Если подать на вход системы единичный
скачёк, то переходный процесс, как
правило, имеет следующий вид:
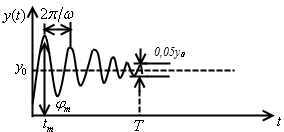
Качество переходного процесса
характеризуется параметрами:
1. максимальное перерегулирование
;
2. длительность переходного
процесса
,
определяется в момент времени, когда
выходной сигнал отличается от
установившегося значения на
![]()
;
3. время достижения первого
максимума
![]()
;
4. частота автоколебаний
;
В литературе приводятся выражения для
этих параметров для типичных передаточных
функций.
Ошибку регулирования в переходном
режиме можно определить, решая
дифференциальное уравнение или используя
преобразования Лапласа.
5.3 Определение показателей качества переходного процесса по лачх
Пусть задана структурная схема замкнутой
системы:
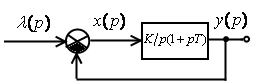

;
![]()
— характеристический полином;
— корни характеристического
полинома.
Если корни действительны
![]()
,
то выходной сигнал определяется
выражением
![]()
,
то есть является апериодическим или
экспоненциальным.
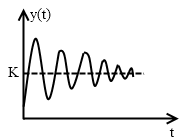
Если корни комплексные и
попарно сопряжённые
![]()
![]()
,
то выходной сигнал определяется
выражение
![]()
,
то есть выходной сигнал имеет колебательный
характер.
Рассмотрим 3 случая:
1. пусть ЛАЧХ имеет вид
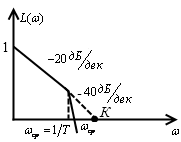
![]()
,
![]()
Корни являются комплексно сопряжёнными.
2. пусть ЛАЧХ имеет вид
Корни комплексно сопряжённые, на частота
колебаний меньше, чем в первом случае.
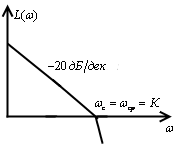
3. Пусть ЛАЧХ имеет вид:
Пусть
![]()
,
корни являются действительными,
переходный процесс является апериодическим.
Чтобы переходный процесс был
близок к апериодическому необходимо,
чтобы наклон ЛАЧХ в области частоты
среза был равен
![]()
.
Причём, чем шире зона около
с наклоном
,
тем ближе переходный процесс к
апериодическому.
5.4 Анализ линейных систем методом пространства состояний
Метода пространства состояний
предназначен для решения дифференциальных
уравнений с помощью ЭВМ. Сущность этого
метода состоит в замене скалярного
дифференциального уравнения матричным
дифференциальным уравнением первого
порядка.
5.4.1 Краткие сведения из теории матриц
Матрица таблицы чисел содержит
![]()
строк
и
![]()
столбцов,
вида:
,
где i
– номер строки,
j – номер
столбца.
Матрицу, состоящую из одного столбца,
называют вектор-столбец, а из одной
строки – вектор-строка.
Теорема сложения двух
матриц. Сумма двух
матриц
![]()
и
![]()
одинакового размера
![]()
называют матрицу
![]()
,
элементы которой равны сумме элементов
исходной матрицы
![]()
.
Теорема умножения матриц.
Произведение матрицы
размером
![]()
на матрицу
размера
![]()
называют матрицу, равной
с элементами (произведение взаимно если
![]()
)
:
.
Теорема обращения матрицы.
Матрица
![]()
является обратной матрице
,
если выполняется условие
![]()
— единичная матрица размером

.
,
где
![]()
,
такая матрица называется невырожденной,
не особенной, не сингулярной.
![]()
— алгебраическое дополнение аргумента,
где
![]()
— минор, равный определителю
![]()
порядка полученному из определителя
вычёркиванием
![]()
строки и
![]()
столбца.
Пример №1.

.
Теорема дифференцирования
и интегрирования матриц.
Для нахождения производной или интеграла
от матрицы по скалярному аргументу
необходимо вычислить их для каждого
элемента матрицы.
Матричной экспонентой называют
матрицу
![]()
,
где
— матрица,
![]()
— скалярный аргумент,
определяющейся бесконечным рядом

.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Если подать на вход системы единичный
скачёк, то переходный процесс, как
правило, имеет следующий вид:
Качество переходного процесса
характеризуется параметрами:
1. максимальное перерегулирование
;
2. длительность переходного
процесса
,
определяется в момент времени, когда
выходной сигнал отличается от
установившегося значения на
![]()
;
3. время достижения первого
максимума
![]()
;
4. частота автоколебаний
;
В литературе приводятся выражения для
этих параметров для типичных передаточных
функций.
Ошибку регулирования в переходном
режиме можно определить, решая
дифференциальное уравнение или используя
преобразования Лапласа.
5.3 Определение показателей качества переходного процесса по лачх
Пусть задана структурная схема замкнутой
системы:
;
![]()
— характеристический полином;
— корни характеристического
полинома.
Если корни действительны
![]()
,
то выходной сигнал определяется
выражением
![]()
,
то есть является апериодическим или
экспоненциальным.
Если корни комплексные и
попарно сопряжённые
![]()
![]()
,
то выходной сигнал определяется
выражение
![]()
,
то есть выходной сигнал имеет колебательный
характер.
Рассмотрим 3 случая:
1. пусть ЛАЧХ имеет вид
![]()
,
![]()
Корни являются комплексно сопряжёнными.
2. пусть ЛАЧХ имеет вид
Корни комплексно сопряжённые, на частота
колебаний меньше, чем в первом случае.
3. Пусть ЛАЧХ имеет вид:
Пусть
![]()
,
корни являются действительными,
переходный процесс является апериодическим.
Чтобы переходный процесс был
близок к апериодическому необходимо,
чтобы наклон ЛАЧХ в области частоты
среза был равен
![]()
.
Причём, чем шире зона около
с наклоном
,
тем ближе переходный процесс к
апериодическому.
5.4 Анализ линейных систем методом пространства состояний
Метода пространства состояний
предназначен для решения дифференциальных
уравнений с помощью ЭВМ. Сущность этого
метода состоит в замене скалярного
дифференциального уравнения матричным
дифференциальным уравнением первого
порядка.
5.4.1 Краткие сведения из теории матриц
Матрица таблицы чисел содержит
![]()
строк
и
![]()
столбцов,
вида:
,
где i
– номер строки,
j – номер
столбца.
Матрицу, состоящую из одного столбца,
называют вектор-столбец, а из одной
строки – вектор-строка.
Теорема сложения двух
матриц. Сумма двух
матриц
![]()
и
![]()
одинакового размера
![]()
называют матрицу
![]()
,
элементы которой равны сумме элементов
исходной матрицы
![]()
.
Теорема умножения матриц.
Произведение матрицы
размером
![]()
на матрицу
размера
![]()
называют матрицу, равной
с элементами (произведение взаимно если
![]()
)
:
.
Теорема обращения матрицы.
Матрица
![]()
является обратной матрице
,
если выполняется условие
![]()
— единичная матрица размером
.
,
где
![]()
,
такая матрица называется невырожденной,
не особенной, не сингулярной.
![]()
— алгебраическое дополнение аргумента,
где
![]()
— минор, равный определителю
![]()
порядка полученному из определителя
вычёркиванием
![]()
строки и
![]()
столбца.
Пример №1.
.
Теорема дифференцирования
и интегрирования матриц.
Для нахождения производной или интеграла
от матрицы по скалярному аргументу
необходимо вычислить их для каждого
элемента матрицы.
Матричной экспонентой называют
матрицу
![]()
,
где
— матрица,
![]()
— скалярный аргумент,
определяющейся бесконечным рядом
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Точность систем управления является
важнейшим показателем их качества. Чем выше точность, тем выше качество
системы. Однако предъявление повышенных требований к точности вызывает
неоправданное удорожание системы, усложняет ее конструкцию. Недостаточная
точность может привести к несоответствию характеристик системы условиям
функционирования и необходимости ее повторной разработки. Поэтому на этапе
проектирования системы должно быть проведено тщательное обоснование требуемых
показателей точности.
В этом разделе рассматриваются методы
определения ошибок, возникающих при работе систем управления с детерминированными
входными воздействиями. Вначале анализируются ошибки систем в переходном
режиме. Затем особое внимание уделено простым способам расчета ошибок систем в
установившемся режиме. Будет показано, что все системы управления можно разделить
по величине установившихся ошибок на системы без памяти, так называемые статические
системы, и системы, обладающие памятью, – астатические
системы управления.
Типовые
входные воздействия
Для оценки качества работы систем
управления рассматривают их поведение при некоторых типовых воздействиях.
Обычно такими воздействиями служат следующие три основные вида функций:
а) ступенчатое воздействие: g(t) =  , g(p) =
, g(p) = ![]() ;
;
б) линейное воздействие: g(t) = ![]() t , t > 0
t , t > 0
; ![]() ;
;

