Коэффициент битовых ошибок BER является ключевым параметром оценки качества цифровых систем передачи (ЦСП). Этот параметр незаменим при проверке цифровой аппаратуры (например, регенераторов) на этапе ее разработки и ремонта, когда оборудование выведено из эксплуатации. А что же делать, когда цифровые каналы и тракты требуется протестировать в процессе их нормальной эксплуатации?
У параметра BER есть и другой существенный недостаток: этот показатель практически невозможно использовать для оценки качества цифровой линии (скажем, для услуги IP телефонии). При заказе любой услуги связи пользователь и провайдер должны заключить соглашение о качестве обслуживания (Service Level Agreement, SLA), где четко оговариваются двусторонние обязательства. Для оценки качества сеанса связи в цифровом канале или тракте логично использовать относительное число ошибок передачи за фиксированные интервалы времени — за секунду или за период передачи фиксированной группы битов, которую называют блоком.
Именно эти показатели положены в основу двух базовых рекомендаций ITU-T — G.821 и G.826, о которых мы и поговорим ниже.
Прошло ужечетверть века с момента принятия рекомендации G.821 «Параметры ошибок международного цифрового соединения сети ISDN на скорости ниже первичной».
Первой сетью, где соединение между двумя пользователями было полностью цифровым, была сеть ISDN. Первичными скоростями ISDN являются скорости сигналов Т-1 и Е-1, равные 1544 и 2048 Кбит/c, соответственно. Ниже первичной стандартом предусматриваются скорости 64xN, где 64 Кбит/c представляет собой пропускную способность основного (или базового) цифрового канала (ОЦК), а N < 24 в случае Т-1 и N < 31 в случае Е-1.
В рекомендации G.821 в качестве параметра ошибок цифрового соединения выбраны два следующих.
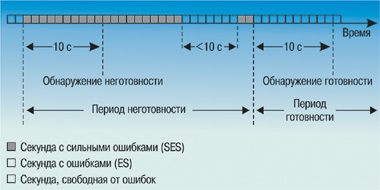
- Число секунд с ошибками (Errored Second, ES), к которым относится каждая секунда, в которой имеется по крайней мере одна ошибка. Как следует из определения, при таком подходе одиночная ошибка и пакет ошибок не различаются.
- Число секунд с многочисленными ошибками (Severely Errored Second, SES), где SES означает секунду с коэффициентом ошибок >= 10-3.
Поскольку оба параметра — и ES, и SES — зависят от времени измерения T, для практической оценки качества цифрового соединения применяют их относительные значения: Errored Second Ratio ESR =ES/T и Severely Errored Second Ratio SESR = SES/T.
Заметим, что наличие двух параметров оценки ошибок позволяет не только более точно определить качество цифрового соединения, но и во многих случаях оказывается полезным при локализации возможных повреждений.
По мере распространения широкополосных услуг связи рамки использования рекомендации G. 821 становились все более узкими. Попытки же приспособить ее для измерения широкополосных цифровых трактов оказались неудачными. Кроме того, определение параметров качества в G.821 основывается на оценке битовых ошибок, а те, в свою очередь, могут быть точно определены лишь тогда, когда достоверно известна измеряемая цифровая последовательность. Поэтому тестирование в соответствии с G.821 возможно только при выводе цифрового соединения из эксплуатации.
Таким образом, специалисты нуждались в новой рекомендации, где учитывались бы реалии цифровых сетей связи, включая потребность тестирования канала связи в рабочем режиме, в том числе и в цифровых соединениях с применением оборудования синхронной цифровой иерархии SDH и асинхронной передачи АТМ.
Всем этим требованиям отвечает рекомендация G.826 «Параметры и нормы ошибок международных цифровых соединений на скорости выше первичной», одобренная ITU-T в 1993 г. Она обеспечила решение трех главных задач по организации тестирования ошибок цифровых соединений:
- во время нормальной эксплуатации;
- на скоростях 1544 Кбит/c, 2048 Кбит/c и выше;
- в сетях с использованием технологий SDH и АТМ.
Первая задача была решена путем перехода от тестирования ошибок по битам к тестированию ошибок по блокам. Напомним, блок представляет собой группу последовательных битов, которые относятся к исследуемому цифровому тракту. Каждый бит принадлежит к определенному блоку. Контроль блоков выполняется с помощью встроенных в системы передачи специальных устройств, применение которых гарантирует обнаружение ошибки с надежностью не ниже 90%.
Ошибки цифрового сигнала могут быть обнаружены множеством способов без перерыва связи. О недостатках двух из них — методах обнаружения ошибок кода передачи и циклового синхросигнала в цикле сигнала E-1 — мы уже упоминали. Их ограничения состоят, прежде всего, в частном характере и недостаточной точности. Между тем важнейшими требованиями к методам обнаружения ошибок цифрового сигнала являются универсальность, экономичность и точность. Универсальность означает применимость метода к любому цифровому сигналу, экономичность — эффективное использование дополнительной пропускной способности, ключевое же требование — несомненно, высокая точность.
Среди множества известных способов блочного контроля ошибок трем указанным требованиям наиболее полно удовлетворяет метод циклического контроля по избыточности (Cyclic Redundancy Code, CRC).
Метод CRC основан на делении и умножении многочленов. При этом делимый многочлен представляет собой последовательную запись блока данных в двоичной форме. Например, в системе Е-1 блок данных, для которого рассчитывается CRC, состоит из 256 байт. Поэтому делимое записывается как двоичное число длиной 2048 бит, которое по особому правилу делится на выбираемый так называемый порождающий многочлен. Полученный остаток используется в качестве контрольной информации и передается по каналу связи вместе с информационным сигналом.
Аналогичная обработка полученного блока данных выполняется на принимающей стороне, и остаток деления многочленов сравнивается с переданным остатком. Различие указанных остаточных многочленов является признаком ошибки в цифровом сигнале.
В рекомендации G.826 определены три типа блочных ошибок:
- секунда с ошибками (Errored Second, ES), содержащая хотя бы один блок с ошибками или дефект;
- секунда c многочисленными ошибками (Severely Errored Second, SES), содержащая >= 30% блоков с ошибками или, по крайней мере, один период с серьезными нарушениями соединения (Severely Disturbed Period, SDP);
- блок с фоновой ошибкой (Background Block Error, BBE) — блок с ошибками вне отмеченных ошибками секунд (SES).
При измерениях во время нормальной эксплуатации SDP наблюдаются, если появляются так называемые дефекты, по-разному определяемые в плезиохронных (PDH) и синхронных (SDH) системах, а также при асинхронной передаче (АТМ). К этой категории принадлежат пропадание сигнала (Loss of Signal, LOS), потеря цикловой синхронизации (Loss of Frame, LOF) или прием сигнала индикации аварийного состояния (Alarm Indication Signal, AIS). При измерениях с выводом из эксплуатации опознается SDP, если частота ошибок в течение времени тестирования составляет >= 10-2.
В рекомендации G.826, как и в G.821В, применяются три относительных параметра блочных ошибок:
- коэффициент секунд с блочными ошибками (Errored Second Ratio, ESR), равный отношению секунд с блочными ошибками к общему числу секунд измерения;
- коэффициент секунд с сильными блочными ошибками (Severely Errored Second Ratio, SESR), равный отношению секунд c сильными блочными ошибками к общему числу секунд измерения;
- коэффициент блоков с фоновыми ошибками (Background Block Error Ratio, BBER), равный отношению блоков с ошибками к общему числу блоков в сеансе измерения, причем при расчете BBER все блоки из интервалов с сильными ошибками исключаются.
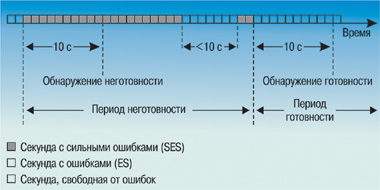
Нужно иметь в виду, что при расчете всех трех параметров учитывается только время, в течение которого система передачи находится в состоянии готовности.
Параметр готовности цифрового соединения обязательно включается в SLA.
Система считается неготовой с того момента времени, после которого имеют место 10 последовательных секунд с сильными ошибками SES. Согласно тому же определению, система передачи вновь возвращается в состояние готовности, если по крайней мере в течение 10 последовательных секунд ошибок не наблюдается или это ошибки SES.
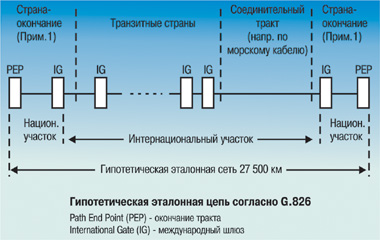
Нормированный показатель готовности системы представляет собой отношение времени ее готовности к общему времени работы. Реальные значения показателя надежности системы составляют 99,5%. Если в аналоговых системах передачи (АСП) мощность помех в каналах пропорциональна длине соединения, то в ЦСП существует линейная зависимость числа ошибок от длины соеди-нения. Поэтому при расчете ошибок в ЦСП, как и при расчете шумов в АСП, используется принцип гипотетической эталонной цепи (Hypothetical Reference Path, HRP).
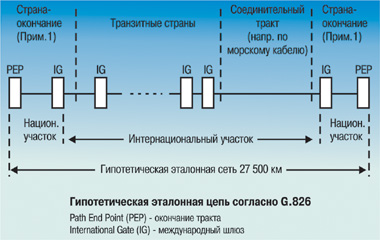
Эталонные цепи в соответствии с рекомендациями G.821 и G.826 имеют протяженность 27 500 км и описывают распределение показателей ошибок вдоль международного цифрового соединения. Обе цепи отражают особенности нормирования показателей ошибок, утвержденные в указанных рекомендациях.
3.1 Бинарный канал и методы анализа его параметров.
Рассмотрение
методологии измерений цифровых каналов
начнем с описания методов измерения
цифровых каналов с передачей информации
в простой двоичной форме (без линейного
кодирования) — бинарных цифровых каналов
(рис. 6). В современных
информационно-телекоммуникационных
системах для передачи цифровой информации
используются различные типы модуляции
и многоуровневого кодирования, однако
оконечное оборудование систем передачи
в той или иной степени использует именно
бинарный цифровой канал, поэтому
методология измерений бинарного канала
является фундаментом измерений цифровых
каналов связи. Более того, для анализа
систем с различными типами модуляции
и кодирования используются данные
методологии измерений по битам, т.е.
имитируется процесс декодирования
(демодуляции) сигнала до двоичного вида,
а затем полученный сигнал анализируется.
Таким образом, методология измерений
параметров бинарного канала представляет
собой инвариант методологии измерений
любых цифровых каналов.

Рисунок 6 — Бинарный
цифровой канал
Основное назначение
бинарного цифрового канала — это передача
цифровой информации в двоичной форме,
т.е. в виде битов, поэтому основные
параметры качества такой цифровой
передачи связаны с параметром ошибки
по битам (Bit Error Rate — BER) и его производными.
Измерения по параметру BER вошли в методики
измерений всех первичных и вторичных
сетей.
Для правильного
понимания всех нюансов измерений
цифровых каналов связи необходимо
глубокое понимание технологии измерений
бинарного цифрового канала.
Различаются два
типа измерений бинарного канала —
измерения с отключением канала и
измерения без отключения канала. При
отключении канал не используется в
процессе измерений для передачи реального
цифрового трафика. В качестве источника
и приемника двоичного сигнала используются
анализаторы цифрового канала. Измерения
без отключения канала предусматривают
использование специальных алгоритмов
анализа параметров канала в процессе
при передаче реального трафика.
При измерениях с
отключением канала сигнал передается
в виде тестовой последовательности,
которая принимается на другом конце
канала (приемник) и затем проводится
анализ ошибок, вносимых каналом.
Анализатор приемника должен обеспечивать
предсказание структуры последовательности,
т.е. требуется так называемая синхронизация
тестовой последовательности. Для
измерений используются разные тестовые
последовательности, фиксированные и
псевдослучайные, с различными алгоритмами
синхронизации тестовой последовательности.
Измерения с отключением канала — это
единственный метод анализа параметров
бинарного цифрового канала с точностью
до единичной ошибки по битам (битовая
ошибка). Это гарантируется принципом
сравнения реально принятой последовательности
битов с предсказанной, которая, в свою
очередь, точно совпадает с генерируемой
последовательностью.
Измерения без
отключения канала часто называются
мониторингом, поскольку проводятся в
режиме работающего канала, а анализатор
в этом случае подключается параллельно
и осуществляет пассивный мониторинг
канала. Алгоритм организации измерений
основан на применении различных типов
цикловых кодов или служебной информации,
передаваемой в канале. Действительно,
в реально работающем канале, с реальным
трафиком нельзя предсказать передаваемую
информацию, следовательно нельзя просто
сравнить реальную последовательность
битов с предсказанной последовательностью,
поэтому невозможно локализован единичную
битовую ошибку. Методы измерения без
отключения канала основаны на идентификации
битовой ошибки в некотором блоке
переданной информации, таким образом,
объективная точность измерения ограничена
размерами блока. Обычно две ошибки в
блоке идентифицируются как одна. В то
же время несомненное преимущество
метода — отсутствие необходимости
отключения канала — определило широкое
его распространение.
Возникновение
ошибок по битам и их влияние на параметры
цифровой передачи
В аналоговых
системах передачи канал, воздействуя
на параметры передаваемого аналогового
сигнала, снижает качественные параметры
сигнала. В цифровых системах передачи
различные воздействия на цифровой канал
приводят к снижению основного качественного
параметра — параметра ошибки. Причины
возникновения ошибок в цифровом канале
имеют аналоговую природу, поскольку
связаны с интерференцией, затуханием
в линии и различными аддитивными шумами
(рис. 7).

Рисунок 7 — Основные
источники ошибок в цифровом канале
На рисунке 7
представлены основные источники ошибок
в цифровом канале: искажения, наличие
импульсных помех, аддитивный шум в
канале и затухание в линии. Как видно,
наличие искажений в канале может быть
связано как с затуханием, так и с
отражением сигнала. Источниками шумов
выступают физически разрушенный кабель
(например, разбитая пара), слишком малое
поперечное сечение, большая распределенная
емкость в кабеле. Другим важным источником
шумов являются интерферирующие импульсы
или импульсные помехи в канале. Источниками
ошибок здесь могут быть силовые кабели,
проложенные в непосредственной близости
от линии связи, нарушение оболочки
кабелей, сигнализация по постоянному
току. Наиболее существенным и многоплановым
фактором влияния на параметры цифрового
канала является наличие аддитивных
шумов различной природы. Источниками
ошибки здесь могут быть нарушение
балансировки кабеля, параметра скручивания
витой пары, интерференция с различными
радиочастотными и СВЧ-сигналами, сигналы
вызова, нарушение полярности кабеля
(перепутанные жилы, короткое замыкание
между жилами и т.д.) Высокий уровень
шумов может привести к значительному
увеличению параметра ошибки.
Цифровые системы
передачи имеют большую по сравнению с
аналоговыми системами помехозащищенность.
Однако закономерность влияния уровня
шума на параметр ошибки справедлива
только для большого отношения сигнал/шум.
Если рассматривать влияние интерференции
на параметры цифрового канала, то эту
закономерность можно схематически
представить графиком рисунок 8. Как
видно из графика, цифровые системы
передачи имеют определенный порог
чувствительности к интерференции, в
отличие от аналоговых систем передачи,
где имеет место прямая зависимость
эффекта влияния интерференции от ее
уровня. Однако влияние интерференции
на параметры цифровых систем передачи
более существенно, и с определенного
уровня эффект этого влияния даже
превышает эффект воздействия на параметры
аналоговых систем.

Рисунок 8 — Влияние
интерференции на параметры аналоговых
и цифровых систем передачи
Наконец, важным
источником шумов в цифровых каналах
является затухание в кабелях и линиях
передачи, причем не только высокий
уровень затухания, но и его неравномерная
характеристика приводят к появлению
субгармоник, вносящих дополнительный
аддитивный шум.
Если рассматривать
источники ошибок не только в канале, но
и в цифровой системе передачи, то можно
выделить внутренние и внешние источники.
К внутренним
источникам ошибок относятся:
-
различная
нестабильность во внутренних цепях
синхронизации цифровых устройств,
дрейф в системе внутренней синхронизации
устройства; -
нестабильность,
связанная с измерением характеристик
электронных компонентов в составе
устройства; -
перекрестные
помехи в цепях устройств; -
нарушения в работе
эквалайзеров и в процессах, связанных
с неравномерностью АЧХ; -
повышение порога
по шуму, связанное с изменением параметров
модулей устройств со временем.
К внешним источникам
ошибок можно отнести:
-
перекрестные
помехи в каналах передачи; -
джиттер в системе
передачи; -
электромагнитная
интерференция (от машин, флуорисцентных
ламп и т.д.); -
нестабильность
источников питания устройств; -
импульсные шумы
в канале; -
механические
повреждения, воздействие вибрации,
плохие контакты; -
деградация
качественных параметров среды передачи
(электрического или оптического кабеля,
радиочастотного канала и т.д.); -
глобальные
нарушения, связанные с разрушением
канала цифровой передачи.
Влияние всех
перечисленных источников ошибок и
интерференции значительно повышается
при снижении параметра отношения
сигнал/шум
Если рассмотреть
влияние интерференции на параметры
качества работы цифровой системы
передачи, можно отметить, что влияние
битовых ошибок отличается для различных
услуг и систем передач в зависимости
от следующих факторов:
-
типа передаваемого
трафика (голос, данные, видео, мультимедиа
и т.д.); -
типа системы
передачи, принципов кодирования и
наличия цепей резервирования передачи
сигнала; -
количества и
частоты битовых ошибок; -
распределения
битовых ошибок (равномерно распределенные
ошибки, ошибки, возникающие пакетами
и т.д.); -
источника
интерференции; -
устойчивости
принятого в системе передачи принципа
передачи цифровой информации к ошибкам; -
устойчивости
принятого в системе передачи принципа
передачи цифровой информации к другим
факторам воздействия (джиттеру,
нестабильности синхронизации и т.д.»)
Основные параметры,
измеряемые в бинарном цифровом канале
Все параметры,
измеряемые в бинарном цифровом канале,
будут встречаться в технологии измерений
цифровых каналов первичной и вторичных
цифровых сетей. Прежде чем рассматривать
технологию измерений параметров
бинарного цифрового канала, необходимо
определить эти параметры. Ниже приведены
основные параметры, измеряемые в бинарном
цифровом канале. Они описаны в соответствии
с сокращениями, используемыми в меню
большинства приборов. В основном это
параметры, используемые для анализа
характеристик бинарного канала согласно
ITU-T рекомендации G.821, G.826 и М.2100.
AS — Availability Seconds —
время готовности канала (с) — вторичный
параметр, равный разности между общей
длительностью теста и временем
неготовности канала.
AS(%) — Availability Seconds —
относительное время готовности канала
— параметр, характеризующий готовность
канала, выраженный в процентах, является
первичным параметром и входит в число
основных параметров ITU-T рекомендации
G.821. Его можно интерпретировать как
вероятностную меру качества предоставляемого
пользователю канала.
ВВЕ — Background Block
Error — блок с фоновой ошибкой — блок с
ошибками не является частью SES, применяется
при анализе ошибок по блокам. Важный
параметр, вошедший в рекомендации ITU-T
G.826.
BIT
или ERR
BIT
— Bit
Errors
— число ошибочных битов — параметр,
используемый при анализе канала на
наличие битовых ошибок и являющийся
числителем в выражении для расчета BER.
Битовые ошибки подсчитываются только
в период пребывания канала в состоянии
готовности.
ЕВ — Error
Block
— число ошибочных блоков — параметр,
используемый при анализе каиала на
наличие блоковых ошибок и являющийся
числителем в выражении для расчета
BLER.
Блоковые ошибки подсчитываются только
в период пребывания канала в состоянии
готовности.
BBER
— Background
Block
Error
Rate
— коэффициент ошибок по блокам с фоновыми
Ошибками — отношение числа блоков с
фоновыми ошибками ко всему количеству
блоков в течение времени готовности
канала за исключением всех блоков в
течении SES.
Параметр входит в рекомендации ITU-T
G.826.
RATE
или BER
— Bit
Error
Rate
— частота битовых ошибок, коэффициент
ошибок по битам — основной параметр в
системах цифровой передачи, равный
отношению числа битовых ошибок к общему
числу бит, переданных за время проведения
теста по каналу, находящемуся в состоянии
готовности. При обнаружении десяти
последовательных секундных интервалов,
сильно пораженных ошибками (SES),
анализатор ИКМ переключается на подсчет
времени неготовности канала. При этом
измерение BER
прерывается до восстановления
работоспособности канала. Таким образом,
управляемые проскальзывания, связанные
с потерей одного или нескольких циклов
информации, практически не влияют на
значение BER.
Измерения параметра BER
универсальны, они не требуют наличия в
потоке Е1 цикловой и сверхцикловой
структуры, однако необходима передача
специальной тестовой последовательности.
Проводятся только при полном или
частичном отключении цифрового канала
от полезной нагрузки.
BLER
— Block
Error
Rate
— частота блоковых ошибок, коэффициент
ошибок по блокам — редко применяемый на
практике параметр, равный отношению
числа ошибочных блоков данных к общему
числу переданных блоков. Под блоком
понимается заданное количество битов.
Ошибочным блоком считается блок,
содержащий хотя бы один ошибочный бит.
Обычно значение параметра BLER
больше (хуже), чем параметра BER.
Его целесообразно измерять только в
тех сетях передачи данных, где информация
передается блоками фиксированного
размера, а параметр BLER
является важной характеристикой канала
с учетом кадровой (цикловой) структуры
передачи. Например, для сетей ATM
принята кадровая структура передачи в
виде кадров длиной 53 бита. Ошибочный
кадр уничтожается (дискартируется). В
этом случае можно считать кадр ATM
блоком длиной в 53 бита, а эквивалентом
BLER
будет параметр ошибки по кадрам CER
(Cell
Error
Rate).
В другом примере в качестве эквивалента
блока может выступать сверхцикл ИКМ, а
эквивалентом BLER
будет ошибка по CRC.
CLKSLIP
или SLIP
— Clock
Slips
— число тактовых проскальзываний —
параметр характеризуется числом
синхронных управляемых проскальзываний,
появившихся с момента начала теста.
Проскальзыванием называется повторение
или исключение группы символов в
синхронной или плезиохронной
последовательности двоичных символов
в результате различия между скоростями
считывания и записи в буферной памяти.
Поскольку проскальзывание ведет к
потере части информации, что в свою
очередь ведет к потере цикловой
синхронизации, на практике используются
эластичные управляемые буферы с
возможностью управления проскальзываниями.
В этом случае проскальзывания называются
управляемыми. В наибольшей степени
параметр CLKSLIP
связан с параметром неготовности канала
(UAS).
Сопоставление CLKSLIP
и UAS
позволяет выявить причину неготовности
канала, в частности, связана ли она с
нарушением синхронизации. Значение
параметра CLKSLIP
зависит от размера имитируемого прибором
буфера, емкостью от 1 бита до нескольких
циклов.
CRC
ERR
— CRC
Errors
— число ошибок CRC
— параметр ошибки, измеренный с
использованием циклового избыточного
кода (CRC),
распространенный параметр определения
ошибок реально работающего канала без
его отключения и без передачи тестовой
последовательности. Данные кода
помещаются в состав сверхцикла ИКМ,
Необходимым условием измерения параметра
CRC
является наличие механизма формирования
кода в аппаратуре передачи. Встроенные
средства самодиагностики большей части
современных цифровых систем передачи
используют именно этот механизм. Таким
образом, при измерении параметра CRC
можно не только оценить частоту ошибок,
но в проверить работу системы
самодиагностики.
При использования
CRC
часто возникает вопрос о необходимости
одновременного измерения и параметра
BER.
Необходимо учитывать две особенности
применения CRC.
Во-первых, каждая ошибка CRC
не обязательно связана с ошибкой одного
бита информации. Несколько битовых
ошибок в одном сверхцикле могут дать
только одну ошибку CRC
для блока Во-вторых, несколько битовых
ошибок могут компенсировать друг друга
и не входить в суммарную оценку CRC.
Таким образом, при использовании CRC
можно говорить не об истинном уровне
ошибок в канале, а только об оценке их
величины. Тем не менее CRC
является удобным методом контроля
ошибок при проведении сервисного
наблюдения за работающим каналом, когда
практически невозможно измерить реальные
параметры битовых ошибок.
CRC
RATE
— CRC
Errors
Rate
— частота ошибок CRC
— показывает среднюю частоту ошибок
CRC.
По описанным выше причинам бывает лишь
частично коррелирован с параметром
BER.
DGRM
— Degraded
Minutes
— число минут деградации качества —
несколько временных интервалов
продолжительностью 60 с каждый, когда
канал находится в состоянии готовности,
но BER=10″‘.
Ошибки во время неготовности канала не
считаются, а интервалы по 60 с в состоянии
готовности канала, пораженные ошибками
несколько раз, суммируются.
DGRM
(%) — Degraded
Minutes
— процент минут деградации качества —
число минут деградации качества,
выраженное в процентах по отношению ко
времени, прошедшему с момента начала
тестирования.
EFS
— Error
Free
Seconds
— время, свободное от ошибок (с), — один
из первостепенных параметров, входящих
в рекомендации G.821
и М.2100/М.550. Отражает время, в течение
которого сигнал был правильно
синхронизирован, а ошибки отсутствовали,
т.е. общее время пребывания канала в
состоянии готовности.
EFS(%)
— Error
Free
Seconds
— процент времени, свободного от ошибок
(с), — то же, что и предыдущий параметр,
только выраженный в процентах по
отношению к общему времени с момента
начала тестирования.
ES
— Errors
Seconds
— длительность поражения сигнала
ошибками, количество секунд с ошибками
(с) — параметр показывает интервал
времени поражения всеми видами ошибок
в канале, находящемся в состоянии
готовности. ES
связан с другими параметрами простым
соотношением: AS
= ES
+ EFS.
ES(%)
— Errors
Seconds
— процент поражения сигнала ошибками
— параметр связан с %EFS
соотношением: %ES
+ %EFS
= %AS.
ESR
— Error
Seconds
Rate
— коэффициент ошибок по секундам с
ошибками — параметр, практически равный
ES(%).
LOSS
— Loss
of
Signal
Seconds
— длительность потери сигнала (с) —
параметр характеризует интервал времени,
в течение которого сигнал был потерян.
PATL
— Pattern
Loss
— количество потерь тестовой
последовательности — параметр
характеризуется числом потерь тестовой
последовательности, появившихся с
момента начала теста.
PATLS
— Pattern
Loss
Seconds
— продолжительность времени потери
тестовой последовательности — общее
время потери тестовой последовательности
с момента начала теста.
SES — Severally Errors Seconds
— продолжительность многократного
поражения ошибками, количество секунд,
пораженных ошибками (с), — интервал
времени, пораженный ошибками несколько
раз, измеряемый в секундах. В это время
частота битовых ошибок составляет
BER>10-3. Подсчет SES производится только
во время готовности канала. Из определения
видно, что SES — составная часть параметра
ES. Вторая интерпретация параметра SES
связана с измерениями по блоковым
ошибкам, тогда SES определяется как
односекунд-ный интервал времени,
содержащий более 30 % блоков с ошибками.
Можно сказать, что во время подсчета
параметра SES, качество канала чрезвычайно
плохое. Параметр SES очень важен и входит
в перечень обязательных к измерению
параметров ИКМ рекомендаций G.821 и
М..2100/М.550.
SES(%) — Severally Errors
Seconds — относительная продолжительность
многократного поражения ошибками — тот
же параметр, выраженный в процентах.
SESR — Severally Error Seconds
Rate — коэффициент ошибок по секундам,
пораженным ошибками — параметр, практически
равный SES(%).
SLIPS или CKSLIPS — Clock
Slips Seconds — продолжительность тактовых
проскальзываний — параметр характеризуется
общим временем с наличием синхронных
управляемых проскальзываний.
UAS — Unavailability Seconds —
время неготовности канала (с) — время
неготовности канала начинает отсчитываться
с момента обнаружения 10 последовательных
интервалов SES и увеличивается после
каждых следующих 10 последовательных
интервалов SES. Счет UAS обычно начинается
с момента потери цикловой синхронизации
или сигнала. Этот параметр связан со
всеми предыдущими параметрами и
определяет стабильность работы цифрового
канала.
UAS(%) — Unavailability
Seconds — относительное время неготовности
канала — предыдущий параметр, выраженный
в процентах.
Тестовые
последовательности
Для организации
измерений с отключением канала
используются генератор и анализатор
тестовой последовательности, подключенные
к разным концам цифрового канала. Эти
приборы синхронизированы по тестовой
последовательности, т.е. анализатор
может предсказать следующее значение
каждого принимаемого бита.
В практике
используются два типа тестовых
последовательностей — фиксированные и
псевдослучайные (ПСП, PRBS — Pseudorandom Binary
Sequence). Фиксированными являются
последовательности чередующихся
повторяемых комбинаций битов. В качестве
примера рассмотрим альтернативную
фиксированную последовательность типа
1010, в которой после каждого 0 идет 1.
Процедура синхронизации тестовой
последовательности в этом случае может
быть чрезвычайно проста: анализатор
заранее запрограммирован на ожидание
альтернативной последовательности.
При приеме 1 он предсказывает появление
в качестве следующего бита 0, и в случае
приема 1 делается вывод о битовой ошибки.
Реальная процедура синхронизации
несколько сложнее, поскольку требуется
проверка, не является ли первый принятый
бит ошибочным. Для этого проверяется
правильность синхронизации в течение
нескольких последовательных групп
битов (блоков), при этом сама процедура
синхронизации аналогична. Такая процедура
синхронизации не указывает на начало
цикла.
При фиксированной
тестовой последовательности с указанием
начала цикла, начало цикла задается
специальным битом или последовательностью
битов (далее называется бит f).
В практике могут
использоваться обе процедуры синхронизации
тестовой последовательности. В последнее
время производители склоняются к
внедрению процедуры с указанием начала
цикла, поскольку в этом случае синхронизация
тестовой последовательности осуществляется
в течении нескольких циклов — порядка
8-16 переданных битов. Исключение составляют
постоянные фиксированные последовательности
0000 и 1111, где процедура с указанием начала
цикла не имеет смысла.
В современной
практике используются следующие
фиксированные тестовые последовательности:
1111 — все единицы —
фиксированная последовательность
используется обычно для расширенного
и стрессового тестирования канала.
Например, если последовательность
послана в неструктурированном потоке
Е1, то это будет понято как сигнал
неисправности (AIS).
1010 — альтернативная
— фиксированная последовательность из
чередующихся нулей и единиц.
Последовательность может передаваться
без указания или с указанием начала
цикла -f 0101 0101.
0000 — все нули —
фиксированная последовательность
используется обычно для расширенного
и стрессового тестирования канала.
FOX — фиксированная
последовательность FOX используется в
приложениях передачи данных.
Последовательность в ASCII переводится
как «Quick brown fox.». Синхронизация
последовательности осуществляется
правильным переводом предложения. Ниже
приведена последовательность:
2А, 12, А2, 04, 8А, АА,
92, С2, D2, 04, 42, 4А, F2, ЕА, 72, 04, 62, F2, 1А, 04, 52, АА,
В2, ОА, СА, 04, F2, 6А, А2, 4А, 04, 2А, 12, А2, 04, 32, 82,
5А, 9А, 04, 22, F2, Е2, 04, 8С, 4С, СС, 2С, АС, 6С, ЕС,
1C, 9С, ОС, ВО, 50
1-3 — одна единица
на три бита — промышленный стандарт 1 в
3 последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 010.
1-4 — одна единица
на три бита — промышленный стандарт 1 в
4 последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 0100.
1-8 — одна единица
на восемь битов — промышленный стандарт
1 в 8 последовательностях используется
для расширенного и стрессового
тестирования канала. Последовательность
передается с указанием на начало цикла:
f 0100 0000.
3-24 — три единицы
на 24 бита — промышленный стандарт 3 в 24
последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 0100 0100 0000
0000 0000 0100.
Кроме перечисленных
стандартных фиксированных последовательностей
могут использоваться произвольные
слова и предложения. Процедура
синхронизации и анализа битовых ошибок
может быть организована на основе
указания на начало цикла или на основе
проверки правильности перевода слов и
предложений. Вторая процедура наиболее
часто используется в практике.
Использование
фиксированных последовательностей
рекомендовано главным образом для
стрессового тестирования аппаратуры
кодирования/декодирования. Поэтому
наиболее часто используются тестовые
последовательности со множеством нулей.
Как известно, при передаче двоичной
последовательности наличие
последовательности из нескольких нулей
равносильно отсутствию сигнала (0 обычно
передается сигналом нулевой амплитуды).
В результате генерации последовательностей
со множеством нулей можно проанализировать
работу канала в случае естественного
пропадания сигнала.
Например, в
системах ИКМ (поток Е1) в недавнем прошлом
использовался линейный код AMI, в котором
от-сутствуem устойчивость битовой
синхронизации при появлении длинных
последовательностей нулей. В результате
необходим анализ частоты сбоев битовой
синхронизации измеряемого канала с
кодированием AMI. Для измерений обычно
используются промышленные стандарты
с длинными последовательностями нулей
— 1-4, 1-8 или 3-24. Длинная последовательность
нулей в этом случае создает возможность
сбоя битовой синхронизации, фиксируемого
как битовые ошибки при передачи единиц.
Неустойчивость
битовой синхронизации в случае появления
длинных последовательностей нулей
кодирования AMI было преодолено в
современном коде HDB3 ИКМ-систем, где
используется процедура инверсии шестого
нуля в алгоритме кодирования.
Работоспособность этой процедуры можно
проверить при помощи промышленных
стандартов с длинными последовательностями
нулей — 1-4, 1-8 или 3-24. Кроме того, стабильность
битовой синхронизации может быть
проверена генерацией последовательности
0000.
Вторым направлением
стрессового тестирования является
анализ систем передачи с заполнением.
Например, в некоторых
ИКМ-системах при организации транзита
сбой на удаленном конце приводит к тому,
что поток Е1 заполняется единицами. Эта
процедура используется для имитации
сбоя: передатчик генерирует
последовательность 1111 и анализирует
сигнал AIS, передаваемый принимающей
стороной.
Наличие систем с
заполнением требует с особенной
осторожностью использовать при измерениях
фиксированные последовательности. В
некоторых случаях фиксированная
последовательность может совпадать с
последовательностью заполнения, что
может привести к ошибочным результатам.
Известен случай
анализа спутникового канала по параметру
ошибки (ВЕR), при этом использовалась
альтернативная последовательность
1010, которая совпала с последовательностью
заполнения выходного канала передачи
данных от модема. В результате даже
после пропадания радиочастотного
спутникового канала анализатор выдавал
результат по параметру ошибки BER=10-5
Чтобы избежать
подобных ситуаций, рекомендуется
использовать фиксированные
последовательности в виде слов или
предложений (например, применение
последовательности FOX в описываемом
примере сразу идентифицировало
неготовность канала) или псевдослучайной
последовательности (ПСП).
Псевдослучайные
последовательности характеризуются
количеством регистров сдвига, используемых
при генерации N с длинной цикла
последовательности L=2N
— 1. Структура псевдослучайной
последовательности связана со схемой
генератора ПСП, представленной на
рисунке 9.

Рисунок 9 — Генератор
псевдослучайной последовательности
В основе принципа
работы генератора ПСП лежит процедура
сверточного кодирования с использованием
N регистров сдвига с одной обратной
связью перед регистром N. Это экви
валентно кодеру сверточного кодирования
с полиномом Dn+Dn+1+l.
Соответственно длина кодированной
последовательности зависит от количества
регистров сдвига и составляет 2N-L
Процедура предусматривает циклическое
повторение последовательности через
2N-1
тактовых импульсов (эквивалентно,
битов). Большее количество регистров
определяет меньшую повторяемость
последовательности.
Для анализа
принимаемой ПСП используются два типа
анализаторов, схемы которых представлены
на рис. 6.5 и 6.6. Наиболее часто используется
метод анализа ПСП с обратной связью
(рис. 10). В этом случае последовательность
синхронизируется следующим образом:
петля обратной связи размыкается, данные
загружаются в регистры сдвига до полного
заполнения, затем петля обратной связи
замыкается и производится синхронизация
по тестовой последовательности. Две
несинхронные ПСП имеют относительный
параметр BER приблизительно равный 0,5,
таким образом, для достижения синхронизации
по тестовой последовательности критерий
синхронизации выбирается ниже этого
значения.

Рисунок 10 — Анализатор
ПСП с замкнутой обратной связью, метод
побитового измерения ошибок

Рисунок 11 — Анализатор
ПСП без обратной связи
Вторым методом
построения анализатора ПСП является
метод без обратной связи (рис. 11). Этот
метод в настоящее время практически не
используется и признан устаревшим.
Основным недостатком его является
наличие процессов подавления данных
при измерениях каналов с высоким
параметром ошибки. Метод был разработан
для низкого параметра ошибки в
предположении, что сами ошибки возникают
случайным образом и описываются
нормальным распределением.
Современные системы
передачи используют алгоритмы кодирования
и принципы передачи, приводящие к
появлению всплесков ошибок, возникающих
в виде пакетов. В этом случае алгоритм
анализа без обратной связи характеризует
нестабильную работу.
В дальнейшем при
описании анализа ПСП будем исходить из
принципов анализа с обратной связью.
В современной
практике используются следующие типы
псевдослучайных последовательностей:
2е23 — стандартная
2е23-1
псевдослучайная последовательность
битов. Сигнал формируется из 23-фазного
регистра сдвига без ограничения нулей.
Эта последовательность соответствует
техническому стандарту ITU 0.151. Получила
распространение для тестирования
высокоскоростных цифровых каналов
первичной сети (например, каналов SDH).
2е20 — стандартная
2е20-1
псевдослучайная последовательность
битов. Сигнал формируется из 20-фазного
регистра сдвига без ограничения нулей.
Эта последовательность соответствует
техническому стандарту ITU 0.151.
2е15 — стандартная
2е15-1
псевдослучайная последовательность
бит. Сигнал формируется из 15-фазного
регистра сдвига без ограничения нулей.
