О чем же, собственно, пойдет речь? В техническую литературу и журнальные статьи прокралась калька с английского языка regulated output, и DC/DC-преобразователи стали разделять на просто DC/DC-преобразователи и «регулируемые» DC/DC-преобразователи, или DC/DC-преобразователи «с регулируемым выходом» (в буквальном переводе). Так вот, под ошибочно используемым термином «регулируемые» скрываются DC/DC-преобразователи с петлей, или, правильнее, с контуром регулирующей обратной связи, который управляет уровнем выходного напряжения. Именно этот контур обеспечивает ответную реакцию схемы управления импульсного преобразования напряжения на самые разнообразные возмущения, связанные с изменением не только входного напряжения (необязательно плавного) преобразователя, но и его нагрузки и температуры. Другими словами, данный контур отвечает за стабилизацию выходного напряжения. И потому, как уже было сказано, одним из наиболее важных моментов при проектировании DC/DC-преобразователей является правильный выбор и соответствующий ему расчет обратной связи. А кроме того, еще и правильный выбор методологии компенсации в петле обратной связи. Если параметры контура обратной связи (в англ. терминологии — feedback loop) будут рассчитаны неверно, то преобразователь может оказаться нестабильным или иметь сбои при регулировании, то есть, как мы уже определились, при стабилизации выходного напряжения или тока в условиях возмущающих воздействий.
Итак, назначение и основная функция петли обратной связи в DC/DC-преобразователе — поддержание выходного напряжения или тока на заданном фиксированном уровне, зависящего только от значения опорного напряжения, с которым он сравнивается в петле регулирования. Оно не должно зависеть ни от нагрузки, ни от входного напряжения, ни от изменения условий окружающей среды. На первый взгляд это звучит просто и реализуется относительно легко, но… лишь для статических или медленно изменяющихся условий при функционировании преобразователя. Однако для обработки динамически изменяющихся или, что еще хуже, ступенчато изменяющихся указанных выше условий разработка петли обратной связи становится весьма непростой задачей.
Один из наиболее важных компромиссов, который должен быть найден, — достижение приемлемого баланса между стабильностью выходного напряжения преобразователя при статических и динамических условиях его эксплуатации. Или между приемлемым уровнем пульсации, малым диапазоном нечувствительности регулирования (диапазон фактических отклонений, где преобразователь может не изменять свои выходные величины), заданной точностью поддержания выходного напряжения и ответом на динамические изменения рабочих условий. Здесь имеются в виду быстрота его реакции, малое время установления и минимальный выброс при переходных процессах. Кроме того, контур управления должен быть устойчив при всех заданных условиях эксплуатации, в том числе при малой нагрузке или даже в случае ее отсутствия. Таким образом, результат разработки петли обратной связи является одним из ключевых факторов, определяющих общие характеристики DC/DC-преобразователя со стабилизацией выходного напряжения.
Стабилизация без контура обратной связи
Не все DC/DC-преобразователи, обладающие в той или иной степени стабилизацией выходного напряжения, применяют обратную связь, выполненную в виде отдельной схемы. Здесь она все равно имеется, но косвенная, как свойство топологии. Так, базовый автогенератор Ройера (англ. Royer relaxation oscillator), используемый в примере, показанном на рис. 1, не имеет регулирующей петли обратной связи.

Рис. 1. Двухтактный преобразователь Ройера без петли регулирования
Автоколебательная схема действует на частоте, которая определяется физическими характеристиками трансформатора и зависит только от входного напряжения, в соответствии со следующим соотношением:
![]()
Здесь NP — это число витков первичной обмотки; В — представляет собой магнитный поток насыщения; а AE — площадь поперечного сечения трансформатора. Формула может быть преобразована для вычисления частоты автоколебаний f:
Использованный в формуле коэффициент 4 отличается от стандартного уравнения трансформатора, в котором используется коэффициент 4,44. Это связано с тем, что автогенератор Ройера выдает меандр, а не синусоидальный сигнал. Само выходное напряжение непосредственно зависит от соотношения числа витков на первичной обмотке NP по отношению к числу витков на вторичной обмотке NS:

Из приведенных соотношений мы можем видеть, что и выходное напряжение, и рабочая частота не являются в данном случае фиксированными и зависят от входного напряжения. Поэтому в идеале нерегулируемые DC/DC-преобразователи могут быть использованы только при стабильном входном напряжении.
Однако на практике есть еще и скрытые механизмы обратной связи, обеспечивающие характеристики автогенератора Ройера выше, чем в теории. Первичные, вторичные обмотки, а также обмотки обратной связи, так или иначе, взаимодействуют между собой из-за наличия индуктивностей рассеяния и емкостной связи. Обмотки могут быть расположены на сердечнике для увеличения или уменьшения этих взаимодействий или экранирования одной обмотки от влияния другой. Например, нерегулируемые преобразователи могут быть выполнены таким образом, чтобы быть устойчивыми к короткому замыканию. Это достигается путем намотки их вторичных обмоток между первичными обмотками и обмотками обратной связи. Такая намотка приводит к тому, что в случае короткого замыкания на выходе в трансформаторе образуется своеобразный защитный экран, который уменьшает связь между первичной и вторичной обмотками. Когда выход замкнут накоротко, то преобразователь продолжает генерировать колебания, но уже при сильно сниженной мощности, так что его ключи могут спокойно выдержать работу в этом режиме. В случае полного короткого замыкания рассматриваемый преобразователь будет функционировать с нагревом, но выдержит данный режим и не выйдет из строя. Как только короткое замыкание будет устранено — преобразователь вернется к своему нормальному режиму работы с полной выходной мощностью.
Замкнутые контуры обратной связи
Зависимость уровня выходного напряжения от величины входного напряжения может быть наиболее эффективно устранена с помощью введения регулирующей петли обратной связи. В общем представлении сигнал обратной связи подается на усилитель ошибки, который сравнивает фактический уровень выходного напряжения (как правило, уменьшенный делителем) с неким опорным значением (его формирует высокостабильный источник напряжения) и корректирует выходное напряжение так, чтобы привести его в заданное соответствие. Поскольку коррекция всегда работает в противофазе по отношению к отклонению (если выходное напряжение слишком высоко, то действие направлено на его уменьшение, а если оно слишком низко, то на его увеличение), такая обратная связь называется негативной, или отрицательной. Если же петля обратной связи окажется позитивной, или положительной, то любые ошибки будут усиливаться и выходное напряжение либо будет пульсировать, либо быстро перейдет к возможному для нее минимальному или максимальному уровню. Обеспечение такого режима, при котором во время переходных процессов условия для положительной обратной связи никогда бы не возникали, является одним из самых сложных аспектов разработки петли регулирующей обратной связи.
Совершенством обратной связи является тот факт, что в выходном напряжении будут компенсированы как все изменения входного напряжения, так и любые изменения, вызванные изменением нагрузки на преобразователь. Для обоих моментов используется одна и та же корректирующая петля обратной связи. Еще одно преимущество замкнутых контуров обратной связи заключается в том, что вход и выход не обязательно должны иметь одни и те же физические величины для регулирования. Так, контур обратной связи может быть использован для обеспечения постоянного тока на выходе от источника непостоянного по уровню входного напряжения. В этом случае усилитель ошибки в соответствии с сигналом обратной связи просто регулирует выходную мощность. Подобная регулировка выполняется на основании выходного тока, а не уровня выходного напряжения. В действительности в этом случае преобразователь становится транскондуктивным усилителем (то есть усилителем тока, управляемым напряжением) вместо обычного усилителя напряжения. Но в общем случае значение тока все равно переводится в пропорциональный току уровень напряжения, так что в любом случае сравниваются напряжения.
Для анализа схемной реализации петли обратной связи возьмем в качестве примера простой неизолированный понижающий стабилизатор напряжения. Его типичная электрическая принципиальная схема может быть следующей (рис. 2).

Рис. 2. Упрощенная схема понижающего преобразователя с функцией стабилизации напряжения
С точки зрения функциональных блоков рис. 2 может быть преобразован до следующей функциональной схемы, представленной на рис. 3.