в) квадратичное воздействие:
![]() /2 , t > 0 ;
/2 , t > 0 ;
g(p) = ![]() .
.
В
некоторых случаях рассматривают обобщенное полиномиальное воздействие:
![]() , t > 0.
, t > 0.
Ступенчатое воздействие является одним
из простейших, но именно с его помощью определяется ряд важных свойств систем
управления, связанных с видом переходного процесса. Линейное и квадратичное
воздействия часто бывают связаны с задачами слежения за координатами
движущегося объекта. Тогда линейное воздействие соответствует движению объекта
с постоянной скоростью; квадратичное — движению объекта с постоянным ускорением.
Переходные процессы при типовых
воздействиях можно построить следующим образом. Пусть задана передаточная
функция замкнутой системы управления W(p). Тогда
x(p)
= W(p) g(p),
где g(p) – изображение соответствующего воздействия.
Например, если ![]() , то
, то ![]() и для g(t) = g0
и для g(t) = g0
получим ![]() .
.
С помощью вычетов или по таблицам
находим обратное преобразование Лапласа и получаем вид переходного процесса x(t)
для заданного входного воздействия:
![]() ,
,
где Res
x(p)
– вычет функции x(p)
в точке a.
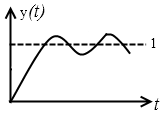
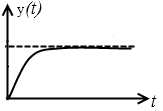
Обычно реакция системы на ступенчатое
воздействие имеет вид, показанный на рис. 21,а или рис. 21,б.
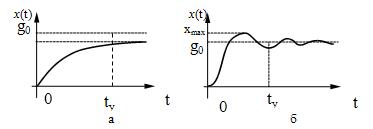
Рис.
21.
Переходный процесс,
как правило, характеризуют двумя параметрами – длительностью переходного
процесса (временем установления) и величиной перерегулирования.
Под временем установления tу
понимают временной интервал, по истечении которого отклонение |x(t) — xуст
| выходного процесса от установившегося значения xуст не
превышает определенную величину, например, 0,1gо. Время
установления является важным параметром САУ, позволяющим оценить ее быстродействие.
Величину tу можно оценить приближенно по амплитудно-частотной
характеристике системы. При заданной частоте среза ![]() . Для оценки качества системы
. Для оценки качества системы
используется также величина перерегулирования, определяемая соотношением ![]() .
.
В зависимости от
характера собственных колебаний системы переходный процесс в ней может быть
колебательным, как это показано на рис. 21, б, или плавным гладким, называемым
апериодическим (рис. 21,а). Если корни характеристического уравнения системы
действительны, то переходный процесс в ней апериодический. В случае
комплексных корней характеристического уравнения собственные колебания
устойчивой системы управления являются затухающими гармоническими и переходный
процесс в системе имеет колебательный характер.
При малом запасе устойчивости САУ ее
собственные колебания затухают медленно, и перерегулирование в переходном режиме
получается значительным. Как следствие, величина перерегулирования может
служить мерой запаса устойчивости системы. Для многих систем запас
устойчивости считается достаточным, если величина перерегулирования ![]() .
.
Установившийся
режим
При проектировании систем управления
часто требуется оценить ошибку слежения в установившемся режиме ![]() . В зависимости от
. В зависимости от
вида воздействия и свойств системы эта ошибка может быть нулевой, постоянной
или бесконечно большой величиной.
Очень важно, что величина
установившейся ошибки может быть легко найдена с помощью теоремы о предельном
значении оригинала: ![]() .
.
При использовании этой теоремы нужно
выразить величину ошибки e (p) через g(p). Для этого рассмотрим
структурную схему замкнутой системы управления (рис. 22).
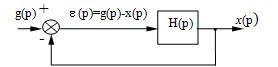
Рис.
22
Очевидно, e (p) = g(p) — x(p)
= g(p) — H(p)e(p). Отсюда ![]() или e (p) = He(p)g(p)
или e (p) = He(p)g(p)
, где He(p) = ![]() называется передаточной функцией
называется передаточной функцией
системы управления от входного воздействия g(p) к ошибке слежения e(p).
Таким образом, величину установившейся ошибки можно найти с помощью следующего
соотношения:
![]() ,
,
где He(p) = 1/(1+H(p));
g(p) — изображение типового входного воздействия.
Пример 1. Рассмотрим
систему управления, в составе которой нет интеграторов, например,
![]() .
.
Найдем величину установившейся
ошибки при ступенчатом входном воздействии g(t) = g0, t ³ 0.
В этом случае
 .
.
Предположим теперь, что входное
воздействие изменяется линейно ![]() t или
t или ![]() .
.
Тогда ![]() . Соответствующие входные воздействия и
. Соответствующие входные воздействия и
переходные процессы можно представить графиками на рис. 23,а и б.
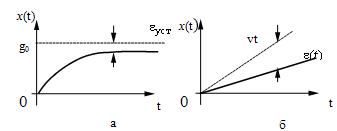
Рис.
23
Пример 2. Рассмотрим
теперь систему, содержащую один интегратор. Типичным примером может быть
система сервопривода (рис. 6) с ![]() .
.
Для ступенчатого воздействия g(t) = g0
или g(p) = ![]() получим
получим
 .
.
При линейном входном воздействии
 .
.
Такие процессы можно проиллюстрировать
соответствующими кривыми на рис.24, а и б.
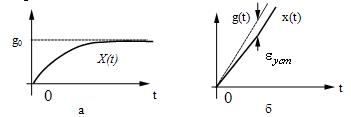
Рис.
24
Пример 3.
Рассмотрим систему с двумя интеграторами. Пусть, например, ![]() . При ступенчатом
. При ступенчатом
воздействии  .
.
При линейном  .
.
Наконец, если входное воздействие
квадратичное g(t) = at2/2 (g(p) = a/p3),
то
 .
.
Таким образом, в системе с двумя
интеграторами может осуществляться слежение за квадратичным входным
воздействием при конечной величине установившейся ошибки. Например, можно
следить за координатами объекта, движущегося с постоянным ускорением.
Статические
и астатические системы управления
Анализ рассмотренных примеров
показывает, что системы управления, содержащие интегрирующие звенья, выгодно
отличаются от систем без интеграторов. По этому признаку все системы делятся на
статические системы, не содержащие интегрирующих звеньев, и астатические
системы, которые содержат интеграторы. Системы с одним интегратором называются
системами с астатизмом первого порядка. Системы с двумя интеграторами –
системами с астатизмом второго порядка и т.д.
Для статических систем даже при
неизменяющемся воздействии g(t) = g0 установившаяся ошибка имеет
конечную величину g(t) = g0 . В системах с астатизмом первого
порядка при ступенчатом воздействии установившаяся ошибка равна нулю, но при линейно
изменяющемся воздействии ![]() . Наконец, в системах с астатизмом
. Наконец, в системах с астатизмом
второго порядка ненулевая установившаяся ошибка появляется только при
квадратичных входных воздействиях g(t) = at2 /2 и
составляет величину eуст =
a/k.
Какие же физические причины лежат в
основе таких свойств астатических систем управления?
Рассмотрим систему управления с
астатизмом второго порядка (рис. 25)
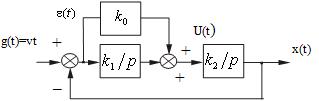
Рис.
25
Пусть входной сигнал системы управления
изменяется линейно: ![]()
![]() t. Как было
t. Как было
установлено, в такой системе установившаяся ошибка равна нулю, т.е. e
(t) =0. Каким же образом система работает при нулевом сигнале ошибки? Если x(t)
= ![]() t , то на
t , то на
входе второго интегратора должен быть сигнал ![]() . Действительно, при нулевом
. Действительно, при нулевом
рассогласовании e (t) =0 в системе с интеграторами
возможно существование ненулевого выходного сигнала первого интегратора ![]() . Первый интегратор
. Первый интегратор
после окончания переходного процесса «запоминает» скорость изменения входного
воздействия и в дальнейшем работа системы управления осуществляется по
«памяти». Таким образом, физическим объяснением такого значительного различия
статических и астатических систем является наличие памяти у астатических систем
управления.
*
* *
Итак, существуют простые возможности
определения важнейшего показателя систем управления – величины их динамических
ошибок. Детальный анализ переходных процессов в системах управления обычно
выполняют с помощью моделирования на ПЭВМ. Вместе с тем величины
установившихся ошибок легко находятся аналитически. При этом астатические
системы управления, т.е. системы с интеграторами, имеют существенно лучшие
показатели качества по сравнению со статическими системами.
Динамическая ошибка
Cтраница 3
Динамическая ошибка переходного процесса зависит только от KOQ и всегда остается постоянной независимо от настройки регулятора. Если при наладке системы регулятор настроен на переходный процесс, соответствующий границе апериодичности, и необходимо перенастроить систему на колебательный переходный процесс, достаточно увеличить ер в восемь раз.
[31]
Динамическая ошибка инерционного звена первого порядка уменьшается по экспоненциальному закону.
[33]
Динамической ошибкой в процессе регулирования называется разность между теоретическим установившимся значением выходной величины по окончании переходного процесса и действительным ее значением в данный момент времени.
[35]
Динамическими ошибками механизма называется разность сил реакций в действительном и идеальном механизмах при одинаковых положениях ведущих звеньев. Эти ошибки получаются в виде отклонений сил реакций или реактивных импульсов.
[36]
Динамической ошибкой контрольно-измерительного прибора называют разность показаний при переходном ( неустановившемся) и статическом режимах его эксплуатации при одной и той же измеряемой величине.
