-
Динамическая ошибка сау. Нахождение коэффициентов ошибок.
Помимо статистических
ошибок точность работы систем
радиоавтоматики характеризуется
динамическими и переходными ошибками.
Динамическая
ошибка – ошибка в установившемся режиме
работы системы при действии на неё
нестационарного сигнала.
Переходная ошибка
– ошибка при работе системы в переходном
процессе, который возникает при отработке
начального рассогласования.
Динамическая
точность работы систем радиоавтоматики
определяется при медленно изменяющихся
входных сигналах (воздействия, число
производных от которых ограничено).
Cигнал

относится
к медленно изменяющемуся воздействию,
так как число производных от этого
сигнала неравных нулю, равно
,
а

-я
производная равна нулю. Гармонический
сигнал не является медленно изменяющимся,
так как число производных от него равно

.
Переходные процессы
в системах радиоавтоматики затухают
значительно быстрее по сравнению с
изменением медленно изменяющегося
сигнала, поэтому и достигается
установившейся динамический режим
работы системы.
По определению
передаточной функции рассогласования
преобразование Лапласа для ошибки
системы:

(6.1)
или
в области действительного переменного

(6.2)
Число слагаемых
в последнем выражении ограничено, так
как сигнал

является медленно изменяющимся
воздействием. Для нахождения неизвестных
коэффициентов

,
которые называются коэффициентами
ошибки, известны три способа.
1)
2) Вторым способом
коэффициенты ошибок находятся путём
деления числителя передаточной функции
ошибки на её знаменатель.
3) Для реализации
третьего способа представим передаточную
функцию ошибки в виде:

.
Перемножив полином
знаменателя на (6.1), получим:

(6.3)
Приравняв
коэффициенты при одинаковых степенях

слева и справа в выражении (6.3), определим
формулы для последовательного вычисления
коэффициентов ошибок:

2 Влияние на ошибку системы коэффициента усиления системы и введение форсирующего звена
В
инженерных расчётах коэффициенты ошибок
удобнее рассчитывать через коэффициенты
передаточной функции разомкнутой
системы:

,
(6.4)
где

—
порядок астатизма системы.
Первое
слагаемое в выражении (6.2) называют
ошибкой по положению, а коэффициент

-коэффициентом
ошибки по положению, второе слагаемое
– ошибкой по скорости, а коэффициент

—
коэффициентом ошибки по скорости.
Аналогично, третье слагаемое в (6.2)
называют ошибкой по ускорению, а
коэффициент

— коэффициентом ошибки по ускорению.
В
астатических системах
первых коэффициентов ошибок равны нулю,
где
—
порядок астатизма системы радиоавтоматики.
При
анализе качества работы систем
радиоавтоматики помимо вычисления
ошибок при медленно изменяющихся
сигналах приходится оценивать точность
и при гармонических воздействиях. В
этом случае нельзя применять метод
коэффициентов ошибок, так как число
производных от гармонического сигнала
не ограничено. При этом для расчёта
ошибок необходимо использовать частотные
характеристики. По амплитудно-частотной
характеристике ошибки вычисляется
амплитуда колебаний ошибки, по
фазочастотной характеристике – сдвиг
колебаний ошибки относительно входного
сигнала.
Пример
6.1. Найти динамическую ошибку при входном
сигнале
следящей системы, передаточная функция
которой в разомкнутом состоянии

.
Преобразуем

.
Коэффициент
астатизма

.Тогда

,

,

.
Подставим
данные в выражение (2), получим:

Вывод.
При увеличении коэффициента усиления
системы и введении форсирующего звена
ошибка уменьшается, увеличение же
постоянных времени инерционных звеньев
ухудшает динамическую ошибку системы.
3
Средняя
квадратическая ошибка системы.
В
большинстве случаев закон распределения
ошибки системы можно считать гауссовским,
поэтому для расчёта составляющих
суммарной средней квадратической ошибки
достаточно учесть математическое
ожидание и корреляционную функцию
ошибки или её спектральную плотность.
На
вход системы подаётся воздействие вида:

,
где
—
случайный сигнал;

— случайная помеха.

—
cуммарная
ошибка системы, где

— выходной сигнал системы.
Рис.
7.1. К определению суммарной ошибки
На
приведённом рисунке круг означает
сумматор, а сектор круга со знаком минус
означает операцию вычитания.
Преобразование
Лапласа для суммарной ошибки:

(7.1)
Вывод.
Суммарная ошибка состоит из двух
составляющих, одна из которых, определяющая
точность воспроизведения сигнала,
зависит от передаточной функции ошибки,
вторая, обусловленная действием помехи,
— от передаточной функции замкнутой
системы.
Предположим,
что сигнал и помеха являются стационарными
случайными функциями. Тогда математическое
ожидание помехи

,
а случайный сигнал представим в виде:

,
где

—
математическое ожидание сигнала;

— случайная составляющая сигнала.
Математическое
ожидание суммарной ошибки рассчитывают
по теореме о конечном значении функции:

.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Определение динамических ошибок (по
скорости, по ускорению) для статической и астатических систем.
Точность АС
характеризуется величиной ошибки в установившемся режиме и зависит от характера
воздействия, а также структуры и параметров системы.
Реальные воздействия
в радиотехнических следящих системах описывается сложными (случайными)
функциями времени. Однако при анализе точности управления часто используют
простые детерминированные воздействия: постоянное ступенчатое, линейное,
квадратичное и другие. Это позволяет упростить анализ и в то же время сохранить
в модели задающего воздействия наиболее существенные признаки (начальное
значение, скорость изменения, ускорение). Большинство систем радиоавтоматики
описываются передаточными функциями вида
 , (11.1)
, (11.1)
где Ki — общее усиление
разомкнутой системы, i – число интегрирующих
звеньев, определяющее порядок астатизма системы;
– полиномы, порядок которых определяется числом типовых
звеньев (n и m соответственно инерционных и форсирующих), а
коэффициенты полиномов – постоянными времени типовых звеньев.
11.1. Статические ошибки
Ошибка системы при постоянном
(ступенчатом) воздействии x(t)=x0=const при t³0
называется статическойeст.
Для установившейся
ошибки, учитывая, что изображение X(p)=x0/p,
запишем:
 . (11.2)
. (11.2)
Для статической
системы (не содержащей интегрирующих звеньев) статическая ошибка равна
 . (11.3)
. (11.3)
Таким образом, в
статических системах установившееся значение управляемой переменной не равно
заданному: меньше на величину ошибки, значение которой обратно пропорционально
усилению К0 по постоянному току (обычно К0>>1).
Для астатических
систем (i ³ 1) ошибка при постоянном воздействии
![]() ,
,
так как числитель в (11.2) равен нулю, а знаменатель равен
Кi.
Отсутствие
статической ошибки обусловило название таких систем – астатические.
11.2. Динамические ошибки
Ошибка,
характеризующая точность замкнутой системы при меняющемся воздействии,
называется динамической eд(t).
Любое детерминированное
воздействие (при условии существования его производных d(k)/dt(k),
k=1, 2, …) можно представить в виде ряда
 , (11.4)
, (11.4)
где x0 — начальное значение, ![]() — скорость изменения,
— скорость изменения, ![]() — ускорение и т. д.
— ускорение и т. д.
Для вычисления
динамических ошибок при типовых воздействиях (линейном и квадратическом)
представим выражение для ошибки в операторной форме:
![]() (11.5)
(11.5)
Используя разложение
передаточной функции Ke(p) в ряд Маклорена по степеням
переменной р, перепишем (11.5) в виде
 (11.6)
(11.6)
где C0, C1, C2,
… — коэффициенты ошибок, определяемые
как
 (11.7)
(11.7)
Установившееся
значение ошибки при произвольном воздействии x(t)
на основании (11.6) определяется временным рядом
 (11.8)
(11.8)
Чем меньше
коэффициенты ошибок, тем выше точность системы при произвольном
детерминированном воздействии. При вычислении коэффициентов Ck
обычно ограничиваются только первыми тремя (для систем с астатизмом не выше
второго порядка).
Коэффициент C0
в соответствии с (11.7) равен
 .
.
Для статических
систем (i=0) C0=1/(1+K0), а для
астатических систем C0=0.
Определим динамические
ошибки типовых систем при линейном воздействии (изменение с постоянной
скоростью) x(t)=nxt.
В соответствии с
формулой (11.8) динамическая ошибка (ошибка по скорости) определяется как
![]() .
.
Для статической
системы она равна
так как вклад составляющей C1nx
значительно меньше, чем C0 x(t), которая растет
линейно со временем. Таким образом, скоростная ошибка в статических системах
накапливается со временем со скоростью nx/(1+K0), что делает неприемлемым использование
таких систем при меняющемся воздействии. Для астатических систем C0=0 и скоростная ошибка
![]() .
.
Нахождение
коэффициента ошибки C1 с использованием формулы (11.7)
затруднительно. Более простой способ его вычисления основан на сравнении
точного выражения для передаточной функции Ke(p) и
аппроксимирующего ее ряда:
 (11.9)
(11.9)
Уравнение (11.9)
можно представить в виде
 (11.10)
(11.10)
Полагая i= 1 (астатическая система первого порядка) и приравнивая
коэффициенты при переменной p в левой и правой частях уравнения, находим
![]()
или C1=1/K1, так как C0=0.
Таким образом,
скоростная ошибка системы первого порядка астатизма eд=nx/K1
определяется усилением разомкнутой системы K1 и не зависит от
времени. Параметр K1, имеющий размерность c –1,
называется добротностью системы по скорости (чем выше добротность, тем
точнее система).
Для астатической
системы второго порядка скоростная ошибка равна нулю, так как оба коэффициента C0=C1=0.
Равенство C1=0 вытекает из уравнения (11.10), так как в
правой части уравнения не содержится слагаемого, в которое входит переменная p
(есть только с p2 и выше).
Оценим динамические
ошибки типовых систем при квадратичном воздействии (изменение с постоянным
ускорением)![]() .
.
В соответствии с (11.8)
для динамической ошибки (ошибки по ускорению) запишем
 . (11.11)
. (11.11)
Для статической
системы ошибка по ускорению равна
 (11.12)
(11.12)
так как составляющие ошибки с коэффициентами C1 и C2
вносят пренебрежимо малый вклад в результирующую ошибку. Накопление ошибки по
квадратичному закону исключает применение статических систем при наличии
ускорения.
Для системы первого
порядка астатизма ошибка по ускорению равна
 (11.13)
(11.13)
(вкладом составляющей ![]() можно
можно
пренебречь). Накопление ошибки со временем (со скоростью ![]() ) не позволяет применять такие
) не позволяет применять такие
системы при наличии ускорения. Для астатической системы второго порядка ошибка
по ускорению равна
 . (11.14)
. (11.14)
Определение
коэффициента ошибки C2 с использованием уравнения (11.7)
сводится к приравниванию коэффициентов при p2 в обеих частях
уравнения:
 . (11.15)
. (11.15)
Откуда
C2/2=1/K2, так как C0=C1=0.
Измерительные каналы являются наиболее сложной частью систем автоматизации и требуют глубоких знаний для получения достоверных результатов измерений. Качество полученных данных зависит не только от погрешности средств измерений, вовремя выполненной поверки или калибровки, но в большей степени от корректности методики измерений, правильности выполнения системы заземления, экранирования и кабельной разводки [1]. Измерительные каналы систем автоматизации, в отличие от измерительных приборов, создаются в полевых условиях, что является причиной появления ошибок, которые не всегда удаётся обнаружить. Множество проблем возникает при выполнении статистической обработки результатов измерений, при стремлении достичь предела разрешающей способности системы, при выполнении косвенных, совместных и многократных измерений.
Для получения достоверных результатов требуются знания в области метрологии, математической статистики, теории случайных процессов, теории информации и электроники. Это самостоятельные объёмные области знаний, которые являются темой множества учебников и монографий. Поэтому далее в статье рассматриваются только наиболее важные вопросы измерений в промышленной автоматизации, которые часто понимаются неправильно или неоднозначно.
Измеряемые физические параметры обычно изменяются с течением времени, поэтому для оценки точности измерений необходимо знать, как зависит погрешность измерений от динамических характеристик измеряемой величины, то есть какова динамическая компонента погрешности измерений. Несмотря на то что динамическая погрешность очень часто в несколько раз превышает статическую, её редко принимают во внимание, поскольку измерить величину этой погрешности технически достаточно сложно и необходимые для этого приборы часто отсутствуют. Так, в пользовательской документации на устройства аналогового ввода, как правило, отсутствует информация, необходимая для оценки динамической погрешности (импульсная, переходная, амплитудно-частотная и фазочастотная характеристики, амплитудно-фазовая или передаточная функция).
Другой проблемой, которая имеет место при вводе аналоговой информации в компьютер или контроллер, является появление алиасных (ложных) частот, которые снижают точность измерений. Опасность этого явления заключается в том, что помехи, лежащие гораздо выше частоты дискретизации, могут трансформироваться в низкочастотную область, если в измерительном канале неправильно выбран или отсутствует антиалиасный фильтр. Антиалиасный фильтр необходим для уменьшения помех на входе средства измерений, однако его наличие приводит к возникновению динамической погрешности.
Далее описываются причины возникновения динамической погрешности и пути её оценки.
Теорема Котельникова
В системах автоматизации самой распространённой операцией является дискретизация сигнала по времени. Выбор частоты дискретизации опирается на теорему Котельникова, которая распространяется на любые сигналы с ограниченным спектром. Если спектр сигнала ограничен частотой fmax, то частота отсчётов должна быть в 2 раза выше, чтобы сигнал можно было восстановить без потери информации. Иначе говоря, если самая высокочастотная гармоника в спектре сигнала имеет период T, то на один период гармоники должно приходиться 2 отсчёта при дискретизации сигнала – при этом непрерывный сигнал преобразуется в импульсный без потери информации.
Отметим несколько особенностей применения теоремы.
Во-первых, в теореме Котельникова предполагается, что сигнал s(t) будет восстановлен с помощью замены каждого отсчёта функцией sin(x)/x, то есть
где τ – интервал между отсчётами, k – номер отсчёта, t – время. Однако на практике такую функцию реализовать невозможно, поскольку её спектральная характеристика является идеально прямоугольной и для её получения требуется фильтр с идеально прямоугольной АЧХ. Поэтому восстановление сигнала после дискретизации выполняют с помощью фильтров невысоких порядков.
Во-вторых, сигналы с ограниченным спектром имеют бесконечную протяжённость во времени, а реальные сигналы, ограниченные во времени, имеют неограниченный частотный спектр, поэтому разложение их в ряд Котельникова требует пренебрежения частью спектра, лежащего выше частоты fmax.
В-третьих, теорема Котельникова предполагает, что при дискретизации сигнала использованы импульсы бесконечно малой длительности.
Указанные факторы являются причиной того, что на практике частоту дискретизации выбирают в несколько раз выше, чем требуется в соответствии с теоремой Котельникова.
Теорема Котельникова позволяет оценить предельную пропускную способность измерительного канала с известной полосой пропускания fс. Если средство измерений имеет погрешность Δ, то количество различимых уровней при измерении величины x будет равно x/Δ, а количество информации, полученное при однократном измерении, будет равно log2 [(x+Δ)/Δ]. Если систематическая составляющая погрешности исключена и преобладает случайная составляющая с дисперсией Δ2, то количество различимых уровней следует искать как отношение мощностей, то есть количество информации будет равно
.jpg)
где Pс – мощность сигнала, Pш – мощность погрешности. Поскольку в соответствии с теоремой Котельникова сигнал со спектром шириной fс должен быть дискретизирован с частотой 2fс, чтобы сохранить всю содержащуюся в нём информацию, то для сигнала длительностью T потребуется 2Tfс отсчётов. Следовательно, измерительный канал с полосой fс позволяет передать 2Tfс отсчётов, каждый из которых содержит 1/2 log2 [(Pc + Pш)/Pш] бит информации, то есть пропускная способность канала (количество передаваемой информации в единицу времени) составит
.jpg)
Величина 2Tfс называется базой сигнала, Tfсlog2[(Pс+Pш)/Pш] – объёмом сигнала, log2 [(Pс+Pш)/Pш] – динамическим диапазоном.
Фильтр и динамическая погрешность
Измеряемая величина в системах автоматизации обычно не является постоянной во времени. Поэтому возникает вопрос: насколько медленно она должна изменяться, чтобы погрешность измерения не превышала заданного значения? Для ответа на этот вопрос используется понятие динамической погрешности.
Нормированию динамических погрешностей уделено недостаточно внимания как в нормативной литературе, так и в эксплуатационной документации средств измерений. Так, динамические характеристики, необходимые для оценки динамической погрешности, как правило, отсутствуют в пользовательской документации на модули аналогового ввода, за редким исключением (например, модули аналогового ввода RealLab! серии NL содержат необходимую информацию).
Оценка величины динамической погрешности является сравнительно сложным процессом. Проблема возникает потому, что динамическая погрешность зависит не только от динамической модели измерительного канала, но и от формы измеряемого сигнала.
Основными источниками динамической погрешности являются естественная инерционность физических процессов, протекающих в датчиках, процессы заряда входной ёмкости измерительного устройства, инерционность фильтров, использованных для устранения алиасного эффекта и подавления помех в измерительном канале.
Для количественного описания динамических свойств измерительного канала используют линейные динамические модели в виде дифференциальных уравнений, операторных передаточных функций, импульсных переходных характеристик или реакций на единичный скачок, амплитудно-частотные и амплитудно-фазовые характеристики (ГОСТ 8.256-77 [2]). Описание этих моделей может быть указано в эксплуатационной документации на средство измерений. Идентификацию динамической модели средства измерений выполняет его разработчик, используя те же методы, что и при идентификации объекта управления.
В некоторых случаях, например, когда уравнения динамической модели пользователю известны, могут быть заданы только коэффициенты уравнений, постоянные времени, время реакции (время установления), коэффициент демпфирования, полоса пропускания по уровню 0,707 и др. Для модулей аналогового ввода может быть также задана погрешность положения отсчёта измеряемого сигнала на оси времени.
Рассмотрим типовую динамическую модель измерительного канала (рис. 1), которая включает в себя модели датчика Wд(s) и модуля ввода аналоговых сигналов W(s). Передаточная функция W(s) обычно представляет собой произведение передаточных функций антиалиасного фильтра, стоящего до АЦП, и цифрового режекторного фильтра, стоящего после АЦП. Измерительный преобразователь часто входит в состав модуля ввода.
При проектировании системы автоматизации динамические характеристики её звеньев можно выбрать так, что инерционность всего измерительного канала будет определяться инерционностью самого медленного звена. Это существенно упрощает процесс оценки величины динамической погрешности. Например, при измерении температуры самым инерционным звеном должен быть датчик; инерционность термопар характеризуется постоянной времени в десятки секунд и намного превышает инерционность модуля ввода (доли секунды).
Многоканальные средства измерений бывают двух типов: с коммутацией источников сигнала и с параллельно работающими каналами. В первом случае на входе модуля ввода используется аналоговый коммутатор (рис. 1), во втором случае коммутатор не используется, а многоканальность достигается применением нескольких одинаковых каналов с одновременно работающими АЦП.
В системе с параллельно работающими каналами можно считать, что сигнал на входе средства измерений действует неограниченно долго. При коммутации каналов сигнал объекта измерений x(t) действует, пока ключ коммутатора замкнут. Описание динамической погрешности этих двух типов систем имеет свои особенности.
Измерение при синусоидальном сигнале
Сначала рассмотрим случай, когда входной (измеряемый) сигнал изменяется по синусоидальному закону x(t) = A sin(ωt) (рис. 2), а измерительный канал не содержит коммутатора. Считая, что канал линеен, получим на его выходе сигнал y(t) = A|W(ω)| sin(ωt+φ(ω)), где |W(ω)| – амплитудно-частотная характеристика (АЧХ) измерительного канала,
.jpg)
– фазочастотная характеристика (ФЧХ), фактически сдвиг фазы выходного сигнала относительно входного. Таким образом, погрешность измерительного канала в данном случае состоит из двух компонентов (рис. 2): погрешности амплитуды