Рис. 3. Блок-схема петли обратной связи
Каждый функциональный блок будет иметь собственный коэффициент передачи (усиления) К. Силовой ключ (как правило, полевой транзистор) будет иметь усиление KPWR, выходной фильтр, выполненный на индуктивности L1 и конденсаторе C1, будет иметь коэффициент усиления KFILT(S), элемент обратной связи (резистивный делитель, образован резисторами R1 и R2) будет иметь усиление KFB. Хотя мы все время говорим про коэффициент усиления, не будем забывать, что он может быть и менее единицы, то есть показывать ослабление, а не усиление сигнала. Полученный в результате сигнал обратной связи сравнивается с опорным напряжением VREF в точке суммирования, а ошибка суммирования усиливается усилителем ошибки A1 с коэффициентом усиления KEA(S). Выходное напряжение усилителя ошибки используется для управления ШИМ-модулятором (основа любого DC/DC-преобразователя), в свою очередь имеющим коэффициент усиления KMOD. Некоторые из этих усилительных блоков будут иметь большое усиление, а некоторые из них, наоборот, ослаблять сигнал, но общий коэффициент усиления разомкнутой петли обратной связи, или, как ее еще называют, контура (суммарное усиление), положительный и, как правило, составляет около 1000.
Коэффициент усиления при разомкнутой цепи обратной связи:
![]()
Простая схема, показанная на рис. 2, будет иметь резонанс (полюс), вызванный наличием выходного LC-фильтра. Частота этого резонанса определяется как:

Дополнительный резонанс (нуль), вызванный наличием эквивалентного последовательного сопротивления ESR (англ. ESR — Equivalent Series Resistance) конденсатора, определяется как:

На частотах выше fPO, коэффициент усиления уменьшается со скоростью –40 дБ/декада. Это связано с амплитудно-частотной характеристикой (АЧХ) выходного LC-фильтра, который представляет собой фильтр второго порядка. Точка fC, в которой АЧХ достигает единицы (усиление равно 0 дБ), является частотой излома, или, как ее еще иногда называют, частотой перехода. На частоте fZO эффект фильтра первого порядка обеспечивает RC-фильтр, образованный ESR конденсатора фильтра, он изменяет крутизну АЧХ усиления на –20 дБ/декада. График нормированного коэффициента усиления от частоты показывает, что и крутизна АЧХ, и изменение фазы (фазо-частотная характеристика, ФЧХ) контура обратной связи зависят от частоты.
ФЧХ претерпевает дополнительное изменение на 180°, вызванное подключением цепи обратной связи к инвертирующему входу усилителя ошибки A1.

Рис. 4. Нормированная диаграмма зависимости усиления и фазы от частоты для схемы преобразователя, приведенной на рис. 2
Как видно из фазовой диаграммы, схема неустойчива на частоте перехода, поскольку изменение фазы здесь составляет –180° или –360°, если учитывать в целом. Это заставит преобразователь войти в область положительной обратной связи, и на его выходе появятся затухающие высокочастотные колебания, которые на техническом жаргоне называются «звон», или при определенных условиях может начаться даже паразитный незатухающий автоколебательный процесс.
При увеличении коэффициента усиления в каскаде усилителя ошибки частота, на которой результирующий коэффициент усиления равен 1, может быть смещена в более безопасную область. Запас по фазе (а это разница между результирующей общей фазой и фазой в –180° на системной частоте fC) и запас по усилению (это усиление системы в точке фазы, равной –180°) определяют, насколько стабильна петля обратной связи (рис. 5).

Рис. 5. Запас по усилению и фазе
Роль компенсации в цепи обратной связи
Чем дальше находится выбранная системная частота перехода от собственной частоты среза преобразователя, тем более стабильным будет его выходное напряжение. В этом случае он имеет лучший запас по коэффициенту усиления и фазе, но при этом и медленнее его реакция на возмущения. Запас по фазе около 45° обеспечивает хороший отклик с небольшим переходным процессом и без звона.
Кроме того, обеспечить устойчивость можно простым перемещением системной частоты среза в безопасную зону. Это достигается простым увеличением коэффициента усиления усилителя ошибки во всей полосе рабочих частот. Таким образом, фазовый сдвиг усилителя ошибки может быть не зависящим от частоты, что достигается добавлением элементов компенсации в цепь обратной связи операционного усилителя (рис. 6).

Рис. 6. Некомпенсированный (слева) и компенсированный (справа) усилитель ошибки
Значения номиналов компонентов компенсации могут быть выбраны таким образом, чтобы фаза сигнала переворачивалась и добавляла запас по фазе в точке критической частоты перехода, тем самым увеличивая стабильность преобразователя. Это позволяет использовать выходной фильтр с меньшим демпфированием, тем самым ускоряется реакция DC/DC-преобразователей во время переходных процессов без риска чрезмерного перерегулирования или возникновения паразитной генерации (рис. 7).

Рис. 7. Соотношения между усилением и фазой в схеме усилителя ошибки с компенсацией, показанной на рис. 5
Дополнительные пояснения дает рис. 8.

Рис. 8. Компенсированные (сплошная линия) по отношению к однополюсной (показана пунктиром) характеристики (АЧХ и ФЧХ) контура обратной связи для схемы, представленной на рис. 6
Здесь пунктирная линия показывает зависимость коэффициента усиления и фазы от частоты для усилителя ошибки с дополнительным усилением, но без компенсации. А сплошная линия демонстрирует дополнительное усиление и фазовый сдвиг, полученные за счет компонентов компенсации.
Максимально возможный сдвиг фазы, который может быть получен за счет компенсации, составляет 180° (–90…+90°). Кроме того, чтобы компенсировать нули и полюса выходного фильтра, в цепь компенсации также должно быть включено дополнительное число полюсов и нулей.
При правильно спроектированной цепи обратной связи реакция на сброс/наброс нагрузки или ступенчатое изменение нагрузки либо входного напряжения (без какого-либо ущерба для стабильности в функционировании петли обратной связи) может быть ускорена в 3–4 раза.
Нестабильность правой полуплоскости
В топологиях, где выходной дроссель работает с непрерывным током через диод, — например, в повышающих, повышающе-понижающих, обратноходовых и прямоходовых преобразователях, — время проводимости диода добавляет задержку в цепи обратной связи. Это связано с тем, что когда нагрузка резко возрастает, то для передачи большей энергии в катушку индуктивности рабочий цикл должен быть временно увеличен. Тем не менее рабочий цикл большой длительности приводит к уменьшению времени проводящего состояния (tOFF) диода, так что средний ток через диод во время tOFF фактически уменьшается (рис. 9, справа). По мере того как выходной ток протекает через диод, этот ток также уменьшается. Данное условие сохраняется до тех пор, пока средний ток дросселя медленно увеличивается, а ток диода достигает заданного значения.
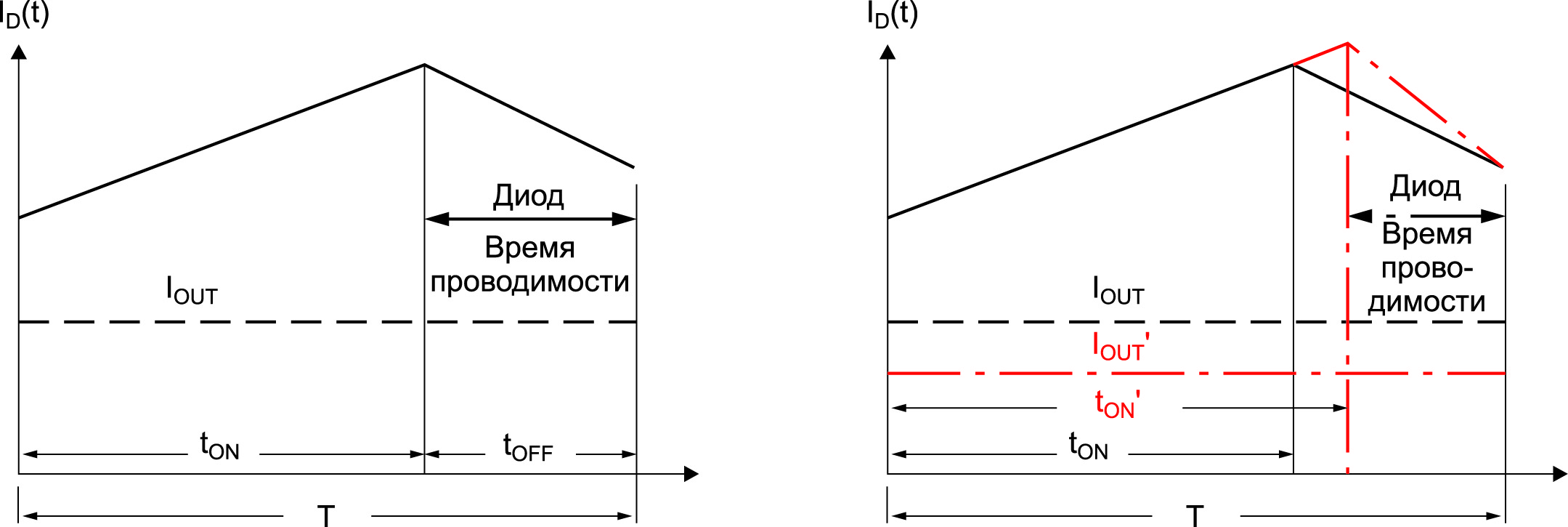
Рис. 9. Феномен правой полуплоскости
Это явление, когда ток через диод должен сначала уменьшиться, прежде чем он станет увеличиваться, известен как нестабильность правой полуплоскости (англ. Right Half Plane instability или RHP instability), потому что выходной ток временно находится в противофазе с рабочим циклом. Например, в простом повышающем преобразователе (рис. 10) частота временного дополнительного нуля находится в соответствии с выражением:


Рис. 10. Повышающий импульсный стабилизатор, упрощенная схема
RHP-нестабильность практически невозможно компенсировать, поскольку этот ноль изменяется еще и с током нагрузки. Решение состоит в том, чтобы выбрать параметры петли обратной связи с частотой среза существенно ниже самой низкой частоты появления RHP нулей (это имеет определенный недостаток, поскольку приводит к ухудшению времени реакции DC/DC-преобразователя на ступенчатое изменение нагрузки). Для того чтобы устранить подобную проблему в целом, необходимо использовать понижающе-повышающий преобразователь в режиме прерывистых токов (режим DCM).
Компенсация наклона
Еще одной возможной причиной нестабильности петли обратной связи является субгармоническая бифуркация, или нестабильность, вызванная раздваиванием. Основная причина такой нестабильности — ШИМ-компаратор, который сравнивает уровень напряжения обратной связи с возрастающим пилообразным напряжением. Для того чтобы разобраться, обратимся к блок-схеме, приведенной на рис. 11.

Рис. 11. Блок-схема ШИМ-контроллера, работающего в режиме управления по напряжению (Voltage Mode Control)
Проблема здесь может возникнуть по той причине, что с каждым циклом переключения энергия в дросселе не исчезает полностью, так что ток, когда это не нужно, течет обратно в цепь обратной связи. Кроме того, это может быть просто переключением компаратора из-за наличия помех на его входе. Эффект аналогичен тому, как если бы ШИМ-модулятор формировал раздвоенный (это и есть бифуркация), или двойной, импульс.

Рис. 12. Временная диаграмма, иллюстрирующая субгармоническую нестабильность
Решение проблемы субгармонической неустойчивости называется компенсацией крутизны, или наклона (англ. Slope Compensation) (рис. 12). Такая компенсация заключается в том, чтобы добавить искусственный пилообразный сигнала (как правило, для этого используется спадающий ток дросселя, а иногда сигнал для компенсации берется непосредственно от напряжения на частотозадающем конденсаторе). Для того чтобы избежать ложных срабатываний или повторного запуска ШИМ-компаратора, это напряжение добавляется непосредственно к напряжению обратной связи (рис. 13).

Рис. 13. Компенсация наклона (пунктирная линия) и сигнал обратной связи (сплошная линия)
Определение стабильности петли обратной связи экспериментальным путем
Стабильность поведения контура обратной связи можно определить экспериментально с помощью прибора для построения диаграммы Боде (получения логарифмической амплитудно-фазовой частотной характеристики), которая является представлением частотного отклика линейной стационарной системы в логарифмическом масштабе. Для того чтобы ввести сигнал возмущения в контур управления, можно использовать внешний генератор синусоидального сигнала со звуковым трансформатором, через который и подается возмущающий сигнал (рис. 14). Частота этого внешнего синусоидального сигнала линейно возрастает вплоть до уровня возмущения на выходе, равного по уровню возмущающему сигналу. Усиление в данном случае равно 1, и, таким образом, частота возмущающего сигнала должна быть равна частоте перехода fc контура обратной связи. Разность фаз между возмущающим сигналом и выходным сигналом и является запасом по фазе. При дальнейшем увеличении частоты до тех пор, пока разность фаз не достигнет –180°, может быть найден запас по усилению.

Рис. 14. Схема для экспериментального построения диаграммы Боде
Определение стабильности петли обратной связи с использованием преобразования Лапласа
Альтернативой экспериментальному методу определения стабильности является математическое вычисление нулей и полюсов. Для этого нам необходимо знать передаточную функцию преобразователя.
Для простого понижающего преобразователя, показанного на рис. 1, передаточная функция равна:

Параметр, обозначенный как s, здесь указывает на то, что переменная передаточной функции имеет частотную зависимость. Передаточная функция может быть решена с помощью преобразования Лапласа, но для того, чтобы понять это преобразование, сначала нужно рассмотреть преобразование Фурье.
Преобразование Фурье — это особая форма преобразования Лапласа. Фурье установил, что любой периодический сигнал является суммой синусоидальных сигналов различной частоты, фазы и амплитуды (ряд Фурье). Преобразование представляет собой переход из временной области в частотную область (и наоборот). Результат преобразования Фурье для периодического сигнала представляет собой эквивалент ряда Фурье, или спектр. На рис. 15 наглядно показаны первые шесть гармоник периодического сигнала прямоугольной формы.

Рис. 15. Графическое представление разложения в ряд Фурье для сигнала прямоугольной формы
Преобразование Фурье является интегралом функции с пределами интегрирования от минус до плюс бесконечности. Это можно записать в виде:

При отображении в S-плоскости переменная преобразования Фурье становится равной s = jω, а результатом будут только мнимые (комплексные) переменные.
Преобразование Лапласа является расширенным вариантом преобразования Фурье. Переменная преобразования Лапласа находится в комплексной плоскости, а интегрирование начинается с нуля, а не с минус бесконечности. При этом функция времени F(t) заменяется ее изображением, как функция от частоты F(s). Это означает, что данное преобразование может быть использовано для анализа ступенчатых или полубесконечных сигналов, таких как импульс или экспоненциальная последовательность с затуханием. Преобразование Лапласа можно записать в виде:

При переходе в S-плоскость переменная преобразования Фурье заменяется на s = σ + jω.
Используя преобразование Лапласа, можно математически смоделировать петлю обратной связи и генерацию нулей и полюсов на S-плоскости диаграммы. Вертикальная ось является мнимой, а горизонтальная ось — действительной. Чем выше или ниже они перемещаются по мнимой оси, тем быстрее возникают колебания. Чем дальше перемещение по отрицательной действительной оси, тем быстрее затухание, а чем далее перемещение по вещественной положительной оси, тем быстрее нарастание, что и поясняет рис. 16.

Рис. 16. График расположения нулей и полюсов в S-плоскости показывает соответствующие типичные временные диаграммы поведения системы
Нули всегда лежат на действительной оси. Комплексно сопряженные пары полюсов в левой половине S-плоскости объединяются так, чтобы сформировать отклик, который является затухающей синусоидальной функцией вида
![]()
где А и θ — это начальные условия, σ — скорость затухания, а ω — угловая частота в рад/с.
Пара полюсов, которая лежит на мнимой оси ±jω (без действительного компонента), генерирует колебания с постоянной амплитудой. Расстояние полюса от начала координат указывает на то, как происходит затухание отклика. Чем полюс ближе к началу координат, тем меньше скорость затухания. Если полюс находится на нуле, это означает, что перед нами система постоянного тока.
Если полюс находится в правой полуплоскости, система неустойчива (это соответствует понятию неустойчивости правой полуплоскости — RHP, описанному ранее).
Определение стабильности цифровой петли обратной связи с помощью билинейного преобразования
Если для формирования компенсации в петле обратной связи используется цифровой сигнальный процессор DSP (англ. DSP — Digital Signal Processor), стабильность такого цифрового контура может быть достигнута с помощью преобразования Лапласа для систем с дискретными сигналами.
В такой цифровой системе в качестве входного сигнала предусмотрен уже не непрерывный во времени сигнал, а дискретный в виде выборок с определенной частотой, называемой частотой дискретизации. Таким образом, значения переменных в s-плоскости должны быть преобразованы в дискретные значения Z-плоскости с выборкой по времени с помощью билинейного преобразования, известного как преобразование Тастина.
Результатом данного отображения является то, что устойчивая область в Z-плоскости превращается в окружность с радиусом, равным 1, в так называемую единичную окружность (рис. 17).