[37]
Поскольку динамическая ошибка является характеристикой установившегося режима, то выходная функция определяется частным решением дифференциального уравнения. Коэффициенты 1Н определяются только параметрами системы и не зависят от формы входного сигнала, поэтому целесообразно выбрать вид входного сигнала ф — ф ( 1 таким, чтобы определение аь было наиболее простым.
[38]
Рассмотрим динамические ошибки, неизбежно сопровождающие измерения переменных во времени расходов, и дадим им определение.
[39]
Чем больше динамическая ошибка, тем постоянная времени оптимальной модели меньше.
[40]
Уменьшение динамических ошибок достигается не бесплатно; оно может, во-первых, приводить к ухудшению некоторых других динамических критериев качества. Так, например, стабилизация угловой скорости машины в установившемся режиме с помощью дополнительной маховой массы сопровождается в общем случае увеличением динамических нагрузок в передаточном механизме. Во-вторых, введение системы управления движением приводит к усложнению структуры машины, а зачастую и к увеличению потребляемой мощности. Факторы такого рода могут быть условно названы расходами на управление. Все это показывает, что качество системы управления движением должно характеризоваться комбинированными критериями, учитывающими как уровень динамических ошибок, так и уровни динамических нагрузок и расходов на управление. Рассмотрим некоторые критерии качества управления, учитывающие отмеченные выше обстоятельства.
[41]
Величина динамической ошибки при изменении скорости подач незначительна и практически может считаться равной нулю. Погрешность обработки деталей с учетом всех технологических факторов ( отжатие инструмента, биение фрезы и неточности программирования) не превышает 0 05 мм для деталей, имеющих контур в виде окружности.
[43]
Появление динамических ошибок связано с изменением аналоговой величины в течение цикла преобразования. Циклические преобразователи чаще всего выполняют с промежуточным преобразованием исходной величины во временной интервал, в частоту или фазу напряжения.
[44]
Страницы:
1
2
3
4
Если подать на вход системы единичный
скачёк, то переходный процесс, как
правило, имеет следующий вид:
Качество переходного процесса
характеризуется параметрами:
1. максимальное перерегулирование
;
2. длительность переходного
процесса
,
определяется в момент времени, когда
выходной сигнал отличается от
установившегося значения на
![]()
;
3. время достижения первого
максимума
![]()
;
4. частота автоколебаний
;
В литературе приводятся выражения для
этих параметров для типичных передаточных
функций.
Ошибку регулирования в переходном
режиме можно определить, решая
дифференциальное уравнение или используя
преобразования Лапласа.
5.3 Определение показателей качества переходного процесса по лачх
Пусть задана структурная схема замкнутой
системы:
;
![]()
— характеристический полином;
— корни характеристического
полинома.
Если корни действительны
![]()
,
то выходной сигнал определяется
выражением
![]()
,
то есть является апериодическим или
экспоненциальным.
Если корни комплексные и
попарно сопряжённые
![]()
![]()
,
то выходной сигнал определяется
выражение
![]()
,
то есть выходной сигнал имеет колебательный
характер.
Рассмотрим 3 случая:
1. пусть ЛАЧХ имеет вид
![]()
,
![]()
Корни являются комплексно сопряжёнными.
2. пусть ЛАЧХ имеет вид
Корни комплексно сопряжённые, на частота
колебаний меньше, чем в первом случае.
3. Пусть ЛАЧХ имеет вид:
Пусть
![]()
,
корни являются действительными,
переходный процесс является апериодическим.
Чтобы переходный процесс был
близок к апериодическому необходимо,
чтобы наклон ЛАЧХ в области частоты
среза был равен
![]()
.
Причём, чем шире зона около
с наклоном
,
тем ближе переходный процесс к
апериодическому.
5.4 Анализ линейных систем методом пространства состояний
Метода пространства состояний
предназначен для решения дифференциальных
уравнений с помощью ЭВМ. Сущность этого
метода состоит в замене скалярного
дифференциального уравнения матричным
дифференциальным уравнением первого
порядка.
5.4.1 Краткие сведения из теории матриц
Матрица таблицы чисел содержит
![]()
строк
и
![]()
столбцов,
вида:
,
где i
– номер строки,
j – номер
столбца.
Матрицу, состоящую из одного столбца,
называют вектор-столбец, а из одной
строки – вектор-строка.
Теорема сложения двух
матриц. Сумма двух
матриц
![]()
и
![]()
одинакового размера
![]()
называют матрицу
![]()
,
элементы которой равны сумме элементов
исходной матрицы
![]()
.
Теорема умножения матриц.
Произведение матрицы
размером
![]()
на матрицу
размера
![]()
называют матрицу, равной
с элементами (произведение взаимно если
![]()
)
:
.
Теорема обращения матрицы.
Матрица
![]()
является обратной матрице
,
если выполняется условие
![]()
— единичная матрица размером
.
,
где
![]()
,
такая матрица называется невырожденной,
не особенной, не сингулярной.
![]()
— алгебраическое дополнение аргумента,
где
![]()
— минор, равный определителю
![]()
порядка полученному из определителя
вычёркиванием
![]()
строки и
![]()
столбца.
Пример №1.
.
Теорема дифференцирования
и интегрирования матриц.
Для нахождения производной или интеграла
от матрицы по скалярному аргументу
необходимо вычислить их для каждого
элемента матрицы.
Матричной экспонентой называют
матрицу
![]()
,
где
— матрица,
![]()
— скалярный аргумент,
определяющейся бесконечным рядом
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Точность систем управления является
важнейшим показателем их качества. Чем выше точность, тем выше качество
системы. Однако предъявление повышенных требований к точности вызывает
неоправданное удорожание системы, усложняет ее конструкцию. Недостаточная
точность может привести к несоответствию характеристик системы условиям
функционирования и необходимости ее повторной разработки. Поэтому на этапе
проектирования системы должно быть проведено тщательное обоснование требуемых
показателей точности.
В этом разделе рассматриваются методы
определения ошибок, возникающих при работе систем управления с детерминированными
входными воздействиями. Вначале анализируются ошибки систем в переходном
режиме. Затем особое внимание уделено простым способам расчета ошибок систем в
установившемся режиме. Будет показано, что все системы управления можно разделить
по величине установившихся ошибок на системы без памяти, так называемые статические
системы, и системы, обладающие памятью, – астатические
системы управления.
Типовые
входные воздействия
Для оценки качества работы систем
управления рассматривают их поведение при некоторых типовых воздействиях.
Обычно такими воздействиями служат следующие три основные вида функций:
а) ступенчатое воздействие: g(t) = , g(p) = ![]() ;
;
б) линейное воздействие: g(t) = ![]() t , t > 0
t , t > 0
; ![]() ;
;
в) квадратичное воздействие:
![]() /2 , t > 0 ;
/2 , t > 0 ;
g(p) = ![]() .
.
В
некоторых случаях рассматривают обобщенное полиномиальное воздействие:
![]() , t > 0.
, t > 0.
Ступенчатое воздействие является одним
из простейших, но именно с его помощью определяется ряд важных свойств систем
управления, связанных с видом переходного процесса. Линейное и квадратичное
воздействия часто бывают связаны с задачами слежения за координатами
движущегося объекта. Тогда линейное воздействие соответствует движению объекта
с постоянной скоростью; квадратичное — движению объекта с постоянным ускорением.
Переходные процессы при типовых
воздействиях можно построить следующим образом. Пусть задана передаточная
функция замкнутой системы управления W(p). Тогда
x(p)
= W(p) g(p),
где g(p) – изображение соответствующего воздействия.
Например, если ![]() , то
, то ![]() и для g(t) = g0
и для g(t) = g0
получим ![]() .
.
С помощью вычетов или по таблицам
находим обратное преобразование Лапласа и получаем вид переходного процесса x(t)
для заданного входного воздействия:
![]() ,
,
где Res
x(p)
– вычет функции x(p)
в точке a.
Обычно реакция системы на ступенчатое
воздействие имеет вид, показанный на рис. 21,а или рис. 21,б.
Рис.
21.
Переходный процесс,
как правило, характеризуют двумя параметрами – длительностью переходного
процесса (временем установления) и величиной перерегулирования.
Под временем установления tу
понимают временной интервал, по истечении которого отклонение |x(t) — xуст
| выходного процесса от установившегося значения xуст не
превышает определенную величину, например, 0,1gо. Время
установления является важным параметром САУ, позволяющим оценить ее быстродействие.
Величину tу можно оценить приближенно по амплитудно-частотной
характеристике системы. При заданной частоте среза ![]() . Для оценки качества системы
. Для оценки качества системы
используется также величина перерегулирования, определяемая соотношением ![]() .
.
В зависимости от
характера собственных колебаний системы переходный процесс в ней может быть
колебательным, как это показано на рис. 21, б, или плавным гладким, называемым
апериодическим (рис. 21,а). Если корни характеристического уравнения системы
действительны, то переходный процесс в ней апериодический. В случае
