6.1. Определения коэффициента ошибок
6.2. Математическое выражение коэффициента битовых ошибок
6.3. Нормы на параметры ошибок систем передачи
6.4. Принципы построения измерителей ошибок
6.5. Техника измерения коэффициента ошибок
6.1. Определения коэффициента ошибок
Коэффициент ошибок – важнейшая характеристика линейного тракта. Он измеряется как для отдельных участков регенерации, так и для тракта в целом. Определяется коэффициент ошибок kОШ, по формуле:
kОШ = NОШ /N, (6.1)
где N – общее число символов, переданных за интервал измерения; NОШ – число ошибочно принятых символов за интервал измерения.
Измерение коэффициента ошибок носит статистический характер, так как получаемый за конечное время результат является случайной величиной. Относительную погрешность измерения в случае нормального закона распределения числа ошибок, что допустимо при N≥10, можно определить по формуле:
 . (6.2)
. (6.2)
Здесь ![]() — коэффициент, зависящий от доверительной вероятности результата измерений:
— коэффициент, зависящий от доверительной вероятности результата измерений:
![]() , (6.3)
, (6.3)
где ![]() — обратная функция интеграла вероятности
— обратная функция интеграла вероятности ![]() :
:
![]() . (6.4)
. (6.4)
Значение kОШ позволяет оценивать вероятность ошибки pОШ – количественную оценку помехоустойчивости. Область возможных значений оценки, в которой с заданной доверительной вероятностью будет находиться значение pОШ, определяется верхней (pВ) и нижней (pН) доверительными границами. При нормальном законе распределения числа ошибок значения pВ и pН определяются по формулам:
![]() , (6.5)
, (6.5)
![]() , (6.6)
, (6.6)
Очевидно, что точность оценок вероятности ошибки и коэффициента ошибки растет с увеличением N. Общее число символов цифрового сигнала, переданных за интервал измерения T, зависит от скорости передачи B: N = TB. Отсюда следует, что чем больше скорость передачи, тем быстрее и точнее можно оценить коэффициент ошибок.
6.2. Математическое выражение коэффициента битовых ошибок
Определим коэффициент битовых ошибок для реальных приёмников, которым свойственно наличие различных источников шумов. При этом будем считать, что приёмник принимает решение, какой бит (0 или 1) был передан в каждом битовом интервале путем стробирования фототока. Очевидно, что из-за наличия шумов данное решение может быть неверным, что приводит к появлению ошибочных битов. Поэтому, чтобы определить коэффициент битовых ошибок, необходимо понять, каким образом приемник принимает решение относительно переданного бита.
Обозначим через I1 и I0 фототоки, стробированные приемником в течение 1 и 0 битов, соответственно, а через s12 и s02 соответствующие шумы. Принимая, что последние имеют гауссовское распределение, проблема установления истинного значения принятого бита имеет следующую математическую формулировку. Фототок для битов 1 и 0 является выборкой гауссовской переменной со средним значением I1 и вариацией s1, а приёмник должен отслеживать этот сигнал и решать, является ли переданный бит 0 или 1. При этом существует много возможных правил принятия решения, которые могут быть реализованы в приёмнике с целью минимизации коэффициента битовых ошибок. Для значения фототока I этим оптимальным решением является наиболее вероятное значение переданного бита, которое определяется путём сравнения текущего значения фототока с пороговым значением Iп, используемым для принятия решения.
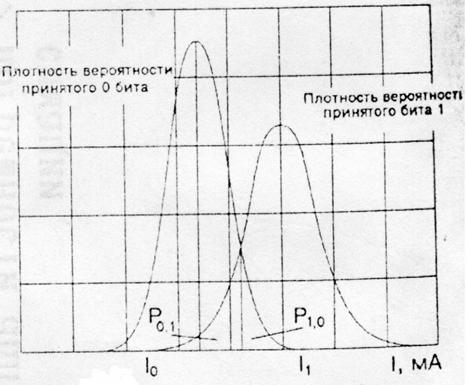
Рисунок 6.1. Функция плотности вероятности фототока принятых сигналов
Пусть при I ³ Iп принимается решение о том, что был передан бит 1, в противном случае – бит 0. Когда биты 1 и 0 равновероятны, что и рассматривается в дальнейшем, пороговый ток приблизительно равен:
![]() (6.7)
(6.7)
Геометрически Iп представляет собой значение тока I, для которого две кривые плотности вероятностей (рис. 6.1) пересекаются.
Вероятность того, что I < Iп, т. е. вероятность ошибки при передаче бита 1, обозначим через Р0,1, а вероятность решения для переданного бита 1, когда I ³ Iп при переданном 0, обозначим Р1,0.
Пусть Q(х) обозначает вероятность того, что нулевая средняя вариация гауссовской переменной превышает значение х, тогда:
 (6.8)
(6.8)
а
 (6.9)
(6.9)
а
 (6.10)
(6.10)
Можно показать [14], что BER определяется,
 (6.11)
(6.11)
Очень важно отметить, что в ряде случаев эффективным является использование изменяемого в зависимости от уровня сигнала порога принятия решения, как, например, шума оптического усилителя. Многие высокоскоростные приёмники обладают такой особенностью. Однако более простые приемники имеют порог, соответствующий среднему уровню принимаемого тока, а именно (I1 + I0)/2. Такая настройка порогового значения дает большой коэффициент битовых ошибок, определяемый выражением [14].
 (6.12)
(6.12)
Выражение (6.11) можно использовать для оценки BER, когда известны как мощность полученного сигнала, соответствующего битам 0 и 1, так и статистика шумов.
6.3. Нормы на параметры ошибок систем передачи
Битовые ошибки являются основным источником ухудшения качества связи, проявляющегося в искажении речи в телефонных каналах, недостоверности передачи информации или снижении пропускной способности передачи данных, и характеризуются статистическими параметрами и нормами на них, которые определены соответствующей вероятностью выполнения этих норм. Последние делятся на долговременные и оперативные нормы, первые из которых определяются рекомендациями ITU-T G.821 и G.826, а вторые – М.2100, М.2110 и М.2120, при этом, согласно М.2100, качество цифрового тракта по критерию ошибок делят на три категории:
- нормальное – BER < 10-6;
- пониженное – 10-6 ≤ BER < 10-3 (предаварийное состояние);
- неприемлемое – BER ≥ 10-3 (аварийное состояние).