Последовательность может содержать до
14 нулей в строке. Последовательность
получила наиболее широкое распространение
для анализа каналов PDH с относительно
невысокой скоростью передачи.
20ITU — стандартная
2е20-1
псевдослучайная последовательность
бит. Сигнал формируется из 20-фазного
регистра сдвига без ограничения нулей.
Последовательность соответствует
техническому стандарту ITU 0.153. Однако,
эта последовательность отличается от
2е20 последовательности, потому что
используются разные механизмы обратной
связи. 20ITU подавляет последовательности
из более чем 18 нулей, в отличие от 14 нулей
в 2е20.
2047 — короткая ПСП.
Сигнал формируется из 11 -фазного регистра
сдвига без ограничения нулей. Стандартный
2047-битный код используется для анализа
вторичных сетей передачи данных,
приложений DDS и ISDN.
511 — короткая ПСП.
Сигнал формируется из 9-фазного регистра
сдвига без ограничения нулей. Стандартный
511-битный код применяется для анализа
вторичных сетей передачи данных, в
частности он соответствует техническому
стандарту ITU V.52.
127 — короткая ПСП.
Сигнал формируется из 7-фазного регистра
сдвига без ограничения нулей. Стандартный
127-битный код используется для анализа
низкоскоростных каналов передачи данных
(например, модемных каналов).
63 — самая короткая
ПСП, применяемая в практике измерений.
Сигнал формируется из 6-фазного регистра
сдвига без ограничения нулей. Стандартный
63-битный код применяется для анализа
низкоскоростных каналов передачи данных
(например, модемных каналов).
Таким образом,
основными характеристиками ПСП являются:
-
длина последовательности
в битах; -
вид полинома,
соответствующая конфигурация регистров
генератора и анализатора ПСП; -
спектральный
состав сигнала, зависящий от скорости
передачи в канале.
Спектральный
состав псевдослучайной последовательности
схематически представлен на рис. 6.7.
В зависимости от
скорости передачи данных в канале
используются ПСП различной длины: чем
больше скорость, тем большая длина
последовательности допускается.
Рекомендация ITU-T 0.151 определяет значения
используемых длин ПСП в зависимости от
скорости цифровой передачи в канале
согласно таблице 1. Кроме того существует
также рекомендация по выбору тестовой
последовательности для канала 64 кбит/с
— 211-1,
приведенная в ITU-T рекомендация 0.152.

Рисунок 12 —
Спектральный состав ПСП с кодированием
NRZ
Таблица
1 — Длины тестовых последовательностей
ПСП (ITU-T рекомендация О.151)
|
Скорость передачи, |
Длина ПСП |
Конфигурация
кодера |
Спектральное
∆f, |
|
64 |
215-1 |
D15+D-14+1=0 |
1,95 |
|
2048 |
215-1 |
D15+D-14+1=0 |
62,5 |
|
8448 |
215-1 |
D15+D-14+1=0 |
257,8 |
|
34368 |
223-1 |
D23+D-18+1=0 |
4,1 |
|
139264 |
223-1 |
D23+D-18+1=0 |
16,6 |
Основным требованием,
предъявляемым к спектральному расстоянию
∆f,
является возможность успешной
синхронизации при наличии на приемной
стороне относительно узкополосной цепи
синхронизации от входящего потока. В
этом случае требуется малое расстояние
между двумя субгармониками принимаемого
сигнала. При большом расстоянии может
возникнуть джиттер регистров сдвига.
Механизм возникновения джитnера довольно
простой: длинная последовательность
нулей, характерная для ПСП большой
длины, приводит к накоплению фазовой
ошибки за время ее передачи. Такой
джиттер обусловлен алгоритмом работы
генератора ПСП, его структура зависит
от конфигурации генератора, кроме того,
джиттер регистров сдвига в общем случае
отличается по параметрам от джиттера
в цифровом канале.
Чтобы избежать
появление джиттера регистров сдвига
используются рекомендованные ПСП.
3.2 Методы
вычисления параметров ошибок в цифровых
каналах.
Параметр ошибки
по битам BER по праву считается основным
параметром тестирования любых цифровых
каналов и систем. Параметр BER связан
интегральным соотношением с функцией
распределения вероятности возникновения
ошибки в цифровом канале. Таким образом,
параметр ВЕR
является наиболее распространенной
статистической характеристикой
параметров качества работы канала. По
отношению к измеряемым величинам этот
параметр является вторичным и вычисляется
на основании данных о количестве
принимаемых ошибок в тестовой
последовательности в различные периоды
времени, поэтому необходимо говорить
о методах расчета параметра BER по данным
о количестве ошибок.
Существует несколько
алгоритмов анализа ошибок в принимаемом
потоке с ПСП. Рассмотрим, как по данным
об ошибках рассчитывается параметр
BER. На рисунке 13 представлены три основных
алгоритма такого расчета.

Рисунок 13 — Методы
измерения параметра BER
Известно, что в
процессе измерения существует две точки
синхронизации измерений: начало измерения
и время, при котором достигается заданный
порог ошибки (на рисунке -100 ошибок).
Выбор параметра ERR = 100 основан на
предположении нормального распределения
возникновения ошибок. В этом случае
относительная погрешность измерений
определяется как:
![]()
где N—
количество ошибок.
Учитывая, что для
большей части эксплуатационных измерений
относительная погрешность в 10 % является
вполне допустимой, в качестве границы
интервала синхронизации может быть
выбрано время ERR = 100. Таким образом, все
время измерений разбивается на два
интервала, от начала измерений до точки
ERR=100 и после этой точки. Соответственно
различаются три метода подсчета BER.
Первый метод
предусматривает расчет отношения ВЕR
после приема первых 100 ошибок, что
автоматически гарантирует высокую
точность измерения (лучше 10%). Однако от
начала измерения до получения результата
необходимо некоторое (иногда достаточно
большое) время.
Второй метод
предусматривает расчет отношения
непосредственно после начала измерения
без привязки к количеству принятых
ошибок по битам. В этом случае для
обеспечения точности измерений расчет
отношения делается после приема
определенного количества битов (на
рисунке — 106),
а точность измерения определяется
пороговым значением количества принятых
битов. Обычно предполагается, что
точность на порядок хуже обратного
значения количества принятых битов (на
рисунке 13 точность измерения BER = 10-5
сразу после начала расчета отношения).
В отличие от первого метода этот метод
обеспечивает определенное время начала
отображения результата измерений. С
точки зрения алгоритма проведения
эксплуатационных измерений по параметру
ошибки, многие из которых носят иногда
оценочный характер, такая методика
подсчета является наиболее эффективной
и получила наибольшее распространение.
Отрицательной стороной методики является
необходимость учета количества
переданных/принятых битов ПСП при
анализе результата, поэтому отношение
вычисляется математически без указания
точности измерений в каждый конкретный
момент. Например, если прибор показывает
BER = 10-12
при общем количестве принятых битов
108,
то необходимо констатировать — измерение
параметра BER лучше 10-7,
но не более, поскольку этим значением
ограничена точность измерения. В первом
методе такой ситуации не может возникнуть,
поскольку измерение делается заведомо
с точностью 10 % и лучше.
Наконец, третий
метод, используемый в некоторых
индикаторах, предусматривает вычисление
BER точно после приема 100 ошибочных битов.
Этот метод является модификацией первого
метода со свойственными ему негибкостью
в отображении результатов эксплуатационных
измерений и необходимостью ожидания
до индикации результата.
Таким образом,
наибольшее распространение в современной
практике получил второй метод, однако
он обычно не обеспечивает автоматического
учета точности измерений, что необходимо
при проведении эксплуатационных тестов.
Вторым наиболее
часто используемым параметром при
анализе цифровых каналов является
количество секунд, пораженных ошибками
(ES). Этот параметр является вторым по
важности после BER. Если параметр BER
определяет средний интегральный уровень
качества цифровой передачи в канале,
то параметр ES и, в особенности, обратный
к нему параметр EFS, определяют долю
общего времени, в течении которого канал
является свободным от ошибок, т.е. время,
в течении которого оператор гарантирует
бесперебойную цифровую передачу по
каналу. Таким образом, этот параметр
является крайне важным для операторов
цифровых систем передачи первичной и
вторичных сетей. Параметр ES вошел во
все основные рекомендации и нормы на
параметры цифровых каналов (например,
в рекомендации ITU-T G.821, G.826 и М.2100).
По отношению к
измеряемому параметру — количеству
принятых ошибочных битов — параметр ES
также, как и параметр BER является
вторичным. Метод его подсчета тесно
связан с определениями, даваемыми этому
параметру в европейской (одобренной
ITU-T) и американской практиках.
В европейской
практике параметр EFS определяется как
все односекундные интервалы времени,
не содержащие ошибок в течении интервала
измерений. С точки зрения методики
подсчета ES это определение означает
использование асинхронного метода
(рис. 13). Асинхронный метод предусматривает
разделение всего времени измерений на
интервалы по 1 с и подсчет количества
интервалов, в течении которых принималась
одна или несколько битовых ошибок.
В американской
практике измерений получил распространение
метод синхронного подсчета ES, согласно
которому секундой, пораженной ошибками,
называется односекундный интервал,
следующий за появлением ошибки. В
результате измерение параметра ES
синхронизируется со временем появления
ошибок.
Как видно из рисунка
14, применение двух описанных методов к
реальной ситуации дает различные
результаты. Точный анализ показывает,
что методы дают близкие результаты
только в предположении малого параметра
ES и нормальной функции распределения
вероятности возникновения ошибки. В
случае возникновения ошибок в виде
пакетов разница в параметрах, измеренных
разными методами, может достигать 18%.
Проведенные рабочими группами ITU-T
исследования показали, что большая
часть цифровых систем передачи (в
особенности радиочастотные системы
передачи с различными методами
помехозащищенного кодирования) при
работе дают именно пакетное распределение
ошибок.
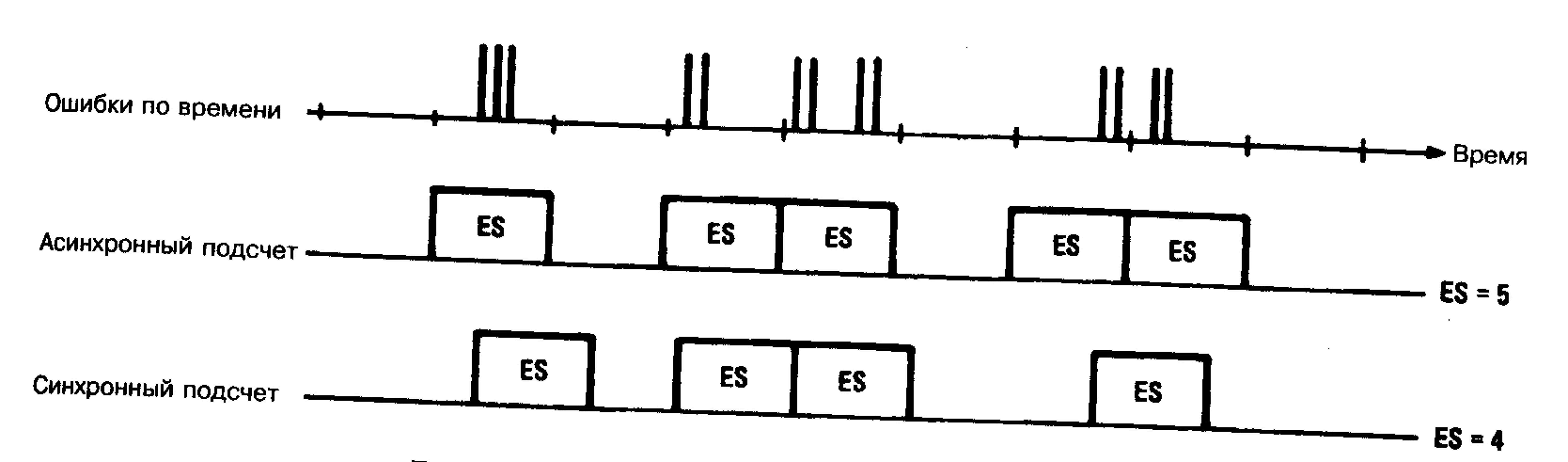
Рисунок 14 — Методы
подсчета параметра ES
Каждый метод имеет
свои преимущества и недостатки.
Преимуществом асинхронного метода
измерения является простота его
реализации в конкретных приборах, а
метода синхронного подсчета — его
инвариантность относительно выбора
времени начала измерения, что приводит
к следующим важным следствиям:
-
результаты,
измеренные разными приборами одновременно
на одном канале, точно совпадают; -
результаты,
полученные при измерениях в различных
частях цифрового канала, точно совпадают
при условии, что канал не вносит
дополнительных ошибок; -
результаты,
полученные методом синхронного подсчета,
более отражают смысл измерения ES как
общего времени негарантированной
цифровой передачи, и могут использоваться
операторами для гибкого регулирования
тарифной политики и т.д.
Таким образом,
использование метода синхронного
подсчета параметра ES представляет
оборудование систем передачи в более
выгодном свете, однако результаты таких
измерений являются инвариантными ко
времени начала теста и учитывают
возможное распределение ошибок в виде
пакетов.
Основным недостатком
синхронного метода подсчета параметра
ES является вторичное значение другого
важного параметра — EFS. Действительно в
контексте методологии синхронного
измерения ES параметр EFS невозможно
определить явно, а только как производную
параметра ES.
Для проведения
измерений без отключения цифрового
канала используются алгоритмы анализа
избыточного циклового кода. Алгоритм
такого анализа представлен на рисунке
15.
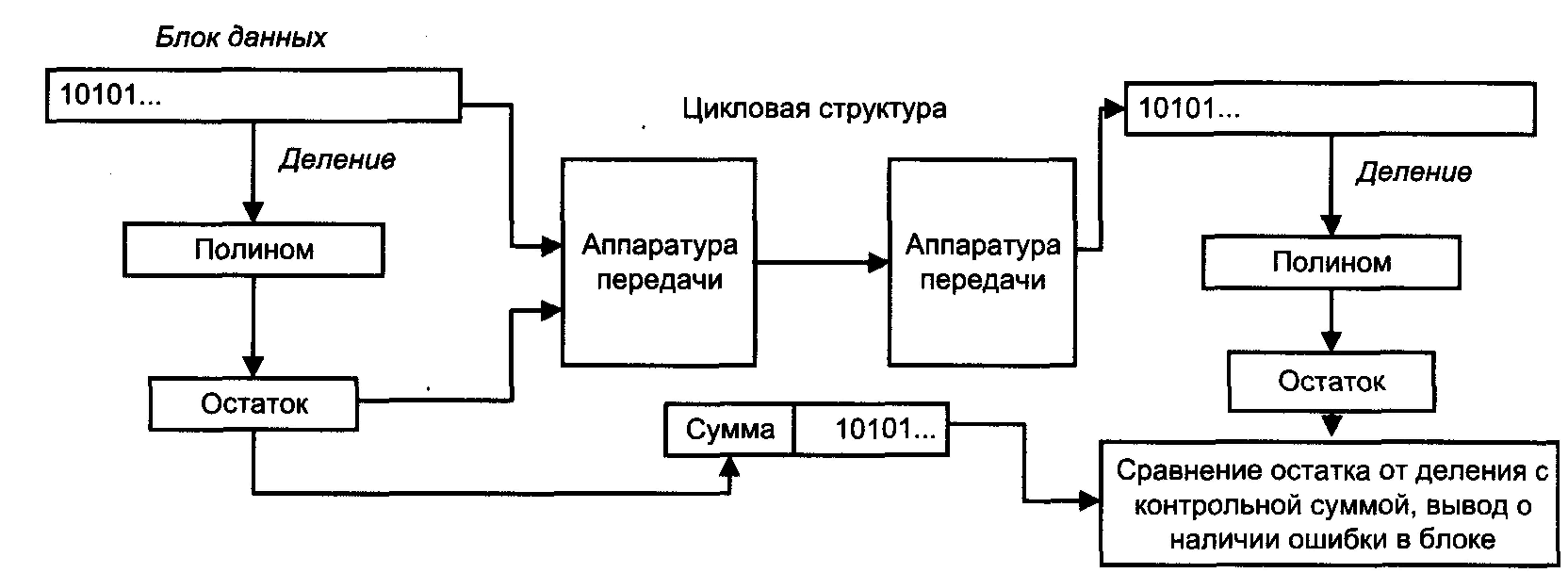
Рисунок 15 — Алгоритм
использования избыточного циклового
кода
Алгоритм использования
избыточного циклового кода следующий:
информационный поток, передаваемый
затем по цифровому каналу, разбивается
на несколько блоков данных фиксированного
размера. Для каждого блока данных
последовательность битов делится на
полином заданного вида (в зависимости
от типа кода). В результате деления
образуется остаток, передаваемый вместе
с блоком данных в составе цикла (кадра)
в канале. Процедура деления потока
данных на блоки и передача их с рассчитанным
остатком от деления приводит к
необходимости использования в аппаратуре
передачи цикловой структуры. Таким
образом, измерения параметров ошибки
без отключения канала возможны только
для систем передачи с цикловой структурой.
Остаток от деления передается в составе
цикла в виде контрольной суммы. На
приемной стороне делаются аналогичные
вычисления остатка от деления, результат
расчета сравнивается с переданной
контрольной суммой. Расхождение
результатов свидетельствует о наличии
битовой ошибки в блоке.
При такой методологии
блок анализируется в целом. В блоке
регистрируется только одна ошибка,
остальные ошибки в составе этого блока
не локализуются. Кроме того, допустима
компенсация ошибок друг другом. Как
следствие, параметры BER и CRC ERR при
измерениях могут не совпадать друг с
другом. Точность измерений без отключения
канала параметра ошибки эквивалентна
измерениям BLER и зависит не от количества
переданных битов, а от количества
переданных блоков, т.е. точность измерений
ниже.
Единственным и
главным преимуществом методики измерения
без отключения канала является возможность
измерения на реально работающем канале.
Для эксплуатационного Мониторинга
качества цифровых систем передачи
возможность таких измерений очень
важна, что и обусловило широкое
распространение этой методологии
измерений. В настоящее время именно
такие алгоритмы измерений используются
во встроенных системах самодиагностики
современных цифровых систем передачи
и во вторичных сетях передачи данных.
В зависимости от типа цикловой структуры
используются различные типы цикловых
кодов, некоторые из которых представлены
в табл. 2.
Таблица 2 — Основные
типы кодов, используемые для измерения
параметра ошибки без отключения каналов
|
Тип кода |
Полином кода |
Количество битов |
Использование |
|
CRC-6 |
Х6+Х+1 |
6 |
DS1 |
|
CRC-4 |
Х4+Х+1 |
4 |
Е1 |
|
CRC-16 |
Х16+Х12+ |
16 |
HDLC, |
|
CRC-32 |
Х32+Х26+Х23+Х22+
Х16+Х12+Х11+Х10+Х8+ |
32 |
SMDS, |
Помимо алгоритма
подсчета параметров ошибок в цифровом
канале на результаты измерений может
оказывать существенное влияние время
проведения измерений, причем как
длительность этого времени, так и выбор
времени проведения тестов по отношению
к трафику сети.
Проблемы выбора
параметров длительности проведения
тестов связаны с необходимостью
объективации результатов измерений.
Действительно, при анализе параметров
многоканальной системы передачи, в
которой для измерений задействована
лишь часть емкости, возникают два
основных вопроса: «Действительно ли
измеренные параметры соответствуют
всей системе передачи или только каналу,
в котором проводятся измерения?» и
«Будут ли сохраняться результаты
.измерений постоянными в течении суток?».
Предположим, что
в течении определенного времени
проведения измерения в цифровом канале
зарегистрировано количество N ошибок.
Для оценки достоверности измерений
обычно используется статистическая
модель со случайным возникновением
ошибок, т.е. рассчитывается коэффициент
достоверности результата как среднее
отклонение от измеренной величины.
Коэффициент достоверности позволяет
оценить реальный параметр ошибки в
предположении наихудшего варианта и
широко используется в методологии
измерений цифровых каналов.
Коэффициент битовых ошибок BER является ключевым параметром оценки качества цифровых систем передачи (ЦСП). Этот параметр незаменим при проверке цифровой аппаратуры (например, регенераторов) на этапе ее разработки и ремонта, когда оборудование выведено из эксплуатации. А что же делать, когда цифровые каналы и тракты требуется протестировать в процессе их нормальной эксплуатации?
У параметра BER есть и другой существенный недостаток: этот показатель практически невозможно использовать для оценки качества цифровой линии (скажем, для услуги IP телефонии). При заказе любой услуги связи пользователь и провайдер должны заключить соглашение о качестве обслуживания (Service Level Agreement, SLA), где четко оговариваются двусторонние обязательства. Для оценки качества сеанса связи в цифровом канале или тракте логично использовать относительное число ошибок передачи за фиксированные интервалы времени — за секунду или за период передачи фиксированной группы битов, которую называют блоком.
Именно эти показатели положены в основу двух базовых рекомендаций ITU-T — G.821 и G.826, о которых мы и поговорим ниже.
Прошло ужечетверть века с момента принятия рекомендации G.821 «Параметры ошибок международного цифрового соединения сети ISDN на скорости ниже первичной».
Первой сетью, где соединение между двумя пользователями было полностью цифровым, была сеть ISDN. Первичными скоростями ISDN являются скорости сигналов Т-1 и Е-1, равные 1544 и 2048 Кбит/c, соответственно. Ниже первичной стандартом предусматриваются скорости 64xN, где 64 Кбит/c представляет собой пропускную способность основного (или базового) цифрового канала (ОЦК), а N < 24 в случае Т-1 и N < 31 в случае Е-1.
В рекомендации G.821 в качестве параметра ошибок цифрового соединения выбраны два следующих.
- Число секунд с ошибками (Errored Second, ES), к которым относится каждая секунда, в которой имеется по крайней мере одна ошибка. Как следует из определения, при таком подходе одиночная ошибка и пакет ошибок не различаются.
- Число секунд с многочисленными ошибками (Severely Errored Second, SES), где SES означает секунду с коэффициентом ошибок ≥ 10-3.
Поскольку оба параметра — и ES, и SES — зависят от времени измерения T, для практической оценки качества цифрового соединения применяют их относительные значения: Errored Second Ratio ESR =ES/T и Severely Errored Second Ratio SESR = SES/T.
Заметим, что наличие двух параметров оценки ошибок позволяет не только более точно определить качество цифрового соединения, но и во многих случаях оказывается полезным при локализации возможных повреждений.
По мере распространения широкополосных услуг связи рамки использования рекомендации G. 821 становились все более узкими. Попытки же приспособить ее для измерения широкополосных цифровых трактов оказались неудачными. Кроме того, определение параметров качества в G.821 основывается на оценке битовых ошибок, а те, в свою очередь, могут быть точно определены лишь тогда, когда достоверно известна измеряемая цифровая последовательность. Поэтому тестирование в соответствии с G.821 возможно только при выводе цифрового соединения из эксплуатации.
Таким образом, специалисты нуждались в новой рекомендации, где учитывались бы реалии цифровых сетей связи, включая потребность тестирования канала связи в рабочем режиме, в том числе и в цифровых соединениях с применением оборудования синхронной цифровой иерархии SDH и асинхронной передачи АТМ.
Всем этим требованиям отвечает рекомендация G.826 «Параметры и нормы ошибок международных цифровых соединений на скорости выше первичной», одобренная ITU-T в 1993 г. Она обеспечила решение трех главных задач по организации тестирования ошибок цифровых соединений:
- во время нормальной эксплуатации;
- на скоростях 1544 Кбит/c, 2048 Кбит/c и выше;
- в сетях с использованием технологий SDH и АТМ.
Первая задача была решена путем перехода от тестирования ошибок по битам к тестированию ошибок по блокам. Напомним, блок представляет собой группу последовательных битов, которые относятся к исследуемому цифровому тракту. Каждый бит принадлежит к определенному блоку. Контроль блоков выполняется с помощью встроенных в системы передачи специальных устройств, применение которых гарантирует обнаружение ошибки с надежностью не ниже 90%.
Ошибки цифрового сигнала могут быть обнаружены множеством способов без перерыва связи. О недостатках двух из них — методах обнаружения ошибок кода передачи и циклового синхросигнала в цикле сигнала E-1 — мы уже упоминали. Их ограничения состоят, прежде всего, в частном характере и недостаточной точности. Между тем важнейшими требованиями к методам обнаружения ошибок цифрового сигнала являются универсальность, экономичность и точность. Универсальность означает применимость метода к любому цифровому сигналу, экономичность — эффективное использование дополнительной пропускной способности, ключевое же требование — несомненно, высокая точность.
Среди множества известных способов блочного контроля ошибок трем указанным требованиям наиболее полно удовлетворяет метод циклического контроля по избыточности (Cyclic Redundancy Code, CRC).
Метод CRC основан на делении и умножении многочленов. При этом делимый многочлен представляет собой последовательную запись блока данных в двоичной форме. Например, в системе Е-1 блок данных, для которого рассчитывается CRC, состоит из 256 байт. Поэтому делимое записывается как двоичное число длиной 2048 бит, которое по особому правилу делится на выбираемый так называемый порождающий многочлен. Полученный остаток используется в качестве контрольной информации и передается по каналу связи вместе с информационным сигналом.
Аналогичная обработка полученного блока данных выполняется на принимающей стороне, и остаток деления многочленов сравнивается с переданным остатком. Различие указанных остаточных многочленов является признаком ошибки в цифровом сигнале.
В рекомендации G.826 определены три типа блочных ошибок:
- секунда с ошибками (Errored Second, ES), содержащая хотя бы один блок с ошибками или дефект;
- секунда c многочисленными ошибками (Severely Errored Second, SES), содержащая ≥ 30% блоков с ошибками или, по крайней мере, один период с серьезными нарушениями соединения (Severely Disturbed Period, SDP);
- блок с фоновой ошибкой (Background Block Error, BBE) — блок с ошибками вне отмеченных ошибками секунд (SES).
При измерениях во время нормальной эксплуатации SDP наблюдаются, если появляются так называемые дефекты, по-разному определяемые в плезиохронных (PDH) и синхронных (SDH) системах, а также при асинхронной передаче (АТМ). К этой категории принадлежат пропадание сигнала (Loss of Signal, LOS), потеря цикловой синхронизации (Loss of Frame, LOF) или прием сигнала индикации аварийного состояния (Alarm Indication Signal, AIS). При измерениях с выводом из эксплуатации опознается SDP, если частота ошибок в течение времени тестирования составляет ≥ 10-2.
В рекомендации G.826, как и в G.821В, применяются три относительных параметра блочных ошибок:
- коэффициент секунд с блочными ошибками (Errored Second Ratio, ESR), равный отношению секунд с блочными ошибками к общему числу секунд измерения;
- коэффициент секунд с сильными блочными ошибками (Severely Errored Second Ratio, SESR), равный отношению секунд c сильными блочными ошибками к общему числу секунд измерения;
- коэффициент блоков с фоновыми ошибками (Background Block Error Ratio, BBER), равный отношению блоков с ошибками к общему числу блоков в сеансе измерения, причем при расчете BBER все блоки из интервалов с сильными ошибками исключаются.
Нужно иметь в виду, что при расчете всех трех параметров учитывается только время, в течение которого система передачи находится в состоянии готовности.
Параметр готовности цифрового соединения обязательно включается в SLA.
Система считается неготовой с того момента времени, после которого имеют место 10 последовательных секунд с сильными ошибками SES. Согласно тому же определению, система передачи вновь возвращается в состояние готовности, если по крайней мере в течение 10 последовательных секунд ошибок не наблюдается или это ошибки SES.
Нормированный показатель готовности системы представляет собой отношение времени ее готовности к общему времени работы. Реальные значения показателя надежности системы составляют 99,5%. Если в аналоговых системах передачи (АСП) мощность помех в каналах пропорциональна длине соединения, то в ЦСП существует линейная зависимость числа ошибок от длины соеди-нения. Поэтому при расчете ошибок в ЦСП, как и при расчете шумов в АСП, используется принцип гипотетической эталонной цепи (Hypothetical Reference Path, HRP).
Эталонные цепи в соответствии с рекомендациями G.821 и G.826 имеют протяженность 27 500 км и описывают распределение показателей ошибок вдоль международного цифрового соединения. Обе цепи отражают особенности нормирования показателей ошибок, утвержденные в указанных рекомендациях.
6.1. Определения коэффициента ошибок
6.2. Математическое выражение коэффициента битовых ошибок
6.3. Нормы на параметры ошибок систем передачи
6.4. Принципы построения измерителей ошибок
6.5. Техника измерения коэффициента ошибок
6.1. Определения коэффициента ошибок
Коэффициент ошибок – важнейшая характеристика линейного тракта. Он измеряется как для отдельных участков регенерации, так и для тракта в целом. Определяется коэффициент ошибок kОШ, по формуле:
kОШ = NОШ /N, (6.1)
где N – общее число символов, переданных за интервал измерения; NОШ – число ошибочно принятых символов за интервал измерения.
Измерение коэффициента ошибок носит статистический характер, так как получаемый за конечное время результат является случайной величиной. Относительную погрешность измерения в случае нормального закона распределения числа ошибок, что допустимо при N≥10, можно определить по формуле:
 . (6.2)
. (6.2)
Здесь ![]() — коэффициент, зависящий от доверительной вероятности результата измерений:
— коэффициент, зависящий от доверительной вероятности результата измерений:
![]() , (6.3)
, (6.3)
где ![]() — обратная функция интеграла вероятности
— обратная функция интеграла вероятности ![]() :
:
![]() . (6.4)
. (6.4)
Значение kОШ позволяет оценивать вероятность ошибки pОШ – количественную оценку помехоустойчивости. Область возможных значений оценки, в которой с заданной доверительной вероятностью будет находиться значение pОШ, определяется верхней (pВ) и нижней (pН) доверительными границами. При нормальном законе распределения числа ошибок значения pВ и pН определяются по формулам:
![]() , (6.5)
, (6.5)
![]() , (6.6)
, (6.6)
Очевидно, что точность оценок вероятности ошибки и коэффициента ошибки растет с увеличением N. Общее число символов цифрового сигнала, переданных за интервал измерения T, зависит от скорости передачи B: N = TB. Отсюда следует, что чем больше скорость передачи, тем быстрее и точнее можно оценить коэффициент ошибок.
6.2. Математическое выражение коэффициента битовых ошибок
Определим коэффициент битовых ошибок для реальных приёмников, которым свойственно наличие различных источников шумов. При этом будем считать, что приёмник принимает решение, какой бит (0 или 1) был передан в каждом битовом интервале путем стробирования фототока. Очевидно, что из-за наличия шумов данное решение может быть неверным, что приводит к появлению ошибочных битов. Поэтому, чтобы определить коэффициент битовых ошибок, необходимо понять, каким образом приемник принимает решение относительно переданного бита.
Обозначим через I1 и I0 фототоки, стробированные приемником в течение 1 и 0 битов, соответственно, а через s12 и s02 соответствующие шумы. Принимая, что последние имеют гауссовское распределение, проблема установления истинного значения принятого бита имеет следующую математическую формулировку. Фототок для битов 1 и 0 является выборкой гауссовской переменной со средним значением I1 и вариацией s1, а приёмник должен отслеживать этот сигнал и решать, является ли переданный бит 0 или 1. При этом существует много возможных правил принятия решения, которые могут быть реализованы в приёмнике с целью минимизации коэффициента битовых ошибок. Для значения фототока I этим оптимальным решением является наиболее вероятное значение переданного бита, которое определяется путём сравнения текущего значения фототока с пороговым значением Iп, используемым для принятия решения.
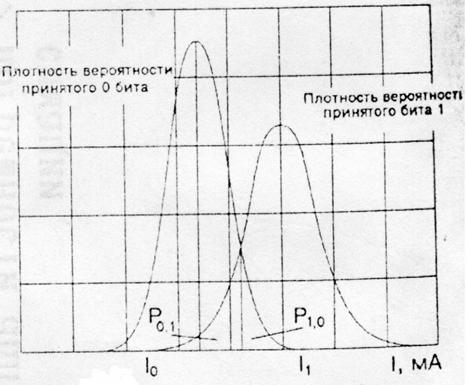
Рисунок 6.1. Функция плотности вероятности фототока принятых сигналов
Пусть при I ³ Iп принимается решение о том, что был передан бит 1, в противном случае – бит 0. Когда биты 1 и 0 равновероятны, что и рассматривается в дальнейшем, пороговый ток приблизительно равен:
![]() (6.7)
(6.7)
Геометрически Iп представляет собой значение тока I, для которого две кривые плотности вероятностей (рис. 6.1) пересекаются.
Вероятность того, что I < Iп, т. е. вероятность ошибки при передаче бита 1, обозначим через Р0,1, а вероятность решения для переданного бита 1, когда I ³ Iп при переданном 0, обозначим Р1,0.
Пусть Q(х) обозначает вероятность того, что нулевая средняя вариация гауссовской переменной превышает значение х, тогда:
 (6.8)
(6.8)
а
 (6.9)
(6.9)
а
 (6.10)
(6.10)
Можно показать [14], что BER определяется,
 (6.11)
(6.11)
Очень важно отметить, что в ряде случаев эффективным является использование изменяемого в зависимости от уровня сигнала порога принятия решения, как, например, шума оптического усилителя. Многие высокоскоростные приёмники обладают такой особенностью. Однако более простые приемники имеют порог, соответствующий среднему уровню принимаемого тока, а именно (I1 + I0)/2. Такая настройка порогового значения дает большой коэффициент битовых ошибок, определяемый выражением [14].
 (6.12)
(6.12)
Выражение (6.11) можно использовать для оценки BER, когда известны как мощность полученного сигнала, соответствующего битам 0 и 1, так и статистика шумов.
6.3. Нормы на параметры ошибок систем передачи
Битовые ошибки являются основным источником ухудшения качества связи, проявляющегося в искажении речи в телефонных каналах, недостоверности передачи информации или снижении пропускной способности передачи данных, и характеризуются статистическими параметрами и нормами на них, которые определены соответствующей вероятностью выполнения этих норм. Последние делятся на долговременные и оперативные нормы, первые из которых определяются рекомендациями ITU-T G.821 и G.826, а вторые – М.2100, М.2110 и М.2120, при этом, согласно М.2100, качество цифрового тракта по критерию ошибок делят на три категории:
- нормальное – BER < 10-6;
- пониженное – 10-6 ≤ BER < 10-3 (предаварийное состояние);
- неприемлемое – BER ≥ 10-3 (аварийное состояние).
Так как появление ошибок является следствием совокупности всех текущих условий передачи цифровых сигналов, имеющих случайный характер, то при отсутствии данных о законе распределения ошибок его отдельные элементы могут быть определены с определенной степенью достоверности только по результатам продолжительных измерений. В то же время на практике необходимо, чтобы значения параметров ошибок для ввода в эксплуатацию и технического обслуживания систем передачи основывались на достаточно коротких интервалах времени измерения. Исходя из этого, были определены следующие параметры ошибок [14]:
- секунда с ошибками (error second, ES) – односекундный интервал, содержащий хотя бы один ошибочный бит;
- секунда, пораженная ошибками (severely error second, SES) – односекундный интервал с BER ≥ 10-3.
Данные параметры ошибок должны оцениваться в течение времени готовности (available time), отсчет которого начинается с первой секунды из десяти следующих друг за другом секунд, в каждой из которых BER<10-3. ITU-T M.2100 регламентирует нормы качества (performance objectives, PO) на выраженные максимальным процентом времени параметры ошибок, которые зависят только от скорости передачи и приводятся для условного эталонного соединения (hypothetical reference connection, HRC/HRX/) длиной 27500 км. При этом нормы качества распределяются по участкам соединения соответствующей категории качества. В качестве эталонной модели такого распределения принимается участок высокой категории качества протяженностью 25000 км, которому присваивается 40% от общей нормы качества на параметры ошибок передачи точка-точка, что в пересчете на 1 км, дает 0.0016 %/км.. Остальные 4 участка (2 среднего качества и 2 с приемлемым качеством) длиной 2 х 1250 км расположены по обе стороны от центрального. Поэтому распределение, пропорциональное протяженности L км тракта высокой категории качества, будет определяться, как
AL = 0.0016 · L %/км. (6.13)
Нормы качества на цифровые тракты и каналы подразделяются на настроечные и эксплуатационные, причем вводимые в эксплуатацию впервые или после проведения корректирующих действий они должны сдаваться по настроечным нормам качества, а в процессе эксплуатации должны соответствовать эксплуатационным нормам. Обычно [105] эксплуатационная норма представляется в виде эталонной нормы качества (reference performance objective, RPO)
RPO = A · T · PO, (6.14)
а настроечная, включающая запас на старение, используемая при вводе в эксплуатацию (bringing into service objective, BISO), определяется, как половина RPO, т.е.
BISO = RPO/2. (6.15)
Здесь PO – норма качества оцениваемого параметра, а T = 86400 с (одни сутки) – продолжительность измерений (количество односекундных интервалов).
Для анализа результатов, полученных в процессе измерений, используются также предельные значения S1и S2 норм (рисунок 6.2), которые соответствуют числу событий (ES,SES) и определяются, как:
S1 = RPO/2 – D и S2 = RPO/2 + D, (6.16)
где D = 2![]() — дисперсия оцениваемого параметра.
— дисперсия оцениваемого параметра.
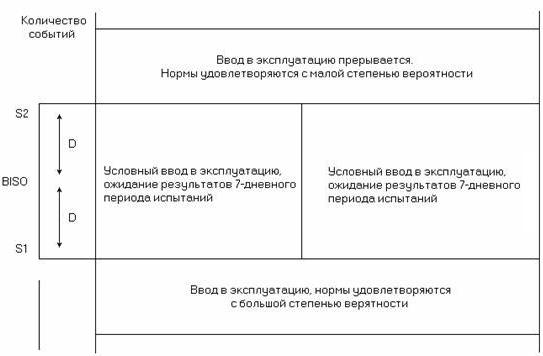
Рисунок 6.2. Предельные значения и условия ввода в эксплуатацию системы передачи
При соответствии результатов измерений норме S1 цифровой тракт может быть введен в эксплуатацию без всякого сомнения, а при превышении нормы S2 в обязательном порядке требуется повышение качества испытываемого цифрового тракта, т.е. должны быть проведены корректирующие действия с повторными измерениями. Если значение ES или SES лежит в интервале от S1 до S2, цифровой тракт может быть введен в эксплуатацию условно или временно с продолжением измерений в течение 7 суток. Данный подход к оценке качества цифровых систем передачи по параметрам ошибок позволяет сократить время измерений и получить норму цифрового тракта суммированием норм цифровых участков. При этом значения RPO, D, S1 и S2 выражаются в виде числа событий за установленный интервал времени, а не в виде процентов времени.
