4.В. К определению вероятности по- падания я прямоугольник Трехмерный нормальный закон распределения независимых случайных величин при совпадении центра рассеивания с началом координат характеризуется плотностью вероятности вида «я гэ м — — — — + — +— я Р юя,2 7′(х, у, «), е ( )Чю„ояе Вероятность попадания в прямоугольный параллелепипед со сторонами, параллельными главным осям рассеивания, определяется по таблице функций Лапласа путем умножения вероятностей Р(хь <Х <хе) Р(у~ < у<ус) Р(«с< Х<«е). Поверхность, в каждой точке которой плотность в ности г (х,, «~1= сть вероят- ,г (х, у, «)=сова(, представляет собой поверхность эллипсоида, обычно называемого эллипсоидом рассеивания.
4.3. ДИНАМИЧЕСКИЕ ОШИБКИ НАВЕДЕНИЯ РАКЕТЫ НА ЦЕЛЬ Основными характеристиками любой системы автоматического управления являются статическая и динамическая точность ее работы. Статическая точность оценивается величйной установившейся ошибки (ошибки в значении регули. 144 руемого параметра после окончания переходного процесса), а динамическая точность — способностью воспроизведения управляющего воздействия в переходном процессе. Система наведения ракет не имеет установившихся состояний.
Входное, изменяющееся во времени воздействие, обусловленное движением цели, а также продольным движением ракеты, действует на систему непрерывно. Контур управления, статические и динамические свойства которого определенным образом оптимизированы, отрабатывает это воздействие в общем случае с некоторой ошибкой, называемой динамической. Следовательно, динамической ошибкой наведения ракеты на цель принято йазывать отклонение ракеты от цели в картинной плоскости, возникшее в результате отработки ракетой внешних воздействий на систему наведения, обусловленных движением цели, а также продольным движением ракеты. При этом предпо,нагается, что входное воздействие не имеет случайных помех и инструментальных ошибок. Динамика процесса наведения зависит от коэффициента усиления и быстродействия контура управления. Для определения быстродействия систем автоматического регулирования применяются различные критерии.
Их использование обусловлено конкретными условиями задачи. Если, например, динамические свойства системы определены ее частотной характеристикой, в качестве основного критерия для оценки быстродействия используют ширину полосы пропускания по уровню 0,7(7). Влияние инерционности контура управления на величину ошибок наведения ракеты на цель часто оценивается временем установления гг и эквивалентным временем запаздывания т,. Временем установления (или переходного процесса) называется время, необходимое для того, чтобы абсолютное значение разности между входной величиной и ее конечным значением установилось и оставалось в дальнейшем менее некоторого заданного предела после приложения ступенчатого входного воздействии или возмущения.
Обычно под г„ принято понимать такое время, в течение которого отклонение на выходе достигает 907е установившегося значения. Время запаздывания характеризует отставание выходного отклонения от идеального, которое было бы на выходе идеально безынерционной системы, Для реальной системы оно характеризуется эквявалентным временем запаздывания. Приближенно можно полагать, что т.= (0,5 —:0,7)1„. Всю совокупность составляющих динамической ошибки наведения ракеты на цель в соответствии с причинами их возникновения можно разбить на следующие группы: а) ошибки, обусловленные ограниченными возможностями ракеты по перегрузке; 145 б) ошибки, вызванные погрешностями ввода в команды управления компенсационных поправок на систематическую составляющую динамической ошибки метода наведения, продольное ускорение ракеты и ускорение силы тяжести; в) ошибки переходных процессов, вызванные случайным отклонением ракеты от требуемого положения в момент начала управления, маневром цели, а также другими резкими возмущениями контура наведения.
Ошибка, обусловленная ограниченными возможностями ракеты по перегрузке Маневренность ракеты характеризуется величиной ее располагаемых перегрузок, зависящих для заданной ЗУР от скорости и высоты ее полета. Располагаемые перегрузки определяют минимально возможный радиус кривизны траектории ракеты: уз р »»а» л Если предположить, например, скорость ракеты У„равной 1500 и/с, величину нормальной располагаемой перегрузки ар»,„ 10, то минимальный радиус кривизны траектории р» а» 11,3 км. Кривизна требуемой траектории определяется методом наведения, скоростными характеристиками цели н ракеты, положением точки встречи ракеты с целью относителыю пункта наведения (точки старта ракеты).
Если в заданных условиях полета ракеты к цели ее располагаемые перегрузки станут меньше кинематнческих, то ракета сойдет с требуемой траектории и будет двигаться по дуге окружности радиуса р,~ь,. Возникнет динамическая ошибка, обусловленная ограниченной маневренностью ракеты, которая приведет н возрастанию промаха ЗУР, а при больших ее значениях— непоражеиию цели. Появление динамических ошибок такого рода может происходить прн потере ракетой скорости (на пассивном участке траектории), на больших высотах, а также при обстреле скоростных целей (за пределами возможностей ЗРК по скорости). Влиять на величину такой ошибки стреляющий может лишь выбором положения в пространстве точки встречи ракеты с целью, а также назначением метода наведения, обеспечивающего меньшую кривизну кинематической траектории (при наличии возможностей).
146 Ошибки, вызванные погрешностями ввода в команды управления компенсационных поправок Для исключения систематических составляющих динамической ошибки наведения ракеты на цель команды управления формируются с учетом компенсационных поправок: а) в системах телеуправления: на величину динамической ошибки метода наведения; на ускорение силы тяжести; б) в системах самонаведения: на продольное ускорение ракеты; на ускорение силы тяжести. Кратко рассмотрим физический смысл компенсационных поп авок. омпенсадия динамической ошибки метода наведения н должна осуществляться в соответствии с формулой (2.9), О- ако формирование такой компенсационной поправки йо ряд ду причин (сложность, возрастание случайных составляющих и т.
д.) не всегда целесообразно и возможно. В этих случаях, как указывалось выше, ограничиваются зависимостью (2.10): ~к» Нормальные кинематнческие ускорения ракеты в районе точки встречи в общем случае являются функциями координат цели, нх первых и вторых производных, параметра ракеты х н коэффициента метода т (формула 2.25): аг + (1 — 2т) ( В’„„„— 2г„»„); В’»»,— — — х ((! — т) ~»созе») — Г»~Офц —.созе» » — 2т’-е»Ц„з1п»») + (15’»,„+ 2г»~1» соз ач) (1 — 2т), г де,-2г — г —. у» Р Р у Р При т=0 формулы определяют нормальные ускорения метода трех точек, т=0,5 и т=1 — метода половинного и полного спрямления траектории соответственно. Наибольшую величину в этих уравнениях имеют первые слагаемые, которые определяют величину и структуру компенсационной поправки: й„= — «(1 — т)»» н Ь„а — (! — т) асов»», (4.4) Ко Анализ уравнений (4.4) показывает, что величина компенсационной поправки должна быть различной при наведе- 147 щающее воздействие на контур.
Если в составе команды ие иметь компенсационной поправки, то действие силы тяжести вызовет появление систематической ошибки наведения раке- ты в вертикальной плоскости. Это ц очевидно, так как угол поворота рулей, необходимый для компенса7р ции силы тяжести подъемной аэро- динамической силой, может быть р получен только при наличии пара- метра рассогласования, соответе~ ственно которому формируется / команда управления.
у В системах телеуправ- л е н и я параметром рассогласовае ния является линейное отклонение ракеты от кинематической траектории й. Коэффициент усиления разомкнутого контура управления Ка характеризует связь между нормальным ускорением ракеты )У„ (выходная величина) и параметром рассогласования Й (входная величина): пл Ь =— о а Ошибки переходных процессов П о признаку наведения траектория зенитной управляемой ракеты с момента ее старта до встречи с целью может бы р делена на начальный участок ОА, участок вывода АВ, аз ыть участок наведения В1( (рис. 4.9), Ускорение свободного падения ц может быть разложено на две составляющие: нормальную и касательную к траектории (рис.
4.8). Нормальная составляющая ц соз 0 должна быть компенсирована вводом поправки в команду управления. Ее величина равна Ь, а соа 0 а. а При иксообразном расположении ракеты в полете поправка в команду вводится для обоих каналов управления. В систем ах самонаведения за параметр рассогласования принимается угловая скорость линии ракета— цель (методы пропорционального и параллельного сближения), на величину которой оказывает влияние не только нормальная, но и касательная к траектории составляющая силы тяжести, Влияние последней аналогично продольному ускорению ЗУР. Если плоскость сближения самонаводяацейся ЗУР с целью ие совпадает с вертикальной плоскостью, то компенсационная поправка на силу тяжести ракеты должна вводиться в каналы тангажа и курса.
Величина поправки пропорцооат цып циоиальна — и — соответственно, где у — угол з!г>! ~~с~! крена ракеты. 150 Рис 40 У~асма траектории ракеты Начальный участок — это участок траектории неуправляемого полета ракеты после старта. Существование этого участка обусловлено следующими обстоятельствами: управление ракетой становится достаточно эффективным олко по ко еле достижения ею определенной скорости полета, управление целесообразно осуществлятхч например, после сброса ускорителей и т.
д. Старт ракеты может быть вертикальным или наклонным. Вертикальный или близкий к вертикальному старт обеспечивает быстрый набор высоты и, как следствие, меньшее полетное время до точки встречи при обстреле высотных й. набора высоты ракета по команде с пункта наведения нли по заранее заданной программе может быть повернута на требуемый угол тангажа. В зенитных ракетных ком екредназначенных для поражения целей на малых и мплексредних дальностях, наиболее целесообразен с точки зрения «»,’уменьшения занятости канала наклонный старт ракеты. П и этом значение угла старта ракеты определяется положением ри линии визирования цели в момент пуска ЗУ!» и параметрачи движения цели. В конце неуправляемого полета положение ракеты (точка А) может не соответствовать выбранному методу наведения и положению цели, т. е. ракета может находиться не на кинематической траектории.
Динамическая
ошибка обусловлена изменением дальности
до цели за время съёма, определяемого
как интервал времени от начала облучения
цели до ввода в канал связи информации
о её дальности.
Это
изменение дальности Δrдин
= υr
tc
= υц
tc
cos q,
где υr
— радиальная составляющая скорости
цели;
q—
ракурс цели (угол между направлением
на цель и направлением ее движения); tc
— среднее время съёма. Оно примерно
равно: при визуальном съёме —5 с, при
полуавтоматическом — 2 … 3 с, при
автоматическом — 0с.
При равновероятном
ракурсе цели (р
(q)
= 1/2π) средняя
квадратическая ошибка измерения
дальности
![]()
и
в зависимости от скорости цели может
при визуальном съёме достигать
значений 1 … 2 км и более.
Эффективной
мерой снижения этой ошибки является
использование полуавтоматического и
автоматического съёма координат.
12.3. Ошибки измерения угловых координат и технические решения, обеспечивающие их снижение
12.3.1. Потенциальная ошибка
Потенциальная
ошибка измерения угловой координаты
определяется формой и шириной
диаграммы направленности антенны в
соответствующей плоскости, отношением
сигнал—шум на входе измерителя и
способом измерения координаты.
![]()
где Θ0,5Р
— ширина ДН антенны; к
— коэффициент пропорциональности,
зависящий от формы ДН и способа измерения
Θ.
Числовое значение
коэффициента к
составляет; к
= 0,4 …0,6 — при измерении углового положения
цели методом линейного сканирования
антенного луча (используется при
измерении азимута в обзорных РЛС и угла
места в радиовысотомерах); к
— 0.6…1 — при измерении Θ
методом парциальных диаграмм (в
трёхкоординатных РЛС).
Потенциальная
ошибка может быть значительной, особенно
в РЛС метрового диапазона. Так, например,
при β0,5
Р = 4 0
и γ1
= 13дБ на границе зоны обнаружения
(r
= R)
потенциальная ошибка измерения азимута
составляет σβпот
= 0,4°.
Для
снижения потенциальной ошибки необходимо:
уменьшать
ширину ДН антенны путем увеличения
соответствующего размера антенны или
уменьшения длины волны;
увеличивать
энергию, излучаемую в зону обзора, с
целью увеличения R.
12.3.2. Ошибки измерения угловых координат за счёт особенностей распространения радиоволн
Ошибки за счёт
рефракции. На точность измерения азимута
рефракция радиоволн практически не
влияет, ввиду малости градиента
показателя преломления в азимутальной
плоскости.
При измерении угла
места, ошибки, обусловленные рефракцией,
могут быть значительными. Это связано,
во-первых, с тем, что состояние атмосферы
меняется существенно с изменением
высоты, а, во-вторых, с тем, что в угломестной
плоскости отсутствуют ориентиры,
отражение от которых можно было бы
использовать для коррекции измерений
угла места.
Показатель
преломления n
в тропосфере зависит от температуры,
давления и содержания водяных паров и
определяется соотношением
![]()
где Т
— температура воздуха, К;
р
— барометрическое давление, Па;
l
— парциальное давление водяного пара,
Па.
Параметр Nр
называют индексом рефракции. В диапазоне
100… 10000 МГц индекс рефракции не зависит
от частоты. Поскольку с увеличением
высоты р
и l
уменьшаются, то уменьшается и показатель
рефракции. При нормальных атмосферных
условиях показатель преломления с
увеличением высоты уменьшается со
скоростью 4 • 10 м-1. Его типовое
значение у поверхности земли составляет
n
= 1,0003 (индекс рефракции Np
= 300).
На рис. 12.2
представлена зависимость ошибки
измерения угла места в тропосфере от
высоты для различных углов места и
влажности. Видно, что ошибка существенно
зависит от указанных факторов и
увеличивается с уменьшением углов места
и увеличением влажности.
Классическим
методом учета атмосферной рефракции
в угломестной плоскости является замена
действительного радиуса Земли (Rз
= 6371 км) эквивалентным радиусом при
вычислениях высоты: Rз
экв = кRз,
к = [1 + Rз
(dn/dH)]-1,
где dn/dH —
скорость изменения показателя преломления
с высотой (в общем случае зависит от
высоты).
Для нормальной
атмосферы (стандартная рефракция) dn/dH
= — 4 • 10-8 м-1, к = 4/3 и R3
= 8500 км. При точных измерениях требуется
учёт реальной рефракции. Поправка па
рефракцию при малых ε
составляет Δεрефр
= r(dn/dH)/2.
Рис. 12.2. Ошибка
измерения угла места в тропосфере при
влажности 100% (сплошные линии) и 0%
(пунктирные линии) в зависимости от
высоты и угла места цели.
Для введения
поправки на рефракцию с учетом конкретных
атмосферных условий на РЛС необходимо
иметь специальные приборы, измеряющие
температуру, влажность и давление
окружающей среды, а также таблицы для
определения dn/dH.
При учёте рефракции
ошибка измерения угла места σεРВВ
не превышает 2 …3′.
Ошибки, обусловленные
влиянием земли. Переотражения
радиоволн от подстилающей поверхности
и местных предметов сказываются,
прежде всего, на точность намерения
угловых координат МВЦ. Ошибка измерения
азимута, обусловленная влиянием земли,
для среднепересечённой местности
составляет примерно 1 …2′, а для горной
— 15…20′. Ошибки измерения угла места
особенно велики на малых углах места,
когда значительная часть антенного
луча облучает земную поверхность. Они
могут иметь значение от единиц минут
до единиц градусов [8,12]. Для их снижения
необходимо уменьшать ширину ДН антенны
в угломестной плоскости, уровень первых
боковых лепестков и правильно выбирать
позицию РЛС.
Ошибки, обусловленные
аномалиями в атмосфере. Ошибку
измерения угловой координаты,
обусловленную наличием нерегулярных
неоднородностей (аномалий) в атмосфере,
можно оцепить по формуле
![]()
где σп
— среднее квадратическое значение
коэффициента преломления радиоволн в
неоднородности;
L0
— размер неоднородности;
L
— протяженность трассы с неоднородной
атмосферой.
Эта ошибка может
составлять от 0,5′ (для коротких неоднородных
трасс) до 10…15′ при распространении
радиоволн вдоль границы суши и водной
поверхности.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Наложим на движение ракеты в точке встречи с целью
условие:
![]()
 =0
=0
(3)
Используя уравнение (1), вычислим производную:
![]()
Подставляя условие (3), получим:
![]() , отсюда получаем
, отсюда получаем
(4)
Найдём необходимый коэффициент А(t).
Для этого обобщим условие (4), введя в него постоянный коэффициент ![]() , тогда получим:
, тогда получим:
(5)
При этом значении коэффициента, уравнение метода спрямления
траектории будет иметь вид:
 (6)
(6)
Уравнение (6) — общее уравнение спрямляющих методов.
Если положить m=1, то уравнение
(6) будет представлять собой метод «полного» спрямления. Если m=1/2,
то уравнение (6) будет представлять собой метод «половинного» спрямления. Если m=0, то ![]() , мы получим метод
, мы получим метод
«накрытия цели».
Так как ![]() <0 (расстояние между
<0 (расстояние между
ракетой и целью должно убывать), то по абсолютной величине получаем, что ![]() . Это означает, что упреждение, при
. Это означает, что упреждение, при ![]() , всегда вводится по направлению движения
, всегда вводится по направлению движения
цели.
Сравнение методов
наведения трёхточечного типа.
Сравнительный анализ будем проводить по двум критериям:
1) по величине норм ускорения на кинематической траектории в
районе встречи ракеты и цели, то есть ![]() =0;
=0;
2) по уравнению, определяющему алгоритм работы устройства
выработки команды управления (уравнение сигнала ошибки);
Система телеуправления использует в качестве параметра
рассогласования параметр h.
Рассмотрим метод наведения по первому критерию. ![]() — динамическая ошибка наведения, которая
— динамическая ошибка наведения, которая
имеет место при отсутствии случайных помех и инструментальных ошибок, только за
счёт маневра цели, которая влияет на ![]() .
.
 , где
, где ![]() —
—
коэффициент усиления разомкнутого контура системы телеуправления.
Рассмотрим физический смысл возникновения
динамической ошибки наведения телеуправляемых ракет, использующих в качестве
параметра рассогласования величину ![]() , где r
, где r
— приблизительно заданная функция, определяющая расстояние от станции наведения
до ракеты. Кинематическая траектория ракеты в общем случае является
криволинейной, для движения по криволинейной траектории к ракете в каждый
момент времени должна быть приложена нормальная сила, искривляющая траекторию,
которая для крылатых ракет, в основном, является аэродинамической.

