формы силовой ключ должен открываться всего лишь на определенное время, пропорциональное вычисленным показателям выходного напряжения. В этом и заключается принцип широтно-импульсной модуляции (ШИМ, PWM). Далее сигнал такой формы, состоящий из импульсов, разнящихся по своей ширине, поступает в область фильтра на основе дросселя и конденсатора. После преобразования на выходе будет практически идеальный сигнал требуемой формы.
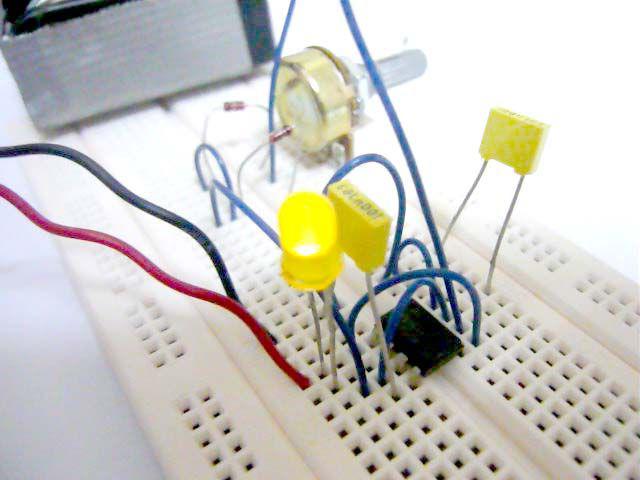
Область применения ШИМ не ограничивается импульсными источниками питания, стабилизаторами и преобразователями напряжения. Использование данного принципа при проектировании мощного усилителя звуковой частоты дает возможность существенно снизить потребление устройством электроэнергии, приводит к миниатюризации схемы и оптимизирует систему теплоотдачи. К недостаткам можно причислить посредственное качество сигнала на выходе.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
- Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
- Вывод питания (VC). Отвечает за электропитание схемы. Важно не спутать его с соседом с похожим названием — выводом VCC.
- Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми). В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
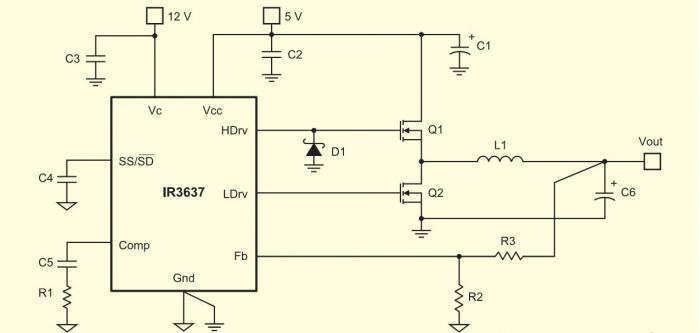
Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор — исток» и «затвор — сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Для контроля над биполярным транзистором двухтактный каскад не используется, так как управление осуществляется с помощью тока, а не напряжения. Для закрытия биполярного транзистора достаточно всего лишь прекратить протекание тока через базу. При этом замыкание базы на общий провод необязательно.
Ещё о функциях контроллеров ШИМ
Задумав спроектировать контроллер ШИМ своими руками, необходимо как следует продумать все детали его реализации. Только так можно создать работающее устройство. Кроме вышеуказанных выходов, работа ШИМ-контроллера подразумевает наличие следующих функций:
- Опорное напряжение (VREF). Фабричные изделия для удобства обычно дополняются функцией выработки стабильного опорного напряжения. Специалисты заводов-изготовителей рекомендуют соединять данный вывод с общим проводом через емкость не менее 1 мкФ для повышения качества и возможности стабилизации опорного напряжения.
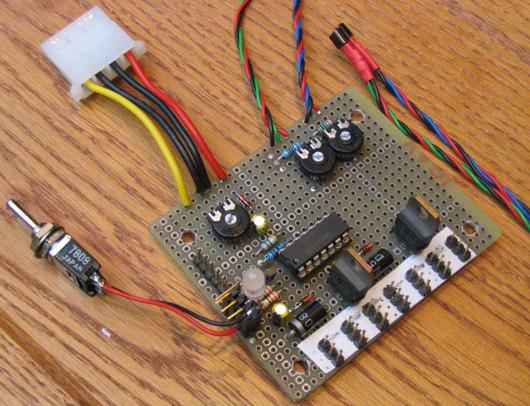
- Ограничение тока (ILIM). Если показатели напряжения на данном выводе существенно превышают установленное (как правило, около 1 В), то контроллер автоматически закрывает силовые ключи. В случаях, когда показатель напряжения превышает второе пороговое значение (в пределах 1,5-2 В), устройство тут же обнуляет напряжение на подключении к мягкому старту.
- Мягкий старт (SS). Показатель напряжения на данном выходе определяет максимально допустимую ширину будущих модулируемых импульсов. На данный вывод подает ток установленной величины. Если между ним и всеобщим кабелем вмонтировать дополнительную емкость, то она будет медленно, но уверенно заряжаться, что приведет к постепенному расширению каждого импульса от минимума вплоть до окончательного расчетного значения. Благодаря этому можно обеспечить плавное, а не стремительное нарастание величин тока и напряжения в общей схеме устройства, благодаря чему такая система и заслужила свое название «мягкий старт». При этом, если специально ввести ограничение по напряжению на данном выводе, допустим, подключив делитель напряжения и систему диодов, можно и вовсе ограничить превышение импульсами некоего задаваемого значения ширины.
Частота работы устройств, синхронизация
Микросхемы ШИМ-контроллеров могут применяться для различных целей. Чтобы отладить их совместную работу с другими элементами устройства, следует разобраться, как устанавливать те или иные параметры работы контроллера и какие компоненты цепи за это отвечают.
- Резистор и емкость, задающие частоту работы всего устройства (RT, CT). Каждый контроллер может работать лишь на определенно заданной частоте. Каждый из импульсов следует лишь с этой частотой. Устройство может менять длительность импульсов, их форму и протяженность, но только не частоту. На практике это означает, что чем меньше протяженность импульса, тем длительнее пауза между ним и следующим. При этом частота следования всегда неизменна. Емкость, подключенная между ножкой CT и общим кабелем, и резистор, подключенный к выходу RT и общему кабелю, в комбинации могут задавать частоту, на которой будет работать контроллер.
- Синхроимпульсы (CLOCK). Весьма распространены случаи, в которых требуется отладить работу нескольких контроллеров так, чтобы выходные сигналы формировались синхронно. Для этого к одному из контроллеров (как правило, ведущему) требуется подключить частотозадающие емкость и резистор. На выходе CLOCK контроллера сразу же появятся короткие импульсы, соответствующие напряжению, которые подаются на аналогичные выходы всей группы устройств. Их принято называть ведомыми. Выводы RT таких контроллеров следует объединить с ножками VREF, а CT — с общим кабелем.
- Напряжение сравнения (RAMP). На этот вывод следует подавать сигнал пилообразной формы (напряжение). При возникновении синхроимпульса на выходе устройства образуется открывающее контрольное напряжение. После того как показатель напряжения на RAMP становится больше в несколько раз, чем величина выходного напряжения на усилителе ошибки, на выходе можно наблюдать импульсы, отвечающие закрывающему напряжению. Длительность импульса может рассчитывать от момента возникновения синхроимпульса вплоть до момента многократного превышения показателя напряжения на RAMP над величиной выходного напряжения усилителя ошибки.
ШИМ-контроллеры в составе блоков питания
Блок питания является неотъемлемым элементом большинства современных девайсов. Срок его эксплуатации практически ничем не ограничен, но от его исправности во многом зависит безопасность работы подконтрольного устройства. Спроектировать блок питания можно и своими руками, изучив принцип его действия. Основная цель – формирование нужной величины напряжения питания, обеспечение её стабильности. Для большинства мощных устройств гальванической развязки, основанной на действии трансформатора, будет недостаточно, да и подобранный элемент явно удивит пользователей своими габаритами.

Увеличение частоты тока питания позволяет существенно уменьшить размеры используемых компонентов, что обеспечивает популярность блоков питания, работающих на частотных преобразователях. Один из самых простых вариантов реализации питающих элементов – блок-схема, состоящая из прямого и обратного преобразователей, генератора и трансформатора. Несмотря на видимую простоту реализации таких схем, на практике они демонстрируют больше недочетов, чем преимуществ. Большинство получаемых показателей стремительно изменяются под влиянием скачков напряжения питания, при загрузке выхода преобразователя и даже при увеличении температуры окружающей среды. ШИМ-контроллеры для блоков питания дают возможность стабилизировать схему, а также воплотить множество дополнительных функций.
Составляющие схемы блоков питания с ШИМ-контроллерами
Типовая схема состоит из генератора импульсов, в основе которого лежит ШИМ-контроллер. Широтно-импульсная модуляция дает возможность собственноручно контролировать амплитуду сигнала на выходе ФНЧ, изменяя при необходимости длительность импульса или его скважность. Сильная сторона ШИМ – высокий КПД усилителей мощности, в особенности звука, что в целом обеспечивает устройствам довольно обширную сферу применения.
ШИМ-контроллеры для блоков питания могут использоваться в схемах с различными мощностями. Для реализации относительно маломощных схем необязательно включать в их состав большое число элементов – в качестве ключа может выступать обычный полевой транзистор.
ШИМ-контроллеры для источников питания большой мощности могут иметь также элементы управления выходным ключом (драйверы). В качестве выходных ключей рекомендуется использовать IGBT-транзисторы.
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу – некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.
Чтобы узнать, как проверить ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже – с вариантами их устранения.
Диагностика неисправностей
Одна из часто встречающихся проблем – пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта – обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует – отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального – проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах – некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков – обрыв петли ООС или цепочки RC, деградация емкости фильтра.
В заключение
Универсальные и многофункциональные ШИМ-контроллеры сейчас можно встретить практически везде. Они служат не только в качестве неотъемлемой составляющей блоков питания большинства современных устройств — типовых компьютеров и других повседневных девайсов. На основе контроллеров разрабатываются новые технологии, позволяющие существенно сократить расход ресурсов во многих отраслях человеческой деятельности. Владельцам частных домов пригодятся контроллеры заряда аккумуляторов от фотоэлектрических батарей, основанные на принципе широтно-импульсной модуляции тока заряда.
Высокий коэффициент полезного действия делает разработку новых устройств, действие которых основывается на принципе ШИМ, весьма перспективной. Вторичные источники питания — вовсе не единственное направление деятельности.
Theoritical considerations for buck mode switching regulators
Carl Nelson, in Analog Circuit Design, 2013
Error Amplifier
The error amplifier in Figure 11 is a single stage design with added inverters to allow the output to swing above and below the common mode input voltage. One side of the amplifier is tied to a trimmed internal reference voltage of 2.21V. The other input is brought out as the FB (feedback) pin. This amplifier has a GM (voltage in to current out) transfer function of ∼5000μmho. Voltage gain is determined by multiplying GM times the total equivalent output loading, consisting of the output resistance of Q4 and Q6 in parallel with the series RC external frequency compensation network. At DC, the external RC is ignored, and with a parallel output impedance for Q4 and Q6 of 400kΩ, voltage gain is ≈2000. At frequencies above a few hertz, voltage gain is determined by the external compensation, RC and CC.

