В
любой реальной CАУ
невозможно точное равенство задающего
воздействия g
и управляемой величины y.
Ошибку САУ при этом вычислим согласно
уравнению ошибки как разность этих
воздействий, т.е.:

Учитывая
историю переходных процессов, ошибку
можно представить в виде двух составляющих:
установившейся (статической) и переходной
(динамической):

В
линейных САУ установившаяся (статическая)
ошибка определяется частным решением
её дифференциального уравнения, а
переходная (динамическая) ошибка –
решением однородного дифференциального
уравнения.
Таким
образом, установившуюся ошибку САУ в
неподвижном состоянии называют
статической, а ошибку при переходных
режимах – динамической.
Текущая
ошибка отработки переменного сигнала
называется динамической ошибкой САУ.
Динамическая ошибка системы изменяется
с течением времени. Она зависит от
структуры, параметров и характера
изменения воздействий САУ.
38 Повышение качества и синтез линейных сау
В
системе регулирования по отклонению
установившаяся [ошибка имеет три
составляющие:

(5—24)
|
где
![]()
—
ошибка воспроизведения задающего
воздействия![]()
—
ошибка, вызываемая действием возмущений;![]()
—
ошибка чувствительного элемента,
измеряющего рассогласование
Как
было показано в гл. 4, установившаяся
ошибка может [быть представлена в виде
ряда (4.3). При этом коэффициенты [ошибок
воспроизведения
![]()
вычисляют
по передаточной функции
![]()
замкнутой
системы для ошибки воспроизведения
Нужно,
заметить, что в статической системе

где
k
—
передаточный коэффициент разомкнутой
системна;![]()
—
передаточный коэффициент прямой, цепи
от возмущения
![]()
до
выходной координаты у.
Следовательно,
уменьшение установившейся ошибки
постоянных значениях задающего
воздействия и возмущения достигается
увеличением передаточного коэффициента
разомкнутой системы. Однако с
увеличением статической точности в
большинстве случаев уменьшаются запасы
устойчивости I
и при значительном увеличении k
система
становится неустойчивой.
Противоречие
между статической точностью и
устойчивостью проиллюстрировано на
рис. 5.9, где сплошными линиями показаны
логарифмические частотные характеристики
разомкнутой системы с передаточной
функцией

при
![]()
Если
передаточный коэффициент увеличить
до k
— 60,
то ЛАЧХ принимает положение, показанное
пунктиром. Частота среза увеличилась
и запас устойчивости по фазе уменьшился
с
![]()
до
![]()
Столь
малый запас по фазе совершенно недопустим.
При
повышении статической точности путем
увеличения передаточного коэффициента
k
разомкнутой
системы необходимы мероприятия для
обеспечения достаточного запаса
устойчивости. Они будут рассмотрены
в следующем параграфе. Возможно,
вообще говоря, создание такой структуры
системы, которая допускает неограниченное
увеличение передаточного коэффициента
k
разомкнутой
цепи 121.
Другой
путь повышения статической точности
— обеспечение астатизма. В астатической
системе младшие коэффициенты ошибки
имеют следующие значения:

где
k0
—
передаточный коэффициент разомкнутой
системы называемый в данном случае
добротностью системы по скорости
(или коэффициентом добротности
по скорости). Таким образом, в астатической
системе отсутствует установившаяся
ошибка от постоянного задающего
воздействия и постоянных возмущений.
Для
астатизма относительно возмущения
интегрирующее звено должно быть введено
до точки, в которой приложено возмущение
(рис. 5.10).
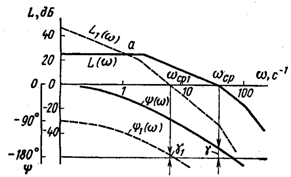
Влияние
интегрирующего звена на динамические
свойства системы
где
сплошными линиями показаны
логарифмические частотные характеристики
системы с передаточной функцией
(5.26). При введении в разомкнутую цепь
этой системы интегрирующего звена
характеристики принимают положение,
показанное пунктиром. Фазочастотная
характеристика переместилась вниз
на —90°, а амплитудно-частотная
характеристика повернулась вокруг
точки а
по
направлению часовой стрелки . В
результате запас устойчивости по фазе
уменьшился с
![]()
до
недопустимо малого значения
![]()
Система
остается устойчивой, но переходный
процесс будет сильно колебательным.
Кроме того, уменьшилась частота среза
и переходные процессы будут более
продолжительными.
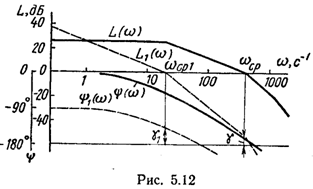
Однако
в других ситуациях введение интегрирующего
звена может не только не ухудшить, а
даже улучшить динамические свойства
системы. Пусть, например, постоянные
времени системы с передаточной функцией
(5.26) имеют следующие значения: Т1
=
= 0,05 с, Т2
=
0,0025 с и T3
= 0,001 с. Логарифмические частотные
характеристики разомкнутой системы
показаны
При
введении интегрирующего звена
характеристики принимают положение,
показанное пунктирными линиями. В
данном случае интегрирующее звено
уменьшило частоту среза, но запас
устойчивости по фазе увеличился с
![]()
|до
![]()
.
Хотя быстродействие системы
уменьшилось, но уменьшилась и
колебательность.
Таким
образом, при повышении статической
точности путем введения интегрирующего
звена могут оказаться необходимыми
мероприятия по сохранению запасов
устойчивости САУ.
Значительно
лучшие результаты получают при получении
астатизма с помощью изодромного звена,
т. е- звена с передаточной функцией
![]()
![]()
постоянная
времени изодрома.
Если
постоянная времени
![]()
достаточно
велика, то запас устойчивости может
быть сохранен неизменным. Уменьшение
передаточного коэффициента разомкнутой
системы должно быть скомпенсировано
увеличением коэффициента усиления
усилителя. Следует учитывать, что при
большом значении
могут
увеличиться старшие коэффициенты
ошибки.
Астатизм
САУ относительно задающего воздействия
можно обеспечить более простыми
способами: неединичной обратной
связью и масштабированием [3).
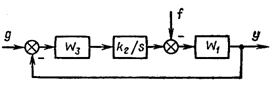
Структурная
схема системы с неединичной обратной
связью показана на рис. 5.13, а.
В
установившемся режиме регулируемая
координата связана с постоянным задающим
воздействием соотношением