Угол атаки ![]() , используя
, используя
балансировочное соотношение, можно получить следующее соотношение для ![]() :
:
Таким образом, величина управляющей силы искривляющей траектории
пропорциональна углу отклонения рулей ![]() , а
, а
значит и команде управления h.
Для формирования команды управления необходима ошибка h. Таким образом, ракета может двигаться по криволинейной
траектории только при наличии в каждый момент времени её ошибки, относительно
требуемого положения ракеты. Чем больше кривизна кинематической траектории при
заданном коэффициенте усиления разомкнутого контура управления, тем больше
должно быть значение этой ошибки h. Следовательно,
необходимая величина ![]() , обеспечивающая движение по
, обеспечивающая движение по
заданной кинематической траектории, определяется:
1)значением![]() ;
;
2)значением ![]() ,
,
устанавливающего связь между ![]() и h;
и h;
Если бы ![]() обеспечить бесконечно
обеспечить бесконечно
большим (![]() ), а звенья системы управления были бы
), а звенья системы управления были бы
безынерциальными, то при ![]() было бы выработано и
было бы выработано и
выдано на ракету команда, которая способна отклонить рули на требуемый угол ![]() , при этом отклонении рулей возникла бы
, при этом отклонении рулей возникла бы
управляющая сила ![]() и траектория (действительная)
и траектория (действительная)
совпала бы с кинематической. Однако, в действительности, ![]() . При малом отклонении от кинематической
. При малом отклонении от кинематической
траектории будет мала и величина команды, подаваемой на ракету (![]() ) . Соответствующее отклонение рулей не
) . Соответствующее отклонение рулей не
создаёт достаточной нормальной силы, обеспечивающей движение ракеты по
кинематической траектории. Ракета будет отходить от кинематической траектории
до тех пор, пока величина h будет такой, что выдаваемая
на ракету команда, прекратит её дальнейшее отклонение от кинематической
траектории. Таким образом, при криволинейной траектории ракеты, вследствие
того, что команда управления формируется на основе h,
ракета будет двигаться не по кинематической, а по так называемой динамической
траектории, смещённой относительно кинематической в сторону её выпуклости.
Линейное отклонение ![]() между равноудалёнными от пункта
между равноудалёнными от пункта
наведения точек кинематической и динамической траектории и называется динамической
ошибкой наведения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание — внизу страницы.
1.
2. 1. Показатели эффективности стрельбы ЗУР
3.
Стрельба ЗУР — это процесс боевой работы расчета боевой машины (батареи),
направленный на выполнение поставленной огневой задачи.
Стрельба ЗУР начинается с момента постановки огневой задачи батарее (БМ)
на уничтожение цели и заканчивается окончанием оценки результатов
обстрела и состоит из подготовки обстрела, обстрела цели и оценки
результатов обстрела.
Задачи стрельбы
Поражение
одиночной
цели
Уничтожение
возможно большого
числа самолетов
в составе групповой цели
4.
Задачи стрельбы
Уничтожение возможно
большого числа самолетов
в составе групповой цели
Поражение
одиночной цели
Вероятность поражения
одиночной цели
одной ракетой
R1
Математическое ожидание
числа пораженных целей
Mn
ПЭС
Вероятность поражения
одиночной цели
очередью из n-ракет
Rn
ПЭС
5.
Боевой эффективностью ЗРК называется степень соответствия результатов
боя батареи (БМ), поставленной боевой задаче по отражению конкретного
удара средств воздушного нападения (СВН). Боевая эффективность ЗРК
зависит главным образом от временных характеристик комплекса, размеров
зоны поражения, параметров налета и слаженности боевых расчетов.
Задачи стрельбы
Поражение
одиночной
цели
Выполнить
огневую
задачу
Уничтожение
возможно большого
числа самолетов
в составе
групповой цели
6.
Задачи
стрельбы
Поражение
одиночной
цели
Вероятность
поражения
одиночной цели
одной ракетой
R1
ПБЭ
Вероятность
поражения
одиночной цели
очередью из n-ракет
Rn
Выполнить
огневую
задачу
Уничтожение
возможно большого
числа самолетов
в составе
групповой цели
Вероятность
выполнения
огневой задачи
Pог.з.
Математическое
ожидание числа
пораженных целей
Mn
ПБЭ
ПБЭ
7. 2. Модель поражения цели
8.
Модель поражения цели
Наведение
(ЗОН)
9.
Модель поражения цели
Наведение
(ЗОН)
Подрыв
(ЗСРв)
10.
Модель поражения цели
Наведение
(ЗОН)
Подрыв
(ЗСРв)
Ущерб
(КЗПЦ)
11.
Модель поражения цели
Наведение
(ЗОН)
Подрыв
(ЗСРв)
Ущерб
(КЗПЦ)
Поражение
цели
12.
Модель поражения цели
Наведение
(ЗОН)
Подрыв
(ЗСРв)
Ущерб
(КЗПЦ)
Поражение
цели
13.
Для получения выражения вероятности поражения цели одной ракетой введем
прямоугольную систему координат
Y
Vp
P
dy
dx
Vp
Vо т н
y
P
Vц
OH
OC
x
O
X
z
Z
За начало координат (точка О) принимаем центр масс цели.
Ось ОХ направлена вдоль вектора относительной скорости сближения ракеты и цели.
Оси OY и OZ лежат в плоскости, перпендикулярной вектору скорости ракеты, и образуют
так называемую картинную плоскость.
Такая система координат позволяет рассматривать цель как неподвижный объект,
относительно которого ракета движется со скоростью Vотн.
Координаты точек разрыва x,y,z являются случайными величинами. Они характеризуют
ошибки стрельбы. Если разрыв боевой части ракеты произошел в точке с
координатами x,y,z то существует некоторая вероятность поражения цели, зависящая
от координат x,y,z.
14.
Поражение цели ЗУР можно представить в виде сложного случайного события,
состоящего из двух случайных событий, происходящих последовательно:
• разрыв боевой части ракеты в точке с координатами x,y,z относительно цели;
• поражение цели элементами боевой части ракеты при условии разрыва ее в точке с
координатами x,y,z.
Первое случайное событие характеризуется плотностью распределения координат точек
разрыва ракет относительно цели f(x,y,z), которая называется законом ошибок
стрельбы.
Второе случайное событие характеризует вероятность поражения цели в зависимости от
координат точек разрыва боевой части ракеты, т.е. функцией G(x,y,z), которая
называется координатным законом поражения цели.
Вероятность разрыва ракеты в строго определенной точке пространства практически
равна нулю. Поэтому вероятность первого события будем характеризовать вероятностью
разрыва ракеты в элементарном объеме dxdydz около точки x,y,z, т.е. величиной
f(x,y,z)dxdydz.
Вероятность сложного события dR
dR=f(x,y,z)dxdydz G(x,y,z)
В соответствии с законом ошибок стрельбы разрыв боевой части ракеты может
произойти в любой точке пространства относительно цели. Следовательно, для
определения вероятности поражения одиночной цели одной ракетой необходимо
применить формулу полной вероятности, интегрируя по всему объему пространства в
пределах от минус бесконечности до плюс бесконечности:
R1 =
f ( x , y , z ) G ( x , y , z ) dxdydz
15.
Разрыв боевой части ракеты в точке с координатами x,y,z обеспечивается двумя
событиями:
• наведением ракеты в район цели с ошибками, не превышающих допустимые;
• своевременным разрывом боевой части в расчетной точке на данной траектории
•полета ракеты.
Ошибка
наведения
Возникновение ошибки при стрельбе ЗУР
1 – реальные (случайные) траектории; 2 – кинематическая (расчетная) траектория;
3 – расчетная точка разрыва БЧ; 4 – случайные точки разрыва БЧ.
Отклонение ракеты от траектории требуемого движения называется ошибкой наведения
и определяется координатами y,z, а отклонение точки разрыва от расчетной называется
ошибкой срабатывания радиовзрывателя и определяется координатой x для данных
значений ошибок наведения y,z
16.
Таким образом, закон ошибок стрельбы можно представить в следующем виде:
f(x,y,z) = f(y,z) f(x/y,z)
где
f(y,z) – закон ошибок наведения.
f(x/y,z) – закон срабатывания радиовзрывателя.
В свою очередь закон срабатывания радиовзрывателя f(x/y,z) можно представить в виде:
f(x/y, z) = f1 (х/у, z) Р рв(y, z)
где f1(х/y, z) условная плотность распределения координаты х точек срабатывания
радиовзрывателя при заданных ошибках наведения у, z;
Р рв (y, z) условная вероятность срабатывания радиовзрывателя.
Введем понятие условного координатного закона поражения цели, которое имеет вид:
G(y,z) =G(x,y,z) f1(x/y,z) dx
Функция G(y,z) характеризует вероятность поражения цели в зависимости от ошибок
наведения ракеты на цель при условии согласования радиовзрывателя с боевой частью,
которое обеспечивается в ЗРК применением специальных мер. Эти меры ведут к тому,
что реальный разброс координаты x точек подрыва боевой части вдоль траектории
незначителен. Поэтому вероятность поражения цели одной ракетой можно считать
независимой от координаты x точек разрыва боевой части вдоль траектории.
Учитывая это получим:
R1 = f ( y , z ) G ( y , z ) Pрв ( y , z ) dydz
Таким образом получаем алгоритм преобразования трехмерной функции вероятности
поражения одиночной цели одной ракетой, в двумерную функцию:
17.
Вероятность поражения
цели одной ракетой P(x,y,z)
Закон ошибок стрельбы
f(x,y,z)
Координатный закон
поражения цели G(x,y,z)
Закон срабатывания РВ
f(x /y,z)
Условная плотность
распределения координаты
х точек срабатывания f1(x /
y,z)
Закон ошибок наведения
f(y,z)
Условная вероятность
срабатывания РВ
PРВ (y,z)
Условный
координатный закон
поражение цели
G(y,z)
Вероятность поражение
цели одной ракетой P(y,z)
Алгоритм преобразования вероятности поражения цели одной ракетой
18.
Закон ошибок
стрельбы ЗУР
Закон ошибок
стрельбы
Закон
срабатывания
радиовзрывателя
19. 3. Закон ошибок наведения ЗУР
20.
На ракету во время ее полета воздействует большое число факторов. Под
воздействием этих факторов ракета отклоняется от расчетной траектории. Все факторы
действуют одновременно. Поэтому ошибку, характеризуемую их воздействием, называют
суммарной ошибкой наведения.
Суммарная ошибка
наведения
Систематическая
составляющая
m
Случайная
составляющая
σ
Систематической составляющей суммарной ошибки наведения называют такую
ошибку, которая в процессе наведения остается постоянной или изменяется по вполне
определенному закону.
Случайной составляющей суммарной ошибки наведения называют такую
ошибку, которая от измерения к измерению может принять любое неизвестное заранее
по величине и знаку значение.
21.
По источникам возникновения ошибки наведения делятся на:
Суммарная
ошибка
наведения
Динамическая
Флюктуационная
Инструментальная
Личная
Каждый из источников этих ошибок дает систематическую и случайную
составляющие. Исключение составляет флюктуационная ошибка, которая не имеет
систематической составляющей.
Ошибкой наведения ЗУР называется радиус-вектор, проведенный в проекцию точки
разрыва ракеты на картинную плоскость.
Суммарный закон ошибок наведения может выражаться формулой:
f ( y, z) =
1
2ps ys z
.e
2
( z mz ) 2
1 ( y my )
+
2 s y2
s z2
Такую форму закона принято называть суммарным законом ошибок наведения в
главных осях рассеивания.
В ряде случаев, когда σy σz = σ, для упрощения аналитических выражений
переходят к круговому закону.
f ( y, z) =
1
2ps
.e
2
( y m y ) 2 + ( z mz ) 2
2s 2
Такой вид закона принято называть круговым суммарным законом ошибок
наведения.
22.
Y
Y
sy
my
m
s
Р
Y
sz
r
Z
Z
Z
mz
Промахом r называется случайный вектор между целью и проекцией точки разрыва
ракеты (Р) на картинную плоскость. Он характеризуется величиной промаха r и его
ориентацией в картинной плоскости — углом , т.е. проекция точки разрыва в картинной
плоскости может быть определена полярными координатами r и .
От кругового суммарного закона ошибок наведения выраженного перейдем к закону
распределения промахов ракеты (r). Он может быть описан формулой:
f (r) =
r
s2
r2
e 2s
2
Это выражение называется законом Релея.
Для комплекса «Оса-АКМ» при стрельбе по прямолинейно летящей цели среднее
квадратическое отклонение находится в пределах 3-7 метров.
23.
При стрельбе наибольший интерес представляет вычисление вероятности
наведения ракеты в круг заданного радиуса.
Пусть радиус круга, вероятность наведения в который необходимо определить, равен
r0 (называется радиус надежного срабатывания радиовзрывателя). Тогда при
отсутствии систематической составляющей ошибки наведения (m = 0) вероятность
наведения ЗУР в круг радиуса r0 может быть определена по следующей формуле:
r02
2 s2
=
P( r r0 ) 1 e
При наличии систематической составляющей суммарной ошибки наведения
функция плотности распределения промахов будет зависеть и от аргумента m. И
выражение для вероятности наведения в круг заданного радиуса можно выразить
формулой:
rо
P( r r0 ) =
0
r
s2
e
r 2 + m2
2s 2 I
rm
0 2 dr
s
где r – текущее значение промаха;
m – систематическая составляющая ошибки наведения (математическое ожидание
ошибки наведения);
s – среднее квадратическое отклонение случайной составляющей суммарной
ошибки наведения при круговом рассеивании траекторий;
rm
I0 2 – функция Бесселя первого рода нулевого порядка от мнимого аргумента.
s
24.
Интеграл в этом выражения в конечном виде не берется и вычисляется методами
