Предварительная проверка безопасности при снятии с охраны (Pre-arm Check)
APM с прошивкой 3.0.1 (и выше) включает в себя предварительную проверку безопасности при снятии с охраны,
которая приводит к тому, что одна из проблем была выявленна:
- Проверяет, что была выполнена калибровка Радио.
- Проверяет, что была выполнена калибровка акселерометра.
- Проверяет, что компас здоровый и правильно передает данные.
- Проверяет, что смещение компасе не слишком большое (т.е. корень SQRT (х ^ 2 + у ^ 2 + Z ^ 2) <500).
- Проверяет, что калибровка на живую компаса или на базе журналирования была выполнена или что «COMPASS_LEARN» включен.
- Проверяет адекватное напряжение магнитного поля: (APM1/APM2 около 330, PX4/Pixhawk около 530)
- Проверяет, что барометр здоровый и правильно обменивается данными.
- Если круговая ограда (Fence) включена или снимаете с охраны в режиме Loiter проверка безопасности проверяет, что:
- у вас есть фиксация спутников по GPS
- параметр GPS HDOP < 2.0 (настраивается параметр GPS_HDOP_GOOD)
- Путевая скорость меньше 50 см / сек
- Проверяет, что полетный контроллер питается между 4,5 и 5,5 вольт для АРМ 1 или АРМ 2
- Проверяет, что 7 и 8 канал не настроен на управление на одну и ту же функцию.
- Если включен Radio FailSafe проверяет минимальное значение стика газа канала не ниже FS_THR_VALUE
- Проверяет параметр ANGLE_MAX (т.е. максимальный угол наклонав большинстве режимов) является больше 10 и меньше 80 градусов
- Проверяет уровень PWM по четырем первым каналам , если они меньше 1300 и не больше 1700
Если все остальное нормально, за исключением того,
когда вы пытаетесь снять с охраны (Arming) стиком газа вниз и вправо (режим Mode2 на аппаратуре),
он будет на самом деле не сниматься с охраны и двигатели не будут вращаться он, вероятно,
не прошел проверку Pre-Arm безопасности.
Вы должны заметить, что красный светодиод будет мигать двумя быстрыми вспышками по кругу.
Видео с подробным описанием Pre-Arm safety check
Отключение Pre-Arm Safety Check
Если вы уверены, что проверка на сбок не настоящая проблема вы можете отключить её:
- Подключение APM к Mission Planer
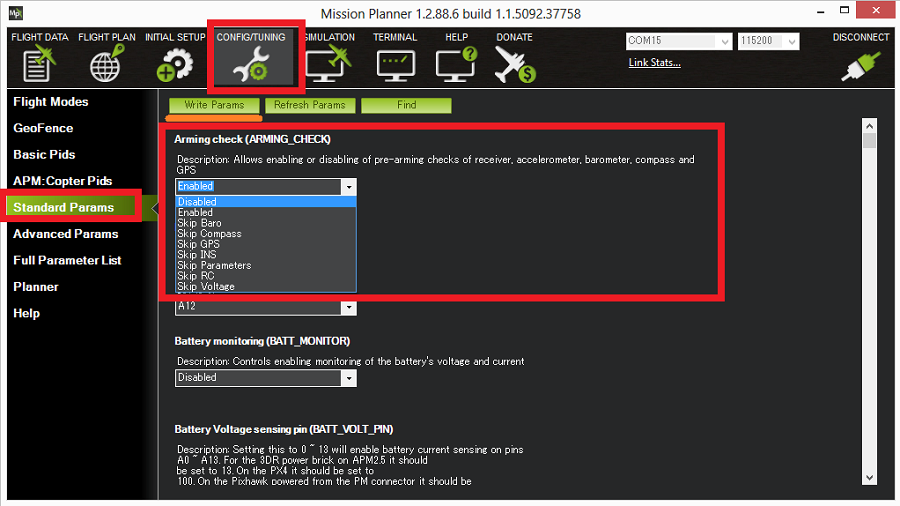
- Зайдите в раздел Config/Tuning -> Standart Params
- установитe Pre-Arm Check на значение «Disabled» или, если вы используете AC3.1 (или выше),
вы можете пропустить этот пункт, который вызывает сбой. - Нажмите кнопку «Write Params»
В идеале вы должны определить
причину сбоя Pre-Arm,
и если она может быть решена,
верните этот параметр к исходному положению — «Enabled»
Чтобы понять, что вызвало сбой Pre-Arm Check:
- Подключите свой полетный контроллер к компьютеру через порт USB.
