ПИ-регулятор
(изодромный
регулятор)


![]() ;
;
на
низких частотах преобладает интегрирующий
эффект (отсутствует статическая ошибка),а
на высоких частотах – эффект от
![]()
(качество переходного процесса лучше,
чем при И-законе регулирования).
![]()
– закон
регулирования.
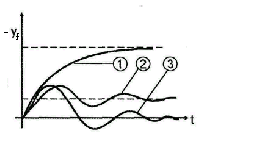
-
– отсутствие
регулятора; -
–
П-регулятор; -
–
ПИ-регулятор.
Достоинства:
-
Простота
реализации; -
Существенно
улучшает точность регулирования в
статике:
• Установившаяся
ошибка при постоянном входном воздействии
равна нулю;
• Эта ошибка
нечувствительна к изменениям параметров
объекта.
Недостатки:
повышается астатизм системы на единицу
и, как следствие, снижение запасов
устойчивости, увеличивается колебательность
переходного процесса, увеличивается
![]() .
.
Реализация
ПИ-регулятора


ПИД-регулятор
На
низких частотах преобладает интегрирующий
эффект, а на высоких – дифференцирующий.

![]() .
.
![]()
– закон
регулирования.
Статическая система
при установке ПИД-регулятора становится
астатической (статическая ошибка равна
нулю), однако в динамике астатизм
снимается за счет действия дифференцирующей
составляющей, т. е. качество переходного
процесса улучшается.
 Достоинства:
Достоинства:
-
Высокая
статическая точность; -
Высокое
быстродействие; -
Большой
запас устойчивости.
Недостатки:
-
Применимы
для систем, описываемых
дифференциальными
уравнениями невысокого
порядка,
когда объект имеет один или два полюса,
или
может быть аппроксимирован моделью
второго
порядка.
-
Требования
к качеству управления низкие.
Реализация ПИД-регулятора
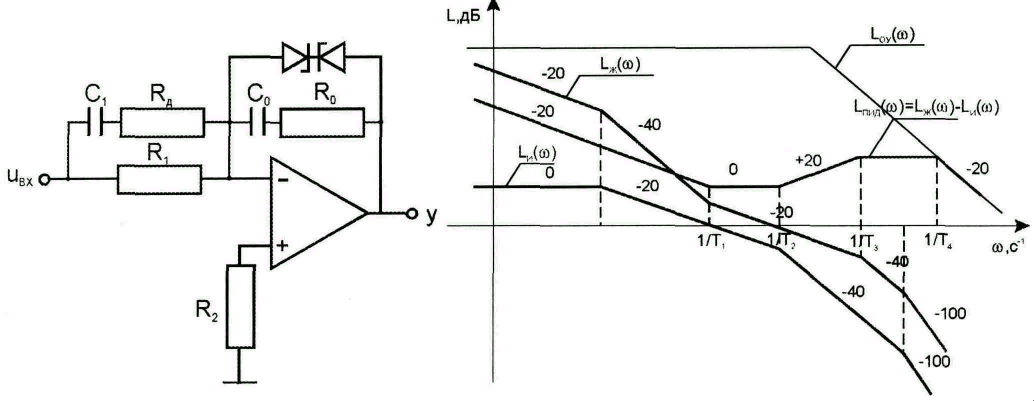

где
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
причем
![]() .
.
По
ЛАЧХ операционного усилителя определяем
![]() .
.
Тогда передаточная функция реального
регулятора имеет вид
![]() .
.
В
системах чаще всего применяется
ПИД-регулятор.
Расчёт систем
комбинированного управления
Комбинированное
– такое управление в автоматической
системе, когда наряду с замкнутым
контуром регулирования по отклонению
используется внешнее компенсирующее
устройство по задающим или возмущающим
воздействиям.
Принцип инвариантности
– принцип компенсации динамической и
статической ошибок независимо от формы
входного воздействия по каналу управления
или компенсации возмущающего воздействия.
-
Расчет
компенсирующих устройств по каналу
возмущения
Пусть
структурная схема исходной системы
преобразована к виду, изображенному на
рис.1.
Перенесем
на вход системы точку приложения
возмущения (рис. 2).