Figure 11. Error Amplifier
AV=Gm2π•f•CCat mid-frequenciesAV=Gm•RCat high frequencies
Phase shift from the FB pin to the VC pin is 90° at mid-frequencies where the external CC is controlling gain, then drops back to 0° (actually 180° since FB is an inverting input) when the reactance of CC is small compared to RC. The low frequency “pole” where the reactance of CC is equal to the output impedance of Q4 and Q6 (r0), is:
FPOLE=12π•r0•Cr0≈400kΩ
Although fPOLE varies as much as 3:1 due to r0 variations, mid-frequency gain is dependent only on GM, which is specified much tighter on the data sheet. The higher frequency “zero” is determined solely by RC and CC:
fZERO=12π•RC•CC
The error amplifier has asymmetrical peak output current. Q3 and Q4 current mirrors are unity gain, but the Q6 mirror has a gain of 1.8 at output null and a gain of 8 when the FB pin is high (Q1 current = 0). This results in a maximum positive output current of 140μA and a maximum negative (sink) output current of =1.1mA. The asymmetry is deliberate—it results in much less regulator output overshoot during rapid start-up or following the release of an output overload. Amplifier offset is kept low by area scaling Q1 and Q2 at 1.8:1.
Amplifier swing is limited by the internal 5.8V supply for positive outputs and by D1 and D2 when the output goes low. Low clamp voltage is approximately one diode drop (−0.7V – 2mV/°C).
Note that both the FB pin and the VC pin have other internal connections. Refer to the frequency shifting and synchronizing discussions.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123978882000055
Linear regulator
Keng C. Wu, in Power Electronic System Design, 2021
8.1.1.1 Open loop
Surrounding the error amplifier and the output feedback divider, R1 and R2, the inverting input node, Vn, and the noninverting node, Vp, voltages are
(8.1)Vn=R2R1+R2Vo+Vos+R1R2R1+R2Ib,Vp=Vref
The error amplifier output therefore gives
(8.2)V2=A(Vp−Vn)=A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)
The base-emitter loop of transistor Q1 gives
(8.3)R3IB1+Vbe1+R4(1+hFE1)IB1=V2,approximationIB1=ISeV2−[R3+(1+hFE1)R4]IB1VT,exact
The exact expression invokes transistor p-n junction saturation current, Is, and thermal voltage, VT.
In other words, the Q1 base current (approximation) is
(8.4)IB1=V2−Vbe1R3+R4(1+hFE1)=A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)−Vbe1R3+R4(1+hFE1)
And the Q2 base current (approximation) is
(8.5)IB2=hFE1IB1−Vbe2R5=hFE1A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)−Vbe1R3+R4(1+hFE1)−Vbe2R5
Clearly, the output voltage is translated to a control current that is responsible for regulating the output given a known reference, Vref. This concludes the first part.
The other part, power train, yields
(8.6)Vo=(R1+R2)RLR1+R2+RLIC2=(R1+R2)RLR1+R2+RLhFE2·IB2Vi=Vce+Vo
where Vce is the collector-to-emitter drop.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780323885423000017
Current-Fed Converter
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
10.5 I-fed converter with digital control
The analog error amplifier identified in Section 10.3, following the modulator gain evaluation, is transformed to the z-domain with a bilinear transformation constant C = 2 MHz (converter switching frequency 100 kHz, sampling frequency 1 MHz, transform constant = twice of sampling). The resulting z-domain digital filter function is in the form of (1.23) with these coefficients,
a0=7.451×10−4a1=−7.337×10−4a2=−7.451×10−4a3=7.338×10−4 b1=−2.959b2=2.919b3=−0.96
Figure 10.7a–d shows the SIMULINK schematic with digital filter and performance in time domain.





Figure 10.7. SIMULINK Schematic with Digital Filter.
(a) Inductor current, (b) secondary current, (c) output voltage, and (d) input current.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000101
Feedback Loop Analysis and Stability
Sanjaya Maniktala, in Switching Power Supplies A — Z (Second Edition), 2012
Pulse-Width Modulator Transfer Function
The output of the error amplifier (sometimes called “COMP,” sometimes “EA-out,” sometimes “control voltage”) is applied to one of the inputs of the PWM comparator. This is the terminal marked “Control” in Figures 12.9 and 12.10. On the other input of this PWM comparator, we apply a sawtooth voltage ramp — either internally generated from the clock when using “voltage-mode control,” or derived from the current ramp when using “current-mode control” (explained later). Thereafter, by standard comparator action, we get pulses of desired width with which to drive the switch.
Since the feedback signal coming from the output rail of the power supply goes to the inverting input of the error amplifier, if the output is below the set regulation level, the output of the error amplifier goes high. This causes the PWM to increase the pulse width (duty cycle) and thus try to make the output voltage rise. Similarly, if the output of the power supply goes above its set value, the error amplifier output goes low, causing the duty cycle to decrease (see upper third of Figure 12.11).
As mentioned previously, the output of the PWM stage is duty cycle, and its input is the “control voltage” or the “EA-out.” So, as we said, the gain of this stage is not a dimensionless quantity, but has units of 1/V. From the middle of Figure 12.11, we can see that this gain is equal to 1/VRAMP, where VRAMP is the peak-to-peak amplitude of the ramp sawtooth.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123865335000127
DCM Boost Converter with Voltage-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
7.6 Conversion to digital control
We now want to convert the analog error amplifier, EA(s), identified in Section 7.4, to its digital equivalent H(z). It turns out that some property not well understood, at least to this author, exists. From the EA(ω) plot in frequency domain, 100 kHz sampling was thought to be a good choice, but it ends up having a frequency response, H(ω), that is utterly incompatible as shown in Figure 7.8, with the analog version.

Figure 7.8. Incompatible Digital Filter Sampled at 100 kHz.
Increasing the sampling frequency to 300 kHz improves matching, Figure 7.9, with losses in high frequency.

Figure 7.9. Improved Matching at 300 kHz Sampling.
Increasing the sampling frequency further to 800 kHz improves more, Figure 7.10, but further increase to 900 kHz makes it worse. We therefore settle for sampling at 800 kHz.

Figure 7.10. Better Matching at High Frequency with 800 kHz Sampling.
At 800 kHz sampling, the polynomial coefficients for the corresponding HII(z), (1.19), is given as,
a0=5.392×10−3a1=38.663×10−6a2=−5.353×10−3 b1=−1.991×10−0b2=991.465×10−3
With the digital filter identified, Figure 7.1 is transformed to its digital control version, Figure 7.11. The digital filter is also proved to be stable, Figure 7.12, with poles within the unit circle of z-plane.

Figure 7.11. Boost Converter with Digital Filter in Feedback Loop.

Figure 7.12. Digital Filter is Stable.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000071
Forward Converter with Voltage-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
1.7 Other approaches and considerations
In the process of converting an analog error amplifier to digital in Section 1.4, the bilinear transform was invoked. The transform is considered valid, based on the fact of acceptable mathematical approximation alone. It does not take into consideration its physical significance. Briefly, in particular the choice of constant C, there were many choices, none perfect. One approach attempts to match both at a single, chosen frequency. In another, the responses of both versions across a low frequency band are made almost equal. Both efforts set an eye on the performance in the frequency domain. There are alternatives, of course, and that is changing the focus to the time domain. One is called impulse invariance method. It implies that the impulse response of a digital filter is forced to be identical to the impulse of its analog counterpart. It is basically a procedural matter that does not require cumbersome theoretical support. We outline only the process here and will give a demonstration later in an example.
Three steps are called for in the impulse invariance method. Step one takes the inverse Laplace transform of the analog compensator function (inverting sign excluded), identified by way of Section 1.3. This yields the time-domain impulse response of the corresponding analog amplifier. Step two takes z-transform of the impulse response function in the time domain. Then the last step follows by arranging the z-domain function in the form of (1.24).
In the analog world, circuit operations and performances are sensitive to the value of components. Digital filters obtained through the above fare even worse by the fact of (1.17), (1.19), (1.20), and (1.23). The performance of a digital filter is extremely sensitive to the coefficients of its numerator and denominator polynomial. Readers are strongly advised to retain coefficients’ numerical precision to at the least 10 decimal places.
The last, but not the least, concern is the local stability of the compensator. Poles of HII(z) in (1.19), HIII(z) in (1.23), or in general, H(z) of (1.24), must lie within the unit circle in the z-plane. We will see to it in the example to follow.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000010
Forward Converter with Current-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
2.5 Matlab SIMULINK simulation
In both Figures 2.1 and 2.2, a type-III error amplifier was employed for demonstration purpose as well as for a 60°-phase margin. It turns out that if the desired phase margin is reduced to 45° at the same crossover frequency of 10 kHz, a type-II error amplifier with two less components can perform just as well for current-mode control. The reader is invited to confirm, with R1a = 2K preselected, C1a = 0.0029 μF, C2a = 0.009 μF, and R2a = 3.6K. In the depictedSIMULINK models, type-II error amplifiers are shown. Figure 2.12 gives a physical device model and Figure 2.12a–h present simulation plots. Figure 2.13 replaces the physical model with continuous transfer function H(s), while Figure 2.14 plugs in the corresponding digital filter.









Figure 2.12. SIMULINK Model with Error Amp Represented by Physical Device.
(a) Output voltage, (b) error voltage, (c) D1 and D2 cathode, (d) input current, (e) switch current, (f) inductor current, (g) D1 current, (h) D2 current.









Figure 2.13. SIMULINK Model with Error Amp in H(s) Form.
(a) Output voltage. (b) error voltage. (c) D1 and D2 cathode. (d) input current. (e) switch current. (f) inductor current. (g) D1 current. (h) D2 current.









Figure 2.14. SIMULINK Model with Error Amp in Hz Form.
(a) Output voltage, (b) error voltage, (c) D1 and D2 cathode, (d) input current. (e) switch current, (f) inductor current, (g) D1 current, (h) D2 current.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000022
Switch-mode DC/DC converters
Keng C. Wu, in Power Electronic System Design, 2021
9.14 Close loop—digital
So far, the key controller; which is the error amplifier identified as, for instance, EA(s) in Fig. 9.66; remains entirely in analog forms using analog integrated circuits and passive RC components. This fact had also held true for decades covering the invention of black/white TV, color TV, audio cassette tape, VCR, etc. and later improvements of those products. Then, perhaps in early 1980s, devices with discrete recording and readout, not digital yet, began to show up. Discrete signal is basically just a sampled, discontinuous staircase approximation of its analog counterpart. While a true digital signal further represents each and every discrete sample in stream of binary 0/1 format including synchronization, identification, data, encryption, action, error correction, etc. With the advance of understanding in digital signal processing starting in early 1970s and mostly limited to post processing, instead of real time, early 1980s also saw some bright minds beginning to probe the possibility of digital filter and control for power converters. However, after almost 40 years, the progress is far from satisfactory. As late as 2017, published material discussing power processing with digital feedback still carried significant misconceptions, or errors.
On Oct. 26, 2017, at the invitation of Electronic Design, Penton Publication (On-Line version), this author published “A Step-by-Step Primer on Digital Power-Supply Design”; [http://www.electronicdesign.com/power/step-step-primer-digital-power-supply-design].
Considering the article length and the standing alone nature, it is included as an appendix; Appendix I.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780323885423000030
LT1070 design manual
Carl Nelson, in Analog Circuit Design, 2011
Feedback pin
The feedback pin is the inverting input to a single stage error amplifier. The noninverting input to this amplifier is internally tied to a 1.244V reference as shown in Figure 5.4.