- Запустите Mission Planner и соединитесь с ArduPilot нажав кнопку «Connect» в правом верхнем углу.
- Включите аппаратуру радиопередатчика и удерживайте стик газа вниз и вправо (процедура постановки на охрану — Disarm).
- Первый причиной проверки отказа Pre-Arm безопасности будет отображаться красным цветом в окне HUD Mission Planner.
- Каждая проблема и адрес будет сообщаться при попытке снять с охраны, как указано выше.
- Когда все проблемы были исправлены, вы увидите проверку «снятия с охраны» (Pre-Arm Check) в окне HUD.
- После этого можно отключить от компьютера и имеють хорошую гарантию того,
что снятие с охраны (arming) будет происходить в обычном режиме.
Устранение проблем предварительной проверки снятия с охраны (Pre-arm fix):
- Если не прошла проверка Радио rалибровки — сделайте повторно калибровку радио .
- Если не прошла проверка калибровки акселерометра — сделайте повторно калибровку акселерометра .
- Если происходит сбой компаса — сделайте заново живую калибровку компаса .
- Если проверка барометра (высотомера) не работает, то ваш контроллер скорее всего имеет
аппаратную проблему с барометром. - Если проверка позиция GPS не удалась
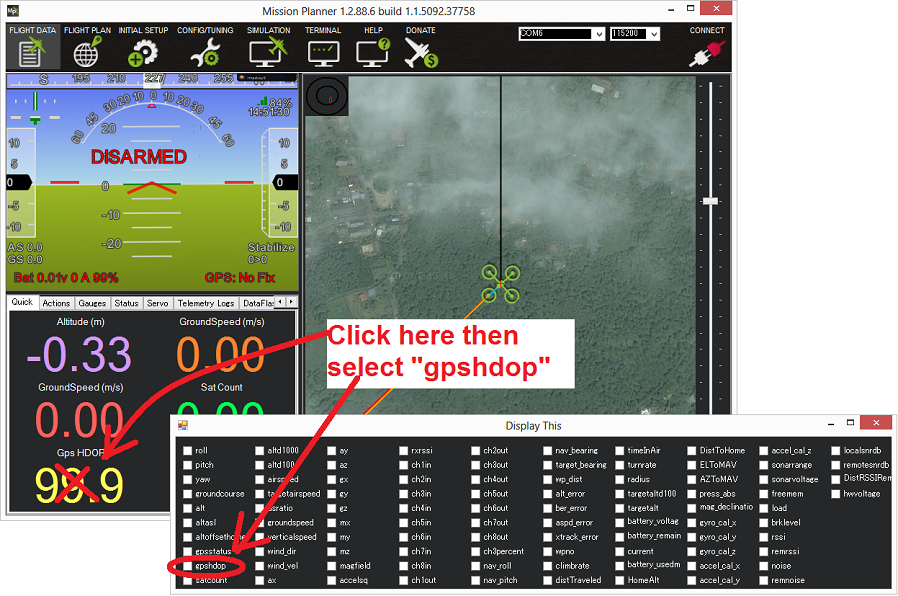
- ждать HDOP вашего GPS, чтобы он опустился ниже 2.0,
прежде чем пытаться снимать с охраны. Вы можете сделать
это более легко — наблюдая в области быстрого экрана Mission Planner. - Отключите Geofence в Config/Тюнинг -> Geofence
- Снимите с охраны (arming) в полетный режим Стабилизации (Stabilize mode) и позже перейдите в режим Loiter
(этот режим (loiter) не рекомендуется на момент старта, потому что хорошая фиксация
по спутникам GPS требуется для Loiter и
HDOP является хорошим показателем того, что GPS позиция хороша) - увеличить параметр GPS_HDOP_GOOD от 200 до 250
(это также не рекомендуется по тем же причинам, что и выше) - Если проверка напряжения питания полетного контроллера не успешная:
- проверить UBEC , который используется для подачи напряжения на АРМ
напряжение должно быть между 4,5 и 5,5 вольт (чем ближе к 5V, тем лучше) - проверить, если какие-либо периферийные устройства,
которые питаются от АРМ и имеют слишком высокий потребляемый ток. - Если на канал 7 и 8 было установлено тоже самое (одинаковая функция) измените один из них с помощью Mission Planner Config/Тюнинг -> PIDS
А давайте обсудим Arducopter — APM
думаю и загрузчик 2560 нужно менять
Помогите пожалуйста выдает вот эти ошибки prearm: high gps hdop