(5.27)
где
kn
—
передаточный коэффициент прямой цепи
системы.
Если
выполнить основную обратную связь
системы с коэффициентом
![]()
и
система относительно задающего
воздействия будет астатической.Структурная
схема системы масштабированием входной
(величины показана на рис. 5.13, б.
Ее
особенность — наличие
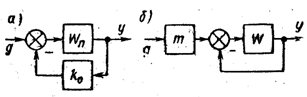
усилительного
звена с передаточным коэффициентом
m
на входе. В установившемся режиме
![]()
где
k
—
передаточный коэффициент разомкнутой
системы.
При
/л = 1 -f-
УЬ
получаем
у
= g0
и
система является астатической
относительно задающего воздействия.
Недостаток
этих способов в том, что астатизм
обеспечивается только при сохранении
указанных соотношений между передаточными
коэффициентами. Неточное определение
передаточного коэффициента какого-либо
элемента системы и его изменение в
процессе эксплуатации ведут к появлению
статической ошибки. Астатизм,
достигнутый введением интегрирующего
или изодромного звена, сохраняется и
при изменении параметров системы.
Однако нужно иметь в виду, что введение
двух интегрирующих звеньев в систему,
состоящую из усилительных, апериодических
и колебательных звеньев, сделает ее
структурно-неустойчивой. Возможно
обеспечение астатизма и более высокого
порядка. При этом из-за введения большого
числа интегрирующих или изодромных
звеньев и мероприятий, обеспечивающих
требуемые динамические свойства,
структура САУ значительно усложняется.
Компенсация
внешнего воздействия (обеспечение
инвариантности). Рассмотренные выше
способы улучшения статических и
динамических свойств системы связаны
лишь с изменениями параметров
элементов САУ и структуры ее отдельных
участков, но при этом не затрагивают
принципа действия системы.
Помимо
принципа регулирования по отклонению
существует принцип регулирования
по внешнему воздействию. Значительный
эффект дает их одновременное использование.
В этом случае системы называются
комбинированными. Кроме замкнутого
контура они имеют дополнительную
цепь влияния внешнего воздействия —
возмущения или задающего.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Определение динамических ошибок (по
скорости, по ускорению) для статической и астатических систем.
Точность АС
характеризуется величиной ошибки в установившемся режиме и зависит от характера
воздействия, а также структуры и параметров системы.
Реальные воздействия
в радиотехнических следящих системах описывается сложными (случайными)
функциями времени. Однако при анализе точности управления часто используют
простые детерминированные воздействия: постоянное ступенчатое, линейное,
квадратичное и другие. Это позволяет упростить анализ и в то же время сохранить
в модели задающего воздействия наиболее существенные признаки (начальное
значение, скорость изменения, ускорение). Большинство систем радиоавтоматики
описываются передаточными функциями вида
 , (11.1)
, (11.1)
где Ki — общее усиление
разомкнутой системы, i – число интегрирующих
звеньев, определяющее порядок астатизма системы;
– полиномы, порядок которых определяется числом типовых
звеньев (n и m соответственно инерционных и форсирующих), а
коэффициенты полиномов – постоянными времени типовых звеньев.
11.1. Статические ошибки
Ошибка системы при постоянном
(ступенчатом) воздействии x(t)=x0=const при t³0
называется статическойeст.
Для установившейся
ошибки, учитывая, что изображение X(p)=x0/p,
запишем:
 . (11.2)
. (11.2)
Для статической
системы (не содержащей интегрирующих звеньев) статическая ошибка равна
 . (11.3)
. (11.3)
Таким образом, в
статических системах установившееся значение управляемой переменной не равно
заданному: меньше на величину ошибки, значение которой обратно пропорционально
усилению К0 по постоянному току (обычно К0>>1).
Для астатических
систем (i ³ 1) ошибка при постоянном воздействии
![]() ,
,
так как числитель в (11.2) равен нулю, а знаменатель равен
Кi.
Отсутствие
статической ошибки обусловило название таких систем – астатические.
11.2. Динамические ошибки
Ошибка,
характеризующая точность замкнутой системы при меняющемся воздействии,
называется динамической eд(t).
Любое детерминированное
воздействие (при условии существования его производных d(k)/dt(k),
k=1, 2, …) можно представить в виде ряда
 , (11.4)
, (11.4)