Figure 5.4.
Input bias current of the amplifier is typically 350nA with the output of the amplifier in its linear region. The amplifier is a gm type, meaning that it has high output impedance with controlled voltage-to-current gain (gm ≈ 4400μmhos). DC voltage gain with no load is ≈ 800.
The feedback pin has a second function; it is used to program the LT1070 for normal or flyback-regulated operation (see description of block diagram). In Figure 5.4, Q53 is biased with a base voltage approximately 1V. This clamps the feedback pin to about 0.4V when current is drawn out of the pin. A current of ≈10μA or higher through Q53 forces the regulator to switch from normal operation to flyback mode, but this threshold current can vary from 3μA to 30μA. The LT1070 is in flyback mode during normal start-up until the feedback pin rises above 0.45V. The resistor divider used to set output voltage will draw current out of the feedback pin until the output voltage is up to about 33% of its regulated value.
If it is desired to run the LT1070 in the fully isolated flyback mode, a single resistor is tied from the feedback pin to ground. The feedback pin then sits at a voltage of ≈ 0.4V for R = 8.2k. The actual voltage depends on resistor value since the feedback pin has about 200Ω output impedance in this mode. 500μA in the resistor will drop the feedback pin voltage from 0.4V to 0.3V. Minimum current through the resistor to guarantee flyback operation is 50μA. Actual resistor value is chosen to fine-trim flyback regulated voltage. (See discussion of isolated flyback mode operation and graphs of feedback pin characteristics.)
An internal 30Ω resistor and 5.6V Zener protect the feedback pin from overvoltage stress. Maximum transient voltage is ±15V. This high transient condition most commonly occurs during fast fall time output shorts if a feedforward capacitor is used around the feedback divider. If a feedforward capacitor is used for DC output voltages greater than 15V, a resistor equal to VOUT/20mA should be used between the divider node and the feedback pin as shown in Figure 5.5.

Figure 5.5.
Keep in mind when using the LT1070 that the feedback pin reference voltage is referred to the ground pin of the regulator, and the ground pin can have switch currents exceeding 5A. Any resistance in the ground pin connection will degrade load regulation. Best regulation is obtained by tying the grounded end of the feedback divider directly to the ground pin of the LT1070, as a separate connection from the power ground. This limits output voltage errors to just the drop across the ground pin resistance instead of multiplying it by the feedback divider ratio. See discussion of ground pin.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123851857000056
Space Interference
Reinaldo Perez, in Wireless Communications Design Handbook, 1998
4.6.7.2 Transient Effects in SMPSs
In the simplified circuit of a switching-mode power supply, an error amplifier compares output voltage Vout with a reference Vref and controls the duty cycle, D, via a pulse width modulator as shown in Figure 4.32. The output capacitor Cout is represented by its equivalent circuit that includes the equivalent series resistance (ESR) and the equivalent series inductance (ESL). When we have a load step δI, current through the choke inductance L cannot be instantly changed. There will always be a finite time t needed for L to accommodate δI, given by the expression

Figure 4.32. Simplified diagram of an SMPS with output capacitor model (ESR & ESL).
(4.10)t>LδIVinDmax−Vout−Vdiode,
where Dmax is the maximum duty cycle and Vdiode is the diode’s voltage drop. The choke current Ichoke slews to the new load current, but before it does that Iload flows through Cout. This results in an output voltage deviation δVout that may be as much as
(4.11)δVout≤ESLdIloaddt+ESRδI,
where dIload/dt is the load’s current slew rate (A/sec).The SMPS’s Cout acts as a reservoir for these current transients. The delay that is observed is compounded by the wiring and possible long traces in the PCB. As can be observed in Figure 4.32, traces have self-inductances and resistances, and when Iload changes from Faraday’s law, Lwire/trace will cause an initial voltage deviation δV given by
(4.12)δV=−Lwire/tracesdIloaddt.
Furthermore, Rwire/trace will cause an input voltage drop as Iload slews. The time that is needed to change a current through load wires/traces in a PCB is given by
(4.13)t=tdelay+trise,
where tdelay is the SMPS delay time and trise is the time needed for Iwire/traces to catch up to the load current, given by
(4.14)trise=tdelaydIload/dtVmax−VloadLwire/trace−dIloaddt
where Vmax is the maximum output voltage during the transient recovery of the supply. The output load will experience a dip of as much as
(4.15)δVout=ESRtdIloaddt+t2dIload/dtCload.
A computer simulation of a circuit of the type shown in Figure 4.32 using SPICE can show the effects of load wire/traces, inductances, and external capacitance, as shown in Figure 4.33.