комплексных корней характеристического уравнения собственные колебания
устойчивой системы управления являются затухающими гармоническими и переходный
процесс в системе имеет колебательный характер.
При малом запасе устойчивости САУ ее
собственные колебания затухают медленно, и перерегулирование в переходном режиме
получается значительным. Как следствие, величина перерегулирования может
служить мерой запаса устойчивости системы. Для многих систем запас
устойчивости считается достаточным, если величина перерегулирования ![]() .
.
Установившийся
режим
При проектировании систем управления
часто требуется оценить ошибку слежения в установившемся режиме ![]() . В зависимости от
. В зависимости от
вида воздействия и свойств системы эта ошибка может быть нулевой, постоянной
или бесконечно большой величиной.
Очень важно, что величина
установившейся ошибки может быть легко найдена с помощью теоремы о предельном
значении оригинала: ![]() .
.
При использовании этой теоремы нужно
выразить величину ошибки e (p) через g(p). Для этого рассмотрим
структурную схему замкнутой системы управления (рис. 22).
Рис.
22
Очевидно, e (p) = g(p) — x(p)
= g(p) — H(p)e(p). Отсюда ![]() или e (p) = He(p)g(p)
или e (p) = He(p)g(p)
, где He(p) = ![]() называется передаточной функцией
называется передаточной функцией
системы управления от входного воздействия g(p) к ошибке слежения e(p).
Таким образом, величину установившейся ошибки можно найти с помощью следующего
соотношения:
![]() ,
,
где He(p) = 1/(1+H(p));
g(p) — изображение типового входного воздействия.
Пример 1. Рассмотрим
систему управления, в составе которой нет интеграторов, например,
![]() .
.
Найдем величину установившейся
ошибки при ступенчатом входном воздействии g(t) = g0, t ³ 0.
В этом случае
.
Предположим теперь, что входное
воздействие изменяется линейно ![]() t или
t или ![]() .
.
Тогда ![]() . Соответствующие входные воздействия и
. Соответствующие входные воздействия и
переходные процессы можно представить графиками на рис. 23,а и б.
Рис.
23
Пример 2. Рассмотрим
теперь систему, содержащую один интегратор. Типичным примером может быть
система сервопривода (рис. 6) с ![]() .
.
Для ступенчатого воздействия g(t) = g0
или g(p) = ![]() получим
получим
.
При линейном входном воздействии
.
Такие процессы можно проиллюстрировать
соответствующими кривыми на рис.24, а и б.
Рис.
24
Пример 3.
Рассмотрим систему с двумя интеграторами. Пусть, например, ![]() . При ступенчатом
. При ступенчатом
воздействии .
При линейном .
Наконец, если входное воздействие
квадратичное g(t) = at2/2 (g(p) = a/p3),
то
.
Таким образом, в системе с двумя
интеграторами может осуществляться слежение за квадратичным входным
воздействием при конечной величине установившейся ошибки. Например, можно
следить за координатами объекта, движущегося с постоянным ускорением.
Статические
и астатические системы управления
Анализ рассмотренных примеров
показывает, что системы управления, содержащие интегрирующие звенья, выгодно
отличаются от систем без интеграторов. По этому признаку все системы делятся на
статические системы, не содержащие интегрирующих звеньев, и астатические
системы, которые содержат интеграторы. Системы с одним интегратором называются
системами с астатизмом первого порядка. Системы с двумя интеграторами –
системами с астатизмом второго порядка и т.д.
Для статических систем даже при
неизменяющемся воздействии g(t) = g0 установившаяся ошибка имеет
конечную величину g(t) = g0 . В системах с астатизмом первого
порядка при ступенчатом воздействии установившаяся ошибка равна нулю, но при линейно
изменяющемся воздействии ![]() . Наконец, в системах с астатизмом
. Наконец, в системах с астатизмом
второго порядка ненулевая установившаяся ошибка появляется только при
квадратичных входных воздействиях g(t) = at2 /2 и
составляет величину eуст =
a/k.
Какие же физические причины лежат в
основе таких свойств астатических систем управления?
Рассмотрим систему управления с
астатизмом второго порядка (рис. 25)
Рис.
25
Пусть входной сигнал системы управления
изменяется линейно: ![]()
![]() t. Как было
t. Как было
установлено, в такой системе установившаяся ошибка равна нулю, т.е. e
(t) =0. Каким же образом система работает при нулевом сигнале ошибки? Если x(t)
= ![]() t , то на
t , то на
входе второго интегратора должен быть сигнал ![]() . Действительно, при нулевом
. Действительно, при нулевом
рассогласовании e (t) =0 в системе с интеграторами
возможно существование ненулевого выходного сигнала первого интегратора ![]() . Первый интегратор
. Первый интегратор
после окончания переходного процесса «запоминает» скорость изменения входного
воздействия и в дальнейшем работа системы управления осуществляется по
«памяти». Таким образом, физическим объяснением такого значительного различия
статических и астатических систем является наличие памяти у астатических систем
управления.
*
* *
Итак, существуют простые возможности
определения важнейшего показателя систем управления – величины их динамических
ошибок. Детальный анализ переходных процессов в системах управления обычно
выполняют с помощью моделирования на ПЭВМ. Вместе с тем величины
установившихся ошибок легко находятся аналитически. При этом астатические
системы управления, т.е. системы с интеграторами, имеют существенно лучшие
показатели качества по сравнению со статическими системами.
Динамическая ошибка
Cтраница 3
Динамическая ошибка переходного процесса зависит только от KOQ и всегда остается постоянной независимо от настройки регулятора. Если при наладке системы регулятор настроен на переходный процесс, соответствующий границе апериодичности, и необходимо перенастроить систему на колебательный переходный процесс, достаточно увеличить ер в восемь раз.
[31]
Динамическая ошибка инерционного звена первого порядка уменьшается по экспоненциальному закону.
[33]
Динамической ошибкой в процессе регулирования называется разность между теоретическим установившимся значением выходной величины по окончании переходного процесса и действительным ее значением в данный момент времени.
[35]
Динамическими ошибками механизма называется разность сил реакций в действительном и идеальном механизмах при одинаковых положениях ведущих звеньев. Эти ошибки получаются в виде отклонений сил реакций или реактивных импульсов.
[36]
Динамической ошибкой контрольно-измерительного прибора называют разность показаний при переходном ( неустановившемся) и статическом режимах его эксплуатации при одной и той же измеряемой величине.
[37]
Поскольку динамическая ошибка является характеристикой установившегося режима, то выходная функция определяется частным решением дифференциального уравнения. Коэффициенты 1Н определяются только параметрами системы и не зависят от формы входного сигнала, поэтому целесообразно выбрать вид входного сигнала ф — ф ( 1 таким, чтобы определение аь было наиболее простым.
[38]
Рассмотрим динамические ошибки, неизбежно сопровождающие измерения переменных во времени расходов, и дадим им определение.
[39]
Чем больше динамическая ошибка, тем постоянная времени оптимальной модели меньше.
[40]
Уменьшение динамических ошибок достигается не бесплатно; оно может, во-первых, приводить к ухудшению некоторых других динамических критериев качества. Так, например, стабилизация угловой скорости машины в установившемся режиме с помощью дополнительной маховой массы сопровождается в общем случае увеличением динамических нагрузок в передаточном механизме. Во-вторых, введение системы управления движением приводит к усложнению структуры машины, а зачастую и к увеличению потребляемой мощности. Факторы такого рода могут быть условно названы расходами на управление. Все это показывает, что качество системы управления движением должно характеризоваться комбинированными критериями, учитывающими как уровень динамических ошибок, так и уровни динамических нагрузок и расходов на управление. Рассмотрим некоторые критерии качества управления, учитывающие отмеченные выше обстоятельства.
[41]
Величина динамической ошибки при изменении скорости подач незначительна и практически может считаться равной нулю. Погрешность обработки деталей с учетом всех технологических факторов ( отжатие инструмента, биение фрезы и неточности программирования) не превышает 0 05 мм для деталей, имеющих контур в виде окружности.
[43]
Появление динамических ошибок связано с изменением аналоговой величины в течение цикла преобразования. Циклические преобразователи чаще всего выполняют с промежуточным преобразованием исходной величины во временной интервал, в частоту или фазу напряжения.
[44]
Страницы:
1
2
3
4
Если подать на вход системы единичный
скачёк, то переходный процесс, как
правило, имеет следующий вид:
Качество переходного процесса
характеризуется параметрами:
1. максимальное перерегулирование
;
2. длительность переходного
процесса
,
определяется в момент времени, когда
выходной сигнал отличается от
установившегося значения на
![]()
;
3. время достижения первого
максимума
![]()
;
4. частота автоколебаний
;
В литературе приводятся выражения для
этих параметров для типичных передаточных