Так как появление ошибок является следствием совокупности всех текущих условий передачи цифровых сигналов, имеющих случайный характер, то при отсутствии данных о законе распределения ошибок его отдельные элементы могут быть определены с определенной степенью достоверности только по результатам продолжительных измерений. В то же время на практике необходимо, чтобы значения параметров ошибок для ввода в эксплуатацию и технического обслуживания систем передачи основывались на достаточно коротких интервалах времени измерения. Исходя из этого, были определены следующие параметры ошибок [14]:
- секунда с ошибками (error second, ES) – односекундный интервал, содержащий хотя бы один ошибочный бит;
- секунда, пораженная ошибками (severely error second, SES) – односекундный интервал с BER ≥ 10-3.
Данные параметры ошибок должны оцениваться в течение времени готовности (available time), отсчет которого начинается с первой секунды из десяти следующих друг за другом секунд, в каждой из которых BER<10-3. ITU-T M.2100 регламентирует нормы качества (performance objectives, PO) на выраженные максимальным процентом времени параметры ошибок, которые зависят только от скорости передачи и приводятся для условного эталонного соединения (hypothetical reference connection, HRC/HRX/) длиной 27500 км. При этом нормы качества распределяются по участкам соединения соответствующей категории качества. В качестве эталонной модели такого распределения принимается участок высокой категории качества протяженностью 25000 км, которому присваивается 40% от общей нормы качества на параметры ошибок передачи точка-точка, что в пересчете на 1 км, дает 0.0016 %/км.. Остальные 4 участка (2 среднего качества и 2 с приемлемым качеством) длиной 2 х 1250 км расположены по обе стороны от центрального. Поэтому распределение, пропорциональное протяженности L км тракта высокой категории качества, будет определяться, как
AL = 0.0016 · L %/км. (6.13)
Нормы качества на цифровые тракты и каналы подразделяются на настроечные и эксплуатационные, причем вводимые в эксплуатацию впервые или после проведения корректирующих действий они должны сдаваться по настроечным нормам качества, а в процессе эксплуатации должны соответствовать эксплуатационным нормам. Обычно [105] эксплуатационная норма представляется в виде эталонной нормы качества (reference performance objective, RPO)
RPO = A · T · PO, (6.14)
а настроечная, включающая запас на старение, используемая при вводе в эксплуатацию (bringing into service objective, BISO), определяется, как половина RPO, т.е.
BISO = RPO/2. (6.15)
Здесь PO – норма качества оцениваемого параметра, а T = 86400 с (одни сутки) – продолжительность измерений (количество односекундных интервалов).
Для анализа результатов, полученных в процессе измерений, используются также предельные значения S1и S2 норм (рисунок 6.2), которые соответствуют числу событий (ES,SES) и определяются, как:
S1 = RPO/2 – D и S2 = RPO/2 + D, (6.16)
где D = 2![]() — дисперсия оцениваемого параметра.
— дисперсия оцениваемого параметра.
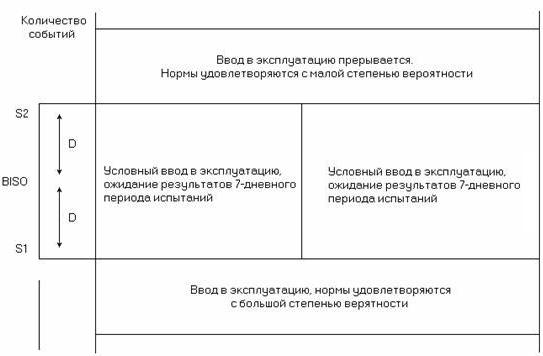
Рисунок 6.2. Предельные значения и условия ввода в эксплуатацию системы передачи
При соответствии результатов измерений норме S1 цифровой тракт может быть введен в эксплуатацию без всякого сомнения, а при превышении нормы S2 в обязательном порядке требуется повышение качества испытываемого цифрового тракта, т.е. должны быть проведены корректирующие действия с повторными измерениями. Если значение ES или SES лежит в интервале от S1 до S2, цифровой тракт может быть введен в эксплуатацию условно или временно с продолжением измерений в течение 7 суток. Данный подход к оценке качества цифровых систем передачи по параметрам ошибок позволяет сократить время измерений и получить норму цифрового тракта суммированием норм цифровых участков. При этом значения RPO, D, S1 и S2 выражаются в виде числа событий за установленный интервал времени, а не в виде процентов времени.
Для измерения коэффициента ошибок разработан ряд специальных BER анализаторов – измерителей коэффициента ошибок, включающих генераторы псевдослучайных и детерминированных последовательностей передаваемых кодированных символов, а также приемное оборудование, осуществляющее собственно измерение коэффициента ошибок. В случае посимвольного сравнения кодов измерение может быть выполнено с использованием шлейфа, т.е. путем измерения ошибок с одной оконечной станции при установке на противоположном конце шлейфа. Другой метод основан на выделении ошибок благодаря избыточности используемых кодов и используется для измерений от передающей до приемной сторон тракта или участка линии, т.е. когда выделение и фиксация ошибок производятся на ее приемном конце. Очевидно, что в первом случае требуется использование одного комплекта, а во втором – двух комплектов приборов. При этом измеренное значение коэффициента ошибок отражает качество передачи при прохождении сигнала в обоих направлениях и в каждом направлении соответственно.
6.4. Принципы построения измерителей ошибок
В зависимости от скорости передачи контролируемой системы передачи в анализаторе используются различные схемотехнические решения.
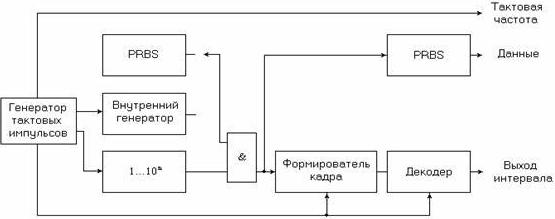
Рисунок 6.3. Генератор низкоскоростного BER анализатора
Низкоскоростной генератор тестовых кодов и детектор ошибок. Используемый в телекоммуникациях анализатор BER, состоящий [106] из генератора тестовых кодов и собственно анализатора ошибок, представлен на рисунках 6.3 и 6.4. Он предназначен для невысоких (до 200 Мбит/с) битовых скоростей, учитывая, что максимальные типовые скорости составляют 44.736 Мбит/с (DS3) в Северной Америке и 139.364 Мбит/с – за пределами Северной Америки.