Figure 4.33. Load transients resulting from modeling output loads of an SMPS.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/S1874610199800179
Theoritical considerations for buck mode switching regulators
Carl Nelson, in Analog Circuit Design, 2013
Error Amplifier
The error amplifier in Figure 11 is a single stage design with added inverters to allow the output to swing above and below the common mode input voltage. One side of the amplifier is tied to a trimmed internal reference voltage of 2.21V. The other input is brought out as the FB (feedback) pin. This amplifier has a GM (voltage in to current out) transfer function of ∼5000μmho. Voltage gain is determined by multiplying GM times the total equivalent output loading, consisting of the output resistance of Q4 and Q6 in parallel with the series RC external frequency compensation network. At DC, the external RC is ignored, and with a parallel output impedance for Q4 and Q6 of 400kΩ, voltage gain is ≈2000. At frequencies above a few hertz, voltage gain is determined by the external compensation, RC and CC.
Figure 11. Error Amplifier
AV=Gm2π•f•CCat mid-frequenciesAV=Gm•RCat high frequencies
Phase shift from the FB pin to the VC pin is 90° at mid-frequencies where the external CC is controlling gain, then drops back to 0° (actually 180° since FB is an inverting input) when the reactance of CC is small compared to RC. The low frequency “pole” where the reactance of CC is equal to the output impedance of Q4 and Q6 (r0), is:
FPOLE=12π•r0•Cr0≈400kΩ
Although fPOLE varies as much as 3:1 due to r0 variations, mid-frequency gain is dependent only on GM, which is specified much tighter on the data sheet. The higher frequency “zero” is determined solely by RC and CC:
fZERO=12π•RC•CC
The error amplifier has asymmetrical peak output current. Q3 and Q4 current mirrors are unity gain, but the Q6 mirror has a gain of 1.8 at output null and a gain of 8 when the FB pin is high (Q1 current = 0). This results in a maximum positive output current of 140μA and a maximum negative (sink) output current of =1.1mA. The asymmetry is deliberate—it results in much less regulator output overshoot during rapid start-up or following the release of an output overload. Amplifier offset is kept low by area scaling Q1 and Q2 at 1.8:1.
Amplifier swing is limited by the internal 5.8V supply for positive outputs and by D1 and D2 when the output goes low. Low clamp voltage is approximately one diode drop (−0.7V – 2mV/°C).
Note that both the FB pin and the VC pin have other internal connections. Refer to the frequency shifting and synchronizing discussions.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123978882000055
Linear regulator
Keng C. Wu, in Power Electronic System Design, 2021
8.1.1.1 Open loop
Surrounding the error amplifier and the output feedback divider, R1 and R2, the inverting input node, Vn, and the noninverting node, Vp, voltages are
(8.1)Vn=R2R1+R2Vo+Vos+R1R2R1+R2Ib,Vp=Vref
The error amplifier output therefore gives
(8.2)V2=A(Vp−Vn)=A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)
The base-emitter loop of transistor Q1 gives
(8.3)R3IB1+Vbe1+R4(1+hFE1)IB1=V2,approximationIB1=ISeV2−[R3+(1+hFE1)R4]IB1VT,exact
The exact expression invokes transistor p-n junction saturation current, Is, and thermal voltage, VT.
In other words, the Q1 base current (approximation) is
(8.4)IB1=V2−Vbe1R3+R4(1+hFE1)=A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)−Vbe1R3+R4(1+hFE1)
And the Q2 base current (approximation) is
(8.5)IB2=hFE1IB1−Vbe2R5=hFE1A(Vref−R2R1+R2Vo−Vos−R1R2R1+R2Ib)−Vbe1R3+R4(1+hFE1)−Vbe2R5
Clearly, the output voltage is translated to a control current that is responsible for regulating the output given a known reference, Vref. This concludes the first part.
The other part, power train, yields
(8.6)Vo=(R1+R2)RLR1+R2+RLIC2=(R1+R2)RLR1+R2+RLhFE2·IB2Vi=Vce+Vo
where Vce is the collector-to-emitter drop.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780323885423000017
Current-Fed Converter
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
10.5 I-fed converter with digital control
The analog error amplifier identified in Section 10.3, following the modulator gain evaluation, is transformed to the z-domain with a bilinear transformation constant C = 2 MHz (converter switching frequency 100 kHz, sampling frequency 1 MHz, transform constant = twice of sampling). The resulting z-domain digital filter function is in the form of (1.23) with these coefficients,
a0=7.451×10−4a1=−7.337×10−4a2=−7.451×10−4a3=7.338×10−4 b1=−2.959b2=2.919b3=−0.96
Figure 10.7a–d shows the SIMULINK schematic with digital filter and performance in time domain.
Figure 10.7. SIMULINK Schematic with Digital Filter.
(a) Inductor current, (b) secondary current, (c) output voltage, and (d) input current.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000101
Feedback Loop Analysis and Stability
Sanjaya Maniktala, in Switching Power Supplies A — Z (Second Edition), 2012
Pulse-Width Modulator Transfer Function
The output of the error amplifier (sometimes called “COMP,” sometimes “EA-out,” sometimes “control voltage”) is applied to one of the inputs of the PWM comparator. This is the terminal marked “Control” in Figures 12.9 and 12.10. On the other input of this PWM comparator, we apply a sawtooth voltage ramp — either internally generated from the clock when using “voltage-mode control,” or derived from the current ramp when using “current-mode control” (explained later). Thereafter, by standard comparator action, we get pulses of desired width with which to drive the switch.
Since the feedback signal coming from the output rail of the power supply goes to the inverting input of the error amplifier, if the output is below the set regulation level, the output of the error amplifier goes high. This causes the PWM to increase the pulse width (duty cycle) and thus try to make the output voltage rise. Similarly, if the output of the power supply goes above its set value, the error amplifier output goes low, causing the duty cycle to decrease (see upper third of Figure 12.11).
As mentioned previously, the output of the PWM stage is duty cycle, and its input is the “control voltage” or the “EA-out.” So, as we said, the gain of this stage is not a dimensionless quantity, but has units of 1/V. From the middle of Figure 12.11, we can see that this gain is equal to 1/VRAMP, where VRAMP is the peak-to-peak amplitude of the ramp sawtooth.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123865335000127
DCM Boost Converter with Voltage-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
7.6 Conversion to digital control
We now want to convert the analog error amplifier, EA(s), identified in Section 7.4, to its digital equivalent H(z). It turns out that some property not well understood, at least to this author, exists. From the EA(ω) plot in frequency domain, 100 kHz sampling was thought to be a good choice, but it ends up having a frequency response, H(ω), that is utterly incompatible as shown in Figure 7.8, with the analog version.
Figure 7.8. Incompatible Digital Filter Sampled at 100 kHz.
Increasing the sampling frequency to 300 kHz improves matching, Figure 7.9, with losses in high frequency.
Figure 7.9. Improved Matching at 300 kHz Sampling.
Increasing the sampling frequency further to 800 kHz improves more, Figure 7.10, but further increase to 900 kHz makes it worse. We therefore settle for sampling at 800 kHz.
Figure 7.10. Better Matching at High Frequency with 800 kHz Sampling.
At 800 kHz sampling, the polynomial coefficients for the corresponding HII(z), (1.19), is given as,
a0=5.392×10−3a1=38.663×10−6a2=−5.353×10−3 b1=−1.991×10−0b2=991.465×10−3
With the digital filter identified, Figure 7.1 is transformed to its digital control version, Figure 7.11. The digital filter is also proved to be stable, Figure 7.12, with poles within the unit circle of z-plane.
Figure 7.11. Boost Converter with Digital Filter in Feedback Loop.
Figure 7.12. Digital Filter is Stable.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000071
Forward Converter with Voltage-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
1.7 Other approaches and considerations
In the process of converting an analog error amplifier to digital in Section 1.4, the bilinear transform was invoked. The transform is considered valid, based on the fact of acceptable mathematical approximation alone. It does not take into consideration its physical significance. Briefly, in particular the choice of constant C, there were many choices, none perfect. One approach attempts to match both at a single, chosen frequency. In another, the responses of both versions across a low frequency band are made almost equal. Both efforts set an eye on the performance in the frequency domain. There are alternatives, of course, and that is changing the focus to the time domain. One is called impulse invariance method. It implies that the impulse response of a digital filter is forced to be identical to the impulse of its analog counterpart. It is basically a procedural matter that does not require cumbersome theoretical support. We outline only the process here and will give a demonstration later in an example.
Three steps are called for in the impulse invariance method. Step one takes the inverse Laplace transform of the analog compensator function (inverting sign excluded), identified by way of Section 1.3. This yields the time-domain impulse response of the corresponding analog amplifier. Step two takes z-transform of the impulse response function in the time domain. Then the last step follows by arranging the z-domain function in the form of (1.24).
In the analog world, circuit operations and performances are sensitive to the value of components. Digital filters obtained through the above fare even worse by the fact of (1.17), (1.19), (1.20), and (1.23). The performance of a digital filter is extremely sensitive to the coefficients of its numerator and denominator polynomial. Readers are strongly advised to retain coefficients’ numerical precision to at the least 10 decimal places.
The last, but not the least, concern is the local stability of the compensator. Poles of HII(z) in (1.19), HIII(z) in (1.23), or in general, H(z) of (1.24), must lie within the unit circle in the z-plane. We will see to it in the example to follow.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000010
Forward Converter with Current-Mode Control
Keng Wu, in Power Converters with Digital Filter Feedback Control, 2016
2.5 Matlab SIMULINK simulation
In both Figures 2.1 and 2.2, a type-III error amplifier was employed for demonstration purpose as well as for a 60°-phase margin. It turns out that if the desired phase margin is reduced to 45° at the same crossover frequency of 10 kHz, a type-II error amplifier with two less components can perform just as well for current-mode control. The reader is invited to confirm, with R1a = 2K preselected, C1a = 0.0029 μF, C2a = 0.009 μF, and R2a = 3.6K. In the depictedSIMULINK models, type-II error amplifiers are shown. Figure 2.12 gives a physical device model and Figure 2.12a–h present simulation plots. Figure 2.13 replaces the physical model with continuous transfer function H(s), while Figure 2.14 plugs in the corresponding digital filter.
Figure 2.12. SIMULINK Model with Error Amp Represented by Physical Device.
(a) Output voltage, (b) error voltage, (c) D1 and D2 cathode, (d) input current, (e) switch current, (f) inductor current, (g) D1 current, (h) D2 current.
Figure 2.13. SIMULINK Model with Error Amp in H(s) Form.
(a) Output voltage. (b) error voltage. (c) D1 and D2 cathode. (d) input current. (e) switch current. (f) inductor current. (g) D1 current. (h) D2 current.
Figure 2.14. SIMULINK Model with Error Amp in Hz Form.
(a) Output voltage, (b) error voltage, (c) D1 and D2 cathode, (d) input current. (e) switch current, (f) inductor current, (g) D1 current, (h) D2 current.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780128042984000022
Switch-mode DC/DC converters
Keng C. Wu, in Power Electronic System Design, 2021
9.14 Close loop—digital
So far, the key controller; which is the error amplifier identified as, for instance, EA(s) in Fig. 9.66; remains entirely in analog forms using analog integrated circuits and passive RC components. This fact had also held true for decades covering the invention of black/white TV, color TV, audio cassette tape, VCR, etc. and later improvements of those products. Then, perhaps in early 1980s, devices with discrete recording and readout, not digital yet, began to show up. Discrete signal is basically just a sampled, discontinuous staircase approximation of its analog counterpart. While a true digital signal further represents each and every discrete sample in stream of binary 0/1 format including synchronization, identification, data, encryption, action, error correction, etc. With the advance of understanding in digital signal processing starting in early 1970s and mostly limited to post processing, instead of real time, early 1980s also saw some bright minds beginning to probe the possibility of digital filter and control for power converters. However, after almost 40 years, the progress is far from satisfactory. As late as 2017, published material discussing power processing with digital feedback still carried significant misconceptions, or errors.
On Oct. 26, 2017, at the invitation of Electronic Design, Penton Publication (On-Line version), this author published “A Step-by-Step Primer on Digital Power-Supply Design”; [http://www.electronicdesign.com/power/step-step-primer-digital-power-supply-design].
Considering the article length and the standing alone nature, it is included as an appendix; Appendix I.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780323885423000030
LT1070 design manual
Carl Nelson, in Analog Circuit Design, 2011
Feedback pin
The feedback pin is the inverting input to a single stage error amplifier. The noninverting input to this amplifier is internally tied to a 1.244V reference as shown in Figure 5.4.
Figure 5.4.
Input bias current of the amplifier is typically 350nA with the output of the amplifier in its linear region. The amplifier is a gm type, meaning that it has high output impedance with controlled voltage-to-current gain (gm ≈ 4400μmhos). DC voltage gain with no load is ≈ 800.
The feedback pin has a second function; it is used to program the LT1070 for normal or flyback-regulated operation (see description of block diagram). In Figure 5.4, Q53 is biased with a base voltage approximately 1V. This clamps the feedback pin to about 0.4V when current is drawn out of the pin. A current of ≈10μA or higher through Q53 forces the regulator to switch from normal operation to flyback mode, but this threshold current can vary from 3μA to 30μA. The LT1070 is in flyback mode during normal start-up until the feedback pin rises above 0.45V. The resistor divider used to set output voltage will draw current out of the feedback pin until the output voltage is up to about 33% of its regulated value.
If it is desired to run the LT1070 in the fully isolated flyback mode, a single resistor is tied from the feedback pin to ground. The feedback pin then sits at a voltage of ≈ 0.4V for R = 8.2k. The actual voltage depends on resistor value since the feedback pin has about 200Ω output impedance in this mode. 500μA in the resistor will drop the feedback pin voltage from 0.4V to 0.3V. Minimum current through the resistor to guarantee flyback operation is 50μA. Actual resistor value is chosen to fine-trim flyback regulated voltage. (See discussion of isolated flyback mode operation and graphs of feedback pin characteristics.)
An internal 30Ω resistor and 5.6V Zener protect the feedback pin from overvoltage stress. Maximum transient voltage is ±15V. This high transient condition most commonly occurs during fast fall time output shorts if a feedforward capacitor is used around the feedback divider. If a feedforward capacitor is used for DC output voltages greater than 15V, a resistor equal to VOUT/20mA should be used between the divider node and the feedback pin as shown in Figure 5.5.
Figure 5.5.
Keep in mind when using the LT1070 that the feedback pin reference voltage is referred to the ground pin of the regulator, and the ground pin can have switch currents exceeding 5A. Any resistance in the ground pin connection will degrade load regulation. Best regulation is obtained by tying the grounded end of the feedback divider directly to the ground pin of the LT1070, as a separate connection from the power ground. This limits output voltage errors to just the drop across the ground pin resistance instead of multiplying it by the feedback divider ratio. See discussion of ground pin.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/B9780123851857000056
Space Interference
Reinaldo Perez, in Wireless Communications Design Handbook, 1998
4.6.7.2 Transient Effects in SMPSs
In the simplified circuit of a switching-mode power supply, an error amplifier compares output voltage Vout with a reference Vref and controls the duty cycle, D, via a pulse width modulator as shown in Figure 4.32. The output capacitor Cout is represented by its equivalent circuit that includes the equivalent series resistance (ESR) and the equivalent series inductance (ESL). When we have a load step δI, current through the choke inductance L cannot be instantly changed. There will always be a finite time t needed for L to accommodate δI, given by the expression
Figure 4.32. Simplified diagram of an SMPS with output capacitor model (ESR & ESL).
(4.10)t>LδIVinDmax−Vout−Vdiode,
where Dmax is the maximum duty cycle and Vdiode is the diode’s voltage drop. The choke current Ichoke slews to the new load current, but before it does that Iload flows through Cout. This results in an output voltage deviation δVout that may be as much as
(4.11)δVout≤ESLdIloaddt+ESRδI,
where dIload/dt is the load’s current slew rate (A/sec).The SMPS’s Cout acts as a reservoir for these current transients. The delay that is observed is compounded by the wiring and possible long traces in the PCB. As can be observed in Figure 4.32, traces have self-inductances and resistances, and when Iload changes from Faraday’s law, Lwire/trace will cause an initial voltage deviation δV given by
(4.12)δV=−Lwire/tracesdIloaddt.
Furthermore, Rwire/trace will cause an input voltage drop as Iload slews. The time that is needed to change a current through load wires/traces in a PCB is given by
(4.13)t=tdelay+trise,
where tdelay is the SMPS delay time and trise is the time needed for Iwire/traces to catch up to the load current, given by
(4.14)trise=tdelaydIload/dtVmax−VloadLwire/trace−dIloaddt
where Vmax is the maximum output voltage during the transient recovery of the supply. The output load will experience a dip of as much as
(4.15)δVout=ESRtdIloaddt+t2dIload/dtCload.
A computer simulation of a circuit of the type shown in Figure 4.32 using SPICE can show the effects of load wire/traces, inductances, and external capacitance, as shown in Figure 4.33.
Figure 4.33. Load transients resulting from modeling output loads of an SMPS.
Read full chapter
URL:
https://www.sciencedirect.com/science/article/pii/S1874610199800179
Усилитель — ошибка
Cтраница 1
Усилитель ошибки может входить в контур управления. В этом случае на один из его входов должен быть подан опорный сигнал, а на другой — часть управляемого выходного напряжения. Другой возможный вариант — исключение УО, но только в случае, если имеется возможность измерить сигнал вне микросхемы, усилить его и только затем направить к одному из выводов контроллера. Схема на рис. 22.17 показывает применение микросхемы при ее питании от первичной стороны преобразователя, там же находятся ключи моста и источник входного напряжения. Выходное напряжение преобразователя гальванически не связано с первичной стороной, поэтому для передачи информации о выходном напряжении использован оптрон DA.
[2]
В усилитель ошибки по току поступает задание токового опорного сигнала. Усилитель ошибки по току на другом своем входе воспринимает сигнал о нагрузке преобразователя либо непосредственно, либо через отдельный дифференциальный ОУ. Сказанное поясняется схемой, показанной на рис. 23.11. На схеме DI и D2 — развязывающие диоды, позволяющие подключать сигналы каналов напряжения и тока.
[4]
Используя усилитель ошибки в режиме работы вблизи уровня земли ( делитель для съема выходного напряжения дает малую долю выхода), можно построить высоковольтный стабилизатор, в котором под высоким напряжением будет находиться только проходной транзистор и формирователь, работающий на него. На рис. 6.47 показан принцип построения такой схемы. В данном случае, это стабилизированный источник на напряжение от 100 до 500 В, в котором использованы проходной — МОП-транзистор и формирователь.
[5]
В качестве усилителя ошибки используется операционный усилитель, сравнивающий регулируемую долю выхода с прецизионным эталонным источником 5 В. Остальные компоненты выполняют более тонкую, но необходимую работу. Эта схема является исключением из общего правила, которое гласит, что транзисторные схемы не представляют электрической опасности.
[7]
В качестве усилителя ошибки применен полупроводниковый усилитель, выходной сигнал которого управляет широтным модулятором.
[9]
Выходной сигнал усилителя ошибки по напряжению при рассмотриваемом методе управляет мощностью, доставляемой в нагрузку корректора.
[10]
В этот момент усилитель ошибки прекращает питать базу транзистора VT1 и нерегулируемое входное напряжение отключается. Энергия, запасенная в катушке индуктивности L1, служит причиной возникновения импульса напряжения Ux, имеющего отрицательную полярность. Этот импульс поглощается открытым демпфирующим диодом VDI. Ток индуктивности 1C подается в нагрузку. Когда ток в катушке индуктивности станет ниже уровня тока нагрузки, конденсатор С1 начнет разряжаться и выходное напряжение ( а следовательно, и напряжение на инвертирующем входе усилителя ошибки) уменьшится.
[12]
Дг поступает на усилитель ошибки У3 и далее в фазочувст-вительный детектор ФД, усилитель мощности У, питающий серводвигатель Дв. Последний через самотормозящуюся передачу обеспечивает вращение коронного колеса, компенсируя дополнительные ( из-за погрешностей кинематической цепи) повороты сателлита.
[13]
Назначение выводов: 1 — усилитель ошибки; 2-датчик тока; 3-компаратор недонапряжения; 4 — общий; 5-выход драйвера; 6-напряжение питания; 7-главный пуск; 8 — компаратор перехода через нуль.
[14]
Страницы:
1
2
3
4
Усилители звука нужны для того, чтобы улучшить качество воспроизведения музыки путем уменьшения ее искажения при включении большой громкости. Иногда автовладельцы сталкиваются с ошибками усилителя на магнитоле Пионер: в колонках пропадает звук, а потом техника опять начинает работать, при этом на дисплее светится надпись «ERROR DC». Есть несколько способов устранения неполадок, выбрать правильный можно, определив причину неисправности.
Как и почему выдается ошибка
Усилитель — микросхема с несколькими маленькими металлическими штырями. Он может не работать при неправильном подключении или при повреждении составляющих частей прибора или проводки. Если эта деталь повреждена, то необходимо заменить усилку.