Для измерения коэффициента ошибок разработан ряд специальных BER анализаторов – измерителей коэффициента ошибок, включающих генераторы псевдослучайных и детерминированных последовательностей передаваемых кодированных символов, а также приемное оборудование, осуществляющее собственно измерение коэффициента ошибок. В случае посимвольного сравнения кодов измерение может быть выполнено с использованием шлейфа, т.е. путем измерения ошибок с одной оконечной станции при установке на противоположном конце шлейфа. Другой метод основан на выделении ошибок благодаря избыточности используемых кодов и используется для измерений от передающей до приемной сторон тракта или участка линии, т.е. когда выделение и фиксация ошибок производятся на ее приемном конце. Очевидно, что в первом случае требуется использование одного комплекта, а во втором – двух комплектов приборов. При этом измеренное значение коэффициента ошибок отражает качество передачи при прохождении сигнала в обоих направлениях и в каждом направлении соответственно.
6.4. Принципы построения измерителей ошибок
В зависимости от скорости передачи контролируемой системы передачи в анализаторе используются различные схемотехнические решения.
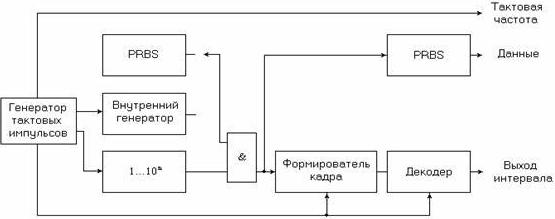
Рисунок 6.3. Генератор низкоскоростного BER анализатора
Низкоскоростной генератор тестовых кодов и детектор ошибок. Используемый в телекоммуникациях анализатор BER, состоящий [106] из генератора тестовых кодов и собственно анализатора ошибок, представлен на рисунках 6.3 и 6.4. Он предназначен для невысоких (до 200 Мбит/с) битовых скоростей, учитывая, что максимальные типовые скорости составляют 44.736 Мбит/с (DS3) в Северной Америке и 139.364 Мбит/с – за пределами Северной Америки.
PRBS с генератором кодовых групп, представленный на рис. 6.16, синхронизируется либо от источника тактового сигнала с фиксированной частотой (согласно G.703), либо от синтезатора, осуществляя тем самым изменение частоты синхронизации. В связи с этим использование данных средств требует задания некоторых определенных частот синхронизации и наличия возможности обеспечения их небольших смещений от ±15 до ±50 ppm. Для повторения тестовых кодов схема PRBS и генератор кодовых групп обычно имеют триггерную схему, управляющую либо выходным усилителем бинарных данных, который обеспечивает данные и данные с сопровождающим синхросигналом, либо выходную схему кодированных данных. Это позволяет создавать цикловую синхронизацию сигнала в соответствии с требованием, например, системы SONET/SDH. Кроме этого, данная схема способствует созданию соответствующего интерфейсного кода для эффективного восстановления тактовой синхронизации. Выходной усилитель обеспечивает необходимый уровень сигнала в соответствии со спецификацией электрического интерфейса, в том числе сигнала с чередованием полярности импульсов.
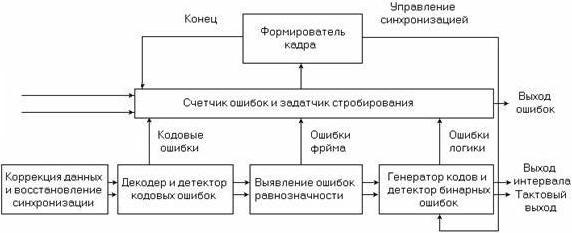
Рисунок 6.4. Низкоскоростной детектор ошибок
Детектор ошибок, показанный на рисунке 6.4, получает стандартный кодированный сигнал, восстанавливает генератор синхросигнала и устраняет кодирование для обеспечения бинарной даты и синхросигналов. Он обнаруживает любые нарушения алгоритма интерфейсного кода и посылает сигналы на счетчик ошибок, что составляет первый уровень процесса обнаружения ошибок. При работе с цикловыми сигналами приемник захватывает любой присутствующий элемент цикловой синхронизации, проверяет наличие цикловых ошибок и декодирует любые встроенные сигналы тревоги, или CRC биты, тем самым обеспечивая возможность измерения.
Наконец, бинарные данные и синхросигнал направляются на детектор ошибок и генератор эталонных тестовых кодов, которые проверяют полученный тестовый код бит за битом на предмет обнаружения логических ошибок. Временная база контролирует пропускание измерения для непрерывного, периодического и ручного режима. Накопленное количество ошибок обрабатывается для получения значения BER и анализа функционирования при наличии ошибок.
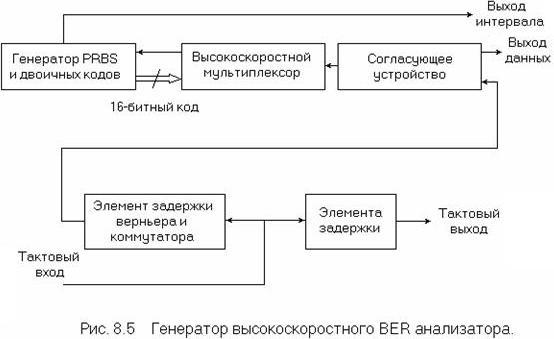
Высокоскоростной генератор тестовых кодов и детектор ошибок. На рисунках 6.5 и 6.6 показаны схемы [14] для 3 Гбит/с генератора тестовых кодов и детектора ошибок. Вследствие высокой битовой скорости генерация последовательных PRBS и кодовых групп на этой скорости не представляется целесообразной. Поэтому тестовые коды генерируются (рисунок 6.5) как параллельные 16-битные кодовые группы при максимальной скорости 200 Мбит/с, используя затем выполненные по биполярной технологии регистраторы смещения и высокоемкостную память. Высокоскоростные схемы обычно выполняются на основе арсенид-галлиевых логических схем, преобразующих параллельные данные в последовательный поток на скорости до 3 Гбит/с.
Согласно данной схеме, вход синхросигнала генерируется синтезатором частоты, согласующее устройство управляется через линию фиксированной задержки, а генератор тестовых кодов и выходной усилитель синхронизируются через схему дискретной и плавно изменяемой задержки, так что фаза синхросигнала/данных может изменяться как в положительном направлении, так и в отрицательном. Дискретные значения задержки составляют 250, 500 и 1000 пс, тогда как диапазон плавной задержки лежит в пределах от 0 до 250 пс с 1 пс инкрементом.
Корректор временной диаграммы, связанный с выходным усилителем, пересинхронизирует данные через триггер D типа для поддержания минимального фазового дрожания. Так как подобный тип тестового устройства обычно используется при проведении лабораторных измерений, выходные уровни синхросигнала и данных и постоянные смещения могут варьироваться для того или иного конкретного случая использования.
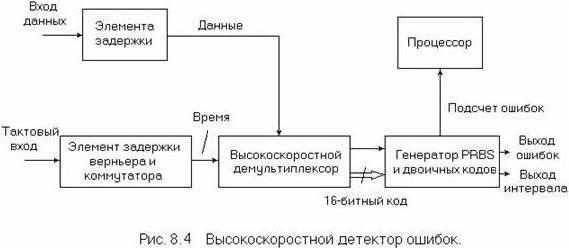
Детектор ошибок, показанный на рис. 6.6, имеет простое параллельное соединение, в связи с чем входы синхросигнала и данных проходят через схемы дискретной и плавной задержки, обеспечивая оптимальную настройку при обнаружении ошибок для любой фазы синхросигнала/данных. Действительно, путем настройки под контролем внутреннего процессора решающего порога и фазы синхросигнала условия функционирования детектора ошибок могут быть оптимизированы автоматически. Высокоскоростной демультиплексор преобразует последовательный поток данных в 16-битные параллельные кодовые группы наряду с поделенным на 16 синхросигналом. Параллельно соединенный генератор эталонных тестовых кодов синхронизируется с входными данными и осуществляет сравнение битов, поэтому любая ошибка фиксируется одним из двух счетчиков, первый из которых подсчитывает число ошибок, а второй – общее число битов. Процессор измерения обеспечивает анализ функционирования при наличии ошибок с разрешением до 1 мс.
6.5. Техника измерения коэффициента ошибок
Рассмотрим измерение коэффициента ошибок путем посимвольного сравнения и подсчета ошибочно принятых элементарных импульсов. Для этого вначале (перед измерением) на передающей станции с помощью оптического аттенюатора устанавливают заданный в технических условиях на аппаратуру линейного тракта уровень оптического излучения. Затем на передающем конце подключают генератор испытательных сигналов, а на приемном – измеритель коэффициента ошибок и, изменяя значения уровней средней мощности, измеряют коэффициент ошибок. Время измерения определяют в зависимости от скорости передачи, объема информации и значений коэффициента ошибок Кошi (BERi).
Коэффициент ошибок при заданном уровне оптического излучения вычисляют по формуле [14]
![]() (6.17)
(6.17)
где
![]() ,
,  , (6.18)
, (6.18)
где ![]() и
и ![]() — погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
— погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
3.1 Бинарный канал и методы анализа его параметров.
Рассмотрение
методологии измерений цифровых каналов
начнем с описания методов измерения
цифровых каналов с передачей информации
в простой двоичной форме (без линейного
кодирования) — бинарных цифровых каналов
(рис. 6). В современных
информационно-телекоммуникационных
системах для передачи цифровой информации
используются различные типы модуляции
и многоуровневого кодирования, однако
оконечное оборудование систем передачи
в той или иной степени использует именно
бинарный цифровой канал, поэтому
методология измерений бинарного канала
является фундаментом измерений цифровых
каналов связи. Более того, для анализа
систем с различными типами модуляции
и кодирования используются данные
методологии измерений по битам, т.е.
имитируется процесс декодирования
(демодуляции) сигнала до двоичного вида,
а затем полученный сигнал анализируется.
Таким образом, методология измерений
параметров бинарного канала представляет
собой инвариант методологии измерений
любых цифровых каналов.
Рисунок 6 — Бинарный
цифровой канал
Основное назначение
бинарного цифрового канала — это передача
цифровой информации в двоичной форме,
т.е. в виде битов, поэтому основные
параметры качества такой цифровой
передачи связаны с параметром ошибки
по битам (Bit Error Rate — BER) и его производными.
Измерения по параметру BER вошли в методики
измерений всех первичных и вторичных
сетей.
Для правильного
понимания всех нюансов измерений
цифровых каналов связи необходимо
глубокое понимание технологии измерений
бинарного цифрового канала.
Различаются два
типа измерений бинарного канала —
измерения с отключением канала и
измерения без отключения канала. При
отключении канал не используется в
процессе измерений для передачи реального
цифрового трафика. В качестве источника
и приемника двоичного сигнала используются
анализаторы цифрового канала. Измерения
без отключения канала предусматривают
использование специальных алгоритмов
анализа параметров канала в процессе
при передаче реального трафика.
При измерениях с
отключением канала сигнал передается
в виде тестовой последовательности,
которая принимается на другом конце
канала (приемник) и затем проводится
анализ ошибок, вносимых каналом.
Анализатор приемника должен обеспечивать
предсказание структуры последовательности,
т.е. требуется так называемая синхронизация
тестовой последовательности. Для
измерений используются разные тестовые
последовательности, фиксированные и
псевдослучайные, с различными алгоритмами
синхронизации тестовой последовательности.
Измерения с отключением канала — это
единственный метод анализа параметров
бинарного цифрового канала с точностью
до единичной ошибки по битам (битовая
ошибка). Это гарантируется принципом
сравнения реально принятой последовательности
битов с предсказанной, которая, в свою
очередь, точно совпадает с генерируемой
последовательностью.
Измерения без
отключения канала часто называются
мониторингом, поскольку проводятся в
режиме работающего канала, а анализатор
в этом случае подключается параллельно
и осуществляет пассивный мониторинг
канала. Алгоритм организации измерений
основан на применении различных типов
цикловых кодов или служебной информации,
передаваемой в канале. Действительно,
в реально работающем канале, с реальным
трафиком нельзя предсказать передаваемую
информацию, следовательно нельзя просто
сравнить реальную последовательность
битов с предсказанной последовательностью,
поэтому невозможно локализован единичную
битовую ошибку. Методы измерения без
отключения канала основаны на идентификации
битовой ошибки в некотором блоке
переданной информации, таким образом,
объективная точность измерения ограничена
размерами блока. Обычно две ошибки в
блоке идентифицируются как одна. В то
же время несомненное преимущество
метода — отсутствие необходимости
отключения канала — определило широкое
его распространение.
Возникновение
ошибок по битам и их влияние на параметры
цифровой передачи
В аналоговых
системах передачи канал, воздействуя
на параметры передаваемого аналогового
сигнала, снижает качественные параметры
сигнала. В цифровых системах передачи
различные воздействия на цифровой канал
приводят к снижению основного качественного
параметра — параметра ошибки. Причины
возникновения ошибок в цифровом канале
имеют аналоговую природу, поскольку
связаны с интерференцией, затуханием
в линии и различными аддитивными шумами
(рис. 7).
Рисунок 7 — Основные
источники ошибок в цифровом канале
На рисунке 7
представлены основные источники ошибок
в цифровом канале: искажения, наличие
импульсных помех, аддитивный шум в
канале и затухание в линии. Как видно,
наличие искажений в канале может быть
связано как с затуханием, так и с
отражением сигнала. Источниками шумов
выступают физически разрушенный кабель
(например, разбитая пара), слишком малое
поперечное сечение, большая распределенная
емкость в кабеле. Другим важным источником
шумов являются интерферирующие импульсы
или импульсные помехи в канале. Источниками
ошибок здесь могут быть силовые кабели,
проложенные в непосредственной близости
от линии связи, нарушение оболочки
кабелей, сигнализация по постоянному
току. Наиболее существенным и многоплановым
фактором влияния на параметры цифрового
канала является наличие аддитивных
шумов различной природы. Источниками
ошибки здесь могут быть нарушение
балансировки кабеля, параметра скручивания
витой пары, интерференция с различными
радиочастотными и СВЧ-сигналами, сигналы
вызова, нарушение полярности кабеля
(перепутанные жилы, короткое замыкание
между жилами и т.д.) Высокий уровень
шумов может привести к значительному
увеличению параметра ошибки.
Цифровые системы
передачи имеют большую по сравнению с
аналоговыми системами помехозащищенность.
Однако закономерность влияния уровня
шума на параметр ошибки справедлива
только для большого отношения сигнал/шум.
Если рассматривать влияние интерференции
на параметры цифрового канала, то эту
закономерность можно схематически
представить графиком рисунок 8. Как
видно из графика, цифровые системы
передачи имеют определенный порог
чувствительности к интерференции, в
отличие от аналоговых систем передачи,
где имеет место прямая зависимость
эффекта влияния интерференции от ее
уровня. Однако влияние интерференции
на параметры цифровых систем передачи
более существенно, и с определенного
уровня эффект этого влияния даже
превышает эффект воздействия на параметры
аналоговых систем.
Рисунок 8 — Влияние
интерференции на параметры аналоговых
и цифровых систем передачи
Наконец, важным
источником шумов в цифровых каналах
является затухание в кабелях и линиях
передачи, причем не только высокий
уровень затухания, но и его неравномерная
характеристика приводят к появлению
субгармоник, вносящих дополнительный
аддитивный шум.
Если рассматривать
источники ошибок не только в канале, но
и в цифровой системе передачи, то можно
выделить внутренние и внешние источники.
К внутренним
источникам ошибок относятся:
-
различная
нестабильность во внутренних цепях
синхронизации цифровых устройств,
дрейф в системе внутренней синхронизации
устройства; -
нестабильность,
связанная с измерением характеристик
электронных компонентов в составе
устройства; -
перекрестные
помехи в цепях устройств; -
нарушения в работе
эквалайзеров и в процессах, связанных
с неравномерностью АЧХ; -
повышение порога
по шуму, связанное с изменением параметров
модулей устройств со временем.
К внешним источникам
ошибок можно отнести:
-
перекрестные
помехи в каналах передачи; -
джиттер в системе
передачи; -
электромагнитная
интерференция (от машин, флуорисцентных
ламп и т.д.); -
нестабильность
источников питания устройств; -
импульсные шумы
в канале; -
механические
повреждения, воздействие вибрации,
плохие контакты; -
деградация
качественных параметров среды передачи
(электрического или оптического кабеля,
радиочастотного канала и т.д.); -
глобальные
нарушения, связанные с разрушением
канала цифровой передачи.
Влияние всех
перечисленных источников ошибок и
интерференции значительно повышается
при снижении параметра отношения
сигнал/шум
Если рассмотреть
влияние интерференции на параметры
качества работы цифровой системы
передачи, можно отметить, что влияние
битовых ошибок отличается для различных
услуг и систем передач в зависимости
от следующих факторов:
-
типа передаваемого
трафика (голос, данные, видео, мультимедиа
и т.д.); -
типа системы
передачи, принципов кодирования и
наличия цепей резервирования передачи
сигнала; -
количества и
частоты битовых ошибок; -
распределения
битовых ошибок (равномерно распределенные
ошибки, ошибки, возникающие пакетами
и т.д.); -
источника
интерференции; -
устойчивости
принятого в системе передачи принципа
передачи цифровой информации к ошибкам; -
устойчивости
принятого в системе передачи принципа
передачи цифровой информации к другим
факторам воздействия (джиттеру,
нестабильности синхронизации и т.д.»)
Основные параметры,
измеряемые в бинарном цифровом канале
Все параметры,
измеряемые в бинарном цифровом канале,
будут встречаться в технологии измерений
цифровых каналов первичной и вторичных
цифровых сетей. Прежде чем рассматривать
технологию измерений параметров
бинарного цифрового канала, необходимо
определить эти параметры. Ниже приведены
основные параметры, измеряемые в бинарном
цифровом канале. Они описаны в соответствии
с сокращениями, используемыми в меню
большинства приборов. В основном это
параметры, используемые для анализа
характеристик бинарного канала согласно
ITU-T рекомендации G.821, G.826 и М.2100.
AS — Availability Seconds —
время готовности канала (с) — вторичный
параметр, равный разности между общей
длительностью теста и временем
неготовности канала.
AS(%) — Availability Seconds —
относительное время готовности канала
— параметр, характеризующий готовность
канала, выраженный в процентах, является
первичным параметром и входит в число
основных параметров ITU-T рекомендации
G.821. Его можно интерпретировать как
вероятностную меру качества предоставляемого
пользователю канала.
ВВЕ — Background Block
Error — блок с фоновой ошибкой — блок с
ошибками не является частью SES, применяется
при анализе ошибок по блокам. Важный
параметр, вошедший в рекомендации ITU-T
G.826.
BIT
или ERR
BIT
— Bit
Errors
— число ошибочных битов — параметр,
используемый при анализе канала на
наличие битовых ошибок и являющийся
числителем в выражении для расчета BER.
Битовые ошибки подсчитываются только
в период пребывания канала в состоянии
готовности.
ЕВ — Error
Block
— число ошибочных блоков — параметр,
используемый при анализе каиала на
наличие блоковых ошибок и являющийся
числителем в выражении для расчета
BLER.
Блоковые ошибки подсчитываются только
в период пребывания канала в состоянии
готовности.
BBER
— Background
Block
Error
Rate
— коэффициент ошибок по блокам с фоновыми
Ошибками — отношение числа блоков с
фоновыми ошибками ко всему количеству
блоков в течение времени готовности
канала за исключением всех блоков в
течении SES.
Параметр входит в рекомендации ITU-T
G.826.
RATE
или BER
— Bit
Error
Rate
— частота битовых ошибок, коэффициент
ошибок по битам — основной параметр в
системах цифровой передачи, равный
отношению числа битовых ошибок к общему
числу бит, переданных за время проведения
теста по каналу, находящемуся в состоянии
готовности. При обнаружении десяти
последовательных секундных интервалов,
сильно пораженных ошибками (SES),
анализатор ИКМ переключается на подсчет
времени неготовности канала. При этом
измерение BER
прерывается до восстановления
работоспособности канала. Таким образом,
управляемые проскальзывания, связанные
с потерей одного или нескольких циклов
информации, практически не влияют на
значение BER.
Измерения параметра BER
универсальны, они не требуют наличия в
потоке Е1 цикловой и сверхцикловой
структуры, однако необходима передача
специальной тестовой последовательности.
Проводятся только при полном или
частичном отключении цифрового канала
от полезной нагрузки.
BLER
— Block
Error
Rate
— частота блоковых ошибок, коэффициент
ошибок по блокам — редко применяемый на
практике параметр, равный отношению
числа ошибочных блоков данных к общему
числу переданных блоков. Под блоком
понимается заданное количество битов.
Ошибочным блоком считается блок,
содержащий хотя бы один ошибочный бит.
Обычно значение параметра BLER
больше (хуже), чем параметра BER.
Его целесообразно измерять только в
тех сетях передачи данных, где информация
передается блоками фиксированного
размера, а параметр BLER
является важной характеристикой канала
с учетом кадровой (цикловой) структуры
передачи. Например, для сетей ATM
принята кадровая структура передачи в
виде кадров длиной 53 бита. Ошибочный
кадр уничтожается (дискартируется). В
этом случае можно считать кадр ATM
блоком длиной в 53 бита, а эквивалентом
BLER
будет параметр ошибки по кадрам CER
(Cell
Error
Rate).
В другом примере в качестве эквивалента
блока может выступать сверхцикл ИКМ, а
эквивалентом BLER
будет ошибка по CRC.
CLKSLIP
или SLIP
— Clock
Slips
— число тактовых проскальзываний —
параметр характеризуется числом
синхронных управляемых проскальзываний,
появившихся с момента начала теста.
Проскальзыванием называется повторение
или исключение группы символов в
синхронной или плезиохронной
последовательности двоичных символов
в результате различия между скоростями
считывания и записи в буферной памяти.
Поскольку проскальзывание ведет к
потере части информации, что в свою
очередь ведет к потере цикловой
синхронизации, на практике используются
эластичные управляемые буферы с
возможностью управления проскальзываниями.
В этом случае проскальзывания называются
управляемыми. В наибольшей степени
параметр CLKSLIP
связан с параметром неготовности канала
(UAS).
Сопоставление CLKSLIP
и UAS
позволяет выявить причину неготовности
канала, в частности, связана ли она с
нарушением синхронизации. Значение
параметра CLKSLIP
зависит от размера имитируемого прибором
буфера, емкостью от 1 бита до нескольких
циклов.
CRC
ERR
— CRC
Errors
— число ошибок CRC
— параметр ошибки, измеренный с
использованием циклового избыточного
кода (CRC),
распространенный параметр определения
ошибок реально работающего канала без
его отключения и без передачи тестовой
последовательности. Данные кода
помещаются в состав сверхцикла ИКМ,
Необходимым условием измерения параметра
CRC
является наличие механизма формирования
кода в аппаратуре передачи. Встроенные
средства самодиагностики большей части
современных цифровых систем передачи
используют именно этот механизм. Таким
образом, при измерении параметра CRC
можно не только оценить частоту ошибок,
но в проверить работу системы
самодиагностики.
При использования
CRC
часто возникает вопрос о необходимости
одновременного измерения и параметра
BER.
Необходимо учитывать две особенности
применения CRC.
Во-первых, каждая ошибка CRC
не обязательно связана с ошибкой одного
бита информации. Несколько битовых
ошибок в одном сверхцикле могут дать
только одну ошибку CRC
для блока Во-вторых, несколько битовых
ошибок могут компенсировать друг друга
и не входить в суммарную оценку CRC.
Таким образом, при использовании CRC
можно говорить не об истинном уровне
ошибок в канале, а только об оценке их
величины. Тем не менее CRC
является удобным методом контроля
ошибок при проведении сервисного
наблюдения за работающим каналом, когда
практически невозможно измерить реальные
параметры битовых ошибок.
CRC
RATE
— CRC
Errors
Rate
— частота ошибок CRC
— показывает среднюю частоту ошибок
CRC.
По описанным выше причинам бывает лишь
частично коррелирован с параметром
BER.
DGRM
— Degraded
Minutes
— число минут деградации качества —
несколько временных интервалов
продолжительностью 60 с каждый, когда
канал находится в состоянии готовности,
но BER=10″‘.
Ошибки во время неготовности канала не
считаются, а интервалы по 60 с в состоянии
готовности канала, пораженные ошибками
несколько раз, суммируются.
DGRM
(%) — Degraded
Minutes
— процент минут деградации качества —
число минут деградации качества,
выраженное в процентах по отношению ко
времени, прошедшему с момента начала
тестирования.
EFS
— Error
Free
Seconds
— время, свободное от ошибок (с), — один
из первостепенных параметров, входящих
в рекомендации G.821
и М.2100/М.550. Отражает время, в течение
которого сигнал был правильно
синхронизирован, а ошибки отсутствовали,
т.е. общее время пребывания канала в
состоянии готовности.
EFS(%)
— Error
Free
Seconds
— процент времени, свободного от ошибок
(с), — то же, что и предыдущий параметр,
только выраженный в процентах по
отношению к общему времени с момента
начала тестирования.
ES
— Errors
Seconds
— длительность поражения сигнала
ошибками, количество секунд с ошибками
(с) — параметр показывает интервал
времени поражения всеми видами ошибок
в канале, находящемся в состоянии
готовности. ES
связан с другими параметрами простым
соотношением: AS
= ES
+ EFS.
ES(%)
— Errors
Seconds
— процент поражения сигнала ошибками
— параметр связан с %EFS
соотношением: %ES
+ %EFS
= %AS.
ESR
— Error
Seconds
Rate
— коэффициент ошибок по секундам с
ошибками — параметр, практически равный
ES(%).
LOSS
— Loss
of
Signal
Seconds
— длительность потери сигнала (с) —
параметр характеризует интервал времени,
в течение которого сигнал был потерян.
PATL
— Pattern
Loss
— количество потерь тестовой
последовательности — параметр
характеризуется числом потерь тестовой
последовательности, появившихся с
момента начала теста.
PATLS
— Pattern
Loss
Seconds
— продолжительность времени потери
тестовой последовательности — общее
время потери тестовой последовательности
с момента начала теста.
SES — Severally Errors Seconds
— продолжительность многократного
поражения ошибками, количество секунд,
пораженных ошибками (с), — интервал
времени, пораженный ошибками несколько
раз, измеряемый в секундах. В это время
частота битовых ошибок составляет
BER>10-3. Подсчет SES производится только
во время готовности канала. Из определения
видно, что SES — составная часть параметра
ES. Вторая интерпретация параметра SES
связана с измерениями по блоковым
ошибкам, тогда SES определяется как
односекунд-ный интервал времени,
содержащий более 30 % блоков с ошибками.
Можно сказать, что во время подсчета
параметра SES, качество канала чрезвычайно
плохое. Параметр SES очень важен и входит
в перечень обязательных к измерению
параметров ИКМ рекомендаций G.821 и
М..2100/М.550.
SES(%) — Severally Errors
Seconds — относительная продолжительность
многократного поражения ошибками — тот
же параметр, выраженный в процентах.
SESR — Severally Error Seconds
Rate — коэффициент ошибок по секундам,
пораженным ошибками — параметр, практически
равный SES(%).
SLIPS или CKSLIPS — Clock
Slips Seconds — продолжительность тактовых
проскальзываний — параметр характеризуется
общим временем с наличием синхронных
управляемых проскальзываний.
UAS — Unavailability Seconds —
время неготовности канала (с) — время
неготовности канала начинает отсчитываться
с момента обнаружения 10 последовательных
интервалов SES и увеличивается после
каждых следующих 10 последовательных
интервалов SES. Счет UAS обычно начинается
с момента потери цикловой синхронизации
или сигнала. Этот параметр связан со
всеми предыдущими параметрами и
определяет стабильность работы цифрового
канала.
UAS(%) — Unavailability
Seconds — относительное время неготовности
канала — предыдущий параметр, выраженный
в процентах.
Тестовые
последовательности
Для организации
измерений с отключением канала
используются генератор и анализатор
тестовой последовательности, подключенные
к разным концам цифрового канала. Эти
приборы синхронизированы по тестовой
последовательности, т.е. анализатор
может предсказать следующее значение
каждого принимаемого бита.
В практике
используются два типа тестовых
последовательностей — фиксированные и
псевдослучайные (ПСП, PRBS — Pseudorandom Binary
Sequence). Фиксированными являются
последовательности чередующихся
повторяемых комбинаций битов. В качестве
примера рассмотрим альтернативную
фиксированную последовательность типа
1010, в которой после каждого 0 идет 1.
Процедура синхронизации тестовой
последовательности в этом случае может
быть чрезвычайно проста: анализатор
заранее запрограммирован на ожидание
альтернативной последовательности.
При приеме 1 он предсказывает появление
в качестве следующего бита 0, и в случае
приема 1 делается вывод о битовой ошибки.
Реальная процедура синхронизации
несколько сложнее, поскольку требуется
проверка, не является ли первый принятый
бит ошибочным. Для этого проверяется
правильность синхронизации в течение
нескольких последовательных групп
битов (блоков), при этом сама процедура
синхронизации аналогична. Такая процедура
синхронизации не указывает на начало
цикла.
При фиксированной
тестовой последовательности с указанием
начала цикла, начало цикла задается
специальным битом или последовательностью
битов (далее называется бит f).
В практике могут
использоваться обе процедуры синхронизации
тестовой последовательности. В последнее
время производители склоняются к
внедрению процедуры с указанием начала
цикла, поскольку в этом случае синхронизация
тестовой последовательности осуществляется
в течении нескольких циклов — порядка
8-16 переданных битов. Исключение составляют
постоянные фиксированные последовательности
0000 и 1111, где процедура с указанием начала
цикла не имеет смысла.
В современной
практике используются следующие
фиксированные тестовые последовательности:
1111 — все единицы —
фиксированная последовательность
используется обычно для расширенного
и стрессового тестирования канала.
Например, если последовательность
послана в неструктурированном потоке
Е1, то это будет понято как сигнал
неисправности (AIS).
1010 — альтернативная
— фиксированная последовательность из
чередующихся нулей и единиц.
Последовательность может передаваться
без указания или с указанием начала
цикла -f 0101 0101.
0000 — все нули —
фиксированная последовательность
используется обычно для расширенного
и стрессового тестирования канала.
FOX — фиксированная
последовательность FOX используется в
приложениях передачи данных.
Последовательность в ASCII переводится
как «Quick brown fox.». Синхронизация
последовательности осуществляется
правильным переводом предложения. Ниже
приведена последовательность:
2А, 12, А2, 04, 8А, АА,
92, С2, D2, 04, 42, 4А, F2, ЕА, 72, 04, 62, F2, 1А, 04, 52, АА,
В2, ОА, СА, 04, F2, 6А, А2, 4А, 04, 2А, 12, А2, 04, 32, 82,
5А, 9А, 04, 22, F2, Е2, 04, 8С, 4С, СС, 2С, АС, 6С, ЕС,
1C, 9С, ОС, ВО, 50
1-3 — одна единица
на три бита — промышленный стандарт 1 в
3 последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 010.
1-4 — одна единица
на три бита — промышленный стандарт 1 в
4 последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 0100.
1-8 — одна единица
на восемь битов — промышленный стандарт
1 в 8 последовательностях используется
для расширенного и стрессового
тестирования канала. Последовательность
передается с указанием на начало цикла:
f 0100 0000.
3-24 — три единицы
на 24 бита — промышленный стандарт 3 в 24
последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 0100 0100 0000
0000 0000 0100.
Кроме перечисленных
стандартных фиксированных последовательностей
могут использоваться произвольные
слова и предложения. Процедура
синхронизации и анализа битовых ошибок
может быть организована на основе
указания на начало цикла или на основе
проверки правильности перевода слов и
предложений. Вторая процедура наиболее
часто используется в практике.
Использование
фиксированных последовательностей
рекомендовано главным образом для
стрессового тестирования аппаратуры
кодирования/декодирования. Поэтому
наиболее часто используются тестовые
последовательности со множеством нулей.
Как известно, при передаче двоичной
последовательности наличие
последовательности из нескольких нулей
равносильно отсутствию сигнала (0 обычно
передается сигналом нулевой амплитуды).
В результате генерации последовательностей
со множеством нулей можно проанализировать
работу канала в случае естественного
пропадания сигнала.
Например, в
системах ИКМ (поток Е1) в недавнем прошлом
использовался линейный код AMI, в котором
от-сутствуem устойчивость битовой
синхронизации при появлении длинных
последовательностей нулей. В результате
необходим анализ частоты сбоев битовой
синхронизации измеряемого канала с
кодированием AMI. Для измерений обычно
используются промышленные стандарты
с длинными последовательностями нулей
— 1-4, 1-8 или 3-24. Длинная последовательность
нулей в этом случае создает возможность
сбоя битовой синхронизации, фиксируемого
как битовые ошибки при передачи единиц.
Неустойчивость
битовой синхронизации в случае появления
длинных последовательностей нулей
кодирования AMI было преодолено в
современном коде HDB3 ИКМ-систем, где
используется процедура инверсии шестого
нуля в алгоритме кодирования.
Работоспособность этой процедуры можно
проверить при помощи промышленных
стандартов с длинными последовательностями
нулей — 1-4, 1-8 или 3-24. Кроме того, стабильность
битовой синхронизации может быть
проверена генерацией последовательности
0000.
Вторым направлением
стрессового тестирования является
анализ систем передачи с заполнением.
Например, в некоторых
ИКМ-системах при организации транзита
сбой на удаленном конце приводит к тому,
что поток Е1 заполняется единицами. Эта
процедура используется для имитации
сбоя: передатчик генерирует
последовательность 1111 и анализирует
сигнал AIS, передаваемый принимающей
стороной.
Наличие систем с
заполнением требует с особенной
осторожностью использовать при измерениях
фиксированные последовательности. В
некоторых случаях фиксированная
последовательность может совпадать с
последовательностью заполнения, что
может привести к ошибочным результатам.
Известен случай
анализа спутникового канала по параметру
ошибки (ВЕR), при этом использовалась
альтернативная последовательность
1010, которая совпала с последовательностью
заполнения выходного канала передачи
данных от модема. В результате даже
после пропадания радиочастотного
спутникового канала анализатор выдавал
результат по параметру ошибки BER=10-5
Чтобы избежать
подобных ситуаций, рекомендуется
использовать фиксированные
последовательности в виде слов или
предложений (например, применение
последовательности FOX в описываемом
примере сразу идентифицировало
неготовность канала) или псевдослучайной
последовательности (ПСП).
Псевдослучайные
последовательности характеризуются
количеством регистров сдвига, используемых
при генерации N с длинной цикла
последовательности L=2N
— 1. Структура псевдослучайной
последовательности связана со схемой
генератора ПСП, представленной на
рисунке 9.
Рисунок 9 — Генератор
псевдослучайной последовательности
В основе принципа
работы генератора ПСП лежит процедура
сверточного кодирования с использованием
N регистров сдвига с одной обратной
связью перед регистром N. Это экви
валентно кодеру сверточного кодирования
с полиномом Dn+Dn+1+l.
Соответственно длина кодированной
последовательности зависит от количества
регистров сдвига и составляет 2N-L
Процедура предусматривает циклическое
повторение последовательности через
2N-1
тактовых импульсов (эквивалентно,
битов). Большее количество регистров
определяет меньшую повторяемость
последовательности.
Для анализа
принимаемой ПСП используются два типа
анализаторов, схемы которых представлены
на рис. 6.5 и 6.6. Наиболее часто используется
метод анализа ПСП с обратной связью
(рис. 10). В этом случае последовательность
синхронизируется следующим образом:
петля обратной связи размыкается, данные
загружаются в регистры сдвига до полного
заполнения, затем петля обратной связи
замыкается и производится синхронизация
по тестовой последовательности. Две
несинхронные ПСП имеют относительный
параметр BER приблизительно равный 0,5,
таким образом, для достижения синхронизации
по тестовой последовательности критерий
синхронизации выбирается ниже этого
значения.
Рисунок 10 — Анализатор
ПСП с замкнутой обратной связью, метод
побитового измерения ошибок
Рисунок 11 — Анализатор
ПСП без обратной связи
Вторым методом
построения анализатора ПСП является
метод без обратной связи (рис. 11). Этот
метод в настоящее время практически не
используется и признан устаревшим.
Основным недостатком его является
наличие процессов подавления данных
при измерениях каналов с высоким
параметром ошибки. Метод был разработан
для низкого параметра ошибки в
предположении, что сами ошибки возникают
случайным образом и описываются
нормальным распределением.
Современные системы
передачи используют алгоритмы кодирования
и принципы передачи, приводящие к
появлению всплесков ошибок, возникающих
в виде пакетов. В этом случае алгоритм
анализа без обратной связи характеризует
нестабильную работу.
В дальнейшем при
описании анализа ПСП будем исходить из
принципов анализа с обратной связью.
В современной
практике используются следующие типы
псевдослучайных последовательностей:
2е23 — стандартная
2е23-1
псевдослучайная последовательность
битов. Сигнал формируется из 23-фазного
регистра сдвига без ограничения нулей.
Эта последовательность соответствует
техническому стандарту ITU 0.151. Получила
распространение для тестирования
высокоскоростных цифровых каналов
первичной сети (например, каналов SDH).
2е20 — стандартная
2е20-1
псевдослучайная последовательность
битов. Сигнал формируется из 20-фазного
регистра сдвига без ограничения нулей.
Эта последовательность соответствует
техническому стандарту ITU 0.151.
2е15 — стандартная
2е15-1
псевдослучайная последовательность
бит. Сигнал формируется из 15-фазного
регистра сдвига без ограничения нулей.
Последовательность может содержать до
14 нулей в строке. Последовательность
получила наиболее широкое распространение
для анализа каналов PDH с относительно
невысокой скоростью передачи.