PRBS с генератором кодовых групп, представленный на рис. 6.16, синхронизируется либо от источника тактового сигнала с фиксированной частотой (согласно G.703), либо от синтезатора, осуществляя тем самым изменение частоты синхронизации. В связи с этим использование данных средств требует задания некоторых определенных частот синхронизации и наличия возможности обеспечения их небольших смещений от ±15 до ±50 ppm. Для повторения тестовых кодов схема PRBS и генератор кодовых групп обычно имеют триггерную схему, управляющую либо выходным усилителем бинарных данных, который обеспечивает данные и данные с сопровождающим синхросигналом, либо выходную схему кодированных данных. Это позволяет создавать цикловую синхронизацию сигнала в соответствии с требованием, например, системы SONET/SDH. Кроме этого, данная схема способствует созданию соответствующего интерфейсного кода для эффективного восстановления тактовой синхронизации. Выходной усилитель обеспечивает необходимый уровень сигнала в соответствии со спецификацией электрического интерфейса, в том числе сигнала с чередованием полярности импульсов.
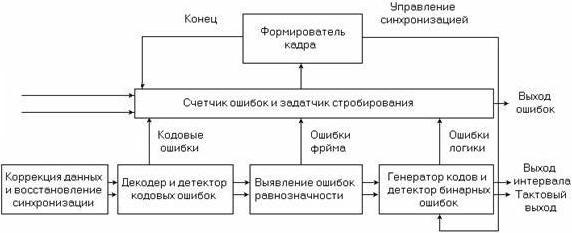
Рисунок 6.4. Низкоскоростной детектор ошибок
Детектор ошибок, показанный на рисунке 6.4, получает стандартный кодированный сигнал, восстанавливает генератор синхросигнала и устраняет кодирование для обеспечения бинарной даты и синхросигналов. Он обнаруживает любые нарушения алгоритма интерфейсного кода и посылает сигналы на счетчик ошибок, что составляет первый уровень процесса обнаружения ошибок. При работе с цикловыми сигналами приемник захватывает любой присутствующий элемент цикловой синхронизации, проверяет наличие цикловых ошибок и декодирует любые встроенные сигналы тревоги, или CRC биты, тем самым обеспечивая возможность измерения.
Наконец, бинарные данные и синхросигнал направляются на детектор ошибок и генератор эталонных тестовых кодов, которые проверяют полученный тестовый код бит за битом на предмет обнаружения логических ошибок. Временная база контролирует пропускание измерения для непрерывного, периодического и ручного режима. Накопленное количество ошибок обрабатывается для получения значения BER и анализа функционирования при наличии ошибок.
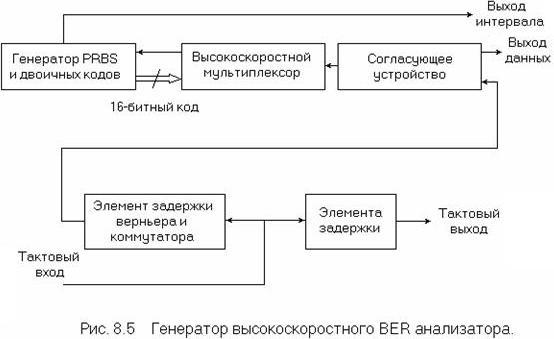
Высокоскоростной генератор тестовых кодов и детектор ошибок. На рисунках 6.5 и 6.6 показаны схемы [14] для 3 Гбит/с генератора тестовых кодов и детектора ошибок. Вследствие высокой битовой скорости генерация последовательных PRBS и кодовых групп на этой скорости не представляется целесообразной. Поэтому тестовые коды генерируются (рисунок 6.5) как параллельные 16-битные кодовые группы при максимальной скорости 200 Мбит/с, используя затем выполненные по биполярной технологии регистраторы смещения и высокоемкостную память. Высокоскоростные схемы обычно выполняются на основе арсенид-галлиевых логических схем, преобразующих параллельные данные в последовательный поток на скорости до 3 Гбит/с.
Согласно данной схеме, вход синхросигнала генерируется синтезатором частоты, согласующее устройство управляется через линию фиксированной задержки, а генератор тестовых кодов и выходной усилитель синхронизируются через схему дискретной и плавно изменяемой задержки, так что фаза синхросигнала/данных может изменяться как в положительном направлении, так и в отрицательном. Дискретные значения задержки составляют 250, 500 и 1000 пс, тогда как диапазон плавной задержки лежит в пределах от 0 до 250 пс с 1 пс инкрементом.
Корректор временной диаграммы, связанный с выходным усилителем, пересинхронизирует данные через триггер D типа для поддержания минимального фазового дрожания. Так как подобный тип тестового устройства обычно используется при проведении лабораторных измерений, выходные уровни синхросигнала и данных и постоянные смещения могут варьироваться для того или иного конкретного случая использования.
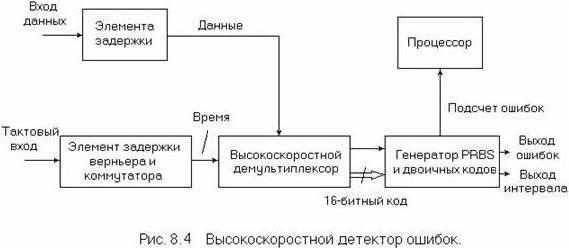
Детектор ошибок, показанный на рис. 6.6, имеет простое параллельное соединение, в связи с чем входы синхросигнала и данных проходят через схемы дискретной и плавной задержки, обеспечивая оптимальную настройку при обнаружении ошибок для любой фазы синхросигнала/данных. Действительно, путем настройки под контролем внутреннего процессора решающего порога и фазы синхросигнала условия функционирования детектора ошибок могут быть оптимизированы автоматически. Высокоскоростной демультиплексор преобразует последовательный поток данных в 16-битные параллельные кодовые группы наряду с поделенным на 16 синхросигналом. Параллельно соединенный генератор эталонных тестовых кодов синхронизируется с входными данными и осуществляет сравнение битов, поэтому любая ошибка фиксируется одним из двух счетчиков, первый из которых подсчитывает число ошибок, а второй – общее число битов. Процессор измерения обеспечивает анализ функционирования при наличии ошибок с разрешением до 1 мс.
6.5. Техника измерения коэффициента ошибок
Рассмотрим измерение коэффициента ошибок путем посимвольного сравнения и подсчета ошибочно принятых элементарных импульсов. Для этого вначале (перед измерением) на передающей станции с помощью оптического аттенюатора устанавливают заданный в технических условиях на аппаратуру линейного тракта уровень оптического излучения. Затем на передающем конце подключают генератор испытательных сигналов, а на приемном – измеритель коэффициента ошибок и, изменяя значения уровней средней мощности, измеряют коэффициент ошибок. Время измерения определяют в зависимости от скорости передачи, объема информации и значений коэффициента ошибок Кошi (BERi).