функций.
Ошибку регулирования в переходном
режиме можно определить, решая
дифференциальное уравнение или используя
преобразования Лапласа.
5.3 Определение показателей качества переходного процесса по лачх
Пусть задана структурная схема замкнутой
системы:
;
![]()
— характеристический полином;
— корни характеристического
полинома.
Если корни действительны
![]()
,
то выходной сигнал определяется
выражением
![]()
,
то есть является апериодическим или
экспоненциальным.
Если корни комплексные и
попарно сопряжённые
![]()
![]()
,
то выходной сигнал определяется
выражение
![]()
,
то есть выходной сигнал имеет колебательный
характер.
Рассмотрим 3 случая:
1. пусть ЛАЧХ имеет вид
![]()
,
![]()
Корни являются комплексно сопряжёнными.
2. пусть ЛАЧХ имеет вид
Корни комплексно сопряжённые, на частота
колебаний меньше, чем в первом случае.
3. Пусть ЛАЧХ имеет вид:
Пусть
![]()
,
корни являются действительными,
переходный процесс является апериодическим.
Чтобы переходный процесс был
близок к апериодическому необходимо,
чтобы наклон ЛАЧХ в области частоты
среза был равен
![]()
.
Причём, чем шире зона около
с наклоном
,
тем ближе переходный процесс к
апериодическому.
5.4 Анализ линейных систем методом пространства состояний
Метода пространства состояний
предназначен для решения дифференциальных
уравнений с помощью ЭВМ. Сущность этого
метода состоит в замене скалярного
дифференциального уравнения матричным
дифференциальным уравнением первого
порядка.
5.4.1 Краткие сведения из теории матриц
Матрица таблицы чисел содержит
![]()
строк
и
![]()
столбцов,
вида:
,
где i
– номер строки,
j – номер
столбца.
Матрицу, состоящую из одного столбца,
называют вектор-столбец, а из одной
строки – вектор-строка.
Теорема сложения двух
матриц. Сумма двух
матриц
![]()
и
![]()
одинакового размера
![]()
называют матрицу
![]()
,
элементы которой равны сумме элементов
исходной матрицы
![]()
.
Теорема умножения матриц.
Произведение матрицы
размером
![]()
на матрицу
размера
![]()
называют матрицу, равной
с элементами (произведение взаимно если
![]()
)
:
.
Теорема обращения матрицы.
Матрица
![]()
является обратной матрице
,
если выполняется условие
![]()
— единичная матрица размером
.
,
где
![]()
,
такая матрица называется невырожденной,
не особенной, не сингулярной.
![]()
— алгебраическое дополнение аргумента,
где
![]()
— минор, равный определителю
![]()
порядка полученному из определителя
вычёркиванием
![]()
строки и
![]()
столбца.
Пример №1.
.
Теорема дифференцирования
и интегрирования матриц.
Для нахождения производной или интеграла
от матрицы по скалярному аргументу
необходимо вычислить их для каждого
элемента матрицы.
Матричной экспонентой называют
матрицу
![]()
,
где
— матрица,
![]()
— скалярный аргумент,
определяющейся бесконечным рядом
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Динамическая ошибка
Cтраница 3
Динамическая ошибка переходного процесса зависит только от KOQ и всегда остается постоянной независимо от настройки регулятора. Если при наладке системы регулятор настроен на переходный процесс, соответствующий границе апериодичности, и необходимо перенастроить систему на колебательный переходный процесс, достаточно увеличить ер в восемь раз.
[31]
Динамическая ошибка инерционного звена первого порядка уменьшается по экспоненциальному закону.
[33]
Динамической ошибкой в процессе регулирования называется разность между теоретическим установившимся значением выходной величины по окончании переходного процесса и действительным ее значением в данный момент времени.
[35]
Динамическими ошибками механизма называется разность сил реакций в действительном и идеальном механизмах при одинаковых положениях ведущих звеньев. Эти ошибки получаются в виде отклонений сил реакций или реактивных импульсов.
[36]
Динамической ошибкой контрольно-измерительного прибора называют разность показаний при переходном ( неустановившемся) и статическом режимах его эксплуатации при одной и той же измеряемой величине.
[37]
Поскольку динамическая ошибка является характеристикой установившегося режима, то выходная функция определяется частным решением дифференциального уравнения. Коэффициенты 1Н определяются только параметрами системы и не зависят от формы входного сигнала, поэтому целесообразно выбрать вид входного сигнала ф — ф ( 1 таким, чтобы определение аь было наиболее простым.
[38]
Рассмотрим динамические ошибки, неизбежно сопровождающие измерения переменных во времени расходов, и дадим им определение.
[39]
Чем больше динамическая ошибка, тем постоянная времени оптимальной модели меньше.
[40]
Уменьшение динамических ошибок достигается не бесплатно; оно может, во-первых, приводить к ухудшению некоторых других динамических критериев качества. Так, например, стабилизация угловой скорости машины в установившемся режиме с помощью дополнительной маховой массы сопровождается в общем случае увеличением динамических нагрузок в передаточном механизме. Во-вторых, введение системы управления движением приводит к усложнению структуры машины, а зачастую и к увеличению потребляемой мощности. Факторы такого рода могут быть условно названы расходами на управление. Все это показывает, что качество системы управления движением должно характеризоваться комбинированными критериями, учитывающими как уровень динамических ошибок, так и уровни динамических нагрузок и расходов на управление. Рассмотрим некоторые критерии качества управления, учитывающие отмеченные выше обстоятельства.
[41]
Величина динамической ошибки при изменении скорости подач незначительна и практически может считаться равной нулю. Погрешность обработки деталей с учетом всех технологических факторов ( отжатие инструмента, биение фрезы и неточности программирования) не превышает 0 05 мм для деталей, имеющих контур в виде окружности.
[43]
Появление динамических ошибок связано с изменением аналоговой величины в течение цикла преобразования. Циклические преобразователи чаще всего выполняют с промежуточным преобразованием исходной величины во временной интервал, в частоту или фазу напряжения.
[44]
Страницы:
1
2
3
4
Постановка задачи. Критерии качества переходных процессов
Любая система автоматического регулирования, для того чтобы удовлетворять своему назначению, прежде всего, должна быть устойчивой. Однако устойчивость является необходимым, но недостаточным условием технической пригодности системы регулирования. Помимо устойчивости, к переходному процессу предъявляются требования, обуславливающие его так называемые показатели.
Качество функционирования АСР оценивается прямыми показателями оценки качества переходных процессов в замкнутой АСР. К ним относятся:
Соответственно основными критериями качества системы управления являются:
1) Устойчивость системы;
2) Максимальная динамическая ошибка
3) Статическая ошибка;
4) Время регулирования ;
5) Величина перерегулирования;
6) Степень затухания переходного процесса;
7) Степень колебательности.
Как всякая динамическая система, САУ может находиться в одном из двух режимов — стационарном (установившемся) и переходном. Стационарный режим может быть двух типов: статический и динамический. В статическом режиме, при котором все внешние воздействия и параметры системы не меняются, качество управления характеризуется точностью.
Исчерпывающее представление о качестве переходного процесса дает, естественно, сама кривая процесса. Однако при разработке САУ необходимо иметь возможность судить об основных показателях качества переходного процесса без построения их кривых, по каким-либо косвенным признакам, которые определяются более просто и, кроме того, позволяют связать показатели качества непосредственно со значениями параметров САУ. Такие косвенные признаки называются критериями качества переходного процесса.
Существуют три группы критериев качества: корневые, интегральные и частотные.
Группа корневых критериев основана на оценке качества переходного процесса по значениям полюсов и нулей передаточной функции САУ. В частном случае, когда нулей нет, качество переходного процесса определяется только полюсами.
Переходный процесс в устойчивой системе распадается на затухающие и колебательные составляющие. Если найти длительность самой длительной составляющей и величину колебательности самой колебательной составляющей, то по ним можно оценить верхние пределы величин длительности и колебательности всего переходного процесса.
Интегральными критериями качества называются такие, которые одним числом оценивают и величины отклонений, и время затухания переходного процесса. Такие критерии качества используются для определения оптимальных значений варьируемых параметров по минимуму значения соответствующей интегральной оценки. Применяются интегральные критерии обычно в теории оптимальных систем.
Наибольшее распространение получили частотные критерии, в основу которых положено использование частотных характеристик.
Рассмотрим некоторые критерии качества работы САУ:
1) Статическая ошибка (имеет место только в П — регуляторе) — это отклонение регулируемого параметра от заданного в установившемся режиме (точность системы);