и погрешности фазы

Наиболее простые соотношения для оценки указанных погрешностей получаются для случая, когда динамику измерительного канала можно представить моделью первого порядка (фильтром первого порядка):

где ω0,7 – граничная частота по уровню 1/√2=0,707. Для неё АЧХ и ФЧХ имеют вид:
.jpg)
Поскольку погрешность средств измерений в системах автоматизации, как правило, не превышает 1%, в приведённых соотношениях можно считать ω/ω0,7 << 1, что позволяет разложить нелинейные функции в ряд Тейлора и ограничиться первыми двумя членами разложения. При этих условиях получим:

Например, если модуль ввода имеет граничную частоту ω0,7 = 5 Гц, то для того чтобы динамическая погрешность не превышала 0,05%, частота входного сигнала должна составлять не более √0,05%•2 = 0,032, или 3,2% от граничной частоты ω0,7, то есть не более 0,16 Гц.
Отметим, что оценки (5) относятся только к погрешности амплитуды и фазы синусоидального сигнала, но не к погрешности отдельных его отсчётов. Наибольшая погрешность измерения входного сигнала как функции времени будет при ωt = 0, π, 2π, … Её величину можно оценить следующим образом:

где T = 2π/ω0,7 – постоянная времени фильтра, τ = 2π/ω – период измеряемого сигнала. Относительная погрешность будет равна:

Таким образом, для получения динамической погрешности величиной 0,1% при измерении отсчётов синусоидального сигнала в моменты времени ωt = 0, π, 2π, … частота входного сигнала должна быть в 1000 раз ниже граничной частоты фильтра. Отметим, что погрешность амплитуды, измеренная в моменты времени ωt = π/2, 3π/2, …, уменьшается в зависимости от частоты по квадратичному закону (5), в то время как погрешность в моменты времени ωt = 0, π, 2π, … – только линейно (7).
Измерение при входном сигнале «единичный скачок»
Если входной сигнал изменяется скачком, то для измерительного канала, который описывается моделью первого порядка (4) и не содержит коммутатора, реакцию на скачок можно получить с помощью преобразования Лапласа. Для этого в выражении (4) можно вместо jω использовать комплексную частоту p [3] и умножить (4) на изображение единичного скачка 1/p (по Лапласу). Переходя от изображения к оригиналу с помощью обратного преобразования Лапласа, получим сигнал на выходе измерительного канала как функцию времени:
y(t) = y0(1 – e–t/τ), (8)
где τ = 1/ω0,7, y0 – значение y(t) при t = ∞.
Поскольку точное значение единичного скачка y(∞) = y0 = 1, погрешность измерений Δy(t) = y0 – y(t) с течением времени будет уменьшаться по экспоненциальному закону:

Например, для получения относительной динамической погрешности 1% измерение нужно делать не раньше чем через t = 4,6π после подачи измеряемого сигнала. Для получения погрешности 0,05% задержка перед измерением должна быть не менее 7,6τ.
Измерение сигнала произвольной формы
Когда измеряемый сигнал имеет произвольную форму x(t), выражение для y(t) в общем случае имеет вид свёртки входного сигнала и импульсной характеристики измерительного канала hδ(t) [4]:

где ξ – переменная интегрирования.
Импульсная характеристика hδ(t) является реакцией измерительного канала на входной сигнал в форме дельта-функции Дирака δ(t). Вместо импульсной характеристики можно использовать реакцию на единичный скачок h1(t), при этом выражение для y(t) запишется в виде интеграла Дюамеля [4]:

К сожалению, более простого выражения не существует, и интегралы (10) и (11) нужно брать для каждой конкретной формы входного сигнала x(t). Сделать это аналитически, как правило, невозможно. Наиболее удобным способом является численное интегрирование или моделирование, например, с помощью программ Matlab, MathCAD.
Однако для многоканальной системы сбора данных с одним АЦП и коммутацией входных каналов (рис. 1) получить приближённое выражение для динамической погрешности в общем случае, независимо от формы сигнала на входе системы, возможно. Для этого воспользуемся тем, что отсчёты входного сигнала в системах сбора данных обычно берутся так часто, что при разложении функции x(t) в ряд Тейлора на интервале между отсчётами можно ограничиться линейным членом разложения. Иначе говоря, при произвольной форме входного сигнала и достаточно высокой частоте дискретизации функцию x(t) можно аппроксимировать прямой линией на участке t∈[t0, t1] (рис. 3), где t0 – момент замыкания ключа входного коммутатора; t1 – момент появления сигнала на выходе модуля ввода:

Максимальную погрешность такой аппроксимации можно оценить по величине третьего члена ряда Тейлора:

где точка ξ выбирается на интервале t∈[t0, t1] таким образом, чтобы величина второй производной в ней была наибольшей. В частности, если входной сигнал описывается линейной зависимостью, то для него
.jpg)
для всех точек интервала t∈[t0, t1].
Итак, сигнал после коммутатора, перед антиалиасным фильтром, имеет форму трапеции на интервалe t∈[t0, t1] (рис. 3). Начальные условия для фильтра после каждого переключения входного коммутатора являются приближённо нулевыми, поскольку постоянная времени фильтра T=2π/ω0,7 много меньше интервала между отсчётами t1 – t0.
Рассмотрим сначала случай с фильтром первого порядка, когда передаточная функция W(s) описывается выражением (4). Импульсную характеристику фильтра можно получить с помощью обратного преобразования Лапласа от выражения (4), в котором переменная jω заменена на комплексную частоту p:

Подставляя (14) и (12) в (10), получим выражение для функции y(t) на интервале t∈[t0, t1]:
Вычитая из полученного выражения сигнал на входе x(t) (12), получим величину абсолютной погрешности Δy(t) в виде:

Таким образом, при достаточно большом t (точнее, при t → ∞) абсолютная динамическая погрешность не приближается к нулю, а остаётся постоянной, равной Δy(∞) = (x1–x0) T / (t1–t0). При малых t, на начальном участке переходного процесса, погрешность экспоненциально уменьшается с течением времени.
Пользуясь (16), можно записать выражение для приведённой погрешности:

где xmax – верхняя граница диапазона измерений;
.jpg)
Используя это обозначение t в выражении (12), получим:

Из этой формулы виден физический смысл параметра τ – это время, за которое входной сигнал проходит интервал от x(t) = 0 до x(t) = xmax при условии, что он сохранит линейность на этом интервале.
Отметим, что при t → ∞ выражение (17) совпадает с (7), а при τ → ∞ – с (9).
Графики зависимости модуля динамической погрешности от времени, построенные по выражению (17) при x0/xmax = 0,5, показаны на рис. 4. Например, если постоянная времени фильтра первого порядка T равна 1 с, то для того чтобы динамическая погрешность не превышала 0,1%, отношение T/τ должно быть не более 0,001 (рис. 4), откуда τ > 1000T, то есть скорость нарастания входного сигнала должна быть такой, чтобы интервал от x(t) = 0 до xmax был пройден за время не менее 1000T = 1000 с. Если уравнение (18) нормировать по xmax, чтобы перейти к относительным величинам x=x/xmax

то можно сказать, что скорость нарастания входного сигнала 1/τ должна быть не более 0,001 с–1, или 0,1%/с.
Аналогичное соотношение можно получить для фильтра второго порядка с передаточной функцией
.jpg)
Выражение для приведённой погрешности будет иметь вид:
При t → ∞ , как и в системе первого порядка, погрешность стремится к постоянной величине.
Можно показать, что для фильтра N-го порядка, описываемого полиномом вида
.jpg)
погрешность стремится к величине
.jpg)
Таким образом, для многоканальной системы сбора данных с одним АЦП и коммутацией входных каналов (рис. 1) динамическая погрешность измерений не зависит от формы измеряемого сигнала и её величину можно оценить по графику на рис. 4 или по формуле (17).
Sinc-фильтр в измерительных модулях ввода
В системах автоматизации обычно используют режекторные фильтры для ослабления помехи с частотой 50 Гц, проникающей из сети питания. Такой фильтр, как правило, входит в состав микросхемы АЦП, из чего следует требование к простоте его реализации. Наиболее популярным для этих целей оказался sinc-фильтр (sinc, sinc2, sinc3, sinc4) [5, 6].
Структура цифрового sinc-фильтра представлена на рис. 5. Он состоит из двух каскадов: первый каскад – до ключа R, второй – после. На вход фильтра поступают отсчёты сигнала x(k) с частотой дискретизации fд. Блок z–1 выполняет задержку на один такт отсчётов, поступающих на его вход. Блок z–M выполняет задержку на M = 1 или M = 2 (тактов). Ключ R пропускает только каждый R-й отсчёт, поэтому частота следования отсчётов после него и на выходе фильтра составляет fд /R, то есть такой фильтр выполняет также функцию прореживания (децимации) отсчётов.
Первый каскад фильтра выполняет суммирование входных отсчётов, второй каскад выполняет функцию вычитания из поступившей на его вход суммы предыдущей суммы отсчётов (суммы, полученной на предыдущем такте fд /R), то есть выбирает суммы из R слагаемых. Таким образом, фильтр в целом выполняет операцию нахождения среднего арифметического в окне шириной R отсчётов, точнее, как будет показано далее, в окне шириной RM.
Непосредственно по рис. 5 можно записать передаточную функцию одного звена с блоком задержки z–1:

Аналогично для одного звена с блоком z–M передаточная функция будет иметь вид:

Здесь в показателе степени стоит произведение RM, поскольку вследствие прореживания отсчётов ключом R задержка отсчётов относительно k выполняется на RM тактов.
Поскольку в фильтре использовано N блоков до ключа и N блоков после, выражение для передаточной функции всего фильтра можно записать в виде произведения HI(z) HC(z) в степени N:

Здесь в знаменателе использован нормирующий множитель RM, чтобы коэффициент передачи фильтра на нулевой частоте был равен единице;

Для перехода к сумме в (24) использована формула суммы членов геометрической прогрессии:
.jpg)
По правилам преобразования Фурье задержке оригинала на один такт 1/fд соответствует оператор сдвига z–1 = e–jω/fд. Подставляя это значение в (24), получим Фурье-изображение передаточной функции sinc-фильтра в виде:

Выполнив ряд преобразований (подробнее см. в [1]), получим выражение для передаточной функции sinc-фильтра в виде:
Для упрощения аналитических выкладок передаточную функцию sinc-фильтра упрощают путём разложения знаменателя в (26) в ряд Тейлора с отбрасыванием всех членов, кроме первого:
Это приближение выполняется достаточно точно, поскольку обычно частота дискретизации гораздо выше частот, на которых используется sinc-фильтр ( f<< fд). Вероятно, такая аппроксимация объясняет название «sinc-фильтр» (по определению sinc-функции sinc(x) = sin(x)/x), хотя на самом деле функция sin(nx) / nsix(x) называется функцией Дирихле [7], или периодической sinc-функцией.
Поскольку при x = π функция sin(x)/x = 0, то частота режекции фильтра находится из условия fRM /fд = 1. Поэтому при типовой частоте дискретизации в АЦП fд = 32 768 Гц для ослабления помехи c частотой f = 50 Гц (T = 20 мс) выбирают RM = 656.
Рассмотрим принцип действия фильтра во временной области. Для упрощения будем считать N = 1 (фильтр первого порядка), то есть с одним звеном до ключа и одним после (рис. 5). Звено с элементом задержки z–1 выполняет функцию интегрирования, то есть суммирования в дискретной области. Сигнал на его выходе равен k∑n=0x(n). Ключ R замыкается через R тактов и пропускает на свой выход сумму Rm∑n=0n(x), где m – номер прореженного отсчёта (после ключа R).
Звено фильтра с элементом задержки z–M при M = 1 выполняет вычитание из текущей суммы отсчётов предыдущей суммы, то есть пропускает на свой выход сумму отсчётов в окне шириной R. Таким образом, sinc-фильтр первого порядка выполняет усреднение (вычисляет среднее арифметическое) входных отсчётов во временном окне шириной R, то есть формирует сумму
.jpg)
Поэтому sinc-фильтр можно представить как окно, движущееся вдоль оси времени и усредняющее попадающие в него R отсчётов.
При ширине окна, равной периоду помехи синусоидальной формы (например, помехи с частотой сети 50 Гц), среднее значение за период равно нулю. Этим объясняется подавление (режекция) sinc-фильтром помехи с частотой 50 Гц. Практически коэффициент ослабления определяется частотой отсчётов, разрядностью АЦП, погрешностью и стабильностью частоты тактового генератора фильтра. Например, ослабление sinc-фильтром помехи с частотой 50 Гц в модулях RealLab! серии NL составляет –120 дБ.
При постоянной частоте отсчётов fд sinc-фильтр позволяет изменять частоту режекции с помощью коэффициента прореживания R. На рис. 6 представлена АЧХ sinc-фильтров первого, второго и третьего порядка. Зависимость динамической погрешности измерения амплитуды синусоидального сигнала ΔA/A от частоты для трёх sinc-фильтров с параметрами T = 0,02 с и RM = 656 показана на рис. 7.
На рис. 8 показана реакция sinc-фильтров на линейно нарастающий сигнал (рис. 3). Как видим, линейно нарастающий сигнал проходит через фильтр с задержкой; возникающая при этом погрешность при t > 60 мс остаётся постоянной во времени, равной для sinc-фильтра первого порядка 0,5 T/τ, для фильтра второго порядка – T/τ, для фильтра третьего порядка – 1,5 T/τ, где T = 1/(50 Гц) = 20 мс – ширина временного окна фильтра, настроенного на частоту режекции 50 Гц.
Например, для получения динамической погрешности, равной 0,05%, для sinc3-фильтра входной сигнал должен изменяться со скоростью не более чем 100% за 60 с, или 1,67% за 1 с. Здесь проценты берутся от верхней границы динамического диапазона xmax (см. (17)).
Алиасные частоты, антиалиасные фильтры
Первой неожиданностью, с которой обычно сталкиваются те, кто первый раз начал собирать данные в компьютер, является появление низкочастотной помехи, которой нет в реальном процессе и которой, казалось бы, не должно быть в собранных данных. Помеха может иметь форму периодического сигнала (сплошная кривая на рис. 9 а) или напоминать сигнал с амплитудной модуляцией (рис. 9 б, в). В реальности такой помехи нет, она появляется только после дискретизации сигнала, поэтому её называют ложной, или алиасной (от английского alias – вымышленный). Алиасные помехи увеличивают погрешность измерительных каналов.
Аналогичные эффекты проявляются и в других областях человеческой деятельности как биения колебаний, интерференция, стробоскопический эффект, муар и т.п.
Принцип образования помехи с алиасной частотой иллюстрирует рис. 9 а. Здесь пунктирной линией показан дискретизируемый периодический сигнал с периодом T, точки на линии показывают моменты выборки текущих значений. При дискретизации с высокой частотой, когда шаг дискретизации много меньше периода колебаний (таким образом дискретизирован первый период синусоидального сигнала на рис. 9 а), дискретизированный сигнал качественно не отличается от исходного, если пренебречь погрешностью дискретизации. Если же шаг дискретизации приближается к периоду исходного сигнала, то, как показано сплошной линией на рис. 9 а, после дискретизации получается сигнал, по форме похожий на исходный, но с гораздо большим периодом. Период стремится к бесконечности при τ > T.
Аналогичный эффект, состоящий в появлении новых компонент спектра в низкочастотной области, возникает и при дискретизации функций произвольной формы. Рассмотрим этот эффект подробнее.
Пусть имеется непрерывный сигнал x(t) (рис. 10), заданный на интервале времени [0, T]. Выберем отсчёты сигнала с шагом τ в точках kτ и полученную последовательность отсчётов назовём дискретным сигналом xд(k). Последовательность отсчётов можно записать в виде функции от непрерывной переменной t, если использовать понятие дискретной импульсной функции:

где δ(•) – дискретная импульсная (игольчатая) функция, определяемая как

В отличие от дельта-функции Дирака, она не стремится к бесконечности при t = 0. В выражении (28) функция x(t) вынесена за знак суммирования потому, что она не зависит от k.
Найдём спектр сигнала xд(t) (28). Для этого сначала разложим функцию
.jpg)
в ряд Фурье [3], воспользовавшись её периодичностью:

где ωд = 2π/τ, n – номер коэффициента ряда, τ – период функции.
Найдём коэффициенты cn:
Знак суммирования в выражении (31) отсутствует потому, что за пределами интервала интегрирования –τ/2 < t < τ/2 все члены суммы для k ≠ 0 равны нулю.
Для того чтобы найти интеграл (31), представим игольчатую функцию как предел, к которому стремится прямоугольный импульс шириной tи << τ при tи → 0:

Тогда из (31) получим:
Если ширина импульса стремится к нулю, то limx→0(sin(x) / x) = 1, следовательно,
Используя это выражение, ряд Фурье для f(t) = ∞∑k=–∞δ(t–kτ) можно записать в виде (см. (30)):

Подставляя полученное выражение в (28), получим:

Здесь функция x(t) внесена под знак суммирования, поскольку она не зависит от n.
Найдём теперь спектральную плотность Xд(jω) дискретного сигнала xд(t) с помощью преобразования Фурье:
где S(j(ω – ωдn)) – спектральная плотность исходного не-прерывного сигнала x(t), сдвинутая по оси частот на ωдn = = 2πn/τ.
Таким образом, спектр дискретного сигнала Xд(jω) представляет собой серию копий спектров непрерывного сигнала X(jω), сдвинутых друг относительно друга на частоту дискретизации ωд= 2π/τ = 2fд:

На рис. 11 а показан график непрерывного сигнала x(t) (на рисунке слева) и модуля его спектральной плотности |X(f)|, f = ω/2π (на рисунке справа). Поскольку функция |X(f)| симметрична относительно оси ординат, на рис. 11 показан только график в правой полуплоскости. Исходный непрерывный сигнал x(t) можно рассматривать как дискретный с нулевым периодом дискретизации (τ → 0, ωд → ∞). Поэтому модуль его спектральной плотности является непериодической функцией (рис. 11 а, справа).
После дискретизации функции x(t) с частотой fд на графике модуля спектральной плотности появляется бесконечное количество копий |X(f)| (рис. 11 б, в, справа), сдвинутых друг относительно друга на величину fд. Степень отличия спектра дискретного сигнала от спектра непрерывного характеризует величину погрешности дискретизации. С уменьшением частоты дискретизации, как следует из (38) и как видно на рис. 11, копии спектров сближаются, увеличивая погрешность дискретизации.
Предположим, что вся полезная информация, содержащаяся в непрерывном сигнале, заключена в области от 0 до частоты fc, которую поэтому можно считать границей спектра непрерывного сигнала (на рис. 11 эта область спектра заштрихована). Если для восстановления сигнала используется фильтр с граничной частотой 2fc (рис. 11 в), который убирает все составляющие спектра, лежащие выше 2fc, то наличие копий в спектре дискретного сигнала не искажает форму сигнала после его восстановления.
Если же ближайшая копия спектра приблизится к оригиналу настолько, что внесёт искажения в его форму (рис. 11 г), то восстановить исходный сигнал становится невозможно. Поэтому для исключения наложения спектров частота дискретизации fд должна быть, по крайней мере, в 2 раза выше граничной частоты спектра fc, то есть