Запишем
уравнение для выходной координаты:
![]() .
.
Влияние
на выходную функцию со стороны возмущения
f
будет отсутствовать, если выполняется
условие абсолютной
инвариантности
системы к возмущающему воздействию:
![]() —
—
условие полной компенсации возмущения.
Внешние
регуляторы используются для получения
инвариантности по каналу возмущения с
точностью до .
Пример.
Пусть объект и регулятор ведут себя как
апериодические звенья. Наибольшая
постоянная времени, как правило,
принадлежит объекту.
Тогда
![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() ,
,
![]() .
.
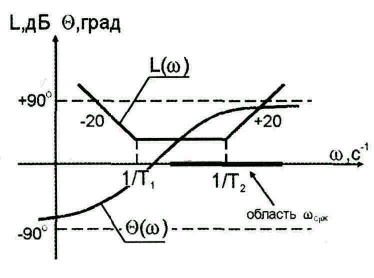
Графики
на рис. 3.
1/Тp
Компенсирующая цепь должна обладать
дифференцирующими свойствами, причем
активными дифференцирующими свойствами
на высоких частотах (так как характеристика
отчасти располагается выше оси частот).
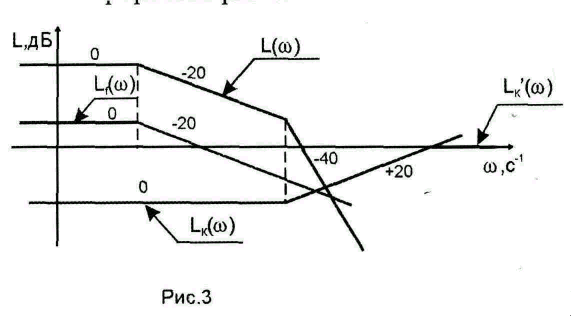
1/Т0
Достижение абсолютной инвариантности
невозможно, однако эффект компенсации
может быть значительным даже при простой
компенсирующей цепи, обеспечивающей
реализацию
![]()
в ограниченном диапазоне частот (![]()
на рис. 3).
Технически
трудно и не всегда возможно измерить
возмущение, поэтому при проектировании
систем часто используют косвенные
методы измерения возмущающих воздействий.
2.
Расчет
систем с компенсацией динамической
ошибки по каналу управления
y1
y1+u-y
Для этой системы,
структурная схема которой изображена
на рис. 4, справедливы следующие
соотношения:

![]() ;
;

=![]()
– передаточная функция по сигналу
ошибки.
Можем
добиться условия полной компенсации
ошибки, если выбрать компенсирующую
цепь с параметрами:
(1) ![]()
– условие абсолютной инвариантности
системы к ошибке по каналу управления.
Передаточная
функция системы с компенсирующей цепью
![]() .
.
В
этом случае
![]() ,
,
![]() .
.
Следящие
системы реализуются астатическими.
Рассмотрим пример для таких систем
(рис.5).

