GPS (Global Positioning System) – это спутниковая система навигации, которая используется для определения местоположения объектов на земле. Ошибка GPS может возникнуть в любом месте и в любое время, что может привести к неправильной работе приложений, использующих GPS-координаты, таких как картографические приложения, навигаторы, спортивные трекеры и другие.
Ошибка GPS может быть вызвана различными причинами, включая плохую погоду, отсутствие соединения с спутниками, неправильные настройки на устройстве или приложении, недостаток оборудования, проблемы с геомагнитным полем и другие факторы.
Если вы столкнулись с ошибкой GPS, есть несколько способов ее исправить. Некоторые из них включают перезагрузку устройства, перезапуск приложения, проверку настроек GPS и устранение факторов, мешающих соединению с спутниками. Если проблема не устранилась, возможно, потребуется обратиться к профессионалам для более глубокой диагностики и ремонта оборудования.
Содержание
- Что такое GPS?
- Как работает GPS?
- Как определить ошибку GPS?
- Что может вызвать ошибку GPS?
- Как исправить ошибку GPS?
- Вопрос-ответ
- Что делать, если на моем устройстве показывает неправильную информацию о местоположении?
- Почему мое устройство не может определить мое местоположение в здании?
- Что я могу сделать, если GPS сигнал на моем устройстве слабый или отсутствует?
Что такое GPS?
GPS (от англ. Global Positioning System) – это глобальная система позиционирования, которая позволяет определять местоположение объекта на Земле с высокой точностью. Она была разработана для использования в военных целях США, но в настоящее время доступна для общественности.
GPS работает на основе сигналов, которые передают спутники вокруг Земли. Эти сигналы принимаются специальными приемниками, которые вычисляют расстояние между спутником и приемником. По этим данным происходит определение координат местонахождения объекта и его скорости движения.
GPS используется во многих сферах жизни, начиная от навигации и картографии, заканчивая автомобильной и авиационной промышленностями. Также GPS широко применяется в научных исследованиях, в том числе в геодезии, океанографии и метеорологии.
- Преимущества использования GPS:
- высокая точность определения местоположения объекта;
- широкий спектр применения в различных отраслях;
- надежность и доступность.
Тем не менее, при использовании GPS могут возникать различные проблемы, такие как ошибки в определении координат, сбои в работе, проблемы с получением сигнала. Ошибки в работе GPS могут быть вызваны как внешними, так и внутренними факторами, например, погодными условиями, ухудшением качества сигнала и т.д. Однако, большинство этих проблем можно решить, следуя основным правилам использования GPS и настройкам приемника.
Как работает GPS?
GPS – система глобального позиционирования. Она состоит из 24 спутников, которые кружат вокруг Земли на высоте около 20 000 км, а также из приемников, которые устанавливаются на Земле.
GPS-приемник собирает сигналы от нескольких спутников и на основе этих данных вычисляет свое местоположение.
Каждый спутник GPS постоянно испускает сигналы, которые содержат информацию о текущем времени и координатах спутника. Этот сигнал достигает приемника на Земле со скоростью света. Измеряя время, за которое сигнал путешествует от спутника до приемника, и зная расстояние до спутника, GPS-приемник может определить свое местоположение с точностью до нескольких метров.
Для более точного определения координат GPS-приемник должен получать сигналы от нескольких спутников. Это объясняется тем, что сигналы могут подвергаться отражению от зданий и других препятствий, что может привести к искажению результатов. Если же приемник получает сигналы от нескольких спутников, он может использовать триангуляцию для более точного определения местоположения.
Таким образом, GPS – это очень удобный инструмент для навигации и ориентации в мире. Он широко используется не только для автомобильных навигаторов, но и в армии, авиации и даже в обычной повседневной жизни.
Как определить ошибку GPS?
GPS, или глобальная система позиционирования, предоставляет пользователям точные данные о местоположении. Однако, иногда при использовании GPS возникают ошибки, и это может создавать проблемы. Вот несколько способов, как определить ошибку GPS.
1. Проверьте, включен ли GPS
Перед тем, как искать ошибку, убедитесь, что GPS на вашем устройстве включен. Если GPS отключен, данные о местоположении могут отсутствовать или быть неточными.
2. Проверьте качество сигнала
Если качество сигнала не является достаточно сильным, GPS не сможет точно определить ваше местоположение. Проверьте, есть ли устройство прямая видимость на небо, может быть, вы находитесь в закрытом помещении или находитесь в зоне плохой связи, тогда следует переместиться в другое место.
3. Проверьте настройки приложения, использующего GPS
Если вы используете приложение, которое использует GPS, то проверьте настройки приложения на наличие необходимых разрешений. Если разрешения не были предоставлены, то данные о местоположении могут быть недоступны для приложения.
4. Проверьте оборудование
Если все еще есть проблемы с GPS, то проблема может быть в самом устройстве. Убедитесь в том, что устройство, которое вы используете для позиционирования, поддерживает GPS.
Вывод: Если GPS действительно не работает, то необходимо установить версию приложения, проверить оборудование, и если нужно, воспользуйтесь другим устройством для позиционирования. Однако, если вы все-таки не можете получить точные данные, то разумнее всего обратиться за помощью к специалистам.
Что может вызвать ошибку GPS?
1. Проблемы с приемником GPS
Приемник GPS может быть поврежден или неисправен, что приведет к тому, что он не сможет получить сигнал от спутников и установить местоположение. В этом случае необходимо заменить приемник или обратиться к специалистам для его ремонта.
2. Расположение и окружение
В зданиях, автомобилях, в ущельях, находясь в густой растительности может быть проблема с приемом сигнала, и это может привести к ошибкам в показаниях GPS.
3. Неправильная настройка
Если приемник GPS неправильно настроен, то может возникнуть ошибка, которая приведет к неверным данным. Необходимо убедиться, что приемник настроен правильно.
4. Проблемы с сигналом спутника
Если спутник не работает должным образом или находится в позиции, которая не позволяет ему быть «видимым» для приемника GPS, то наблюдается ошибка в показаниях местоположения. Но это редко бывает, так как для GPS предусмотрена система дублирования спутников на разных орбитах.
5. Проблемы со смежными технологиями
Некоторые технологии могут влиять на работу GPS, например, некоторые радиопередачи или сигналы Wi-Fi. В этом случае необходимо перенести смартфон или приемник на безопасное расстояние от источников сигнала.
Как исправить ошибку GPS?
Если ваше устройство не успевает определить местоположение или выдает ошибку GPS, не отчаивайтесь. Ниже приведены несколько советов, которые могут помочь вам исправить ошибку GPS:
- Проверьте настройки GPS. Убедитесь, что включен режим GPS и приложения, использующие GPS, имеют разрешение на его использование.
- Перезагрузите устройство. Иногда перезагрузка устройства может помочь исправить ошибку GPS.
- Проверьте место использования. В некоторых местах, таких, как здания или места с плохой связью, GPS может работать нестабильно.
- Обновите приложения и операционную систему. Убедитесь, что приложения, использующие GPS, и операционная система устройства обновлены до последней версии.
- Сбросьте настройки GPS. В некоторых случаях сброс настроек GPS может помочь исправить ошибку. Для этого нужно перейти в настройки устройства, выбрать раздел «Система» или «Общие настройки», найти раздел «Сброс» и выбрать опцию «Сбросить настройки GPS».
Несколько мер, которые могут помочь вам исправить ошибку GPS. Если ни одна из перечисленных выше мер не помогла, возможно, причиной проблемы является неисправность аппаратного обеспечения устройства. В таком случае рекомендуется обратиться за помощью в сервисный центр.
Вопрос-ответ
Что делать, если на моем устройстве показывает неправильную информацию о местоположении?
Сначала убедитесь, что у вас включен режим GPS и устройство имеет доступ к сигналу GPS. Если это не помогает, попробуйте перезагрузить устройство или провести калибровку датчика GPS. Если эти действия не помогли, попробуйте воспользоваться приложением для проверки состояния датчика GPS, в котором можно диагностировать проблему и попробовать исправить ее.
Почему мое устройство не может определить мое местоположение в здании?
GPS сигнал имеет ограничения в зданиях, так как он не проникает сквозь стены и крыши. Поэтому в помещении лучше использовать Wi-Fi или сотовые данные для определения местоположения, так как они работают на более коротких дистанциях и не зависят от проницаемости стен. Также существуют специальные приложения, которые позволяют определять местоположение в помещении с помощью Bluetooth-датчиков, но они требуют дополнительного оборудования.
Что я могу сделать, если GPS сигнал на моем устройстве слабый или отсутствует?
Сначала проверьте, что устройство имеет доступ к надежному сигналу GPS, для этого выйдите на открытое пространство или переместитесь ближе к окну. Также убедитесь, что устройство не блокирует сигнал GPS, например, не находится в кармане или сумке. Если это не работает, попробуйте перезагрузить устройство или провести калибровку датчика GPS. Если эти действия не приводят к желаемому результату, попробуйте воспользоваться приложением для усиления сигнала GPS или внешним GPS-приемником, который можно подключить к устройству по Bluetooth или через порт USB.
GPS pseudorange and carrier-phase measurements are both affected by several types of random errors and biases (systematic errors). These errors may be classified as those originating at the satellites, those originating at the receiver, and those that are due to signal propagation (atmospheric refraction) [1]. Figure 3.1 shows the various errors and biases.
The errors originating at the satellites include ephemeris, or orbital, errors, satellite clock errors, and the effect of selective availability. The latter was intentionally implemented by the U.S. DoD to degrade the autonomous GPS accuracy for security reasons. It was, however, terminated at midnight (eastern daylight time) on May 1, 2000 [2]. The errors originating at the receiver include receiver clock errors, multipath error, receiver noise, and antenna phase center variations. The signal propagation errors include the delays of the GPS signal as it passes through the ionospheric and tropospheric layers of the atmosphere. In fact, it is only in a vacuum (free space) that the GPS signal travels, or propagates, at the speed of light.
In addition to the effect of these errors, the accuracy of the computed GPS position is also affected by the geometric locations of the GPS satellites as seen by the receiver. The more spread out the satellites are in the sky, the better the obtained accuracy (Figure 3.1).