(Вот эта вообще раз за разом вылазиет-prearm: bad velocity) Квадрокоптер не армится. спутники ловит 11-17
Пропадает телеметрия или порт? Это разные вещи. Телеметрия — набор данных определенного формата.
Получатель данных телеметрии (тот же OSD) могут не понимать формат, хотя данные есть. Если там стоит родная для Cheerson CX-20 OSD, то может у нее нестандартный формат данных, и в прошивке именно он изменен, а не порт.
При таком кол-ве спутников вообще-то hdop не должен быть высоким. Т.е. когда вы видите 11 спутников hdop уже нормальный скорее всего.
velocity — это скорость, которая вычисляется в т.ч. по GPS.
Оба сообщения связаны с проблемой GPS, причем, может одной и той же.
Вы перед армом ждете загорания зеленого или нет? Если нет, то получение этих ошибок — ожидаемое поведение.
орая вычисляется в т.ч. по GPS.
Оба сообщения связаны с проблемой GPS, причем, может одной и той же.
Вы перед армом ждете загорания зеленого или нет? Если нет, то получение этих ошибок — ожидаемое поведение.
Да жду. сейчас уже полчаса стоит на балконе и до сех пор моргает эта надпись. спутники ловит все… что за проблема с гпс может быть?
Например, что стоит на балконе. Для хорошего hdop нужна большая часть открытого неба, и даже не кол-во спутников.
По-идее, 3.2.1 использует все 3 UART (GPS + Telemetry 1 + Telemetry 2). Но реально не смотрел.
Пропадает телеметрия или порт? Это разные вещи. Телеметрия — набор данных определенного формата.
Получатель данных телеметрии (тот же OSD) могут не понимать формат, хотя данные есть. Если там стоит родная для Cheerson CX-20 OSD, то может у нее нестандартный формат данных, и в прошивке именно он изменен, а не порт.
Там всё максимально универсально с классическим APM, просто своя трассировка плат контроллера и добавлены 2 функции — “особый” порт под телеметрию и возможность входа в режим калибровки через правый стик (она мне лично нахрен не нужна).
Телеметрия — копия 3DRовской. OSD — MinimOSD.
Поэтому версия с форматом наверное отпадает.
Пропадает порт, пины порта (TX и RX) переходят или в Z-состояние, или в 0 (точно не помню), но уровень на них становится линейным, цифровые данные не идут.
После этого остается возможность подпаяться напрямую к лапам атмеги и восстановить телеметрию.
Я вот почему решил этим заняться.
2 месяца назад подключил телеметрию (фейк 3dr 433мгц), она работала исправно.
Недели 1.5 назад подключил OSD (MinimOSD), причем сначала подключил неправильно — к OSD шел пин RX а не TX.