как и требуется по теореме Котельникова.
Спектр произвольного непрерывного сигнала, показанный на рис. 11 а, в общем случае является неограниченным. Поэтому копии спектров, появляющиеся после дискретизации, всегда частично перекрываются. Это является причиной потери информации при восстановлении сигнала. И только для сигнала с ограниченным спектром эффект наложения отсутствует, что позволяет восстановить сигнал без потери информации.
Описанный алиасный эффект не может быть устранён с помощью цифровой фильтрации, если частота дискретизации равна удвоенной частоте верхней границы спектра полезного сигнала, так как при этом в спектре дискретизированного сигнала будет потеряна информация о помехах. Для решения этой проблемы можно использовать аналоговый (антиалиасный) фильтр с граничной частотой fc ≤ 0,5 fд на входе блока дискретизации или выбрать частоту дискретизации выше верхней граничной частоты спектра помех, чтобы в последующем выполнить цифровую фильтрацию.
В модулях аналогового ввода антиалиасный фильтр обычно настроен на максимальную частоту дискретизации, обеспечиваемую модулем, и не может быть перестроен. Поэтому если при измерении медленно протекающих процессов частота дискретизации программно выбрана низкой, а антиалиасный фильтр не перестроен, то помеха не ослабляется антиалиасным фильтром и в измеренном сигнале появляются алиасные помехи. ●
Литература
-
Денисенко В.В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. – М. : Горячая линия – Телеком, 2008. – 608 с.
-
ГОСТ 8.256-77. Государственная система обеспечения единства измерений. Нормирование и определение динамических характеристик аналоговых средств измерений. Основные положения.
-
Баскаков С.И. Радиотехнические цепи и сигналы. – М. : Высшая школа, 1983. – 536 с.
-
Попов В.П. Основы теории цепей. – М. : Высшая школа, 1985. – 496 с.
-
Laddomada M., Lo Presti L., Mondin M., Ricchiuto C. An efficient decimation sinc-filter design for software radio applications // 2001 IEEE Third Workshop on Signal Processing, Advances in Wireless Communications, March 2001. – Р. 337–339.
-
Hogenauer E. An economical class of digital filters for decimation and interpolation // IEEE Transactions on Signal Processing. – 1981. – Vol. 29. – No. 2. – P. 155–162.
-
Сергиенко А.Б. Цифровая обработка сигналов. – СПб. : Питер, 2002. – 608 с.
Для измерения и стабилизации переменных нагрузок используют схему, показанную на рис. 112 [84]. Выполняют статическую тарировку, определяют динамическую ошибку на частоте испыта- [c.197]
Для получения максимальной производительности при заданной точности скорость вращения привода круговой координаты желательно менять в зависимости от наклона профиля, иначе говоря, от величины рассогласования. Для этой цели использован блок оптимального управления. Блок производит оптимизацию скорости вращения детали с целью достижения максимальной производительности при заданной точности измерения. Характеристика этого блока (рис. 2) выбрана такой, чтобы при обходе пологих участков профиля, когда динамическая ошибка рассогласования не превышает значения + Xq, скорость вращения была максимальной, а при увеличении угла подъема профиля и превышении величиной динамической ошибки значения Xq скорость вращения привода падала по параболическому закону вплоть до полной остановки при углах подъема профиля 90°. Величина динамической ошибки не может превысить значения пред, которое предвари- [c.164]
В общем случае система управления, обозначенная на рис. 1 через СУ, является устройством, получающим информацию о действительных изменениях выходных координат и формирующим на ее основе управляющие воздействия, влияющие на движение машины н уменьшающие динамические ошибки. Машина, снабженная системой управления с обратными связями, будет в дальнейшем называться управляемой. [c.15]
Предположим, что при некоторых M t) и M it) определено решение этого уравнения, соответствующее исследуемому режиму движения (например, установившемуся или режиму разгона машины), примем это решение д — gAt ) за программное движение, а отклонения решения системы (3.7), соответствующего аналогичному режиму, от программного движения будем рассматривать как динамические ошибки. [c.44]
Из известной теоремы Котельникова [101] следует, что значения F(joi)l близки к нулю при(0>2л/г и стремятся к нулю с ростом (0. Из формулы (4.14) вытекает следующее представление для преобразования Фурье динамической ошибки [c.69]
Определим динамические ошибки, вызванные воздействием момента Мс t)- При установившемся программном движении Жд = Ждо = М — амо, Жс/fin = Жсо/fin = —L — р (,. [c.75]
При установившемся движении можно считать, что Мс (t) является периодическим процессом вида (4.9). Из (4.37) следует, что кан дой гармонике этого процесса, имеющей частоту Q, соответствует гармоническая компонента динамической ошибки, амплитуда которой определяется следующим образом [c.76]
Уравнение (4.76) показывает также, что во втором приближении в динамической ошибке появляется вторая гармоника. Решая систему уравнений, получаем это добавочное слагаемое в таком виде [c.86]
Установка динамического гасителя приводит к изменению собственных частот системы и к появлению в системе дополнительной собственной частоты К, величина которой тем ближе к парциальной частоте чем меньше масса гасителя. При частоте возмущения, равной Агг, гаситель увеличивает динамическую ошибку ч1 а( ). Из формулы (6.16) видно, что гаситель является неэффективным на тех частотах а, на которых модуль динамической податливости оказывается малой величиной. В частности, при и = кг, т. е. при совпадении частоты возмуш,ения с одной из собственных частот системы, гаситель неэффективен, если он установлен в узле соответствующей собственной формы. [c.112]
Здесь Ын и (Он — номинальные значения входного напряжения п угловой скорости.) Выражение (6.26) показывает, что в рассматриваемом случае введение тахометрической обратной связи эквивалентно увеличению крутизны характеристики двигателя. Для машины с жесткими звеньями эффективность такого управления может быть исследована анализом выражения (4.62). Связь между динамической ошибкой при наличии тахометрической обратной связи I и динамической ошибкой в разомкнутой системе может быть представлена в операторной форме следующим образом [c.116]
Анализ этого выражения показывает, что введение обратной связи по ошибке положения при идеальном двигателе эквивалентно в первом приближении для резонансных и дорезонансных режимов увеличению коэффициента диссипации для соответствующей формы колебаний. Очевидно, что управление оказывается эффективным (1 Г2(гЛ )1 < 1), если /> > 0 в противном случае динамическая ошибка в резонансе возрастает. (Случай, когда < О, но не проходит по [c.133]
Отметим, что > 0 поэтому при достаточно больших значениях и обеспечивается существенное уменьшение динамической ошибки на первой собственной частоте системы. [c.133]
Качество переходного процесса будем характеризовать функционалом, представляющим собой интеграл от квадрата динамической ошибки, взятый на бесконечном интервале времени. Мерой эффективности управления в этом случае можно считать [c.133]
Вследствие неизбежных расхождений между реальной машино и ее динамической моделью действительные законы движения b jP ходпых звеньев отличаются от идеальных. Расхождения между действительными и идеальными законами движения называются динамическими ошибками. Определение их составляет одну из основных задач динамического анализа машины. [c.119]
Подставляя (3.41) в левые части уравнений (3.40), полагая при этом, что динамические ошибки являются малыми величинами, и пренебрегая на этом основании членами второго порядка относительно ijjr, получаем [c.53]
Движение однодвигательной машины с упругим многомас-совьш передаточным механизмом и линейной функцией положения исполнительного звена. В этом параграфе будут рассмотрены некоторые задачи динамического анализа неуправляемых машин. При этом будут определены динамические ошибки, вызванные различными факторами, и дииамическне нагрузки, воз- [c.64]
Рассмотрим сначала машину, состоящую из двигателя и ме-хаиической части, схема которой показана на рис. 19. При отсутствии управления с обратными связями (это будет предполагаться во всех примерах, рассматриваемых в этом параграфе) для получения полной системы уравнений движения необходимо систему уравнений (3.7) или (3.9) донолнить характеристикой двигателя. Будем сначала считать двигатель идеальным, полагая, что его выходное звено (ротор) осуществляет заданное программное движение qn(t), связанное с управлением Uo(t) соотношением = = f uo). В этом случае динамическая ошибка tl)o(f) тождественно равна пулю, а первое из уравнений (3.9) может быть использовано после интегрирования остальных уравнений для оиределе-ния момента МцШ [c.65]
Если асои < ki, то в этой сумме обычно наиболее существенным оказывается первое слагаемое. Иными словами, при низкочастотных воздействиях наиболее существенной оказывается динамическая ошибка по первой форме. Если к,п < аМм < / m+i, то в большинстве случаев в сумме (4.12) достаточно сохранить первое, т-е и (m-bl)-e слагаемые, т. е. учесть три формы колебаний (если только hmn и йт+t, и не являются малыми величинами). Вообще же иерезонаисные компоненты динамических ошибок обычно малы но сравнению с резонансными. [c.68]
Аналогичным путем определяются динамические ошибки, возникающие при отработке программных движений в позиционирующих устройствах, осуществляющих перевод системы из одного ноложения относительного покоя в дpJToe. Отличие от рассмотренного случая заключается только в форме закона gAt), который до.т1жен обеспечивать сначала разгон, а затем замедление вращения ведущего звена механизма. [c.70]
Получим прибли7кениые выражения для максимальной величины хр — динамической ошибки па исполнительном звене при и времени затухания колебаний. Выражение для [c.70]
Если Af o(g) и Ждо(ио, 5)—линейные функции q, то эти уравнения совпадают с уравнениями второго приближения при этом i и Hi представляют собой соответственно динамическую ошибку и динамическую компоненту движущего момента во втором приближении. Сравнение gi(f) с % t) и с позволяет оценить сходимость процесса последовательных приближений и сделать вывод о степени точности первого приближеиия. [c.83]
Динамический анализ механизмов робота в неустановив-шемся режиме. Рассмотрим робот типа Версатран , конструктивная схема которого представлена на рис. 29, а уравнения движения записываются в форме (3.66) — (3.68). Очевидно, что динамическая ошибка я 12, представляющая собой отклонение вертикального иеремещенпя траверсы 2 от программного движения, может быть легко определена интегрированпем независимого уравнения (3.67). При нулевых начальных условиях имеем [c.89]
Влияние маховика на динамические ошибки, возникающие в многомассовой цепной крутильной системе, зависит от того, где располагается маховая масса и где находится источник возмущений. Эффективность существенно зависит также от частот вынуждающих сил. Пусть t), т =0,. .., п, — динамические ошибки, возникающие в системе при отсутствии маховика. Присоединение маховика с моментом инерции Jm к некоторой /с-й массе вызывает появление дополнительного момента — управления Жь = —где tfji — ошибка, оставшаяся после установки маховика. Вводя в рассмотрение операторы динамических податливостей (3.25), имеем [c.110]
Если учесть, что моменты могут в первом приближепии считаться пропорциональными деформациям 6г упругих звеньев, то можно сказать, что сигнал обратной связи (6.28) содержит информацию о динамических ошибках по положению и по скорости в различных точках механической системы. Ниже мы подробно рассмотрим преимущества многокоптурной системы управления покажем, что она в принципе позволяет существенно увеличить эффективность управления при сохранении условий устойчивости системы. [c.117]
В случае двигателя с идеальной характеристикой (8.2) для определенпя динамической ошибки можно воспользоваться формулой (4.7), которая по существу устанавливает связь между смещением ге-й массы относительно выходного звена двигателя и законом движения этого выходного звепа. Заменяя в этой формуле дп на ije, а ifn — на — до, получаем при воздействии моментов Lmit) [c.129]
Обращаясь к исследованию эффективности управления в переходных процессах, ограничимся случаем Lmit) = 0, m=i,. … .., п, т. е. будем рассматривать только динамические ошибки, вызываемые силами инерции. Предполагая, что продолжительность переходного процесса (например, разгона машины) существенно превышает наибольший из периодов свободных колебаний механической системы, ограничимся учетом в операторе ( ) только первого слагаемого (см. 4). Тогда [c.133]
При вычислении интегралов от квадратов динамических ошибок воспользуемся выражением (8.16), в котором положим Ьш О. В качестве эталонного программного воздействия выберем Uait) = =u o(t), где M = onst,a(i) — единичная функция Хевисайда. Иными словами, будем рассматривать динамические ошибки в процессе разгона, вызванного подачей в момент времени = О постоянного по велпчиие сигнала на вход двигателя. Для идеального двигателя такое программное управление носит условный характер, поскольку оно соответствует мгновенному скачку угловой скорости ротора от нуля до стационарного значения, а функционалы (8.25) отражают колебания, возникающие в системе после такого мгновенного разгона. Однако, поскольку нас интересуют не абсолютные значения Ф и Фо, а их отношенне, выбранный эталонный переходный процесс оказывается обычно вполне приемлемым. [c.134]
c.251
]
Автоматы и автоматические линии Часть 2 (1976) — [
c.147
,
c.148
,
c.149
]
Динамическая ошибка сау. Нахождение коэффициентов ошибок.
Помимо статистических ошибок точность работы систем радиоавтоматики характеризуется динамическими и переходными ошибками.
Динамическая ошибка – ошибка в установившемся режиме работы системы при действии на неё нестационарного сигнала.
Переходная ошибка – ошибка при работе системы в переходном процессе, который возникает при отработке начального рассогласования.
Динамическая точность работы систем радиоавтоматики определяется при медленно изменяющихся входных сигналах (воздействия, число производных от которых ограничено).
Cигнал относится к медленно изменяющемуся воздействию, так как число производных от этого сигнала неравных нулю, равно , а -я производная равна нулю. Гармонический сигнал не является медленно изменяющимся, так как число производных от него равно .
Переходные процессы в системах радиоавтоматики затухают значительно быстрее по сравнению с изменением медленно изменяющегося сигнала, поэтому и достигается установившейся динамический режим работы системы.
По определению передаточной функции рассогласования преобразование Лапласа для ошибки системы:
или в области действительного переменного
Число слагаемых в последнем выражении ограничено, так как сигнал является медленно изменяющимся воздействием. Для нахождения неизвестных коэффициентов , которые называются коэффициентами ошибки, известны три способа.
2) Вторым способом коэффициенты ошибок находятся путём деления числителя передаточной функции ошибки на её знаменатель.
3) Для реализации третьего способа представим передаточную функцию ошибки в виде:
Перемножив полином знаменателя на (6.1), получим:
Приравняв коэффициенты при одинаковых степенях слева и справа в выражении (6.3), определим формулы для последовательного вычисления коэффициентов ошибок:
2 Влияние на ошибку системы коэффициента усиления системы и введение форсирующего звена
В инженерных расчётах коэффициенты ошибок удобнее рассчитывать через коэффициенты передаточной функции разомкнутой системы:
где — порядок астатизма системы.
Первое слагаемое в выражении (6.2) называют ошибкой по положению, а коэффициент -коэффициентом ошибки по положению, второе слагаемое – ошибкой по скорости, а коэффициент — коэффициентом ошибки по скорости. Аналогично, третье слагаемое в (6.2) называют ошибкой по ускорению, а коэффициент — коэффициентом ошибки по ускорению.
В астатических системах первых коэффициентов ошибок равны нулю, где — порядок астатизма системы радиоавтоматики.
При анализе качества работы систем радиоавтоматики помимо вычисления ошибок при медленно изменяющихся сигналах приходится оценивать точность и при гармонических воздействиях. В этом случае нельзя применять метод коэффициентов ошибок, так как число производных от гармонического сигнала не ограничено. При этом для расчёта ошибок необходимо использовать частотные характеристики. По амплитудно-частотной характеристике ошибки вычисляется амплитуда колебаний ошибки, по фазочастотной характеристике – сдвиг колебаний ошибки относительно входного сигнала.
Пример 6.1. Найти динамическую ошибку при входном сигнале следящей системы, передаточная функция которой в разомкнутом состоянии
Коэффициент астатизма .Тогда ,
Подставим данные в выражение (2), получим:
Вывод. При увеличении коэффициента усиления системы и введении форсирующего звена ошибка уменьшается, увеличение же постоянных времени инерционных звеньев ухудшает динамическую ошибку системы.
3 Средняя квадратическая ошибка системы.
В большинстве случаев закон распределения ошибки системы можно считать гауссовским, поэтому для расчёта составляющих суммарной средней квадратической ошибки достаточно учесть математическое ожидание и корреляционную функцию ошибки или её спектральную плотность.
На вход системы подаётся воздействие вида:
— случайный сигнал; — случайная помеха.
— cуммарная ошибка системы, где — выходной сигнал системы.
Рис. 7.1. К определению суммарной ошибки
На приведённом рисунке круг означает сумматор, а сектор круга со знаком минус означает операцию вычитания.
Преобразование Лапласа для суммарной ошибки:
Вывод. Суммарная ошибка состоит из двух составляющих, одна из которых, определяющая точность воспроизведения сигнала, зависит от передаточной функции ошибки, вторая, обусловленная действием помехи, — от передаточной функции замкнутой системы.
Предположим, что сигнал и помеха являются стационарными случайными функциями. Тогда математическое ожидание помехи , а случайный сигнал представим в виде:
— математическое ожидание сигнала; — случайная составляющая сигнала.
Математическое ожидание суммарной ошибки рассчитывают по теореме о конечном значении функции:
Ошибки в замкнутых системах автоматического управления
На рис.6.1 приведена схема одноконтурной замкнутой системы. В разделе 5.1.4 было показано, что многоконтурные системы могут быть сведены к одноконтурным. Сигнал на выходе вычитающего устройства e(t) = x(t) — y0(t) называется сигналом ошибки.