Рис. 17. Единичная окружность Z-плоскости
Удаленный правый край окружности (w = 0) представляет собой постоянный ток. Удаленный левый край окружности представляет собой частоту наложения спектров. Любые полюса, которые лежат вне этого круга, будут неустойчивыми. Полюса петли обратной связи теперь могут быть нанесены в Z-плоскости. Положения полюсов представляют нормированные отклики на частоту дискретизации, в отличие от сигналов непрерывных по времени, как это представлялось в S-плоскости.
Цифровая компенсация, во-первых, использует частоту дискретизации цифрового сигнального процессора, которая намного выше, чем системная частота перехода, так что любые расчеты являются точными. Для того чтобы найти значения параметров компенсации, здесь возможны два общих подхода. Первый — переработка в цифровую форму параметров компенсации на основе первичной разработки аналоговой системы управления, а второй — прямая разработка уже непосредственно цифрового управления. При переносе аналогового управления в цифровой вариант первоначально устанавливается линейная модель импульсного преобразователя. Причем компенсация петли обратной связи моделируется обычно в S-плоскости. А потом, для того чтобы завершить проектирование уже цифровой компенсации, результаты полученной аналоговой компенсации отображаются в z-плоскость. При непосредственном подходе к проектированию цифрового управления дискретная модель импульсного преобразователя является полностью моделируемой с использованием цифрового управления, а решение в части компенсации рассчитывается непосредственно в Z-плоскости. Это требует применения точных моделей всех аналоговых элементов, а моделирование осуществляется с помощью таких программ, как Spice или Matlab.
Результат обоих методов один и тот же — рассчитанная матрица значений сохраняется как таблица преобразования. DSP или микроконтроллер будут получать оцифрованный входной сигнал, вводить его для вычисления в матрицу, а на выходе иметь полученное значение либо как аналоговый сигнал управления, либо, что используется чаще всего, как скорректированный выходной сигнал управления непосредственно самого ШИМ-драйвера. В последнем случае схемы компаратора и цепи формирования ШИМ также будут синтезированы в цифровом виде. Это исключает ошибки контура аналогового управления, связанные с компенсацией наклона, и нестабильность RHP. Если требуется обрабатывать иной режим работы компенсации обратной связи на отклик, то цифровой контроллер может плавно переключаться между таблицами преобразования без сброса выхода преобразователя. Это уникальная способность, не свойственная аналоговым контроллерам. Таким образом, количество компромиссов, которым нужно следовать при выборе необходимой характеристики компенсации, значительно снижается.
Именно это отсутствие компромиссов и способность буквально мгновенно переключаться между быстрой переходной характеристикой или стабильным выходом и делает цифровой контур обратной связи таким привлекательным. Поскольку стоимость микроконтроллеров продолжает снижаться, то все больше и больше DC/DC-преобразователей будут мигрировать в сторону контроллеров с полностью цифровыми или гибридными петлями обратной связи.
Цифровая петля обратной связи
На схеме, приведенной на рис. 18, показан упрощенный DC/DC-преобразователь, выполненный на базе микроконтроллера. Все его временные диаграммы находятся под цифровым управлением, как сам мостовой преобразователь, так и его выходной синхронный выпрямитель.
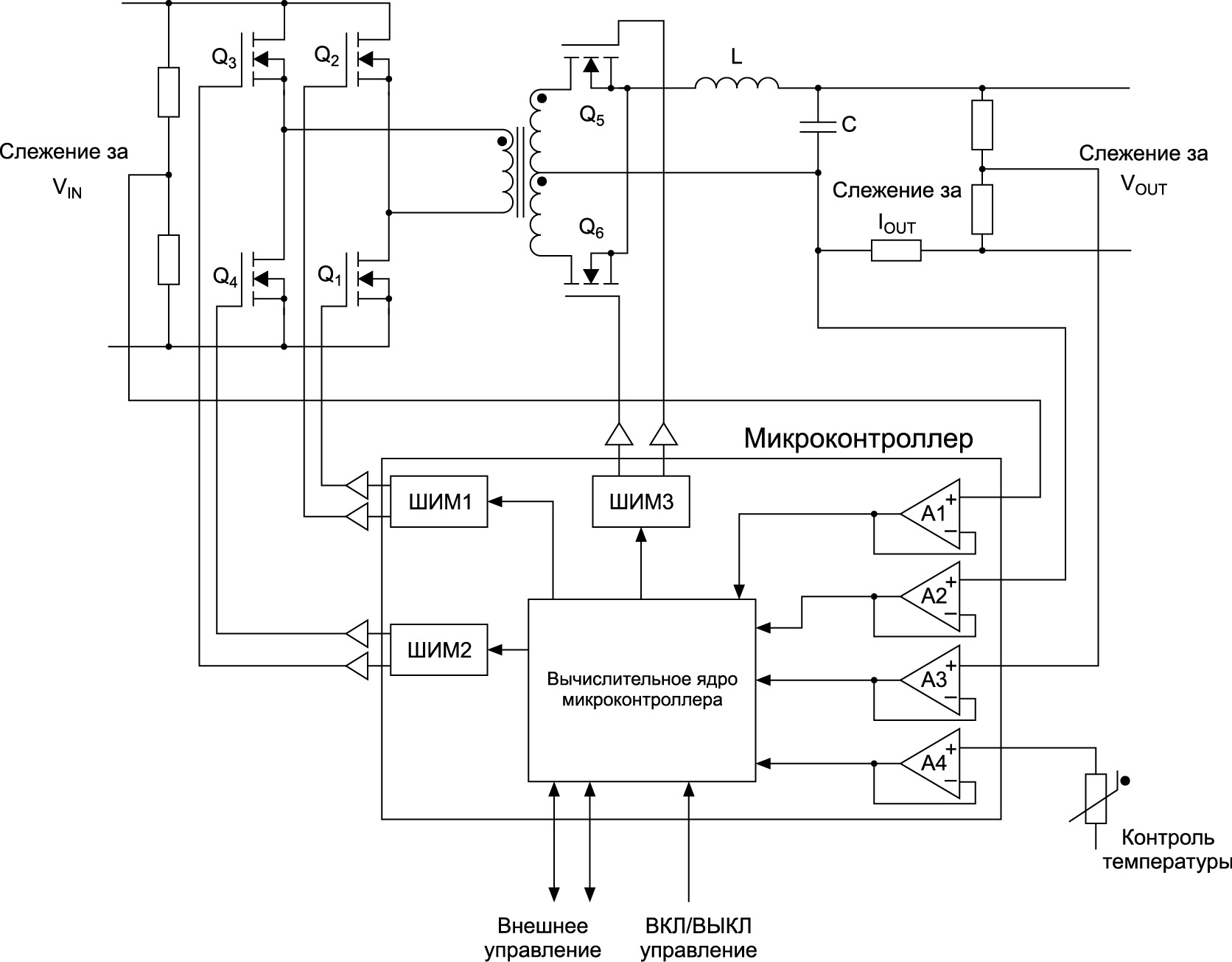
Рис. 18. DC/DC-преобразователь с цифровым управлением, выполненный на базе микроконтроллера
Микроконтроллер содержит встроенные операционные усилители, таким образом, входы датчиков могут быть подключены непосредственно к самому микроконтроллеру. Поскольку микроконтроллер получает информацию относительно входного напряжения, выходного напряжения и выходного тока, нет необходимости в дополнительных внешних цепях, которые требуются для контроля короткого замыкания или перегрузки. Контроль входного напряжения позволяет осуществить как контролируемый запуск (мягкий старт), так и программируемую блокировку с адаптивным гистерезисом в случае питания преобразователя недопустимо пониженным входным напряжением. Четвертый входной операционный усилитель используется для контроля температурного режима. Это может быть контроль либо температуры внутри самого DC/DC-преобразователя, либо температуры удаленной нагрузки. Последующая реакция в случае чрезмерного возрастания температуры программируется в соответствии с техническими требованиями приложения. Например, для того чтобы уменьшить тепловыделение, здесь может быть использована остановка с защелкой, отключение и автоматический перезапуск системы после охлаждения (ее или полезной нагрузки), а также ограничение мощности. Подключение внешних данных позволяет реализовать такие рабочие условия, которые будут обновляться буквально на лету. Возможны и различные варианты предварительно запрограммированных действий, которые должны быть выбраны соответствующим образом. Кроме того, имеющаяся двунаправленная шина связи разрешает отправлять сообщения о неисправностях и обновления статуса.