Потом я перепаял этот пин, но возникла странная ситуация:
- OSD начинал видеть данные только после коннекта телеметрии (именно после установки соединения МП и АПМ в МП)
- Через 4-5 минут работы OSD теряло данные, писало NoMavData, и что характерно — отваливалась и телеметрия тоже.
Глючное OSD я отключил, но проблема с модемами телеметрии осталась — в рандомные моменты времени они отказываются соединяться и всё. Т.е. модемы соединены и настроены, а МП к АПМ не может подключиться. Перезагрузка не помогает.
Вчера например я отлетал 3 аккума и телеметрия ни разу не смогла соединиться.
Поэтому я и решил копать в сторону смены прошивки.
Я выходил на улицу. ловил спутники. спутники все поймал. стала на планшете выходить надпись раз за разом prearm: bad velocity Потом я всетаки завел его и поднял в режиме альтхольт. потом переключил в режим лоутер и квадрик стал лететь в бок. .
Вообще-то у 2560 4 железных UART.
По-поводу GPS логи надо смотреть. Найдите на улице место, откуда видно много неба.
Вообще-то у 2560 4 железных UART.
Вы правы. Я забыл про нулевой порт.
На каком из этих портов можно поймать данные для OSD / телеметрии?
При условии стандартной прошивки (не чирсоновской)
Я попробую прозвонить свой порт с этими пинами, вдруг он у меня железный, а не программный.
По-поводу GPS логи надо смотреть. Найдите на улице место, откуда видно много неба.
Хорошо. я завтра пойду в поле. попробую там запустить… если так же будет… я напишу вам
“Bad velocity” — Accelerometer calibration was successfull, at home in room temperature was everything alright-Акселерометр калибровка была успешной, дома в комнатной температуре было все в порядке.Совсем запутался, я по памяти думал на баро,а тут совсем другое,извиняюсь за заблуждение.Короче , Александр, перекалиброваться попробовать на кубике , я так делаю когда совсем ничего не помогает , то есть выдержать все градусы максимально возможно,проверить питание (должно быть 4.9-5.2 В ) и смотреть как летает.И насчет хдопа,в том же фул листе добавил значение хдопа с 230 до 280- то есть если хдоп 2.8 и выше начинает орать , опыт полетов показал,что вполне зватает 2.8…
И самое главное,не любит вибраций арм, у меня в лоитере скакал по высоте,убрал вибрации-повис четко.
думаю и загрузчик 2560 нужно менять
Вот мне всегда было интересно, причем тут загрузчик, он же только передает управление выше и все? Как он связан с ком портами? Это как поменять LILO на grub на ПК. Нет?
Поэтому я и решил копать в сторону смены прошивки.
Было то же самое, когда собирал первый квадр, телеметрия ну никак не хотела работать, или включалась как только установлена связь по радиомодему. Купил вторую OSD — не помогло, купил APM 3.1 — помогло. Думал у меня APM 2.6 какой-то бракованный, но потом само все заработало, вроде я ничего не делал, разве что прошивку обновлял. Так и не понял что это было.
“Bad velocity” — Accelerometer calibration was successfull, at home in room temperature was everything alright-Акселерометр калибровка была успешной, дома
Извиняюсь, я не много не понял о какой температуре идет реч? не могли бы вы подрбнее описать, как это на кубике? спасибо.
мужики, нужен совет.
квадрокоптер, моторы 2212, 920кв. Через пластину
расстояние между осями 50 см.
Винты 10х4,5
мозг ДевоМ (тот самый ардукоптер). Приклеены через вибропоглощающую прокладку.
Как ни настраиваю пиды, что автотюном, что вручную, есть две проблемы.
- В полете в стабилайз или альтхолд “полный вперед” идет падение высоты.
- при висении в лоитер при порывах ветра или при кручении вокруг оси, начинает теряться, болтаться, не держать позицию.