Рис.6.1 Схема одноконтурной замкнутой системы.
По определению передаточная функция ошибки равна

Из рис.6.1 следует, что Е(р) = Х(р) — Y0(p) = Х(р) — Y(p)W0 , где
С учетом (6.1) получим

Это выражение описывает передаточную функцию ошибки в замкнутой системе рис.6.1 и рис. 5.3.6 через передаточные функции входящих в нее звеньев Wp и W0 . Если замкнутая система построена по схеме рис. 5.3 а, то в приведенных выражениях полагают W0 =1.
Статическая ошибка системы есть предел ес = lim e(t)
Так как его изображение по Лапласу Х(р) = С/р , то ес = lim e(t) = lim рЕ(р) .
Пример 1. Пусть Wp W0 = —— — каскадное соединение инерционного звена с
усилителем. Тогда с учетом (6.2) получим:

Пример 2. Пусть WDW0 =— — каскадное соединение интегратора и
инерционного звена. Тогда с учетом (6.2) получим:

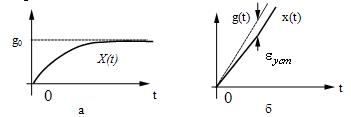
На рис 6.2 приведены графики e(t) в статической и астатической системах.
Система, в которой статическая ошибка не равна нулю, т.е. ес^0 , называется статической, а система, в которой ес=0, называется астатической. Из приведенных примеров следует, что система становится астатической, если в ее замкнутом кольце есть хотя бы одно звено интегрирования.