Рис. 19. Блок-схема программного обеспечения для контроллера DC/DC-преобразователя с цифровым программным управлением на базе микроконтроллера
На рис. 19 в общем виде показана внутренняя работа системы. Различные подпрограммы контроллера используют просмотровые таблицы в виде матриц для вычисления соответствующего управляющего воздействия в режиме реального времени. Характеристическое уравнение для режима управления по току (CMC) имеет вид (11) (при обращении к первоисточнику [1] учтите, что в формулах 11 и 12 его автором был допущен ряд неточностей).

Здесь: VOUT — внутренний контур регулирования, VOUT* — внешний контур регулирования , RA — токовый пропорциональный компенсатор усиления, а Ki и KP могут быть получены из матрицы (12).

В соответствии с условиями эксплуатации системный контроллер может переключаться «в» или «из» различных матричных таблиц. Преимуществом применения цифрового контроллера также является значительное уменьшение общего количества элементов в его спецификации и обеспечение интеллектуального управления выходным напряжением и током.
Итак, мы рассмотрели практически все основные вопросы, связанные с такой проблемой, как обеспечение стабильности выходного напряжения и что нужно учитывать для ее достижения. Данная статья поможет понять, как осуществить правильный выбор компонентов обратной связи и ее компенсации. Это особенно важно не только для понимания происходящих процессов, но и для выбора элементов компенсации контура обратной связи. Для многих преобразователей эти элементы являются внешними, их выбирают исходя из конкретных условий применения определенной микросхемы контроллера DC/DC-преобразователя.
Литература
- Steve Roberts. DC/DC BOOK OF KNOWLEDGE: Practical tips for the User. Second Edition, 2015.
Собрал дуальный повышающий-инвертирующий ШИМ преобразователь на BD9851. Есть в схеме парочка непоняточек.
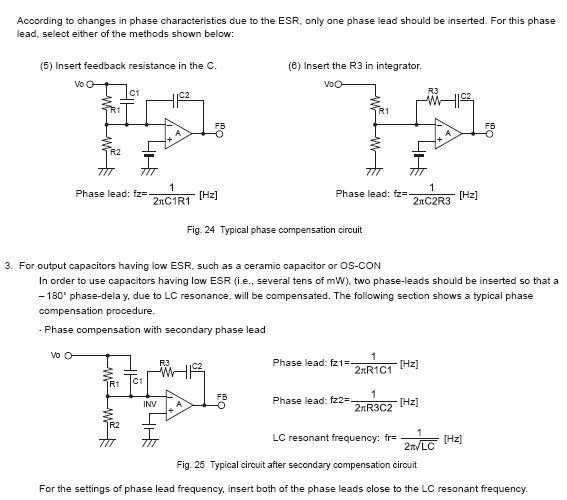
Выход с обратной связи усилителя сигнала ошибки соединяется с входом ОУ через RC цепочку. В даташите описывается ее назначение как «компенсация фазы». По идее все RC рассчитываются простой школьной формулой, на выходе которой мы имеем некую частоту. Не могли бы вы прояснить физический смысл компенсации фазы. По какой из классических схем тут включен и действует ОУ. К чему тут надо стремиться и как рассчитать этот участок, т.к. в даташите никаких типовых параметров.
Также вопрос: зачем в делителе напряжения, что мониторит выходное напряжение преобразователя, одно из плеч (то, что к выходному напряжению) зашунтировано RC? Назначение? И как здесь рассчитываются элементы?
ZZZAMK, на Ваши вопросы просто так не ответишь, потому что у Вас после этого появятся ещё более сложные вопросы… ![]()
Найдите какую нибудь литературу по импульсным источникам питания, там и найдёте хотя бы общие ответы на свои вопросы.
Например, не плохо всё описано в книге Марти Брауна «Источники питания, расчёт и конструирование».
В конце книги, в приложении есть глава «Компенсация контура обратной связи», там всё написано — и теория и примеры.
Вот! Видите! Спасибо! Пошел качать книжку искать!
Ни чего не вижу… ![]()
Книгу я скачивал, кажется с Натахауз-а. Если не найдёте — свистните.
спасибо, DWD, себе тоже скачал. хорошая книга.
Надо по смыслу тему дополнить данными.
Значит, так я думаю, что когда народ делает DC-DC преобразователи, то слизывает типовую схему из даташита и о грамотной копменсации фазы речи не идет, все на глазок. Если бы в моем даташите была такая схема — я бы голову не забивал, но пришлось.
Вы меня отослали к книжкам — я их почитал, там очень много умного написано, целые главы посвящены, но без пол-литры не разбересси.
Подход такой. В 2х словах есть в контроллере операционный усилитель, который глядит за выходным напряжением. И «…для устойчивой работы замкнутых обратными связями преобразователей, необходимо, чтобы коэффициент усиления разомкнутого контура стал меньше единицы до того, как фазовый угол достигнет значения -180 гр. Кроме того, в области среза должен быть сформирован наклон ЛАХ (логарифмическая амплитудная характеристика) разомкнутой системы -20дБ/Дек, а в области низких частот коэффициент усиления должен быть достаточно большим для того, чтобы снизить погрешность при измерениях входного напряжения и тока нагрузки…»
Оно все вроде бы логично и понятно, но когда надо посчитать реальные цифры — поглядите в книжку, там цифры, там графики, там формулы — черт ногу сломит.
А вот в этом вот аттаче по-басурмански, но в то же время по божески написано.
Т.е. мы считаем частоту индуктора-выходной емкости по детской формуле для LC. Потом для этой же частоты по детской формуле RC считаем сопротивление и емкость в цепи обратной связи. А если у нас выходной конденсатор низкого сопротивления, то по этой же формуле еще раз считаем следующий конденсатор и пару для него берем сопротивление из высокого плеча делителя выходного напряжения.
Правда там не сказано, от чего отталкиваться, выбирая соотношение для величины емкости и сопротивления. Т.е. знаем частоту, знаем формулу, но два неизвестных.
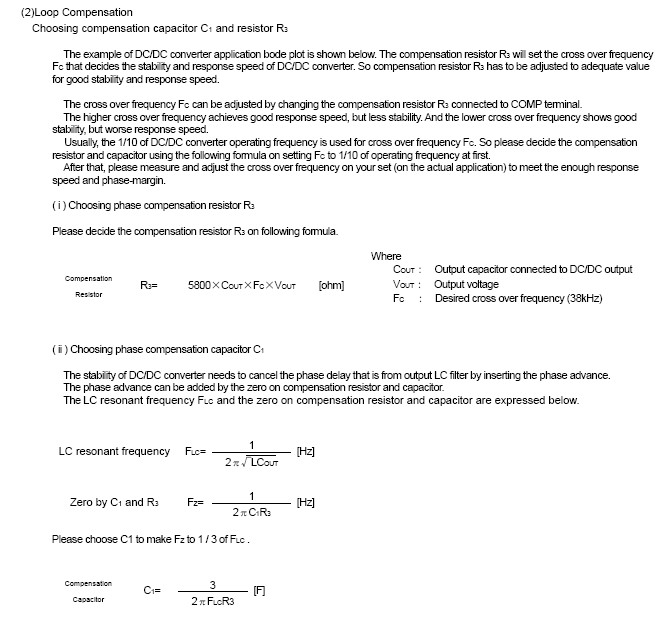
А вот в этом басурманском аттаче есть эмпирическая формула для подбора велиличны сопротивления в цепи обратной связи ОУ. R = 5800 * Cвых * Fперекрест * Vвых, где Fперекрест — численно принимается 1/10 от частоты работы преобразователя.
У меня вот получилось 100 КОм и 200 пикушек надо ставить.
Правда почему-то во 2м аттаче они емкость считают отталкиваясь от 1/3 частоты LC, что вносит несуразицу, т.к. в 1м аттаче считалось ровно по частоте LC. Но хотя бы примерный порядок для подбора величин эти данные простому юзеру дают.
Да, разобраться с коррекцией без «пол-литры» трудно.
Я несколько раз «тренировался», но так толком ни чего не понял до сих пор… ![]()
Сам автор пишет, что большинство специалистов не могут нормально расчитать эту «хитрую» коррекцию, по этому я, как не специалист, перестал комплексовать по этому поводу. ![]()
В общем, для каждой топологии есть своя схема компенсации, а эти схемы могут иметь ещё варианты. Если не заниматься проектированием ИБП постоянно, то вряд ли стоит изучать все эти тонкости. Тем более, что в даташитах, бывает, приводится типовой расчёт. Можно, так же, пользоваться готовыми программами, специализированными по расчёту БП на микросхемах одного производителя. Практически каждая фирма, производящая мс для ИБП делает и выкладывает на своём сайте такие проги.
В общем, теория теорией, а жизнь жизнью!
Позаписал я на осциллограф выходные напряжения преобразователя при разных нагрузках — и ужаснулся: напряжение пилообразное, резко возрастает и постепенно снижается с частотой десятки Гц.
К черту все вышеуказанные формулы. Выкинул нафиг расчетные детали из цепи обратной связи. И методом опытного подбора подобрал номиналы, проверяя качество выходного напряжения. Получилось нечто, похожее на номиналы из типовых схем. Единицы нанофарад и единицы кОм.
Ну, правда, не всю теорию забыл, а посчитал частоту LC и по той же частоте делал соотношение RC.
что и ТД тоесть в даташите в примерах уже указаны оптималные или близкие номиналы
Пора бы, пожалуй, продолжить излагать принципы правильного построения драйверов (и не только драйверов кстати сказать). Но в этот раз, боюсь, для подготовленных читателей:)
В прошлых сериях:
Драйверостроение Ч. 0: вступительная или пилотный эпизод
Драйверостроение ч. 1: Как соединять диоды?