Коэффициент ошибок при заданном уровне оптического излучения вычисляют по формуле [14]
![]() (6.17)
(6.17)
где
![]() ,
,  , (6.18)
, (6.18)
где ![]() и
и ![]() — погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
— погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
Коэффициенты ошибок
Появление ошибки
в двоичной последовательности зависит
от многих факторов и оценивается как
случайное явление. Вероятность появления
ошибки находится как предел отношения
количества ошибок в переданной двоичной
последовательности к общему числу
элементов этой последовательности при
условии, что общее число элементов
последовательности стремится к
бесконечности, т.е.
![]()
.
В реальных условиях
выполнить требование
![]()
невозможно. Поэтому при анализе используют
понятие частость ошибок или коэффициент
ошибок
![]()
,
который определяется как отношение
числа ошибочных элементов (комбинаций,
сообщений) в принятой последовательности
к общему числу принятых элементов
(комбинаций, сообщений) этой
последовательности:
![]()
При достаточно
большом
![]()
величины
![]()
и
![]()
мало отличаются друг от друга.
В связи с выше
сказанным различают
следующие коэффициенты ошибок:
1.
Коэффициент ошибок по элементам
![]()
где
![]()
число
ошибочных элементов в переданном
сообщении,
![]()
общее число
элементов в переданном сообщении.
В рассмотренном
выше примере
![]()
2. Коэффициент
ошибок по комбинациям:
![]()
где
![]()
число комбинаций принятых с ошибками
в переданном сообщении,
![]()
общее
число комбинаций в переданном сообщении.
В рассмотренном
выше примере
![]()
3. Коэффициент
ошибок по сообщениям:
![]()
где
![]()
число
сообщений принятых с ошибками,
![]()
общее
число принятых сообщений.
В рассмотренном
выше примере![]()
Расчет вероятности ошибок
Вероятность
появления ошибок можно вычислить,
предположив, что ошибки появляются
независимо друг от друга, т.е. представить
появление ошибок как независимые
случайные события (такие ошибки называют
простейшими).
Будем считать, что
вероятность появления ошибки P
численно
равна вероятности появления искажения,
превышающего допустимое значение
![]()
.
Вероятность
превышения случайной величиной некоторого
значения без учета знака может быть
определена по формуле:

В
выражении учтено, что, согласно
исследованиям, проведенным с помощью
анализатора искажений, закон распределения
смещений границ принимаемых импульсов
близок к нормальному.
Интеграл в этой
формуле не выражается через элементарные
функции, но его можно вычислить через
функцию Лапласа, воспользовавшись
соответствующими таблицами:
В этом
случае вероятность ошибки при симметричной
кривой распределения искажений (а
= 0)
равна:
![]()
,
где
![]()
Такой упрощенный
метод расчета отличается простотой
получения исходных данных и может быть
рекомендован для ориентировочного
анализа.
Математические модели ошибок
Для анализа
механизма возникновения ошибок при
аналитических исследованиях применяют
математические модели ошибок, т.е.
математическое описание процесса их
появления.
Простейшей модель
основана на предположении статистической
независимости ошибок. При этом свойства
канала как источника ошибок описываются
лишь единственным параметром –
вероятностью p
ошибочного приема одного элемента.
Задача формулируется
следующим образом: происходит испытание,
состоящее в том, что по каналу связи
передается кодовый элемент. Вероятность
того, что этот кодовый элемент будет
принят неверно (т.е. произойдет ошибка
при передаче — событие A),
равна p,
тогда вероятность того, что ошибка не
произойдет (т.е. событие А
не наступит) равна q=1-p.
Происходит n
независимых испытаний, т.е. передается
n
кодовых элементов. Вероятность наступления
события А
в каждом испытании постоянна и равна
p.
Требуется определить вероятность
наступления события А
ровно k
раз, если опыт повторялся n
раз. Такая постановка задачи полностью
соответствует схеме Бернулли, тогда
имеем:
![]()
где
![]()
число
ошибочно принятых элементов в кодовой
комбинации,
![]()
число сочетаний
из n
по
![]()
.
Тогда вероятность
приема неискаженной комбинации
![]()
равно
![]()
Чтобы упростить
дальнейшие выкладки, разложим данное
выражение в ряд Маклорена, воспользовавшись
известной формулой:
![]()
Беря два члена
данного разложения и используя введенные
обозначения, получим:
![]()
(Заметим, что данным
разложением можно воспользоваться,
т.к. вероятность p
всегда меньше единицы).
Тогда вероятность
приема ошибочной комбинации, т.е.
комбинации, содержащей хотя бы одну
ошибку, равна:
![]()
Результат получен
с достаточной для практики точностью,
т.к. вероятность неправильного приема
одного элемента p![]()
.
Простейшая модель
ошибок носит приближенный характер,
дает грубое описание реальных каналов
и может быть использована только для
ориентировочных расчетов.
Все остальные
известные модели ошибок основаны на
допущении, что ошибки не являются
независимыми, а группируются в пакеты.
Модель Э.Н.Гильберга
основана на предложении, что при пакетном
группировании поток ошибок может быть
описан простым Марковским процессом.
Согласно Э.Н.Гильберту, канал может
находиться в одном из двух состояний:
«хорошем» (ошибки не возможны) и «плохом»,
при этом ошибки полностью определяются
матрицей переходных вероятностей:
![]()
где
p00
–
вероятность передачи по каналу «0» без
ошибки,
p11
–
вероятность передачи по каналу «1» без
ошибки,
p01
–
вероятность ошибки 0→1 при передачи по
каналу,
p10
– вероятность
ошибки 1→0 при передачи по каналу.
и вероятностью
p0.
Вероятности изменения состояний канала
p01
и p10
должны быть значительно меньше
вероятностей сохранения состояния
канала p00
и p11.
Эта модель хорошо описывает характер
распределения ошибок в каналах с длинными
и плотными пакетами ошибок.
Имеется ряд моделей,
дающих частичное описание канала.
Например, по одной из них можно определить
зависимость вероятности появления
ошибочной комбинации (Рок)
от ее длины n
и вероятности появления
![]()
—
кратной ошибки в комбинации:
![]()
,
где
— коэффициент группирования ошибок.
Если
![]()
,
то пакетирование ошибок отсутствует,
они считаются независимыми, и выражение
преобразуется в формулу, полученную по
схеме Бернулли.
Известна модель
Б.Бенета и Ф.Фройлиха основанная на
предположении, что ошибки группируются
в пакеты и что ошибки в пакете, как и
сами пакеты, возникают независимо друг
от друга. Для описания канала с ошибками
следует знать три параметра: вероятность
появления пакета ошибок любой длины
![]()
,
вероятность ошибки в пакете
![]()
и распределение вероятностей длин
пакетов ошибок
![]()
![]()
.