В области высоких
частот дифференцирование второго
порядка в компенсирующей цепи приводит
к насыщению усилителей и размыканию
цепи при высоком уровне помех. Поэтому
осуществляется приближенная реализация,
которая дает ощутимый эффект регулирования.
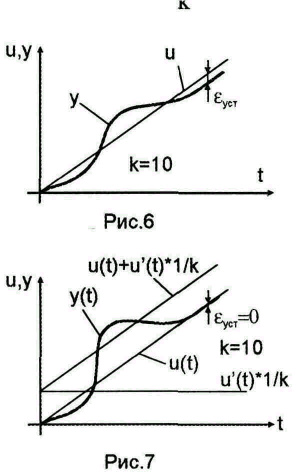
Астатические
системы характеризуются
добротностью
– передаточный
коэффициент
k
определяется при =1
и =k.
Если
k=10,
то ошибка в 10%, так как
![]() ,
,
система низкого качества (рис.6).
Введем
компенсирующую цепь с передаточной
функцией
![]() .
.
Такой цепью может служить тахогенератор,
если
вход
механический. Реализация системы с
малой добротностью
проста.
Пусть
![]() ,
,
из условия (1) получим
![]() .
.
Тогда,
имея систему с астатизмом 1-го порядка,
получим систему с
астатизмом
второго порядка (рис.7).
Всегда
Y
отстает от управляющего сигнала; введя
![]() ,
,
уменьшаем ошибку. Компенсирующая цепь
не влияет на устойчивость.
Как
правило, компенсирующее звено должно
обладать дифференцирующими свойствами
и реализовываться с использованием
активных элементов. Точное выполнение
условия абсолютной инвариантности
невозможно в виду технической
нецелесообразности получения производной
выше второго порядка (в контур регулирования
вводится высокий уровень помех, возрастает
сложность компенсирующего устройства)
и инерционности реальных технических
устройств. Количество апериодических
звеньев в компенсирующем устройстве
проектируют равным числу элементарных
дифференцирующих звеньев. Постоянные
времени апериодических звеньев
рассчитывают по условию работы звеньев
в существенной области частот, т.е.
![]() ,
,
![]() .
.
Соседние файлы в папке Lekcii
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
![]()
disserCat — электронная библиотека диссертаций работаем для вас с 2009 года
- Корзина пуста
Вход
|
Регистрация
Вы робот?
Мы заметили, что с вашего адреса поступает очень много запросов.
Подтвердите, что вы не робот
Нейросетевая компенсация динамических ошибок в позиционной системе управления манипуляционным роботом
Авторы:
Аннотация:
Рассмотрена система позиционного управления трёхзвенным манипуляционным роботом. Проведен обзор публикаций по вопросам нелинейной компенсации динамических ошибок в системах программного управления манипуляционными роботами с использованием нейронных сетей. Представлено математическое описание системы управления с нелинейной компенсацией динамики исполнительного механизма робота. Проведено обучение многомерных нелинейных нейросетевых компенсаторов динамических ошибок, обусловленных действием инерционных, кориолисовых и гравитационных нагрузочных моментов в приводах робота. Разработаны компьютерные модели системы управления с различными вариантами многомерных нейросетевых компенсаторов, включаемые в разомкнутый канал управления и замкнутый контур системы управления. Проведено компьютерное моделирование систем с прототипными и нейросетевыми компенсаторами рассматриваемых типов. Сделан сравнительный анализ динамических ошибок в системах управления с различными комбинациями нейросетевых компенсаторов. Даны рекомендации по программной реализации нейросетевых компенсаторов для реальных позиционных систем управления манипуляционными роботами.
ОЛ ИСАЙИ Е
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (61} Дополнительное к авт. Свил-ву (511) М. Кл.
Ц 05 F 1/56 (22) Зайвлено0?0474 (2I) 2012071/24-07 с нрисое)1инением заявки 36 (23) Приоритет (43) Опубликовано 251278. Бюллетень Рй 47 (45) Дата опубликования описания 28.12.78
Государственный комитет
Совета Министров СССР но дедам изобретений и открытий (53) УДК 621 ° 316
° 722.1 (088.  p2) Авторы изобретений
p2) Авторы изобретений
В.E. Китаев, A.A. Бокуняев, Б.В ° Горбачев, М.Ф. Колканов, С.Н. Прытков и Г.С. Стоянов (73) Заявитель
Московский ордена Трудового Красного Знамени электротехнический институт связи. (54) УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ ДИНАМИЧЕСКОЙ
ОШИБКИ ИСТОЧНИКА ПОСТОЯННОГО
НАПРЯЖЕНИЯ