Figure 3.1 GPS errors and biases.
For example, combining L1 and L2 observables removes, to a high degree of accuracy, the effect of the ionosphere. Mathematical modeling of these errors and biases is also possible. In this topic, the main GPS error sources are introduced and the ways of treating them are discussed.
GPS ephemeris errors
Satellite positions as a function of time, which are included in the broadcast satellite navigation message, are predicted from previous GPS observations at the ground control stations. Typically, overlapping 4-hour GPS data spans are used by the operational control system to predict fresh satellite orbital elements for each 1-hour period. As might be expected, modeling the forces acting on the GPS satellites will not in general be perfect, which causes some errors in the estimated satellite positions, known as ephemeris errors. Nominally, an ephemeris error is usually in the order of 2m to 5m, and can reach up to 50m under selective availability [3]. According to [2], the range error due to the combined effect of the ephemeris and the satellite clock errors is of the order of 2.3m [1s-level; s is the standard deviation.
An ephemeris error for a particular satellite is identical to all GPS users worldwide [4]. However, as different users see the same satellite at different view angles, the effect of the ephemeris error on the range measurement, and consequently on the computed position, is different. This means that combining (differencing) the measurements of two receivers simultaneously tracking a particular satellite cannot totally remove the ephemeris error. Users of short separations, however, will have an almost identical range error due to the ephemeris error, which can essentially be removed through differencing the observations. For relative positioning,the following rule of thumb gives a rough estimate of the effect of the ephemeris error on the baseline solution: the baseline error / the baseline length = the satellite position error / the range satellite [5]. This means that if the satellite position error is 5m and the baseline length is 10 km, then the expected baseline line error due to ephemeris error is approximately 2.5 mm.
Some applications, such as studies of the crustal dynamics of the earth, require more precise ephemeris data than the broadcast ephemeris. To support these applications, several institutions [e.g., the International GPS Service for Geodynamics (IGS), the U.S. National Geodetic Survey (NGS), and Geomatics Canada] have developed postmission precise orbital service. Precise ephemeris data is based on GPS data collected at a global GPS network coordinated by the IGS. At the present time, precise ephemeris data is available to users with some delay, which varies from 12 hours for the IGS ultra rapid orbit to about 12 days for the most precise IGS precise orbit. The corresponding accuracies for the two precise orbits are in the order of a few decimeters to 1 decimeter, respectively. Users can download the precise ephemeris data free of charge from the IGS center, at ftp://igscb.jpl.nasa.gov/igscb/product/.
Selective availability
GPS was originally designed so that real-time autonomous positioning and navigation with the civilian C/A code receivers would be less precise than military P-code receivers. Surprisingly, the obtained accuracy was almost the same from both receivers. To ensure national security, the U.S. DoD implemented the so-called selective availability (SA) on Block II GPS satellites to deny accurate real-time autonomous positioning to unauthorized users. SA was officially activated on March 25, 1990 [3].
SA introduces two types of errors [6]. The first one, called delta error, results from dithering the satellite clock, and is common to all users worldwide. The second one, called epsilon error, is an additional slowly varying orbital error. With SA turned on, nominal horizontal and vertical errors can be up to 100m and 156m, respectively, at the 95% probability level. Figure 3.2 shows how the horizontal position of a stationary GPS receiver varies over time, mainly as a result of the effect of SA. Like the range error due to ephemeris error, the range error due to epsilon error is almost identical between users of short separations. Therefore, using differential GPS would overcome the effect of the epsilon error. In fact, DGPS provides better accuracy than the standalone P-code receiver due to the elimination or the reduction of the common errors, including SA [4].
Following extensive studies, the U.S. government discontinued SA on May 1,2000, resulting in a much-improved autonomous GPS accuracy [2]. With the SA turned off, the nominal autonomous GPS horizontal and vertical accuracies would be in the order of 22m and 33m (95% of the time), respectively.

Figure 3.2 Position variation of a stationary GPS receiver due to SA.
Figure 3.3 shows the GPS errors after SA was turned off. The elimination of SA will open the door for faster growth of GPS markets (e.g., vehicle navigation and enhanced-911). Although the removal of SA would have little impact on the DGPS accuracy, it would reduce the cost of installing and operating a DGPS system. This is mainly because of the reduction in the required transmission rate.
Satellite and receiver clock errors
Each GPS Block II and Block IIA satellite contains four atomic clocks, two cesium and two rubidium [7]. The newer generation Block IIR satellites carry rubidium clocks only. One of the onboard clocks, primarily a cesium for Block II and IIA, is selected to provide the frequency and the timing requirements for generating the GPS signals. The others are backups [7].
The GPS satellite clocks, although highly accurate, are not perfect. Their stability is about 1 to 2 parts in 1013 over a period of one day. This means that the satellite clock error is about 8.64 to 17.28 ns per day. The corresponding range error is 2.59m to 5.18m, which can be easily calculated by multiplying the clock error by the speed of light (i.e., 299,729,458 m/s). Cesium clocks tend to behave better over a longer period of time compared with rubidium clocks. In fact, the stability of the cesium clocks over a period of 10 days or more improves to several parts in 1014 [7].