.
Если в числителе передаточной функции системы нет свободного члена, то статическая ошибка равна нулю;
2) Динамическая ошибка — это максимальное рассогласование между заданной и текущей траекторией в переходном режиме;
3) Время регулирования — это время, в течение которого переходный процесс войдет в зону допустимой погрешности регулирования , где определяется следующим образом:

.
4)Величина перерегулирования — определяется как отношение амплитуды второй полуволны к первой

.
5)Степень затухания

учитывая, что
.
C данным критерием тесно связан еще один параметр-степень колебательности системы

;
Данные критерии взаимосвязаны следующими соотношениями:

.
Проведя небольшой анализ приведенных соотношений, можно выделить два крайних состояния системы:
а) апериодический процесс , ;
б) незатухающие колебания , .
Часто в расчетах применяют , .
Все системы регулирования рассчитываются с заданным значением либо , либо . Система регулирования считается настроенной оптимально, если она удовлетворяет двум или трем показателям качества. Например, максимальная динамическая ошибка, степень затухания, время регулирования удовлетворяют заданным значениям.
7. Временные характеристики систем. Качество переходного процесса. Типовые переходные процессы. Переходные характеристики систем.
Временные характеристики систем.
Временная характеристика системы представляет собой изменение выходной величины во времени при подаче на ее вход типового апериодического воздействия. В качестве последнего используют единичное ступенчатое воздействие, или единичный импульс. При единичном ступенчатом воздействии (рис. 1-5, а) входная величина мгновенно возрастает от нуля до единицы и далее остается неизменной. Единичное ступенчатое воздействие, или единичная ступенчатая функция 1(t) описывается выражением:


Импульс, величина которого равна бесконечности, длительность — нулю, а площадь — единице (рис. 1-5,б) называется единичным импульсом. Его аналитическое выражение называют единичной импульсной функцией, или дельта-функцией, и обозначают через δ(t).
Дельта-функцию при условии, что  записывают так:
записывают так:

Переходная характеристика — это частный случай временной характеристики при подаче на вход элемента или системы единичного ступенчатого возмущения. Ее обозначают через h(t). Таким образом, если xвх(t)=1(t), то xвых(t)=h(t).
Рекомендуемые материалы
Импульсная переходная характеристика — это временная характеристика при подаче на вход элемента или системы единичного импульса. Ее аналитическим выражением является импульсная переходная функция, или весовая функция (функция веса) w(t). Следовательно, xвых(t)= w(t) при xвх(t)= δ(t). Между переходной и весовой функциями линейных звеньев наблюдается зависимость, аналогичная вышеприведенной:

Качество переходного процесса определяется по показателям, которые характеризуют отклонение реального процесса от желаемого; они показывают насколько точно и как быстро после нанесения единичного ступенчатого воздействия (при нулевых начальных условиях) в системе устанавливается равновесное состояние. Качество переходного процесса количественно оценивается следующими показателями (рис. 1-6).

Статическая ошибка регулирования уст есть рассогласование между установившимся значением регулируемой величины после переходного процесса и ее заданным значением

или в относительных единицах

Динамическая ошибка регулирования yдин есть максимальное отклонение регулируемой величины в переходном процессе от ее заданного значения

или в относительных величинах

Время регулирования tp есть отрезок, в течение которого регулируемая величина достигает нового установившегося значения с некоторой заранее установленной точностью ±ε.
Перерегулирование представляет собой максимальное отклонение регулируемой величины от установившегося значения, выраженное в процентах, от уст

При расчетах автоматических систем регулирования технологических процессов перерегулирование переходного процесса оценивают также выраженным в процентах отношением второй и первой амплитуд колебаний, направленных в противоположные стороны.
Интегральная квадратичная ошибка регулирования представляет собой квадрат площади между кривой переходного процесса и новым установившимся состоянием системы:

Чем меньше статическая и динамическая ошибки, время регулирования и т. д., тем выше качество переходного процесса.
Типовые переходные процессы. Из устойчивых переходных процессов в качестве оптимального с точки зрения требований технологии выбирают один из трех типовых процессов:
7. Планирование производства и составление графика — лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
— граничный апериодический процесс с минимальным временем регулирования tp, min (рис. 1-7,а);
— процесс с 20%-ным перерегулированием (рис. 1-7,6);
— процесс с минимальной квадратичной площадью отклонения (рис. 1-7, в)
Граничный апериодический процесс характеризуется отсутствием перерегулирования, минимальным общим временем регулирования и наименьшим по сравнению с другими типовыми переходными процессами воздействием регулятора на объект (это наименьшее воздействие вызывает наибольшее отклонение регулируемой величины от заданного значения). Такой переходный процесс используется в качестве оптимального при значительном влиянии регулирующего воздействия на другие технологические величины объекта при отклонении основной регулируемой величины для того, чтобы свести их отклонение к минимуму.
Процесс с 20%-ным перерегулированием характеризуется большей величиной регулирующего воздействия, чем в предыдущем случае, и меньшим отклонением регулируемой величины; при этом время регулирования несколько возрастает. Этот процесс выбирается в качестве оптимального в случаях, когда допустимо некоторое перерегулирование.
Процесс с минимальной квадратичной площадью отклонения регулируемой величины обладает значительным (до 40%) перерегулированием, большим временем регулирования и наименьшей величиной максимального динамического отклонения регулируемой величины. Он имеет место при большей по сравнению с описанными выше процессами величине регулирующего воздействия и применяется в качестве оптимального, если величина динамического отклонения параметра должна быть минимальной.
Механика гидро — и пневмоприводов
Переходные процессы в гидро — и пневмоприводах
Показатели качества переходных процессов
Системы с гидро — и пневмоприводами во время эксплуатации подвергаются как управляющим, так и возмущающим воздействиям, в результате которых происходят изменения состояния систем во времени. В реальных условиях воздействия на систему чаще всего бывают случайными, вызывая в системе случайные или стохастические процессы. На практике сведения о характеристиках случайных воздействий на системы с гидро — и пневмоприводами, как и на многие другие технические системы, обычно крайне ограничены, поэтому при исследованиях динамических свойств систем широко применяют так называемые детерминированные воздействия. Типовыми детерминированными воздействиями являются: ступенчатое, импульсное и гармоническое. При последнем виде воздействия рассматривают поведение системы в частотной области сигналов, в которой достаточно эффективно можно решать задачи устойчивости систем, а также исследовать влияние различных факторов на динамические характеристики отдельных элементов и систем в целом.
В частотной области сигналов хорошо сочетаются рассчитанные по математическим моделям характеристики части устройств исследуемой системы с экспериментальными характеристиками тех устройств, для которых по каким-либо причинам математические модели не могли быть составлены. Благодаря отмеченным достоинствам методы исследований и расчетов систем в частотной области сигналов широко используют на практике. Однако если при гармонических воздействиях сравнительно просто провести испытания отдельных устройств и какой-то части системы, то натурные испытания систем, содержащих сложные объекты (энергетические установки, летательные аппараты, строительно-дорожные машины), далеко не всегда осуществимы.
В связи с чем наряду с частотными методами не менее широко применяют методы исследований и расчетов систем во временной области. При этом определяют переходные процессы, вызванные в системах ступенчатыми или импульсными воздействиями. Первые из них проще воспроизвести в реальных условиях, что облегчает проверку адекватности рассчитанных и полученных в результате физических экспериментов переходных процессов. К тому же процессы при ступенчатом воздействии на систему дают достаточно наглядное представление о таких динамических свойствах систем, как быстродействие, колебательность и продолжительность процесса.
Если линейная математическая модель системы в необходимой мере отражает динамику реальной системы, то по переходным процессам при ступенчатых воздействиях можно вычислить переходные процессы при импульсных воздействиях,
А также найти те и другие по частотным характеристикам системы.
При наличии в системе существенно нелинейных звеньев такой пересчет процессов будет приближенным и не исключает получения неверных результатов.
На рис. 6.16 изображены основные виды переходных процессов, вызванных ступенчатыми воздействиями на систему, математическая модель которой близка к линейной. Переходный процесс 1 называют колебательным, переходный процесс 2 — монотоннным, переходный процесс 3 — апериодическим. В устойчивой системе, описываемой линейным дифференциальным уравнением, выходная величина у приближается к своему установившемуся значению уж при < —> оо, поэтому продолжительность переходного процесса оценивают по значению времени <П) при котором значения у отличаются от Уоо на ±Ау00. Эта величина определяет “канал” допустимых отклонений у, при которых процесс считается закончившимся. Для колебательного процесса кроме указывают время первого согласования изменяющегося значения у со своим установившимся значением уоо. Чем меньше тем выше быстродействие системы. Показателем колебательности процесса является число периодов Гпер, находящихся в пределах времени Обычно считают, что это число не должно быть более 1,5 … 2,0. Важной величиной, характеризующей колебательный процесс, является максимальная динамическая ошибка (при Ь = Ьм)
Отах = —Х ~-—100 %, (6.112)
Уоо
Которая для большинства систем не должна превышать 25 … …30%.
Время переходного процесса, размер “канала” допускаемых отклонений выходной величины и максимальная динамическая ошибка определяют границы области (отмечены на рис. 6.16 штриховкой), в которой должен располагаться график допускаемого для системы переходного процесса.
Монотонный и апериодический переходные процессы оценивают по времени <п — У одной и той же системы при разном