20ITU — стандартная
2е20-1
псевдослучайная последовательность
бит. Сигнал формируется из 20-фазного
регистра сдвига без ограничения нулей.
Последовательность соответствует
техническому стандарту ITU 0.153. Однако,
эта последовательность отличается от
2е20 последовательности, потому что
используются разные механизмы обратной
связи. 20ITU подавляет последовательности
из более чем 18 нулей, в отличие от 14 нулей
в 2е20.
2047 — короткая ПСП.
Сигнал формируется из 11 -фазного регистра
сдвига без ограничения нулей. Стандартный
2047-битный код используется для анализа
вторичных сетей передачи данных,
приложений DDS и ISDN.
511 — короткая ПСП.
Сигнал формируется из 9-фазного регистра
сдвига без ограничения нулей. Стандартный
511-битный код применяется для анализа
вторичных сетей передачи данных, в
частности он соответствует техническому
стандарту ITU V.52.
127 — короткая ПСП.
Сигнал формируется из 7-фазного регистра
сдвига без ограничения нулей. Стандартный
127-битный код используется для анализа
низкоскоростных каналов передачи данных
(например, модемных каналов).
63 — самая короткая
ПСП, применяемая в практике измерений.
Сигнал формируется из 6-фазного регистра
сдвига без ограничения нулей. Стандартный
63-битный код применяется для анализа
низкоскоростных каналов передачи данных
(например, модемных каналов).
Таким образом,
основными характеристиками ПСП являются:
-
длина последовательности
в битах; -
вид полинома,
соответствующая конфигурация регистров
генератора и анализатора ПСП; -
спектральный
состав сигнала, зависящий от скорости
передачи в канале.
Спектральный
состав псевдослучайной последовательности
схематически представлен на рис. 6.7.
В зависимости от
скорости передачи данных в канале
используются ПСП различной длины: чем
больше скорость, тем большая длина
последовательности допускается.
Рекомендация ITU-T 0.151 определяет значения
используемых длин ПСП в зависимости от
скорости цифровой передачи в канале
согласно таблице 1. Кроме того существует
также рекомендация по выбору тестовой
последовательности для канала 64 кбит/с
— 211-1,
приведенная в ITU-T рекомендация 0.152.
Рисунок 12 —
Спектральный состав ПСП с кодированием
NRZ
Таблица
1 — Длины тестовых последовательностей
ПСП (ITU-T рекомендация О.151)
|
Скорость передачи, |
Длина ПСП |
Конфигурация
кодера |
Спектральное
∆f, |
|
64 |
215-1 |
D15+D-14+1=0 |
1,95 |
|
2048 |
215-1 |
D15+D-14+1=0 |
62,5 |
|
8448 |
215-1 |
D15+D-14+1=0 |
257,8 |
|
34368 |
223-1 |
D23+D-18+1=0 |
4,1 |
|
139264 |
223-1 |
D23+D-18+1=0 |
16,6 |
Основным требованием,
предъявляемым к спектральному расстоянию
∆f,
является возможность успешной
синхронизации при наличии на приемной
стороне относительно узкополосной цепи
синхронизации от входящего потока. В
этом случае требуется малое расстояние
между двумя субгармониками принимаемого
сигнала. При большом расстоянии может
возникнуть джиттер регистров сдвига.
Механизм возникновения джитnера довольно
простой: длинная последовательность
нулей, характерная для ПСП большой
длины, приводит к накоплению фазовой
ошибки за время ее передачи. Такой
джиттер обусловлен алгоритмом работы
генератора ПСП, его структура зависит
от конфигурации генератора, кроме того,
джиттер регистров сдвига в общем случае
отличается по параметрам от джиттера
в цифровом канале.
Чтобы избежать
появление джиттера регистров сдвига
используются рекомендованные ПСП.
3.2 Методы
вычисления параметров ошибок в цифровых
каналах.
Параметр ошибки
по битам BER по праву считается основным
параметром тестирования любых цифровых
каналов и систем. Параметр BER связан
интегральным соотношением с функцией
распределения вероятности возникновения
ошибки в цифровом канале. Таким образом,
параметр ВЕR
является наиболее распространенной
статистической характеристикой
параметров качества работы канала. По
отношению к измеряемым величинам этот
параметр является вторичным и вычисляется
на основании данных о количестве
принимаемых ошибок в тестовой
последовательности в различные периоды
времени, поэтому необходимо говорить
о методах расчета параметра BER по данным
о количестве ошибок.
Существует несколько
алгоритмов анализа ошибок в принимаемом
потоке с ПСП. Рассмотрим, как по данным
об ошибках рассчитывается параметр
BER. На рисунке 13 представлены три основных
алгоритма такого расчета.
Рисунок 13 — Методы
измерения параметра BER
Известно, что в
процессе измерения существует две точки
синхронизации измерений: начало измерения
и время, при котором достигается заданный
порог ошибки (на рисунке -100 ошибок).
Выбор параметра ERR = 100 основан на
предположении нормального распределения
возникновения ошибок. В этом случае
относительная погрешность измерений
определяется как:
![]()
где N—
количество ошибок.
Учитывая, что для
большей части эксплуатационных измерений
относительная погрешность в 10 % является
вполне допустимой, в качестве границы
интервала синхронизации может быть
выбрано время ERR = 100. Таким образом, все
время измерений разбивается на два
интервала, от начала измерений до точки
ERR=100 и после этой точки. Соответственно
различаются три метода подсчета BER.
Первый метод
предусматривает расчет отношения ВЕR
после приема первых 100 ошибок, что
автоматически гарантирует высокую
точность измерения (лучше 10%). Однако от
начала измерения до получения результата
необходимо некоторое (иногда достаточно
большое) время.
Второй метод
предусматривает расчет отношения
непосредственно после начала измерения
без привязки к количеству принятых
ошибок по битам. В этом случае для
обеспечения точности измерений расчет
отношения делается после приема
определенного количества битов (на
рисунке — 106),
а точность измерения определяется
пороговым значением количества принятых
битов. Обычно предполагается, что
точность на порядок хуже обратного
значения количества принятых битов (на
рисунке 13 точность измерения BER = 10-5
сразу после начала расчета отношения).
В отличие от первого метода этот метод
обеспечивает определенное время начала
отображения результата измерений. С
точки зрения алгоритма проведения
эксплуатационных измерений по параметру
ошибки, многие из которых носят иногда
оценочный характер, такая методика
подсчета является наиболее эффективной
и получила наибольшее распространение.
Отрицательной стороной методики является
необходимость учета количества
переданных/принятых битов ПСП при
анализе результата, поэтому отношение
вычисляется математически без указания
точности измерений в каждый конкретный
момент. Например, если прибор показывает
BER = 10-12
при общем количестве принятых битов
108,
то необходимо констатировать — измерение
параметра BER лучше 10-7,
но не более, поскольку этим значением
ограничена точность измерения. В первом
методе такой ситуации не может возникнуть,
поскольку измерение делается заведомо
с точностью 10 % и лучше.
Наконец, третий
метод, используемый в некоторых
индикаторах, предусматривает вычисление
BER точно после приема 100 ошибочных битов.
Этот метод является модификацией первого
метода со свойственными ему негибкостью
в отображении результатов эксплуатационных
измерений и необходимостью ожидания
до индикации результата.
Таким образом,
наибольшее распространение в современной
практике получил второй метод, однако
он обычно не обеспечивает автоматического
учета точности измерений, что необходимо
при проведении эксплуатационных тестов.
Вторым наиболее
часто используемым параметром при
анализе цифровых каналов является
количество секунд, пораженных ошибками
(ES). Этот параметр является вторым по
важности после BER. Если параметр BER
определяет средний интегральный уровень
качества цифровой передачи в канале,
то параметр ES и, в особенности, обратный
к нему параметр EFS, определяют долю
общего времени, в течении которого канал
является свободным от ошибок, т.е. время,
в течении которого оператор гарантирует
бесперебойную цифровую передачу по
каналу. Таким образом, этот параметр
является крайне важным для операторов
цифровых систем передачи первичной и
вторичных сетей. Параметр ES вошел во
все основные рекомендации и нормы на
параметры цифровых каналов (например,
в рекомендации ITU-T G.821, G.826 и М.2100).
По отношению к
измеряемому параметру — количеству
принятых ошибочных битов — параметр ES
также, как и параметр BER является
вторичным. Метод его подсчета тесно
связан с определениями, даваемыми этому
параметру в европейской (одобренной
ITU-T) и американской практиках.
В европейской
практике параметр EFS определяется как
все односекундные интервалы времени,
не содержащие ошибок в течении интервала
измерений. С точки зрения методики
подсчета ES это определение означает
использование асинхронного метода
(рис. 13). Асинхронный метод предусматривает
разделение всего времени измерений на
интервалы по 1 с и подсчет количества
интервалов, в течении которых принималась
одна или несколько битовых ошибок.
В американской
практике измерений получил распространение
метод синхронного подсчета ES, согласно
которому секундой, пораженной ошибками,
называется односекундный интервал,
следующий за появлением ошибки. В
результате измерение параметра ES
синхронизируется со временем появления
ошибок.
Как видно из рисунка
14, применение двух описанных методов к
реальной ситуации дает различные
результаты. Точный анализ показывает,
что методы дают близкие результаты
только в предположении малого параметра
ES и нормальной функции распределения
вероятности возникновения ошибки. В
случае возникновения ошибок в виде
пакетов разница в параметрах, измеренных
разными методами, может достигать 18%.
Проведенные рабочими группами ITU-T
исследования показали, что большая
часть цифровых систем передачи (в
особенности радиочастотные системы
передачи с различными методами
помехозащищенного кодирования) при
работе дают именно пакетное распределение
ошибок.
Рисунок 14 — Методы
подсчета параметра ES
Каждый метод имеет
свои преимущества и недостатки.
Преимуществом асинхронного метода
измерения является простота его
реализации в конкретных приборах, а
метода синхронного подсчета — его
инвариантность относительно выбора
времени начала измерения, что приводит
к следующим важным следствиям:
-
результаты,
измеренные разными приборами одновременно
на одном канале, точно совпадают; -
результаты,
полученные при измерениях в различных
частях цифрового канала, точно совпадают
при условии, что канал не вносит
дополнительных ошибок; -
результаты,
полученные методом синхронного подсчета,
более отражают смысл измерения ES как
общего времени негарантированной
цифровой передачи, и могут использоваться
операторами для гибкого регулирования
тарифной политики и т.д.
Таким образом,
использование метода синхронного
подсчета параметра ES представляет
оборудование систем передачи в более
выгодном свете, однако результаты таких
измерений являются инвариантными ко
времени начала теста и учитывают
возможное распределение ошибок в виде
пакетов.
Основным недостатком
синхронного метода подсчета параметра
ES является вторичное значение другого
важного параметра — EFS. Действительно в
контексте методологии синхронного
измерения ES параметр EFS невозможно
определить явно, а только как производную
параметра ES.
Для проведения
измерений без отключения цифрового
канала используются алгоритмы анализа
избыточного циклового кода. Алгоритм
такого анализа представлен на рисунке
15.
Рисунок 15 — Алгоритм
использования избыточного циклового
кода
Алгоритм использования
избыточного циклового кода следующий:
информационный поток, передаваемый
затем по цифровому каналу, разбивается
на несколько блоков данных фиксированного
размера. Для каждого блока данных
последовательность битов делится на
полином заданного вида (в зависимости
от типа кода). В результате деления
образуется остаток, передаваемый вместе
с блоком данных в составе цикла (кадра)
в канале. Процедура деления потока
данных на блоки и передача их с рассчитанным
остатком от деления приводит к
необходимости использования в аппаратуре
передачи цикловой структуры. Таким
образом, измерения параметров ошибки
без отключения канала возможны только
для систем передачи с цикловой структурой.
Остаток от деления передается в составе
цикла в виде контрольной суммы. На
приемной стороне делаются аналогичные
вычисления остатка от деления, результат
расчета сравнивается с переданной
контрольной суммой. Расхождение
результатов свидетельствует о наличии
битовой ошибки в блоке.
При такой методологии
блок анализируется в целом. В блоке
регистрируется только одна ошибка,
остальные ошибки в составе этого блока
не локализуются. Кроме того, допустима
компенсация ошибок друг другом. Как
следствие, параметры BER и CRC ERR при
измерениях могут не совпадать друг с
другом. Точность измерений без отключения
канала параметра ошибки эквивалентна
измерениям BLER и зависит не от количества
переданных битов, а от количества
переданных блоков, т.е. точность измерений
ниже.
Единственным и
главным преимуществом методики измерения
без отключения канала является возможность
измерения на реально работающем канале.
Для эксплуатационного Мониторинга
качества цифровых систем передачи
возможность таких измерений очень
важна, что и обусловило широкое
распространение этой методологии
измерений. В настоящее время именно
такие алгоритмы измерений используются
во встроенных системах самодиагностики
современных цифровых систем передачи
и во вторичных сетях передачи данных.
В зависимости от типа цикловой структуры
используются различные типы цикловых
кодов, некоторые из которых представлены
в табл. 2.
Таблица 2 — Основные
типы кодов, используемые для измерения
параметра ошибки без отключения каналов
|
Тип кода |
Полином кода |
Количество битов |
Использование |
|
CRC-6 |
Х6+Х+1 |
6 |
DS1 |
|
CRC-4 |
Х4+Х+1 |
4 |
Е1 |
|
CRC-16 |
Х16+Х12+ |
16 |
HDLC, |
|
CRC-32 |
Х32+Х26+Х23+Х22+
Х16+Х12+Х11+Х10+Х8+ |
32 |
SMDS, |
Помимо алгоритма
подсчета параметров ошибок в цифровом
канале на результаты измерений может
оказывать существенное влияние время
проведения измерений, причем как
длительность этого времени, так и выбор
времени проведения тестов по отношению
к трафику сети.
Проблемы выбора
параметров длительности проведения
тестов связаны с необходимостью
объективации результатов измерений.
Действительно, при анализе параметров
многоканальной системы передачи, в
которой для измерений задействована
лишь часть емкости, возникают два
основных вопроса: «Действительно ли
измеренные параметры соответствуют
всей системе передачи или только каналу,
в котором проводятся измерения?» и
«Будут ли сохраняться результаты
.измерений постоянными в течении суток?».
Предположим, что
в течении определенного времени
проведения измерения в цифровом канале
зарегистрировано количество N ошибок.
Для оценки достоверности измерений
обычно используется статистическая
модель со случайным возникновением
ошибок, т.е. рассчитывается коэффициент
достоверности результата как среднее
отклонение от измеренной величины.
Коэффициент достоверности позволяет
оценить реальный параметр ошибки в
предположении наихудшего варианта и
широко используется в методологии
измерений цифровых каналов.
Обязательными элементами современных сетей связи являются системы сетевого управления, с помощью которых решаются такие задачи, как реконфигурация сети, непрерывный мониторинг параметров системы связи (например, SIP GSM шлюзов), фиксация аварийных состояний, защитные переключения, хранение и обработка результатов мониторинга и т. д. Все указанные операции выполняются, как правило, автоматически, с помощью встроенных аппаратных и программных средств.
В то же время зачастую при обслуживании сетей связи не удается обойтись без ручных операций с применением портативных измерительных приборов. Классический пример – устранение сложных повреждений металлических кабелей связи, случившихся по причине намокания.
АНАЛИЗ ОШИБОК В ЦИФРОВЫХ СИСТЕМАХ ПЕРЕДАЧИ
Основное преимущество цифровой передачи по сравнению с аналоговой заключается в отсутствии накопления помех вдоль линии. Это достигается за счет восстановления формы передаваемого сигнала на каждом регенерационном участке.
Все факторы, от которых зависит длина участка, можно разделить на внутренние и внешние.
Наиболее важными внутренними считают затухание линии, межсимвольные помехи, нестабильность тактовой частоты системы, вариацию задержки, возрастание уровня шумов вследствие старения системы.
К существенным внешним факторам обычно относят переходные и импульсные помехи, внешние электромагнитные влияния, механические повреждения контактов при вибрации или ударах, ухудшение свойств передающей среды вследствие перепадов температуры.
Все они обычно предопределяют ухудшение самого чувствительного к ошибкам параметра цифровой передачи — соотношения сигнал/шум. Действительно, снижение величины данного соотношения всего на 1 дБ приводит к увеличению обобщенного параметра качества цифровых систем передачи, которым является коэффициент битовых ошибок (Bit Error Rate, BER), по крайней мере на порядок.
Согласно определению, BER представляет собой отношение числа ошибочно принятых битов к общему числу принятых битов. Его величина статистически колеблется около значения среднего коэффициента ошибок за длительный промежуток времени. Разница между непосредственно измеренным коэффициентом ошибок и долговременным средним значением зависит от числа контролируемых бит и тем самым от длительности измерения.
База времени формируется при помощи двух основных методов.
В соответствии с первым из них, на принимающем конце задается фиксированное число наблюдаемых бит и регистрируется соответствующее число бит с ошибками.
Например, если число ошибочно принятых бит оказалось равным 20, а заданное общее число принимаемых бит – 106, то коэффициент ошибок составит 20/106 = 20 x 10-6 = 2 x 10-5 .
Достоинством такого подхода является точно известное время измерения, а недостатком – невысокая надежность измерения при малом числе ошибок.
Согласно второму методу, время измерений определяется заданным числом ошибок. Измерение длится до тех пор, пока, например, не будет зафиксировано 100 ошибок. Затем на основании соответствующего числа битов данных вычисляется коэффициент ошибок.
Его недостаток заключается в том, что неизвестно время измерений, которое при малых коэффициентах ошибок может оказаться очень большим. Кроме того, вполне возможно, что счетчик бит данных заполнится полностью, и измерения прекратятся. Поэтому такой способ используется редко.
На начальном этапе развития цифровых систем передачи они применялись главным образом для передачи аналогового телефонного сигнала, и потому требования к качеству цифровых систем передачи определялись характеристиками этого сигнала.
Ошибка в цифровом сигнале приводит к быстрому изменению величины сигнала АИМ на входе канального демодулятора, и абонент слышит неприятный щелчок на выходе канала ИКМ. Экспериментально установлено, что заметные щелчки возникают только при ошибках в одном из первых двух наибольших по весу символов кодовой группы, что соответствует максимальному (положительному или отрицательному) изменению сигнала АИМ. Качество связи считается удовлетворительным, если в каждом канале наблюдается не более одного щелчка в минуту. При частоте дискретизации, равной 8 кГц, по каналу передается 8000 x 60 = 480 тыс. кодовых групп в минуту, причем опасными в отношении щелчков являются 960 тыс. старших разрядов. Если считать, что вероятность ошибки для любого разряда кодовой группы одинакова, то при допущении одного щелчка в минуту вероятность ошибки в линейном тракте не должна быть более 1/960 000 = 10-6.
С учетом передачи данных, которая более чувствительна к ошибкам передачи, для эталонного международного соединения протяженностью 27 500 км величина BER не должна превышать 10-7.
Ошибки можно обнаружить двумя основными методами.
Во-первых, во время приемки и настройки линий связи, поиске неисправностей и ремонте выполняются измерения с перерывом связи, которые реализуются по трем схемам подключения: точка-точка, шлейф и транзит.
Во-вторых, для мониторинга сети и качественной оценки ее состояния, обнаружения и устранения повреждений используются измерения без перерыва связи.
Измерение BER без перерыва связи требует точного знания структуры цифрового сигнала. Таким сигналом в составе цикла, например первичного цифрового сигнала Е-1, является цикловой синхросигнал, занимающий 7 бит нулевого канального интервала (КИ) сигнала E-1.
Цикловой сигнал передается в каждом втором цикле сигнала E-1, причем каждый цикл E-1 содержит 32 КИ и, следовательно, 32 х 8 = 256 бит. Таким образом, относительная доля циклового синхросигнала в сигнале E-1 составляет 7/(256 x 2) < 1,4%. Поэтому достоверность оценки BER с помощью циклового синхросигнала очень низка.
Еще один известный метод оценки качества цифровой передачи основан на обнаружении ошибок кода. Он используется, например, в цифровых трактах T-1/E-1, где применяются коды с чередованием полярности единиц AMI и HDB-3. Однако с помощью измерителя ошибок кода нельзя выявить истинное значение коэффициента битовых ошибок. Отклонения между результатами измерения ошибок кода и обычного измерения ошибок методом побитового сравнения становятся особенно заметными при коэффициентах ошибок более 10-3. Кроме того, нарушение правил кодирования часто распространяется и на нескольких бит, находящихся после бита с ошибкой. Вследствие этого зависящее от содержания сигнала смещение и погрешность при больших коэффициентах ошибок делают невозможным точный анализ распределения ошибок.
Итак, практическая оценка BER возможна только в режиме измерений с перерывом связи и посылкой эталонных испытательных сигналов. При измерении BER испытательный сигнал должен как можно лучше имитировать реальный, т. е. иметь случайный характер. В качестве такого испытательного сигнала обычно используют псевдослучайную последовательность битов (ПСП) с заданной структурой, близкой к настоящему информационному сигналу. Такие последовательности формируются тактируемыми регистрами сдвига с обратной связью.
Цифровой испытательный сигнал заменяет обычно передаваемый информационный сигнал и оценивается на приемном конце измерителем ошибок.
Таким образом, необходимый в условиях нормальной эксплуатации непрерывный мониторинг ошибок цифровой передачи методом BER без перерыва связи практически невозможен.
В настоящее время для оценки качества цифровых систем передачи в эксплуатационных условиях применяется метод измерения блочных ошибок. Как нетрудно догадаться, главное его достоинство состоит в том, что он основан на использовании самого информационного сигнала и выполняется без прерывания связи.
Все методы измерения блочных ошибок предполагают введение избыточности в информационный сигнал, обработку этого вспомогательного сигнала по определенному алгоритму и передачу результата обработки на принимающую сторону, где принятый сигнал обрабатывается по тому же алгоритму, что и при передаче, а итог сравнивается с результатом обработки, полученным от передающей стороны. При их разнице переданный блок считается ошибочным.
Известно несколько способов обнаружения блочных ошибок. Способы поблочного контроля четности и контрольной суммы не позволяют распознать все типы ошибок, тем самым ограничивая их практическую применимость. Пожалуй, единственным универсальным способом измерения ошибок без перерыва связи является контроль при помощи циклического избыточного кода (Cyclical Redundancy Check, CRC).
�
Таблица 1. Измерения в цифровых системах связи и соответствующие им процедуры могут применяться для решения целого ряда задач.
| Область применения измерений | Измерительные процедуры |
| Разработка оборудования | Испытания с применением высокоточного контрольно-измерительного оборудования, отработка и проверка программного обеспечения, анализ результатов |
| Производство оборудования | Оперативные измерения параметров оборудования и сравнение их с эталонными, проверка дистанционного управления, контроль комплектующих изделий |
| Инсталляция и линейные испытания оборудования | Измерения с перерывом связи, долговременный анализ, сохранение результатов, использование высокоточных и стандартных приборов |
| Нормальная эксплуатация и техническое обслуживание при поиске и устранении неисправностей | Измерения с перерывом и без перерыва связи, включая непрерывный мониторинг с помощью встроенных систем тестирования и измерения с помощью стандартных приборов, имитация ошибок и аварийных сигналов, контроль качества каналов |
| Ремонт и калибровка — локализация дефектов монтажа и печатных плат, имитация условий эксплуатации | Лабораторное оборудование для проверки на соответствие нормативной документации, испытательные стенды |
Дата введения 1975-07-01
ВВЕДЕН В ДЕЙСТВИЕ постановлением Государственного комитета стандартов Совета Министров СССР от 29 марта 1974 г. N 748
ПРОВЕРЕН в 1985 г. Постановлением Госстандарта от 19.06.85 N 1723 срок действия продлен до 01.07.90*
_________________
* Ограничение срока действия снято по протоколу N 4-93 Межгосударственного Совета по стандартизации, метрологии и сертификации (ИУС N 4, 1994 г.). — Примечание.
ПЕРЕИЗДАНИЕ (декабрь 1985 г.) с Изменениями N 1, 2, утвержденными в октябре 1980 г., июне 1985 г. (ИУС 12-80, 9-85).
ВНЕСЕНО Изменение N 3, утвержденное и введенное в действие Постановлением Государственного комитета СССР по управлению качеством продукции и стандартам от 14.12.89 N 3721 с 01.06.90
Изменение N 3 внесено юридическим бюро «Кодекс» по тексту ИУС N 3, 1990 г.
Настоящий стандарт распространяется на каналы передачи данных (ПД), работающие в синхронном режиме со скоростями до 9600 бит/с включительно, и устанавливает методы измерений следующих параметров:
коэффициента эффективности (технической пропускной способности) канала ПД;
своевременности поступления данных из канала ПД;
коэффициента ошибок по элементам дискретного канала;
коэффициента ошибок по блокам дискретного канала;
коэффициента необнаруженных ошибок канала ПД;
краевых искажений.
В настоящем стандарте учтены рекомендации МККТТ V50-V53.
Методы измерений коэффициента эффективности и своевременности поступления данных из канала ПД распространяются на каналы с решающей обратной связью (РОС) с последовательной передачей блоков (знаков) данных с блокировкой, с ожиданием сигнала обратной связи при однократной передаче и с накоплением правильно принятых блоков (знаков).
В зависимости от типа конкретной системы ПД допускается измерять только часть указанных параметров.
Значения, определяемые приведенными в настоящем стандарте методами измерений, представляют собой индивидуальные значения для каждого измеряемого параметра.
Определения терминов, применяемых в настоящем стандарте, приведены в справочном приложении 1.
(Измененная редакция, Изм. N 1, 2).
1. ИЗМЕРЕНИЕ КОЭФФИЦИЕНТА ЭФФЕКТИВНОСТИ КАНАЛА ПД ПО СИГНАЛАМ «ПЕРЕСПРОС» И ВРЕМЕНИ ЦИКЛОВОГО ФАЗИРОВАНИЯ
1.1. Аппаратура
1.1.1. Счетное устройство (СУ), электрические параметры входных цепей которого на стыке с устройством защиты от ошибок (УЗО) должны соответствовать требованиям ГОСТ 23675-79 или ГОСТ 18146-72.
Объем счетчика должен определяться конкретно для каждого канала ПД.
1.1.2. Измеритель времени циклового фазирования (ИВФ), электрические параметры входных цепей которого на стыке с УЗО должны соответствовать требованиям ГОСТ 23675-79 или ГОСТ 18146-72.
Объем счетного устройства ИВФ должен определяться конкретно для каждого УЗО.
1.1.1, 1.1.2. (Измененная редакция, Изм. N 3).
1.1.3. Генератор испытательного сигнала (ГИС 1), электрические параметры входных и выходных цепей которого на стыке с УЗО должны соответствовать требованиям ГОСТ 23675-79 или ГОСТ 18146-72.
Тест должен состоять из 511-элементной рекуррентной последовательности. В технически обоснованных случаях может быть использован тест другого вида.
Скорости и алгоритмы работы определяются аппаратурой ПД (УЗО) и устройством преобразования сигналов (УПС).
(Измененная редакция, Изм. N 1, 3).
1.2. Подготовка к измерению
1.2.1. Структурная схема измерения приведена на черт.1.
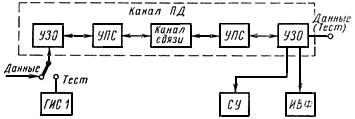
Черт.1
(Измененная редакция, Изм. N 1).
1.3. Проведение измерений
1.3.1. В канал ПД подают данные либо тест, вырабатываемый генератором испытательного сигнала (ГИС 1).
(Измененная редакция, Изм. N 1).
1.3.2. При наличии ошибок в блоках (знаках) данных приемник УЗО выдает сигнал «переспрос».
1.3.3. Сигналы «переспрос» подсчитываются устройством СУ за сеанс измерения.
1.3.4. При наличии циклового фазирования УЗО выдает сигналы, определяющие начало и конец циклового фазирования.
1.3.5. Время циклового фазирования измеряется ИВФ.
1.4. Обработка результатов
1.4.1. Результаты подсчета сигналов «переспрос» и времени циклового фазирования снимаются оператором с устройства СУ и измерителя ИВФ соответственно или регистрируются автоматически.
1.4.2. Коэффициент эффективности канала ПД с РОС с последовательной передачей блоков (знаков) данных с блокировкой вычисляют по формуле
![]() ,
,
где — коэффициент, учитывающий снижение скорости передачи данных из-за введения проверочных и служебных единичных элементов, равный
![]() ,
,
где — число информационных единичных элементов в блоке (знаке) данных;
— число единичных элементов в блоке (знаке) данных;
— коэффициент, учитывающий снижение скорости передачи данных из-за наличия сигналов «переспрос» в режиме с последовательной передачей, равный
![]() ,
,
где — число сигналов «переспрос», подсчитанное за сеанс измерения;
— число блоков (знаков) данных, на которое блокируется вывод данных;
— скорость передачи данных, бит/с;
— длительность сеанса измерения, с (длительность сеанса измерения и достаточное время измерения приведены в рекомендуемом приложении 2);
— коэффициент, учитывающий снижение скорости передачи данных из-за циклового фазирования УЗО, равный
![]() ,
,
где — время, в течение которого УЗО находилось в режиме фазирования, с.
(Измененная редакция, Изм. N 1).
1.4.3. Коэффициент эффективности канала ПД с РОС с ожиданием сигнала обратной связи при однократной передаче блоков (знаков) данных вычисляют по формуле
![]() ,
,
где — коэффициент, учитывающий снижение скорости передачи данных из-за наличия сигналов «переспрос» в режиме с ожиданием при однократной передаче, равный
![]() ,
,
где — время, необходимое для передачи блока (знака) данных, с;
— время, необходимое для передачи сигнала «переспрос», с;
— время, необходимое для анализа блока (знака) данных, с;
— время, необходимое для анализа сигнала обратной связи, с;
— время распространения сигнала, с, равное
![]() ,
,
![]() ,
,
где — число сигналов «подтверждение», подсчитанное за сеанс измерения в режиме с ожиданием при однократной передаче, равное
![]() ,
,
где — время, затраченное на повторение данных из-за наличия сигналов «переспрос», с, равное
![]() ;
;
— время, необходимое для передачи сигнала «подтверждение», с.
1.4.4. Коэффициент эффективности канала ПД с РОС с накоплением правильно принятых блоков (знаков) данных вычисляют по формуле
![]() ,
,
где — коэффициент, учитывающий снижение скорости передачи данных из-за наличия сигналов «переспрос» в режиме с накоплением, равный
![]() ,
,
где — число подблоков в блоке данных;
— время, необходимое для передачи подблока данных, с, равное
![]() ,
,
где — время, необходимое для передачи кодовой комбинации, с;
— число комбинаций в подблоке данных;
— коэффициент, учитывающий снижение скорости передачи данных из-за ожидания сигналов «подтверждение» при многократном повторении подблоков данных, равный
![]() ,
,
где — число сигналов «подтверждение» за сеанс измерения в режиме с накоплением, равное
![]() ,
,
где — время, затраченное на повторение данных из-за наличия сигналов, «переспрос», с, равное
![]() .
.
1.4.5. При использовании УЗО, которые во время циклового фазирования выдают сигналы «переспрос», величину не измеряют и в формулах приравнивают к нулю.
2. ИЗМЕРЕНИЕ КОЭФФИЦИЕНТА ЭФФЕКТИВНОСТИ КАНАЛА ПД И СВОЕВРЕМЕННОСТИ ПОСТУПЛЕНИЯ ДАННЫХ ИЗ КАНАЛА ПД ПО СИГНАЛАМ «ГОТОВ К ПЕРЕДАЧЕ» ИЛИ «УПРАВЛЕНИЕ ИСТОЧНИКА ОКОНЕЧНОГО ОБОРУДОВАНИЯ ДАННЫХ (ООД)»
2.1. Aппаратурa
2.1.1. Устройство СУ.
2.1.2. Генератор испытательного сигнала (ГИС 1).
(Измененная редакция, Изм. N 1).
2.2. Подготовка к измерению
2.2.1. Структурная схема измерения приведена на черт.2.
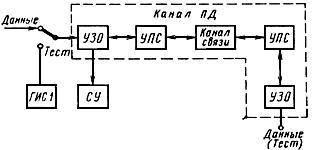
Черт.2
2.3. Проведение измерений
2.3.1. В канал ПД подают данные или тест, вырабатываемый генератором испытательного сигнала (ГИС 1). Счетчиком СУ подсчитывается количество сигналов «готов к передаче» или «управление источника ООД», что соответствует количеству блоков или знаков, выведенных в канал ПД.
(Измененная редакция, Изм. N 1).
2.4. Обработка результатов
2.4.1. Результаты подсчета блоков или знаков данных, выведенных источником в канал ПД, снимает оператор с устройства СУ или они регистрируются автоматически.
(Измененная редакция, Изм. N 1).
2.4.2. Коэффициент эффективности канала ПД вычисляют по формуле
![]() ,
,
где — число блоков или знаков данных, выведенных источником в канал ПД за сеанс измерения.
2.4.3. Своевременность поступления данных из канала ПД характеризуется следующим условием
![]() ,
,
где — число блоков или знаков данных, подсчитанное за время ;
— заданное число блоков или знаков данных.
Число знаков в блоке определяется УЗО.
(Измененная редакция, Изм. N 1).
3. ИЗМЕРЕНИЕ СВОЕВРЕМЕННОСТИ ПОСТУПЛЕНИЯ ДАННЫХ ИЗ КАНАЛА ПД ПО СИГНАЛАМ «ПЕРЕСПРОС» И ВРЕМЕНИ ЦИКЛОВОГО ФАЗИРОВАНИЯ
3.1. Аппаратура
3.1.1. Устройство СУ.
3.1.2. Измеритель ИВФ.
3.1.3. Генератор испытательного сигнала (ГИС 1).
(Измененная редакция, Изм. N 1).
3.2. Подготовка к измерению
3.2.1. Структурная схема измерения приведена на черт.1.
3.3. Проведение измерений
3.3.1. В канал ПД подают данные либо тест.
3.3.2. При наличии ошибок в блоках (знаках) данных приемник УЗО выдает сигналы «переспрос».
3.3.3. Сигналы «переспрос» подсчитываются устройством СУ за сеанс измерения.
3.3.4. При наличии циклового фазирования УЗО выдает сигналы, определяющие начало и конец циклового фазирования.
3.3.5. Время циклового фазирования измеряется ИВФ.
3.4. Обработка результатов
3.4.1. Результаты подсчета сигналов «переспрос» и времени циклового фазирования снимает оператор с устройства СУ и измерителя ИВФ соответственно или они регистрируются автоматически.
3.4.2. Своевременность поступления данных из канала ПД с РОС с последовательной передачей блоков (знаков) данных с блокировкой определяют как суммарное время задержки , вычисляемое по формуле
![]() ,
,
где — время, необходимое для передачи заданного объема данных при отсутствии возмущающих факторов в канале связи и сбоев в аппаратуре ПД, с, равное
![]() ,
,
где — число информационных единичных элементов в заданном объеме данных;
— коэффициент, учитывающий длину информационной части блока (знака) данных и равный
![]() ,
,
— время задержки данных в канале ПД, вызванное наличием сигналов «переспрос», с, равное
![]() ,
,
где — число сигналов «переспрос», подсчитанное за время не превышающее ;
— допустимое время для передачи заданного объема данных, с.
3.4.3. Своевременность поступления данных из канала ПД с РОС с ожиданием сигнала обратной связи при однократной передаче блоков (знаков) данных определяют как суммарное время задержки, вычисляемое по формуле
![]() ,
,
где — время задержки данных в канале ПД, вызванное наличием сигналов «переспрос» и ожиданием сигнала «подтверждение», с, равное
![]() ,
,
где — время, затраченное на ожидание сигнала «подтверждение», с, равное
![]() .
.
3.4.4. Своевременность поступления данных из канала ПД с РОС с накоплением правильно принятых блоков (знаков) данных определяют как суммарное время задержки , вычисляемое по формуле
![]() ,
,
где — время, необходимое для передачи заданного объема данных с учетом многократного повторения при отсутствии возмущающих факторов в канале связи и сбоев в аппаратуре ПД, с, и равное
![]() ;
;
— время задержки данных в канале ПД, вызванное наличием сигналов «переспрос» и ожиданием сигнала «подтверждение» с учетом многократного повторения подблоков данных, с, равное
![]() ,
,
где — время задержки данных в канале ПД, вызванное ожиданием сигнала «подтверждение» с учетом многократного повторения подблоков данных, с, равное
![]() .
.
3.4.5. При использовании УЗО, которые во время циклового фазирования выдают сигналы «переспрос», величину не измеряют и в формулах приравнивают к нулю.
4. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ОШИБОК ПО ЭЛЕМЕНТАМ И БЛОКАМ В ДИСКРЕТНОМ КАНАЛЕ
4.1. Aппapатура
4.1.1. Устройство выявления ошибок в дискретном канале (УВО-ДК), электрические параметры входных и выходных цепей которого на стыке с устройством преобразования сигналов должны соответствовать требованиям ГОСТ 23675-79. Скорости и алгоритмы работы должны определяться УПС. УВО-ДК должно содержать устройство фазирования принимаемого теста с эталонным и индикатор расфазирования.
(Измененная редакция, Изм. N 3).
4.1.2. Устройство СУ может входить в состав УВО-ДК либо быть самостоятельным.
4.1.3. Генератор испытательного сигнала (ГИС 2) электрические параметры входных и выходных цепей которого на стыке с УПС должны соответствовать требованиям ГОСТ 23675-79. Тест должен состоять из 511-элементной рекуррентной последовательности. Скорости и алгоритмы работы должны определяться УПС.
(Измененная редакция, Изм. N 1, 3).
4.2. Подготовка к измерению
(Введен дополнительно, Изм. N 1).
4.2.1. Структурная схема измерения для случая, когда устройство СУ входит в состав УВО-ДК, приведена на черт.3.
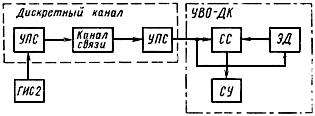
Черт.3
(Измененная редакция, Изм. N 1).
4.3. Проведение измерений
4.3.1. В дискретный канал из генератора испытательного сигнала (ГИС 2) выдается тест.