численного интегрирования. Поэтому вероятность наведения ЗУР в круг радиуса r0 при
наличии систематической ошибки наведения определяется на практике с помощью
таблиц или графиков функции
m2
r2
r0
2s 2
2s 2
r
F ( r0* ,m* ) = e
s2 e
0
где
r
m
r0* = 0 ; m * = .
s
s
rm
I 0 2 dr
s
25. 4. Закон срабатывания радиовзрывателя
26.
Под областью срабатывания радиовзрывателя понимается пространственная
область около ракеты, определяемая геометрическим местом условных центров цели в
момент срабатывания РВ.
Закон срабатывания радиовзрывателя f(x/y,z) можно представить в виде:
f(x/y, z) = f1 (х/у, z) Р рв(y, z),
где f1(х/y, z) условная плотность распределения координаты х точек срабатывания
радиовзрывателя при заданных ошибках наведения у, z;
Р рв (y, z) условная вероятность срабатывания радиовзрывателя.
Координаты любой точки пространства могут быть выражены в полярной системе
координат r, , . Поэтому:
f ( / r , q ) = f 1 ( / r , q ) P PB ( r , q ),
где угол срабатывания радиовзрывателя. Он образован продольной осью ракеты
и линией ракета цель в момент срабатывания радиовзрывателя;
r случайное значение промаха в плоскости У р О р Z р ;
q – угол, определяющий ориентацию промаха в плоскости Ур Ор Zр
относительно оси О р Z р.
Yp
r
Dрв
Θ
Θ
Xp
Zp
27.
Конструктивно радиовзрыватели выполнены так, что распределение
срабатывания не зависит от ориентации промаха, т. е. от угла q. Поэтому:
их
углов
f( /r) = f1( /r) Р рв(r)
где f1( /r) условная плотность распределения углов срабатывания радиовзрывателя;
Р рв(r) условная вероятность срабатывания радиовзрывателя или вероятность того, что
радиовзрыватель сработает, если ракета пройдет относительно цели с промахом r.
Таким образом, законом срабатывания радиовзрывателя называется произведение
условной плотности распределения углов срабатывания радиовзрывателя на условную
вероятность его срабатывания.
Рассмотрим условную плотность распределения углов срабатывания РВ.
( m )2
1
f1( / r ) =
exp
2
2 s
2p s
где: m — математическое ожидание углов срабатывания РВ при заданных значениях
промаха r (для РВ 9Э316 по цели типа МИГ-19 m =62о);
s — СКО углов срабатывания при заданных r. (для РВ 9Э316 s =1,5о – 8о).
Угол является случайной величиной, принимающий при каждом пуске определенное
значение под действием большого числа случайных и неслучайных факторов,
важнейшими из которых являются:
— угол наклона ДН приемной антенны;
— случайный характер сигналов, отраженных от цели, обусловленный флуктуацией
сигналов и разнообразием ЭПР различных целей (локация в ближней зоне);
— относительной скорости сближения ракеты с целью;
— случайный характер действия радиопомех на частоте РВ.
28.
Вид функции Р РВ(r) зависит от конструкции радиовзрывателя и от соотношения между
ошибками наведения и максимальными значениями дальности Д РВ max и радиуса r РВ max
срабатывания радиовзрывателя.
Между Д РВ max и r РВ max существует следующая зависимость:
rPB max(min) = DPB max sin(m 3s )
Знак «+» соответствует rРВ max , а знак «-» — rРВ min . Под rРВ max здесь понимают такое
максимальное значение промаха, начиная с которого возможно срабатывание
радиовзрывателя для данного фиксированного значения ДРВmax при заданных m и s
29.
Условная вероятность
срабатывания РВ
зависит от
Величина
промаха
Чувствительность
приемника РВ
факторов
Мощность
передатчика
РВ
ЭОП цели
Флюктуация
отраженного
от цели сигнала
30.
Вероятность срабатывания РВ характеризуется случайной величиной промаха r и
хорошо аппроксимируется зависимостью вида:
( r m r )2
PPB ( r ) = 1 Ф̂
где
s r2
— нормальная функция распределения
Ф̂
m и s — математическое ожидание и дисперсия радиуса срабатывания РВ.
r
r
Обычно для характеристики функции РРВ(r) используют математическое ожидание
радиуса срабатывания радиовзрывателя, равное значению промаха, при котором
РРВ(r) = 0,9. Обозначим его через r0 и будем называть радиусом надежного
срабатывания
радиовзрывателя.
Тогда
реальную
функцию
РРВ(r)
можно
аппроксимировать ступенчатой кривой вида:
1 при r ro
Pрв (r ) =
0 при r > r0 .
Радиолокационный взрыватель 9Э316М-1 ракеты 9М33М3 обеспечивает неконтактный
подрыв БЧ вблизи цели в момент, обеспечивающий наиболее эффективное поражение
цели.
1. Назначение и построение модели. Учитываемые особенности ЗУР СД (БД)
При анализе зарубежных вооружений в условиях неполноты исходных данных, характеризующих облик ракеты, а также на этапе формирования облика отечественных ЗУР необходимо иметь аналитическую модель управляемого движения ракеты, позволяющую, исходя из предполагаемых конструктивных решений и технических характеристик ракеты, оценивать качество наведения ракеты и ее возможности по поражению цели.
К такой модели предъявляются два основных требования: оперативность выполнения больших объемов расчетов при варьировании учитываемых параметров в широком диапазоне, что возможно при аналитическом характере модели, и достаточная детальность описания влияющих факторов, подлежащих анализу, что необходимо для того, чтобы не допустить недооценки возможностей ракеты зарубежной разработки или минимизировать потери, обусловленные необходимостью перепроектирования отечественной ЗУР.
В настоящее время существует большое количество различных аналитических моделей, описывающих построение ЗУР и особенности их движения, в том числе динамику, кинематику и управление полетом ракет, позволяющих анализировать конструкцию ракет и оценивать их возможности. Среди работ, в которых приведено аналитическое описание функционирования систем и отдельных элементов ЗУР, выделяется классическая монография под ред. И.С. Голубева и В.Г. Светлова [1]. Основы динамики и кинематики ракет определяются положениями теоретической механики [2], а их прикладное описание приведено в работах с участием Р.Ф. Аппазова и Л.Н. Лысенко [3][4]. Детальное описание систем управления и методов наведения ЗУР на подвижные цели приведено в монографиях Е.И. Кринецкого и В.Я. Мизрохи [5][6], цифровое моделирование помех, влияющих на работу радиолокационных и оптических ГСН, описано в монографиях В.В. Быкова и С.А. Прохорова [7][8].
Результаты этих и многих других работ позволяют создать аналитическую модель, описывающую управляемое движение ЗУР СД (БД) с необходимой степенью детализации конструкции этих ракет и особенностей используемых в них технических решений.
В настоящей статье представлена аналитическая модель в виде системы дифференциальных уравнений, описывающих динамику управляемого движения ЗУР СД (БД) от начала движения и до встречи с целью, и дополняющих эту систему аналитических зависимостей для описания кинематики и управления ракеты. Параметры модели описывают конструкцию и технические характеристики ракеты и динамически изменяются в процессе построения траектории ракеты в зависимости от особенностей участка и текущих условий полета, определяемых траекторией цели, характеристиками атмосферы и силой притяжения Земли.
Основные конструктивные особенности современных и перспективных ЗУР СД (БД) обусловлены большой дальностью действия и возможностью полета ракеты как в плотных, так и в разреженных слоях атмосферы. Эти особенности отражены в модели за счет учета:
- двух способов наведения – инерциального наведения с радиокоррекцией на большей части траектории и самонаведения по информации ГСН вблизи цели. Применение инерциального наведения ракеты при стрельбе на большие дальности обеспечивает экономию локационного ресурса стрельбовой многофункциональной РЛС (МРЛС) в интересах решения задач обнаружения и сопровождения целей, а самонаведение на заключительном этапе наведения позволяет повысить точность наведения на цель;
- двух способов создания управляющих сил – аэродинамического (управление подъемной силой) в плотных слоях атмосферы и поперечного управления с помощью реактивного ДПУ, размещенного вблизи центра масс – в верхних слоях атмосферы, где аэродинамическое управление неэффективно или невозможно [1, с. 344, 350].
Модель разработана для базовой конструкции ЗУР СД (БД): для определенности принято, что ракета является двухступенчатой, состоит из отделяемого разгонного двигателя и ступени перехвата, в которой размещена система управления и ДПУ. Система управления включает измерительное устройство (ИНС и ГСН) и бортовое вычислительное устройство (БВУ) команд управления.
Такая конструкция ракеты является исходной при конструировании и анализе широкого набора возможных вариантов построения ЗУР СД (БД) с различным количеством ступеней, различными характеристиками двигателей, системы наведения, ГСН, боевой части. Модель несложно модифицировать в зависимости от конкретного варианта исполнения ЗУР, за счет, например, введения дополнительной ступени разгонного двигателя, изменения параметров и технических характеристик отдельных элементов ракеты в рамках приведенного в модели аналитического описания их функционирования.
В модели реализованы следующие особенности построения системы управления полетом ЗУР. Предполагается, что управляющие команды вырабатываются на борту ракеты. При этом измерительным устройством, определяющим относительное положение цели, на большей части траектории является ИНС с коррекцией по данным МРЛС, а на заключительном этапе полета – ГСН. В качестве метода наведения принят МПН с упреждением [6]. Принятый метод наведения используется на протяжении всего полета, от начала управляемого движения и до встречи с целью, – в зависимости от участка полета корректируется лишь коэффициент метода исходя из минимизации ошибки наведения в прогнозируемой точке встречи. (Применение МПН для управления полетом ЗУР СД (БД) и на этапе инерциального наведения с радиокоррекцией и на этапе самонаведения не является новым и реализовано, в частности, в эффективной ЗУР 9М83 [9]).
Также с целью анализа флуктуационных и динамических ошибок наведения в модели учтены случайные флуктуации сигнала цели, а также задержки и ограничения, существующие при выработке управляющих ускорений, характерные для ЗУР СД (БД).
2. Уравнения управляемого движения ЗУР СД (БД)
2.1. Связь динамики, управления и кинематики ЗУР
При описании движения ракета рассматривается как материальная точка (объект, определяемый координатами и массогабаритными характеристиками, без учета вращения). Движение моделируется в инерциальной прямоугольной системе координат (ИСК) Охyz, привязанной к точке стояния МРЛС. Положение ракеты в ИСК в каждый момент времени определяется радиус-вектором
rр = (xр, yр, zр)т, (1)
где хр, yр, zр – координаты ЗУР.
Траектория ЗУР представляет собой временную реализацию положения ракеты при движении к цели rр(t).
Разработанная модель движения ЗУР СД (БД) по содержанию представляет собой совокупность взаимосвязанных уравнений динамики, управления и кинематики ракеты. Динамика ракеты определяется силами, порождающими ее движение. Уравнения динамики описывают ускорения, обусловленные действующими силами. Управление определяет порядок целенаправленного изменения управляющих ускорений для движения ракеты к перехватываемой цели. Кинематика описывает преобразование создаваемых силами ускорений в траекторию ракеты.
В модели принято, что на ЗУР СД (БД) в полете действуют сила тяги разгонного двигателя Pт, аэродинамическая сила R (слагаемая из сил лобового сопротивления Xл и подъемной силы Yп), сила тяги ДПУ Pдпу и сила тяжести Gr (на расстоянии r до центра масс Земли). Векторы ускорений, обусловленных силами, определяются как частное соответствующего вектора силы и текущего значения массы ракеты mр.
Полный вектор ускорения ракеты Wр рассматривается как сумма ортогональных векторов тангенциального (направленного по вектору скорости Vр) и нормального (перпендикулярного вектору Vр) ускорений Wр = Wр.т + Wр.н. Управление полетом ЗУР СД (БД) обеспечивается за счет целенаправленного изменения нормального ускорения Wр.н, тангенциальное ускорение для управления полетом ЗУР СД (БД) не используется. Управляющими силами, в зависимости от участка полета, являются подъемная сила Yп и сила тяги ДПУ Pдпу, управляющими параметрами, соответственно, – угол атаки α и величина тяги ДПУ Рдпу.
Вычисление на основе уравнений динамики вектора ускорения Wр с учетом управления и действия влияющих факторов позволяет построить траекторию ЗУР rр(t) придвижении к цели.
2.2. Уравнения кинематики ЗУР
Уравнения кинематики ЗУР определяют порядок расчета траектории на основе вектора ускорения Wр, создаваемого действующими на ракету силами. Направления действия сил на ЗУР определены относительно ее центра масс следующим образом (см. рис. 1): сила тяги разгонного двигателя Pт направлена вперед по продольной оси ЗУР, сила лобового сопротивления Xл направлена обратно вектору скорости Vр, а подъемная сила Yп – перпендикулярно ему, сила тяги ДПУ Pдпу направлена перпендикулярно продольной оси ЗУР (ступени перехвата), сила тяжести Gr направлена к центру масс Земли.