Уже задолбался. Где копать?
Пиды сейчас такие


Bad velocity — температура не при чем.
Bad velocity может означать плохие данные GPS или очень плохую калибровку акселерометра (на счет последнего сомневаюсь, что это реально достичь). Но при сообщении о плохом hdop это скорее всего GPS. Добейтесь работы GPS, Bad velocity скорее всего уйдет.
По-поводу boot loader: вообще-то основное его назначение в микроконтроллерах AVR — перепрошивка основной программы. Теоретически в нем может быть и другой код, но я считаю это маловероятным — когда делается код под разные платформы (как ArduCopter), то обычно стараются унифицировать как можно больше. А перенос части аппликационного кода в bootloader — это противоположная задача.
К Bad velocity, наверное, может приводить движение или сильная вибрация коптера во время инициализации. Сразу после включения питания его нельзя шевелить несколько секунд.
Bad velocity может означать плохие данные GPS или очень плохую калибровку акселерометра (на счет последнего сомневаюсь, что это реально достичь)
Попробую завтра все перенастроить и выйду в поле опробовать. посмотрю что будет
если что напишу вам в личку
Было то же самое, когда собирал первый квадр, телеметрия ну никак не хотела работать, или включалась как только установлена связь по радиомодему. Купил вторую OSD — не помогло, купил APM 3.1 — помогло. Думал у меня APM 2.6 какой-то бракованный, но потом само все заработало, вроде я ничего не делал, разве что прошивку обновлял. Так и не понял что это было.
Главный трабл в том, что OSD убил мне телеметрию.
Раньше она работала прекрасно. Софт v3.1.2.
Видимо придется забить болт и обновиться до обычной 3.2.1.
К лапам атмеги как-нибудь припаяюсь.
Не мог OSD убить телеметрию. OSD — читатель, и если он правильно припаян, на выходы UART не влияет. Чтобы UART как-то так сгорел, что плохой сигнал выдает — не верится что-то. Либо сгорел, либо — нет. Осциллографом или цифроанализатором бы посмотреть, что там.
В режиме Лойтер с подвесом бывает время от времени странно себя ведет. Теряет точку, начинает плыть, снижаться. Такое происходит только когда цепляю подвес с камерой. Что это может быть?
Сначала летал вот с таким модулем GPS
С ним при включенном подвесе вообще отказывался армиться, говорил “Бэд Компас Хэлсф”. Запустить камеру и подвес удавалось только когда подсоединял их к уже включенному коптеру. Но в полете возникала вышеописанная проблема (потеря точки, снижение).
Сейчас летаю вот с этим модулем GPS. Экранировал его снизу, и провод тоже. С подвесом теперь армится, но в полете GPS все равно в Лоитере иногда пропадает. Хотя, по мишн-планеру вроде бы все спутники на месте.
Сейчас пытаюсь скачать логи, сам в них мало что понимаю, кому не трудно будет посмотреть?
Вид моего аппарата:

Сами ответили. У Вас подвес давит на ЖПС.
В режиме Лойтер с подвесом бывает время от времени странно себя ведет. Теряет точку, начинает плыть, снижаться. Такое происходит только когда цепляю подвес с камерой. Что это может быть?
С выключенным подвесом и камерой, нормально себя ведёт? Где-то читал, что включение некоторых камер приводит к потере спутников. Не пробовали с включенным подвесом, но выключенной камерой, чтоб определить, камера или подвес так влияют?
Выложите фото рамы: крепление луча , мотора , АРМ. Может что видно будет.
Всё стандартное с Али. Из двух комплектов лучей выбрал самые жесткие.
-

toljapa
Студент- Регистрация:
- 25 июл 2016
- Сообщения:
- 208
- Город:
- миасс
- Имя:
- анатолий
здравствуйте ,у меня вопрос по GeoFence,настроил ,не дает запустить винты .пишет ошибки по GPS ,один раз удалось запустить ,не надолго.Я уже вычитал ,что лечится выключением GeoFence.,но хотелось пользоваться этой функцией .есть какое -то решение?