(Измененная редакция, Изм. N 1).
4.3.2. Тест, принятый устройством УПС, подается на схему сравнения (СС).
4.3.3. В схеме СС принимаемый тест сравнивается с тестом эталонного датчика (ЭД), который предварительно должен быть сфазирован с принимаемым.
4.3.4. Устройством СУ подсчитывается количество ошибочных единичных элементов и ошибочных блоков.
(Измененная редакция, Изм. N 1).
4.4. Обработка результатов
4.4.1. Результаты подсчета ошибочных единичных элементов и ошибочных блоков снимает оператор с устройства СУ, или они регистрируются автоматически.
4.4.2. Коэффициент ошибок по элементам для дискретного канала , вычисляют по формуле
 ,
,
где — число ошибочных единичных элементов, подсчитанное за сеанс измерения;
— число единичных элементов, выданное потребителю за сеанс измерения, равное .
4.4.1, 4.4.2. (Измененная редакция, Изм. N 1).
4.4.2а. Коэффициент ошибок по блокам для дискретного канала вычисляют по формуле
![]() ,
,
где — число ошибочных блоков, подсчитанное за сеанс измерения;
— число переданных блоков за сеанс измерения, равное ![]() .
.
(Введен дополнительно, Изм. N 1).
4.4.3. Ошибочные единичные элементы и блоки, подсчитанные за сеанс измерения, в котором произошло цикловое расфазирование УВО-ДК, не учитывают.
(Измененная редакция, Изм. N 1).
5. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА НЕОБНАРУЖЕННЫХ ОШИБОК КАНАЛА ПД
5.1.Аппаратура
5.1.1. Устройство выявления ошибок (УВО), электрические параметры входных и выходных цепей которого на стыке с УЗО должны соответствовать требованиям ГОСТ 23675-79 или ГОСТ 18146-72.
Скорости и алгоритмы работы должны определяться УЗО.
УВО должно иметь устройство циклового фазирования принимаемого теста с тестом эталонного датчика, а также индикатор расфазирования.
Устройства СУ могут входить в состав УВО либо быть самостоятельными.
Электрическая структурная схема УВО приведена в справочном приложении 3.
(Измененная редакция, Изм. N 3).
5.1.2. Генератор испытательного сигнала (ГИС 1).
5.1.3. При необходимости прибор УВО должен отличать выпадения и вставки от расфазирований, подсчитывать число вставок и выпадений и фиксировать расфазирования.
5.1.2, 5.1.3. (Измененная редакция, Изм. N 1).
5.2. Подготовка к измерению
5.2.1. Структурная схема измерения приведена на черт.4.
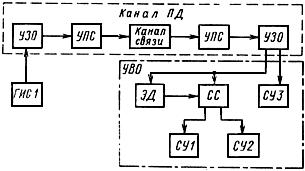
Черт.4.
(Измененная редакция, Изм. N 1).
5.3. Проведение измерений
5.3.1. В канал ПД из датчика выдается тест.
5.3.2. Тест, принятый УПС, через УЗО подается на схему СС устройства УВО, где сравнивается с эталонным. Эталонный тест предварительно должен быть сфазирован с принимаемым.
5.3.3. Устройство СУ1 подсчитывает ошибочные единичные элементы.
5.3.4. Устройство СУ2 подсчитывает ошибочные блоки (знаки).
5.3.5. Устройство СУЗ подсчитывает блоки (знаки), сформированные из теста и выданные потребителю. В технически обоснованных случаях подсчет блоков (знаков) можно производить по времени передачи.
5.4. Обработка результатов
5.4.1. Результаты подсчета ошибочных информационных единичных элементов, ошибочных блоков (знаков) и блоков (знаков), сформированных из теста и выданных потребителю, снимает оператор с устройства СУ, или они регистрируются автоматически.
5.4.2. Коэффициент необнаруженных ошибочных информационных единичных элементов вычисляют по формуле
![]() ,
,
где — число необнаруженных ошибочных информационных единичных элементов, подсчитанное за сеанс измерения;
— число единичных информационных элементов, выданных потребителю за сеанс измерения, равное
![]() ,
,
где — число единичных информационных элементов в блоке (знаке), сформированном из теста;
— число блоков (знаков), сформированных из теста и выданных потребителю за сеанс измерения.
5.4.3. Коэффициент необнаруженных ошибок по блокам (знакам), сформированным из теста подсчитывают по формуле
![]() ,
,
где — число необнаруженных ошибочных блоков (знаков), подсчитанное за сеанс измерения.
5.4.4. Необнаруженные информационные ошибочные единичные элементы, блоки (знаки), подсчитанные за сеанс измерения, в котором произошло цикловое расфазирование УВО, не учитывают.
5.4.5. Ошибки, вызванные вставками и выпадениями при расчете и не учитывают.
5.4.2-5.4.5. (Измененная редакция, Изм. N 1).
5.4.6. Число выпадений и вставок должно быть зафиксировано.
6. ИЗМЕРЕНИЕ КРАЕВЫХ ИСКАЖЕНИЙ
6.1. Аппаратура
6.1.1. Измеритель краевых искажений (ИКИ) должен соответствовать требованиям ГОСТ 18627-73. Электрические параметры входных и выходных цепей ИКИ на стыке с УПС должны соответствовать требованиям ГОСТ 23675-79. Скорости и алгоритмы работы ИКИ должны определяться УПС.
Погрешность измерения не должна превышать ±3% от длительности единичного элемента.
Электрическая структурная схема ИКИ приведена в справочном приложении 4.
6.1.2. Генератор испытательного сигнала (ГИС 2).
6.1.1, 6.1.2. (Измененная редакция, Изм. N 1).
6.2. Подготовка к измерению
6.2.1. Структурная схема измерения приведена на черт.5.
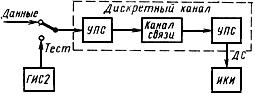
Черт.5
6.3. Проведение измерений
6.3.1. В канал связи через передатчик УПС выдаются данные либо тест.
6.3.2. При измерении краевых искажений как интервала времени между значащими моментами демодулированных сигналов (ДС) и идеальными значащими моментами из приемника УПС в ИКИ выдаются сигналы ДС и сигналы фазирования (СФ).
6.3.3. Сигналы СФ, принимаемые за идеальные значащие моменты, могут не поступать из УПС, а вырабатываться в ИКИ.
6.3.4. При измерении краевых искажений как отклонения длительности значащих интервалов ДС от длительности идеальных значащих интервалов из приемника УПС в ИКИ выдаются только сигналы ДС.
6.4. Обработка результатов
6.4.1. При измерении краевых искажений в соответствии с п.6.3.2 по шкале измерителя ИКИ производят отсчет максимального времени смещения значащих моментов сигналов ДС относительно значащих моментов сигналов СФ. Результатом отсчета является степень индивидуального искажения.
6.4.2. При измерении краевых искажений в соответствии с п.6.3.4 по шкале измерителя ИКИ проводят отсчет максимальных временных смещений длительностей значащих интервалов ДС от длительностей идеальных значащих интервалов, вырабатываемых в ИКИ.
Результатом отсчета является степень синхронного искажения.
6.4.1, 6.4.2. (Измененная редакция, Изм. N 1).
Разд.7. (Исключен, Изм. N 1).
ПРИЛОЖЕНИЕ 1 (справочное). ОПРЕДЕЛЕНИЕ ТЕРМИНОВ, ПРИМЕНЯЕМЫХ В СТАНДАРТЕ
ПРИЛОЖЕНИЕ 1
Справочное
Коэффициент эффективности — отношение реальной скорости передачи данных по каналу ПД к номинальной скорости передачи данных по этому каналу.
Своевременность поступления данных из канала ПД — передача каналом ПД заданного объема данных за время, не превышающее допустимое.
«Переспрос» — сигнал, передаваемый по каналу обратной связи для повторной передачи данных, неправильно принятых на приеме.
«Подтверждение» — сигнал, передаваемый по каналу обратной связи и свидетельствующий о том, что данные на приеме приняты правильно.
Подблок данных — часть блока данных, содержащая комбинаций корректирующего кода.
ПРИЛОЖЕНИЕ 2 (рекомендуемое). ОПРЕДЕЛЕНИЕ ВРЕМЕННЫХ ХАРАКТЕРИСТИК, ИСПОЛЬЗУЕМЫХ ПРИ ПРОВЕДЕНИИ ИЗМЕРЕНИЙ
ПРИЛОЖЕНИЕ 2
Рекомендуемое
1. Критерием расфазирования считают перерыв канала связи длительностью более 300 мс.
Примечания:
1. В технически обоснованных случаях может быть установлен другой критерий расфазирования.
2. При обработке результатов измерений должно быть указано количество аннулированных сеансов.
Длительность сеанса измерения должна быть не более 15 мин.
3. Время измерения коэффициента ошибок в дискретном канале проводной связи протяженностью не более 2500 км должно быть 50 ч. При этом измеренное значение с вероятность 0,9 не должно отличаться от истинного значения более чем на ±30%.
Если протяженность каналов () более 2500 км, указанное время умножают на коэффициент ![]() , при этом минимальное время измерения — 20 ч.
, при этом минимальное время измерения — 20 ч.
4. Коэффициент эффективности канала ПД определяют одновременно с определением коэффициента необнаруженных ошибок в целях уменьшения времени измерения , которое для каналов ПД, оборудованных УЗО с использованием циклических кодов, определяют по формуле
![]() ,
,
где — число необнаруженных ошибочных блоков. Для блоков данных длиной менее 240 информационных единичных элементов ![]() . Для блоков данных длиной 240 информационных единичных элементов 5;
. Для блоков данных длиной 240 информационных единичных элементов 5;
— плотность ошибочных единичных элементов;
![]() — функция доверительных границ, определяемая по табл.1;
— функция доверительных границ, определяемая по табл.1;
Таблица 1
|
0,95 |
0,90 |
0,80 |
|
|
1 |
0,21 |
0,26 |
0,33 |
|
2 |
0,32 |
0,38 |
0,47 |
|
3 |
0,39 |
0,45 |
0,55 |
|
4 |
0,44 |
0,50 |
0,60 |
|
5 |
0,48 |
0,54 |
0,63 |
|
6 |
0,51 |
0,57 |
0,66 |
|
7 |
0,53 |
0,59 |
0,68 |
|
8 |
0,55 |
0,62 |
0,70 |
|
9 |
0,57 |
0,63 |
0,72 |
|
10 |
0,59 |
0,65 |
0,73 |
|
11 |
0,60 |
0,66 |
0,74 |
|
12 |
0,62 |
0,67 |
0,75 |
|
13 |
0,63 |
0,68 |
0,76 |
|
14 |
0,64 |
0,69 |
0,77 |
|
15 |
0,65 |
0,70 |
0,78 |
|
20 |
0,69 |
0,74 |
0,81 |
|
25 |
0,72 |
0,76 |
0,83 |
|
30 |
0,74 |
0,78 |
0,84 |
|
40 |
0,77 |
0,81 |
0,87 |
|
50 |
0,79 |
0,83 |
0,88 |
|
60 |
0,81 |
0,84 |
0,89 |
|
80 |
0,83 |
0,86 |
0,90 |
|
100 |
0,85 |
0,88 |
0,91 |
— доверительная вероятность;
— длительность блока данных, мс;
— вероятность необнаруженных ошибок по единичным элементам, равная
![]() ,
,
где — заданная вероятность необнаруженных ошибочных блоков.
Для блоков данных длиной менее 240 информационных единичных элементов ![]() 0,2.
0,2.
Для блоков данных длиной 240 информационных единичных элементов ![]() 0,25.
0,25.
Эта величина может быть уточнена по результатам статистических испытаний.
Пример количественного расчета времени измерения для длины блоков данных, используемых в аппаратуре ПД при доверительной вероятности 0,9 и 1·10, 1·10, приведен в табл.2.
Таблица 2
|
Длина блока единичных элементов |
Скорость передачи данных , бит/с |
Длительность блока , мс |
Число необнаруженных ошибочных блоков |
Время измерений , ч при вероятности ошибок |
|
|
1·10 |
1·10 |
||||
|
261 |
600 |
435,00 |
5 |
280 |
2800 |
|
1200 |
217,50 |
140 |
1400 |
||
|
2400 |
108,75 |
70 |
700 |
||
|
4800 |
54,38 |
35 |
350 |
||
|
117 |
600 |
195,00 |
10 |
168 |
1680 |
|
1200 |
97,50 |
84 |
840 |
||
|
2400 |
48,75 |
42 |
420 |
||
|
4800 |
24,38 |
21 |
210 |
||
|
69 |
600 |
115,00 |
10 |
100 |
1000 |
|
1200 |
57,50 |
50 |
500 |
||
|
2400 |
28,75 |
25 |
250 |
||
|
4800 |
14,38 |
13 |
130 |
||
|
45 |
600 |
75,00 |
10 |
64 |
640 |
|
1200 |
37,50 |
32 |
320 |
||
|
2400 |
18,75 |
16 |
160 |
||
|
4800 |
9,38 |
8 |
80 |
(Измененная редакция, Изм. N 1).
ПРИЛОЖЕНИЕ 3 (справочное). Электрическая структурная схема УВО
ПРИЛОЖЕНИЕ 3
Справочное
Электрическая структурная схема УВО
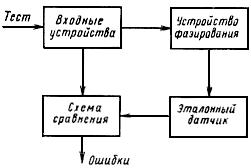
ПРИЛОЖЕНИЕ 4 (справочное). Электрическая структурная схема ИКИ
ПРИЛОЖЕНИЕ 4
Справочное
Электрическая структурная схема ИКИ
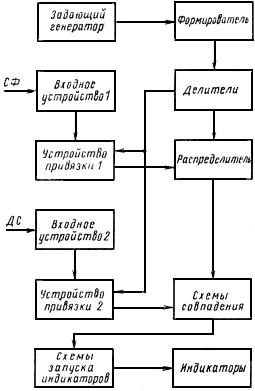
6.1. Определения коэффициента ошибок
6.2. Математическое выражение коэффициента битовых ошибок
6.3. Нормы на параметры ошибок систем передачи
6.4. Принципы построения измерителей ошибок
6.5. Техника измерения коэффициента ошибок
6.1. Определения коэффициента ошибок
Коэффициент ошибок – важнейшая характеристика линейного тракта. Он измеряется как для отдельных участков регенерации, так и для тракта в целом. Определяется коэффициент ошибок kОШ, по формуле:
kОШ = NОШ /N, (6.1)
где N – общее число символов, переданных за интервал измерения; NОШ – число ошибочно принятых символов за интервал измерения.
Измерение коэффициента ошибок носит статистический характер, так как получаемый за конечное время результат является случайной величиной. Относительную погрешность измерения в случае нормального закона распределения числа ошибок, что допустимо при N≥10, можно определить по формуле:
. (6.2)
Здесь ![]() — коэффициент, зависящий от доверительной вероятности результата измерений:
— коэффициент, зависящий от доверительной вероятности результата измерений:
![]() , (6.3)
, (6.3)
где ![]() — обратная функция интеграла вероятности
— обратная функция интеграла вероятности ![]() :
:
![]() . (6.4)
. (6.4)
Значение kОШ позволяет оценивать вероятность ошибки pОШ – количественную оценку помехоустойчивости. Область возможных значений оценки, в которой с заданной доверительной вероятностью будет находиться значение pОШ, определяется верхней (pВ) и нижней (pН) доверительными границами. При нормальном законе распределения числа ошибок значения pВ и pН определяются по формулам:
![]() , (6.5)
, (6.5)
![]() , (6.6)
, (6.6)
Очевидно, что точность оценок вероятности ошибки и коэффициента ошибки растет с увеличением N. Общее число символов цифрового сигнала, переданных за интервал измерения T, зависит от скорости передачи B: N = TB. Отсюда следует, что чем больше скорость передачи, тем быстрее и точнее можно оценить коэффициент ошибок.
6.2. Математическое выражение коэффициента битовых ошибок
Определим коэффициент битовых ошибок для реальных приёмников, которым свойственно наличие различных источников шумов. При этом будем считать, что приёмник принимает решение, какой бит (0 или 1) был передан в каждом битовом интервале путем стробирования фототока. Очевидно, что из-за наличия шумов данное решение может быть неверным, что приводит к появлению ошибочных битов. Поэтому, чтобы определить коэффициент битовых ошибок, необходимо понять, каким образом приемник принимает решение относительно переданного бита.
Обозначим через I1 и I0 фототоки, стробированные приемником в течение 1 и 0 битов, соответственно, а через s12 и s02 соответствующие шумы. Принимая, что последние имеют гауссовское распределение, проблема установления истинного значения принятого бита имеет следующую математическую формулировку. Фототок для битов 1 и 0 является выборкой гауссовской переменной со средним значением I1 и вариацией s1, а приёмник должен отслеживать этот сигнал и решать, является ли переданный бит 0 или 1. При этом существует много возможных правил принятия решения, которые могут быть реализованы в приёмнике с целью минимизации коэффициента битовых ошибок. Для значения фототока I этим оптимальным решением является наиболее вероятное значение переданного бита, которое определяется путём сравнения текущего значения фототока с пороговым значением Iп, используемым для принятия решения.
Рисунок 6.1. Функция плотности вероятности фототока принятых сигналов
Пусть при I ³ Iп принимается решение о том, что был передан бит 1, в противном случае – бит 0. Когда биты 1 и 0 равновероятны, что и рассматривается в дальнейшем, пороговый ток приблизительно равен:
![]() (6.7)
(6.7)
Геометрически Iп представляет собой значение тока I, для которого две кривые плотности вероятностей (рис. 6.1) пересекаются.
Вероятность того, что I < Iп, т. е. вероятность ошибки при передаче бита 1, обозначим через Р0,1, а вероятность решения для переданного бита 1, когда I ³ Iп при переданном 0, обозначим Р1,0.
Пусть Q(х) обозначает вероятность того, что нулевая средняя вариация гауссовской переменной превышает значение х, тогда:
(6.8)
а
(6.9)
а
(6.10)
Можно показать [14], что BER определяется,
(6.11)
Очень важно отметить, что в ряде случаев эффективным является использование изменяемого в зависимости от уровня сигнала порога принятия решения, как, например, шума оптического усилителя. Многие высокоскоростные приёмники обладают такой особенностью. Однако более простые приемники имеют порог, соответствующий среднему уровню принимаемого тока, а именно (I1 + I0)/2. Такая настройка порогового значения дает большой коэффициент битовых ошибок, определяемый выражением [14].
(6.12)
Выражение (6.11) можно использовать для оценки BER, когда известны как мощность полученного сигнала, соответствующего битам 0 и 1, так и статистика шумов.
6.3. Нормы на параметры ошибок систем передачи
Битовые ошибки являются основным источником ухудшения качества связи, проявляющегося в искажении речи в телефонных каналах, недостоверности передачи информации или снижении пропускной способности передачи данных, и характеризуются статистическими параметрами и нормами на них, которые определены соответствующей вероятностью выполнения этих норм. Последние делятся на долговременные и оперативные нормы, первые из которых определяются рекомендациями ITU-T G.821 и G.826, а вторые – М.2100, М.2110 и М.2120, при этом, согласно М.2100, качество цифрового тракта по критерию ошибок делят на три категории:
- нормальное – BER < 10-6;
- пониженное – 10-6 ≤ BER < 10-3 (предаварийное состояние);
- неприемлемое – BER ≥ 10-3 (аварийное состояние).
Так как появление ошибок является следствием совокупности всех текущих условий передачи цифровых сигналов, имеющих случайный характер, то при отсутствии данных о законе распределения ошибок его отдельные элементы могут быть определены с определенной степенью достоверности только по результатам продолжительных измерений. В то же время на практике необходимо, чтобы значения параметров ошибок для ввода в эксплуатацию и технического обслуживания систем передачи основывались на достаточно коротких интервалах времени измерения. Исходя из этого, были определены следующие параметры ошибок [14]:
- секунда с ошибками (error second, ES) – односекундный интервал, содержащий хотя бы один ошибочный бит;
- секунда, пораженная ошибками (severely error second, SES) – односекундный интервал с BER ≥ 10-3.
Данные параметры ошибок должны оцениваться в течение времени готовности (available time), отсчет которого начинается с первой секунды из десяти следующих друг за другом секунд, в каждой из которых BER<10-3. ITU-T M.2100 регламентирует нормы качества (performance objectives, PO) на выраженные максимальным процентом времени параметры ошибок, которые зависят только от скорости передачи и приводятся для условного эталонного соединения (hypothetical reference connection, HRC/HRX/) длиной 27500 км. При этом нормы качества распределяются по участкам соединения соответствующей категории качества. В качестве эталонной модели такого распределения принимается участок высокой категории качества протяженностью 25000 км, которому присваивается 40% от общей нормы качества на параметры ошибок передачи точка-точка, что в пересчете на 1 км, дает 0.0016 %/км.. Остальные 4 участка (2 среднего качества и 2 с приемлемым качеством) длиной 2 х 1250 км расположены по обе стороны от центрального. Поэтому распределение, пропорциональное протяженности L км тракта высокой категории качества, будет определяться, как
AL = 0.0016 · L %/км. (6.13)
Нормы качества на цифровые тракты и каналы подразделяются на настроечные и эксплуатационные, причем вводимые в эксплуатацию впервые или после проведения корректирующих действий они должны сдаваться по настроечным нормам качества, а в процессе эксплуатации должны соответствовать эксплуатационным нормам. Обычно [105] эксплуатационная норма представляется в виде эталонной нормы качества (reference performance objective, RPO)
RPO = A · T · PO, (6.14)
а настроечная, включающая запас на старение, используемая при вводе в эксплуатацию (bringing into service objective, BISO), определяется, как половина RPO, т.е.
BISO = RPO/2. (6.15)
Здесь PO – норма качества оцениваемого параметра, а T = 86400 с (одни сутки) – продолжительность измерений (количество односекундных интервалов).
Для анализа результатов, полученных в процессе измерений, используются также предельные значения S1и S2 норм (рисунок 6.2), которые соответствуют числу событий (ES,SES) и определяются, как:
S1 = RPO/2 – D и S2 = RPO/2 + D, (6.16)
где D = 2![]() — дисперсия оцениваемого параметра.
— дисперсия оцениваемого параметра.
Рисунок 6.2. Предельные значения и условия ввода в эксплуатацию системы передачи
При соответствии результатов измерений норме S1 цифровой тракт может быть введен в эксплуатацию без всякого сомнения, а при превышении нормы S2 в обязательном порядке требуется повышение качества испытываемого цифрового тракта, т.е. должны быть проведены корректирующие действия с повторными измерениями. Если значение ES или SES лежит в интервале от S1 до S2, цифровой тракт может быть введен в эксплуатацию условно или временно с продолжением измерений в течение 7 суток. Данный подход к оценке качества цифровых систем передачи по параметрам ошибок позволяет сократить время измерений и получить норму цифрового тракта суммированием норм цифровых участков. При этом значения RPO, D, S1 и S2 выражаются в виде числа событий за установленный интервал времени, а не в виде процентов времени.
Для измерения коэффициента ошибок разработан ряд специальных BER анализаторов – измерителей коэффициента ошибок, включающих генераторы псевдослучайных и детерминированных последовательностей передаваемых кодированных символов, а также приемное оборудование, осуществляющее собственно измерение коэффициента ошибок. В случае посимвольного сравнения кодов измерение может быть выполнено с использованием шлейфа, т.е. путем измерения ошибок с одной оконечной станции при установке на противоположном конце шлейфа. Другой метод основан на выделении ошибок благодаря избыточности используемых кодов и используется для измерений от передающей до приемной сторон тракта или участка линии, т.е. когда выделение и фиксация ошибок производятся на ее приемном конце. Очевидно, что в первом случае требуется использование одного комплекта, а во втором – двух комплектов приборов. При этом измеренное значение коэффициента ошибок отражает качество передачи при прохождении сигнала в обоих направлениях и в каждом направлении соответственно.
6.4. Принципы построения измерителей ошибок
В зависимости от скорости передачи контролируемой системы передачи в анализаторе используются различные схемотехнические решения.
Рисунок 6.3. Генератор низкоскоростного BER анализатора
Низкоскоростной генератор тестовых кодов и детектор ошибок. Используемый в телекоммуникациях анализатор BER, состоящий [106] из генератора тестовых кодов и собственно анализатора ошибок, представлен на рисунках 6.3 и 6.4. Он предназначен для невысоких (до 200 Мбит/с) битовых скоростей, учитывая, что максимальные типовые скорости составляют 44.736 Мбит/с (DS3) в Северной Америке и 139.364 Мбит/с – за пределами Северной Америки.
PRBS с генератором кодовых групп, представленный на рис. 6.16, синхронизируется либо от источника тактового сигнала с фиксированной частотой (согласно G.703), либо от синтезатора, осуществляя тем самым изменение частоты синхронизации. В связи с этим использование данных средств требует задания некоторых определенных частот синхронизации и наличия возможности обеспечения их небольших смещений от ±15 до ±50 ppm. Для повторения тестовых кодов схема PRBS и генератор кодовых групп обычно имеют триггерную схему, управляющую либо выходным усилителем бинарных данных, который обеспечивает данные и данные с сопровождающим синхросигналом, либо выходную схему кодированных данных. Это позволяет создавать цикловую синхронизацию сигнала в соответствии с требованием, например, системы SONET/SDH. Кроме этого, данная схема способствует созданию соответствующего интерфейсного кода для эффективного восстановления тактовой синхронизации. Выходной усилитель обеспечивает необходимый уровень сигнала в соответствии со спецификацией электрического интерфейса, в том числе сигнала с чередованием полярности импульсов.
Рисунок 6.4. Низкоскоростной детектор ошибок
Детектор ошибок, показанный на рисунке 6.4, получает стандартный кодированный сигнал, восстанавливает генератор синхросигнала и устраняет кодирование для обеспечения бинарной даты и синхросигналов. Он обнаруживает любые нарушения алгоритма интерфейсного кода и посылает сигналы на счетчик ошибок, что составляет первый уровень процесса обнаружения ошибок. При работе с цикловыми сигналами приемник захватывает любой присутствующий элемент цикловой синхронизации, проверяет наличие цикловых ошибок и декодирует любые встроенные сигналы тревоги, или CRC биты, тем самым обеспечивая возможность измерения.
Наконец, бинарные данные и синхросигнал направляются на детектор ошибок и генератор эталонных тестовых кодов, которые проверяют полученный тестовый код бит за битом на предмет обнаружения логических ошибок. Временная база контролирует пропускание измерения для непрерывного, периодического и ручного режима. Накопленное количество ошибок обрабатывается для получения значения BER и анализа функционирования при наличии ошибок.
Высокоскоростной генератор тестовых кодов и детектор ошибок. На рисунках 6.5 и 6.6 показаны схемы [14] для 3 Гбит/с генератора тестовых кодов и детектора ошибок. Вследствие высокой битовой скорости генерация последовательных PRBS и кодовых групп на этой скорости не представляется целесообразной. Поэтому тестовые коды генерируются (рисунок 6.5) как параллельные 16-битные кодовые группы при максимальной скорости 200 Мбит/с, используя затем выполненные по биполярной технологии регистраторы смещения и высокоемкостную память. Высокоскоростные схемы обычно выполняются на основе арсенид-галлиевых логических схем, преобразующих параллельные данные в последовательный поток на скорости до 3 Гбит/с.
Согласно данной схеме, вход синхросигнала генерируется синтезатором частоты, согласующее устройство управляется через линию фиксированной задержки, а генератор тестовых кодов и выходной усилитель синхронизируются через схему дискретной и плавно изменяемой задержки, так что фаза синхросигнала/данных может изменяться как в положительном направлении, так и в отрицательном. Дискретные значения задержки составляют 250, 500 и 1000 пс, тогда как диапазон плавной задержки лежит в пределах от 0 до 250 пс с 1 пс инкрементом.
Корректор временной диаграммы, связанный с выходным усилителем, пересинхронизирует данные через триггер D типа для поддержания минимального фазового дрожания. Так как подобный тип тестового устройства обычно используется при проведении лабораторных измерений, выходные уровни синхросигнала и данных и постоянные смещения могут варьироваться для того или иного конкретного случая использования.
Детектор ошибок, показанный на рис. 6.6, имеет простое параллельное соединение, в связи с чем входы синхросигнала и данных проходят через схемы дискретной и плавной задержки, обеспечивая оптимальную настройку при обнаружении ошибок для любой фазы синхросигнала/данных. Действительно, путем настройки под контролем внутреннего процессора решающего порога и фазы синхросигнала условия функционирования детектора ошибок могут быть оптимизированы автоматически. Высокоскоростной демультиплексор преобразует последовательный поток данных в 16-битные параллельные кодовые группы наряду с поделенным на 16 синхросигналом. Параллельно соединенный генератор эталонных тестовых кодов синхронизируется с входными данными и осуществляет сравнение битов, поэтому любая ошибка фиксируется одним из двух счетчиков, первый из которых подсчитывает число ошибок, а второй – общее число битов. Процессор измерения обеспечивает анализ функционирования при наличии ошибок с разрешением до 1 мс.
6.5. Техника измерения коэффициента ошибок
Рассмотрим измерение коэффициента ошибок путем посимвольного сравнения и подсчета ошибочно принятых элементарных импульсов. Для этого вначале (перед измерением) на передающей станции с помощью оптического аттенюатора устанавливают заданный в технических условиях на аппаратуру линейного тракта уровень оптического излучения. Затем на передающем конце подключают генератор испытательных сигналов, а на приемном – измеритель коэффициента ошибок и, изменяя значения уровней средней мощности, измеряют коэффициент ошибок. Время измерения определяют в зависимости от скорости передачи, объема информации и значений коэффициента ошибок Кошi (BERi).
Коэффициент ошибок при заданном уровне оптического излучения вычисляют по формуле [14]
![]() (6.17)
(6.17)
где
![]() , , (6.18)
, , (6.18)
где ![]() и
и ![]() — погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
— погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
3.1 Бинарный канал и методы анализа его параметров.
Рассмотрение
методологии измерений цифровых каналов
начнем с описания методов измерения
цифровых каналов с передачей информации
в простой двоичной форме (без линейного
кодирования) — бинарных цифровых каналов
(рис. 6). В современных
информационно-телекоммуникационных
системах для передачи цифровой информации
используются различные типы модуляции
и многоуровневого кодирования, однако
оконечное оборудование систем передачи
в той или иной степени использует именно
бинарный цифровой канал, поэтому
методология измерений бинарного канала
является фундаментом измерений цифровых
каналов связи. Более того, для анализа
систем с различными типами модуляции
и кодирования используются данные
методологии измерений по битам, т.е.
имитируется процесс декодирования
(демодуляции) сигнала до двоичного вида,
а затем полученный сигнал анализируется.
Таким образом, методология измерений
параметров бинарного канала представляет
собой инвариант методологии измерений
любых цифровых каналов.
Рисунок 6 — Бинарный
цифровой канал
Основное назначение
бинарного цифрового канала — это передача
цифровой информации в двоичной форме,
т.е. в виде битов, поэтому основные
параметры качества такой цифровой
передачи связаны с параметром ошибки
по битам (Bit Error Rate — BER) и его производными.
Измерения по параметру BER вошли в методики
измерений всех первичных и вторичных
сетей.
Для правильного
понимания всех нюансов измерений
цифровых каналов связи необходимо
глубокое понимание технологии измерений
бинарного цифрового канала.
Различаются два
типа измерений бинарного канала —
измерения с отключением канала и
измерения без отключения канала. При
отключении канал не используется в
процессе измерений для передачи реального
цифрового трафика. В качестве источника
и приемника двоичного сигнала используются
анализаторы цифрового канала. Измерения
без отключения канала предусматривают
использование специальных алгоритмов
анализа параметров канала в процессе
при передаче реального трафика.
При измерениях с
отключением канала сигнал передается
в виде тестовой последовательности,
которая принимается на другом конце
канала (приемник) и затем проводится
анализ ошибок, вносимых каналом.
Анализатор приемника должен обеспечивать
предсказание структуры последовательности,
т.е. требуется так называемая синхронизация
тестовой последовательности. Для
измерений используются разные тестовые
последовательности, фиксированные и
псевдослучайные, с различными алгоритмами
синхронизации тестовой последовательности.
Измерения с отключением канала — это
единственный метод анализа параметров
бинарного цифрового канала с точностью
до единичной ошибки по битам (битовая
ошибка). Это гарантируется принципом
сравнения реально принятой последовательности
битов с предсказанной, которая, в свою
очередь, точно совпадает с генерируемой
последовательностью.
Измерения без
отключения канала часто называются
мониторингом, поскольку проводятся в
режиме работающего канала, а анализатор
в этом случае подключается параллельно
и осуществляет пассивный мониторинг
канала. Алгоритм организации измерений
основан на применении различных типов
цикловых кодов или служебной информации,
передаваемой в канале. Действительно,
в реально работающем канале, с реальным
трафиком нельзя предсказать передаваемую
информацию, следовательно нельзя просто
сравнить реальную последовательность
битов с предсказанной последовательностью,
поэтому невозможно локализован единичную
битовую ошибку. Методы измерения без
отключения канала основаны на идентификации
битовой ошибки в некотором блоке
переданной информации, таким образом,
объективная точность измерения ограничена
размерами блока. Обычно две ошибки в
блоке идентифицируются как одна. В то
же время несомненное преимущество
метода — отсутствие необходимости
отключения канала — определило широкое
его распространение.
Возникновение
ошибок по битам и их влияние на параметры
цифровой передачи
В аналоговых
системах передачи канал, воздействуя
на параметры передаваемого аналогового
сигнала, снижает качественные параметры
сигнала. В цифровых системах передачи
различные воздействия на цифровой канал
приводят к снижению основного качественного
параметра — параметра ошибки. Причины
возникновения ошибок в цифровом канале
имеют аналоговую природу, поскольку
связаны с интерференцией, затуханием
в линии и различными аддитивными шумами
(рис. 7).
Рисунок 7 — Основные
источники ошибок в цифровом канале
На рисунке 7
представлены основные источники ошибок
в цифровом канале: искажения, наличие
импульсных помех, аддитивный шум в
канале и затухание в линии. Как видно,
наличие искажений в канале может быть
связано как с затуханием, так и с
отражением сигнала. Источниками шумов
выступают физически разрушенный кабель
(например, разбитая пара), слишком малое
поперечное сечение, большая распределенная
емкость в кабеле. Другим важным источником
шумов являются интерферирующие импульсы
или импульсные помехи в канале. Источниками
ошибок здесь могут быть силовые кабели,
проложенные в непосредственной близости
от линии связи, нарушение оболочки
кабелей, сигнализация по постоянному
току. Наиболее существенным и многоплановым
фактором влияния на параметры цифрового
канала является наличие аддитивных
шумов различной природы. Источниками
ошибки здесь могут быть нарушение
балансировки кабеля, параметра скручивания
витой пары, интерференция с различными
радиочастотными и СВЧ-сигналами, сигналы
вызова, нарушение полярности кабеля
(перепутанные жилы, короткое замыкание
между жилами и т.д.) Высокий уровень
шумов может привести к значительному
увеличению параметра ошибки.
Цифровые системы
передачи имеют большую по сравнению с
аналоговыми системами помехозащищенность.
Однако закономерность влияния уровня
шума на параметр ошибки справедлива
только для большого отношения сигнал/шум.
Если рассматривать влияние интерференции
на параметры цифрового канала, то эту
закономерность можно схематически
представить графиком рисунок 8. Как
видно из графика, цифровые системы
передачи имеют определенный порог
чувствительности к интерференции, в
отличие от аналоговых систем передачи,
где имеет место прямая зависимость
эффекта влияния интерференции от ее
уровня. Однако влияние интерференции
на параметры цифровых систем передачи
более существенно, и с определенного
уровня эффект этого влияния даже
превышает эффект воздействия на параметры
аналоговых систем.
Рисунок 8 — Влияние
интерференции на параметры аналоговых
и цифровых систем передачи
Наконец, важным
источником шумов в цифровых каналах
является затухание в кабелях и линиях
передачи, причем не только высокий
уровень затухания, но и его неравномерная
характеристика приводят к появлению
субгармоник, вносящих дополнительный
аддитивный шум.
Если рассматривать
источники ошибок не только в канале, но
и в цифровой системе передачи, то можно
выделить внутренние и внешние источники.
К внутренним
источникам ошибок относятся:
-
различная
нестабильность во внутренних цепях
синхронизации цифровых устройств,
дрейф в системе внутренней синхронизации
устройства; -
нестабильность,
связанная с измерением характеристик
электронных компонентов в составе
устройства; -
перекрестные
помехи в цепях устройств; -
нарушения в работе
эквалайзеров и в процессах, связанных
с неравномерностью АЧХ; -
повышение порога
по шуму, связанное с изменением параметров
модулей устройств со временем.
К внешним источникам
ошибок можно отнести:
-
перекрестные
помехи в каналах передачи; -
джиттер в системе
передачи; -
электромагнитная
интерференция (от машин, флуорисцентных
ламп и т.д.); -
нестабильность
источников питания устройств; -
импульсные шумы
в канале; -
механические
повреждения, воздействие вибрации,
плохие контакты; -
деградация
качественных параметров среды передачи
(электрического или оптического кабеля,
радиочастотного канала и т.д.); -
глобальные
нарушения, связанные с разрушением
канала цифровой передачи.
Влияние всех
перечисленных источников ошибок и
интерференции значительно повышается
при снижении параметра отношения
сигнал/шум
Если рассмотреть
влияние интерференции на параметры
качества работы цифровой системы
передачи, можно отметить, что влияние
битовых ошибок отличается для различных
услуг и систем передач в зависимости
от следующих факторов:
-
типа передаваемого
трафика (голос, данные, видео, мультимедиа
и т.д.); -
типа системы
передачи, принципов кодирования и
наличия цепей резервирования передачи
сигнала; -
количества и
частоты битовых ошибок; -
распределения
битовых ошибок (равномерно распределенные
ошибки, ошибки, возникающие пакетами
и т.д.); -
источника
интерференции; -
устойчивости
принятого в системе передачи принципа
передачи цифровой информации к ошибкам; -
устойчивости
принятого в системе передачи принципа
передачи цифровой информации к другим
факторам воздействия (джиттеру,
нестабильности синхронизации и т.д.»)