Драйверостроение ч.2: Практическая или из дерьма и палок
Драйверостроение ч. 3: Драйверы бывают разные…
Выбор силовой схемы мы рассмотрели, но это лишь пол-драйвера. Поскольку он стабилизирует ток им надо управлять — менять коэффициент заполнения таким образом, чтобы выходной ток оставался неизменным (или не более установленного) — это называется регулирование.
Вообще, выходное напряжение (или ток) подчиняется строгим законам — закону регулирования импульсного преобразователя: Uвых=D * Uвх для понижающего, или Uвх=Uвх * (1/(1-D)) для повышающего преобразователя.
Но поскольку входное напряжение изменяется, изменяются падения напряжения на транзисторах, диодах, обмотках дросселей необходима система автоматического регулирования (САУ). Теория САУ очень обширная область знания, особенно в плане устойчивости, поэтому тут мы рассмотрим чистую практику.
Чтобы измерить ток в цепь его протекания обычно включают шунт — резистор с которого снимают напряжение. Например при выходном токе 0,5 А мы используем шунт 0,2 Ом, таким образом падение напряжения на нем будет 0,1 В — его мы должны сравнивать с опорным (Reference) при помощи усилителя ошибки (GM Amplifier в нашем примере)
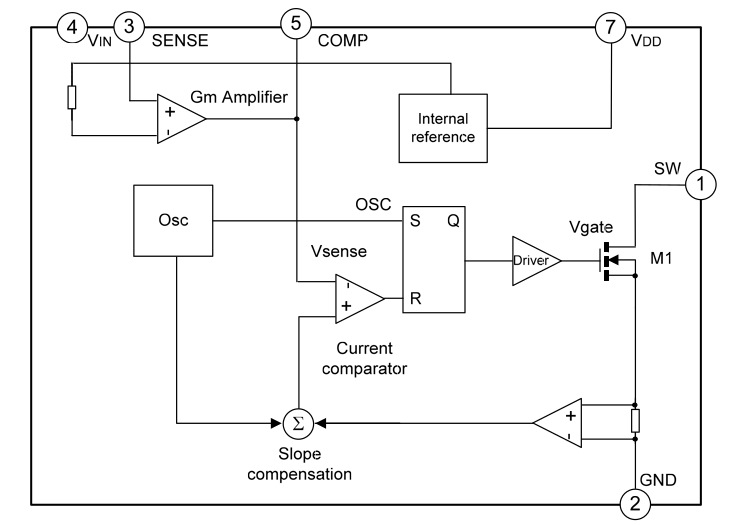
Сигнал с выхода усилителя ошибки подается на вход ШИМ-компаратора (Current comparator), его пока оставим в покое. Обычно выход усилителя ошибки выведен наружу под именем COMP — на него вешается RC цепь или просто конденсатор (часто в стабилизаторах тока) являющиеся цепями компенсации исключающими неустойчивость схемы управления. Из теории стоит привести критерий устойчивости: усиление в петле обратной связи при росте частоты должно упасть ниже единицы до того как вращение фазы сигнала не достигнет 180 градусов. То есть усилитель должен уже ничего не усиливать в тот момент когда сигнал обратной связи становится инверсным на некой частоте. Иначе схема стабилизации станет генератором. Но на практике цепи компенсации чаще всего выбираются из рекомендаций даташитов и подбор почти никогда не требуется.
Поэтому сосредоточимся на главной проблеме — работе непосредственно ШИМ-компаратора. Существуют два основных принципа ШИМ-регулирования: токовый и по напряжению.
Метод регулирования по напряжению предполагает что в компараторе сигнал усилителя ошибки сравнивается с сигналов внутреннего генератора пилообразного напряжения, он используется в сетевых двухтактных блоках питания и описан в документации к микросхеме TL494 (в т.ч. на русском языке).
А вот в DC/DC преобразователях (обычно в любых преобразователях с дросселем, т.е. с накоплением энергии в индуктивности) принято использовать токовое управление, как в приведенной выше схеме — в цепь истока ключа включен шунт напряжение с которого (пилообразное к слову — ток через дроссель ведь пилообразный) сравнивается компаратором с напряжением ошибки.
Что он нам дает? а вот что:
— ток через ключ ограничен, схема не боится КЗ, ее нельзя сжечь,
— регулирование хорошо работает в любых режимах — КЗ, обрыв нагрузки, запуск
— одним компаратором контролируется ток ключа, ток нагрузки.
Вообще попытки сделать DC/DC без контроля тока ключа — честно говоря явное дилетанство. Не надо так делать
Но есть еще один немаловажный момент, это работа преобразователя с большими коэффициентами заполнения (характерно кстати для понижающего драйвера с питанием от 12 В работающего на три диода, то есть 9 В).
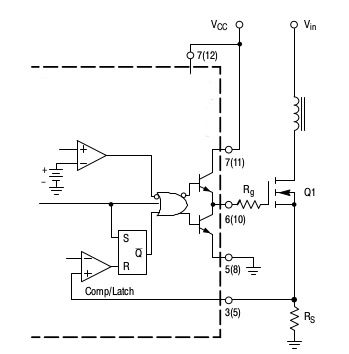
Если разобраться
и сравнить ее с тем что я привел можно обнаружить в первой схеме дополнительный элемент — сумматор (обозначен математическим знаком суммы) который подмешивает сигнал генератора (пилообразный) к сигналу с токового шунта. Делается это потому (если вкратце) что компаратор плохо срабатывает от токового сигнала с малым наклоном который случается особенно часто в режимах с большим D. То есть в тяжелых условиях работы. Возникают так называемые субгармонические колебания тока — компаратор отключает ключ то раньше, то позже. Возникают паразитные колебания, а это лишние помехи и вообще стремно.
Чтобы не быть голословным вот
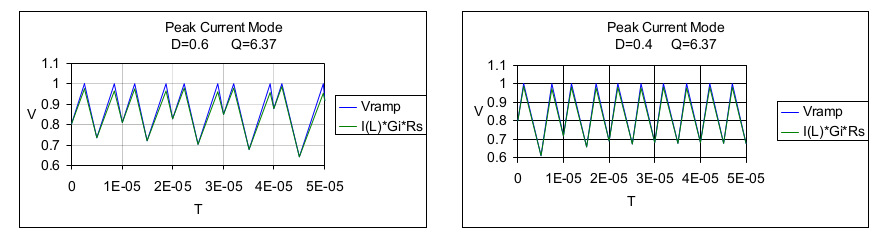
из документа snva555 «UNDERSTANDING AND APPLYING CURRENT-MODE
CONTROL THEORY» от TI.
Так вот подобные навороты — это хороший тон в источниках питания, и я крайне советую без них ничего серьезного не делать. Или делать на свой страх и риск.
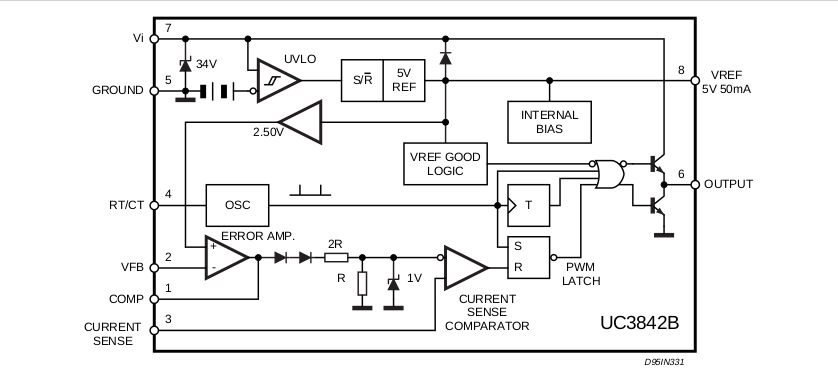
В схемах на микросхемах вроде UC3843 такое улучшение делается внешними элементами (читать рекомендации по применению, к примеру sluu176 от TI). А вот для микросхем с интегрированными ключами (а они чаще всего используются) наличие внутри такой схемы, т.н. Slope Compensation, является хорошим тоном.
Например, заглянем в даташит популярной PT4115
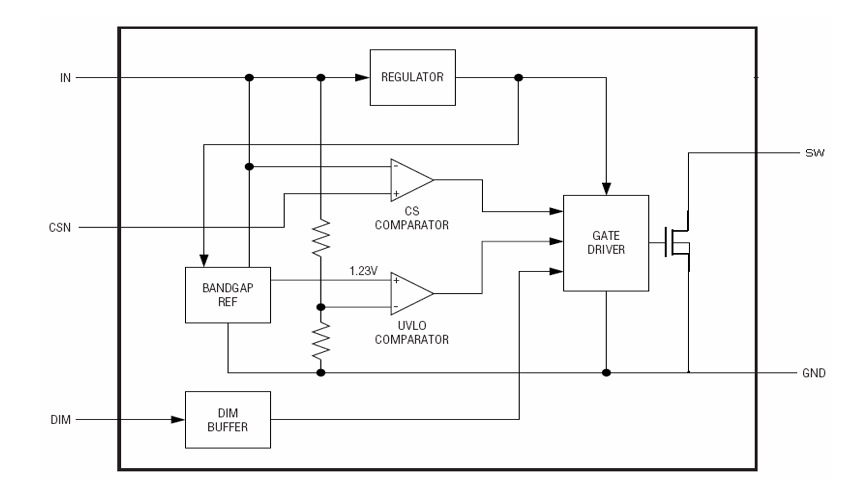
Контроля тока ключа не нарисовано, никаких сумматоров и Slope Compensation в помине и нет. Токового управления нормального нет. Может в ней какие-то другие схемы реализованы? А может работает на честном слове и ладно. Только ЭМС не ждите от таких драйверов.
Есть гораздо более печальный пример — НV9910 которую часто применяют китайцы, не имеющую вообще ШИМ-регулирования, а только кривое частотное. В условиях низких разниц напряжений вход-выход она очень часто теряет устойчивость, что видно по китайским балкам жгущим автомобили.
Есть более новый аналог у которого вроде нет явных косяков по устойчивости — HV9961, ее применяют в изделиях фирмы PROLIGHT. Но я бы все равно не стал бы применять микросхемы сетевых драйверов в бортсети авто, мало ли что.
Выбирайте правильные микросхемы, и да прибудет с вами устойчивость!)
PS: для пополнения более основательных знаний в области силовой электроники можно почитать книжку Б.Ю. Семенов. Силовая электроника.. Думаю не имеет смысла мне тут переписывать ее содержание)
Большинство разработчиков считает, что хорошим решением является установка на выходе преобразователя керамических конденсаторов, так как они достаточно дешевы, выпускаются множеством производителей и имеют низкое эквивалентное последовательное сопротивление (ESR). Они и в самом деле хороши для фильтрации выходного напряжения конвертера в случае, если требуется относительно небольшая емкость. Благодаря низкому значению ESR установка керамических конденсаторов позволяет уменьшить уровень выходных пульсаций. Однако из-за малого ESR, присущего керамическим конденсаторам, при использовании их на выходе преобразователя необходимо применять корректирующие цепи типа III. Эти цепи, более сложные, чем цепи типа II, описаны в предлагаемой статье.
Функциональная схема понижающего преобразователя
Функциональная схема понижающего преобразователя показана на рис. 1, где Vin и Vout — соответственно входное и выходное напряжения преобразователя. Усилитель сигнала ошибки и сопутствующие ему пассивные компоненты образуют цепь компенсации («Коррекция»). Основное внимание в данной статье уделяется правильному выбору этих пассивных компонентов для достижения требуемых показателей. Выходным сигналом корректирующих цепей является аналоговый управляющий сигнал Vc. Широтно-импульсный модулятор («Модулятор») генерирует импульсы с коэффициентом заполнения D, пропорциональным значению Vc. Силовые ключи, коммутирующие напряжение Vin соответствующими управляющими импульсами, в сочетании с фильтром формируют требуемое выходное напряжение Vout.