Если ошибка усилителя выявлена до его использования, значит, микросхема была подключена неправильно. Возможно, что вы использовали провода не того диаметра или подключили их не к тем входам.
Автомагнитола пишет «ERROR DC» и при коротком замыкании. Проверьте соединения на магнитоле и провода, которые используются для подключения колонок.
Возможно 1 из проводов перебит чем-то и поэтому производит короткое замыкание.
Можете сделать это самостоятельно, но диагностика в автосервисе на профессиональном оборудовании позволит точнее выявить причину проблемы.
Когда проводка не повреждена, а ошибка усилителя звука магнитолы Pioneer высвечивается на дисплее, скорее всего в приборе сгорел предохранитель.
Поломка может быть вызвана резким повышением громкости музыки на недорогих устройствах, выпущенных китайскими фирмами.
Производители подделок используют дешевые микросхемы низкого качества, которые менее устойчивы к изменениям настроек. Владельцы оригинальных автомагнитол с подобными неполадками в работе приборов сталкиваются редко.
Что делать
В случае обнаружения ошибки при подключении усилителя еще раз прочитайте инструкцию к нему и проверьте, все ли вы правильно подсоединили. Если Вам не удалось найти неточности, обратитесь в автомастерскую.

Когда вышеописанная проблема была выявлена в ходе эксплуатации устройства, выполните следующие действия:
- измерьте напряжение на выходе усилителя с помощью вольтметра;
- выполните подключение колонок к магнитоле, не используя усилитель;
- проверьте подключение проводки на магнитоле и колонках, чтобы выявить плохой контакт;
- посмотрите состояние предохранителей.
Часто к возникновению надписи «ERROR DC» приводят скрутки проводов или их повреждение. При обнаружении 1 проблемы надо установить жесткое соединение. Для этого можно использовать колодку с болтовыми зажимами. Во 2 случае — заменить поврежденную проводку.
Если эти действия не помогли от проблемы и ошибка усилителя не исчезла, ремонт микросхемы лучше доверить специалистам. В мастерской установят точную причину, по которой появилась неисправность, а также починят автомагнитолу.
Можно устранить самостоятельно ошибку в работе усилителя, но для этого надо разбираться в том, что представляет собой данная часть магнитолы и знать, какие функции выполняют ее составные части. Автомагнитола станет работать исправно, если отрубить первый штырь.
Помните о том, что ваши действия могут привести к поломке микросхемы, предназначенной для усиления звука. Если вы не разбираетесь в устройстве и способах подключения детали к автомагнитоле Пионер, посоветуйтесь с профессионалами.
- Прошивки для китайских магнитол
- Как включить аукс на магнитоле Пионер
- Как подключить телефон к магнитоле в машине через USB
- Как подключить сабвуфер к 4 канальному усилителю
-
Транзисторный усилитель
Транзисторный
усилитель является силовым элементом,
усиливающим сигнал с выхода усилителя
сигнала ошибки. Основная его задача –
согласование по мощности нагрузки
стабилизатора напряжения и маломощного
усилителя сигнала ошибки. Выбор
транзистора производится по току
нагрузки IН,
максимальному напряжению на выходе
UВ_MAX.
Рассеиваемая мощность транзистора с
радиатором должна быть не менее IН*
UВ_MAX.
![]() В
В
![]() Вт
Вт
Выбираем транзистор
2Т819А: Ркmax
= 100 Вт, UK
= 80 B,
Ikmax
= 15A,
h21
= 20.
Данный транзистор
не подходит по току базы, т.к. нам не
найти ОУ с токовым выходом больше тока
базы (![]() )
)![]() ,
,
поэтому применим составной транзистор
состоящий из 2Т819А(VT1)
и КТ630Е(VT2)
(Ркmax
= 0,8 Вт, UK
= 50 B,
Ikmax
= 1A,
h21
= 300).
![]()
Необходимый базовый
ток будет обеспечивать резистор R5.
![]()
Выбираем R5
= 8.2кОм
-
Усилитель сигнала ошибки
Усилитель сигнала
ошибки собираем на ОУ, выбираем ОУ
К153УД2 у которого UПИТmin
=
2, IВЫХ
= 0,5мА
-
Источник опорного напряжения
Источник
опорного напряжения должен формировать
стабильное напряжение на входе усилителя
ошибки. Стабильность источника опорного
напряжения определяет качественные
показатели стабилизатора, т.к. любые
колебания опорного напряжения однозначно
проявляются на выходе схемы. По сути
источник опорного напряжения является
маломощным высококачественным
параметрическим стабилизатором
напряжения.
Состоит он резистора
R4
и стабилитрона VD1.
Стабилитрон
выбираем так, чтобы UСТ
< UH
(на 2-3 вольта) и
(температурный коэффициент напряжения
стабилизации) был как можно меньшим.
Выбираем: КС162А:
UCT
= 6.2 B,
ICT
= 10 мA,
RCT
= 35 Ом.
Резистор
![]() Ом
Ом
![]() Вт
Вт
Выбираем резистор
МЛТ-0,125 – 910 Ом.
-
Делитель напряжения
Делитель напряжения
обеспечивает согласование заданного
выходного напряжения и выбранного
опорного. Коэффициент деления
рассчитывается по уравнению:
![]()
Коэффициент деления
схемы зависит от положения движка
подстроечного резистора R2.
![]()
![]()
Он используется
для точной установки коэффициента
деления в процессе настройки источника
питания.
Пусть R1
= 800 Ом, R2
= 1,2 кОм, R3
= 2 кОм.
![]() мА
мА
![]() мВт
мВт
Выбираем резистор
R1
МЛТ-0,125 – 820 Ом
![]() мВт
мВт
Выбираем подстроечный
резистор R2
С5-17-0,125 – 1,2 кОм
![]() мВт
мВт
Выбираем резистор
R3
МЛТ-0,125 – 2 кОм
Проверяем:
![]() =
=
0,5
![]()
= 0.8
-
Расчет защиты
Защита от
перенапряжения необходима при выходе
из строя силового транзистора
стабилизатора. В этом случае высокое
напряжение с выхода выпрямителя попадает
на нагрузку, которое на длительное
перенапряжение не рассчитано. Схема
защиты выполнена на транзисторе VT3
и шунте — резисторе R6.
как только нагрузка достигает заданного
максимально допустимого значения,
падение напряжения на шунте вызывает
открытие транзистора VT3.
Транзистор открывается и шунтирует
переход база-эмиттер силового транзистора
усилительного каскада. Это приводит к
уменьшению тока через VT1.
![]() Ом
Ом
![]() Вт
Вт
Выбираем резистор
R6:
KNP300 – 0.24 Ом
Транзистор VT3
выбираем КТ630Е.
Для окончательного
сглаживания на выходе стабилизатора
включим конденсатор С3 К50 35 220 на 10В.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Нашел в интернете схему дифференциального усилителя, добавил резистор R8, и схема заработала идеально. Коэффициент усиления также 5, только теперь другая крайность, усилитель чисто дифференциальный, и при равенстве входных напряжений на выходе 0. А при разности сигналов, допустим, в 0,05В, на выходе ОУ 250мВ. Только не пойму, почему первая схема дает 1В на выходе при равенстве входных напряжений и величине входных напряжений 1В, а вторая не дает 1В на выходе, хотя отличие всего-лишь в одном резисторе и то как делителя.
В первой схеме, при изменении V8 Ку=1+R6/R5, что составит +5, а при изменении V9 Ку=-R6/R5, что составит -4. Вот поэтому Вы и «теряете» 50 мВ.
Простой дифф усилитель с дополнительным резистором R8 имеет при изменении V8 Ку=1/(1+R7/R8)*(1+R6/R5), что составит +5, а при изменении V9 Ку=-R6/R5, что составит -5. Поэтому при равенстве V8=V9 выход и будет 0, а разница входов в 50 мВ даст разницу на выходе 250 мВ, как и должно получиться.