Изобретение относится к электротех нике и может быть использовано во вторичных источниках электропитания.
Известны устройства для уменьшения динамической ошибки источников электропитания fl) (2) .
Наиболее близким техническим решением к изобретению является устройство для уменьшения динамической ошибки источника постоянного напряже- 10 ния, содержащее блок управления, входом подключенный к измерительной
RC -цепи, соединенной с выводами для подключения к источнику постоянного напряжения, а выходом — с управляющим 15 входом регулирующего транзистора, силовая цепь которого включена между одноименными выводом для подключения к источнику постоячного напряжения и выводом вспомогательного источника постоянного напряжения, другая пара выводов которых соединена непосредственно (2).
Данное устройство не работоспособно в низковольтных источниках постоянного напряжения (менее 5 В),поскольку минимальное напряжение перехода коллектор-эмиттер одного из регулирующих транзисторов может превышать напряжение на выходе источника.
Цель изобретения заключается в расширении диапазона выходного напряжения источника постоянного напряжения.
Это достигается тем, что устройство снабжено вторыми вспомогательным источником и регулирующим транзистором, управляющий вход которого соединен с выходом блока управления, а силовая цепь включена между раэноименными выводом для подключения к источнику постоянного напряжения и выводом второго вспомогательного источника постоянного напряжения, другая пара выводов которых соединена непосредственно.
На чертеже представлена. структурная схема устройства.
Оно содержит блок управления 1, измерительную RC -цепь 2, источник постоянного напряжения 3 с нагрузкой 4„ регулирующие транзисторы 5 и 6, вспомогательные источники пос= тоянного напряжения 7 и 8 °
Устройство работает следующим образом.
При возникновении на нагрузке 4 источника 3 динамической ошибки положительного знака (всплеск напряжения) ее компенсация осуществляется регулирующим — ðàíçèñòîðîì 5 в цепи вспомо638932
Формула изобретения
Составитель Л.Стрелкнн
Техред И.Борисова Корректор А.Власенко
Редактор Л.Народная
Заказ 7279/35 Тираж 99l Подписное цНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий
113035 Москва„, Ж-35 Раушская наб. д. 4 5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4 гательного источника 8, включенного встречно с выходом источника 3, При возникновении на нагрузке 4 динамической ошибки отрицательного анака (провал напряжения) компенсация ее осуществляется регулирующим транзистором 6 в цепи вспомогательного источника 7, включенном согласно с выходом источника 3. При таком включении регулирующего транзистора 5 и вспомогательного источника постоянного напряжения 8 минимальный уровень напряжения источника постоянного напряжения 3 практически не ограничен.
Устройство для уменьшения динамической ошибки источника постоянного напряжения, содержащее блок управления, входом подключенный к измерительной Ю -цепи, соединенной с выводами для подключения к источнику постоянного. напряжения, а выходом— с управляющим входом регулирующего транзистора, силовая цепь которого включена между одноименными выводом для подключения к и» òî÷íèêó постоянного напряжения и выводом вспомогательного источника постоянного напряжения, другая пара выводов которых соединена непосредственно, о т л ич а ю щ е е с я тем, что, с целью расширения диапазона выходного напряжения источника постоянного напряжения, оно снабжено вторыми вспомогательным источником н регулирующим
30 транзистором, управляющий вход которого соединен с выходом блока управления, а силовая цепь включена разноименными выводом для подключения к источнику питания постоянного напряжения и выводом второго вспомогательного источника постоянного напряжениядругая пара выводов которых соединена непосредственно.
Источники информации, принятые во ,@ внимание при экспертизе:
1. Источники электропитания на полупроводниковых приборах. Под ред.
С.Д. Додика, Сов.радио, 1969, с. 225.
2. Авторское свидетельство СССР
9 297038, S 05 F 1/10, 1969.