Рис. 1. Функциональная схема понижающего преобразователя
Передаточная функция разомкнутого контура
Реакция системы на воздействие сигнала от входа модулятора до выхода силового каскада называется передаточной характеристикой разомкнутого контура. Она показана на рис. 2. Выходной LC-фильтр имеет спад передаточной функции с уклоном –40 дБ/декаду (двойной полюс) и фазовый сдвиг –180°. Частота двойного полюса фильтра ƒLC вычисляется по формуле:

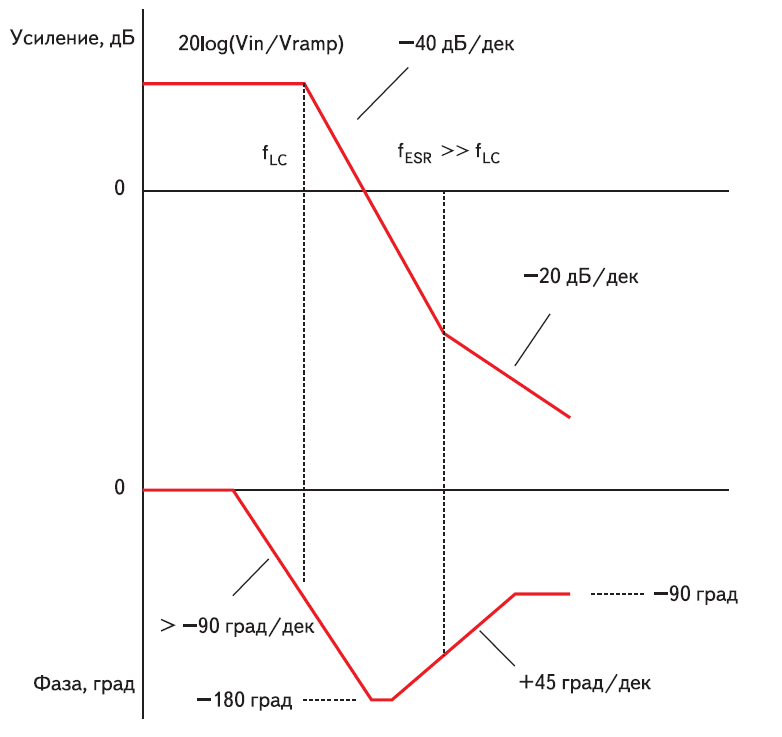
Рис. 2. Частотные характеристики разомкнутого контура преобразователя с небольшим керамическим конденсатором на выходе
Эквивалентное последовательное сопротивление выходного конденсатора C смещает нулевую точку и обеспечивает фазовый сдвиг +90°. Нулевая частота ƒESR, получающаяся в результате влияния ESR, рассчитывается по следующей формуле:

На рис. 2 показаны два графика, на верхнем представлена зависимость коэффициента усиления разомкнутого контура от частоты (в логарифмическом масштабе), а на нижнем — соответствующий фазовый сдвиг. Если на выходе стоит небольшой керамический конденсатор, ƒESR может оказаться значительно больше, чем ƒLC. В этом случае фазовый сдвиг в разомкнутом контуре достигнет –180° раньше, чем полюс, вносимый ESR, начнет уменьшать его до –90° (рис. 2).
Задачи коррекции
Целью компенсации является разработка устойчивой системы с обратной связью, в данном случае — преобразователя, который будет быстро реагировать на изменение входного напряжения и нагрузки таким образом, чтобы выходное напряжение оставалось стабильным. Для обеспечения высокого быстродействия системы необходимо, чтобы частота среза ƒC (или полоса пропускания), была как можно выше. Обычно корректирующая цепь разрабатывается таким образом, чтобы выполнялось условие (ƒS/10)<ƒC<(ƒS/5), где ƒS — частота переключений преобразователя. Критерий устойчивости требует, чтобы запас по фазе на частоте ƒC был больше 45°, где:
Запас по фазе = 180° + фазовый сдвиг коэффициента усиления замкнутой цепи.
Необходимо сформировать такие амплитудно-частотные и фазо-частотные характеристики усилителя сигнала ошибки, чтобы частотные характеристики всего разомкнутого контура (рис. 2), включающего этот усилитель, удовлетворяли приведенным выше требованиям.
Коррекция типа III
Коррекция типа III реализуется путем подключения резисторов и конденсаторов к интегральному усилителю сигнала ошибки контроллера, как показано на рис. 3. Здесь используется номенклатура компонентов, рекомендуемая в справочниках фирмы Sipex. Передаточная функция типа III имеет два нуля и два полюса на частотах, показанных на рис. 3. Суммарное воздействие нулей приводит к смещению фазы на 180°. Этот подъем фазы нужен для того, чтобы компенсировать запаздывание на 180°, вносимое двойным полюсом выходного фильтра (рис. 2), и получить требуемый запас по фазе. Для упрощения реализации второго нуля и первого полюса компоненты должны быть выбраны так, чтобы выполнялись условия CZ2>>CP1 и R1>>RZ3. Дальнейшее упрощение можно получить, если сделать частоты обоих нулей совпадающими. Как сказано выше, задача состоит в том, чтобы расположить полюсы и нули коррекции так, чтобы получить требуемую полосу пропускания и соответствующий запас по фазе.

Рис. 3. Коррекция типа III и соответствующие ей амплитудно-частотная и фазо-частотная характеристики
Шесть резисторов и конденсаторов, подключенных к усилителю сигнала ошибки, как показано на рисунке, образуют цепь коррекции типа III. Номенклатура компонентов выбирается в соответствии с рекомендациями фирмы Sipex. Для упрощения реализации частоты второго нуля и первого полюса выбираются, исходя из условий CZ2>>CP1 и R1>>RZ3.
Процедура расчета компонентов для коррекции типа III
Как ранее упоминалось, при использовании на выходе керамического конденсатора фазовый сдвиг в разомкнутом контуре обычно составляет –180° или около того. Для получения требуемого запаса по фазе в 45° или больше (то есть фазового сдвига, превышающего –135°) коррекция типа III должна обеспечить требуемый подъем фазы. Предположим, что запаздывание по фазе в разомкнутом контуре системы максимально возможное, то есть 180°. Чтобы получить в замкнутом контуре минимальный требуемый запас по фазе в 45°, коррекция должна обеспечить подъем фазы на 95°. Для обеспечения максимального подъема полюсы и нули должны располагаться как можно дальше друг от друга. Таким образом, процедура расчета номиналов компонентов выглядит следующим образом:
-
- Пусть R1 = 68,1 кОм (реально такая точность не требуется, для обеспечения устойчивости вполне достаточно выбирать номиналы компонентов с разбросом 5–10% (прим. переводчика)). Этот номинал обеспечивает требование R1>>RZ3.
- Выберем частоту второго нуля равной 60% частоты двойного нуля выходного фильтра и определим CZ3:

где L и C — соответственно индуктивность и емкость выходного фильтра; zsƒ — масштабирующий коэффициент нуля (Zero scale factor), равный 0,6.
3. Для получения требуемой полосы пропускания ƒC вычислим RZ2 при помощи следующего выражения:

где Vramp — амплитуда пилообразного напряжения (см. таблицу) и Vin — входное напряжение преобразователя; ƒC обычно выбирается равным от 1/5 до 1/10 частоты переключений ƒS .
|
Тип контроллера |
Амплитуда пилообразного напряжения (В) |
|
SP6132/H |
1,1 |
|
SP6133 |
1,0 |
|
SP6134/H |
1,1 |
|
SP6136 |
1,0 |
|
SP6137 |
1,1 |
|
SP6138 |
1,0 |
|
SP6139 |
1,1 |
4. Примем первый ноль равным второму и найдем CZ2 по следующей формуле:

5. Установим первый полюс равным частоте переключений преобразователя ƒS и найдем CP1:

6. Установим второй полюс также равным ƒS и найдем RZ3:
Пример 1. Рассчитаем элементы коррекции для понижающего преобразователя со следующими характеристиками:
- Vin = 12 В
- Vramp = 1,1 В
- ƒS = 900 кГц
- L = 2,2 мкГ
- C = 22 мкФ
- ESR = 3 мОм.
Примечание: расчет номиналов компонентов, обсуждаемый в этой статье, можно легко сделать при помощи калькулятора коррекции типа III (Type III Loop Compensation Calculator), находящегося в Интернете по адресу www.sipex.com/files/Application-Notes/TypeIIICalculator.xls.
Частоты ƒLC и ƒESR, рассчитанные в соответствии с показанными выше выражениями 1 и 2, равны соответственно 22,9 кГц и 2,4 МГц. Так как ƒESR/ƒLC = 105, то очевидно, что можно использовать коррекцию типа III.
Выберем ƒC = ƒS/9 и, пользуясь приведенной методикой, получим:
- R1 = 68,1 кОм
- CZ3 = 170 пФ
- RZ2 = 17,2 кОм
- CZ2 = 673 пФ
- CP1 = 10,2 пФ
- RZ3 = 1,04 кОм.
На рис. 4 показан результат SPICE-моделирования цепи коррекции типа III для полученных номиналов компонентов.

Рис. 4. SPICE-моделирование показывает, что для zsf = 0,6 полоса пропускания системы больше 100 кГц и соответствующий запас по фазе равен 70°
Практические соображения (настройка отклика системы)
Отправной точкой в описанной выше процедуре явилось расположение нулей на частоте, равной 60% от ƒLC (то есть zsƒ = 0,6). Обычно такие условия позволяют получить достаточную коррекцию. Как показано на рис. 4, запас по фазе около 70° вполне приемлем. Он обеспечивает компромисс между временем реакции системы и ее устойчивостью. Как показано на рис. 5, время реакции составляет 75 мкс, что не является впечатляющим результатом для преобразователя, работающего на частоте 900 кГц. Для более активной коррекции (то есть для ускорения переходного процесса) необходимо выбирать частоту нулей, близкую к ƒLC или несколько больше нее (то есть zsf ≥ ƒLC). Например, для уменьшения времени реакции системы в примере 1 зададим zsƒ = 1,2. Пересчитав номиналы компонентов для примера 1, получим:
- R1 = 68,1 кОм
- CZ3 = 85 пФ
- RZ2 = 34,4 кОм
- CZ2 = 168 пФ
- CP1 = 5 пФ
- RZ3 = 2,08 кОм.

Рис. 5. Реакция на изменение нагрузки от 0 до 2,5 А при умеренной коррекции (время переходного процесса 75 мкс)
Амплитудная и фазовая характеристики нового варианта в сравнении с исходным показаны на рис. 4. Как видно из графиков, усиление на средних частотах увеличилось на 10 дБ, а запас по фазе уменьшился на 10° при минимальном фазовом сдвиге около 30°. Переходная характеристика показана на рис. 6. Видно, что время реакции уменьшилось (улучшилось) примерно до 20 мкс.

Рис. 6. Переходная характеристика при агрессивной коррекции; переходный процесс уменьшился (улучшился) до 20 мкс
Выводы
При некотором творческом подходе с помощью небольшого количества недорогих дискретных компонентов компенсация типа III может значительно улучшить быстродействие схемы при сохранении ее устойчивости. Особенно ценным свойством такого способа коррекции является возможность использования на выходе преобразователя недорогих керамических конденсаторов.
Литература
- Страница поддержки: http://www.sipex.com/content.aspx?p=support
- Живой технический чат: http://www.geolink-group.com/sipex/
- Калькулятор для расчета коррекции типа III: www.sipex.com/files/Application-Notes/TypeIIICalculator.xls
Компенсация обратной связи на TL494 (усилитель ошибки)
Присоединяйтесь к обсуждению
Вы можете написать сейчас и зарегистрироваться позже.
Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.