У простого дифф усилителя по Вашей схеме Rвх- будет 10 кОм, а Rвх+ целых 60 кОм. Если у Вас источники сигналов с низким выходным сопротивлением, вроде идеальных батарей V8, V9, то результат будет точным. Если какие-то реальные источники с выходным сопротивлением, например, 1 кОм, точность упадет.
Вам какой результат-то нужен? Чтобы при V8=1 и V9=1 на выходе было 1? Или 0?
P.S. И еще, использование первой схемы в цепи ООС любого другого устройства даст Вам разные характеристики управления, как частотные, так и по глубине, для уставки и для петли ООС. Про это не нужно забывать.
Добавка:
Сейчас есть хорошие разностные (difference) усилители, вроде AD628 и инструментальные вроде AD8227. Уставку заводят на REF. Если посмотрите, как они устроены, то многое станет понятнее.
UC3842 представляет собой схему ШИМ–контроллера с обратной связью по току и напряжению для управления ключевым каскадом на n-канальном МОП транзисторе, обеспечивая разряд его входной емкости форсированным током величиной до 0.7А. Микросхема SMPS контроллер состоит в серии микросхем UC384X (UC3843, UC3844, UC3845) ШИМ-контроллеров. Ядро UC3842 специально разработано для долговременной работы с минимальным количеством внешних дискретных компонентов. ШИМ-контроллер UC3842 отличается точным управлением рабочего цикла, температурной компенсацией и имеет невысокую стоимость. Особенностью UC3842 является способность работать в пределах 100% рабочего цикла (для примера UC3844 работает с коэффициентом заполнения до 50%.). Отечественным аналогом UC3842 является 1114ЕУ7. Блоки питания выполненные на микросхеме UC3842 отличаются повышенной надежностью и простотой исполнения.
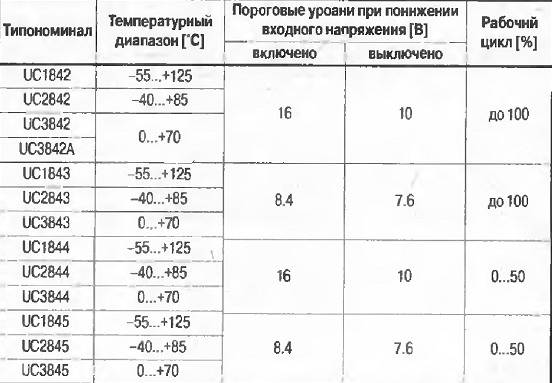
Данная таблица дает полное представление в различиях микросхем UC3842, UC3843, UC3844, UC3845 между собой.
- Общее описание.
- Немного теории.
- Схема подключения.
- Ремонт блока питания на основе ШИМ UC384X.
Общее описание
Для желающих более глубоко ознакомится с ШИМ-контроллерами серии UC384X, рекомендуется следующий материал.
- Datasheet UC3842B (скачать)
- Datasheet 1114ЕУ7 отечественный аналог микросхемы UC3842А (скачать).
- Статья «Обратноходовой преобразователь», Дмитрия Макашева (скачать).
- Описание работы ШИМ-контроллеров серии UCX84X (скачать).
- Статья «Эволюция обратноходовых импульсных источников питания», С. Косенко (скачать). Статья опубликована в журнале «Радио» №7-9 за 2002г.
-
Документ от НТЦ СИТ, самое удачное описание на русском языке для ШИМ UC3845 (К1033ЕУ16), настоятельно рекомендуется для ознакомления. (Скачать).
Различие микросхем UC3842A и UC3842B, A потребляет меньший ток до момента запуска.
UC3842 имеет два варианта исполнения корпуса 8pin и 14pin. Расположение выводов этих исполнений существенно отличаются . Далее будет рассматриваться только вариант исполнения корпуса 8pin.
Упрощенная структурная схема, необходима для понимания принципа работы ШИМ-контроллера.
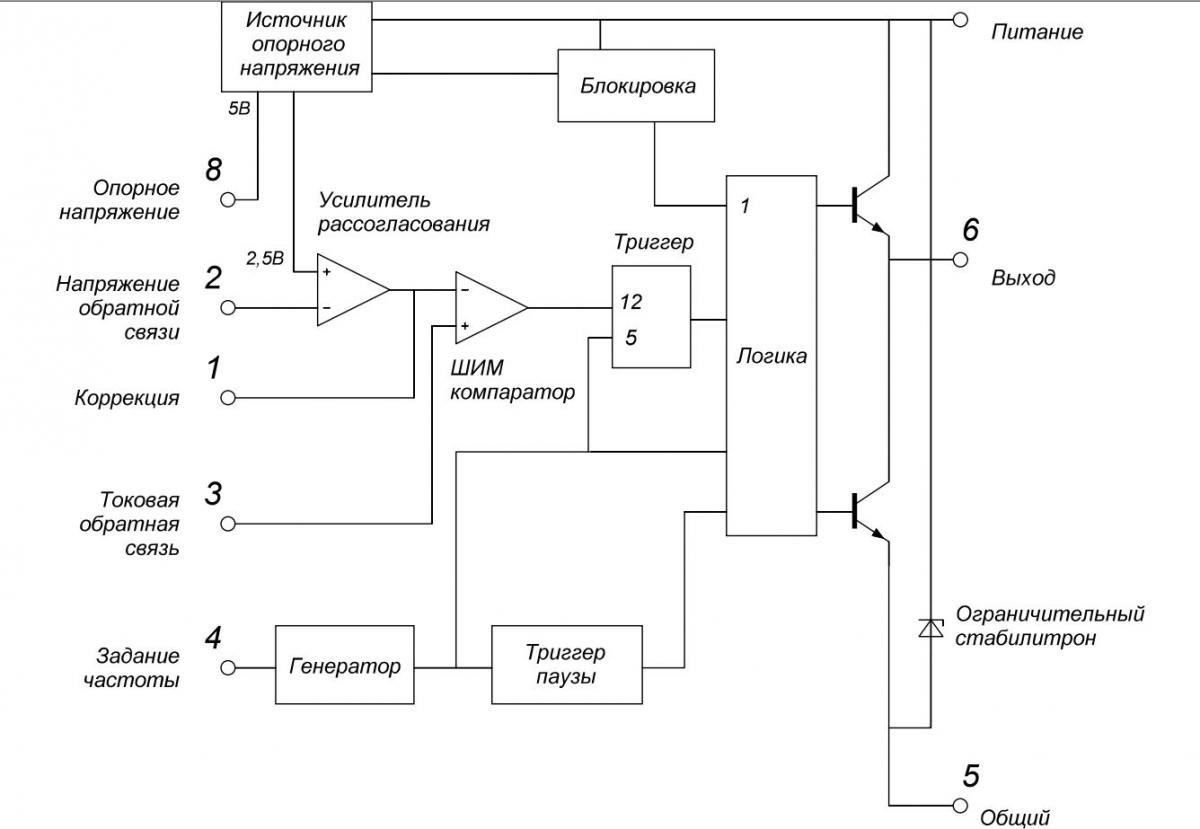
Структурная схема в более подробном варианте, необходима для диагностики и проверки работоспособности микросхемы. Так как рассматриваем вариант исполнения 8pin, то Vc-это 7pin, PGND-это 5pin.
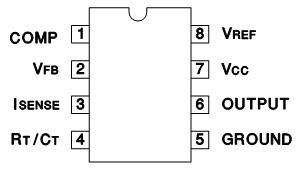
Здесь должен быть материал по назначению выводов, однако гораздо удобнее читать и смотреть на практическую схему включения ШИМ-контроллера UC3842. Схема нарисована настолько удачно, что намного упрощает понимание назначение выводов микросхемы.
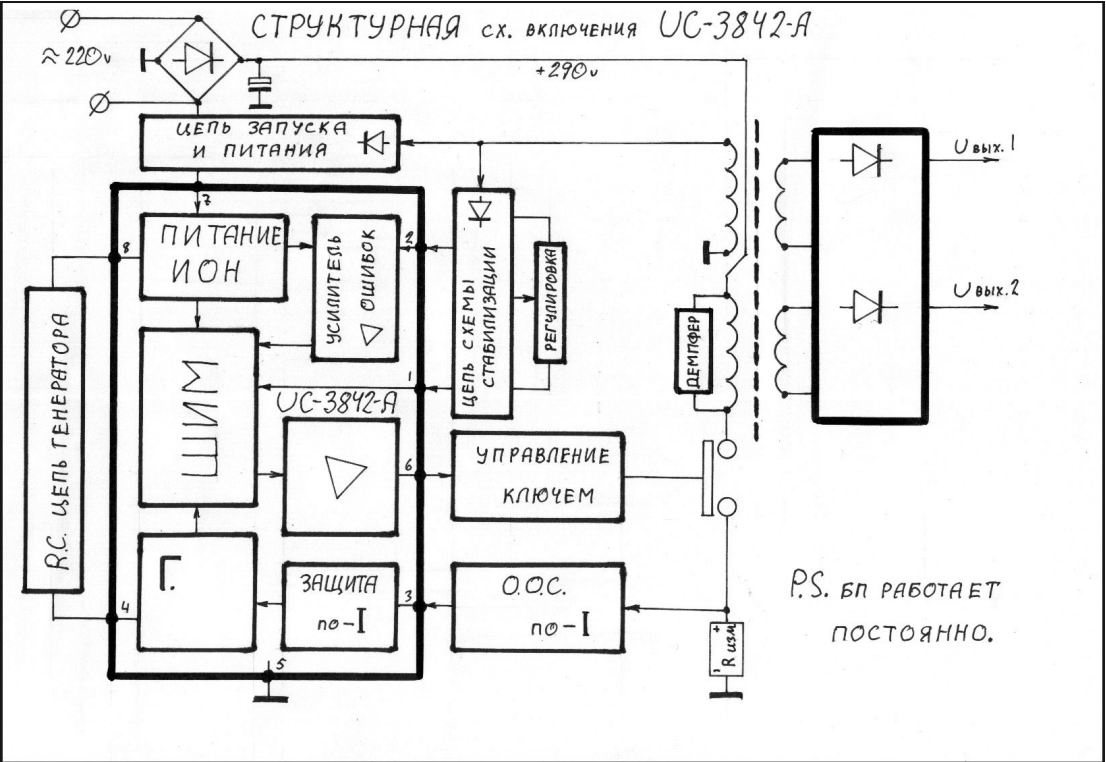
1. Comp:(рус. Коррекция) выход усилителя ошибки. Для нормальной работы ШИМ–контроллера необходимо скомпенсировать АЧХ усилителя ошибки, с этой целью к указанному выводу обычно подключается конденсатор емкостью около 100 пФ, второй вывод которого соединен с выводом 2 ИС. Если на этом выводе напряжение занизить ниже 1 вольта, то на выходе 6 микросхемы будет уменьшаться длительность импульсов, тем самым уменьшая мощность данного ШИМ–контроллера.
2. Vfb: (рус. Напряжение обратной связи) вход обратной связи. Напряжение на этом выводе сравнивается с образцовым, формируемым внутри ШИМ–контроллера UC3842. Результат сравнения модулирует скважность выходных импульсов, в результате выходное напряжение блока питания стабилизируется. Формально второй вывод служит для сокращения длительности импульсов на выходе, если на него подать выше +2,5 вольта, то импульсы сократятся и микросхема снизит выдаваемую мощность.
3. C/S: (второе обозначение I sense) (рус. Токовая обратная связь) сигнал ограничения тока. Данный вывод должен быть присоединен к резистору в цепи истока ключевого транзистора . В момент перегрузки МОП транзистора напряжение на сопротивлении увеличивается и при достижении определённого порога UC3842A прекращает свою работу, закрывая выходной транзистор. Проще говоря, вывод служит для отключения импульса на выходе, при подаче на него напряжения выше 1 вольта.
4. Rt/Ct: (рус. Задание частоты) подключение времязадающей RC-цепочки, необходимой для установки частота внутреннего генератора. R подключается к Vref — опорное напряжение, а С к общему проводу (обычно выбирается несколько десятков nF). Эта частота может быть изменена в достаточно широких пределах, сверху она ограничивается быстродействием ключевого транзистора, а снизу — мощностью импульсного трансформатора, которая падает с уменьшением частоты. Практически частота выбирается в диапазоне 35…85 кГц, но иногда источник питания вполне нормально работает и при значительно большей или значительно меньшей частоте.
Для времязадающей RC-цепочки лучше отказаться от керамических конденсаторов.
5. Gnd: (рус. Общий) общий вывод. Общий вывод не должен быть соединён с корпусом схемы. Это земля «горячая» соединяется с корпусом устройства через пару конденсаторов.
6. Out: (рус. Выход) выход ШИМ–контроллера, подключается к затвору ключевому транзистору через резистор или параллельно соединенные резистор и диод (анодом к затвору).
7. Vcc: (рус. Питание) вход питания ШИМ-контроллера, на этот вывод микросхемы подаётся напряжение питания в диапазоне от 16 вольт до 34, обратите внимание, что данная микросхема имеет встроенный триггер Шмидта(UVLO), который включает микросхему, если напряжение питания превышает 16 вольт, если-же напряжение по каким-либо причинам станет ниже 10 вольт (для других микросхем серии UC384X значения ON/OFF могут отличатся см. Таблицу Типономиналов ), произойдёт её отключение от питающего напряжения. Микросхема также обладает защитой от перенапряжения: если напряжение питания на ней превысит 34 вольта, микросхема отключится.
8. Vref: выход внутреннего источника опорного напряжения, его выходной ток до 50 мА, напряжение 5 В. Подключается к одному из плеч делителя служит для оперативной регулировки Uвыхода всего блока питания.
Немного теории