Figure 3.3 Position variation of a stationary GPS receiver after terminating SA.
The performance of the satellite clocks is monitored by the ground control system. The amount of drift is calculated and transmitted as a part of the navigation message in the form of three coefficients of a second-degree polynomial [3, 8].
Satellite clock errors cause additional errors to the GPS measurements. These errors are common to all users observing the same satellite and can be removed through differencing between the receivers. Applying the satellite clock correction in the navigation message can also correct the satellite clock errors. This, however, leaves an error of the order of several nanoseconds, which translates to a range error of a few meters (one nanosecond error is equivalent to a range error of about 30 cm) [4].
GPS receivers, in contrast, use inexpensive crystal clocks, which are much less accurate than the satellite clocks [1]. As such, the receiver clock error is much larger than that ofthe GPS satellite clock. It can, however, be removed through differencing between the satellites or it can be treated as an additional unknown parameter in the estimation process. Precise external clocks (usually cesium or rubidium) are used in some applications instead of the internal receiver clock. Although the external atomic clocks have superior performance compared with the internal receiver clocks, they cost between a few thousand dollars for the rubidium clocks to about $20,000 for the cesium clocks.
Multipath error
Multipath is a major error source for both the carrier-phase and pseu-dorange measurements. Multipath error occurs when the GPS signal arrives at the receiver antenna through different paths [5]. These paths can be the direct line of sight signal and reflected signals from objects surrounding the receiver antenna (Figure 3.4).
Multipath distorts the original signal through interference with the reflected signals at the GPS antenna. It affects both the carrier-phase and pseudorange measurements; however, its size is much larger in the pseu-dorange measurements. The size of the carrier-phase multipath can reach a maximum value of a quarter of a cycle (about 4.8 cm for the L1 carrier phase). The pseudorange multipath can theoretically reach several tens of meters for the C/A-code measurements. However, with new advances in receiver technology, actual pseudorange multipath is reduced dramatically.

Figure 3.4 Multipath effect.
Examples of such technologies are the Strobe correlator (Ashtech, Inc.) and the MEDLL (NovAtel, Inc.). With these multipath-mitigation techniques, the pseudorange multipath error is reduced to several meters, even in a highly reflective environment [9].
Under the same environment, the presence of multipath errors can be verified using a day-to-day correlation of the estimated residuals [3]. This is because the satellite-reflector-antenna geometry repeats every sidereal day. However, multipath errors in the undifferenced pseudorange measurements can be identified if dual-frequency observations are available. A good general multipath model is still not available, mainly because of the variant satellite-reflector-antenna geometry. There are, however, several options to reduce the effect of multipath. The straightforward option is to select an observation site with no reflecting objects in the vicinity of the receiver antenna. Another option to reduce the effect of multipath is to use a chock ring antenna (a chock ring device is a ground plane that has several concentric metal hoops, which attenuate the reflected signals). As the GPS signal is right-handed circularly polarized while the reflected signal is left-handed, reducing the effect of multipath may also be achieved by using an antenna with a matching polarization to the GPS signal (i.e., right-handed). The disadvantage of this option, however, is that the polarization of the multipath signal becomes right-handed again if it is reflected twice [9].
Antenna-phase-center variation
The point at which the GPS signal is received is called the antenna phase center [3]. Generally, the antenna phase center does not coincide with the physical (geometrical) center of the antenna. It varies depending on the elevation and the azimuth of the GPS satellite as well as the intensity of the observed signal. As a result, additional range error can be expected [3].
The size of the error caused by the antenna-phase-center variation depends on the antenna type, and is typically in the order of a few centimeters. It is, however, difficult to model the antenna-phase-center variation and, therefore, care has to be taken when selecting the antenna type [1]. For short baselines with the same types of antennas at each end, the phase-center error can be canceled if the antennas are oriented in the same direction [11]. Mixing different types of antennas or using different orientations will not cancel the error. Due to its rather small size, this error is neglected in most of the practical GPS applications.
It should be pointed out that phase-center errors could be different on L1 and L2 carrier-phase observations. This can affect the accuracy of the ionosphere free linear combination, particularly when observing short baselines. As mentioned before, for short baselines, the errors are highly correlated over distance and cancel sufficiently through differencing. Therefore, using a single frequency might be more appropriate for short baselines in the static mode.

The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of error should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.
Overview[edit]
| Source | Effect (m) |
|---|---|
| Signal arrival C/A | ±3 |
| Signal arrival P(Y) | ±0.3 |
| Ionospheric effects | ±5 |
| Ephemeris errors | ±2.5 |
| Satellite clock errors | ±2 |
| Multipath distortion | ±1 |
| Tropospheric effects | ±0.5 |
 C/A C/A
|
±6.7 |
| P(Y)
|
±6.0 |


User equivalent range errors (UERE) are shown in the table. There is also a numerical error with an estimated value,  , of about 1 meter (3 ft 3 in). The standard deviations,
, of about 1 meter (3 ft 3 in). The standard deviations,  , for the coarse/acquisition (C/A) and precise codes are also shown in the table. These standard deviations are computed by taking the square root of the sum of the squares of the individual components (i.e., RSS for root sum squares). To get the standard deviation of receiver position estimate, these range errors must be multiplied by the appropriate dilution of precision terms and then RSS’ed with the numerical error. Electronics errors are one of several accuracy-degrading effects outlined in the table above. When taken together, autonomous civilian GPS horizontal position fixes are typically accurate to about 15 meters (50 ft). These effects also reduce the more precise P(Y) code’s accuracy. However, the advancement of technology means that in the present, civilian GPS fixes under a clear view of the sky are on average accurate to about 5 meters (16 ft) horizontally.
, for the coarse/acquisition (C/A) and precise codes are also shown in the table. These standard deviations are computed by taking the square root of the sum of the squares of the individual components (i.e., RSS for root sum squares). To get the standard deviation of receiver position estimate, these range errors must be multiplied by the appropriate dilution of precision terms and then RSS’ed with the numerical error. Electronics errors are one of several accuracy-degrading effects outlined in the table above. When taken together, autonomous civilian GPS horizontal position fixes are typically accurate to about 15 meters (50 ft). These effects also reduce the more precise P(Y) code’s accuracy. However, the advancement of technology means that in the present, civilian GPS fixes under a clear view of the sky are on average accurate to about 5 meters (16 ft) horizontally.
The term user equivalent range error (UERE) refers to the error of a component in the distance from receiver to a satellite. These UERE errors are given as ± errors thereby implying that they are unbiased or zero mean errors. These UERE errors are therefore used in computing standard deviations. The standard deviation of the error in receiver position,
 , is computed by multiplying PDOP (Position Dilution Of Precision) by
, is computed by multiplying PDOP (Position Dilution Of Precision) by
, the standard deviation of the user equivalent range errors.
is computed by taking the square root of the sum of the squares of the individual component standard deviations.
PDOP is computed as a function of receiver and satellite positions. A detailed description of how to calculate PDOP is given in the section Geometric dilution of precision computation (GDOP).
for the C/A code is given by:

The standard deviation of the error in estimated receiver position , again for the C/A code is given by:

The error diagram on the left shows the inter relationship of indicated receiver position, true receiver position, and the intersection of the four sphere surfaces.
Signal arrival time measurement[edit]
The position calculated by a GPS receiver requires the current time, the position of the satellite and the measured delay of the received signal. The position accuracy is primarily dependent on the satellite position and signal delay.
To measure the delay, the receiver compares the bit sequence received from the satellite with an internally generated version. By comparing the rising and trailing edges of the bit transitions, modern electronics can measure signal offset to within about one percent of a bit pulse width,  , or approximately 10 nanoseconds for the C/A code. Since GPS signals propagate at the speed of light, this represents an error of about 3 meters.
, or approximately 10 nanoseconds for the C/A code. Since GPS signals propagate at the speed of light, this represents an error of about 3 meters.
This component of position accuracy can be improved by a factor of 10 using the higher-chiprate P(Y) signal. Assuming the same one percent of bit pulse width accuracy, the high-frequency P(Y) signal results in an accuracy of  or about 30 centimeters.
or about 30 centimeters.
Atmospheric effects[edit]
Inconsistencies of atmospheric conditions affect the speed of the GPS signals as they pass through the Earth’s atmosphere, especially the ionosphere. Correcting these errors is a significant challenge to improving GPS position accuracy. These effects are smallest when the satellite is directly overhead and become greater for satellites nearer the horizon since the path through the atmosphere is longer (see airmass). Once the receiver’s approximate location is known, a mathematical model can be used to estimate and compensate for these errors.
Ionospheric delay of a microwave signal depends on its frequency. It arises from ionized atmosphere (see Total electron content). This phenomenon is known as dispersion and can be calculated from measurements of delays for two or more frequency bands, allowing delays at other frequencies to be estimated.[1] Some military and expensive survey-grade civilian receivers calculate atmospheric dispersion from the different delays in the L1 and L2 frequencies, and apply a more precise correction. This can be done in civilian receivers without decrypting the P(Y) signal carried on L2, by tracking the carrier wave instead of the modulated code. To facilitate this on lower cost receivers, a new civilian code signal on L2, called L2C, was added to the Block IIR-M satellites, which was first launched in 2005. It allows a direct comparison of the L1 and L2 signals using the coded signal instead of the carrier wave.
The effects of the ionosphere generally change slowly, and can be averaged over time. Those for any particular geographical area can be easily calculated by comparing the GPS-measured position to a known surveyed location. This correction is also valid for other receivers in the same general location. Several systems send this information over radio or other links to allow L1-only receivers to make ionospheric corrections. The ionospheric data are transmitted via satellite in Satellite Based Augmentation Systems (SBAS) such as Wide Area Augmentation System (WAAS) (available in North America and Hawaii), EGNOS (Europe and Asia), Multi-functional Satellite Augmentation System (MSAS) (Japan), and GPS Aided Geo Augmented Navigation (GAGAN) (India) which transmits it on the GPS frequency using a special pseudo-random noise sequence (PRN), so only one receiver and antenna are required.
Humidity also causes a variable delay, resulting in errors similar to ionospheric delay, but occurring in the troposphere. This effect is more localized than ionospheric effects, changes more quickly and is not frequency dependent. These traits make precise measurement and compensation of humidity errors more difficult than ionospheric effects.[2]
The Atmospheric pressure can also change the signals reception delay, due to the dry gases present at the troposphere (78% N2, 21% O2, 0.9% Ar…). Its effect varies with local temperature and atmospheric pressure in quite a predictable manner using the laws of the ideal gases.[3]
Multipath effects[edit]
GPS signals can also be affected by multipath issues, where the radio signals reflect off surrounding terrain; buildings, canyon walls, hard ground, etc. These delayed signals cause measurement errors that are different for each type of GPS signal due to its dependency on the wavelength.[4]
A variety of techniques, most notably narrow correlator spacing, have been developed to mitigate multipath errors. For long delay multipath, the receiver itself can recognize the wayward signal and discard it. To address shorter delay multipath from the signal reflecting off the ground, specialized antennas (e.g., a choke ring antenna) may be used to reduce the signal power as received by the antenna. Short delay reflections are harder to filter out because they interfere with the true signal, causing effects almost indistinguishable from routine fluctuations in atmospheric delay.
Multipath effects are much less severe in moving vehicles. When the GPS antenna is moving, the false solutions using reflected signals quickly fail to converge and only the direct signals result in stable solutions.
Ephemeris and clock errors[edit]
While the ephemeris data is transmitted every 30 seconds, the information itself may be up to two hours old. Variability in solar radiation pressure[5] has an indirect effect on GPS accuracy due to its effect on ephemeris errors. If a fast time to first fix (TTFF) is needed, it is possible to upload a valid ephemeris to a receiver, and in addition to setting the time, a position fix can be obtained in under ten seconds. It is feasible to put such ephemeris data on the web so it can be loaded into mobile GPS devices.[6] See also Assisted GPS.
The satellites’ atomic clocks experience noise and clock drift errors. The navigation message contains corrections for these errors and estimates of the accuracy of the atomic clock. However, they are based on observations and may not indicate the clock’s current state.
These problems tend to be very small, but may add up to a few meters (tens of feet) of inaccuracy.[7]
For very precise positioning (e.g., in geodesy), these effects can be eliminated by differential GPS: the simultaneous use of two or more receivers at several survey points. In the 1990s when receivers were quite expensive, some methods of quasi-differential GPS were developed, using only one receiver but reoccupation of measuring points. At the TU Vienna the method was named qGPS and post processing software was developed.[citation needed]
Dilution of precision [edit]
Selective Availability[edit]
GPS formerly included a feature called Selective Availability (SA) that added intentional, time varying errors of up to 100 meters (328 ft) to the publicly available navigation signals. This was intended to deny an enemy the use of civilian GPS receivers for precision weapon guidance.
SA errors are actually pseudorandom, generated by a cryptographic algorithm from a classified seed key available only to authorized users (the U.S. military, its allies and a few other users, mostly government) with a special military GPS receiver. Mere possession of the receiver is insufficient; it still needs the tightly controlled daily key.
Before it was turned off on May 2, 2000, typical SA errors were about 50 m (164 ft) horizontally and about 100 m (328 ft) vertically.[8] Because SA affects every GPS receiver in a given area almost equally, a fixed station with an accurately known position can measure the SA error values and transmit them to the local GPS receivers so they may correct their position fixes. This is called Differential GPS or DGPS. DGPS also corrects for several other important sources of GPS errors, particularly ionospheric delay, so it continues to be widely used even though SA has been turned off. The ineffectiveness of SA in the face of widely available DGPS was a common argument for turning off SA, and this was finally done by order of President Clinton in 2000.[9]
DGPS services are widely available from both commercial and government sources. The latter include WAAS and the U.S. Coast Guard’s network of LF marine navigation beacons. The accuracy of the corrections depends on the distance between the user and the DGPS receiver. As the distance increases, the errors at the two sites will not correlate as well, resulting in less precise differential corrections.
During the 1990–91 Gulf War, the shortage of military GPS units caused many troops and their families to buy readily available civilian units. Selective Availability significantly impeded the U.S. military’s own battlefield use of these GPS, so the military made the decision to turn it off for the duration of the war.
In the 1990s, the FAA started pressuring the military to turn off SA permanently. This would save the FAA millions of dollars every year in maintenance of their own radio navigation systems. The amount of error added was «set to zero»[10] at midnight on May 1, 2000 following an announcement by U.S. President Bill Clinton, allowing users access to the error-free L1 signal. Per the directive, the induced error of SA was changed to add no error to the public signals (C/A code). Clinton’s executive order required SA to be set to zero by 2006; it happened in 2000 once the U.S. military developed a new system that provides the ability to deny GPS (and other navigation services) to hostile forces in a specific area of crisis without affecting the rest of the world or its own military systems.[10]
On 19 September 2007, the United States Department of Defense announced that future GPS III satellites will not be capable of implementing SA,[11] eventually making the policy permanent.[12]
Anti-spoofing[edit]
Another restriction on GPS, antispoofing, remains on. This encrypts the P-code so that it cannot be mimicked by a transmitter sending false information. Few civilian receivers have ever used the P-code, and the accuracy attainable with the public C/A code was much better than originally expected (especially with DGPS), so much so that the antispoof policy has relatively little effect on most civilian users. Turning off antispoof would primarily benefit surveyors and some scientists who need extremely precise positions for experiments such as tracking tectonic plate motion.
Relativity[edit]
The theory of relativity introduces several effects that need to be taken into account when dealing with precise time measurements. According to special relativity, time passes differently for objects in relative motion. That is known as kinetic time dilation: in an inertial reference frame, the faster an object moves, the slower its time appears to pass
(as measured by the frame’s clocks). General relativity takes into account also the effects that gravity has on the passage of time. In the context of GPS the most prominent correction introduced by general relativity is gravitational time dilation: the clocks located deeper in the gravitational potential well (i.e. closer to the attracting body) appear to tick slower.
Special relativity[edit]
Special relativity predicts that as the velocity of an object increases (in a given frame), its time slows down (as measured in that frame). For instance, the frequency of the atomic clocks moving at GPS orbital speeds will tick more slowly than stationary clocks by a factor of  where the orbital velocity is v = 4 km/s and c = the speed of light. The result is an error of about -7.2 μs/day in the satellite. The special relativistic effect is due to the constant movement of GPS clocks relative to the Earth-centered, non-rotating approximately inertial reference frame. In short, the clocks on the satellites are slowed down by the velocity of the satellite. This time dilation effect has been measured and verified using the GPS.
where the orbital velocity is v = 4 km/s and c = the speed of light. The result is an error of about -7.2 μs/day in the satellite. The special relativistic effect is due to the constant movement of GPS clocks relative to the Earth-centered, non-rotating approximately inertial reference frame. In short, the clocks on the satellites are slowed down by the velocity of the satellite. This time dilation effect has been measured and verified using the GPS.
General relativity[edit]
Special relativity allows the comparison of clocks only in a flat spacetime, which neglects gravitational effects on the passage of time. According to general relativity, the presence of gravitating bodies (like Earth) curves spacetime, which makes comparing clocks not as straightforward as in special relativity. However, one can often account for most of the discrepancy by the introduction of gravitational time dilation, the slowing down of time near gravitating bodies. In case of the GPS, the receivers are closer to Earth than the satellites, causing the clocks at the altitude of the satellite to be faster by a factor of 5×10−10, or about +45.8 μs/day. This gravitational frequency shift is measurable. During early development some believed that GPS would not be affected by general relativistic effects, but the Hafele–Keating experiment showed that it would be.
Combined kinetic and gravitational time dilations[edit]
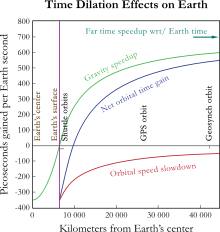
Combined, these sources of time dilation cause the clocks on the satellites to gain 38.6 microseconds per day relative to the clocks on the ground. This is a difference of 4.465 parts in 1010.[13] Without correction, errors of roughly 11.4 km/day would accumulate in the position.[14] This initial pseudorange error is corrected in the process of solving the navigation equations. In addition, the elliptical, rather than perfectly circular, satellite orbits cause the time dilation and gravitational frequency shift effects to vary with time. This eccentricity effect causes the clock rate difference between a GPS satellite and a receiver to increase or decrease depending on the altitude of the satellite.
To compensate for the discrepancy, the frequency standard on board each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[15] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.[16] Placing atomic clocks on artificial satellites to test Einstein’s general theory was proposed by Friedwardt Winterberg in 1955.[17]
Calculations[edit]
To calculate the amount of daily time dilation experienced by GPS satellites relative to Earth we need to separately determine the amounts due to the satellite’s velocity and altitude, and add them together.
Kinetic time dilation[edit]
The amount due to velocity is determined using the Lorentz transformation. The time measured by an object moving with velocity  changes by (the inverse of) the Lorentz factor:
changes by (the inverse of) the Lorentz factor:

For small values of v/c this approximates to:

The GPS satellites move at 3874 m/s relative to Earth’s center.[15] We thus determine:

This difference of 8.349×10−11 represents the fraction by which the satellites’ clocks tick slower than the stationary clocks. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks are slower than Earth’s clocks by 7214 nanoseconds a day due to their velocity.
- Note that this speed of 3874 m/s is measured relative to Earth’s center rather than its surface where the GPS receivers (and users) are. This is because Earth’s equipotential makes net time dilation equal across its geodesic surface.[18] That is, the combination of Special and General effects make the net time dilation at the equator equal to that of the poles, which in turn are at rest relative to the center. Hence we use the center as a reference point to represent the entire surface.
Gravitational time dilation[edit]
The amount of dilation due to gravity is determined using the gravitational time dilation equation:

where  is the time passed at a distance
is the time passed at a distance  from the center of the Earth and
from the center of the Earth and  is the time passed for a far away observer.
is the time passed for a far away observer.
For small values of  this approximates to:
this approximates to:

Determine the difference  between the satellite’s time
between the satellite’s time  and Earth time
and Earth time  :
:

Earth has a radius of 6,357 km (at the poles) making  = 6,357,000 m and the satellites have an altitude of 20,184 km[15] making their orbit radius
= 6,357,000 m and the satellites have an altitude of 20,184 km[15] making their orbit radius  = 26,541,000 m. Substituting these in the above equation, with Earth mass M = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:
= 26,541,000 m. Substituting these in the above equation, with Earth mass M = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:

This represents the fraction by which the clocks at satellites’ altitude tick faster than on the surface of the Earth. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks gain 45850 nanoseconds a day due to gravitational time dilation.
Combined time dilation effects[edit]
These effects are added together to give (rounded to 10 ns):
- 45850 – 7210 = 38640 ns
Hence the satellites’ clocks gain approximately 38,640 nanoseconds a day or 38.6 μs per day due to relativistic effects in total.
In order to compensate for this gain, a GPS clock’s frequency needs to be slowed by the fraction:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
This fraction is subtracted from 1 and multiplied by the pre-adjusted clock frequency of 10.23 MHz:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
That is we need to slow the clocks down from 10.23 MHz to 10.22999999543 MHz in order to negate both time dilation effects.
Sagnac distortion[edit]
GPS observation processing must also compensate for the Sagnac effect. The GPS time scale is defined in an inertial system but observations are processed in an Earth-centered, Earth-fixed (co-rotating) system. A coordinate transformation is thus applied to convert from the inertial system to the ECEF system. The resulting signal run time correction has opposite algebraic signs for satellites in the Eastern and Western celestial hemispheres. Ignoring this effect will produce an east–west error on the order of hundreds of nanoseconds, or tens of meters in position.[19]
Natural sources of interference[edit]
Since GPS signals at terrestrial receivers tend to be relatively weak, natural radio signals or scattering of the GPS signals can desensitize the receiver, making acquiring and tracking the satellite signals difficult or impossible.
Space weather degrades GPS operation in two ways, direct interference by solar radio burst noise in the same frequency band[20] or by scattering of the GPS radio signal in ionospheric irregularities referred to as scintillation.[21] Both forms of degradation follow the 11 year solar cycle and are a maximum at sunspot maximum although they can occur at any time. Solar radio bursts are associated with solar flares and coronal mass ejections (CMEs)[22] and their impact can affect reception over the half of the Earth facing the sun. Scintillation occurs most frequently at tropical latitudes where it is a night time phenomenon. It occurs less frequently at high latitudes or mid-latitudes where magnetic storms can lead to scintillation.[23] In addition to producing scintillation, magnetic storms can produce strong ionospheric gradients that degrade the accuracy of SBAS systems.[24]
Artificial sources of interference[edit]
In automotive GPS receivers, metallic features in windshields,[25] such as defrosters, or car window tinting films[26] can act as a Faraday cage, degrading reception just inside the car.
Man-made EMI (electromagnetic interference) can also disrupt or jam GPS signals. In one well-documented case it was impossible to receive GPS signals in the entire harbor of Moss Landing, California due to unintentional jamming caused by malfunctioning TV antenna preamplifiers.[27][28] Intentional jamming is also possible. Generally, stronger signals can interfere with GPS receivers when they are within radio range or line of sight. In 2002 a detailed description of how to build a short-range GPS L1 C/A jammer was published in the online magazine Phrack.[29]
The U.S. government reported that such jammers were used occasionally during the War in Afghanistan, and the U.S. military destroyed six GPS jammers during the Iraq War, including one that was destroyed with a GPS-guided bomb, noting the ineffectiveness of the jammers used in that situation.[30] A GPS jammer is relatively easy to detect and locate, making it an attractive target for anti-radiation missiles. The UK Ministry of Defence tested a jamming system in the UK’s West Country on 7 and 8 June 2007.[citation needed]
Some countries allow the use of GPS repeaters to allow the reception of GPS signals indoors and in obscured locations; while in other countries these are prohibited as the retransmitted signals can cause multi-path interference to other GPS receivers that receive data from both GPS satellites and the repeater. In the UK Ofcom now permits the use of GPS/GNSS Repeaters[31] under a ‘light licensing’ regime.
Due to the potential for both natural and man-made noise, numerous techniques continue to be developed to deal with the interference. The first is to not rely on GPS as a sole source. According to John Ruley, «IFR pilots should have a fallback plan in case of a GPS malfunction».[32] Receiver Autonomous Integrity Monitoring (RAIM) is a feature included in some receivers, designed to provide a warning to the user if jamming or another problem is detected. The U.S. military has also deployed since 2004 their Selective Availability / Anti-Spoofing Module (SAASM) in the Defense Advanced GPS Receiver (DAGR).[33] In demonstration videos the DAGR was shown to detect jamming and maintain its lock on the encrypted GPS signals during interference which caused civilian receivers to lose lock.
See also[edit]
- GPS augmentation
Notes[edit]
- ^ The same principle, and the math behind it, can be found in descriptions of pulsar timing by astronomers.
- ^ Navipedia: Troposphere Monitoring
- ^ Navipedia: Tropospheric Delay
- ^ Navipedia: Multipath
- ^ «IPN Progress Report 42-159 (2004)» (PDF).
- ^ SNT080408. «Ephemeris Server Example». Tdc.co.uk. Archived from the original on January 12, 2009. Retrieved 2009-10-13.
- ^ «Unit 1 – Introduction to GPS». Archived from the original on April 29, 2009.
- ^ Grewal (2001), p. 103.
- ^ «President Clinton Orders the Cessation of GPS Selective Availability».
- ^ a b «Statement by the President regarding the United States’ Decision to Stop Degrading Global Positioning System Accuracy». Federal Aviation Administration. May 1, 2000. Archived from the original on 2011-10-21. Retrieved 2013-01-04.
- ^ «DoD Permanently Discontinues Procurement Of Global Positioning System Selective Availability». DefenseLink. September 18, 2007. Archived from the original on February 18, 2008. Retrieved 2008-02-20.
- ^ «Selective Availability». National space-based Positioning, Navigation, and Timing Executive Committee. Archived from the original on January 13, 2008. Retrieved 2008-02-20.
- ^ Rizos, Chris. University of New South Wales. GPS Satellite Signals Archived 2010-06-12 at the Wayback Machine. 1999.
- ^ Faraoni, Valerio (2013). Special Relativity (illustrated ed.). Springer Science & Business Media. p. 54. ISBN 978-3-319-01107-3. Extract of page 54
- ^ a b c The Global Positioning System by Robert A. Nelson Via Satellite Archived 2010-07-18 at the Wayback Machine, November 1999
- ^ Pogge, Richard W. «Real-World Relativity: The GPS Navigation System». Retrieved 2008-01-25.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Archived from the original on 2014-07-03. Retrieved 2009-10-23.
- ^ S. P. Drake (January 2006). «The equivalence principle as a stepping stone from special to general relativity» (PDF). Am. J. Phys., Vol. 74, No. 1. pp. 22–25.
- ^ Ashby, Neil Relativity and GPS. Physics Today, May 2002.
- ^ Cerruti, A., P. M. Kintner, D. E. Gary, A. J. Mannucci, R. F. Meyer, P. H. Doherty, and A. J. Coster (2008), Effect of intense December 2006 solar radio bursts on GPS receivers, Space Weather, doi:10.1029/2007SW000375, October 19, 2008
- ^ Aarons, Jules; Basu, Santimay (1994). «Ionospheric amplitude and phase fluctuations at the GPS frequencies». Proceedings of ION GPS. 2: 1569–1578.
- ^ S. Mancuso and J. C. Raymond, «Coronal transients and metric type II radio bursts. I. Effects of geometry, 2004, Astronomy and Astrophysics, v.413, p.363-371′
- ^ Ledvina, B. M.; J. J. Makela & P. M. Kintner (2002). «First observations of intense GPS L1 amplitude scintillations at midlatitude». Geophysical Research Letters. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. doi:10.1029/2002GL014770. S2CID 133701419.
- ^ Tom Diehl, Solar Flares Hit the Earth- WAAS Bends but Does Not Break, SatNav News, volume 23, June 2004.
- ^ «I-PASS Mounting for Vehicles with Special Windshield Features» (PDF). Archived from the original (PDF) on March 26, 2010.