Основные параметры,
измеряемые в бинарном цифровом канале
Все параметры,
измеряемые в бинарном цифровом канале,
будут встречаться в технологии измерений
цифровых каналов первичной и вторичных
цифровых сетей. Прежде чем рассматривать
технологию измерений параметров
бинарного цифрового канала, необходимо
определить эти параметры. Ниже приведены
основные параметры, измеряемые в бинарном
цифровом канале. Они описаны в соответствии
с сокращениями, используемыми в меню
большинства приборов. В основном это
параметры, используемые для анализа
характеристик бинарного канала согласно
ITU-T рекомендации G.821, G.826 и М.2100.
AS — Availability Seconds —
время готовности канала (с) — вторичный
параметр, равный разности между общей
длительностью теста и временем
неготовности канала.
AS(%) — Availability Seconds —
относительное время готовности канала
— параметр, характеризующий готовность
канала, выраженный в процентах, является
первичным параметром и входит в число
основных параметров ITU-T рекомендации
G.821. Его можно интерпретировать как
вероятностную меру качества предоставляемого
пользователю канала.
ВВЕ — Background Block
Error — блок с фоновой ошибкой — блок с
ошибками не является частью SES, применяется
при анализе ошибок по блокам. Важный
параметр, вошедший в рекомендации ITU-T
G.826.
BIT
или ERR
BIT
— Bit
Errors
— число ошибочных битов — параметр,
используемый при анализе канала на
наличие битовых ошибок и являющийся
числителем в выражении для расчета BER.
Битовые ошибки подсчитываются только
в период пребывания канала в состоянии
готовности.
ЕВ — Error
Block
— число ошибочных блоков — параметр,
используемый при анализе каиала на
наличие блоковых ошибок и являющийся
числителем в выражении для расчета
BLER.
Блоковые ошибки подсчитываются только
в период пребывания канала в состоянии
готовности.
BBER
— Background
Block
Error
Rate
— коэффициент ошибок по блокам с фоновыми
Ошибками — отношение числа блоков с
фоновыми ошибками ко всему количеству
блоков в течение времени готовности
канала за исключением всех блоков в
течении SES.
Параметр входит в рекомендации ITU-T
G.826.
RATE
или BER
— Bit
Error
Rate
— частота битовых ошибок, коэффициент
ошибок по битам — основной параметр в
системах цифровой передачи, равный
отношению числа битовых ошибок к общему
числу бит, переданных за время проведения
теста по каналу, находящемуся в состоянии
готовности. При обнаружении десяти
последовательных секундных интервалов,
сильно пораженных ошибками (SES),
анализатор ИКМ переключается на подсчет
времени неготовности канала. При этом
измерение BER
прерывается до восстановления
работоспособности канала. Таким образом,
управляемые проскальзывания, связанные
с потерей одного или нескольких циклов
информации, практически не влияют на
значение BER.
Измерения параметра BER
универсальны, они не требуют наличия в
потоке Е1 цикловой и сверхцикловой
структуры, однако необходима передача
специальной тестовой последовательности.
Проводятся только при полном или
частичном отключении цифрового канала
от полезной нагрузки.
BLER
— Block
Error
Rate
— частота блоковых ошибок, коэффициент
ошибок по блокам — редко применяемый на
практике параметр, равный отношению
числа ошибочных блоков данных к общему
числу переданных блоков. Под блоком
понимается заданное количество битов.
Ошибочным блоком считается блок,
содержащий хотя бы один ошибочный бит.
Обычно значение параметра BLER
больше (хуже), чем параметра BER.
Его целесообразно измерять только в
тех сетях передачи данных, где информация
передается блоками фиксированного
размера, а параметр BLER
является важной характеристикой канала
с учетом кадровой (цикловой) структуры
передачи. Например, для сетей ATM
принята кадровая структура передачи в
виде кадров длиной 53 бита. Ошибочный
кадр уничтожается (дискартируется). В
этом случае можно считать кадр ATM
блоком длиной в 53 бита, а эквивалентом
BLER
будет параметр ошибки по кадрам CER
(Cell
Error
Rate).
В другом примере в качестве эквивалента
блока может выступать сверхцикл ИКМ, а
эквивалентом BLER
будет ошибка по CRC.
CLKSLIP
или SLIP
— Clock
Slips
— число тактовых проскальзываний —
параметр характеризуется числом
синхронных управляемых проскальзываний,
появившихся с момента начала теста.
Проскальзыванием называется повторение
или исключение группы символов в
синхронной или плезиохронной
последовательности двоичных символов
в результате различия между скоростями
считывания и записи в буферной памяти.
Поскольку проскальзывание ведет к
потере части информации, что в свою
очередь ведет к потере цикловой
синхронизации, на практике используются
эластичные управляемые буферы с
возможностью управления проскальзываниями.
В этом случае проскальзывания называются
управляемыми. В наибольшей степени
параметр CLKSLIP
связан с параметром неготовности канала
(UAS).
Сопоставление CLKSLIP
и UAS
позволяет выявить причину неготовности
канала, в частности, связана ли она с
нарушением синхронизации. Значение
параметра CLKSLIP
зависит от размера имитируемого прибором
буфера, емкостью от 1 бита до нескольких
циклов.
CRC
ERR
— CRC
Errors
— число ошибок CRC
— параметр ошибки, измеренный с
использованием циклового избыточного
кода (CRC),
распространенный параметр определения
ошибок реально работающего канала без
его отключения и без передачи тестовой
последовательности. Данные кода
помещаются в состав сверхцикла ИКМ,
Необходимым условием измерения параметра
CRC
является наличие механизма формирования
кода в аппаратуре передачи. Встроенные
средства самодиагностики большей части
современных цифровых систем передачи
используют именно этот механизм. Таким
образом, при измерении параметра CRC
можно не только оценить частоту ошибок,
но в проверить работу системы
самодиагностики.
При использования
CRC
часто возникает вопрос о необходимости
одновременного измерения и параметра
BER.
Необходимо учитывать две особенности
применения CRC.
Во-первых, каждая ошибка CRC
не обязательно связана с ошибкой одного
бита информации. Несколько битовых
ошибок в одном сверхцикле могут дать
только одну ошибку CRC
для блока Во-вторых, несколько битовых
ошибок могут компенсировать друг друга
и не входить в суммарную оценку CRC.
Таким образом, при использовании CRC
можно говорить не об истинном уровне
ошибок в канале, а только об оценке их
величины. Тем не менее CRC
является удобным методом контроля
ошибок при проведении сервисного
наблюдения за работающим каналом, когда
практически невозможно измерить реальные
параметры битовых ошибок.
CRC
RATE
— CRC
Errors
Rate
— частота ошибок CRC
— показывает среднюю частоту ошибок
CRC.
По описанным выше причинам бывает лишь
частично коррелирован с параметром
BER.
DGRM
— Degraded
Minutes
— число минут деградации качества —
несколько временных интервалов
продолжительностью 60 с каждый, когда
канал находится в состоянии готовности,
но BER=10″‘.
Ошибки во время неготовности канала не
считаются, а интервалы по 60 с в состоянии
готовности канала, пораженные ошибками
несколько раз, суммируются.
DGRM
(%) — Degraded
Minutes
— процент минут деградации качества —
число минут деградации качества,
выраженное в процентах по отношению ко
времени, прошедшему с момента начала
тестирования.
EFS
— Error
Free
Seconds
— время, свободное от ошибок (с), — один
из первостепенных параметров, входящих
в рекомендации G.821
и М.2100/М.550. Отражает время, в течение
которого сигнал был правильно
синхронизирован, а ошибки отсутствовали,
т.е. общее время пребывания канала в
состоянии готовности.
EFS(%)
— Error
Free
Seconds
— процент времени, свободного от ошибок
(с), — то же, что и предыдущий параметр,
только выраженный в процентах по
отношению к общему времени с момента
начала тестирования.
ES
— Errors
Seconds
— длительность поражения сигнала
ошибками, количество секунд с ошибками
(с) — параметр показывает интервал
времени поражения всеми видами ошибок
в канале, находящемся в состоянии
готовности. ES
связан с другими параметрами простым
соотношением: AS
= ES
+ EFS.
ES(%)
— Errors
Seconds
— процент поражения сигнала ошибками
— параметр связан с %EFS
соотношением: %ES
+ %EFS
= %AS.
ESR
— Error
Seconds
Rate
— коэффициент ошибок по секундам с
ошибками — параметр, практически равный
ES(%).
LOSS
— Loss
of
Signal
Seconds
— длительность потери сигнала (с) —
параметр характеризует интервал времени,
в течение которого сигнал был потерян.
PATL
— Pattern
Loss
— количество потерь тестовой
последовательности — параметр
характеризуется числом потерь тестовой
последовательности, появившихся с
момента начала теста.
PATLS
— Pattern
Loss
Seconds
— продолжительность времени потери
тестовой последовательности — общее
время потери тестовой последовательности
с момента начала теста.
SES — Severally Errors Seconds
— продолжительность многократного
поражения ошибками, количество секунд,
пораженных ошибками (с), — интервал
времени, пораженный ошибками несколько
раз, измеряемый в секундах. В это время
частота битовых ошибок составляет
BER>10-3. Подсчет SES производится только
во время готовности канала. Из определения
видно, что SES — составная часть параметра
ES. Вторая интерпретация параметра SES
связана с измерениями по блоковым
ошибкам, тогда SES определяется как
односекунд-ный интервал времени,
содержащий более 30 % блоков с ошибками.
Можно сказать, что во время подсчета
параметра SES, качество канала чрезвычайно
плохое. Параметр SES очень важен и входит
в перечень обязательных к измерению
параметров ИКМ рекомендаций G.821 и
М..2100/М.550.
SES(%) — Severally Errors
Seconds — относительная продолжительность
многократного поражения ошибками — тот
же параметр, выраженный в процентах.
SESR — Severally Error Seconds
Rate — коэффициент ошибок по секундам,
пораженным ошибками — параметр, практически
равный SES(%).
SLIPS или CKSLIPS — Clock
Slips Seconds — продолжительность тактовых
проскальзываний — параметр характеризуется
общим временем с наличием синхронных
управляемых проскальзываний.
UAS — Unavailability Seconds —
время неготовности канала (с) — время
неготовности канала начинает отсчитываться
с момента обнаружения 10 последовательных
интервалов SES и увеличивается после
каждых следующих 10 последовательных
интервалов SES. Счет UAS обычно начинается
с момента потери цикловой синхронизации
или сигнала. Этот параметр связан со
всеми предыдущими параметрами и
определяет стабильность работы цифрового
канала.
UAS(%) — Unavailability
Seconds — относительное время неготовности
канала — предыдущий параметр, выраженный
в процентах.
Тестовые
последовательности
Для организации
измерений с отключением канала
используются генератор и анализатор
тестовой последовательности, подключенные
к разным концам цифрового канала. Эти
приборы синхронизированы по тестовой
последовательности, т.е. анализатор
может предсказать следующее значение
каждого принимаемого бита.
В практике
используются два типа тестовых
последовательностей — фиксированные и
псевдослучайные (ПСП, PRBS — Pseudorandom Binary
Sequence). Фиксированными являются
последовательности чередующихся
повторяемых комбинаций битов. В качестве
примера рассмотрим альтернативную
фиксированную последовательность типа
1010, в которой после каждого 0 идет 1.
Процедура синхронизации тестовой
последовательности в этом случае может
быть чрезвычайно проста: анализатор
заранее запрограммирован на ожидание
альтернативной последовательности.
При приеме 1 он предсказывает появление
в качестве следующего бита 0, и в случае
приема 1 делается вывод о битовой ошибки.
Реальная процедура синхронизации
несколько сложнее, поскольку требуется
проверка, не является ли первый принятый
бит ошибочным. Для этого проверяется
правильность синхронизации в течение
нескольких последовательных групп
битов (блоков), при этом сама процедура
синхронизации аналогична. Такая процедура
синхронизации не указывает на начало
цикла.
При фиксированной
тестовой последовательности с указанием
начала цикла, начало цикла задается
специальным битом или последовательностью
битов (далее называется бит f).
В практике могут
использоваться обе процедуры синхронизации
тестовой последовательности. В последнее
время производители склоняются к
внедрению процедуры с указанием начала
цикла, поскольку в этом случае синхронизация
тестовой последовательности осуществляется
в течении нескольких циклов — порядка
8-16 переданных битов. Исключение составляют
постоянные фиксированные последовательности
0000 и 1111, где процедура с указанием начала
цикла не имеет смысла.
В современной
практике используются следующие
фиксированные тестовые последовательности:
1111 — все единицы —
фиксированная последовательность
используется обычно для расширенного
и стрессового тестирования канала.
Например, если последовательность
послана в неструктурированном потоке
Е1, то это будет понято как сигнал
неисправности (AIS).
1010 — альтернативная
— фиксированная последовательность из
чередующихся нулей и единиц.
Последовательность может передаваться
без указания или с указанием начала
цикла -f 0101 0101.
0000 — все нули —
фиксированная последовательность
используется обычно для расширенного
и стрессового тестирования канала.
FOX — фиксированная
последовательность FOX используется в
приложениях передачи данных.
Последовательность в ASCII переводится
как «Quick brown fox.». Синхронизация
последовательности осуществляется
правильным переводом предложения. Ниже
приведена последовательность:
2А, 12, А2, 04, 8А, АА,
92, С2, D2, 04, 42, 4А, F2, ЕА, 72, 04, 62, F2, 1А, 04, 52, АА,
В2, ОА, СА, 04, F2, 6А, А2, 4А, 04, 2А, 12, А2, 04, 32, 82,
5А, 9А, 04, 22, F2, Е2, 04, 8С, 4С, СС, 2С, АС, 6С, ЕС,
1C, 9С, ОС, ВО, 50
1-3 — одна единица
на три бита — промышленный стандарт 1 в
3 последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 010.
1-4 — одна единица
на три бита — промышленный стандарт 1 в
4 последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 0100.
1-8 — одна единица
на восемь битов — промышленный стандарт
1 в 8 последовательностях используется
для расширенного и стрессового
тестирования канала. Последовательность
передается с указанием на начало цикла:
f 0100 0000.
3-24 — три единицы
на 24 бита — промышленный стандарт 3 в 24
последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 0100 0100 0000
0000 0000 0100.
Кроме перечисленных
стандартных фиксированных последовательностей
могут использоваться произвольные
слова и предложения. Процедура
синхронизации и анализа битовых ошибок
может быть организована на основе
указания на начало цикла или на основе
проверки правильности перевода слов и
предложений. Вторая процедура наиболее
часто используется в практике.
Использование
фиксированных последовательностей
рекомендовано главным образом для
стрессового тестирования аппаратуры
кодирования/декодирования. Поэтому
наиболее часто используются тестовые
последовательности со множеством нулей.
Как известно, при передаче двоичной
последовательности наличие
последовательности из нескольких нулей
равносильно отсутствию сигнала (0 обычно
передается сигналом нулевой амплитуды).
В результате генерации последовательностей
со множеством нулей можно проанализировать
работу канала в случае естественного
пропадания сигнала.
Например, в
системах ИКМ (поток Е1) в недавнем прошлом
использовался линейный код AMI, в котором
от-сутствуem устойчивость битовой
синхронизации при появлении длинных
последовательностей нулей. В результате
необходим анализ частоты сбоев битовой
синхронизации измеряемого канала с
кодированием AMI. Для измерений обычно
используются промышленные стандарты
с длинными последовательностями нулей
— 1-4, 1-8 или 3-24. Длинная последовательность
нулей в этом случае создает возможность
сбоя битовой синхронизации, фиксируемого
как битовые ошибки при передачи единиц.
Неустойчивость
битовой синхронизации в случае появления
длинных последовательностей нулей
кодирования AMI было преодолено в
современном коде HDB3 ИКМ-систем, где
используется процедура инверсии шестого
нуля в алгоритме кодирования.
Работоспособность этой процедуры можно
проверить при помощи промышленных
стандартов с длинными последовательностями
нулей — 1-4, 1-8 или 3-24. Кроме того, стабильность
битовой синхронизации может быть
проверена генерацией последовательности
0000.
Вторым направлением
стрессового тестирования является
анализ систем передачи с заполнением.
Например, в некоторых
ИКМ-системах при организации транзита
сбой на удаленном конце приводит к тому,
что поток Е1 заполняется единицами. Эта
процедура используется для имитации
сбоя: передатчик генерирует
последовательность 1111 и анализирует
сигнал AIS, передаваемый принимающей
стороной.
Наличие систем с
заполнением требует с особенной
осторожностью использовать при измерениях
фиксированные последовательности. В
некоторых случаях фиксированная
последовательность может совпадать с
последовательностью заполнения, что
может привести к ошибочным результатам.
Известен случай
анализа спутникового канала по параметру
ошибки (ВЕR), при этом использовалась
альтернативная последовательность
1010, которая совпала с последовательностью
заполнения выходного канала передачи
данных от модема. В результате даже
после пропадания радиочастотного
спутникового канала анализатор выдавал
результат по параметру ошибки BER=10-5
Чтобы избежать
подобных ситуаций, рекомендуется
использовать фиксированные
последовательности в виде слов или
предложений (например, применение
последовательности FOX в описываемом
примере сразу идентифицировало
неготовность канала) или псевдослучайной
последовательности (ПСП).
Псевдослучайные
последовательности характеризуются
количеством регистров сдвига, используемых
при генерации N с длинной цикла
последовательности L=2N
— 1. Структура псевдослучайной
последовательности связана со схемой
генератора ПСП, представленной на
рисунке 9.
Рисунок 9 — Генератор
псевдослучайной последовательности
В основе принципа
работы генератора ПСП лежит процедура
сверточного кодирования с использованием
N регистров сдвига с одной обратной
связью перед регистром N. Это экви
валентно кодеру сверточного кодирования
с полиномом Dn+Dn+1+l.
Соответственно длина кодированной
последовательности зависит от количества
регистров сдвига и составляет 2N-L
Процедура предусматривает циклическое
повторение последовательности через
2N-1
тактовых импульсов (эквивалентно,
битов). Большее количество регистров
определяет меньшую повторяемость
последовательности.
Для анализа
принимаемой ПСП используются два типа
анализаторов, схемы которых представлены
на рис. 6.5 и 6.6. Наиболее часто используется
метод анализа ПСП с обратной связью
(рис. 10). В этом случае последовательность
синхронизируется следующим образом:
петля обратной связи размыкается, данные
загружаются в регистры сдвига до полного
заполнения, затем петля обратной связи
замыкается и производится синхронизация
по тестовой последовательности. Две
несинхронные ПСП имеют относительный
параметр BER приблизительно равный 0,5,
таким образом, для достижения синхронизации
по тестовой последовательности критерий
синхронизации выбирается ниже этого
значения.
Рисунок 10 — Анализатор
ПСП с замкнутой обратной связью, метод
побитового измерения ошибок
Рисунок 11 — Анализатор
ПСП без обратной связи
Вторым методом
построения анализатора ПСП является
метод без обратной связи (рис. 11). Этот
метод в настоящее время практически не
используется и признан устаревшим.
Основным недостатком его является
наличие процессов подавления данных
при измерениях каналов с высоким
параметром ошибки. Метод был разработан
для низкого параметра ошибки в
предположении, что сами ошибки возникают
случайным образом и описываются
нормальным распределением.
Современные системы
передачи используют алгоритмы кодирования
и принципы передачи, приводящие к
появлению всплесков ошибок, возникающих
в виде пакетов. В этом случае алгоритм
анализа без обратной связи характеризует
нестабильную работу.
В дальнейшем при
описании анализа ПСП будем исходить из
принципов анализа с обратной связью.
В современной
практике используются следующие типы
псевдослучайных последовательностей:
2е23 — стандартная
2е23-1
псевдослучайная последовательность
битов. Сигнал формируется из 23-фазного
регистра сдвига без ограничения нулей.
Эта последовательность соответствует
техническому стандарту ITU 0.151. Получила
распространение для тестирования
высокоскоростных цифровых каналов
первичной сети (например, каналов SDH).
2е20 — стандартная
2е20-1
псевдослучайная последовательность
битов. Сигнал формируется из 20-фазного
регистра сдвига без ограничения нулей.
Эта последовательность соответствует
техническому стандарту ITU 0.151.
2е15 — стандартная
2е15-1
псевдослучайная последовательность
бит. Сигнал формируется из 15-фазного
регистра сдвига без ограничения нулей.
Последовательность может содержать до
14 нулей в строке. Последовательность
получила наиболее широкое распространение
для анализа каналов PDH с относительно
невысокой скоростью передачи.
20ITU — стандартная
2е20-1
псевдослучайная последовательность
бит. Сигнал формируется из 20-фазного
регистра сдвига без ограничения нулей.
Последовательность соответствует
техническому стандарту ITU 0.153. Однако,
эта последовательность отличается от
2е20 последовательности, потому что
используются разные механизмы обратной
связи. 20ITU подавляет последовательности
из более чем 18 нулей, в отличие от 14 нулей
в 2е20.
2047 — короткая ПСП.
Сигнал формируется из 11 -фазного регистра
сдвига без ограничения нулей. Стандартный
2047-битный код используется для анализа
вторичных сетей передачи данных,
приложений DDS и ISDN.
511 — короткая ПСП.
Сигнал формируется из 9-фазного регистра
сдвига без ограничения нулей. Стандартный
511-битный код применяется для анализа
вторичных сетей передачи данных, в
частности он соответствует техническому
стандарту ITU V.52.
127 — короткая ПСП.
Сигнал формируется из 7-фазного регистра
сдвига без ограничения нулей. Стандартный
127-битный код используется для анализа
низкоскоростных каналов передачи данных
(например, модемных каналов).
63 — самая короткая
ПСП, применяемая в практике измерений.
Сигнал формируется из 6-фазного регистра
сдвига без ограничения нулей. Стандартный
63-битный код применяется для анализа
низкоскоростных каналов передачи данных
(например, модемных каналов).
Таким образом,
основными характеристиками ПСП являются:
-
длина последовательности
в битах; -
вид полинома,
соответствующая конфигурация регистров
генератора и анализатора ПСП; -
спектральный
состав сигнала, зависящий от скорости
передачи в канале.
Спектральный
состав псевдослучайной последовательности
схематически представлен на рис. 6.7.
В зависимости от
скорости передачи данных в канале
используются ПСП различной длины: чем
больше скорость, тем большая длина
последовательности допускается.
Рекомендация ITU-T 0.151 определяет значения
используемых длин ПСП в зависимости от
скорости цифровой передачи в канале
согласно таблице 1. Кроме того существует
также рекомендация по выбору тестовой
последовательности для канала 64 кбит/с
— 211-1,
приведенная в ITU-T рекомендация 0.152.
Рисунок 12 —
Спектральный состав ПСП с кодированием
NRZ
Таблица
1 — Длины тестовых последовательностей
ПСП (ITU-T рекомендация О.151)
|
Скорость передачи, |
Длина ПСП |
Конфигурация
кодера |
Спектральное
∆f, |
|
64 |
215-1 |
D15+D-14+1=0 |
1,95 |
|
2048 |
215-1 |
D15+D-14+1=0 |
62,5 |
|
8448 |
215-1 |
D15+D-14+1=0 |
257,8 |
|
34368 |
223-1 |
D23+D-18+1=0 |
4,1 |
|
139264 |
223-1 |
D23+D-18+1=0 |
16,6 |
Основным требованием,
предъявляемым к спектральному расстоянию
∆f,
является возможность успешной
синхронизации при наличии на приемной
стороне относительно узкополосной цепи
синхронизации от входящего потока. В
этом случае требуется малое расстояние
между двумя субгармониками принимаемого
сигнала. При большом расстоянии может
возникнуть джиттер регистров сдвига.
Механизм возникновения джитnера довольно
простой: длинная последовательность
нулей, характерная для ПСП большой
длины, приводит к накоплению фазовой
ошибки за время ее передачи. Такой
джиттер обусловлен алгоритмом работы
генератора ПСП, его структура зависит
от конфигурации генератора, кроме того,
джиттер регистров сдвига в общем случае
отличается по параметрам от джиттера
в цифровом канале.
Чтобы избежать
появление джиттера регистров сдвига
используются рекомендованные ПСП.
3.2 Методы
вычисления параметров ошибок в цифровых
каналах.
Параметр ошибки
по битам BER по праву считается основным
параметром тестирования любых цифровых
каналов и систем. Параметр BER связан
интегральным соотношением с функцией
распределения вероятности возникновения
ошибки в цифровом канале. Таким образом,
параметр ВЕR
является наиболее распространенной
статистической характеристикой
параметров качества работы канала. По
отношению к измеряемым величинам этот
параметр является вторичным и вычисляется
на основании данных о количестве
принимаемых ошибок в тестовой
последовательности в различные периоды
времени, поэтому необходимо говорить
о методах расчета параметра BER по данным
о количестве ошибок.
Существует несколько
алгоритмов анализа ошибок в принимаемом
потоке с ПСП. Рассмотрим, как по данным
об ошибках рассчитывается параметр
BER. На рисунке 13 представлены три основных
алгоритма такого расчета.
Рисунок 13 — Методы
измерения параметра BER
Известно, что в
процессе измерения существует две точки
синхронизации измерений: начало измерения
и время, при котором достигается заданный
порог ошибки (на рисунке -100 ошибок).
Выбор параметра ERR = 100 основан на
предположении нормального распределения
возникновения ошибок. В этом случае
относительная погрешность измерений
определяется как:
![]()
где N—
количество ошибок.
Учитывая, что для
большей части эксплуатационных измерений
относительная погрешность в 10 % является
вполне допустимой, в качестве границы
интервала синхронизации может быть
выбрано время ERR = 100. Таким образом, все
время измерений разбивается на два
интервала, от начала измерений до точки
ERR=100 и после этой точки. Соответственно
различаются три метода подсчета BER.
Первый метод
предусматривает расчет отношения ВЕR
после приема первых 100 ошибок, что
автоматически гарантирует высокую
точность измерения (лучше 10%). Однако от
начала измерения до получения результата
необходимо некоторое (иногда достаточно
большое) время.
Второй метод
предусматривает расчет отношения
непосредственно после начала измерения
без привязки к количеству принятых
ошибок по битам. В этом случае для
обеспечения точности измерений расчет
отношения делается после приема
определенного количества битов (на
рисунке — 106),
а точность измерения определяется
пороговым значением количества принятых
битов. Обычно предполагается, что
точность на порядок хуже обратного
значения количества принятых битов (на
рисунке 13 точность измерения BER = 10-5
сразу после начала расчета отношения).
В отличие от первого метода этот метод
обеспечивает определенное время начала
отображения результата измерений. С
точки зрения алгоритма проведения
эксплуатационных измерений по параметру
ошибки, многие из которых носят иногда
оценочный характер, такая методика
подсчета является наиболее эффективной
и получила наибольшее распространение.
Отрицательной стороной методики является
необходимость учета количества
переданных/принятых битов ПСП при
анализе результата, поэтому отношение
вычисляется математически без указания
точности измерений в каждый конкретный
момент. Например, если прибор показывает
BER = 10-12
при общем количестве принятых битов
108,
то необходимо констатировать — измерение
параметра BER лучше 10-7,
но не более, поскольку этим значением
ограничена точность измерения. В первом
методе такой ситуации не может возникнуть,
поскольку измерение делается заведомо
с точностью 10 % и лучше.
Наконец, третий
метод, используемый в некоторых
индикаторах, предусматривает вычисление
BER точно после приема 100 ошибочных битов.
Этот метод является модификацией первого
метода со свойственными ему негибкостью
в отображении результатов эксплуатационных
измерений и необходимостью ожидания
до индикации результата.
Таким образом,
наибольшее распространение в современной
практике получил второй метод, однако
он обычно не обеспечивает автоматического
учета точности измерений, что необходимо
при проведении эксплуатационных тестов.
Вторым наиболее
часто используемым параметром при
анализе цифровых каналов является
количество секунд, пораженных ошибками
(ES). Этот параметр является вторым по
важности после BER. Если параметр BER
определяет средний интегральный уровень
качества цифровой передачи в канале,
то параметр ES и, в особенности, обратный
к нему параметр EFS, определяют долю
общего времени, в течении которого канал
является свободным от ошибок, т.е. время,
в течении которого оператор гарантирует
бесперебойную цифровую передачу по
каналу. Таким образом, этот параметр
является крайне важным для операторов
цифровых систем передачи первичной и
вторичных сетей. Параметр ES вошел во
все основные рекомендации и нормы на
параметры цифровых каналов (например,
в рекомендации ITU-T G.821, G.826 и М.2100).
По отношению к
измеряемому параметру — количеству
принятых ошибочных битов — параметр ES
также, как и параметр BER является
вторичным. Метод его подсчета тесно
связан с определениями, даваемыми этому
параметру в европейской (одобренной
ITU-T) и американской практиках.
В европейской
практике параметр EFS определяется как
все односекундные интервалы времени,
не содержащие ошибок в течении интервала
измерений. С точки зрения методики
подсчета ES это определение означает
использование асинхронного метода
(рис. 13). Асинхронный метод предусматривает
разделение всего времени измерений на
интервалы по 1 с и подсчет количества
интервалов, в течении которых принималась
одна или несколько битовых ошибок.
В американской
практике измерений получил распространение
метод синхронного подсчета ES, согласно
которому секундой, пораженной ошибками,
называется односекундный интервал,
следующий за появлением ошибки. В
результате измерение параметра ES
синхронизируется со временем появления
ошибок.
Как видно из рисунка
14, применение двух описанных методов к
реальной ситуации дает различные
результаты. Точный анализ показывает,
что методы дают близкие результаты
только в предположении малого параметра
ES и нормальной функции распределения
вероятности возникновения ошибки. В
случае возникновения ошибок в виде
пакетов разница в параметрах, измеренных
разными методами, может достигать 18%.
Проведенные рабочими группами ITU-T
исследования показали, что большая
часть цифровых систем передачи (в
особенности радиочастотные системы
передачи с различными методами
помехозащищенного кодирования) при
работе дают именно пакетное распределение
ошибок.
Рисунок 14 — Методы
подсчета параметра ES
Каждый метод имеет
свои преимущества и недостатки.
Преимуществом асинхронного метода
измерения является простота его
реализации в конкретных приборах, а
метода синхронного подсчета — его
инвариантность относительно выбора
времени начала измерения, что приводит
к следующим важным следствиям:
-
результаты,
измеренные разными приборами одновременно
на одном канале, точно совпадают; -
результаты,
полученные при измерениях в различных
частях цифрового канала, точно совпадают
при условии, что канал не вносит
дополнительных ошибок; -
результаты,
полученные методом синхронного подсчета,
более отражают смысл измерения ES как
общего времени негарантированной
цифровой передачи, и могут использоваться
операторами для гибкого регулирования
тарифной политики и т.д.
Таким образом,
использование метода синхронного
подсчета параметра ES представляет
оборудование систем передачи в более
выгодном свете, однако результаты таких
измерений являются инвариантными ко
времени начала теста и учитывают
возможное распределение ошибок в виде
пакетов.
Основным недостатком
синхронного метода подсчета параметра
ES является вторичное значение другого
важного параметра — EFS. Действительно в
контексте методологии синхронного
измерения ES параметр EFS невозможно
определить явно, а только как производную
параметра ES.
Для проведения
измерений без отключения цифрового
канала используются алгоритмы анализа
избыточного циклового кода. Алгоритм
такого анализа представлен на рисунке
15.
Рисунок 15 — Алгоритм
использования избыточного циклового
кода
Алгоритм использования
избыточного циклового кода следующий:
информационный поток, передаваемый
затем по цифровому каналу, разбивается
на несколько блоков данных фиксированного
размера. Для каждого блока данных
последовательность битов делится на
полином заданного вида (в зависимости
от типа кода). В результате деления
образуется остаток, передаваемый вместе
с блоком данных в составе цикла (кадра)
в канале. Процедура деления потока
данных на блоки и передача их с рассчитанным
остатком от деления приводит к
необходимости использования в аппаратуре
передачи цикловой структуры. Таким
образом, измерения параметров ошибки
без отключения канала возможны только
для систем передачи с цикловой структурой.
Остаток от деления передается в составе
цикла в виде контрольной суммы. На
приемной стороне делаются аналогичные
вычисления остатка от деления, результат
расчета сравнивается с переданной
контрольной суммой. Расхождение
результатов свидетельствует о наличии
битовой ошибки в блоке.
При такой методологии
блок анализируется в целом. В блоке
регистрируется только одна ошибка,
остальные ошибки в составе этого блока
не локализуются. Кроме того, допустима
компенсация ошибок друг другом. Как
следствие, параметры BER и CRC ERR при
измерениях могут не совпадать друг с
другом. Точность измерений без отключения
канала параметра ошибки эквивалентна
измерениям BLER и зависит не от количества
переданных битов, а от количества
переданных блоков, т.е. точность измерений
ниже.
Единственным и
главным преимуществом методики измерения
без отключения канала является возможность
измерения на реально работающем канале.
Для эксплуатационного Мониторинга
качества цифровых систем передачи
возможность таких измерений очень
важна, что и обусловило широкое
распространение этой методологии
измерений. В настоящее время именно
такие алгоритмы измерений используются
во встроенных системах самодиагностики
современных цифровых систем передачи
и во вторичных сетях передачи данных.
В зависимости от типа цикловой структуры
используются различные типы цикловых
кодов, некоторые из которых представлены
в табл. 2.
Таблица 2 — Основные
типы кодов, используемые для измерения
параметра ошибки без отключения каналов
|
Тип кода |
Полином кода |
Количество битов |
Использование |
|
CRC-6 |
Х6+Х+1 |
6 |
DS1 |
|
CRC-4 |
Х4+Х+1 |
4 |
Е1 |
|
CRC-16 |
Х16+Х12+ |
16 |
HDLC, |
|
CRC-32 |
Х32+Х26+Х23+Х22+
Х16+Х12+Х11+Х10+Х8+ |
32 |
SMDS, |
Помимо алгоритма
подсчета параметров ошибок в цифровом
канале на результаты измерений может
оказывать существенное влияние время
проведения измерений, причем как
длительность этого времени, так и выбор
времени проведения тестов по отношению
к трафику сети.
Проблемы выбора
параметров длительности проведения
тестов связаны с необходимостью
объективации результатов измерений.
Действительно, при анализе параметров
многоканальной системы передачи, в
которой для измерений задействована
лишь часть емкости, возникают два
основных вопроса: «Действительно ли
измеренные параметры соответствуют
всей системе передачи или только каналу,
в котором проводятся измерения?» и
«Будут ли сохраняться результаты
.измерений постоянными в течении суток?».
Предположим, что
в течении определенного времени
проведения измерения в цифровом канале
зарегистрировано количество N ошибок.
Для оценки достоверности измерений
обычно используется статистическая
модель со случайным возникновением
ошибок, т.е. рассчитывается коэффициент
достоверности результата как среднее
отклонение от измеренной величины.
Коэффициент достоверности позволяет
оценить реальный параметр ошибки в
предположении наихудшего варианта и
широко используется в методологии
измерений цифровых каналов.
Обязательными элементами современных сетей связи являются системы сетевого управления, с помощью которых решаются такие задачи, как реконфигурация сети, непрерывный мониторинг параметров системы связи (например, SIP GSM шлюзов), фиксация аварийных состояний, защитные переключения, хранение и обработка результатов мониторинга и т. д. Все указанные операции выполняются, как правило, автоматически, с помощью встроенных аппаратных и программных средств.
В то же время зачастую при обслуживании сетей связи не удается обойтись без ручных операций с применением портативных измерительных приборов. Классический пример – устранение сложных повреждений металлических кабелей связи, случившихся по причине намокания.
АНАЛИЗ ОШИБОК В ЦИФРОВЫХ СИСТЕМАХ ПЕРЕДАЧИ
Основное преимущество цифровой передачи по сравнению с аналоговой заключается в отсутствии накопления помех вдоль линии. Это достигается за счет восстановления формы передаваемого сигнала на каждом регенерационном участке.
Все факторы, от которых зависит длина участка, можно разделить на внутренние и внешние.
Наиболее важными внутренними считают затухание линии, межсимвольные помехи, нестабильность тактовой частоты системы, вариацию задержки, возрастание уровня шумов вследствие старения системы.
К существенным внешним факторам обычно относят переходные и импульсные помехи, внешние электромагнитные влияния, механические повреждения контактов при вибрации или ударах, ухудшение свойств передающей среды вследствие перепадов температуры.
Все они обычно предопределяют ухудшение самого чувствительного к ошибкам параметра цифровой передачи — соотношения сигнал/шум. Действительно, снижение величины данного соотношения всего на 1 дБ приводит к увеличению обобщенного параметра качества цифровых систем передачи, которым является коэффициент битовых ошибок (Bit Error Rate, BER), по крайней мере на порядок.
Согласно определению, BER представляет собой отношение числа ошибочно принятых битов к общему числу принятых битов. Его величина статистически колеблется около значения среднего коэффициента ошибок за длительный промежуток времени. Разница между непосредственно измеренным коэффициентом ошибок и долговременным средним значением зависит от числа контролируемых бит и тем самым от длительности измерения.
База времени формируется при помощи двух основных методов.
В соответствии с первым из них, на принимающем конце задается фиксированное число наблюдаемых бит и регистрируется соответствующее число бит с ошибками.
Например, если число ошибочно принятых бит оказалось равным 20, а заданное общее число принимаемых бит – 106, то коэффициент ошибок составит 20/106 = 20 x 10-6 = 2 x 10-5 .
Достоинством такого подхода является точно известное время измерения, а недостатком – невысокая надежность измерения при малом числе ошибок.
Согласно второму методу, время измерений определяется заданным числом ошибок. Измерение длится до тех пор, пока, например, не будет зафиксировано 100 ошибок. Затем на основании соответствующего числа битов данных вычисляется коэффициент ошибок.
Его недостаток заключается в том, что неизвестно время измерений, которое при малых коэффициентах ошибок может оказаться очень большим. Кроме того, вполне возможно, что счетчик бит данных заполнится полностью, и измерения прекратятся. Поэтому такой способ используется редко.
На начальном этапе развития цифровых систем передачи они применялись главным образом для передачи аналогового телефонного сигнала, и потому требования к качеству цифровых систем передачи определялись характеристиками этого сигнала.