Рис. 1.Траектория ЗУР (красный цвет) в ИСК Охyz и силы, действующие на ракету
Угол атаки α определен как угол между направлением вектора скорости ракеты Vр и продольной осью ракеты. В модели угол атаки учитывается при аэродинамическом способе управления, поперечное управление осуществляется при обнуленном угле атаки α = 0 (на рисунке 1 направление вектора Pдпу показано до обнуления угла атаки).
Высота полета ракеты определяется как разность
hр = r – Rз,
где Rз – радиус Земли, r – расстояние от центра Земли до ЗУР

Траектория движущейся ЗУР в каждый момент времени определяется радиус-вектором rр (1) и вектором скорости Vр:
 (2)
(2)
где Vрx, Vрy, Vрz – проекции вектора скорости ЗУР на оси ИСК.
Учитывая, что скорость и ускорение связаны зависимостью
 (3)
(3)
последовательное двукратное интегрирование ускорения Wр, обусловленного действием всех сил, при заданных начальных условиях rр0, Vр0 дает параметры траектории ЗУР Vр и rр.
2.3. Уравнения динамики ЗУР
Величины сил, действующих на ЗУР, определяются конструктивными особенностями ракеты и условиями полета, а направления действия сил зависят от текущих параметров траектории rр и Vр. С учетом этого векторы сил рассчитываются следующим образом.
Вектор тяги разгонного двигателя выходит из центра масс ракеты и расположен в плоскости векторов подъемной силы Yп и скорости Vр, образуя с вектором скорости угол атакиα (см. рис. 1). Исходя из этого, направление вектора тяги определяется ортом, являющимся линейной комбинацией ортов векторов подъемной силы и скорости ЗУР:
1Pт = sinα 1Yп + cosα 1Vр, (4)
где 1Yп = Yп / Yп, 1Vр = Vр / Vр – орты подъемной силы и скорости ЗУР, соответственно.
Величина тяги разгонного двигателя определяется реактивной силой истекающих газов по известной формуле [3][4]:
Pт = uṁт, (5)
где u – скорость истечения газов; ṁт = mт / τдв – секундный массовый расход топлива; mт – начальная масса топлива; τдв – продолжительность работы двигателя.
Статическая составляющая тяги на срезе сопла, обусловленная разностью внутреннего давления газов и внешнего атмосферного давления, не учитывается ввиду ее малости посравнению с реактивной составляющей.
В результате вектор тяги разгонного двигателя равен
Pт = 1Pт Pт.
Вектор силы лобового сопротивления равен
Xл = –1Vр Xл.
Величина лобового сопротивления определяется по известной формуле [10]:
Xл =(Cх0 + ηCyαα2)qS, (6)
где q = (ρVр2) / 2 – скоростной напор набегающего потока; ρ – плотность атмосферы в данной точке траектории; Cх0, Cyα, η – аэродинамические коэффициенты [10–12]; S – характерная площадь ракеты, к которой отнесены аэродинамические коэффициенты.
Аэродинамические коэффициенты зависят от различных факторов, характеризующих движение ЗУР. Они задаются как функции числа Маха М = Vр/а, где, а – скорость звука (принимается а = 300 м/с, – усредненное значение для высот использования аэродинамического способа управления ЗУР). Коэффициент Cх0 характеризует лобовое сопротивление при нулевой подъемной силе.
Плотность атмосферы ρ зависит от высоты hр. Изменение плотности воздуха c изменением высоты hр [м] задано таблично в ГОСТ 4401-81 [13], в модели используется аппроксимация
ρ ≈ ρ0е–(0,9hр / hм), (7)
где ρ0 = 1,225 кг/м3 – плотность воздуха на уровне моря; hм = 7 500 м – масштабный коэффициент плотности.
Величина сила тяжести ракеты (тела) массой mр, согласно закону всемирного тяготения, равна
Gr = mр gr,
где gr – величина ускорения силы тяжести на расстоянии r от центра масс Земли,
gr = (g0Rз2) / r2;
g0 – величина ускорения силы тяжести у поверхности Земли.
При малых расстояниях полета ракеты (до 150–200 км по высоте и дальности) величина ускорения силы тяжести может считаться постоянной независимо от текущего положения ракеты и равной g0, а направление вектора ускорения g0 – вертикальным, противоположным направлению оси Oy ИСК. При этом при использовании модели сферической Земли с радиусом Rз = 6371 км погрешность определения вектора g0 не превышает: по величине 4–6 %, по направлению – 1,0–1,8°.
Для ЗУР БД, которые могут совершать полет на бóльшие расстояния и высоты, целесообразно учитывать зависимость вектора силы тяжести от текущих координат ракеты rр. Для определения в ИСК Охyz направления вектора gr cпроецируем точку текущего положения ракеты с координатами (хр, yр, zр) по направлению к центру масс Земли Оз на плоскость Оxz в точку с координатами (хg, 0, zg) (рис. 1). Имеем два подобных прямоугольных треугольника с общей вершиной Оз и катетами одного треугольника Rз, dg и другого: Rз + yр, dр. Из проекции и треугольников орт ускорения силы тяжести ракеты равен