Основным недостатком рассматриваемой
модели является предположением о
независимости появления пакетов ошибок.
Ни одна модель не
дает абсолютно точного описания реального
процесса возникновения ошибок вследствие
его сложности.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
From Wikipedia, the free encyclopedia
In digital transmission, the number of bit errors is the numbers of received bits of a data stream over a communication channel that have been altered due to noise, interference, distortion or bit synchronization errors.
The bit error rate (BER) is the number of bit errors per unit time. The bit error ratio (also BER) is the number of bit errors divided by the total number of transferred bits during a studied time interval. Bit error ratio is a unitless performance measure, often expressed as a percentage.[1]
The bit error probability pe is the expected value of the bit error ratio. The bit error ratio can be considered as an approximate estimate of the bit error probability. This estimate is accurate for a long time interval and a high number of bit errors.
Example[edit]
As an example, assume this transmitted bit sequence:
1 1 0 0 0 1 0 1 1
and the following received bit sequence:
0 1 0 1 0 1 0 0 1,
The number of bit errors (the underlined bits) is, in this case, 3. The BER is 3 incorrect bits divided by 9 transferred bits, resulting in a BER of 0.333 or 33.3%.
Packet error ratio[edit]
The packet error ratio (PER) is the number of incorrectly received data packets divided by the total number of received packets. A packet is declared incorrect if at least one bit is erroneous. The expectation value of the PER is denoted packet error probability pp, which for a data packet length of N bits can be expressed as
 ,
,

assuming that the bit errors are independent of each other. For small bit error probabilities and large data packets, this is approximately

Similar measurements can be carried out for the transmission of frames, blocks, or symbols.
The above expression can be rearranged to express the corresponding BER (pe) as a function of the PER (pp) and the data packet length N in bits:
![{\displaystyle p_{e}=1-{\sqrt[{N}]{(1-p_{p})}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f5d380e45b0451c45265e199221fae5bd5b84bf9)
Factors affecting the BER[edit]
In a communication system, the receiver side BER may be affected by transmission channel noise, interference, distortion, bit synchronization problems, attenuation, wireless multipath fading, etc.
The BER may be improved by choosing a strong signal strength (unless this causes cross-talk and more bit errors), by choosing a slow and robust modulation scheme or line coding scheme, and by applying channel coding schemes such as redundant forward error correction codes.
The transmission BER is the number of detected bits that are incorrect before error correction, divided by the total number of transferred bits (including redundant error codes). The information BER, approximately equal to the decoding error probability, is the number of decoded bits that remain incorrect after the error correction, divided by the total number of decoded bits (the useful information). Normally the transmission BER is larger than the information BER. The information BER is affected by the strength of the forward error correction code.
Analysis of the BER[edit]
The BER may be evaluated using stochastic (Monte Carlo) computer simulations. If a simple transmission channel model and data source model is assumed, the BER may also be calculated analytically. An example of such a data source model is the Bernoulli source.
Examples of simple channel models used in information theory are:
- Binary symmetric channel (used in analysis of decoding error probability in case of non-bursty bit errors on the transmission channel)
- Additive white Gaussian noise (AWGN) channel without fading.
A worst-case scenario is a completely random channel, where noise totally dominates over the useful signal. This results in a transmission BER of 50% (provided that a Bernoulli binary data source and a binary symmetrical channel are assumed, see below).
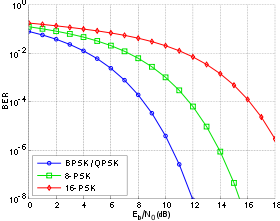

In a noisy channel, the BER is often expressed as a function of the normalized carrier-to-noise ratio measure denoted Eb/N0, (energy per bit to noise power spectral density ratio), or Es/N0 (energy per modulation symbol to noise spectral density).
For example, in the case of QPSK modulation and AWGN channel, the BER as function of the Eb/N0 is given by:
 .[2]
.[2]
People usually plot the BER curves to describe the performance of a digital communication system. In optical communication, BER(dB) vs. Received Power(dBm) is usually used; while in wireless communication, BER(dB) vs. SNR(dB) is used.
Measuring the bit error ratio helps people choose the appropriate forward error correction codes. Since most such codes correct only bit-flips, but not bit-insertions or bit-deletions, the Hamming distance metric is the appropriate way to measure the number of bit errors. Many FEC coders also continuously measure the current BER.
A more general way of measuring the number of bit errors is the Levenshtein distance.
The Levenshtein distance measurement is more appropriate for measuring raw channel performance before frame synchronization, and when using error correction codes designed to correct bit-insertions and bit-deletions, such as Marker Codes and Watermark Codes.[3]
Mathematical draft[edit]
The BER is the likelihood of a bit misinterpretation due to electrical noise  . Considering a bipolar NRZ transmission, we have
. Considering a bipolar NRZ transmission, we have
 for a «1» and
for a «1» and  for a «0». Each of
for a «0». Each of  and
and  has a period of
has a period of  .
.
Knowing that the noise has a bilateral spectral density  ,
,
is 
and is  .
.
Returning to BER, we have the likelihood of a bit misinterpretation  .
.
 and
and 
where  is the threshold of decision, set to 0 when
is the threshold of decision, set to 0 when  .
.
We can use the average energy of the signal  to find the final expression :
to find the final expression :

±§
Bit error rate test[edit]
BERT or bit error rate test is a testing method for digital communication circuits that uses predetermined stress patterns consisting of a sequence of logical ones and zeros generated by a test pattern generator.
A BERT typically consists of a test pattern generator and a receiver that can be set to the same pattern. They can be used in pairs, with one at either end of a transmission link, or singularly at one end with a loopback at the remote end. BERTs are typically stand-alone specialised instruments, but can be personal computer–based. In use, the number of errors, if any, are counted and presented as a ratio such as 1 in 1,000,000, or 1 in 1e06.
Common types of BERT stress patterns[edit]
- PRBS (pseudorandom binary sequence) – A pseudorandom binary sequencer of N Bits. These pattern sequences are used to measure jitter and eye mask of TX-Data in electrical and optical data links.
- QRSS (quasi random signal source) – A pseudorandom binary sequencer which generates every combination of a 20-bit word, repeats every 1,048,575 words, and suppresses consecutive zeros to no more than 14. It contains high-density sequences, low-density sequences, and sequences that change from low to high and vice versa. This pattern is also the standard pattern used to measure jitter.
- 3 in 24 – Pattern contains the longest string of consecutive zeros (15) with the lowest ones density (12.5%). This pattern simultaneously stresses minimum ones density and the maximum number of consecutive zeros. The D4 frame format of 3 in 24 may cause a D4 yellow alarm for frame circuits depending on the alignment of one bits to a frame.