Рис. 6.16. Различные виды переходных процессов
Выборе параметров, влияющих на вид переходного процесса, значение получается больше при апериодическом или монотонном процессе, чем в случае колебательного процесса. Поэтому наибольшее быстродействие достигается в системе с колебательным процессом. Если быстродействие несущественно, а необходимо обеспечить плавный переход системы из одного состояния в другое, то апериодический процесс будет лучше коле бательного.
Для качественного управления объектом важны не только вид и показатели переходных процессов, но и точность, с которой при заданных входных воздействиях устанавливаются значения выходных величин. Точность управления системами с гидро — и пневмоприводами зависит от многих факторов, к числу которых относятся силы сухого трения, действующие на отдельные элементы приводов, утечки рабочих сред в управляющих устройствах и исполнительных двигателях, люфты в механических соединениях, электромагнитный гистерезис в электромеханических преобразователях сигналов и др. Но даже при совершенном исполнении всех устройств гидро — и пневмопривода, практически исключающих все подобные факторы, точность управления во многом будет предопределена
той структурой системы, которую можно описать линеинои математической моделью. Чтобы пояснить это утверждение, рассмотрим сначала применяемый в теории управления метод оценки ошибок при установившихся режимах систем.
С этой целью воспользуемся структурной схемой, изображенной на рис. 4.2, в, и передаточной функцией (4.61), из которых при отрицательной обратной связи получим
С(5,=тжмм,)’ (6Ш)
Если входное воздействие является ступенчатым (см. рис. 6.17), то
 £^вх(0
£^вх(0
Рис. 6.17. График ступенчатой функции
Изображение по Лапласу функции (6.114) найдем по формуле (4.45):
![]()
Оо
МЮ = I е~а*ивхЦ)(И = —
= (6.115)
5
С учетом изображения (6.115) формулу (6.113) представим в виде
+ (6’Ш) В соответствии со свойством преобразования Лапласа значение функции оригинала /(<) при t —> оо можно вычислить по изображению Р(з) при 5 —► 0 с помощью равенства пределов
Нш /(<) = Нш зР(з).
*—юо з—►О
Обозначив установившуюся ошибку 6уст и применив формулы (6.116) и (6.117), найдем
<уст — йо L + H’wVo. cM’ (вл18)
Следящие гидро — и пневмоприводы в большинстве случаев имеют отрицательные обратные связи по положению выходного звена. Для таких приводов примем, что
^о. с(5) = — Кп. ОС —
Кроме того, структурные схемы силовых частей приводов, как было показано в главе 5 (см. рис. 5.3 и 5.5), могут содержать интегрирующее звено. Если для этих силовых частей значение коэффициента внутренней обратной связи (Кк или Кн) пренебрежимо мало, а управляющая часть не содержит интегрирующих звеньев, то используя формулу (6.118), можно получить
(вл19)
Где Ку — коэффициент усиления всего разомкнутого контура, значение которого возрастает с увеличением добротности силовой части привода и коэффициента усиления управляющей части.
Из соотношения (6.119) следует, что при наличии в контуре привода интегрирующего звена £уст = 0, когда UK = const. При изменении UK с постоянной скоростью, т. е. dUK/dt = = const, движение выходного звена происходит с постоянной ошибкой по скорости. Эта ошибка будет тем меньше, чем больше значение коэффициента Ку. Последнее обстоятельство объясняет причину, по которой может потребоваться увеличить значение добротности привода. Кроме того, с увеличением добротности привода обычно возрастает его быстродействие. Однако повышение добротности ограничено условием устойчивости, что, в частности, показывает неравенство
(6.14).
Если коэффициент (Кя или Kni) внутренней обратной связи у силовой части привода нельзя принять равным нулю,
То передаточная функция разомкнутого контура привода при 5 —> 0 будет приближаться к апериодическому звену первого порядка, а не к интегрирующему звену. В этом случае установившаяся ошибка определяется соотношением
^уст = (6.120)
Где К — коэффициент усиления всего разомкнутого контура привода, не содержащего интегрирующее звено.
В соответствии с формулой (6.120) для уменьшения установившейся ошибки в конце переходного процесса, вызванного ступенчатым воздействием, необходимо увеличивать коэффициент усиления разомкнутого контура. Однако, как и в предыдущем случае, такое увеличение коэффициента усиления свыше определенного значения нарушает условие устойчивости привода.
Выбор параметров и расчет переходных процессов
При проектировании систем с гидро — и пневмоприводами необходимо выполнять противоречащие друг другу условия, по которым для обеспечения высокого быстродействия и малых установившихся ошибок следует увеличивать коэффициент усиления разомкнутого контура привода, а для сохранения устойчивости системы — не превышать допустимых для этого коэффициента значений.
Параметры привода, удовлетворяющие указанным условиям, предварительно можно выбрать с помощью ЛАХ и ЛФХ разомкнутого контура так, чтобы обеспечивались рекомендуемые запасы по фазе и амплитуде (см. § 6.1).
Если наибольшая из постоянных времени управляющей части привода на порядок меньше любой из постоянных времени силовой части, то для приближенного выбора параметров привода можно воспользоваться графиками, разделяющими плоскость коэффициентов характеристического уравнения, записанного в предложенной И. А. Вышнеградским форме. Эти графики приведены на рис. 6.18.
Параметры А и В являются коэффициентами уравнения
ГЪ + Ах2 + Вг + 1 = 0,
И 2 И 5 6 7 6 9 10 11А Рис. в.18. Области параметров системы третьего порядка при различных видах переходных процессов
В которое можно преобразовать характеристическое уравнение рассматриваемой системы
Аз А3 а>22 И — а^А -1- ао = 0, (6.121)
Вводя новую переменную
V а0
И используя соотношения
А = -^==; (6.122)
У«оа|
В = —(6.123)
Формулы (6.122) и (6.123) позволяют найти по параметрам А и В, которые соответствуют указанным на графиках переходным процессам, значения двух коэффициентов характеристического уравнения (6.121) при известном третьем коэффициенте.
Например, в случае следящего гидромеханического привода с дроссельным регулированием, для которого были получены характеристическое уравнение (6.12) и условие устойчивости (6.14), формулы (6.122) и (6.123) имеют вид
![]()
Б = , 1 (6.125)
По соотношениям (6.124) и (6.125) можно, выбрав параметры А и Б с учетом требуемого переходного процесса и вычислив по формуле (5.27) постоянную времени Тц, найти коэффициент £ц относительного демпфирования и добротность Бт гидропривода. Затем с помощью формул (5.29) и (6.15) можно рассчитать коэффициенты линеаризованной расходно — перепадной характеристики золотникового устройства, а по ним получить его основные размеры. Коэффициент Кос обратной связи обычно известен заранее, так как от него зависит перемещение выходного звена привода, которое вызывает заданное значение входного сигнала.
В современных методах теории управления для расчетов на ЭВМ переходных процессов применяют различные программы. Одни из таких программ основаны на математических моделях, представленных в виде уравнений вход-выход, другие — на математических моделях, описывающих рассматриваемые системы в переменных состояния. Первого вида программы обычно предусматривают использование структурных схем как линейных, так и нелинейных систем, причем в обоих случаях все переменные являются функциями времени, а не их изображениями по Лапласу. В связи с чем величина
5, которая в передаточных функциях звеньев таких структурных схем уже не является переменной в преобразовании Лапласа, должна рассматриваться как оператор дифференцирования, т. е. в = р1 (см. гл. 4).
Очень важно также иметь в виду, что при расчете по линейным математическим моделям входные воздействия не должны превышать те значения, при которых какая-либо из переменных может быть реально осуществимой в данной системе. Это условие необходимо учитывать особенно в тех случаях, когда при расчете используются размерные значения переменных. В случае применения безразмерных переменных и
правильном выборе базовых величин при нормировании уравнений данное условие автоматически выполняется.
Для примера перейдем к безразмерным переменным в математической модели электрогидравлического следящего привода, структурную схему которого получим, объединив структурные схемы силовой части гидропривода с дроссельным регулированием (см. рис. 5.3, а) и электрогидравлического усилителя (см. рис. 5.10). В результате будем иметь структурную схему, изображенную на рис. 6.19, где Кп, ос — коэффициент преобразователя сигналов обратной связи от выходного звена (перемещение штока гидроцилиндра) к входу электронного усилителя с коэффициентом Кус.
Кррі+Кур+Крух
I-__________ т’——А
Ллос
И.
Рис. 6.19. Структурная схема электрогидравлического следящего привода
Безразмерные переменные обозначим чертой сверху, а базовые величины — верхним индексом При этом размерные и безразмерные переменные будут связаны соотношениями:
Иъх = ^вхивх ие = иеие 1 = ФяЪФяЪ Ф* = ФяФя’) х3 = х*хъ ушт = ушхушх; ^я1 ~
Чтобы после перехода к безразмерным величинам не произошло искусственного изменения коэффициента усиления разомкнутого контура системы, значения базовых величин необходимо согласовать между собой. Для этого за основную базовую величину примем перемещение золотника X* = я3.шах-
Тогда
* * *у
UBX = «е = к V. ;
Лусл*м
I* — ^1-
У ~ К ’
— ^ВХ.