где

В итоге ускорение силы тяжести и сила тяжести ракеты, находящейся в точке rр ИСК, определяются¸ соответственно, по формулам:

Векторы управляющих сил Yп, Pдпу представляют собой подъемную силу и силу тяги ДПУ, соответственно, на участках полета с аэродинамическим и поперечным управлением с помощью ДПУ.
Управляющие силы Yп, Pдпу являются реализацией рассчитанного по принятому методу наведения ракеты потребного управляющего ускорения ракеты Wр.утр. Направления векторов Yп, Pдпу задаются направлением вектора Wр.утр, а величины создаваемых ими ускорений ограничены располагаемыми (конструктивно-определенными) перегрузками:
– для участка траектории с аэродинамическим управлением
Wр.уа = min (Wр.утр, Wарасп),
– для участка траектории с поперечным управлением
Wр.уп = min (Wр.утр, Wпрасп),
где Wр.уа , Wр.уп – величины управляющих ускорений на участках аэродинамического и поперечного управления соответственно; Wарасп, Wпрасп – располагаемые перегрузки на этих участках.
С учетом этого вектор формируемой подъемной силы равен:
 (8)
(8)
а вектор силы тяги ДПУ равен:
 (9)
(9)
где
 – орт потребного управляющего ускорения ЗУР.
– орт потребного управляющего ускорения ЗУР.
Располагаемые перегрузки ЗУР СД (БД) для участка аэродинамического управления Wарасп существенно зависят от скоростного напора, а значит, от высоты и скорости полета. Исходя из пропорциональности подъемной силы плотности воздуха (формула (7)), используется следующий вид функции располагаемых перегрузок Wарасп(Vр, hр):
 (10)
(10)
где коэффициенты k1, k2 зависят от аэродинамических особенностей конструкции ЗУР.
Для участка траектории с поперечным управлением располагаемые перегрузки ЗУР (ее ступени перехвата, оснащенной ДПУ) Wпрасп могут быть определены с учетом особенностей ДПУ. Для жидкостных ДПУ возможно регулирование расхода топлива с созданием на ограниченном интервале времени некоторого конструктивно-определенного максимального управляющего ускорения ДПУ Wпмакс. При этом величина тяги ДПУ в момент t определяется по формуле
Pдпу(t) = uдпу(t)ṁт.дпу(t), (11)
где uдпу(t), ṁт.дпу(t) – соответственно, скорость истечения газов и секундный расход массы топлива ДПУ на управление.
Располагаемые перегрузки ступени перехвата равны
Wпрасп(t) = Pдпу(t) / mп(t), (12)
при этом
Wпрасп(t) ≤ Wпмакс,
где mп(t) – текущая масса ступени перехвата.
Для расчета векторов сил тяги разгонного двигателя (формула (4)) и лобового сопротивления (формула (6)) при полете ЗУР в плотных слоях атмосферы необходимо знать угол атаки α. Подъемная сила ЗУР СД (БД) создается в основном поверхностью корпуса ракеты и описывается известной зависимостью [10–12]
Yп = CyααqS.
Угол α может быть определен из этой зависимости для величины подъемной силы, рассчитываемой из (8).
Для расчета ускорений, обусловленных действием рассмотренных сил, необходимо в каждый момент времени определять текущую массу ракеты mр(t). Масса ЗУР в полете изменяется вследствие выгорания топлива двигателя с последующим его отделением и расхода топлива ДПУ. Для момента времени t масса ЗУР может быть рассчитана по формуле
mр(t) = if (t ≤ τдв, m0 – ṁt, mп(t)),
где m0 – начальная масса ракеты; mп – масса ступени перехвата ракеты; if(А, В, С) – логическая функция, возвращающая значение В, если условие А истинно, или С, если А ложно.
Масса ступени перехвата ракеты при равномерном расходовании топлива определяется соотношением
mп(t) = m0 – ṁт.дпуt, (13)
где mп0 – начальная масса ступени перехвата.
2.4. Уравнения управления полетом ракеты
При движении ЗУР СД (БД) к цели решаются две задачи управления – задача вывода ракеты в точку захвата цели ГСН и задача самонаведения (управления движением ракеты поданным ГСН, сопровождающей цель). В качестве метода наведения при решении обеих задач управления принят МПН PPN. Показано [14], что метод PPN обладает наилучшими характеристиками среди других известных методов пропорциональной навигации.
МПН PPN предписывает для движения ракеты к цели формировать нормальное ускорение, равное
WPPN = Kм Ω × Vр, (14)
где Ω – угловая скорость линии ракета – цель (ЛРЦ); Км – коэффициент метода, Км > 1, может варьироваться в процессе наведения; × – знак векторного произведения.
Угловая скорость ЛРЦ Ω является векторной величиной, получаемой дифференцированием угловых координат ЛРЦ, измеряемых на борту ЗУР измерительным устройством (ИНС или ГСН, в зависимости от этапа полета). В ИСК Oxyz угловая скорость ЛРЦ Ω представляет собой вектор Ω = (Ωx, Ωy, Ωz)т, который рассчитывается по формуле
Ω = (rотн × Vотн) / r2отн, (15)
где rотн, Vотн – векторы относительной дальности и скорости цели (относительно ракеты), соответственно,
rотн = rц – rр, Vотн = Vц – Vр, (16)
rотн = |rотн| – относительная дальность цели;
rц = (xц, yц, zц)т, Vц = (Vцx, Vцy, Vцz)т – радиус-вектор цели и вектор скорости цели в ИСК соответственно.
Кинематику формирования вектора угловой скорости ЛРЦ Ω в ИСК Oxyz поясняет рисунок 2. Для наглядности введен вектор относительной скорости сближения:
Vсбл = –Vотн.

Рис. 2.Траектории ракеты (красная) и цели (синяя). К расчету вектора угловой скорости ЛРЦ
В разработанной модели описанный метод МПН PPN модифицирован за счет введения в вырабатываемое управляющее ускорение поправок ΔW для компенсации действия на управление сил тяжести, тяги разгонного двигателя и ускорения цели – реализовано так называемое упреждение действия на управление перечисленных факторов [6]. За счет этого существенно повышается качество наведения ЗУР (промах снижается на порядок и более в зависимости от особенностей траектории). Потребное управляющее ускорение вырабатывается как сумма:
Wр.утр = WPPN + ΔW.
Выработка управляющего ускорения в соответствии с методом PPN с упреждением при достаточной скорости ракеты гарантирует попадание ракеты в цель. Однако на систему управления ракеты действует ряд факторов, приводящих к промаху. В модели учтены основные факторы, определяющие ошибки наведения ракеты – шумы и задержки при измерении угловой скорости ЛРЦ Ω, ограничение угловой скорости перемещения луча ГСН при сопровождении цели, а также задержки и ограничения в исполнительных устройствах (рулевых машинках и ДПУ) при формировании управляющего ускорения Wр.у = {Wр.уа , Wр.уп }.
Наличие шумов ГСН приводит к возникновению флуктуационных ошибок наведения, а задержки и ограничения при создании управляющего ускорения определяют динамические ошибки наведения.
3. Показатели качества наведения и оценки возможностей ЗУР
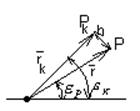
Основным показателем качества наведения ЗУР на цель является мгновенный (текущий) промах. Мгновенный промах h представляет собой проекцию вектора относительной дальности rотн на плоскость, перпендикулярную вектору Vсбл (рис. 3).

Рис. 3. Определение мгновенного промаха
Мгновенный промах определяется как разность векторов:
h = rотн – τп Vсбл, (17)
где τп – время полета, оставшееся до встречи ракеты с целью при их дальнейшем равномерном и прямолинейном движении.
Время полета τп рассчитывается по формуле [14]:

Мгновенный промах, как векторная величина, характеризуется величиной промаха h и фазой промаха φh (углом между векторами rотн и Vсбл).
Исходя из свойств скалярного и векторного произведений векторов rотн и Vсбл, фаза промаха может быть рассчитана, соответственно, по формулам:

а величина промаха – по формулам:
 (18)
(18)
Из (18) и (15) следует, что мгновенный промах равен нулю в случае, если Ω = 0 (векторы Vсбл и rотн сонаправлены, при наведении ракеты реализуется метод параллельного сближения).
Возможности ЗУР по поражению цели могут оценивать на основе сопоставления величины промаха в точке встречи с размерами цели. В качестве критерия возможности кинетического поражения, например баллистической ракеты, может быть величина промаха, не превышающая трети поперечного размера (диаметра) цели: h < dц/3. При получении по результатам моделирования бóльших значений промаха необходимо моделировать нагрузку ракеты боевой частью (что влечет увеличение массогабаритных характеристик ЗУР), и оценивать возможность поражения цели по результатам сопоставления поражающего действия боевой части с характеристиками уязвимости цели в зависимости от промаха.
Скоростные возможности ЗУР оцениваются средней скоростью полета ракеты в течение заданного времени Тп (время полета к цели):

и характеристической (потенциальной) скоростью
 (19)
(19)
Маневренные возможности ракеты характеризуются величиной нормальных ускорений при управляемом движении к цели: Wр.н = |Wр.н|.
Для оценки ресурсов ЗУР, затрачиваемых на управление, используются показатель характеристической управляющей скорости [14], рассчитываемый по формуле:
 (20)
(20)
где интервал интегрирования [tн, tк] определяется оцениваемым участком траектории (этап аэродинамического или поперечного управления).
При аэродинамическом способе управления показатель Vхар.у характеризует степень снижения скорости ракеты из-за потерь, связанных с созданием требуемой подъемной силы. При поперечном управлении полетом с помощью ДПУ показатель Vхар.у определяет потребный запас топлива ДПУ – величина Vхар.у не должна превышать максимального значения Vхаогрр.у, рассчитываемого с учетом (12) при расходовании всего топлива ДПУ.
4. Структурная схема модели
Разработанная модель движения ЗУР СД (БД) включает модель цели МС, исходные данные RD, XL, YP, DPU по конструкции ЗУР (для расчета, соответственно, тяги разгонного двигателя, лобового сопротивления, подъемной силы и тяги ДПУ), исходные данные для расчета массы ракеты mр, модель Земли MZ и приведенные выше уравнения движения ЗУР (динамики, управления и кинематики). Уравнения движения ЗУР описывают основные физические явления, определяющие движение, а также функционирование основных элементов и устройств ракеты.
Структурная схема модели, определяющая состав и взаимосвязи элементов модели, приведена на рисунке 4.