- 1:7 – Also referred to as 1 in 8. It has only a single one in an eight-bit repeating sequence. This pattern stresses the minimum ones density of 12.5% and should be used when testing facilities set for B8ZS coding as the 3 in 24 pattern increases to 29.5% when converted to B8ZS.
- Min/max – Pattern rapid sequence changes from low density to high density. Most useful when stressing the repeater’s ALBO feature.
- All ones (or mark) – A pattern composed of ones only. This pattern causes the repeater to consume the maximum amount of power. If DC to the repeater is regulated properly, the repeater will have no trouble transmitting the long ones sequence. This pattern should be used when measuring span power regulation. An unframed all ones pattern is used to indicate an AIS (also known as a blue alarm).
- All zeros – A pattern composed of zeros only. It is effective in finding equipment misoptioned for AMI, such as fiber/radio multiplex low-speed inputs.
- Alternating 0s and 1s — A pattern composed of alternating ones and zeroes.
- 2 in 8 – Pattern contains a maximum of four consecutive zeros. It will not invoke a B8ZS sequence because eight consecutive zeros are required to cause a B8ZS substitution. The pattern is effective in finding equipment misoptioned for B8ZS.
- Bridgetap — Bridge taps within a span can be detected by employing a number of test patterns with a variety of ones and zeros densities. This test generates 21 test patterns and runs for 15 minutes. If a signal error occurs, the span may have one or more bridge taps. This pattern is only effective for T1 spans that transmit the signal raw. Modulation used in HDSL spans negates the bridgetap patterns’ ability to uncover bridge taps.
- Multipat — This test generates five commonly used test patterns to allow DS1 span testing without having to select each test pattern individually. Patterns are: all ones, 1:7, 2 in 8, 3 in 24, and QRSS.
- T1-DALY and 55 OCTET — Each of these patterns contain fifty-five (55), eight bit octets of data in a sequence that changes rapidly between low and high density. These patterns are used primarily to stress the ALBO and equalizer circuitry but they will also stress timing recovery. 55 OCTET has fifteen (15) consecutive zeroes and can only be used unframed without violating one’s density requirements. For framed signals, the T1-DALY pattern should be used. Both patterns will force a B8ZS code in circuits optioned for B8ZS.
Bit error rate tester[edit]
A bit error rate tester (BERT), also known as a «bit error ratio tester»[4] or bit error rate test solution (BERTs) is electronic test equipment used to test the quality of signal transmission of single components or complete systems.
The main building blocks of a BERT are:
- Pattern generator, which transmits a defined test pattern to the DUT or test system
- Error detector connected to the DUT or test system, to count the errors generated by the DUT or test system
- Clock signal generator to synchronize the pattern generator and the error detector
- Digital communication analyser is optional to display the transmitted or received signal
- Electrical-optical converter and optical-electrical converter for testing optical communication signals
See also[edit]
- Burst error
- Error correction code
- Errored second
- Pseudo bit error ratio
- Viterbi Error Rate
References[edit]
- ^ Jit Lim (14 December 2010). «Is BER the bit error ratio or the bit error rate?». EDN. Retrieved 2015-02-16.
- ^
Digital Communications, John Proakis, Massoud Salehi, McGraw-Hill Education, Nov 6, 2007 - ^
«Keyboards and Covert Channels»
by Gaurav Shah, Andres Molina, and Matt Blaze (2006?) - ^ «Bit Error Rate Testing: BER Test BERT » Electronics Notes». www.electronics-notes.com. Retrieved 2020-04-11.
![]() This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
This article incorporates public domain material from Federal Standard 1037C. General Services Administration. (in support of MIL-STD-188).
External links[edit]
- QPSK BER for AWGN channel – online experiment
Коды с обнаружением
ошибок
1.
Код с проверкой на четность.
Такой
код образуется путем добавления к
передаваемой комбинации, состоящей из k
информационных символов, одного
контрольного символа (0 или 1), так, чтобы
общее число единиц в передаваемой
комбинации было четным.
Пример
5.1.
Построим коды для проверки на четность, где k
—
исходные комбинации, r
—
контрольные символы.
| k |
r
|
n
|
| 11011 |
0 |
110110 |
| 11100 |
1 |
111001
|
Определим, каковы обнаруживающие свойства
этого кода. Вероятность Poo
обнаружения ошибок будет равна
![]()
Так как вероятность ошибок
![]()
является
весьма малой величиной, то можно
ограничится
![]()
Вероятность
появления всевозможных ошибок, как
обнаруживаемых так и не обнаруживаемых,
равна
![]()
,
где
![]()
—
вероятность отсутствия искажений в кодовой
комбинации. Тогда
![]()
.
При
передаче большого количества кодовых
комбинаций Nk
, число кодовых
комбинаций, в которых ошибки
обнаруживаются, равно:
![]()
Общее
количество комбинаций с обнаруживаемыми и
не обнаруживаемыми ошибками равно
![]()
Тогда
коэффициент обнаружения Kобн
для кода с четной защитой будет равен
![]()
Например,
для кода с k=5
и вероятностью ошибки
![]()
коэффициент
обнаружения составит
![]()
. То есть 90% ошибок
обнаруживаем, при этом избыточность будет
составлять
![]()
или
17%.
2.
Код с
постоянным весом.
Этот
код содержит постоянное число единиц и
нулей. Число кодовых комбинаций составит
![]()
Пример 5.2. Коды с двумя единицами из пяти и
тремя единицами из семи.
| 11000 10010 00101 |
0000111 1001001 1010100 |
Этот код позволяет обнаруживать любые
одиночные ошибки и часть многократных
ошибок. Не обнаруживаются этим кодом только
ошибки смещения, когда одновременно одна
единица переходит в ноль и один ноль
переходит в единицу, два ноля и две единицы
меняются на обратные символы и т.д.
Рассмотрим
код с тремя единицами из семи. Для этого
кода возможны смещения трех типов.

Вероятность появления
не обнаруживаемых ошибок смещения
![]()
, где
![]()
![]()
![]()
При
p<<1
![]()
, тогда
![]()
Вероятность
появления всевозможных ошибок как
обнаруживаемых, так и не обнаруживаемых
будет составлять
![]()
Вероятность
обнаруживаемых ошибок
![]()
. Тогда
коэффициент обнаружения будет равен
![]()
Например,
код
![]()
при
![]()
коэффициент обнаружения составит
![]()
,
избыточность L=27%.
3.
Корреляционный код
(Код с удвоением). Элементы
данного кода заменяются двумя символами,
единица ‘1’ преобразуется в 10, а ноль ‘0’ в
01.