- ^ «3M Automotive Films».. Note that the ‘Color Stable’ films are specifically described as not interfering with satellite signals.
- ^ «The Hunt for RFI». GPS World. 1 January 2003.
- ^ «EMC compliance club «banana skins» column 222″. Compliance-club.com. Retrieved 2009-10-13.
- ^ Low Cost and Portable GPS Jammer. Phrack issue 0x3c (60), article 13. Published December 28, 2002.
- ^ American Forces Press Service. Centcom charts progress. March 25, 2003. Archived December 3, 2009, at the Wayback Machine
- ^ [1] Ofcom Statement on Authorisation regime for GNSS repeaters
- ^ Ruley, John. AVweb. GPS jamming. February 12, 2003.
- ^ US Army DAGR page Archived 2012-08-05 at archive.today
References[edit]
- Grewal, Mohinder S.; Weill, Lawrence Randolph; Andrews, Angus P. (2001). Global positioning systems, inertial navigation, and integration. John Wiley and Sons. ISBN 978-0-471-35032-3.
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics & Astronomy. ISBN 978-1-56347-106-3.
- Webb, Stephen (2004). Out of this world: colliding universes, branes, strings, and other wild ideas of modern physics. Springer. ISBN 0-387-02930-3. Retrieved 2013-08-16.
External links[edit]
- GPS.gov—General public education website created by the U.S. Government
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2008 version).
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2001 version).
У массового пользователя сохраняется еще вера в старые легенды, а навигационные ошибки повторяются из раза в раз и совершенно не зависят от цены и степени крутизны купленного прибора.
GPS приемники распространены уже не меньше чем мобильные телефоны, а это означает, что они стали обычным «бытовым» прибором. Современных пользователей GPS не интересует, как работает система, как летают спутники и с какой частотой на приемники приходит сигнал. Так же как мало кого из посылающих SMS интересует, где находится антенна ближайшей «соты» или мощность радиопередатчика в телефоне.
Несмотря на это, у массового пользователя сохраняется еще вера в старые легенды, а навигационные ошибки повторяются из раза в раз и совершенно не зависят от цены и степени крутизны купленного приборчика.
Сначала договоримся о терминах. GPS — это Global Positioning System, система глобального позиционирования, то есть система, дающая возможность определить свои координаты на поверхности Земли и в воздухе в любой точке. Строго говоря, термин GPS означает как американскую систему Nawstar так и российскую Глонас. Но поскольку Глонас толи работает, толи нет, и в магазинах приемники Глонас не купишь, массовый потребитель стал по умолчанию считать, что GPS это и есть исключительно система Nawstar. Если исходить из современных реалий, то с этой точкой зрения следует согласиться, несмотря на обещание правительства России ввести Глонас в строй как можно скорее. В принципе, и секстан можно отнести к GPS приборам.
Система GPS состоит из орбитальной группировки: набора спутников, наземных центров управления и ряда наземных станций. Конечным звеном в этой цепи являются различные GPS терминалы, использующиеся в самых разнообразных целях. Нас, как «пользователей-туристов» и яхтсменов, прежде всего, интересуют мобильные GPS терминалы — приемники, которые обрабатывают информацию в режиме реального времени. В отличии от разных других GPS приборов, нам нужны такие, которые определяют наше место «мгновенно» и «постоянно». Понятия эти условны, но если мы будем получать свои координаты 1 раз в секунду, то будем считать, что имеем эту информацию «непрерывно».
К наиболее устойчивым легендам о GPS Nawstar (далее просто GPS) относится то, что «американцы специально снижают точность определения координат». Из этого, якобы, следует, вывод о некоторой ограниченности применения приемника. На самом деле история такая. Действительно, в системе GPS существуют два сегмента: военный и гражданский. Военные приемники GPS способны принимать дополнительные спутниковые сигналы, которые «не слышны» гражданским приемникам. С помощью этой технологии военные пользователи системы могут получить ряд преимуществ. Кроме того, центр управления GPS может включить режим «селективного доступа», который либо, условно говоря, снижает точность гражданского приемника GPS, либо «вырубает» гражданский сегмент GPS вообще или в каком-то районе Земли.
В 2000 году президент Клинтон принял историческое решение и отменил, действовавший до того момента, режим селективного доступа. Тем самым, с 2000 года все гражданские приемники, если они исправны и «видят» достаточное количество спутников, определяют координаты примерно одинаково и с достаточной для навигации точностью. В этом легко убедиться самостоятельно. Засечь точку и вернуться в нее через какое-то время. В зависимости от условий средний GPS найдет место с точностью 3−10 метров. Иногда может получиться «тютелька в тютельку», но это скорее везение, чем точная работа прибора.
Подобной точности недостаточно для строительных, геодезических и прочих работ, но для навигации, даже воздушной, вполне хватает.
Режим селективного доступа, при этом, может быть включен по решению правительства США, но делается это в исключительных случаях, ограниченно и с заблаговременным предупреждением.
Так, например, гражданский сектор GPS был выключен во время войны в Ираке во всем районе боевых действий. Это лишило иракцев, купивших, естественно, гражданские приемники возможности использовать американские технологии в военных целях.
Следующей проблемой военных, вероятно, станут картографические он-лайн сервисы типа terraserver.com или более известный google maps. Космические снимки на них со временем, очевидно, будут обновляться все быстрее и не исключено, в принципе, что следующий шаг — это наблюдение самого себя на местности. Что было бы удобно, к примеру, для выбора места в марине и т.д. Но это надо еще подождать.
При каждом включении современный гражданский приемник GPS демонстрирует предупреждение, что он не может быть использован как единственное средство навигации. На это важное правило следует обратить внимание. Эта надпись на экране вовсе не означает, что прибор изначально неточный или производители сомневаются в его качестве. Безусловно, производители приборов хотят отгородиться от возможных судебных исков, но дело не только в этом. GPS терминал это, прежде всего, прибор, сообщающий координаты точки, в которой он находится. Прибор и его создатели не могут отвечать за все неправильные действия, которые совершили неграмотные пользователи прибора. Не надо требовать от приемника, чтобы он делал выводы. Он не умеет.
Первое, на что обращает внимание владелец прибора, что он едет «мимо карты». В том случае если в приемнике есть «зашитая» карта. Этим несовпадением точки, в которой очевидно находится пользователь прибора с точкой на карте, которую указал прибор, страдают очень большое количество приемников. Этой теме можно посвятить сколько угодно времени и статей, но будем исходить из того, что в нашу задачу не входит сделать из собственного GPS точный картплоттер. Во-первых, чтобы сделать надежный картплоттер, то есть чтобы точка в которой находится прибор, в точности совпадала с аналогичной точкой на карте, нужно хорошо разбираться в устройстве GPS. Во-вторых, нужно хорошо понимать, каким образом и кем была изначально создана карта, используемая в приборе.
Карты могут быть сделаны в разных математических моделях, то есть немного по-разному представлять форму Земного шара, из-за чего, как правило, и возникает «сдвиг» карты относительно координат, определенных прибором. Несмотря на то, что новые карты создаются в системе WGS84 (World Geodesic System 1984 года) и GPS приемник можно настроить на работу в этой системе, сохранилось огромное количество карт, созданных в других системах. Друг от друга эти карты отличаются, как правило, не сильно. Если поставить определенную с помощью GPS приемника точку на двух разных картах одной и той же местности, сделанных в разных системах, то расстояние между этими точками будет составлять десятки или сотни метров. Стоит ли эта погрешность того, чтобы влезать в прибор и в настройки карт — вопрос спорный. Но главное, что если даже потратив какие-тоусилия мы добьемся точного «попадания» точки в карту, то где гарантия, что это точное соответствие сохранится в другом районе Земли? Для морской навигации незначительный сдвиг карты совершенно не принципиален, пусть даже прибор показывает, что яхта стоит не у причала, а на берегу. Мы то знаем, что стоим у причала. По этим и другим причинам, и RYA и просто здравый смысл, запрещают использовать GPS, как единственное средство навигации. То есть подходить к причалу или в узкость следует не только глядя в прибор, но и по сторонам, как минимум. Для решения большинства задач вполне достаточно знать параметры «сдвига» карты и прочих погрешностей и учитывать их, прокладывая безопасный курс.