Схема отключения при понижении входного напряжения
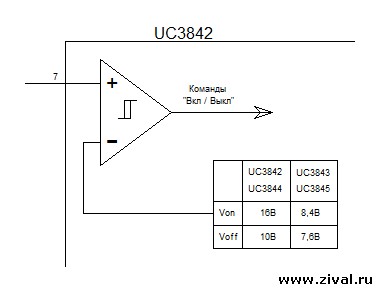
Схема отключения при понижении входного напряжения или UVLO-схема(по-английски отключение при понижении напряжения – Under-Voltage LockOut) гарантирует, что напряжение Vcc равно напряжению, делающему микросхему UC384x полностью работоспособной для включения выходного каскада. На Рис. показано, что UVLO-схема имеет пороговые напряжения включения и выключения, значения которых равны 16 и 10, соответственно. Гистерезис , равный 6В, предотвращает беспорядочные включения и выключения напряжения во время подачи питания.
Генератор
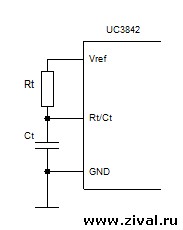
Частотозадающий конденсатор Ct заряжается от Vref(5В) через частотозадающий резистор Rt, а разряжается внутренним источником тока.
Микросхемы UC3844 и UС3845 имеют встроенный счетный триггер, который служит для получения максимального рабочего цикла генератора, равного 50%. Поэтому генераторы этих микросхем нужно установить на частоту переключения вдвое выше желаемой. Генераторы микросхем UC3842 и UC3843 устанавливается на желаемую частоту переключения. Максимальная рабочая частота генераторов семейства UC3842/3/4/5 может достигать 500 кГц.
Считывание и ограничение тока
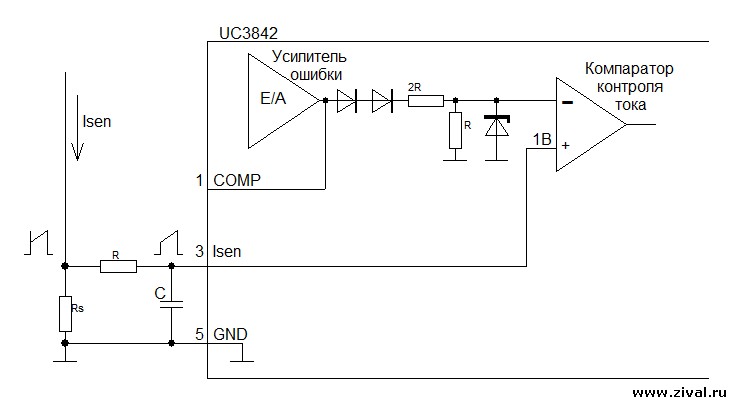
Преобразование ток-напряжение выполнено на внешнем резисторе Rs, связанном с землей. RC фильтр для подавления выбросов выходного ключа. Инвертирующий вход токочувствительного компаратора UC3842 внутренне смещен на 1 Вольт. Ограничение тока происходит, если напряжение на выводе 3 достигает этого порогового значения.
Усилитель сигнала ошибки
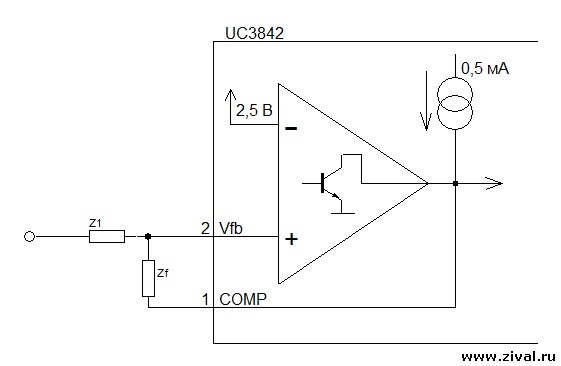
Неинвертирующий вход сигнала ошибки не имеет отдельного вывода и внутренне смещен на 2,5 вольт. Выход усилителя сигнала ошибки соединен с выводом 1 для подсоединении внешней компенсирующей цепи, позволяя пользователю управлять частотной характеристикой замкнутой петли обратной связи конвертора.
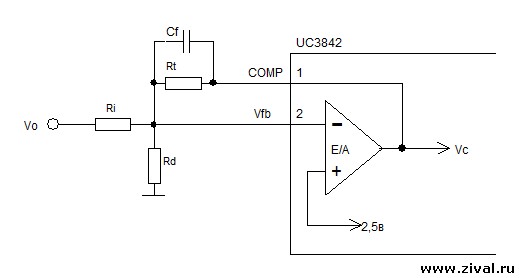
Схема компенсирующей цепи, подходящая для стабилизации любой схемы преобразователя с дополнительной обратной связью по току, кроме обратноходовых и повышающих конвертеров, работающих с током катушки индуктивности.
Способы блокировки
Возможны два способа блокировки микросхемы UC3842:
повышение напряжения на выводе 3 выше уровня 1 вольт,
либо подтягивание напряжения на выводе 1 до уровня не превышающего падения напряжения на двух диодах, относительно потенциала земли.
Каждый из этих способов приводит к установке ВЫСОКОГО логического уровня напряжения на выходе ШИМ-копаратора (структурная схема). Поскольку основным (по умолчанию) состоянием ШИМ-фиксатора является состояние сброса, на выходе ШИМ-компаратора будет удерживаться НИЗКИЙ логический уровень до тех пор, пока не изменится состояние на выводах 1 и/или 3 в следующем тактовом периоде (периоде, который следует за рассматриваемым тактовым периодом, когда возникла ситуация, требующая блокировки микросхемы).
Схема подключения
Простейшая схема подключения ШИМ-контроллера UC3842, имеет чисто академический характер. Схема является простейшим генератором. Несмотря на простоту данная схема рабочая.
Как видно из схемы, для работы ШИМ-контроллера UC3842 необходима только RC цепочка и питание.
Схема включения ШИМ контроллера ШИМ-контроллера UC3842A, на примере блока питания телевизора.
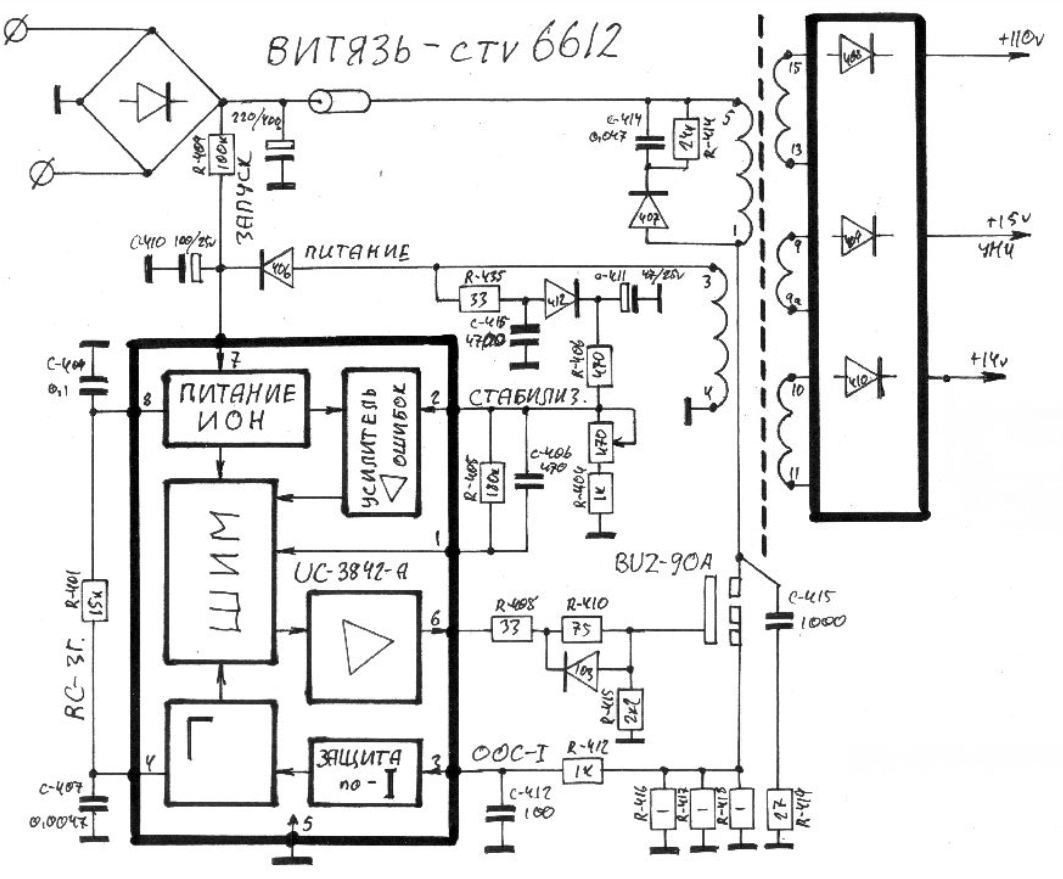
Схема дает наглядное и простое представление использования UC3842A в простейшем блоке питания. Схема для упрощения чтения, несколько изменена. Полный вариант схемы можно найти в PDF документе «Блоки питания 106 схем» Товарницкий Н.И.
Схема включения ШИМ контроллера ШИМ-контроллера UC3843, на примере блока питания маршрутизатора D-Link, JTA0302E-E.
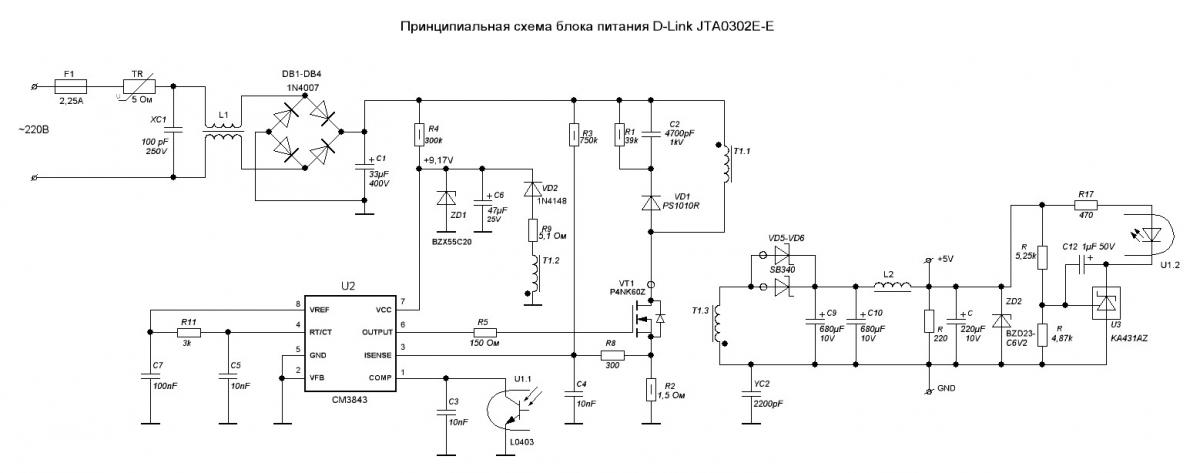
Схема хоть и выполнена по стандартному включению для UC384X, однако R4(300к) и R5 (150) выводят из стандартов. Однако удачно, а главное, логично выделенные цепи, помогают понять принцип работы блока питания.
Блок питания на ШИМ-контроллере UC3842. Схема не предназначена для повторения, а преследует только ознакомительные цели.
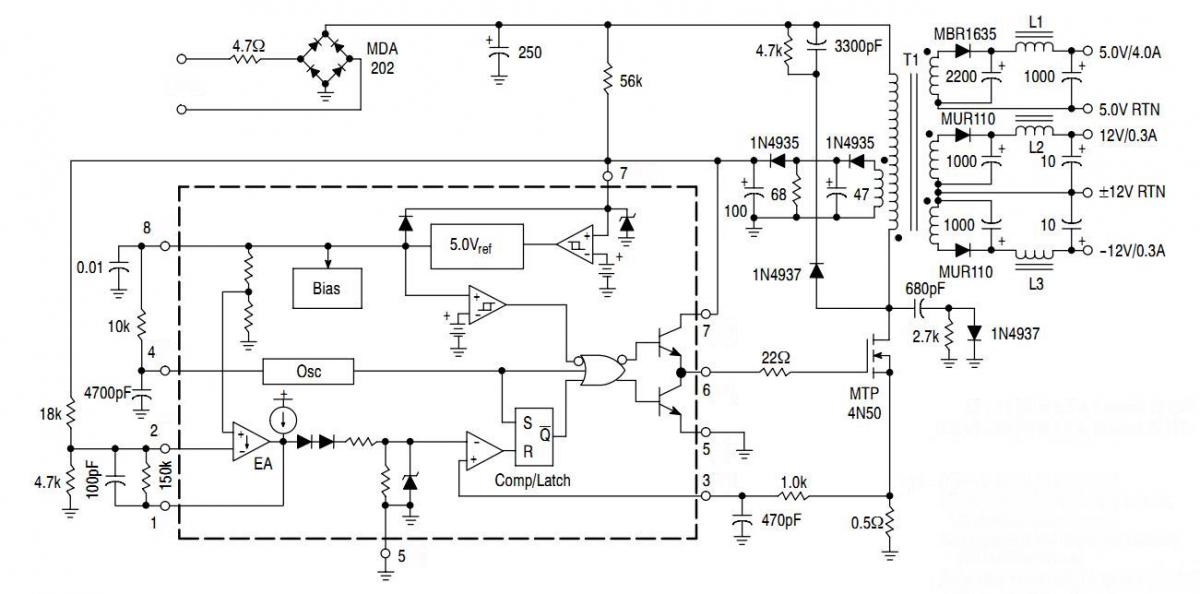
Ремонт блока питания на основе ШИМ UC384X
Проверка при помощи внешнего блока питания
Проверка работы проводится без выпаивания микросхемы из блока питания. Блок питания перед проведением диагностики необходимо выключить из сети 220В!
От внешнего стабилизированного блока питания подать напряжение на контакт 7(Vcc) микросхемы напряжение более напряжения включение UVLO, в общем случае более 17В. При этом ШИМ-контроллер UC384X должен заработать. Если питающее напряжение будет менее напряжения включения UVLO (16В/8.4В), то микросхема не запустится. Подробнее про UVLO можно почитать здесь.
Проверка внутреннего источника опорного напряжения
У рабочего ШИМ-контроллера UC384X напряжение на контакте 8(Vref) должно быть +5В.
Проверка UVLO
Если внешний источник питания позволяет регулировать напряжение, то желательно проверить работу UVLO. Изменяя напряжение на контакт 7(Vcc) контакте в рамках диапазона напряжений UVLO опорное напряжение на контакте 8(Vref) = +5В не должно меняться.
UC3842 и UC3844 напряжение включения 16В, напряжение выключения 10В
UC3843 и UC3845 напряжение включения 8,4В, напряжение выключения 7,6В
Подавать напряжение 34В и выше на контакт 7(Vcc) не рекомендуется. Возможно наличие в цепи питания ШИМ-контроллера UC384X защитного стабилитрона, тогда выше рабочего напряжения этого стабилитрона подавать не рекомендуется.
Проверка работы генератора и внешних цепей генератора.
Для проверки потребуется осциллограф. На контакте 4(Rt/Ct) должна быть стабильная «пила».
Проверка выходного управляющего сигнала.
Для проверки потребуется осциллограф. В идеале на контакте 6(Out) должны быть импульсы прямоугольной формы. Однако исследуемая схема может отличаться от приведенной и тогда потребуется отключить внешние цепи обратной связи. Общий принцип показан на рис. – при таком включении ШИМ-контроллер UC384X гарантированно запустится.
Если БП с управляющим ШИМ-контроллером типа UC384x не включается или включается с большой задержкой, то проверьте заменой электролитический конденсатор, который фильтрует питание (7 вывод) этой м/с. Также необходимо проверить элементы цепи начального запуска (обычно два последовательно включенных резистора 33-100kOhm).
При замене силового (полевого) транзистора в БП с управляющей м/с 384x следует обязательно проверять резистор, выполняющий функцию датчика тока (стоит в истоке полевика). Изменение его сопротивления при номинале в доли Ома очень сложно обнаружить обычным тестером! Увеличение сопротивления этого резистора ведет к ложному срабатыванию токовой защиты БП. При этом можно очень долго искать причины перегрузки БП во вторичных цепях, хотя их там вовсе и нет.
Рекомендуемые сообщения