где x0 — начальное значение, ![]() — скорость изменения,
— скорость изменения, ![]() — ускорение и т. д.
— ускорение и т. д.
Для вычисления
динамических ошибок при типовых воздействиях (линейном и квадратическом)
представим выражение для ошибки в операторной форме:
![]() (11.5)
(11.5)
Используя разложение
передаточной функции Ke(p) в ряд Маклорена по степеням
переменной р, перепишем (11.5) в виде
 (11.6)
(11.6)
где C0, C1, C2,
… — коэффициенты ошибок, определяемые
как
 (11.7)
(11.7)
Установившееся
значение ошибки при произвольном воздействии x(t)
на основании (11.6) определяется временным рядом
 (11.8)
(11.8)
Чем меньше
коэффициенты ошибок, тем выше точность системы при произвольном
детерминированном воздействии. При вычислении коэффициентов Ck
обычно ограничиваются только первыми тремя (для систем с астатизмом не выше
второго порядка).
Коэффициент C0
в соответствии с (11.7) равен
 .
.
Для статических
систем (i=0) C0=1/(1+K0), а для
астатических систем C0=0.
Определим динамические
ошибки типовых систем при линейном воздействии (изменение с постоянной
скоростью) x(t)=nxt.
В соответствии с
формулой (11.8) динамическая ошибка (ошибка по скорости) определяется как
![]() .
.
Для статической
системы она равна
так как вклад составляющей C1nx
значительно меньше, чем C0 x(t), которая растет
линейно со временем. Таким образом, скоростная ошибка в статических системах
накапливается со временем со скоростью nx/(1+K0), что делает неприемлемым использование
таких систем при меняющемся воздействии. Для астатических систем C0=0 и скоростная ошибка
![]() .
.
Нахождение
коэффициента ошибки C1 с использованием формулы (11.7)
затруднительно. Более простой способ его вычисления основан на сравнении
точного выражения для передаточной функции Ke(p) и
аппроксимирующего ее ряда:
 (11.9)
(11.9)
Уравнение (11.9)
можно представить в виде
 (11.10)
(11.10)
Полагая i= 1 (астатическая система первого порядка) и приравнивая
коэффициенты при переменной p в левой и правой частях уравнения, находим
![]()
или C1=1/K1, так как C0=0.
Таким образом,
скоростная ошибка системы первого порядка астатизма eд=nx/K1
определяется усилением разомкнутой системы K1 и не зависит от
времени. Параметр K1, имеющий размерность c –1,
называется добротностью системы по скорости (чем выше добротность, тем
точнее система).
Для астатической
системы второго порядка скоростная ошибка равна нулю, так как оба коэффициента C0=C1=0.
Равенство C1=0 вытекает из уравнения (11.10), так как в
правой части уравнения не содержится слагаемого, в которое входит переменная p
(есть только с p2 и выше).
Оценим динамические
ошибки типовых систем при квадратичном воздействии (изменение с постоянным
ускорением)![]() .
.
В соответствии с (11.8)
для динамической ошибки (ошибки по ускорению) запишем
 . (11.11)
. (11.11)
Для статической
системы ошибка по ускорению равна
 (11.12)
(11.12)
так как составляющие ошибки с коэффициентами C1 и C2
вносят пренебрежимо малый вклад в результирующую ошибку. Накопление ошибки по
квадратичному закону исключает применение статических систем при наличии
ускорения.
Для системы первого
порядка астатизма ошибка по ускорению равна
 (11.13)
(11.13)
(вкладом составляющей ![]() можно
можно
пренебречь). Накопление ошибки со временем (со скоростью ![]() ) не позволяет применять такие
) не позволяет применять такие
системы при наличии ускорения. Для астатической системы второго порядка ошибка
по ускорению равна
 . (11.14)
. (11.14)
Определение
коэффициента ошибки C2 с использованием уравнения (11.7)
сводится к приравниванию коэффициентов при p2 в обеих частях
уравнения:
 . (11.15)
. (11.15)
Откуда
C2/2=1/K2, так как C0=C1=0.
Определение динамических ошибок при работе систем управления

Authors
Раджух, М. А.
Date
2015
Bibliographic entry
Раджух, М. А. Определение динамических ошибок при работе систем управления / М. А. Раджух // Информационные технологии в образовании, науке и производстве : III Международная научно-техническая интернет-конференция, 20-21 ноября 2015 г. Секция 2 [Электронный ресурс]. — [Б. и.], 2015.
URI
https://rep.bntu.by/handle/data/21906
View/
Opredelenie_dinamicheskih_oshibok.pdf (262.4Kb)
Collections
- Материалы конференции по статьям[106]
Show full item record