Ошибка в цифровом сигнале приводит к быстрому изменению величины сигнала АИМ на входе канального демодулятора, и абонент слышит неприятный щелчок на выходе канала ИКМ. Экспериментально установлено, что заметные щелчки возникают только при ошибках в одном из первых двух наибольших по весу символов кодовой группы, что соответствует максимальному (положительному или отрицательному) изменению сигнала АИМ. Качество связи считается удовлетворительным, если в каждом канале наблюдается не более одного щелчка в минуту. При частоте дискретизации, равной 8 кГц, по каналу передается 8000 x 60 = 480 тыс. кодовых групп в минуту, причем опасными в отношении щелчков являются 960 тыс. старших разрядов. Если считать, что вероятность ошибки для любого разряда кодовой группы одинакова, то при допущении одного щелчка в минуту вероятность ошибки в линейном тракте не должна быть более 1/960 000 = 10-6.
С учетом передачи данных, которая более чувствительна к ошибкам передачи, для эталонного международного соединения протяженностью 27 500 км величина BER не должна превышать 10-7.
Ошибки можно обнаружить двумя основными методами.
Во-первых, во время приемки и настройки линий связи, поиске неисправностей и ремонте выполняются измерения с перерывом связи, которые реализуются по трем схемам подключения: точка-точка, шлейф и транзит.
Во-вторых, для мониторинга сети и качественной оценки ее состояния, обнаружения и устранения повреждений используются измерения без перерыва связи.
Измерение BER без перерыва связи требует точного знания структуры цифрового сигнала. Таким сигналом в составе цикла, например первичного цифрового сигнала Е-1, является цикловой синхросигнал, занимающий 7 бит нулевого канального интервала (КИ) сигнала E-1.
Цикловой сигнал передается в каждом втором цикле сигнала E-1, причем каждый цикл E-1 содержит 32 КИ и, следовательно, 32 х 8 = 256 бит. Таким образом, относительная доля циклового синхросигнала в сигнале E-1 составляет 7/(256 x 2) < 1,4%. Поэтому достоверность оценки BER с помощью циклового синхросигнала очень низка.
Еще один известный метод оценки качества цифровой передачи основан на обнаружении ошибок кода. Он используется, например, в цифровых трактах T-1/E-1, где применяются коды с чередованием полярности единиц AMI и HDB-3. Однако с помощью измерителя ошибок кода нельзя выявить истинное значение коэффициента битовых ошибок. Отклонения между результатами измерения ошибок кода и обычного измерения ошибок методом побитового сравнения становятся особенно заметными при коэффициентах ошибок более 10-3. Кроме того, нарушение правил кодирования часто распространяется и на нескольких бит, находящихся после бита с ошибкой. Вследствие этого зависящее от содержания сигнала смещение и погрешность при больших коэффициентах ошибок делают невозможным точный анализ распределения ошибок.
Итак, практическая оценка BER возможна только в режиме измерений с перерывом связи и посылкой эталонных испытательных сигналов. При измерении BER испытательный сигнал должен как можно лучше имитировать реальный, т. е. иметь случайный характер. В качестве такого испытательного сигнала обычно используют псевдослучайную последовательность битов (ПСП) с заданной структурой, близкой к настоящему информационному сигналу. Такие последовательности формируются тактируемыми регистрами сдвига с обратной связью.
Цифровой испытательный сигнал заменяет обычно передаваемый информационный сигнал и оценивается на приемном конце измерителем ошибок.
Таким образом, необходимый в условиях нормальной эксплуатации непрерывный мониторинг ошибок цифровой передачи методом BER без перерыва связи практически невозможен.
В настоящее время для оценки качества цифровых систем передачи в эксплуатационных условиях применяется метод измерения блочных ошибок. Как нетрудно догадаться, главное его достоинство состоит в том, что он основан на использовании самого информационного сигнала и выполняется без прерывания связи.
Все методы измерения блочных ошибок предполагают введение избыточности в информационный сигнал, обработку этого вспомогательного сигнала по определенному алгоритму и передачу результата обработки на принимающую сторону, где принятый сигнал обрабатывается по тому же алгоритму, что и при передаче, а итог сравнивается с результатом обработки, полученным от передающей стороны. При их разнице переданный блок считается ошибочным.
Известно несколько способов обнаружения блочных ошибок. Способы поблочного контроля четности и контрольной суммы не позволяют распознать все типы ошибок, тем самым ограничивая их практическую применимость. Пожалуй, единственным универсальным способом измерения ошибок без перерыва связи является контроль при помощи циклического избыточного кода (Cyclical Redundancy Check, CRC).
�
Таблица 1. Измерения в цифровых системах связи и соответствующие им процедуры могут применяться для решения целого ряда задач.
| Область применения измерений | Измерительные процедуры |
| Разработка оборудования | Испытания с применением высокоточного контрольно-измерительного оборудования, отработка и проверка программного обеспечения, анализ результатов |
| Производство оборудования | Оперативные измерения параметров оборудования и сравнение их с эталонными, проверка дистанционного управления, контроль комплектующих изделий |
| Инсталляция и линейные испытания оборудования | Измерения с перерывом связи, долговременный анализ, сохранение результатов, использование высокоточных и стандартных приборов |
| Нормальная эксплуатация и техническое обслуживание при поиске и устранении неисправностей | Измерения с перерывом и без перерыва связи, включая непрерывный мониторинг с помощью встроенных систем тестирования и измерения с помощью стандартных приборов, имитация ошибок и аварийных сигналов, контроль качества каналов |
| Ремонт и калибровка — локализация дефектов монтажа и печатных плат, имитация условий эксплуатации | Лабораторное оборудование для проверки на соответствие нормативной документации, испытательные стенды |
Дата введения 1975-07-01
ВВЕДЕН В ДЕЙСТВИЕ постановлением Государственного комитета стандартов Совета Министров СССР от 29 марта 1974 г. N 748
ПРОВЕРЕН в 1985 г. Постановлением Госстандарта от 19.06.85 N 1723 срок действия продлен до 01.07.90*
_________________
* Ограничение срока действия снято по протоколу N 4-93 Межгосударственного Совета по стандартизации, метрологии и сертификации (ИУС N 4, 1994 г.). — Примечание.
ПЕРЕИЗДАНИЕ (декабрь 1985 г.) с Изменениями N 1, 2, утвержденными в октябре 1980 г., июне 1985 г. (ИУС 12-80, 9-85).
ВНЕСЕНО Изменение N 3, утвержденное и введенное в действие Постановлением Государственного комитета СССР по управлению качеством продукции и стандартам от 14.12.89 N 3721 с 01.06.90
Изменение N 3 внесено юридическим бюро «Кодекс» по тексту ИУС N 3, 1990 г.
Настоящий стандарт распространяется на каналы передачи данных (ПД), работающие в синхронном режиме со скоростями до 9600 бит/с включительно, и устанавливает методы измерений следующих параметров:
коэффициента эффективности (технической пропускной способности) канала ПД;
своевременности поступления данных из канала ПД;
коэффициента ошибок по элементам дискретного канала;
коэффициента ошибок по блокам дискретного канала;
коэффициента необнаруженных ошибок канала ПД;
краевых искажений.
В настоящем стандарте учтены рекомендации МККТТ V50-V53.
Методы измерений коэффициента эффективности и своевременности поступления данных из канала ПД распространяются на каналы с решающей обратной связью (РОС) с последовательной передачей блоков (знаков) данных с блокировкой, с ожиданием сигнала обратной связи при однократной передаче и с накоплением правильно принятых блоков (знаков).
В зависимости от типа конкретной системы ПД допускается измерять только часть указанных параметров.
Значения, определяемые приведенными в настоящем стандарте методами измерений, представляют собой индивидуальные значения для каждого измеряемого параметра.
Определения терминов, применяемых в настоящем стандарте, приведены в справочном приложении 1.
(Измененная редакция, Изм. N 1, 2).
1. ИЗМЕРЕНИЕ КОЭФФИЦИЕНТА ЭФФЕКТИВНОСТИ КАНАЛА ПД ПО СИГНАЛАМ «ПЕРЕСПРОС» И ВРЕМЕНИ ЦИКЛОВОГО ФАЗИРОВАНИЯ
1.1. Аппаратура
1.1.1. Счетное устройство (СУ), электрические параметры входных цепей которого на стыке с устройством защиты от ошибок (УЗО) должны соответствовать требованиям ГОСТ 23675-79 или ГОСТ 18146-72.
Объем счетчика должен определяться конкретно для каждого канала ПД.
1.1.2. Измеритель времени циклового фазирования (ИВФ), электрические параметры входных цепей которого на стыке с УЗО должны соответствовать требованиям ГОСТ 23675-79 или ГОСТ 18146-72.
Объем счетного устройства ИВФ должен определяться конкретно для каждого УЗО.
1.1.1, 1.1.2. (Измененная редакция, Изм. N 3).
1.1.3. Генератор испытательного сигнала (ГИС 1), электрические параметры входных и выходных цепей которого на стыке с УЗО должны соответствовать требованиям ГОСТ 23675-79 или ГОСТ 18146-72.
Тест должен состоять из 511-элементной рекуррентной последовательности. В технически обоснованных случаях может быть использован тест другого вида.
Скорости и алгоритмы работы определяются аппаратурой ПД (УЗО) и устройством преобразования сигналов (УПС).
(Измененная редакция, Изм. N 1, 3).
1.2. Подготовка к измерению
1.2.1. Структурная схема измерения приведена на черт.1.
Черт.1
(Измененная редакция, Изм. N 1).
1.3. Проведение измерений
1.3.1. В канал ПД подают данные либо тест, вырабатываемый генератором испытательного сигнала (ГИС 1).
(Измененная редакция, Изм. N 1).
1.3.2. При наличии ошибок в блоках (знаках) данных приемник УЗО выдает сигнал «переспрос».
1.3.3. Сигналы «переспрос» подсчитываются устройством СУ за сеанс измерения.
1.3.4. При наличии циклового фазирования УЗО выдает сигналы, определяющие начало и конец циклового фазирования.
1.3.5. Время циклового фазирования измеряется ИВФ.
1.4. Обработка результатов
1.4.1. Результаты подсчета сигналов «переспрос» и времени циклового фазирования снимаются оператором с устройства СУ и измерителя ИВФ соответственно или регистрируются автоматически.
1.4.2. Коэффициент эффективности канала ПД с РОС с последовательной передачей блоков (знаков) данных с блокировкой вычисляют по формуле
![]() ,
,
где — коэффициент, учитывающий снижение скорости передачи данных из-за введения проверочных и служебных единичных элементов, равный
![]() ,
,
где — число информационных единичных элементов в блоке (знаке) данных;
— число единичных элементов в блоке (знаке) данных;
— коэффициент, учитывающий снижение скорости передачи данных из-за наличия сигналов «переспрос» в режиме с последовательной передачей, равный
![]() ,
,
где — число сигналов «переспрос», подсчитанное за сеанс измерения;
— число блоков (знаков) данных, на которое блокируется вывод данных;
— скорость передачи данных, бит/с;
— длительность сеанса измерения, с (длительность сеанса измерения и достаточное время измерения приведены в рекомендуемом приложении 2);
— коэффициент, учитывающий снижение скорости передачи данных из-за циклового фазирования УЗО, равный
![]() ,
,
где — время, в течение которого УЗО находилось в режиме фазирования, с.
(Измененная редакция, Изм. N 1).
1.4.3. Коэффициент эффективности канала ПД с РОС с ожиданием сигнала обратной связи при однократной передаче блоков (знаков) данных вычисляют по формуле
![]() ,
,
где — коэффициент, учитывающий снижение скорости передачи данных из-за наличия сигналов «переспрос» в режиме с ожиданием при однократной передаче, равный
![]() ,
,
где — время, необходимое для передачи блока (знака) данных, с;
— время, необходимое для передачи сигнала «переспрос», с;
— время, необходимое для анализа блока (знака) данных, с;
— время, необходимое для анализа сигнала обратной связи, с;
— время распространения сигнала, с, равное
![]() ,
,
![]() ,
,
где — число сигналов «подтверждение», подсчитанное за сеанс измерения в режиме с ожиданием при однократной передаче, равное
![]() ,
,
где — время, затраченное на повторение данных из-за наличия сигналов «переспрос», с, равное
![]() ;
;
— время, необходимое для передачи сигнала «подтверждение», с.
1.4.4. Коэффициент эффективности канала ПД с РОС с накоплением правильно принятых блоков (знаков) данных вычисляют по формуле
![]() ,
,
где — коэффициент, учитывающий снижение скорости передачи данных из-за наличия сигналов «переспрос» в режиме с накоплением, равный
![]() ,
,
где — число подблоков в блоке данных;
— время, необходимое для передачи подблока данных, с, равное
![]() ,
,
где — время, необходимое для передачи кодовой комбинации, с;
— число комбинаций в подблоке данных;
— коэффициент, учитывающий снижение скорости передачи данных из-за ожидания сигналов «подтверждение» при многократном повторении подблоков данных, равный
![]() ,
,
где — число сигналов «подтверждение» за сеанс измерения в режиме с накоплением, равное
![]() ,
,
где — время, затраченное на повторение данных из-за наличия сигналов, «переспрос», с, равное
![]() .
.
1.4.5. При использовании УЗО, которые во время циклового фазирования выдают сигналы «переспрос», величину не измеряют и в формулах приравнивают к нулю.
2. ИЗМЕРЕНИЕ КОЭФФИЦИЕНТА ЭФФЕКТИВНОСТИ КАНАЛА ПД И СВОЕВРЕМЕННОСТИ ПОСТУПЛЕНИЯ ДАННЫХ ИЗ КАНАЛА ПД ПО СИГНАЛАМ «ГОТОВ К ПЕРЕДАЧЕ» ИЛИ «УПРАВЛЕНИЕ ИСТОЧНИКА ОКОНЕЧНОГО ОБОРУДОВАНИЯ ДАННЫХ (ООД)»
2.1. Aппаратурa
2.1.1. Устройство СУ.
2.1.2. Генератор испытательного сигнала (ГИС 1).
(Измененная редакция, Изм. N 1).
2.2. Подготовка к измерению
2.2.1. Структурная схема измерения приведена на черт.2.
Черт.2
2.3. Проведение измерений
2.3.1. В канал ПД подают данные или тест, вырабатываемый генератором испытательного сигнала (ГИС 1). Счетчиком СУ подсчитывается количество сигналов «готов к передаче» или «управление источника ООД», что соответствует количеству блоков или знаков, выведенных в канал ПД.
(Измененная редакция, Изм. N 1).
2.4. Обработка результатов
2.4.1. Результаты подсчета блоков или знаков данных, выведенных источником в канал ПД, снимает оператор с устройства СУ или они регистрируются автоматически.
(Измененная редакция, Изм. N 1).
2.4.2. Коэффициент эффективности канала ПД вычисляют по формуле
![]() ,
,
где — число блоков или знаков данных, выведенных источником в канал ПД за сеанс измерения.
2.4.3. Своевременность поступления данных из канала ПД характеризуется следующим условием
![]() ,
,
где — число блоков или знаков данных, подсчитанное за время ;
— заданное число блоков или знаков данных.
Число знаков в блоке определяется УЗО.
(Измененная редакция, Изм. N 1).
3. ИЗМЕРЕНИЕ СВОЕВРЕМЕННОСТИ ПОСТУПЛЕНИЯ ДАННЫХ ИЗ КАНАЛА ПД ПО СИГНАЛАМ «ПЕРЕСПРОС» И ВРЕМЕНИ ЦИКЛОВОГО ФАЗИРОВАНИЯ
3.1. Аппаратура
3.1.1. Устройство СУ.
3.1.2. Измеритель ИВФ.
3.1.3. Генератор испытательного сигнала (ГИС 1).
(Измененная редакция, Изм. N 1).
3.2. Подготовка к измерению
3.2.1. Структурная схема измерения приведена на черт.1.
3.3. Проведение измерений
3.3.1. В канал ПД подают данные либо тест.
3.3.2. При наличии ошибок в блоках (знаках) данных приемник УЗО выдает сигналы «переспрос».
3.3.3. Сигналы «переспрос» подсчитываются устройством СУ за сеанс измерения.
3.3.4. При наличии циклового фазирования УЗО выдает сигналы, определяющие начало и конец циклового фазирования.
3.3.5. Время циклового фазирования измеряется ИВФ.
3.4. Обработка результатов
3.4.1. Результаты подсчета сигналов «переспрос» и времени циклового фазирования снимает оператор с устройства СУ и измерителя ИВФ соответственно или они регистрируются автоматически.
3.4.2. Своевременность поступления данных из канала ПД с РОС с последовательной передачей блоков (знаков) данных с блокировкой определяют как суммарное время задержки , вычисляемое по формуле
![]() ,
,
где — время, необходимое для передачи заданного объема данных при отсутствии возмущающих факторов в канале связи и сбоев в аппаратуре ПД, с, равное
![]() ,
,
где — число информационных единичных элементов в заданном объеме данных;
— коэффициент, учитывающий длину информационной части блока (знака) данных и равный
![]() ,
,
— время задержки данных в канале ПД, вызванное наличием сигналов «переспрос», с, равное
![]() ,
,
где — число сигналов «переспрос», подсчитанное за время не превышающее ;
— допустимое время для передачи заданного объема данных, с.
3.4.3. Своевременность поступления данных из канала ПД с РОС с ожиданием сигнала обратной связи при однократной передаче блоков (знаков) данных определяют как суммарное время задержки, вычисляемое по формуле
![]() ,
,
где — время задержки данных в канале ПД, вызванное наличием сигналов «переспрос» и ожиданием сигнала «подтверждение», с, равное
![]() ,
,
где — время, затраченное на ожидание сигнала «подтверждение», с, равное
![]() .
.
3.4.4. Своевременность поступления данных из канала ПД с РОС с накоплением правильно принятых блоков (знаков) данных определяют как суммарное время задержки , вычисляемое по формуле
![]() ,
,
где — время, необходимое для передачи заданного объема данных с учетом многократного повторения при отсутствии возмущающих факторов в канале связи и сбоев в аппаратуре ПД, с, и равное
![]() ;
;
— время задержки данных в канале ПД, вызванное наличием сигналов «переспрос» и ожиданием сигнала «подтверждение» с учетом многократного повторения подблоков данных, с, равное
![]() ,
,
где — время задержки данных в канале ПД, вызванное ожиданием сигнала «подтверждение» с учетом многократного повторения подблоков данных, с, равное
![]() .
.
3.4.5. При использовании УЗО, которые во время циклового фазирования выдают сигналы «переспрос», величину не измеряют и в формулах приравнивают к нулю.
4. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ОШИБОК ПО ЭЛЕМЕНТАМ И БЛОКАМ В ДИСКРЕТНОМ КАНАЛЕ
4.1. Aппapатура
4.1.1. Устройство выявления ошибок в дискретном канале (УВО-ДК), электрические параметры входных и выходных цепей которого на стыке с устройством преобразования сигналов должны соответствовать требованиям ГОСТ 23675-79. Скорости и алгоритмы работы должны определяться УПС. УВО-ДК должно содержать устройство фазирования принимаемого теста с эталонным и индикатор расфазирования.
(Измененная редакция, Изм. N 3).
4.1.2. Устройство СУ может входить в состав УВО-ДК либо быть самостоятельным.
4.1.3. Генератор испытательного сигнала (ГИС 2) электрические параметры входных и выходных цепей которого на стыке с УПС должны соответствовать требованиям ГОСТ 23675-79. Тест должен состоять из 511-элементной рекуррентной последовательности. Скорости и алгоритмы работы должны определяться УПС.
(Измененная редакция, Изм. N 1, 3).
4.2. Подготовка к измерению
(Введен дополнительно, Изм. N 1).
4.2.1. Структурная схема измерения для случая, когда устройство СУ входит в состав УВО-ДК, приведена на черт.3.
Черт.3
(Измененная редакция, Изм. N 1).
4.3. Проведение измерений
4.3.1. В дискретный канал из генератора испытательного сигнала (ГИС 2) выдается тест.
(Измененная редакция, Изм. N 1).
4.3.2. Тест, принятый устройством УПС, подается на схему сравнения (СС).
4.3.3. В схеме СС принимаемый тест сравнивается с тестом эталонного датчика (ЭД), который предварительно должен быть сфазирован с принимаемым.
4.3.4. Устройством СУ подсчитывается количество ошибочных единичных элементов и ошибочных блоков.
(Измененная редакция, Изм. N 1).
4.4. Обработка результатов
4.4.1. Результаты подсчета ошибочных единичных элементов и ошибочных блоков снимает оператор с устройства СУ, или они регистрируются автоматически.
4.4.2. Коэффициент ошибок по элементам для дискретного канала , вычисляют по формуле
,
где — число ошибочных единичных элементов, подсчитанное за сеанс измерения;
— число единичных элементов, выданное потребителю за сеанс измерения, равное .
4.4.1, 4.4.2. (Измененная редакция, Изм. N 1).
4.4.2а. Коэффициент ошибок по блокам для дискретного канала вычисляют по формуле
![]() ,
,
где — число ошибочных блоков, подсчитанное за сеанс измерения;
— число переданных блоков за сеанс измерения, равное ![]() .
.
(Введен дополнительно, Изм. N 1).
4.4.3. Ошибочные единичные элементы и блоки, подсчитанные за сеанс измерения, в котором произошло цикловое расфазирование УВО-ДК, не учитывают.
(Измененная редакция, Изм. N 1).
5. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА НЕОБНАРУЖЕННЫХ ОШИБОК КАНАЛА ПД
5.1.Аппаратура
5.1.1. Устройство выявления ошибок (УВО), электрические параметры входных и выходных цепей которого на стыке с УЗО должны соответствовать требованиям ГОСТ 23675-79 или ГОСТ 18146-72.
Скорости и алгоритмы работы должны определяться УЗО.
УВО должно иметь устройство циклового фазирования принимаемого теста с тестом эталонного датчика, а также индикатор расфазирования.
Устройства СУ могут входить в состав УВО либо быть самостоятельными.
Электрическая структурная схема УВО приведена в справочном приложении 3.
(Измененная редакция, Изм. N 3).
5.1.2. Генератор испытательного сигнала (ГИС 1).
5.1.3. При необходимости прибор УВО должен отличать выпадения и вставки от расфазирований, подсчитывать число вставок и выпадений и фиксировать расфазирования.
5.1.2, 5.1.3. (Измененная редакция, Изм. N 1).
5.2. Подготовка к измерению
5.2.1. Структурная схема измерения приведена на черт.4.
Черт.4.
(Измененная редакция, Изм. N 1).
5.3. Проведение измерений
5.3.1. В канал ПД из датчика выдается тест.
5.3.2. Тест, принятый УПС, через УЗО подается на схему СС устройства УВО, где сравнивается с эталонным. Эталонный тест предварительно должен быть сфазирован с принимаемым.
5.3.3. Устройство СУ1 подсчитывает ошибочные единичные элементы.
5.3.4. Устройство СУ2 подсчитывает ошибочные блоки (знаки).
5.3.5. Устройство СУЗ подсчитывает блоки (знаки), сформированные из теста и выданные потребителю. В технически обоснованных случаях подсчет блоков (знаков) можно производить по времени передачи.
5.4. Обработка результатов
5.4.1. Результаты подсчета ошибочных информационных единичных элементов, ошибочных блоков (знаков) и блоков (знаков), сформированных из теста и выданных потребителю, снимает оператор с устройства СУ, или они регистрируются автоматически.
5.4.2. Коэффициент необнаруженных ошибочных информационных единичных элементов вычисляют по формуле
![]() ,
,
где — число необнаруженных ошибочных информационных единичных элементов, подсчитанное за сеанс измерения;
— число единичных информационных элементов, выданных потребителю за сеанс измерения, равное
![]() ,
,
где — число единичных информационных элементов в блоке (знаке), сформированном из теста;
— число блоков (знаков), сформированных из теста и выданных потребителю за сеанс измерения.
5.4.3. Коэффициент необнаруженных ошибок по блокам (знакам), сформированным из теста подсчитывают по формуле
![]() ,
,
где — число необнаруженных ошибочных блоков (знаков), подсчитанное за сеанс измерения.
5.4.4. Необнаруженные информационные ошибочные единичные элементы, блоки (знаки), подсчитанные за сеанс измерения, в котором произошло цикловое расфазирование УВО, не учитывают.
5.4.5. Ошибки, вызванные вставками и выпадениями при расчете и не учитывают.
5.4.2-5.4.5. (Измененная редакция, Изм. N 1).
5.4.6. Число выпадений и вставок должно быть зафиксировано.
6. ИЗМЕРЕНИЕ КРАЕВЫХ ИСКАЖЕНИЙ
6.1. Аппаратура
6.1.1. Измеритель краевых искажений (ИКИ) должен соответствовать требованиям ГОСТ 18627-73. Электрические параметры входных и выходных цепей ИКИ на стыке с УПС должны соответствовать требованиям ГОСТ 23675-79. Скорости и алгоритмы работы ИКИ должны определяться УПС.
Погрешность измерения не должна превышать ±3% от длительности единичного элемента.
Электрическая структурная схема ИКИ приведена в справочном приложении 4.
6.1.2. Генератор испытательного сигнала (ГИС 2).
6.1.1, 6.1.2. (Измененная редакция, Изм. N 1).
6.2. Подготовка к измерению
6.2.1. Структурная схема измерения приведена на черт.5.
Черт.5
6.3. Проведение измерений
6.3.1. В канал связи через передатчик УПС выдаются данные либо тест.
6.3.2. При измерении краевых искажений как интервала времени между значащими моментами демодулированных сигналов (ДС) и идеальными значащими моментами из приемника УПС в ИКИ выдаются сигналы ДС и сигналы фазирования (СФ).
6.3.3. Сигналы СФ, принимаемые за идеальные значащие моменты, могут не поступать из УПС, а вырабатываться в ИКИ.
6.3.4. При измерении краевых искажений как отклонения длительности значащих интервалов ДС от длительности идеальных значащих интервалов из приемника УПС в ИКИ выдаются только сигналы ДС.
6.4. Обработка результатов
6.4.1. При измерении краевых искажений в соответствии с п.6.3.2 по шкале измерителя ИКИ производят отсчет максимального времени смещения значащих моментов сигналов ДС относительно значащих моментов сигналов СФ. Результатом отсчета является степень индивидуального искажения.
6.4.2. При измерении краевых искажений в соответствии с п.6.3.4 по шкале измерителя ИКИ проводят отсчет максимальных временных смещений длительностей значащих интервалов ДС от длительностей идеальных значащих интервалов, вырабатываемых в ИКИ.
Результатом отсчета является степень синхронного искажения.
6.4.1, 6.4.2. (Измененная редакция, Изм. N 1).
Разд.7. (Исключен, Изм. N 1).
ПРИЛОЖЕНИЕ 1 (справочное). ОПРЕДЕЛЕНИЕ ТЕРМИНОВ, ПРИМЕНЯЕМЫХ В СТАНДАРТЕ
ПРИЛОЖЕНИЕ 1
Справочное
Коэффициент эффективности — отношение реальной скорости передачи данных по каналу ПД к номинальной скорости передачи данных по этому каналу.
Своевременность поступления данных из канала ПД — передача каналом ПД заданного объема данных за время, не превышающее допустимое.
«Переспрос» — сигнал, передаваемый по каналу обратной связи для повторной передачи данных, неправильно принятых на приеме.
«Подтверждение» — сигнал, передаваемый по каналу обратной связи и свидетельствующий о том, что данные на приеме приняты правильно.
Подблок данных — часть блока данных, содержащая комбинаций корректирующего кода.
ПРИЛОЖЕНИЕ 2 (рекомендуемое). ОПРЕДЕЛЕНИЕ ВРЕМЕННЫХ ХАРАКТЕРИСТИК, ИСПОЛЬЗУЕМЫХ ПРИ ПРОВЕДЕНИИ ИЗМЕРЕНИЙ
ПРИЛОЖЕНИЕ 2
Рекомендуемое
1. Критерием расфазирования считают перерыв канала связи длительностью более 300 мс.
Примечания:
1. В технически обоснованных случаях может быть установлен другой критерий расфазирования.
2. При обработке результатов измерений должно быть указано количество аннулированных сеансов.
Длительность сеанса измерения должна быть не более 15 мин.
3. Время измерения коэффициента ошибок в дискретном канале проводной связи протяженностью не более 2500 км должно быть 50 ч. При этом измеренное значение с вероятность 0,9 не должно отличаться от истинного значения более чем на ±30%.
Если протяженность каналов () более 2500 км, указанное время умножают на коэффициент ![]() , при этом минимальное время измерения — 20 ч.
, при этом минимальное время измерения — 20 ч.
4. Коэффициент эффективности канала ПД определяют одновременно с определением коэффициента необнаруженных ошибок в целях уменьшения времени измерения , которое для каналов ПД, оборудованных УЗО с использованием циклических кодов, определяют по формуле
![]() ,
,
где — число необнаруженных ошибочных блоков. Для блоков данных длиной менее 240 информационных единичных элементов ![]() . Для блоков данных длиной 240 информационных единичных элементов 5;
. Для блоков данных длиной 240 информационных единичных элементов 5;
— плотность ошибочных единичных элементов;
![]() — функция доверительных границ, определяемая по табл.1;
— функция доверительных границ, определяемая по табл.1;
Таблица 1
|
0,95 |
0,90 |
0,80 |
|
|
1 |
0,21 |
0,26 |
0,33 |
|
2 |
0,32 |
0,38 |
0,47 |
|
3 |
0,39 |
0,45 |
0,55 |
|
4 |
0,44 |
0,50 |
0,60 |
|
5 |
0,48 |
0,54 |
0,63 |
|
6 |
0,51 |
0,57 |
0,66 |
|
7 |
0,53 |
0,59 |
0,68 |
|
8 |
0,55 |
0,62 |
0,70 |
|
9 |
0,57 |
0,63 |
0,72 |
|
10 |
0,59 |
0,65 |
0,73 |
|
11 |
0,60 |
0,66 |
0,74 |
|
12 |
0,62 |
0,67 |
0,75 |
|
13 |
0,63 |
0,68 |
0,76 |
|
14 |
0,64 |
0,69 |
0,77 |
|
15 |
0,65 |
0,70 |
0,78 |
|
20 |
0,69 |
0,74 |
0,81 |
|
25 |
0,72 |
0,76 |
0,83 |
|
30 |
0,74 |
0,78 |
0,84 |
|
40 |
0,77 |
0,81 |
0,87 |
|
50 |
0,79 |
0,83 |
0,88 |
|
60 |
0,81 |
0,84 |
0,89 |
|
80 |
0,83 |
0,86 |
0,90 |
|
100 |
0,85 |
0,88 |
0,91 |
— доверительная вероятность;
— длительность блока данных, мс;
— вероятность необнаруженных ошибок по единичным элементам, равная
![]() ,
,
где — заданная вероятность необнаруженных ошибочных блоков.
Для блоков данных длиной менее 240 информационных единичных элементов ![]() 0,2.
0,2.
Для блоков данных длиной 240 информационных единичных элементов ![]() 0,25.
0,25.
Эта величина может быть уточнена по результатам статистических испытаний.
Пример количественного расчета времени измерения для длины блоков данных, используемых в аппаратуре ПД при доверительной вероятности 0,9 и 1·10, 1·10, приведен в табл.2.
Таблица 2
|
Длина блока единичных элементов |
Скорость передачи данных , бит/с |
Длительность блока , мс |
Число необнаруженных ошибочных блоков |
Время измерений , ч при вероятности ошибок |
|
|
1·10 |
1·10 |
||||
|
261 |
600 |
435,00 |
5 |
280 |
2800 |
|
1200 |
217,50 |
140 |
1400 |
||
|
2400 |
108,75 |
70 |
700 |
||
|
4800 |
54,38 |
35 |
350 |
||
|
117 |
600 |
195,00 |
10 |
168 |
1680 |
|
1200 |
97,50 |
84 |
840 |
||
|
2400 |
48,75 |
42 |
420 |
||
|
4800 |
24,38 |
21 |
210 |
||
|
69 |
600 |
115,00 |
10 |
100 |
1000 |
|
1200 |
57,50 |
50 |
500 |
||
|
2400 |
28,75 |
25 |
250 |
||
|
4800 |
14,38 |
13 |
130 |
||
|
45 |
600 |
75,00 |
10 |
64 |
640 |
|
1200 |
37,50 |
32 |
320 |
||
|
2400 |
18,75 |
16 |
160 |
||
|
4800 |
9,38 |
8 |
80 |
(Измененная редакция, Изм. N 1).
ПРИЛОЖЕНИЕ 3 (справочное). Электрическая структурная схема УВО
ПРИЛОЖЕНИЕ 3
Справочное
Электрическая структурная схема УВО
ПРИЛОЖЕНИЕ 4 (справочное). Электрическая структурная схема ИКИ
ПРИЛОЖЕНИЕ 4
Справочное
Электрическая структурная схема ИКИ
3.1 Бинарный канал и методы анализа его параметров.
Рассмотрение
методологии измерений цифровых каналов
начнем с описания методов измерения
цифровых каналов с передачей информации
в простой двоичной форме (без линейного
кодирования) — бинарных цифровых каналов
(рис. 6). В современных
информационно-телекоммуникационных
системах для передачи цифровой информации
используются различные типы модуляции
и многоуровневого кодирования, однако
оконечное оборудование систем передачи
в той или иной степени использует именно
бинарный цифровой канал, поэтому
методология измерений бинарного канала
является фундаментом измерений цифровых
каналов связи. Более того, для анализа
систем с различными типами модуляции
и кодирования используются данные
методологии измерений по битам, т.е.
имитируется процесс декодирования
(демодуляции) сигнала до двоичного вида,
а затем полученный сигнал анализируется.
Таким образом, методология измерений
параметров бинарного канала представляет
собой инвариант методологии измерений
любых цифровых каналов.
Рисунок 6 — Бинарный
цифровой канал
Основное назначение
бинарного цифрового канала — это передача
цифровой информации в двоичной форме,
т.е. в виде битов, поэтому основные
параметры качества такой цифровой
передачи связаны с параметром ошибки
по битам (Bit Error Rate — BER) и его производными.
Измерения по параметру BER вошли в методики
измерений всех первичных и вторичных
сетей.
Для правильного
понимания всех нюансов измерений
цифровых каналов связи необходимо
глубокое понимание технологии измерений
бинарного цифрового канала.
Различаются два
типа измерений бинарного канала —
измерения с отключением канала и
измерения без отключения канала. При
отключении канал не используется в
процессе измерений для передачи реального
цифрового трафика. В качестве источника
и приемника двоичного сигнала используются
анализаторы цифрового канала. Измерения
без отключения канала предусматривают
использование специальных алгоритмов
анализа параметров канала в процессе
при передаче реального трафика.
При измерениях с
отключением канала сигнал передается
в виде тестовой последовательности,
которая принимается на другом конце
канала (приемник) и затем проводится
анализ ошибок, вносимых каналом.
Анализатор приемника должен обеспечивать
предсказание структуры последовательности,
т.е. требуется так называемая синхронизация
тестовой последовательности. Для
измерений используются разные тестовые
последовательности, фиксированные и
псевдослучайные, с различными алгоритмами
синхронизации тестовой последовательности.
Измерения с отключением канала — это
единственный метод анализа параметров
бинарного цифрового канала с точностью
до единичной ошибки по битам (битовая
ошибка). Это гарантируется принципом
сравнения реально принятой последовательности
битов с предсказанной, которая, в свою
очередь, точно совпадает с генерируемой
последовательностью.
Измерения без
отключения канала часто называются
мониторингом, поскольку проводятся в
режиме работающего канала, а анализатор
в этом случае подключается параллельно
и осуществляет пассивный мониторинг
канала. Алгоритм организации измерений
основан на применении различных типов
цикловых кодов или служебной информации,
передаваемой в канале. Действительно,
в реально работающем канале, с реальным
трафиком нельзя предсказать передаваемую
информацию, следовательно нельзя просто
сравнить реальную последовательность
битов с предсказанной последовательностью,
поэтому невозможно локализован единичную
битовую ошибку. Методы измерения без
отключения канала основаны на идентификации
битовой ошибки в некотором блоке
переданной информации, таким образом,
объективная точность измерения ограничена
размерами блока. Обычно две ошибки в
блоке идентифицируются как одна. В то
же время несомненное преимущество
метода — отсутствие необходимости
отключения канала — определило широкое
его распространение.
Возникновение
ошибок по битам и их влияние на параметры
цифровой передачи
В аналоговых
системах передачи канал, воздействуя
на параметры передаваемого аналогового
сигнала, снижает качественные параметры
сигнала. В цифровых системах передачи
различные воздействия на цифровой канал
приводят к снижению основного качественного
параметра — параметра ошибки. Причины
возникновения ошибок в цифровом канале
имеют аналоговую природу, поскольку
связаны с интерференцией, затуханием
в линии и различными аддитивными шумами
(рис. 7).
Рисунок 7 — Основные
источники ошибок в цифровом канале
На рисунке 7
представлены основные источники ошибок
в цифровом канале: искажения, наличие
импульсных помех, аддитивный шум в
канале и затухание в линии. Как видно,
наличие искажений в канале может быть
связано как с затуханием, так и с
отражением сигнала. Источниками шумов
выступают физически разрушенный кабель
(например, разбитая пара), слишком малое
поперечное сечение, большая распределенная
емкость в кабеле. Другим важным источником
шумов являются интерферирующие импульсы
или импульсные помехи в канале. Источниками
ошибок здесь могут быть силовые кабели,
проложенные в непосредственной близости
от линии связи, нарушение оболочки
кабелей, сигнализация по постоянному
току. Наиболее существенным и многоплановым
фактором влияния на параметры цифрового
канала является наличие аддитивных
шумов различной природы. Источниками
ошибки здесь могут быть нарушение
балансировки кабеля, параметра скручивания
витой пары, интерференция с различными
радиочастотными и СВЧ-сигналами, сигналы
вызова, нарушение полярности кабеля
(перепутанные жилы, короткое замыкание
между жилами и т.д.) Высокий уровень
шумов может привести к значительному
увеличению параметра ошибки.
Цифровые системы
передачи имеют большую по сравнению с
аналоговыми системами помехозащищенность.