Рис.6.2 Графики зависимости ошибки e(t) в статической (а) и астатической (б) замкнутых системах автоматического управления
Динамические ошибки
Динамическими называются ошибки в замкнутой системе при входном воздействии вида

Этот сигнал относится к медленно меняющимся сигналам, так как (к+1) — ая производная этого сигнала по времени равна нулю. Отметим, что гармонический сигнал x(t) = Acoscot не является медленно меняющимся, так как ни одна из его производных не равна нулю.
Для определения динамической ошибки представим функцию We(p) рядом Тейлора  где С; — неизвестные коэффициенты ошибки. Тогда
где С; — неизвестные коэффициенты ошибки. Тогда

Этот ряд ограничен k-тым членом ряда, так как p’x(t)=0 при i>k, где р 1 =—г —
символы дифференцирования, поэтому при i>k слагаемые р’Х(р)=0.
Взяв от (6.4) обратное преобразование Лапласа, получим:

где р 1 =-^-г — символы дифференцирования. В ряде (6.5) первое слагаемое C0x(t) dt 1
называется ошибкой по положению, второе слагаемое Cipx(t) называется ошибкой по
скорости, а третье слагаемое
у[ Р %(t) называется ошибкой по ускорению. Коэффициенты С0, Ci и С2 называются соответственно коэффициентами ошибки по положению, скорости и ускорению. Слагаемые более высокого порядка и входящие в них коэффициенты ошибок С; специфического названия не имеют, они называются коэффициентами ошибки по i — ой производной сигнала.
Как найти динамическую ошибку
Точность систем управления является важнейшим показателем их качества. Чем выше точность, тем выше качество системы. Однако предъявление повышенных требований к точности вызывает неоправданное удорожание системы, усложняет ее конструкцию. Недостаточная точность может привести к несоответствию характеристик системы условиям функционирования и необходимости ее повторной разработки. Поэтому на этапе проектирования системы должно быть проведено тщательное обоснование требуемых показателей точности.
В этом разделе рассматриваются методы определения ошибок, возникающих при работе систем управления с детерминированными входными воздействиями. Вначале анализируются ошибки систем в переходном режиме. Затем особое внимание уделено простым способам расчета ошибок систем в установившемся режиме. Будет показано, что все системы управления можно разделить по величине установившихся ошибок на системы без памяти, так называемые статические системы, и системы, обладающие памятью, – астатические системы управления.
Типовые входные воздействия
Для оценки качества работы систем управления рассматривают их поведение при некоторых типовых воздействиях. Обычно такими воздействиями служат следующие три основные вида функций:
а) ступенчатое воздействие: g(t) = , g(p) = ;
б) линейное воздействие: g(t) = t , t > 0 ; ;

в) квадратичное воздействие: /2 , t > 0 ; g(p) = .
В некоторых случаях рассматривают обобщенное полиномиальное воздействие:
Ступенчатое воздействие является одним из простейших, но именно с его помощью определяется ряд важных свойств систем управления, связанных с видом переходного процесса. Линейное и квадратичное воздействия часто бывают связаны с задачами слежения за координатами движущегося объекта. Тогда линейное воздействие соответствует движению объекта с постоянной скоростью; квадратичное — движению объекта с постоянным ускорением.
Переходные процессы при типовых воздействиях можно построить следующим образом. Пусть задана передаточная функция замкнутой системы управления W(p). Тогда
где g(p) – изображение соответствующего воздействия.
Например, если , то и для g(t) = g0 получим .
С помощью вычетов или по таблицам находим обратное преобразование Лапласа и получаем вид переходного процесса x(t) для заданного входного воздействия:
где Res x(p) – вычет функции x(p) в точке a.
Обычно реакция системы на ступенчатое воздействие имеет вид, показанный на рис. 21,а или рис. 21,б.
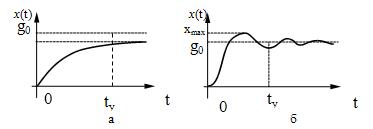
Переходный процесс, как правило, характеризуют двумя параметрами – длительностью переходного процесса (временем установления) и величиной перерегулирования.
Под временем установления tу понимают временной интервал, по истечении которого отклонение |x(t) — xуст | выходного процесса от установившегося значения xуст не превышает определенную величину, например, 0,1gо. Время установления является важным параметром САУ, позволяющим оценить ее быстродействие. Величину tу можно оценить приближенно по амплитудно-частотной характеристике системы. При заданной частоте среза . Для оценки качества системы используется также величина перерегулирования, определяемая соотношением .
В зависимости от характера собственных колебаний системы переходный процесс в ней может быть колебательным, как это показано на рис. 21, б, или плавным гладким, называемым апериодическим (рис. 21,а). Если корни характеристического уравнения системы действительны, то переходный процесс в ней апериодический. В случае комплексных корней характеристического уравнения собственные колебания устойчивой системы управления являются затухающими гармоническими и переходный процесс в системе имеет колебательный характер.
При малом запасе устойчивости САУ ее собственные колебания затухают медленно, и перерегулирование в переходном режиме получается значительным. Как следствие, величина перерегулирования может служить мерой запаса устойчивости системы. Для многих систем запас устойчивости считается достаточным, если величина перерегулирования .
Установившийся режим
При проектировании систем управления часто требуется оценить ошибку слежения в установившемся режиме . В зависимости от вида воздействия и свойств системы эта ошибка может быть нулевой, постоянной или бесконечно большой величиной.
Очень важно, что величина установившейся ошибки может быть легко найдена с помощью теоремы о предельном значении оригинала: .
При использовании этой теоремы нужно выразить величину ошибки e (p) через g(p). Для этого рассмотрим структурную схему замкнутой системы управления (рис. 22).
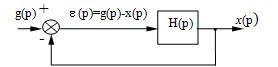
Очевидно, e (p) = g(p) — x(p) = g(p) — H(p)e(p). Отсюда или e (p) = He(p)g(p) , где He(p) = называется передаточной функцией системы управления от входного воздействия g(p) к ошибке слежения e(p). Таким образом, величину установившейся ошибки можно найти с помощью следующего соотношения:
где He(p) = 1/(1+H(p)); g(p) — изображение типового входного воздействия.
Пример 1. Рассмотрим систему управления, в составе которой нет интеграторов, например,
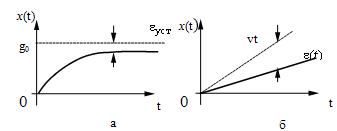
Найдем величину установившейся ошибки при ступенчатом входном воздействии g(t) = g0, t ³ 0. В этом случае
Предположим теперь, что входное воздействие изменяется линейно t или .
Тогда . Соответствующие входные воздействия и переходные процессы можно представить графиками на рис. 23,а и б.
Пример 2. Рассмотрим теперь систему, содержащую один интегратор. Типичным примером может быть система сервопривода (рис. 6) с .
Для ступенчатого воздействия g(t) = g0 или g(p) = получим
При линейном входном воздействии
Такие процессы можно проиллюстрировать соответствующими кривыми на рис.24, а и б.
Пример 3. Рассмотрим систему с двумя интеграторами. Пусть, например, . При ступенчатом воздействии .
Наконец, если входное воздействие квадратичное g(t) = at2/2 (g(p) = a/p3), то
Таким образом, в системе с двумя интеграторами может осуществляться слежение за квадратичным входным воздействием при конечной величине установившейся ошибки. Например, можно следить за координатами объекта, движущегося с постоянным ускорением.
Статические и астатические системы управления
Анализ рассмотренных примеров показывает, что системы управления, содержащие интегрирующие звенья, выгодно отличаются от систем без интеграторов. По этому признаку все системы делятся на статические системы, не содержащие интегрирующих звеньев, и астатические системы, которые содержат интеграторы. Системы с одним интегратором называются системами с астатизмом первого порядка. Системы с двумя интеграторами – системами с астатизмом второго порядка и т.д.
Для статических систем даже при неизменяющемся воздействии g(t) = g0 установившаяся ошибка имеет конечную величину g(t) = g0 . В системах с астатизмом первого порядка при ступенчатом воздействии установившаяся ошибка равна нулю, но при линейно изменяющемся воздействии . Наконец, в системах с астатизмом второго порядка ненулевая установившаяся ошибка появляется только при квадратичных входных воздействиях g(t) = at2 /2 и составляет величину eуст = a/k.
Какие же физические причины лежат в основе таких свойств астатических систем управления?
Рассмотрим систему управления с астатизмом второго порядка (рис. 25)
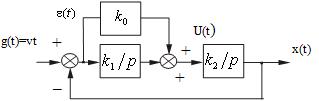
Пусть входной сигнал системы управления изменяется линейно: t. Как было установлено, в такой системе установившаяся ошибка равна нулю, т.е. e (t) =0. Каким же образом система работает при нулевом сигнале ошибки? Если x(t) = t , то на входе второго интегратора должен быть сигнал . Действительно, при нулевом рассогласовании e (t) =0 в системе с интеграторами возможно существование ненулевого выходного сигнала первого интегратора . Первый интегратор после окончания переходного процесса «запоминает» скорость изменения входного воздействия и в дальнейшем работа системы управления осуществляется по «памяти». Таким образом, физическим объяснением такого значительного различия статических и астатических систем является наличие памяти у астатических систем управления.
Итак, существуют простые возможности определения важнейшего показателя систем управления – величины их динамических ошибок. Детальный анализ переходных процессов в системах управления обычно выполняют с помощью моделирования на ПЭВМ. Вместе с тем величины установившихся ошибок легко находятся аналитически. При этом астатические системы управления, т.е. системы с интеграторами, имеют существенно лучшие показатели качества по сравнению со статическими системами.