Рис. 4. Структурная схема модели управляемого движения ЗУР
Модель Земли MZ для ЗУР принята сферическая, с радиусом Rз = 6371 км, с равномерным распределением массы и величиной ускорения силы тяжести у поверхности g0 = 9,81 м/с2. Для цели, ввиду отсутствия необходимости детального моделирования ее полета, используется модель плоскопараллельного гравитационного поля Земли с ускорением силы тяжести, равным
gr = (0, gr, 0)т.
Модель цели MС. Как вариант моделируется движение маневрирующей баллистической цели на конечном участке полета. Система дифференциальных уравнений, описывающих движение цели, имеет вид:

где Wцм – вектор ускорений маневра цели; Xл.ц – лобовое сопротивление; mц – масса цели.
Интегрирование данной системы по времени при заданных начальных траекторных параметрах rц0, Vц0, известном ускорении Wцм(t) и лобовом сопротивления (рассчитываемом в зависимости от текущих траекторных параметров и конструктивных характеристик цели) дает траекторные параметры цели rц (t), Vц (t), необходимые для моделирования наведения на нее ЗУР. Отражательные характеристики цели учтены косвенно в дальности начала работы ГСН и уровне шумов ГСН η (блок 3).
В блоке 1 в динамике моделирования по формулам (16) определяются относительные параметры движения цели rотн, Vотн. На их основе по формуле (17) вычисляется текущий промах h и угловая скорость ЛРЦ Ω (формула (15)).
В блоке 2 описываются процессы функционирования конкретных физических устройств ЗУР, обеспечивающих формирование управляющего ускорения (тракт формирования управляющего ускорения).
В блоке 3 моделируется измерение вектора угловой скорости ЛРЦ Ω. Измерительным устройством на этапе инерциального наведения является ИНС, на этапе самонаведения – ГСН. Измерительное устройство определяет относительные угловые координаты цели. К измеряемым угловым координатам добавляется шумовой процесс η, имитирующий флуктуации сигнала, внутренние шумы и помехи. Компоненты вектора Ω получаются дифференцированием зашумленных угловых координат. В модели физические процессы получения вектора Ω замещены его расчетом по формуле (15) и суммированием с продифференцированным процессом η (см. ниже, п. 5.1).
Фильтр Ф1 с постоянной времени ТФ1 учитывает аппаратную задержку обработки сигнала (см. ниже, п. 5.2). Кроме того, осуществляется фильтрация угловой скорости ЛРЦ с целью снижения шумовой составляющей сигнала. При этом параметр ТФ1 фильтра выбирается исходя из обеспечения компромисса между динамическими и флуктуационными ошибками наведения (см. [1, с. 431, 435]). Значение параметра ТФ1 в процессе полета ракеты может меняться – при малом значении мгновенного промаха величина Ω близка к нулю, шумы превалируют над сигналом, постоянную времени фильтра необходимо увеличивать, и, наоборот, при больших значениях промаха необходимо снижать постоянную времени фильтра, что увеличивает скорость отработки промаха.
В блоке 3 также учитывается ограничение Ωогр величины измеряемой угловой скорости ЛРЦ Ω, обусловленное конечным быстродействием измерительного устройства (см. ниже, п. 5.3).
Для формирования компенсационной поправки к управляющему ускорению моделируется измерение ускорения цели Wцизм с учетом задержки (фильтр Ф3) и флуктуационных ошибок измерения (аддитивный случайный процесс ζ). Аналогичным образом может моделироваться измерение в ИНС вектора скорости ракеты Vризм (на схеме не показано).
Выходом блока 3 является зашумленный помехой, отфильтрованный фильтром Ф1 и ограниченный вектор угловой скорости ЛРЦ Ω, а также измеренные векторы ускорения и скорости цели.
В блоке 4 в БВУ на основе полученного вектора Ω по МПН PPN вычисляется потребное управляющее ускорение WPPN (формула (14)). Для расчета используется измеренное ИНС значение вектора скорости ракеты Vризм. Коэффициент метода Км изменяется по заданной программе в зависимости от этапа полета. Для компенсации негативного влияния на управление сил тяжести, тяги двигателя и ускорения цели вычисляются и добавляются поправки ΔW (см. ниже, п. 5.4). Рассчитанное с учетом компенсационных поправок требуемое управляющее ускорение значение Wр.утр в виде команд управления поступает в исполнительное устройство.
В блоке 5 исполнительное устройство (рулевые машинки или ДПУ, в зависимости от участка полета) формирует управляющие ускорения (формулы (8), (9)). Учитывается инерционность исполнительного устройства (фильтр Ф2 с постоянной времени ТФ2) и ограничение на значения формируемых управляющих ускорений по величине Wрасп(формулы (10), (12)) и запасу топлива (для ДПУ) Vхаогрр.у.
В результате на выходе блока 2 формируется вектор управляющего ускорения для участка полета с аэродинамическим или поперечным управлением Wр.у = 1 / mр (Yп, Pдпу), вычисленный по методу PPN с упреждением, с учетом действующих шумов и помех, задержек и ограничений. Переключение способов создания управляющих сил (с аэродинамического на поперечное управление) осуществляется по программе начала работы ДПУ.
Порядок учета помех, задержек и ограничений и расчета компенсационных добавок к управляющему ускорению описан в п. 5.
В блоках 6, 7, 8 вычисляются по приведенным выше формулам (см. п. 2.3) действующие на ЗУР в текущей точке траектории, соответственно, сила тяжести, тяга разгонного двигателя и лобовое сопротивление и обусловленные ими ускорения.
Суммированием векторов ускорений определяется полное ускорение ЗУР Wр.
Дальнейшее последовательное двойное интегрирование вектора Wр (см. уравнения кинематики (2, 3)) при известных начальных условиях rр0, Vр0 дает вектор скорости ракеты Vр и ее положение rр в ИСК Oxyz. Рассчитанные векторы Vр и rр используются на следующем шаге вычислений (с временным интервалом Δt) в блоках модели в соответствии со структурной схемой модели. Таким образом, контур моделирования управляемого движения ракеты замыкается, модель позволяет построить траекторию управляемого движения ЗУР rр (t).
5. Учет факторов, определяющих флуктуационные и динамические ошибки наведения
5.1. Моделирование шумов при изменении угловой скорости линии ракета – цель
Оценки угловых координат цели, получаемых измерительным устройством, флуктуируют вследствие как внутренних шумов приемного устройства измерителя, так и внешних причин – флуктуаций отраженного от цели сигнала, обусловленных случайным блужданием его энергетического центра по поверхности цели, условиями распространения волн и различного рода помехами, в том числе уводящими по углу.
Полагаем, что измерительное устройство, сопровождая цель, измеряет углы между ЛРЦ (радиус-вектором rотн) и осями ИСК Oxyz1. Представим флуктуации измеряемых угловых координат цели в виде вектора η = (ηx, ηy, ηz)т, компонентами которого являются стационарные случайные процессы (ССП), аддитивные к оценкам соответствующих координат.
При получении компонент вектора угловой скорости ЛРЦ Ω путем дифференцирования угловых координат цели ССП ηх, ηy, ηz также дифференцируются. При этом образуются новые ССП ξх, ξy, ξz, с характеристиками, отличными от характеристик исходных ССП. Векторный ССП ξ = (ξх, ξy, ξz)т суммируется с вектором Ω, рассчитываемым по формуле (15).
Так как моделирование управляемого движения ЗУР основывается на дискретном интегрировании уравнений движения (с интервалом Δt), для каждого i-го момента времени необходимо иметь реализацию каждой компоненты вектора ξ. Обозначим ξi реализацию одной из компонент вектора ξ в i-й момент времени. Значения ССП ξi определяются последующей методике.
В качестве исходной известной характеристики входного ССП η используется его автокорреляционная функция (АКФ) Кη(τ) с параметрами: дисперсией Dη = ση2 = Кη(0) и интервалом корреляции
 ,
,
где kη(τ) = Кη(τ) / Dη – нормированная АКФ.
Для определенности принимается, что шумы измерения угловых координат цели характеризуются экспоненциальной АКФ вида
Кη(τ) = Dη(1 + ω|τ|)e–ω|τ|, (21)
в общем случае с разными параметрами Dη и α для каждой координаты.
АКФ вида (21) принято использовать при описании случайных возмущений в следящих системах и информационно-измерительных устройствах [7]. ССП η с данной АКФ имеет дисперсию Dη, нормированную АКФ kη(τ) = (1 + ω|τ|)e–ω|τ| и интервал корреляции τк.η = 2 / ω.
В корреляционной теории случайных процессов показано [8], что АКФ процесса ξ на выходе дифференцирующего устройства Кξ(τ) определяется как вторая производная отфункции Кη(τ), взятая со знаком минус:
Кξ(τ) = –(Кη(τ))».
Дифференцирование функции (21) дает АКФ выходного процесса ξ [15]:
Кξ(τ) = –(Кη(τ))» = ω2Dη(1 – ω|τ|)e–ω|τ|, (22)
Дисперсия выходного процесса ξ равна Dξ = ω2Dη, нормированная АКФ имеет вид kξ(τ) = (1 – ω|τ|)e–ω|τ| , интервал корреляции равен τк.ξ = 2 / (ωe). То есть дифференцирование ССП с АКФ вида (21) порождает новый ССП с корреляционными характеристиками, отличными от характеристик входного процесса, – интервал корреляции уменьшается в е раз, а дисперсия увеличивается (при ω > 1 с–1) в ω2 раз. Изменение свойств случайного процесса при его дифференцировании является следствием того, что дифференцирующее устройство представляет собой фильтр верхних частот. Ослабление низких частот приводит к уменьшению интервала корреляции процесса.
Для получения значений ССП ξi на выходе дифференцирующего устройства вначале сформируем дискретный входной процесс η. В теории моделирования случайных процессов [7][8] получен алгоритм цифрового моделирования ССП с АКФ вида (21). Согласно ему, n значений ССП ηi, имеющего среднеквадратичное отклонение ση = √Dη, рассчитываются с временным интервалом Δt с использованием шума ψ, подчиняющегося стандартному нормальному распределению N(0,1), по следующей рекуррентной процедуре:
η0 = a0σηψ0,
η1 = a0σηψ1 + a1σηψ0 + b1η0,
ηi = a0σηψi + a1σηψi-1 + b1ηi-1 + b2ηi-2, i = 2…n,
где параметры процедуры определяются по формулам:

α0 = ρ3(1 + γ) – ρ(1 – γ), α1 = 1 – 4ρ2γ – ρ4,
γ = ωΔt, ρ = e–γ.
Получив значения ηi входного случайного процесса, значения случайного процесса ξi на выходе дифференцирующего устройства могут быть рассчитаны по формуле
ξi = (ηi – ηi – 1) / Δt.
При этом значение интервала Δt < τк.ξ необходимо выбирать на основании теоремы Котельникова с учетом известного вида АКФ (22).
Привязка полученных цифровых значений процесса ξi к временной шкале при дискретном интегрировании уравнений движения выполняется по формуле
ξ(t) = ξtrunc(t / Δt),
где trunc(х) – операция отсечения дробной части числа х.
Приведенная методика расчета шума ξ на выходе дифференцирующего устройства позволяет при известных параметрах ση и τк.η ССП η с АКФ вида (21), аддитивного к измеряемой угловой координате цели, получить временные реализации шумового процесса, накладывающегося на измерения соответствующей компоненты вектора угловой скорости ЛРЦ Ω.
Одна из реализаций моделирования случайных процессов на входе и выходе дифференцирующего устройства для случая, когда входной процесс характеризуется АКФ вида (21), приведен на рисунке 5. Здесь же приведены теоретические и статистические нормированные АКФ процессов. Расчет статистических дисперсии и АКФ случайного процесса y(t) по результатам моделирования выполнялся, соответственно, по формулам:


Применительно к схеме модели управляемого полета (рис. 4) приведенный на рисунке 5 входной ССП η(t) моделирует флуктуации измеряемой относительной угловой координаты цели, а выходной ССП ξ(t) – флуктуации скорости изменения этой угловой координаты.
Необходимо учесть, что в полете интенсивность шумов может изменяться. Так, на этапе сопровождения цели ГСН, по мере приближения ЗУР к цели, отношение сигнал/шум растет. Вследствие действия системы автоматической регулировки усиления в приемном устройстве, при активной локации цели, интенсивность шумов снижается обратно пропорционально квадрату расстояния до цели rотн [16]. В этом случае рассчитанные по приведенной выше методике значения ССП η(t) необходимо умножать на отношениеr02/rотн2, где rотн.0 – опорная дальность, в качестве которой принимается дальность захвата ГСН цели на автосопровождение.
ССП ζ, описывающий шумы измерения ускорения цели Wцизм (блок 3 структурной схема модели), моделируется аналогично моделированию процесса η.
5.2. Учет задержек в тракте формирования управляющего ускорения
В тракте формирования управляющего ускорения существуют задержки измерения ГСН угловой скорости ЛРЦ Ω, формирования управляющего ускорения в исполнительных устройствах управления Wр.у, а также измерения ускорения цели Wцизм. Задержки связаны как с инерционностью соответствующих устройств и алгоритмов, так и с необходимостью фильтрации помех. Моделирование задержек выполнено с использованием теории автоматического управления, включением в цепь формирования векторов Ω,Wр.у, Wцизм фильтров Ф1, Ф2, Ф3 соответственно. Принято, что каждый фильтр представляет собой инерционное звено с постоянной времени, соответственно, ТФ1, ТФ2 и ТФ3.
Инерционное звено с постоянной времени ТФ в общем случае описывается дифференциальным уравнением:
ẏ(t) = (kx(t) – y(t)) / TФ, (23)
где x(t) – входная величина звена, у(t) – его выходная величина, k – коэффициент усиления звена.
Для описания задержек могут использоваться и другие типы динамических звеньев, однако для решаемой задачи анализа возможностей ЗУР в условиях неполноты исходных данных достаточно учесть инерционность работы описанных устройств. Параметр ТФ инерционного звена имеет простой физический смысл, позволяющий определять его значение исходя из самых общих сведений о моделируемом процессе. Так, применительно к измерению производных относительных угловых координат цели величина ТФ1 характеризует предельную задержку измерения самих угловых координат2.
Исходя из (23), уравнение фильтрации фильтром Ф1 зашумленной угловой скорости ЛРЦ Ω имеет вид:

Для исполнительного устройства управления уравнение фильтрации фильтром Ф2 управляющего ускорения имеет вид:

Для алгоритма вычисления ускорения цели уравнение фильтрации имеет вид:

Векторы Ω, Wр.у, Wцизм на выходе соответствующих фильтров вычисляются интегрированием приведенных выше уравнений при заданных начальных условиях.
Отметим, что совокупность фильтров Ф1, Ф2, Ф3 в тракте формирования управляющего ускорения в совокупности образуют сложное динамическое звено колебательного типа.
5.3. Учет ограничений в тракте формирования управляющего ускорения
В модели учитывается ограничение угловой скорости ЛРЦ Ω и ограничение величины формируемого управляющего ускорения Wр.у. Логика ограничения вектора Ω следующая: при быстром относительном угловом перемещении цели происходит срыв сопровождения цели, при этом вектор Ω на выходе ГСН фиксируется (используется гипотеза линейного увеличения относительных угловых координат цели). При снижении угловой скорости цели её сопровождение возобновляется, при этом возобновляется вычисление вектора Ω по формуле (15). Формальная запись описанной логики:
Ω = if(|Ω| ≥ Ωогр, Ωср, Ω),
где Ωогр – ограничение на величину вектора Ω; Ωср – вектор Ω на момент срыва сопровождения.
Ограничение величины формируемого управляющего ускорения Wр.у располагаемыми перегрузками задается следующей логической функцией:

5.4. Расчет компенсационных поправок к управляющему ускорению метода наведения
Формулы МПН (14), (15), определяющие потребное нормальное ускорение WPPN для движения ракеты к цели, не учитывают движение цели. Также в них нет непосредственного учета действия силы тяжести Gr и тяги разгонного двигателя Pт, которые, будучи приложены к объекту управления, влияют на реализацию вырабатываемого управляющего ускорения WPPN. В процессе движения ракеты негативное действие указанных факторов по мере приближения к цели будет отработано, однако оно приводит к возрастанию нормальных ускорений и повышению затрат ресурсов ракеты (увеличению значений характеристической управляющей скорости). Упредить негативное действие перечисленных факторов можно, измерив ускорения, вызываемые ими, сформировав и добавив соответствующие компенсационные поправки ΔWнG, ΔWнP, ΔWнц к ускорению WPPN. В итоге потребное управляющее ускорение, вырабатываемое в вычислительном устройстве (блок 4 схемы рисунка 4) по методу PPN с учетом поправок, равно
Wр.утр = WPPN + ΔWнG + ΔWнP + ΔWнц.
Компенсационные поправки рассчитываются следующим образом.
Компенсационная поправка на силу тяжести
Ускорение силы тяжести gr, действующей на ракету, раскладывается по векторам WPPN и Vр на нормальную grн и тангенциальную grт составляющие (см. рис. 6).

Рис. 6. Разложение ускорения силы тяжести
Тангенциальная составляющая grт оказывает на ракету тормозящее или ускоряющее действие (в зависимости от направления вектора Vр), а нормальная составляющая grн, суммируясь с вырабатываемым управлением WPPN, искажает его. С учетом того, что вектор grн направлен всегда в нижнюю полусферу ИСК в текущей точке нахождения ракеты, компенсационная поправка на действие на управление силы тяжести равна
ΔWнG = – grн.
Проекция модуля вектора gr на вектор WPPN (из свойств скалярного произведения векторов) равна

а вектор grн определяется как произведение величины grн на орт 1WPPN = WPPN / WPPN:

Для модели плоскопараллельного гравитационного поля Земли формула упрощается:

где WPPN, y – компонента вектора WPPN по оси Oy ИСК.
Компенсационная поправка на тягу разгонного двигателя
Компенсационная поправка к вектору WPPN на силу тяги разгонного двигателя в соответствии с разложением (4) равна

Компенсационная поправка на ускорение цели
Компенсационная поправка на ускорение цели равна проекции ускорения цели Wц на вектор ускорения WPPN. Расчет поправки аналогичен расчету для силы тяжести:

Силы тяжести и тяги разгонного двигателя детерминированы, векторы этих сил Gr, Pт могут быть оценены на борту ЗУР с высокой точностью и с малыми задержками. Оценка вектора ускорения цели Wц является сравнительно сложной задачей, решаемой по результатам траекторных измерений в наземной РЛС или на борту ЗУР в условиях недостаточности информации и наличия помех измерениям. В модели при вычислении поправки ΔWнц вектор Wц заменяется на его оценку Wцизм («образ» цели), получаемую из вектора Wц с некоторой задержкой, задаваемой параметром ТФ3 фильтра Ф3 и зашумленную помехой ζ. Тем самым имитируется работа алгоритма вычисления ускорения цели Wц вчасти учета его влияния на флуктуационные и динамические ошибки наведения.
6. Пример применения модели. Оценка возможностей ракеты типа THAAD
Проанализируем работоспособность модели на примере оценки возможностей ЗУР в условиях неполноты исходных данных. В качестве исследуемой ЗУР выберем ракету комплекса THAAD (США). Полные достоверные исходные данные по ракете, необходимые для моделирования, отсутствуют. Из презентаций на различных военно-технических выставках и материалов сайтов компании-разработчика (Lockheed Martin) и министерства обороны США известны общие сведения о конструкции и характеристиках ракеты. В связи с этим обобщим известные исходные данные и доопределим неизвестные. Для неизвестных параметров определим их технически реализуемые значения, использование которых не позволит недооценить возможности ракеты. Синтезированные таким образом данные будут описывать некую ракету типа THAAD с предельно достижимыми характеристиками в данном конструктивном облике.
Общие сведения о ракете
Согласно открытым источникам, ракета THAAD предназначена для кинетического перехвата баллистических целей (БЦ) – баллистических ракет и их головных частей. Границы зоны поражения составляют: по дальности – 200 км, по высоте – от 40 до 150 км, максимальная скорость полета ракеты THAAD составляет ~ 2800 м/с. Дальность пуска БЦ, для перехвата которых может использоваться ракета THAAD, – до 3500 км.
Конструктивно ракета состоит из разгонного двигателя, промежуточного отсека и отделяемого кинетического перехватчика (управляемой головной части – УГЧ) – см. рисунок 7.