-
raefa
Главнокомандующий
Команда форумаПри арминге задается точка дом и относительно нее по радиусу и высоте высчитывается доступная зона полета.
Давайте посмотрим на ошибки. -
toljapa
Студент- Регистрация:
- 25 июл 2016
- Сообщения:
- 208
- Город:
- миасс
- Имя:
- анатолий
хотел обезопасить себя «забором» ,я зашел в GeoFence ,включил «Enable»,в настройках поставил «Altitude и Circle» и «RTL»,все остальное оставил без изменений ,Max Alt вроде 100,а радиус 300.
«Pre-Arm Check «пишет и»gps high «и чего то там … посмотрю когда приду домой .винты не запускались ,пока не отключил «Enable»,правда ради интереса спустился из дома вниз для проверки .винты запустились на расстоянии от дома ,потом попытался запустить на площадке ,без результата .— Сообщения объединены, 12 сен 2017 —
сейчас вернулся ,блин ,глюк при взлете: коптер кренится все больше набок ,не успеешь оторваться от земли ,винтам каюк -падает назад.проще всего взлетать и садиться на автомате ,аккуратно это делает .
— Сообщения объединены, 12 сен 2017 —
…без моего участия ,копец обидно .отлетал пол-часа все отлично ,а потом на стабе при отрыве от земли ,винты вдрызь об асфальт.
Последнее редактирование: 12 сен 2017
-
toljapa
Студент- Регистрация:
- 25 июл 2016
- Сообщения:
- 208
- Город:
- миасс
- Имя:
- анатолий
так вот пишет :»Pre-Arm:BAD Velocity» при арминге и иногда вылазит:Pre-Arm:»high gps Hdop»
— Сообщения объединены, 13 сен 2017 —
менять что-то в параметрах или помехи мешают ? мой gps 160 -140 мм от верхн деталей коптера.
-
High gps пишет когда поймал или мало спутников или неустойчивый прием,соответственно малая точность измерения
— Сообщения объединены, 21 сен 2017 —
Если на стабе валиться на бок надо ещё раз и аккуратно провести калибровку акселей и сделать save trim
-
toljapa
Студент- Регистрация:
- 25 июл 2016
- Сообщения:
- 208
- Город:
- миасс
- Имя:
- анатолий
возможно ,когда я долго держал арминг (иногда долго не запускались движки )я ввел в режим автотрим , а полет после был аварийным и как то повлияло на регулировку акселей .стоит взлететь и все нормально .я уже взлетаю и сажаю только с рук(может перевернуться и при посадке)
— Сообщения объединены, 28 сен 2017 —
кстати ,я отлетал с» невидимым забором и потолком» ,это было вдали от города ,потом только заметил ,когда домой пришел .,что забыл отключить геофенс.,еще понять не мог почему коптер высоко поднять не могу .
Последнее редактирование: 28 сен 2017
-
Расколбас при fs, сегодня улетел за пределы радиуса папы и включился fs, при этом аппарат сдорово качнуло,примерно градусов на 30, когда подлетел поближе переключился на альт хольд, раскачки не было,опять загнал подальше ,опять сработал fs, и опять качнуло, правда было где-то два наклона по осям но ощутимые, так должно быть или что то не так?
-
Качает один раз? Это он просто так резко разворачивается
-
Ну в общем да один раз качает
— Сообщения объединены, 25 окт 2017 —
Пересмотрел видео, кивок вверх носом с резким поворотом градусов на 40
-
raefa
Главнокомандующий
Команда форумаПравильно понимаю, что настроен и сработал режим GeoFence?
-
Нет,режим выключен,сработало по потере связи с пультом


This both is an Error is PreArm error of the Mission planner. This error showing means you are using an APM or pixhawk flight controller.