Однако закономерность влияния уровня
шума на параметр ошибки справедлива
только для большого отношения сигнал/шум.
Если рассматривать влияние интерференции
на параметры цифрового канала, то эту
закономерность можно схематически
представить графиком рисунок 8. Как
видно из графика, цифровые системы
передачи имеют определенный порог
чувствительности к интерференции, в
отличие от аналоговых систем передачи,
где имеет место прямая зависимость
эффекта влияния интерференции от ее
уровня. Однако влияние интерференции
на параметры цифровых систем передачи
более существенно, и с определенного
уровня эффект этого влияния даже
превышает эффект воздействия на параметры
аналоговых систем.
Рисунок 8 — Влияние
интерференции на параметры аналоговых
и цифровых систем передачи
Наконец, важным
источником шумов в цифровых каналах
является затухание в кабелях и линиях
передачи, причем не только высокий
уровень затухания, но и его неравномерная
характеристика приводят к появлению
субгармоник, вносящих дополнительный
аддитивный шум.
Если рассматривать
источники ошибок не только в канале, но
и в цифровой системе передачи, то можно
выделить внутренние и внешние источники.
К внутренним
источникам ошибок относятся:
-
различная
нестабильность во внутренних цепях
синхронизации цифровых устройств,
дрейф в системе внутренней синхронизации
устройства; -
нестабильность,
связанная с измерением характеристик
электронных компонентов в составе
устройства; -
перекрестные
помехи в цепях устройств; -
нарушения в работе
эквалайзеров и в процессах, связанных
с неравномерностью АЧХ; -
повышение порога
по шуму, связанное с изменением параметров
модулей устройств со временем.
К внешним источникам
ошибок можно отнести:
-
перекрестные
помехи в каналах передачи; -
джиттер в системе
передачи; -
электромагнитная
интерференция (от машин, флуорисцентных
ламп и т.д.); -
нестабильность
источников питания устройств; -
импульсные шумы
в канале; -
механические
повреждения, воздействие вибрации,
плохие контакты; -
деградация
качественных параметров среды передачи
(электрического или оптического кабеля,
радиочастотного канала и т.д.); -
глобальные
нарушения, связанные с разрушением
канала цифровой передачи.
Влияние всех
перечисленных источников ошибок и
интерференции значительно повышается
при снижении параметра отношения
сигнал/шум
Если рассмотреть
влияние интерференции на параметры
качества работы цифровой системы
передачи, можно отметить, что влияние
битовых ошибок отличается для различных
услуг и систем передач в зависимости
от следующих факторов:
-
типа передаваемого
трафика (голос, данные, видео, мультимедиа
и т.д.); -
типа системы
передачи, принципов кодирования и
наличия цепей резервирования передачи
сигнала; -
количества и
частоты битовых ошибок; -
распределения
битовых ошибок (равномерно распределенные
ошибки, ошибки, возникающие пакетами
и т.д.); -
источника
интерференции; -
устойчивости
принятого в системе передачи принципа
передачи цифровой информации к ошибкам; -
устойчивости
принятого в системе передачи принципа
передачи цифровой информации к другим
факторам воздействия (джиттеру,
нестабильности синхронизации и т.д.»)
Основные параметры,
измеряемые в бинарном цифровом канале
Все параметры,
измеряемые в бинарном цифровом канале,
будут встречаться в технологии измерений
цифровых каналов первичной и вторичных
цифровых сетей. Прежде чем рассматривать
технологию измерений параметров
бинарного цифрового канала, необходимо
определить эти параметры. Ниже приведены
основные параметры, измеряемые в бинарном
цифровом канале. Они описаны в соответствии
с сокращениями, используемыми в меню
большинства приборов. В основном это
параметры, используемые для анализа
характеристик бинарного канала согласно
ITU-T рекомендации G.821, G.826 и М.2100.
AS — Availability Seconds —
время готовности канала (с) — вторичный
параметр, равный разности между общей
длительностью теста и временем
неготовности канала.
AS(%) — Availability Seconds —
относительное время готовности канала
— параметр, характеризующий готовность
канала, выраженный в процентах, является
первичным параметром и входит в число
основных параметров ITU-T рекомендации
G.821. Его можно интерпретировать как
вероятностную меру качества предоставляемого
пользователю канала.
ВВЕ — Background Block
Error — блок с фоновой ошибкой — блок с
ошибками не является частью SES, применяется
при анализе ошибок по блокам. Важный
параметр, вошедший в рекомендации ITU-T
G.826.
BIT
или ERR
BIT
— Bit
Errors
— число ошибочных битов — параметр,
используемый при анализе канала на
наличие битовых ошибок и являющийся
числителем в выражении для расчета BER.
Битовые ошибки подсчитываются только
в период пребывания канала в состоянии
готовности.
ЕВ — Error
Block
— число ошибочных блоков — параметр,
используемый при анализе каиала на
наличие блоковых ошибок и являющийся
числителем в выражении для расчета
BLER.
Блоковые ошибки подсчитываются только
в период пребывания канала в состоянии
готовности.
BBER
— Background
Block
Error
Rate
— коэффициент ошибок по блокам с фоновыми
Ошибками — отношение числа блоков с
фоновыми ошибками ко всему количеству
блоков в течение времени готовности
канала за исключением всех блоков в
течении SES.
Параметр входит в рекомендации ITU-T
G.826.
RATE
или BER
— Bit
Error
Rate
— частота битовых ошибок, коэффициент
ошибок по битам — основной параметр в
системах цифровой передачи, равный
отношению числа битовых ошибок к общему
числу бит, переданных за время проведения
теста по каналу, находящемуся в состоянии
готовности. При обнаружении десяти
последовательных секундных интервалов,
сильно пораженных ошибками (SES),
анализатор ИКМ переключается на подсчет
времени неготовности канала. При этом
измерение BER
прерывается до восстановления
работоспособности канала. Таким образом,
управляемые проскальзывания, связанные
с потерей одного или нескольких циклов
информации, практически не влияют на
значение BER.
Измерения параметра BER
универсальны, они не требуют наличия в
потоке Е1 цикловой и сверхцикловой
структуры, однако необходима передача
специальной тестовой последовательности.
Проводятся только при полном или
частичном отключении цифрового канала
от полезной нагрузки.
BLER
— Block
Error
Rate
— частота блоковых ошибок, коэффициент
ошибок по блокам — редко применяемый на
практике параметр, равный отношению
числа ошибочных блоков данных к общему
числу переданных блоков. Под блоком
понимается заданное количество битов.
Ошибочным блоком считается блок,
содержащий хотя бы один ошибочный бит.
Обычно значение параметра BLER
больше (хуже), чем параметра BER.
Его целесообразно измерять только в
тех сетях передачи данных, где информация
передается блоками фиксированного
размера, а параметр BLER
является важной характеристикой канала
с учетом кадровой (цикловой) структуры
передачи. Например, для сетей ATM
принята кадровая структура передачи в
виде кадров длиной 53 бита. Ошибочный
кадр уничтожается (дискартируется). В
этом случае можно считать кадр ATM
блоком длиной в 53 бита, а эквивалентом
BLER
будет параметр ошибки по кадрам CER
(Cell
Error
Rate).
В другом примере в качестве эквивалента
блока может выступать сверхцикл ИКМ, а
эквивалентом BLER
будет ошибка по CRC.
CLKSLIP
или SLIP
— Clock
Slips
— число тактовых проскальзываний —
параметр характеризуется числом
синхронных управляемых проскальзываний,
появившихся с момента начала теста.
Проскальзыванием называется повторение
или исключение группы символов в
синхронной или плезиохронной
последовательности двоичных символов
в результате различия между скоростями
считывания и записи в буферной памяти.
Поскольку проскальзывание ведет к
потере части информации, что в свою
очередь ведет к потере цикловой
синхронизации, на практике используются
эластичные управляемые буферы с
возможностью управления проскальзываниями.
В этом случае проскальзывания называются
управляемыми. В наибольшей степени
параметр CLKSLIP
связан с параметром неготовности канала
(UAS).
Сопоставление CLKSLIP
и UAS
позволяет выявить причину неготовности
канала, в частности, связана ли она с
нарушением синхронизации. Значение
параметра CLKSLIP
зависит от размера имитируемого прибором
буфера, емкостью от 1 бита до нескольких
циклов.
CRC
ERR
— CRC
Errors
— число ошибок CRC
— параметр ошибки, измеренный с
использованием циклового избыточного
кода (CRC),
распространенный параметр определения
ошибок реально работающего канала без
его отключения и без передачи тестовой
последовательности. Данные кода
помещаются в состав сверхцикла ИКМ,
Необходимым условием измерения параметра
CRC
является наличие механизма формирования
кода в аппаратуре передачи. Встроенные
средства самодиагностики большей части
современных цифровых систем передачи
используют именно этот механизм. Таким
образом, при измерении параметра CRC
можно не только оценить частоту ошибок,
но в проверить работу системы
самодиагностики.
При использования
CRC
часто возникает вопрос о необходимости
одновременного измерения и параметра
BER.
Необходимо учитывать две особенности
применения CRC.
Во-первых, каждая ошибка CRC
не обязательно связана с ошибкой одного
бита информации. Несколько битовых
ошибок в одном сверхцикле могут дать
только одну ошибку CRC
для блока Во-вторых, несколько битовых
ошибок могут компенсировать друг друга
и не входить в суммарную оценку CRC.
Таким образом, при использовании CRC
можно говорить не об истинном уровне
ошибок в канале, а только об оценке их
величины. Тем не менее CRC
является удобным методом контроля
ошибок при проведении сервисного
наблюдения за работающим каналом, когда
практически невозможно измерить реальные
параметры битовых ошибок.
CRC
RATE
— CRC
Errors
Rate
— частота ошибок CRC
— показывает среднюю частоту ошибок
CRC.
По описанным выше причинам бывает лишь
частично коррелирован с параметром
BER.
DGRM
— Degraded
Minutes
— число минут деградации качества —
несколько временных интервалов
продолжительностью 60 с каждый, когда
канал находится в состоянии готовности,
но BER=10″‘.
Ошибки во время неготовности канала не
считаются, а интервалы по 60 с в состоянии
готовности канала, пораженные ошибками
несколько раз, суммируются.
DGRM
(%) — Degraded
Minutes
— процент минут деградации качества —
число минут деградации качества,
выраженное в процентах по отношению ко
времени, прошедшему с момента начала
тестирования.
EFS
— Error
Free
Seconds
— время, свободное от ошибок (с), — один
из первостепенных параметров, входящих
в рекомендации G.821
и М.2100/М.550. Отражает время, в течение
которого сигнал был правильно
синхронизирован, а ошибки отсутствовали,
т.е. общее время пребывания канала в
состоянии готовности.
EFS(%)
— Error
Free
Seconds
— процент времени, свободного от ошибок
(с), — то же, что и предыдущий параметр,
только выраженный в процентах по
отношению к общему времени с момента
начала тестирования.
ES
— Errors
Seconds
— длительность поражения сигнала
ошибками, количество секунд с ошибками
(с) — параметр показывает интервал
времени поражения всеми видами ошибок
в канале, находящемся в состоянии
готовности. ES
связан с другими параметрами простым
соотношением: AS
= ES
+ EFS.
ES(%)
— Errors
Seconds
— процент поражения сигнала ошибками
— параметр связан с %EFS
соотношением: %ES
+ %EFS
= %AS.
ESR
— Error
Seconds
Rate
— коэффициент ошибок по секундам с
ошибками — параметр, практически равный
ES(%).
LOSS
— Loss
of
Signal
Seconds
— длительность потери сигнала (с) —
параметр характеризует интервал времени,
в течение которого сигнал был потерян.
PATL
— Pattern
Loss
— количество потерь тестовой
последовательности — параметр
характеризуется числом потерь тестовой
последовательности, появившихся с
момента начала теста.
PATLS
— Pattern
Loss
Seconds
— продолжительность времени потери
тестовой последовательности — общее
время потери тестовой последовательности
с момента начала теста.
SES — Severally Errors Seconds
— продолжительность многократного
поражения ошибками, количество секунд,
пораженных ошибками (с), — интервал
времени, пораженный ошибками несколько
раз, измеряемый в секундах. В это время
частота битовых ошибок составляет
BER>10-3. Подсчет SES производится только
во время готовности канала. Из определения
видно, что SES — составная часть параметра
ES. Вторая интерпретация параметра SES
связана с измерениями по блоковым
ошибкам, тогда SES определяется как
односекунд-ный интервал времени,
содержащий более 30 % блоков с ошибками.
Можно сказать, что во время подсчета
параметра SES, качество канала чрезвычайно
плохое. Параметр SES очень важен и входит
в перечень обязательных к измерению
параметров ИКМ рекомендаций G.821 и
М..2100/М.550.
SES(%) — Severally Errors
Seconds — относительная продолжительность
многократного поражения ошибками — тот
же параметр, выраженный в процентах.
SESR — Severally Error Seconds
Rate — коэффициент ошибок по секундам,
пораженным ошибками — параметр, практически
равный SES(%).
SLIPS или CKSLIPS — Clock
Slips Seconds — продолжительность тактовых
проскальзываний — параметр характеризуется
общим временем с наличием синхронных
управляемых проскальзываний.
UAS — Unavailability Seconds —
время неготовности канала (с) — время
неготовности канала начинает отсчитываться
с момента обнаружения 10 последовательных
интервалов SES и увеличивается после
каждых следующих 10 последовательных
интервалов SES. Счет UAS обычно начинается
с момента потери цикловой синхронизации
или сигнала. Этот параметр связан со
всеми предыдущими параметрами и
определяет стабильность работы цифрового
канала.
UAS(%) — Unavailability
Seconds — относительное время неготовности
канала — предыдущий параметр, выраженный
в процентах.
Тестовые
последовательности
Для организации
измерений с отключением канала
используются генератор и анализатор
тестовой последовательности, подключенные
к разным концам цифрового канала. Эти
приборы синхронизированы по тестовой
последовательности, т.е. анализатор
может предсказать следующее значение
каждого принимаемого бита.
В практике
используются два типа тестовых
последовательностей — фиксированные и
псевдослучайные (ПСП, PRBS — Pseudorandom Binary
Sequence). Фиксированными являются
последовательности чередующихся
повторяемых комбинаций битов. В качестве
примера рассмотрим альтернативную
фиксированную последовательность типа
1010, в которой после каждого 0 идет 1.
Процедура синхронизации тестовой
последовательности в этом случае может
быть чрезвычайно проста: анализатор
заранее запрограммирован на ожидание
альтернативной последовательности.
При приеме 1 он предсказывает появление
в качестве следующего бита 0, и в случае
приема 1 делается вывод о битовой ошибки.
Реальная процедура синхронизации
несколько сложнее, поскольку требуется
проверка, не является ли первый принятый
бит ошибочным. Для этого проверяется
правильность синхронизации в течение
нескольких последовательных групп
битов (блоков), при этом сама процедура
синхронизации аналогична. Такая процедура
синхронизации не указывает на начало
цикла.
При фиксированной
тестовой последовательности с указанием
начала цикла, начало цикла задается
специальным битом или последовательностью
битов (далее называется бит f).
В практике могут
использоваться обе процедуры синхронизации
тестовой последовательности. В последнее
время производители склоняются к
внедрению процедуры с указанием начала
цикла, поскольку в этом случае синхронизация
тестовой последовательности осуществляется
в течении нескольких циклов — порядка
8-16 переданных битов. Исключение составляют
постоянные фиксированные последовательности
0000 и 1111, где процедура с указанием начала
цикла не имеет смысла.
В современной
практике используются следующие
фиксированные тестовые последовательности:
1111 — все единицы —
фиксированная последовательность
используется обычно для расширенного
и стрессового тестирования канала.
Например, если последовательность
послана в неструктурированном потоке
Е1, то это будет понято как сигнал
неисправности (AIS).
1010 — альтернативная
— фиксированная последовательность из
чередующихся нулей и единиц.
Последовательность может передаваться
без указания или с указанием начала
цикла -f 0101 0101.
0000 — все нули —
фиксированная последовательность
используется обычно для расширенного
и стрессового тестирования канала.
FOX — фиксированная
последовательность FOX используется в
приложениях передачи данных.
Последовательность в ASCII переводится
как «Quick brown fox.». Синхронизация
последовательности осуществляется
правильным переводом предложения. Ниже
приведена последовательность:
2А, 12, А2, 04, 8А, АА,
92, С2, D2, 04, 42, 4А, F2, ЕА, 72, 04, 62, F2, 1А, 04, 52, АА,
В2, ОА, СА, 04, F2, 6А, А2, 4А, 04, 2А, 12, А2, 04, 32, 82,
5А, 9А, 04, 22, F2, Е2, 04, 8С, 4С, СС, 2С, АС, 6С, ЕС,
1C, 9С, ОС, ВО, 50
1-3 — одна единица
на три бита — промышленный стандарт 1 в
3 последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 010.
1-4 — одна единица
на три бита — промышленный стандарт 1 в
4 последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 0100.
1-8 — одна единица
на восемь битов — промышленный стандарт
1 в 8 последовательностях используется
для расширенного и стрессового
тестирования канала. Последовательность
передается с указанием на начало цикла:
f 0100 0000.
3-24 — три единицы
на 24 бита — промышленный стандарт 3 в 24
последовательностях используется для
расширенного и стрессового тестирования
канала. Последовательность передается
с указанием на начало цикла: f 0100 0100 0000
0000 0000 0100.
Кроме перечисленных
стандартных фиксированных последовательностей
могут использоваться произвольные
слова и предложения. Процедура
синхронизации и анализа битовых ошибок
может быть организована на основе
указания на начало цикла или на основе
проверки правильности перевода слов и
предложений. Вторая процедура наиболее
часто используется в практике.
Использование
фиксированных последовательностей
рекомендовано главным образом для
стрессового тестирования аппаратуры
кодирования/декодирования. Поэтому
наиболее часто используются тестовые
последовательности со множеством нулей.
Как известно, при передаче двоичной
последовательности наличие
последовательности из нескольких нулей
равносильно отсутствию сигнала (0 обычно
передается сигналом нулевой амплитуды).
В результате генерации последовательностей
со множеством нулей можно проанализировать
работу канала в случае естественного
пропадания сигнала.
Например, в
системах ИКМ (поток Е1) в недавнем прошлом
использовался линейный код AMI, в котором
от-сутствуem устойчивость битовой
синхронизации при появлении длинных
последовательностей нулей. В результате
необходим анализ частоты сбоев битовой
синхронизации измеряемого канала с
кодированием AMI. Для измерений обычно
используются промышленные стандарты
с длинными последовательностями нулей
— 1-4, 1-8 или 3-24. Длинная последовательность
нулей в этом случае создает возможность
сбоя битовой синхронизации, фиксируемого
как битовые ошибки при передачи единиц.
Неустойчивость
битовой синхронизации в случае появления
длинных последовательностей нулей
кодирования AMI было преодолено в
современном коде HDB3 ИКМ-систем, где
используется процедура инверсии шестого
нуля в алгоритме кодирования.
Работоспособность этой процедуры можно
проверить при помощи промышленных
стандартов с длинными последовательностями
нулей — 1-4, 1-8 или 3-24. Кроме того, стабильность
битовой синхронизации может быть
проверена генерацией последовательности
0000.
Вторым направлением
стрессового тестирования является
анализ систем передачи с заполнением.
Например, в некоторых
ИКМ-системах при организации транзита
сбой на удаленном конце приводит к тому,
что поток Е1 заполняется единицами. Эта
процедура используется для имитации
сбоя: передатчик генерирует
последовательность 1111 и анализирует
сигнал AIS, передаваемый принимающей
стороной.
Наличие систем с
заполнением требует с особенной
осторожностью использовать при измерениях
фиксированные последовательности. В
некоторых случаях фиксированная
последовательность может совпадать с
последовательностью заполнения, что
может привести к ошибочным результатам.
Известен случай
анализа спутникового канала по параметру
ошибки (ВЕR), при этом использовалась
альтернативная последовательность
1010, которая совпала с последовательностью
заполнения выходного канала передачи
данных от модема. В результате даже
после пропадания радиочастотного
спутникового канала анализатор выдавал
результат по параметру ошибки BER=10-5
Чтобы избежать
подобных ситуаций, рекомендуется
использовать фиксированные
последовательности в виде слов или
предложений (например, применение
последовательности FOX в описываемом
примере сразу идентифицировало
неготовность канала) или псевдослучайной
последовательности (ПСП).
Псевдослучайные
последовательности характеризуются
количеством регистров сдвига, используемых
при генерации N с длинной цикла
последовательности L=2N
— 1. Структура псевдослучайной
последовательности связана со схемой
генератора ПСП, представленной на
рисунке 9.
Рисунок 9 — Генератор
псевдослучайной последовательности
В основе принципа
работы генератора ПСП лежит процедура
сверточного кодирования с использованием
N регистров сдвига с одной обратной
связью перед регистром N. Это экви
валентно кодеру сверточного кодирования
с полиномом Dn+Dn+1+l.
Соответственно длина кодированной
последовательности зависит от количества
регистров сдвига и составляет 2N-L
Процедура предусматривает циклическое
повторение последовательности через
2N-1
тактовых импульсов (эквивалентно,
битов). Большее количество регистров
определяет меньшую повторяемость
последовательности.
Для анализа
принимаемой ПСП используются два типа
анализаторов, схемы которых представлены
на рис. 6.5 и 6.6. Наиболее часто используется
метод анализа ПСП с обратной связью
(рис. 10). В этом случае последовательность
синхронизируется следующим образом:
петля обратной связи размыкается, данные
загружаются в регистры сдвига до полного
заполнения, затем петля обратной связи
замыкается и производится синхронизация
по тестовой последовательности. Две
несинхронные ПСП имеют относительный
параметр BER приблизительно равный 0,5,
таким образом, для достижения синхронизации
по тестовой последовательности критерий
синхронизации выбирается ниже этого
значения.
Рисунок 10 — Анализатор
ПСП с замкнутой обратной связью, метод
побитового измерения ошибок
Рисунок 11 — Анализатор
ПСП без обратной связи
Вторым методом
построения анализатора ПСП является
метод без обратной связи (рис. 11). Этот
метод в настоящее время практически не
используется и признан устаревшим.
Основным недостатком его является
наличие процессов подавления данных
при измерениях каналов с высоким
параметром ошибки. Метод был разработан
для низкого параметра ошибки в
предположении, что сами ошибки возникают
случайным образом и описываются
нормальным распределением.
Современные системы
передачи используют алгоритмы кодирования
и принципы передачи, приводящие к
появлению всплесков ошибок, возникающих
в виде пакетов. В этом случае алгоритм
анализа без обратной связи характеризует
нестабильную работу.
В дальнейшем при
описании анализа ПСП будем исходить из
принципов анализа с обратной связью.
В современной
практике используются следующие типы
псевдослучайных последовательностей:
2е23 — стандартная
2е23-1
псевдослучайная последовательность
битов. Сигнал формируется из 23-фазного
регистра сдвига без ограничения нулей.
Эта последовательность соответствует
техническому стандарту ITU 0.151. Получила
распространение для тестирования
высокоскоростных цифровых каналов
первичной сети (например, каналов SDH).
2е20 — стандартная
2е20-1
псевдослучайная последовательность
битов. Сигнал формируется из 20-фазного
регистра сдвига без ограничения нулей.
Эта последовательность соответствует
техническому стандарту ITU 0.151.
2е15 — стандартная
2е15-1
псевдослучайная последовательность
бит. Сигнал формируется из 15-фазного
регистра сдвига без ограничения нулей.
Последовательность может содержать до
14 нулей в строке. Последовательность
получила наиболее широкое распространение
для анализа каналов PDH с относительно
невысокой скоростью передачи.
20ITU — стандартная
2е20-1
псевдослучайная последовательность
бит. Сигнал формируется из 20-фазного
регистра сдвига без ограничения нулей.
Последовательность соответствует
техническому стандарту ITU 0.153. Однако,
эта последовательность отличается от
2е20 последовательности, потому что
используются разные механизмы обратной
связи. 20ITU подавляет последовательности
из более чем 18 нулей, в отличие от 14 нулей
в 2е20.
2047 — короткая ПСП.
Сигнал формируется из 11 -фазного регистра
сдвига без ограничения нулей. Стандартный
2047-битный код используется для анализа
вторичных сетей передачи данных,
приложений DDS и ISDN.
511 — короткая ПСП.
Сигнал формируется из 9-фазного регистра
сдвига без ограничения нулей. Стандартный
511-битный код применяется для анализа
вторичных сетей передачи данных, в
частности он соответствует техническому
стандарту ITU V.52.
127 — короткая ПСП.
Сигнал формируется из 7-фазного регистра
сдвига без ограничения нулей. Стандартный
127-битный код используется для анализа
низкоскоростных каналов передачи данных
(например, модемных каналов).
63 — самая короткая
ПСП, применяемая в практике измерений.
Сигнал формируется из 6-фазного регистра
сдвига без ограничения нулей. Стандартный
63-битный код применяется для анализа
низкоскоростных каналов передачи данных
(например, модемных каналов).
Таким образом,
основными характеристиками ПСП являются:
-
длина последовательности
в битах; -
вид полинома,
соответствующая конфигурация регистров
генератора и анализатора ПСП; -
спектральный
состав сигнала, зависящий от скорости
передачи в канале.
Спектральный
состав псевдослучайной последовательности
схематически представлен на рис. 6.7.
В зависимости от
скорости передачи данных в канале
используются ПСП различной длины: чем
больше скорость, тем большая длина
последовательности допускается.
Рекомендация ITU-T 0.151 определяет значения
используемых длин ПСП в зависимости от
скорости цифровой передачи в канале
согласно таблице 1. Кроме того существует
также рекомендация по выбору тестовой
последовательности для канала 64 кбит/с
— 211-1,
приведенная в ITU-T рекомендация 0.152.
Рисунок 12 —
Спектральный состав ПСП с кодированием
NRZ
Таблица
1 — Длины тестовых последовательностей
ПСП (ITU-T рекомендация О.151)
|
Скорость передачи, |
Длина ПСП |
Конфигурация
кодера |
Спектральное
∆f, |
|
64 |
215-1 |
D15+D-14+1=0 |
1,95 |
|
2048 |
215-1 |
D15+D-14+1=0 |
62,5 |
|
8448 |
215-1 |
D15+D-14+1=0 |
257,8 |
|
34368 |
223-1 |
D23+D-18+1=0 |
4,1 |
|
139264 |
223-1 |
D23+D-18+1=0 |
16,6 |
Основным требованием,
предъявляемым к спектральному расстоянию
∆f,
является возможность успешной
синхронизации при наличии на приемной
стороне относительно узкополосной цепи
синхронизации от входящего потока. В
этом случае требуется малое расстояние
между двумя субгармониками принимаемого
сигнала. При большом расстоянии может
возникнуть джиттер регистров сдвига.
Механизм возникновения джитnера довольно
простой: длинная последовательность
нулей, характерная для ПСП большой
длины, приводит к накоплению фазовой
ошибки за время ее передачи. Такой
джиттер обусловлен алгоритмом работы
генератора ПСП, его структура зависит
от конфигурации генератора, кроме того,
джиттер регистров сдвига в общем случае
отличается по параметрам от джиттера
в цифровом канале.
Чтобы избежать
появление джиттера регистров сдвига
используются рекомендованные ПСП.
3.2 Методы
вычисления параметров ошибок в цифровых
каналах.
Параметр ошибки
по битам BER по праву считается основным
параметром тестирования любых цифровых
каналов и систем. Параметр BER связан
интегральным соотношением с функцией
распределения вероятности возникновения
ошибки в цифровом канале. Таким образом,
параметр ВЕR
является наиболее распространенной
статистической характеристикой
параметров качества работы канала. По
отношению к измеряемым величинам этот
параметр является вторичным и вычисляется
на основании данных о количестве
принимаемых ошибок в тестовой
последовательности в различные периоды
времени, поэтому необходимо говорить
о методах расчета параметра BER по данным
о количестве ошибок.
Существует несколько
алгоритмов анализа ошибок в принимаемом
потоке с ПСП. Рассмотрим, как по данным
об ошибках рассчитывается параметр
BER. На рисунке 13 представлены три основных
алгоритма такого расчета.
Рисунок 13 — Методы
измерения параметра BER
Известно, что в
процессе измерения существует две точки
синхронизации измерений: начало измерения
и время, при котором достигается заданный
порог ошибки (на рисунке -100 ошибок).
Выбор параметра ERR = 100 основан на
предположении нормального распределения
возникновения ошибок. В этом случае
относительная погрешность измерений
определяется как:
![]()
где N—
количество ошибок.
Учитывая, что для
большей части эксплуатационных измерений
относительная погрешность в 10 % является
вполне допустимой, в качестве границы
интервала синхронизации может быть
выбрано время ERR = 100. Таким образом, все
время измерений разбивается на два
интервала, от начала измерений до точки
ERR=100 и после этой точки. Соответственно
различаются три метода подсчета BER.
Первый метод
предусматривает расчет отношения ВЕR
после приема первых 100 ошибок, что
автоматически гарантирует высокую
точность измерения (лучше 10%). Однако от
начала измерения до получения результата
необходимо некоторое (иногда достаточно
большое) время.
Второй метод
предусматривает расчет отношения
непосредственно после начала измерения
без привязки к количеству принятых
ошибок по битам. В этом случае для
обеспечения точности измерений расчет
отношения делается после приема
определенного количества битов (на
рисунке — 106),
а точность измерения определяется
пороговым значением количества принятых
битов. Обычно предполагается, что
точность на порядок хуже обратного
значения количества принятых битов (на
рисунке 13 точность измерения BER = 10-5
сразу после начала расчета отношения).
В отличие от первого метода этот метод
обеспечивает определенное время начала
отображения результата измерений. С
точки зрения алгоритма проведения
эксплуатационных измерений по параметру
ошибки, многие из которых носят иногда
оценочный характер, такая методика
подсчета является наиболее эффективной
и получила наибольшее распространение.
Отрицательной стороной методики является
необходимость учета количества
переданных/принятых битов ПСП при
анализе результата, поэтому отношение
вычисляется математически без указания
точности измерений в каждый конкретный
момент. Например, если прибор показывает
BER = 10-12
при общем количестве принятых битов
108,
то необходимо констатировать — измерение
параметра BER лучше 10-7,
но не более, поскольку этим значением
ограничена точность измерения. В первом
методе такой ситуации не может возникнуть,
поскольку измерение делается заведомо
с точностью 10 % и лучше.
Наконец, третий
метод, используемый в некоторых
индикаторах, предусматривает вычисление
BER точно после приема 100 ошибочных битов.
Этот метод является модификацией первого
метода со свойственными ему негибкостью
в отображении результатов эксплуатационных
измерений и необходимостью ожидания
до индикации результата.
Таким образом,
наибольшее распространение в современной
практике получил второй метод, однако
он обычно не обеспечивает автоматического
учета точности измерений, что необходимо
при проведении эксплуатационных тестов.
Вторым наиболее
часто используемым параметром при
анализе цифровых каналов является
количество секунд, пораженных ошибками
(ES). Этот параметр является вторым по
важности после BER. Если параметр BER
определяет средний интегральный уровень
качества цифровой передачи в канале,
то параметр ES и, в особенности, обратный
к нему параметр EFS, определяют долю
общего времени, в течении которого канал
является свободным от ошибок, т.е. время,
в течении которого оператор гарантирует
бесперебойную цифровую передачу по
каналу. Таким образом, этот параметр
является крайне важным для операторов
цифровых систем передачи первичной и
вторичных сетей. Параметр ES вошел во
все основные рекомендации и нормы на
параметры цифровых каналов (например,
в рекомендации ITU-T G.821, G.826 и М.2100).
По отношению к
измеряемому параметру — количеству
принятых ошибочных битов — параметр ES
также, как и параметр BER является
вторичным. Метод его подсчета тесно
связан с определениями, даваемыми этому
параметру в европейской (одобренной
ITU-T) и американской практиках.
В европейской
практике параметр EFS определяется как
все односекундные интервалы времени,
не содержащие ошибок в течении интервала
измерений. С точки зрения методики
подсчета ES это определение означает
использование асинхронного метода
(рис. 13). Асинхронный метод предусматривает
разделение всего времени измерений на
интервалы по 1 с и подсчет количества
интервалов, в течении которых принималась
одна или несколько битовых ошибок.
В американской
практике измерений получил распространение
метод синхронного подсчета ES, согласно
которому секундой, пораженной ошибками,
называется односекундный интервал,
следующий за появлением ошибки. В
результате измерение параметра ES
синхронизируется со временем появления
ошибок.
Как видно из рисунка
14, применение двух описанных методов к
реальной ситуации дает различные
результаты. Точный анализ показывает,
что методы дают близкие результаты
только в предположении малого параметра
ES и нормальной функции распределения
вероятности возникновения ошибки. В
случае возникновения ошибок в виде
пакетов разница в параметрах, измеренных
разными методами, может достигать 18%.
Проведенные рабочими группами ITU-T
исследования показали, что большая
часть цифровых систем передачи (в
особенности радиочастотные системы
передачи с различными методами
помехозащищенного кодирования) при
работе дают именно пакетное распределение
ошибок.
Рисунок 14 — Методы
подсчета параметра ES
Каждый метод имеет
свои преимущества и недостатки.
Преимуществом асинхронного метода
измерения является простота его
реализации в конкретных приборах, а
метода синхронного подсчета — его
инвариантность относительно выбора
времени начала измерения, что приводит
к следующим важным следствиям:
-
результаты,
измеренные разными приборами одновременно
на одном канале, точно совпадают; -
результаты,
полученные при измерениях в различных
частях цифрового канала, точно совпадают
при условии, что канал не вносит
дополнительных ошибок; -
результаты,
полученные методом синхронного подсчета,
более отражают смысл измерения ES как
общего времени негарантированной
цифровой передачи, и могут использоваться
операторами для гибкого регулирования
тарифной политики и т.д.
Таким образом,
использование метода синхронного
подсчета параметра ES представляет
оборудование систем передачи в более
выгодном свете, однако результаты таких
измерений являются инвариантными ко
времени начала теста и учитывают
возможное распределение ошибок в виде
пакетов.
Основным недостатком
синхронного метода подсчета параметра
ES является вторичное значение другого
важного параметра — EFS. Действительно в
контексте методологии синхронного
измерения ES параметр EFS невозможно
определить явно, а только как производную
параметра ES.
Для проведения
измерений без отключения цифрового
канала используются алгоритмы анализа
избыточного циклового кода. Алгоритм
такого анализа представлен на рисунке
15.
Рисунок 15 — Алгоритм
использования избыточного циклового
кода
Алгоритм использования
избыточного циклового кода следующий:
информационный поток, передаваемый
затем по цифровому каналу, разбивается
на несколько блоков данных фиксированного
размера. Для каждого блока данных
последовательность битов делится на
полином заданного вида (в зависимости
от типа кода). В результате деления
образуется остаток, передаваемый вместе
с блоком данных в составе цикла (кадра)
в канале. Процедура деления потока
данных на блоки и передача их с рассчитанным
остатком от деления приводит к
необходимости использования в аппаратуре
передачи цикловой структуры. Таким
образом, измерения параметров ошибки
без отключения канала возможны только
для систем передачи с цикловой структурой.
Остаток от деления передается в составе
цикла в виде контрольной суммы. На
приемной стороне делаются аналогичные
вычисления остатка от деления, результат
расчета сравнивается с переданной
контрольной суммой. Расхождение
результатов свидетельствует о наличии
битовой ошибки в блоке.
При такой методологии
блок анализируется в целом. В блоке
регистрируется только одна ошибка,
остальные ошибки в составе этого блока
не локализуются. Кроме того, допустима
компенсация ошибок друг другом. Как
следствие, параметры BER и CRC ERR при
измерениях могут не совпадать друг с
другом. Точность измерений без отключения
канала параметра ошибки эквивалентна
измерениям BLER и зависит не от количества
переданных битов, а от количества
переданных блоков, т.е. точность измерений
ниже.
Единственным и
главным преимуществом методики измерения
без отключения канала является возможность
измерения на реально работающем канале.
Для эксплуатационного Мониторинга
качества цифровых систем передачи
возможность таких измерений очень
важна, что и обусловило широкое
распространение этой методологии
измерений. В настоящее время именно
такие алгоритмы измерений используются
во встроенных системах самодиагностики
современных цифровых систем передачи
и во вторичных сетях передачи данных.
В зависимости от типа цикловой структуры
используются различные типы цикловых
кодов, некоторые из которых представлены
в табл. 2.
Таблица 2 — Основные
типы кодов, используемые для измерения
параметра ошибки без отключения каналов
|
Тип кода |
Полином кода |
Количество битов |
Использование |
|
CRC-6 |
Х6+Х+1 |
6 |
DS1 |
|
CRC-4 |
Х4+Х+1 |
4 |
Е1 |
|
CRC-16 |
Х16+Х12+ |
16 |
HDLC, |
|
CRC-32 |
Х32+Х26+Х23+Х22+
Х16+Х12+Х11+Х10+Х8+ |
32 |
SMDS, |
Помимо алгоритма
подсчета параметров ошибок в цифровом
канале на результаты измерений может
оказывать существенное влияние время
проведения измерений, причем как
длительность этого времени, так и выбор
времени проведения тестов по отношению
к трафику сети.
Проблемы выбора
параметров длительности проведения
тестов связаны с необходимостью
объективации результатов измерений.
Действительно, при анализе параметров
многоканальной системы передачи, в
которой для измерений задействована
лишь часть емкости, возникают два
основных вопроса: «Действительно ли
измеренные параметры соответствуют
всей системе передачи или только каналу,
в котором проводятся измерения?» и
«Будут ли сохраняться результаты
.измерений постоянными в течении суток?».
Предположим, что
в течении определенного времени
проведения измерения в цифровом канале
зарегистрировано количество N ошибок.
Для оценки достоверности измерений
обычно используется статистическая
модель со случайным возникновением
ошибок, т.е. рассчитывается коэффициент
достоверности результата как среднее
отклонение от измеренной величины.
Коэффициент достоверности позволяет
оценить реальный параметр ошибки в
предположении наихудшего варианта и
широко используется в методологии
измерений цифровых каналов.