![]()
*п. ос
1 + ■К’я^.К’осЛ «i» КрруКрух) *#
![]()
^я1 “ IV’ ^3 5
Лх(р
¥>я =

![]() Кх<р
Кх<р
В безразмерных переменных математическое описание отдельных участков структурной схемы можно представить следующими уравнениями:
KycKiuK^iKi _
<Ря’1~ TyS + l Ue’
1 ~ T%s + 2№ + 1 Ve;
_ _
Хз = vпп^;
1 ЯuiT_T252 + 2Cur45 + lяi;
_ #4-
Y’ = TTsX>’
Ue = иВх ~ ^п. о.с^5Ушт!
‘fie = ^6 ^«,1 ~ (Koc.1 «i» KtppyKpyx)K$X3.
В эти уравнения входят дополнительные коэффициенты, обеспечивающие согласование базовых величин и имеющие следующие значения:
*i = <xMi; *2 = v*/*о; Кз = хУ<р*я) Ki = x*jy*;
КЬ = я7<x; JT6 = Vhlvl
При расчете переходного процесса, вызванного ступенчатым воздействием, по математической модели привода с безразмерными переменными значение ^вх можно принять единичным ступенчатым. В теории управления такое воздействие (единичный скачок) обозначают функцией 1(/). Однако в данном случае
ПЪХ — 1(0
Вызовет безразмерное перемещение золотника х3 = 1, что соответствует язтах. Если переходный процесс будет колебательным, то в какие-то моменты времени получатся значения х3 > 1, что может противоречить условию применимости линейной модели привода. Поэтому с запасом на максимальную динамическую ошибку при переходном процессе правильнее принять иъх = 0,65… 0,75.
На рис. 6.20 показан график переходного процесса, рассчитанный для электрогидравлического следящего привода по модели с безразмерными переменными (штриховкой ограничены области, выделенные на рис. 6.16). Чтобы получить размерные значения входной и выходной величин, их безразмерные значения следует умножить на базовые величины.

Рис. 6.20. Переходный процесс, рассчитанный по безразмерной математической модели электрогидравлического следящего привода
Если для расчета переходного процесса предполагается применить типовые программы для решения дифференциальных уравнений, то рассмотренную математическую модель (при s = d/dt) можно привести к системе уравнений, записанных в форме Коши. Аналогично составляют в безразмерном виде нелинейные математические модели систем с гидро — и пневмоприводами.
Переходные процессы, полученные для одной и той же системы с разными значениями отдельных параметров, а также для различающихся по конструктивному исполнению систем, сравнивают либо по указанным в начале параграфа показателям (<7щах>*п>£уст)> либо с помощью интегральных оценок. Достаточно распространена оценка в виде интеграла
Оо
![]()
О
Где <т — модуль текущей динамической ошибки, для системы с приводом а = у — ук; ук — установившееся значение координаты выходного звена, в отсутствие установившейся ошибки Ук — Уоо •
Синтез обратных связей в системах с приводами
С интегральными оценками процессов связаны решения задач оптимального управления различными системами. Для линейной системы, описываемой уравнениями (см. гл. 4)
![]() Dx а / . ✓
Dx а / . ✓
— = А(<)х + В(<) и;
У = С («)х,
При начальных условиях х(*о) = хо задача оптимального управления состоит в том, чтобы найти управление иОПт(0> обеспечивающее минимум функционала где (%’ = <Э'(<) и К = Щ*) — положительно определенные симметричные матрицы при < і < *к! Рі — неотрицательно определенная симметричная матрица.
В такой постановке задачи предполагается, что А(<) есть непрерывная функция времени, а В (і), С(/), Q,(^), И(<) — кусочно-непрерывные функции времени, кроме того, все эти матричные функции ограничены.
Наиболее сложно выбрать матрицы Рі, Q/ и К, которые в функционале (6.128) являются матрицами весовых коэффициентов. Для определения этих матриц выделяют интегральную квадратичную ошибку управления
/(ут<і’у)Л,
О
Интегральную квадратичную входную переменную
J (итКи)(И
О
И квадратичную терминальную ошибку, характеризующую конечное состояние системы (при / = /к). Затем матрицы весовых коэффициентов назначают исходя из допустимых средних квадратичных ошибок и допустимых значений входной переменной.
При решении задачи о выборе оптимальных обратных связей (регуляторов) функционал (6.128) представляют в виде
Ік
1= у*(хт<3х + итКді) <И + хт(/к)Ріх(/к), (6.129)
О
Где <3 = (^(^(^'(^С^) — неотрицательно определенная симметричная матрица.
Решение может быть получено на основе принципа максимума Понтрягина и другими методами, подробно рассмотренными в теории управления. При решении учитывают, что в случае управления с обратной связью существует зависимость
Вектора u(t) от вектора х(/). Эту зависимость получают с помощью симметричной матрицы Р(/) изменяющихся во времени коэффициентов. Для определения матрицы Р(/) используют уравнение
^ = — РА(0 — АТ(*)Р + PB(*)R-1BTP — Q (6.130) dt
С граничными условиями P(tK) = Pl-
По аналогии с обыкновенным дифференциальным уравнением для одной зависимой переменной матричное дифференциальное уравнение (6.130) называют уравнением Риккати. Это уравнение в соответствии с заданным граничным условием решают в интервале времени от tK до <о = 0. Задача упрощается, если матрицы А, В, С, Q и R не зависят от времени, а поведение системы рассматривается в большом интервале времени. Тогда верхний предел интеграла (6.129) можно принять равным бесконечности, а Р = 0. В результате матричное дифференциальное уравнение (6.130) становится алгебраическим уравнением
РА + АТР — PBR_1BTP + Q = 0. (6.131)
После того, как вычислена матрица Р, оптимальное управление определяется уравнением
И = — Кх, (6.132)
Где К = R-1BTP
Рассмотрим в качестве примера задачу об оптимальном управлении выходным звеном гидропривода с дроссельным регулированием. Предположим, что параметры привода позволяют пренебречь сжимаемостью рабочей среды. При этом условии уравнение (5.24) можно упростить и записать в виде
![]() ^Ушт. Зц ^Ушт 1 QO
^Ушт. Зц ^Ушт 1 QO
К,(ет)
Воспользуемся следующими переменными состояния:
Dx 1
Ушт — ^ — х2
И представим уравнение (6.133) системой двух уравнений йх 1
-Ж = хг’
<1×2 _ -^п ,
<Й «г-Й’рр Х2 К<Эрт Хз’
А Г° 1 ^ 5п
А = , где а = ——
—а/ тКп
![]() Для этой системы
Для этой системы
^<?Р
Вследствие того, что система имеет одну входную величину и = х3 и одну выходную величину 2/шт = у, матрица В редуцируется в вектор-столбец
ь) ’ Где “ КЯрт ’ а уравнение выхода имеет вид
У = (1 0)х.
Для данной системы уравнение (6.131) представим в виде
Р(2 Л)+(! -°<1)1>-р(б) ?(0 Ь)1>+
![]() (£) (1 0) = 0, (6.134)
(£) (1 0) = 0, (6.134)
_ (Р11 Р12 Л.
Р21 Р22/
Г — весовой коэффициент, учитывающий энергетические затраты на управление.
Удовлетворяющие решению уравнения (6.134) элементы матрицы Р определяют соотношения:
Ф / 2 26 Ри = туа +^;
Ф
Р12 = Р21 = — у;
Согласно уравнению (6.132), для оптимального управления гидроприводом необходимо, чтобы
Х3 = —Кх,
Где
![]()
![]()
Компонентами вектора х здесь являются перемещение ушт и скорость (1ушт/(И штока гидроцилиндра. Поэтому полученное значение К показывает, что при принятых выше допущениях для осуществления оптимального управления гидроприводом следует применить кроме обратной связи по перемещению выходного звена еще обратную связь по его скорости.
При таких обратных связях замкнутый контур гидропривода описывается уравнением
![]()
Где

С учетом сжимаемости рабочей среды алгоритм оптимального управления гидроприводом может усложниться.
Рассмотренные в данном учебнике вопросы раскрывают основные особенности гидро — и пневмоприводов, вызванные взаимодействием их элементов с рабочими, средами, которое влияет на эффективность использования энергии, устойчивость и точность выполняемых приводами операций. К тому же гидро — и пневмоприводы представляют собой системы, процессы в которых существенно зависят как от характеристик
Отдельных устройств, так и от свойств, возникающих вследствие соединения устройств между собой. В связи с чем системный подход к задачам механики гидро — и пневмоприводов, описанный в учебнике, может быть полезен при их создании и использовании в различных машинах, аппаратах, станках и других технических объектах.
Устойчивость следящих гидро — и пневмоприводов зависит, как было показано ранее, от ряда факторов. К таким факторам относятся силы трения, утечки и перетечки рабочей среды в устройствах гидро — и …
Управляющие устройства вместе с силовой частью гидро — и пневмопривода образуют динамические системы, которые, как сказано в § 6.1, должны, прежде всего, удовлетворять условиям устойчивости. Если математическая модель системы представлена …