О таком сдвиге реального курса относительно трека GPS забыл прошлым летом шкипер яхты Fleur de Mer (типа Bowman 40) Жак Демарти (Jacques Demarty), принимавший участие в регате Blue Water Round-the World 2005?2006. За 45 лет путешествий под парусом Жак Демарти прошел более 100 тысяч морских миль. Тем не менее, зная о различии реального курса и трека GPS в 400 метров, он «просто забыл» об этом. Он провел яхту слишком близко к берегу острова Los Rocques в водах Венесуэлы и выложил лодку на тянущийся от острова риф. В прибое яхта потеряла мачту, сильно повредила корпус, а экипаж из трех человек, с большим трудом выбрался на берег.
Помогло бы шкиперу отсутствие погрешности GPS, вопрос спорный, поскольку данная ошибка исключительно «человеческого фактора». Он мог также «забыть» (случившееся он объяснил забывчивостью) что-нибудь еще.
Вторая типичная ошибка — это установка в приборе путевых точек, рекомендованных лоциями или координат таких объектов, как край волнолома или буй. Направляясь к такой путевой точке по GPS, экипаж постоянно имеет информацию о направлении на точку, оставшемся до нее расстоянии и т.д. Следует помнить при этом, что GPS определяет курс на точку по прямой, которая может проходить через другие навигационные опасности. В конце концов, велика вероятность, что лодка просто воткнется в этот буй или мол. Также она может столкнуться с другими яхтами, которые используют для навигации те же рекомендованные популярными пайлотами путевые точки. Чтобы уменьшить риск следует вводить свои собственны путевые точки, что занимает ровно столько же времени.
Третья ошибка — неправильное понимание предоставляемой прибором информации. Допустим, мы выставили путевую точку и движемся к ней по прямой. Прибор исправно докладывает о постепенном сокращении расстояния «до цели» и указывает направление на точку. Мы следуем этому указанию и стрелка, на экране, точно показывает на нос нашей лодки. Ожидаемое время прибытия в точку тоже сокращается. По неопытности пользователь может сделать вывод, что он действительно движется в нужную точку почти по прямой и раз расстояние до точки сокращается, то все в порядке. На самом деле, это серьезная ошибка. GPS не показывает боковой снос судна. При наличии течения и ветра лодку сносит с курса, а рулевой, сам того не замечая, постепенно подруливает, следуя указанию прибора, в сторону путевой точки. Для рулевого картина выглядит просто — путевая точка все время впереди. Но на самом деле яхта описывает довольно широкую дугу и запросто может налететь на препятствия, находящиеся, с точки зрения экипажа, далеко сбоку.
В моей практике была подобная ситуация при ночном переходе с острова Липари на Стромболи. Между этими островками лежит крошечный и обычно необитаемый островок Панареа, окруженный подводными скалами. В условиях ночи этот остров практически не видим, а из ориентиров, на которые можно взять пеленги только остающиеся по корме два ярких огня острова Салина. В этом месте существует сильное восточное течение. Лодку незаметно, но сильно стало сносить к востоку. GPS этот снос не демонстрировала, так как участок трека, который был виден на экране был слишком мал чтобы можно было заметить характерную дугу. Зная о подобной ситуации вахта раз в несколько минут брала пеленги на Салина, пока было возможным, а затем вела прокладку по бумажной карте, используя численные значения координат по GPS. На бумажной карте снос был очевиден и, более того, стало понятно, что лодка имеет все шансы въехать в остров Панареа. Для возвращения лодки на правильный курс пришлось направить лодку «левее» сначала на 30, потов на 60, а затем вообще на 90 градусов и еще включить мотор — так усилилось течение. В итоге остров остался по правому борту в 1,5 — 2 милях.
Чтобы компенсировать недостатки встроенной карты можно заранее внести в прибор достаточное количество путевых точек, координаты которых заранее сняты с надежной бумажной карты. Это простой и безопасный способ иметь под рукой в палубных условиях информацию о реальном положении и расстоянии до ближайших опасных объектов, мысов и т.д.
По этим причинам понятно, что использовать GPS как единственное средство навигации, неразумно. Полезно дополнять прибор компасом-пеленгатором и здравым смыслом. Их можно также использовать в случае отказа GPS по тем или иным причинам, но если прибор отказал, лучше просто включить второй GPS.
17 Сентября 2007
При приеме сигналов
от пяти или большего количества спутников
определение положения аппаратуры
потребителя может обеспечиваться со
значительной избыточностью, что допускает
обнаружение недопустимых сигналов и
использование данных от спутников с
лучшим расположением.
Однако
некоторые источники ошибок, возникающих
при работе GPS, являются трудно устранимыми.
Задержки
распространения сигнала в ионосфере и
тропосфере.
Описанный выше алгоритм предполагает,
что сигнал распространяется с непрерывной
скоростью, которая равна скорости света.
Однако в реальности скорость света
является константой только в вакууме.
Когда сигнал проходит через ионосферу
(слой заряженных частиц на высоте
130 – 290
км) и тропосферу (от
8 до 13 км от поверхности Земли),
его скорость распространения уменьшается,
что приводит к ошибкам в измерении
дальности. В современных GPS приёмниках
используют различные алгоритмы (модели)
для минимизации влияния этих задержек.
Однако, используемые
в настоящее время модели могут устранить
только половину из возможной 70 нс
задержки, что приводит к значительным
(до 10 м) ошибкам в определении
местоположения приемника.
Ошибки спутниковых
часов,
неисправленные сегментом управления,
могут приводить к ошибкам положения
приемника порядка одного метра.
Ошибки в
эфемеридных данных
обычно
незначительны и тщательно отслеживаются
со станций слежения, однако также могут
приводить ошибкам в положении аппаратуры
потребителя порядка 1 м.
Многолучевая
интерференция
также вносит ошибки в определение
местоположения с помощью GPS. Это
происходит, когда сигнал отражается от
объектов, расположенных на земной
поверхности, что создаёт заметную
интерференцию с сигналами приходящими
непосредственно со спутников. Специальная
техника обработки сигнала и продуманная
конструкция антенн позволяет свести к
минимуму этот источник ошибок. Однако
при работе в городских условиях ошибки,
вносимые многолучевой интерференцией,
могут осложнить производство работ.
Оценочное снижение точности в положении
приемника из-за этого явления – порядка
0,5 м.
До 1
мая 2000 года министерство обороны США
использовало искусственное
снижение точности
спутникового сигнала для гражданских
и неавторизированных пользователей –
избирательный доступ (Selective Availability или
S/A). Это приводило к тому, что точность
полученных
координат с
помощью C/A-кода
(30 метров) преднамеренно
снижалась до 100 метров. Однако по решению
президента США «Избирательный Доступ»
был отключен. Кроме того, S/A можно
исключить, применяя технику дифференциальной
коррекции.
Шум и систематические
ошибки смещения, объединяясь, приводят
к типичным ошибкам расстояния около
пятнадцати метров для каждого из
спутников.
Геометрический
фактор –
геометрическое понижение точности GDOP
(Geometric Dilution of Precision)
Ошибки GPS изменяются
в зависимости от взаимного расположения
спутников, используемых в навигационном
решении, и приемника. Объем фигуры,
описанной единичными векторами от
приемника до спутников, используемых
в навигационном решении, обратно
пропорционален параметру GDOP.
Плохой GDOP (большое
значение) – углы от приемника до множества
используемых спутников одинаковы (рис.
17).
|
|
|
|
Рис.
а б |


GDOP
вычисляется из геометрических связей
между положением приемника и положениями
спутников, которые приемник использует
для навигации, с использованием параметров
из процесса навигационного решения.
Ошибки дальностей до спутников умножаются
на соответствующий коэффициент GDOP для
оценки положения или ошибки времени.
Соседние файлы в папке геодезия
- #
- #
- #
- #
- #
- #
- #
- #
- #