Гость rew
-
- Поделиться
Уважаемые гуру, подскажите, с каким минимальным напряжение работают усилители ошибок. Нужно сделать ограничение по току. После шунта при токе 50А напряжение 0,03В(будет нормально воспринимать и работать Tl494)
- Цитата
Ссылка на комментарий
Поделиться на другие сайты

")
-
- Поделиться
- Цитата
Просят — не откажи. Не просят — не навязывайся!
Простота хуже воровства.
Ссылка на комментарий
Поделиться на другие сайты

Гость rew
-
- Поделиться
В схеме вариант С. Шунт имеет сопротивления 0,05 Ом, то есть при токе 10А падение на шунте составит около 0,5В а у меня при шунте 0,001 падение составляет 0,03В. В даташитах плохо разбираюсь, если я правильно понял мин входное напряжение на вход компаратора составляет 0,3 В. Я правильно понял или нет?
- Цитата
Ссылка на комментарий
Поделиться на другие сайты

")
Гость rew
-
- Поделиться
Спасибо огромное. Попробую первый вариант схемы.
- Цитата
Ссылка на комментарий
Поделиться на другие сайты
-
- Поделиться
14 минут назад, Гость rew сказал:
правильно понял или нет?
Неправильно. 0,3 В — это максимальное отрицательное входное напряжение относительно потенциала минусовой (общей, «земляной») шины питания, при котором усилитель еще работает нормально.
- Цитата
Просят — не откажи. Не просят — не навязывайся!
Простота хуже воровства.
Ссылка на комментарий
Поделиться на другие сайты
")
-
- Поделиться
Работать будет, но если предварительно усилить сигнал шунта, можно достичь лучших результатов.
- Цитата
Ссылка на комментарий
Поделиться на другие сайты

-
- Поделиться
Описанный в документе вариант делал — работает хорошо. Шунт брал от неисправного тестера — он в районе 0,01 Ома. Регулировка была примерно от 100 мА до 10 ампер — то есть, там вообще миллиВольты можно выловить.
- Цитата
«Я не знаю какой там коэффициент, я просто паять умею. »
Ссылка на комментарий
Поделиться на другие сайты
Гость rew
-
- Поделиться
Схема с документа, меряет напряжение на 15 входе тлки, если оно больше 15 мВ, тогда ограничевается ток. Или как то иначе?
- Цитата
Ссылка на комментарий
Поделиться на другие сайты
-
- Поделиться

На прямом входе усилителя (16н) нулевое напряжение, на инверсном входе (15н) подано небольшое положительное смещение (+15 мВ). На выходе усилителя (3н) низкий уровень и он не влияет на работу микросхемы.
При повышении тока отрицательное падение напряжения на шунте вычитается из смещения на инверсном входе и в какой-то момент прямой вход усилителя становится «плюсовее» инверсного. На выходе усилителя ошибки появляется высокий уровень, он начинает влиять на внутренние компараторы микросхемы, ширина генерируемых ей импульсов уменьшается и выходной ток БП падает.
Соответственно, меняя смещение (соотношение номиналов делителя) можно менять порог ограничения тока.
- Цитата
«Я не знаю какой там коэффициент, я просто паять умею. »
Ссылка на комментарий
Поделиться на другие сайты
Присоединяйтесь к обсуждению
Вы можете написать сейчас и зарегистрироваться позже.
Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Примечание: Ваш пост будет проверен модератором, прежде чем станет видимым.