Вместо комбинации 1010011
передается 10011001011010.
Ошибка обнаруживается в том случае, если в
парных элементах будут одинаковые символы
00 или 11 (вместо 01 и 10).
Например,
при k=5,
n=10
и вероятности ошибки
![]()
,
![]()
.
Но при этом избыточность будет
составлять 50%.
4.
Инверсный код. К
исходной комбинации добавляется такая же
комбинация по длине. В линию посылается
удвоенное число символов. Если в исходной
комбинации четное число единиц, то
добавляемая комбинация повторяет исходную
комбинацию, если нечетное, то добавляемая
комбинация является инверсной по отношению
к исходной.
| k |
r
|
n
|
| 11011 |
11011 |
1101111011 |
| 11100 |
00011 |
1110000011 |
Прием
инверсного кода осуществляется в два этапа.
На первом этапе суммируются единицы в
первой основной группе символов. Если число
единиц четное, то контрольные символы
принимаются без изменения, если нечетное,
то контрольные символы инвертируются. На
втором этапе контрольные символы
суммируются с информационными символами по
модулю два. Нулевая сумма говорит об
отсутствии ошибок. При ненулевой сумме,
принятая комбинация бракуется. Покажем
суммирование для принятых комбинаций без
ошибок (1,3) и с ошибками (2,4).
Обнаруживающие способности
данного кода достаточно велики. Данный код
обнаруживает практически любые ошибки,
кроме редких ошибок смещения, которые
одновременно происходят как среди
информационных символов, так и среди
соответствующих контрольных. Например, при k=5, n=10
и
![]()
. Коэффициент обнаружения будет
составлять
![]()
.
5.
Код Грея.
Код Грея используется для
преобразования угла поворота тела вращения
в код. Принцип
работы можно представить по рис.5.2. На
пластине, которая вращается на
валу, сделаны отверстия, через
которые может
проходить свет.
Причём, диск разбит
на сектора, в
которых и
сделаны эти
отверстия. При вращении, свет
проходит через
них, что приводит
к срабатыванию фотоприёмников. При
снятии информации в виде двоичных кодов
может произойти существенная ошибка.
Например, возьмем две соседние цифры 7 и 8.
Двоичные коды этих цифр отличаются во всех
разрядах.
7 0111
—> 1111
8 1000
—>
0000
Если ошибка произойдет в старшем разряде,
то это приведет к максимальной ошибке, на 3600.
А код Грея,
это такой код в котором все соседние
комбинации отличаются только одним
символом, поэтому при переходе от
изображения одного числа к изображению
соседнего происходит изменение только на
единицу младшего разряда. Ошибка будет
минимальной.
Рис.5.2. Схема съема
информации угла поворота вала в код
Код Грея
записывается следующим образом
| Номер |
Код Грея |
| 0 |
0 0 0 0 |
| 1 |
0 0 0 1 |
| 2 |
0 0 1 1 |
| 3 |
0 0 1 0 |
| 4 |
0 1 1 0 |
| 5 | 0 1 1 1 |
| 6 |
0 1 0 1 |
| 7 |
0 1 0 0 |
| 8 |
1 1 0 0 |
| 9 |
1 1 0 1 |
| 10 |
1 1 1 1 |
| 11 |
1 1 1 0 |
| 12 |
1 0 1 0 |
| 13 |
1 0 1 1 |
| 14 |
1 0 0 1 |
| 15 |
1 0 0 0 |
Разряды
в коде Грея не имеют постоянного веса. Вес k—разряда
определяется следующим образом
![]()
.
При этом все нечетные
единицы, считая слева направо, имеют
положительный вес, а все четные единицы
отрицательный.
Например,
![]()
Непостоянство
весов разрядов затрудняет выполнение
арифметических операций в коде Грея,
поэтому необходимо уметь делать перевод
кода Грея в обычный двоичный код и наоборот.
Алгоритм перевода чисел можно представить
следующим образом.
Пусть
![]()
— двоичный код,
![]()
— код Грея
Тогда
переход из двоичного кода
в код Грея выполнится
по следующему алгоритму
Например,
![]() .
.
Обратный переход из кода Грея в
двоичный код

![]()
Например,
![]() .
.
![]()
Обязательными элементами современных сетей связи являются системы сетевого управления, с помощью которых решаются такие задачи, как реконфигурация сети, непрерывный мониторинг параметров системы связи (например, SIP GSM шлюзов), фиксация аварийных состояний, защитные переключения, хранение и обработка результатов мониторинга и т. д. Все указанные операции выполняются, как правило, автоматически, с помощью встроенных аппаратных и программных средств.
В то же время зачастую при обслуживании сетей связи не удается обойтись без ручных операций с применением портативных измерительных приборов. Классический пример – устранение сложных повреждений металлических кабелей связи, случившихся по причине намокания.
АНАЛИЗ ОШИБОК В ЦИФРОВЫХ СИСТЕМАХ ПЕРЕДАЧИ
Основное преимущество цифровой передачи по сравнению с аналоговой заключается в отсутствии накопления помех вдоль линии. Это достигается за счет восстановления формы передаваемого сигнала на каждом регенерационном участке.
Все факторы, от которых зависит длина участка, можно разделить на внутренние и внешние.
Наиболее важными внутренними считают затухание линии, межсимвольные помехи, нестабильность тактовой частоты системы, вариацию задержки, возрастание уровня шумов вследствие старения системы.
К существенным внешним факторам обычно относят переходные и импульсные помехи, внешние электромагнитные влияния, механические повреждения контактов при вибрации или ударах, ухудшение свойств передающей среды вследствие перепадов температуры.
Все они обычно предопределяют ухудшение самого чувствительного к ошибкам параметра цифровой передачи — соотношения сигнал/шум. Действительно, снижение величины данного соотношения всего на 1 дБ приводит к увеличению обобщенного параметра качества цифровых систем передачи, которым является коэффициент битовых ошибок (Bit Error Rate, BER), по крайней мере на порядок.
Согласно определению, BER представляет собой отношение числа ошибочно принятых битов к общему числу принятых битов. Его величина статистически колеблется около значения среднего коэффициента ошибок за длительный промежуток времени. Разница между непосредственно измеренным коэффициентом ошибок и долговременным средним значением зависит от числа контролируемых бит и тем самым от длительности измерения.
База времени формируется при помощи двух основных методов.
В соответствии с первым из них, на принимающем конце задается фиксированное число наблюдаемых бит и регистрируется соответствующее число бит с ошибками.