Errors:
-
PreArm: Need 3D Fix
-
PreArm: High GPS HDOP
Why this error is shown in the mission planner?
Both errors are related to the GPS. When GPS has not 3D fixed at that time you will face this error and when the GPS HDOP value is more than 2 at that time you will receive this error. if you are looking good quality GPS module then the drone will take less time to connect with GPS and your drone will quickly be ready to arm.
Note: this both errors you will face if you are using Loiter mode or flight mode which required GPS.
Many times people face this issue even if they are not using Loiter mode but they are facing the same error. It happens due to the GEO fence. You need to Disable Geofence.
What is Geo-fence:
Geo fence helps you to control your drone to fly in a specific area if the drone will go outside of provided area then Geo-Fence will be on and the Drone mode will automatically change to the RTL and then after it will automatically land at the takeoff location.
You will get more details about Geo-fence here. https://ardupilot.org/copter/docs/common-ac2_simple_geofence.html
How to disable Geo-fence?
Go to Config/tuning → GeoFence → ( Uncheck Enabled).
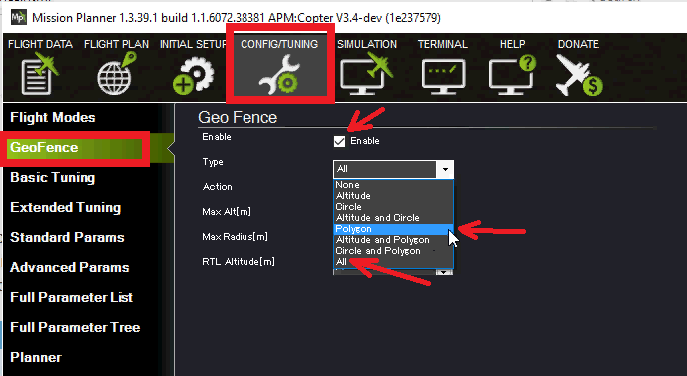
You can also Edit Geofence data like type, Action, Alt, Radius.
If you have any questions related to the drone please leave a comment below.
While working on a new APM 2.6 build I came across this issue whereby the APM will not arm because of a reported GPS HDOP of greater than 2. Occasionally, re-powering the multi-rotor will see the HDOP below 2 and so arming is possible. However, that has not been consistent.
Tonight I have been researching this High GPS HDOP issue that we have been seeing. And I think that I have some answers now …
Trigger
The PreArm error message only triggers when attempting to arm the APM when a GPS-dependent function is enabled. That would be Loiter, Pos Hold, Auto (mission) or Geofence (I had Geofence enabled).
In my case, disabling Geofence and setting flight mode to Stabilize sees the FC arm as normal and consistently with a reported HDOP of greater than 2 (but less than 3).
Mitigation
In Mission Planner, Config/Tuning, Full Parameter List, search for GPS_HDOP_GOOD and change it to 300 (from its default 200). This not such a bad thing to do. See below for why.
Seeing as I want to use Geofence, which when enabled will require GPS before arming, I have set my FC’;s parameter to 300 (3).
Root Cause
A longstanding bug exists in the Arducopter code that has been there for a couple of years and not fixed. It is where the Arducopter code is reading the PDOP value from the GPS and misrepresenting it as HDOP. Of course, there can be very many good reasons why PDOP might be higher.
There is a fairly good explanation of it in a blog post here: https://www.cloud-surfer.net/2014/09/12/high-hdop-values-when-flying-iris/
If this is true then we will have to wait for the bug to be fixed, but the mitigation of setting the value to 300 (3) is benign.
- 6 people like this.
—
Danny
«Its better than bad, its good»
Current FCs: Pixhawk, APM 2.6, Naza M V2, Naze32, Flip32+ CC3D, KK2.1.5
Aircraft: miniMax Hex, DJI 550 (clone) TBS Disco, 450 Firefly, 250 Pro, ZMR250, Hubsan X4, Bixler 2