Рис. 7. Ракета комплекса THAAD. Габаритные размеры ракеты и вид УГЧ в разрезе (выставочный образец)
Твердотопливный разгонный двигатель обеспечивает старт, разгон и быстрый набор высоты с последующим полетом ракеты по заданной траектории. Управление полетом ракеты на активном участке траектории (АУТ) осуществляется с помощью поворотного сопла двигателя. Стабилизация ракеты при полете в атмосфере осуществляется за счет подвижных аэродинамических плоскостей-сегментов, расположенных в хвостовой части ракеты в виде конуса. Промежуточный отсек обеспечивает отделение УГЧ от разгонного двигателя.
УГЧ имеет жидкостной ДПУ, обеспечивающий стабилизацию и управление полетом, бортовую аппаратуру управления с ИНС, и инфракрасную ГСН. Сигнал от цели поступает в ГСН через сапфировое неохлаждаемое окно после сброса обтекателя, защищающего ГСН от нагрева при полете в плотных слоях атмосферы.
Запуск и полет ракеты до начала работы ГСН осуществляются на основе информации о цели, получаемой от РЛС AN/TPY-2 из состава комплекса THAAD. РЛС обнаруживает и сопровождает перехватываемую цель, обеспечивает выработку исходных данных для запуска ракеты, сопровождает ракету в полете, передает на нее команды радиокоррекции. Бортовая система управления с ИНС вырабатывает команды управления полетом, реализуемые на АУТ за счет подъемной силы, создаваемой корпусом ракеты, а после отделения УГЧ – за счет поперечной тяги, создаваемой ДПУ. После сброса обтекателя на расстоянии, позволяющем обнаружить цель, включается ГСН, которая выполняет поиск, захват и сопровождение цели. На основе информации ГСН осуществляется самонаведение УГЧ на цель с помощью ДПУ и ее поражение путем прямого попадания. Более подробно состав и порядок функционирования ракеты описаны в [17].
Определим исходные данные для моделирования управляемого движения ракеты и оценки ее возможностей.
Выберем следующие параметры цели. Цель движется по баллистической траектории в ее терминальной части, в вертикальной плоскости, параллельной оси Ох ИСК, с параметром 25 км (проекция плоскости движения на ось Оz). Начальные координаты цели: rц0 = (630, 250, 25)т км, дальность |rц0| = 678,3 км, угол тангажа – 5°, скорость Vц0 = –3800 м/с. Приведенные начальные параметры траектории цели при одновременном запуске по ней ракеты, с учетом средней скорости полета ракеты Vр.ср = 2000–2100 м/с, позволяют оценить возможность перехвата цели в одной из характерных точек зоны поражения комплекса THAAD на дальности ~200 км, высоте ~150 км, с параметром 25 км. Время полета ракеты в точку встречи при этом составит примерно tТ.В = 120 с (это время определяет временной диапазон моделирования). Последовательное варьирование начальных координат rц0 с меньшими значениями дальности |rц0| позволяет оценить возможности ракеты по перехвату цели в различных точках расчетной зоны поражения.
Примем, что цель перед встречей с УГЧ может выполнить маневр в горизонтальной плоскости (по оси Оz) определенной продолжительности τц.м, с ускорением gц.м различной интенсивности (такой подход к оценке динамических ошибок наведения ракеты используется, в частности, в статье П. Зарчана [18], посвященной вопросам оценки возможности перехвата баллистических целей).
Массогабаритные характеристики цели примем следующими: mц = 500 кг, dц = 0,6 м, аэродинамические коэффициенты – согласно [19].
Определим параметры моделируемой ЗУР. Углы старта в ИСК Охyz: тангаж – 70°, азимут – 0° (ракета стартует по направлению строительной оси пусковой установки (ПУ), положение которой изначально зафиксировано в ракетоопасном направлении). Начальную скорость ракеты (на высоте 20 м от ПУ) примем равной Vр0 = 20 м/с.
Массогабаритные характеристики ЗУР и характеристики разгонного двигателя: m0 = 900 кг, dр = 0,37 м, mт = 635 кг, τдв = 20 с, u = 2700 м/с, значение тяги разгонного двигателя, рассчитанное по (5), равно Pт = 85,7 кН. Характеристическая скорость ракеты, рассчитанная по (19), составляет Vхар.р = 3301 м/с. Аэродинамические коэффициенты ЗУР – на основе материалов [12][19].
Характеристики УГЧ и ДПУ. Начальная масса УГЧ mп0 = 90 кг. На основе анализа состава оборудования УГЧ принимаем, что масса топлива, расходуемого на управление mт.дпу, = 30 кг. Учитывая прогресс зарубежных технологий в создании ракетных двигателей [1], будем считать, что ДПУ обеспечивает управление движением УГЧ в течение всего времени полета на дальнюю границу зоны поражения. Время работы ДПУ в этом случае составляет τдпу = 100 с. Скорость истечения газов принимаем равной uдпу = 3200 м/с. Средняя тяга ДПУ, рассчитанная по (11), равна PДПУ = 960 Н. Располагаемые перегрузки УГЧ Wграсп при равномерной выработке топлива ДПУ в течение τдпу = 100 с возрастают с 1,2 до 1,6 g0 (расчет по (12) с учетом (13)). Характеристическая управляющая скорость ДПУ, достигаемая при расходовании всего запаса топлива (формула (20)), составляет Vхаогрр.у = 1297 м/с.
Параметры тракта формирования управляющего ускорения определим для характерных участков траектории на временной шкале t ∈ [0, tТ.В] от момента старта ЗУР и до момента встречи с целью:
- участок Т1, t ∈ [0, τдв] – период работы разгонного двигателя. Осуществляется аэродинамическое управление полетом за счет изменения вектора подъемной силы. Управляющие команды вырабатываются бортовой ИНС с радиокоррекцией по данным наземной РЛС;
- участок Т2, t ∈ [τдв, tТ.В – τГСН] – полет УГЧ под управлением бортовой ИНС с радиокоррекцией по данным наземной РЛС. Осуществляется поперечное управление полетом с помощью ДПУ (угол атаки обнулен);
- участок Т3, t ∈ [tТ.В – τГСН, tТ.В] – самонаведение УГЧ под управлением ГСН в течение времени τГСН. Осуществляется поперечное управление полетом, как на участке Т3, однако управляющие команды вырабатываются по данным ГСН.
Примем, что ГСН УГЧ способна захватить на автосопровождение рассматриваемую БЦ на дальности ~90–100 км (обоснование дальности захвата БЦ ГСН ракеты THAAD приведено в [20]). С учетом встречных скоростей цели и ракеты время самонаведения τГСН составляет ~15 с.
Определим ограничения по перегрузкам на управление. На участке Т1 ракета достигает высоты 20–25 км (в зависимости от траектории полета) и максимальной скорости ~2800 м/с. Примем следующие значения коэффициентов функции располагаемых перегрузок Wарасп(Vр, hр) (формула (10)): k1 = 30 c–1, k2 = 0,42. При таких значениях k1, k2располагаемые перегрузки Wарасп составляют 50–80 g0 на малых высотах (до значений hр = 4 км) и 4,0–7,5 g0 на высотах 20–25 км, что характерно для бескрылых высокоскоростных ЗУР рассматриваемого типа.
Для участков Т2, Т3, исходя из вычисленного выше диапазона изменения перегрузок Wпрасп = 1,2–1,6g0 при равномерной выработке топлива ДПУ, примем максимальное управляющее ускорение ДПУ равным Wпмакс = 3 g0. В процессе моделировании учтем также ограничение управления по располагаемому запасу топлива ДПУ – управление ДПУ может осуществляться при условии, что текущее значение Vхар.у ≤ Vхаогрр.у = 1297 м/с.
Для участка самонаведения Т3 примем ограничение на угловую скорость сопровождения цели ГСН равным Ωогр = 10 °/с.
Потенциальная точность измерения координат БЦ определяется характеристиками РЛС AN/TPY-2 и ГСН, информация которых используется при выработке команд управления соответственно на участках Т1, Т2 и Т3. РЛС AN/TPY-2 имеет ширину луча ~ 0.6° [17]. Для ГСН ракеты примем ширину поля зрения ~ 1° (см. [20]), размер матрицы 512×512 элементов. Угловую точность сопровождения цели в соответствии с методикой, предложенной в [20], оценим значениями: для РЛС AN/TPY-2 – 0.006°, для ГСН – 0.002°.
Параметры тракта формирования управляющего ускорения сведены в таблицу 1.
Таблица 1
Значения параметров тракта формирования управляющего ускорения на различных участках полета
|
Участок полета |
Фильтры Ф1, Ф2 |
ССП η |
Измерение Wц |
КоэффициентКм |
||||
|
ТФ1, с |
ТФ2, с |
τкη, с |
ση, рад |
ТФ3, с |
τкζ, с |
σζ, м/с2 |
||
|
Т1 |
0,05 |
0,3 |
0,5 |
1•10–5 |
0,1 |
1,5 |
0,01 |
7 |
|
Т2 |
0,05 |
0,05 |
0,5 |
1•10–5 |
0,1 |
1,5 |
0,01 |
10 |
|
Т3 |
0,05 |
0,05 |
0,1 |
3,5•10–6 |
0,05 |
1,5 |
0,01 |
8 |
Приведенные в таблице значения параметра ТФ1 фильтра Ф1 заданы по результатам нескольких циклов моделирования по критерию минимума достигаемого промаха. ПараметрТФ2 определен исходя из прогресса технологий в исполнительных органах систем управления ракет [6][21]. Характеристики шумового процесса η определены в предположении отсутствия преднамеренных помех. Среднеквадратичное отклонение угловых шумов ση оценено величиной 1/10 от потенциальной точности сопровождения цели по угловым координатам. Время корреляции τкη определено исходя из особенностей угловых флуктуаций сигнала цели [22]. Параметры измерения ИНС ускорения цели Wц заданы исходя из возможных характеристик соответствующего алгоритма траекторной обработки. Коэффициент метода Км определен по результатам предварительного моделирования, исходя из необходимости минимизации промаха, на основе поиска компромисса между динамическими (влияние фильтров Ф1, Ф2) и флуктуационными (влияние шумового процесса η) ошибками наведения. Ошибки ИНС при измерении вектора скорости цели приняты нулевыми: Vризм = Vр.
Результаты моделирования
Моделирование заключалось в численном интегрировании приведенных выше уравнений динамики, составленных с использованием аналитических зависимостей для управления и кинематики ракеты, при заданных исходных данных по ракете и цели.
В связи с наличием в модели случайных переменных η и ζ результаты моделирования подвергались статистической обработке. Количественные оценки показателей качества наведения представляют собой средние значения, полученные по результатам 10–15 независимых реализаций модели (циклов моделирования). Графики приведены для одной произвольно выбранной реализации. Шаг интегрирования Δt согласован с параметрами случайных процессов.
На графиках крестиком отмечена точка, для которой расстояние rотн минимально (точка встречи). В качестве критерия поражения цели принята величина промаха в точке встречи, не превышающая трети диаметра цели: h < dц/3 = 0,2 м (критерий кинетического поражения).
Модель и расчеты выполнены в программной среде Mathcad.
1. Цель не маневрирует. Основные результаты моделирования приведены на рисунках 8–10.


Рис. 9. Реализация случайного процесса η на интервале [0, tТ.В]

Моделирование показало, что для заданных исходных данных критерий поражения цели выполняется: величина промаха в точке встречи составила h = 0,006 м. Координаты точки встречи: rТВ = (177, 145, 25)т км, скорость ракеты в точке встречи Vр = 1951 м/с, средняя скорость ракеты за время полета Vр.ср = 2004 м/с. Характеристическая управляющая скорость ДПУ в точке встречи составила Vхар.дпу = 1097 м/с. Так как Vхар.дпу < Vхаогрр.дпу, то ДПУ за время полета не выработал всего запаса топлива.
2. Цель совершает маневр перед встречей. Продолжительность маневра τц.м = 5 с, интенсивность варьируется. Основные результаты моделирования приведены на рисунке 11.

Рис. 11.Результаты моделирования движения ракеты
при перехвате маневрирующей цели
(графики левого столбца – при gц.м = 2,5 g0,
графики правого столбца – при gц.м = 3 g0):
а) траектории ракеты и цели в плоскости zОх вблизи точки встречи;
б) управляющее ускорение ракеты Wр.у и полное ускорение цели Wц;
в) угловая скорость ЛРЦ Ω;
г) промах h (вблизи точки встречи)
По результатам моделирования при ускорении маневра цели gц.м= 2,5 g0 величина промаха в точке встречи составила h = 0,05 м, критерий поражения цели выполнен; при gц.м = 3 g0 промах h =11,15 м – цель не поражена. Непоражение цели обусловлено динамическими ошибками, при этом ДПУ не выработал всего запаса топлива: на интервале времени работы ДПУ Vхар.у = 1205 м/с < Vхаогрр.у.
При дальнейшем увеличении интенсивности маневра (более 3 g0) величина промаха в точке встречи резко растет (см. рис. 12а) ввиду возрастания влияния инерционности элементов тракта формирования управляющего ускорения. При продолжительности маневра цели перед точкой встречи более 10 с и интенсивности более 2,5 g0 (см. рис. 12б) причиной промаха становится нехватка запаса топлива ДПУ на отработку маневра (Vхар.у > Vхаогрр.у).

Рис. 12.Промах h (вблизи точки встречи) при параметрах маневра цели:
а) τц.м = 5 с, gц.м = 4 g0; б) τц.м = 10 с, gц.м = 2,5 g0
3. Цель прикрыта помехами. Оценка влияния помех на наведение ракеты осуществлялась путем варьирования параметров шумового процесса η на различных участках полета ракеты. Наибольшее влияние на величину промаха оказывает увеличение СКО шумового процесса ση на участке самонаведения. В случае отсутствия маневра цели даже значительное увеличение ση успешно компенсируется увеличением на участке полета Т3 параметра ТФ1 фильтра Ф1 (подавление флуктуационной ошибки). Так, при росте СКО на порядок (ση = 3,5•10–5 рад) за счет увеличения ТФ1 до 1,0 с обеспечивается выполнение критерия поражения (промах составляет h = 0,08 м).
Однако в случае маневра цели увеличение параметра ТФ1 ведет к росту динамической ошибки. Для цели, совершающей маневр с параметрами τц.м = 5 с, gц.м = 2,5 g0, критерий поражения не выполняется при увеличении ση уже в 3 раза (при ση > 1•10–5 рад на участке полета Т3). Основные результаты моделирования приведены на рисунке 13.

Рис. 13.Результаты моделирования движения ракеты
в условиях прикрытия цели помехами:
графики левого столбца – цель не маневрирует,
на участке полета Т3 параметры ση = 3,5×10–5 рад, ТФ1 = 1,0 с, h = 0,08 м;
графики правого столбца – цель маневрирует с параметрами τц.м = 5 с, gц.м = 2,5 g0,
на участке полета Т3 параметры ση = 1×10–5 рад, ТФ1 = 0,05 с, h = 0,24 м
4. Оценка возможности поражения цели в различных точках пространства. Для оценки возможности поражения цели в различных точках пространства (в пределах предполагаемых границ зоны поражения) выполнено моделирование перехвата цели при последовательном изменении начальных параметров ее траектории. Для каждого варианта начальных параметров траектории цели также, исходя из критерия минимизации промаха, подбирались начальный угол тангажа ракеты и значения коэффициента метода на различных участках полета ЗУР. Некоторые результаты моделирования показаны на рисунке 14.

Рис. 14. Траектории ракеты (красная) и неманеврирующей цели (синяя) при перехвате в различных точках пространства
Моделирование показало, что минимизация промаха обеспечивается при условии относительно равномерного распределения управляющих ускорений по траектории полета ЗУР. В случае если на каком-либо участке полета по сравнению с другими участками для наведения ракеты требуются повышенные управляющие ускорения, величина промаха будет большой, поражение цели не обеспечивается. Рациональное распределение управляющих ускорений по траектории полета достигается за счет подбора параметров тракта формирования ускорения на различных участках полета
и, прежде всего, коэффициента метода, с учетом особенностей траектории цели. Другой общей закономерностью перехвата цели в различных точках пространства является снижение промаха с уменьшением расстояния до точки перехвата, что объясняется увеличением скорости ракеты в точке встречи при полете на меньшие расстояния и, соответственно, увеличением управляющего ускорения. Выявлено, что в случае отсутствия маневра цели всегда можно подобрать набор параметров ЗУР, при котором обеспечивается поражение цели. В то же время маневр цели перед встречей, в том числе одновременно с использованием преднамеренных помех системе управления сравнительно небольшой интенсивности, является эффективной мерой противодействия перехвату. Для недопущения кинетического поражения цели при продолжительности ее маневра 5–10 синтенсивность маневра должна составлять не менее 1,5–2 g0.
Необходимо отметить, что расчеты по оценке возможностей ЗУР типа THAAD выполнены в условиях неполноты исходных данных, для максимально достижимых значений неизвестных конструктивных характеристик и в предположении использования в ракете эффективных методов управления полетом (в частности, компенсации негативного действия на управление различных факторов). Можно ожидать, что реальные возможности ЗУР не превосходят полученных оценок.
Приведенные результаты оценки возможностей ЗУР с использованием разработанной модели являются небольшим демонстрационным фрагментом ее возможностей.
Заключение
Разработанная модель позволяет решать задачу оценки характеристик и возможностей ЗУР СД (БД) в условиях неполноты исходных данных, свойственную исследованиям зарубежных вооружений, а также ранним этапам проектирования отечественных ЗУР. Работоспособность модели подтверждается как наличием в модели аналитических зависимостей, описывающих наиболее существенные процессы функционирования ЗУР, так и результатами моделирования, выполненного для демонстрации возможностей модели. Получаемые с помощью модели результаты устойчивы и соответствуют физической сущности моделируемых процессов.