Например, если число ошибочно принятых бит оказалось равным 20, а заданное общее число принимаемых бит – 106, то коэффициент ошибок составит 20/106 = 20 x 10-6 = 2 x 10-5 .
Достоинством такого подхода является точно известное время измерения, а недостатком – невысокая надежность измерения при малом числе ошибок.
Согласно второму методу, время измерений определяется заданным числом ошибок. Измерение длится до тех пор, пока, например, не будет зафиксировано 100 ошибок. Затем на основании соответствующего числа битов данных вычисляется коэффициент ошибок.
Его недостаток заключается в том, что неизвестно время измерений, которое при малых коэффициентах ошибок может оказаться очень большим. Кроме того, вполне возможно, что счетчик бит данных заполнится полностью, и измерения прекратятся. Поэтому такой способ используется редко.
На начальном этапе развития цифровых систем передачи они применялись главным образом для передачи аналогового телефонного сигнала, и потому требования к качеству цифровых систем передачи определялись характеристиками этого сигнала.
Ошибка в цифровом сигнале приводит к быстрому изменению величины сигнала АИМ на входе канального демодулятора, и абонент слышит неприятный щелчок на выходе канала ИКМ. Экспериментально установлено, что заметные щелчки возникают только при ошибках в одном из первых двух наибольших по весу символов кодовой группы, что соответствует максимальному (положительному или отрицательному) изменению сигнала АИМ. Качество связи считается удовлетворительным, если в каждом канале наблюдается не более одного щелчка в минуту. При частоте дискретизации, равной 8 кГц, по каналу передается 8000 x 60 = 480 тыс. кодовых групп в минуту, причем опасными в отношении щелчков являются 960 тыс. старших разрядов. Если считать, что вероятность ошибки для любого разряда кодовой группы одинакова, то при допущении одного щелчка в минуту вероятность ошибки в линейном тракте не должна быть более 1/960 000 = 10-6.
С учетом передачи данных, которая более чувствительна к ошибкам передачи, для эталонного международного соединения протяженностью 27 500 км величина BER не должна превышать 10-7.
Ошибки можно обнаружить двумя основными методами.
Во-первых, во время приемки и настройки линий связи, поиске неисправностей и ремонте выполняются измерения с перерывом связи, которые реализуются по трем схемам подключения: точка-точка, шлейф и транзит.
Во-вторых, для мониторинга сети и качественной оценки ее состояния, обнаружения и устранения повреждений используются измерения без перерыва связи.
Измерение BER без перерыва связи требует точного знания структуры цифрового сигнала. Таким сигналом в составе цикла, например первичного цифрового сигнала Е-1, является цикловой синхросигнал, занимающий 7 бит нулевого канального интервала (КИ) сигнала E-1.
Цикловой сигнал передается в каждом втором цикле сигнала E-1, причем каждый цикл E-1 содержит 32 КИ и, следовательно, 32 х 8 = 256 бит. Таким образом, относительная доля циклового синхросигнала в сигнале E-1 составляет 7/(256 x 2) < 1,4%. Поэтому достоверность оценки BER с помощью циклового синхросигнала очень низка.
Еще один известный метод оценки качества цифровой передачи основан на обнаружении ошибок кода. Он используется, например, в цифровых трактах T-1/E-1, где применяются коды с чередованием полярности единиц AMI и HDB-3. Однако с помощью измерителя ошибок кода нельзя выявить истинное значение коэффициента битовых ошибок. Отклонения между результатами измерения ошибок кода и обычного измерения ошибок методом побитового сравнения становятся особенно заметными при коэффициентах ошибок более 10-3. Кроме того, нарушение правил кодирования часто распространяется и на нескольких бит, находящихся после бита с ошибкой. Вследствие этого зависящее от содержания сигнала смещение и погрешность при больших коэффициентах ошибок делают невозможным точный анализ распределения ошибок.
Итак, практическая оценка BER возможна только в режиме измерений с перерывом связи и посылкой эталонных испытательных сигналов. При измерении BER испытательный сигнал должен как можно лучше имитировать реальный, т. е. иметь случайный характер. В качестве такого испытательного сигнала обычно используют псевдослучайную последовательность битов (ПСП) с заданной структурой, близкой к настоящему информационному сигналу. Такие последовательности формируются тактируемыми регистрами сдвига с обратной связью.
Цифровой испытательный сигнал заменяет обычно передаваемый информационный сигнал и оценивается на приемном конце измерителем ошибок.
Таким образом, необходимый в условиях нормальной эксплуатации непрерывный мониторинг ошибок цифровой передачи методом BER без перерыва связи практически невозможен.
В настоящее время для оценки качества цифровых систем передачи в эксплуатационных условиях применяется метод измерения блочных ошибок. Как нетрудно догадаться, главное его достоинство состоит в том, что он основан на использовании самого информационного сигнала и выполняется без прерывания связи.
Все методы измерения блочных ошибок предполагают введение избыточности в информационный сигнал, обработку этого вспомогательного сигнала по определенному алгоритму и передачу результата обработки на принимающую сторону, где принятый сигнал обрабатывается по тому же алгоритму, что и при передаче, а итог сравнивается с результатом обработки, полученным от передающей стороны. При их разнице переданный блок считается ошибочным.
Известно несколько способов обнаружения блочных ошибок. Способы поблочного контроля четности и контрольной суммы не позволяют распознать все типы ошибок, тем самым ограничивая их практическую применимость. Пожалуй, единственным универсальным способом измерения ошибок без перерыва связи является контроль при помощи циклического избыточного кода (Cyclical Redundancy Check, CRC).
�
Таблица 1. Измерения в цифровых системах связи и соответствующие им процедуры могут применяться для решения целого ряда задач.
| Область применения измерений | Измерительные процедуры |
| Разработка оборудования | Испытания с применением высокоточного контрольно-измерительного оборудования, отработка и проверка программного обеспечения, анализ результатов |
| Производство оборудования | Оперативные измерения параметров оборудования и сравнение их с эталонными, проверка дистанционного управления, контроль комплектующих изделий |
| Инсталляция и линейные испытания оборудования | Измерения с перерывом связи, долговременный анализ, сохранение результатов, использование высокоточных и стандартных приборов |
| Нормальная эксплуатация и техническое обслуживание при поиске и устранении неисправностей | Измерения с перерывом и без перерыва связи, включая непрерывный мониторинг с помощью встроенных систем тестирования и измерения с помощью стандартных приборов, имитация ошибок и аварийных сигналов, контроль качества каналов |
| Ремонт и калибровка — локализация дефектов монтажа и печатных плат, имитация условий эксплуатации | Лабораторное оборудование для проверки на соответствие нормативной документации, испытательные стенды |