Время на прочтение
7 мин
Количество просмотров 160K
Приветствую вас, друзья!
В ходе изучения Цифровых систем передачи, а так же по рекомендации наставника, дабы лучше разобраться в изучаемом материале и разложить всё по полочкам, я постараюсь объяснить этот материал Вам, если это у меня получится, то можно считать, что я его усвоил хорошо. Надеюсь Вам будет интересно.
В статье расскажу кратко о ЦСП и особенностях их построения, ПЦИ(PDH) и более подробно о потоке Е1 и его структуре.
Цифровые системы передачи
Особенности построения цифровых систем передачи
Ни для кого не будет новостью, что основной тенденцией развития телекоммуникаций во всем мире является цифровизация сетей связи, предусматривающая построение сети на базе цифровых методов передачи и коммутации. Это объясняется следующими существенными преимуществами цифровых методов передачи перед аналоговыми:
Высокая помехоустойчивость.
- Слабая зависимость качества передачи от длины линии связи.
- Стабильность параметров каналов ЦСП.
- Эффективность использования пропускной способности каналов для передачи дискретных сигналов.
- Возможность построения цифровой сети связи.
- Высокие технико-экономические показатели.
Требования к ЦСП определены в рекомендациях ITU-T серии G, так же в этой рекомендации представлено два типа иерархий ЦСП: плезиохронная цифровая иерархия (ПЦИ) и синхронная цифровая иерархия (СЦИ). Первичным сигналом для всех типов ЦСП является цифровой поток со скоростью передачи 64 Кбит/с, называемый основном цифровом каналом (ОЦК)[зарубежные источники: Basic Digital Circuit(BDC)], на Хабре уже рассказывалось о том как происходит оцифровка каналов ТЧ в этой статье. Для объединения сигналов ОЦК в групповые высокоскоростные цифровые сигналы используется принцип временного разделения каналов (ВРК)[зарубежные источники: Time Division Multiply Access (TDMA), или Time Division Multiplexing (TDM)].
Плезиохронная цифровая иерархия
Появившаяся исторически первой плезиохронная цифровая иерархия (ПЦИ) [зарубежные источники: Plesiochronous Digital Hierarchy(PDH)] имеет европейскую, северо-американскую и японскую разновидности.
| Уровень иерархии | Европа | Северная Америка | Япония | |||
| Скорость Мбит/с | Коэфф. Мультиплекс. | Скорость Мбит/с | Коэфф. Мультиплекс. | Скорость Мбит/с | Коэфф. Мультиплекс. | |
| 0 | 0,064 | — | 0,064 | — | 0,064 | — |
| 1 | 2,048 | 30 | 1,554 | 24 | 1,554 | 24 |
| 2 | 8,448 | 4 | 6,312 | 4 | 6,312 | 4 |
| 3 | 34,368 | 4 | 44,736 | 7 | 32,064 | 5 |
| 4 | 139,264 | 4 | — | — | 97,728 | 3 |
Для цифровых потоков ПЦИ применяют соответствующие обозначения, для северо-американской — T, японской — J(DS), европейской — E. Цифровые потоки первого уровня обозначаются соответственно Т1, E1, J1 второго Т2, Е2, J2 и т.д…
К использованию на сетях связи РФ принята европейская ПЦИ.
На сети связи РФ эксплуатируются ЦСП ПЦИ отечественного и зарубежного производства. Отечественные системы носят название ЦСП с ИКМ (цифровые системы передачи с импульсно-кодовой модуляцией). Вместо уровня иерархии в обозначении системы указывается число информационных ОЦК данной системы. Так, ЦСП первого уровня иерархии обозначается ИКМ-30, второго — ИКМ-120 и т.д.
Основные принципы синхронизации
В плезиохронных, «как бы синхронных», ЦСП используется принцип ВРК, поэтому правильное восстановление исходных сигналов на приеме возможно только при синхронной и синфазной работе генераторного борудования на передающей и приемной станциях. Для нормальной работы плезиохронных ЦСП должны быть обеспечены следующие виды синхронизации:
Тактовая синхронизация
обеспечивает равенство скоростей обработки цифровых сигналов в линейных и станционных регенераторах, кодеках и других устройствах ЦСП, осуществляющих обработку сигнала с тактовой частотой Fт.
Существует несколько вариантов тактовой синхронизации:
- Сонаправленный интерфейс: по отдельным линиям ведётся дополнительная передача тактовых сигналов;
- Противонаправленный интерфейс: один блок (контролирующий) задает другому (подчиненному) рабочую тактовую частоту;
- Интерфейс с централизованным задатчиком (задающим генератором): задающий генератор выполняет тактирование всех узлов оборудования.
Цикловая синхронизация
обеспечивает правильное разделение и декодирование кодовых групп цифрового сигнала и распределение декодированных отсчетов по соответствующим каналам в приемной части аппаратуры;
Цикловая синхронизация осуществляется следующим образом. На передающей станции в состав группового цифрового сигнала в начале цикла вводится цифровой синхросигнал (СС). На приемной станции устанавливается приемник синхросигнала (ПСС), который выделяет цикловой синхросигнал из группового цифрового сигнала и тем самым определяет начало цикла передачи.
Поток Е1
Структура потока Е1.
Различают 3 типа потока Е1:
- Неструктурированный (нет разделения на канальные интервалы КИ [зарубежные источники: Time Slot], логическая структура не выделяется; поток данных со скоростью 2048Kбит/с); используется при передаче данных;
- Поток с цикловой структурой (выделяются канальные интервалы, но сигналы управления и взаимодействия (СУВ) не передаются) – ИКМ-31;
- Поток со сверхцикловой структурой (выделяют и цикловую, и сверхцикловую структуру) – ИКМ-30.
Рассмотрим структуру кадра передачи ЦСП ИКМ-30.
Структура потока Е1 определена в рекомендации ITU-T G.704. Данный поток называется первичным цифровым потоком и организуется объединением 30-ти информационных ОЦК.
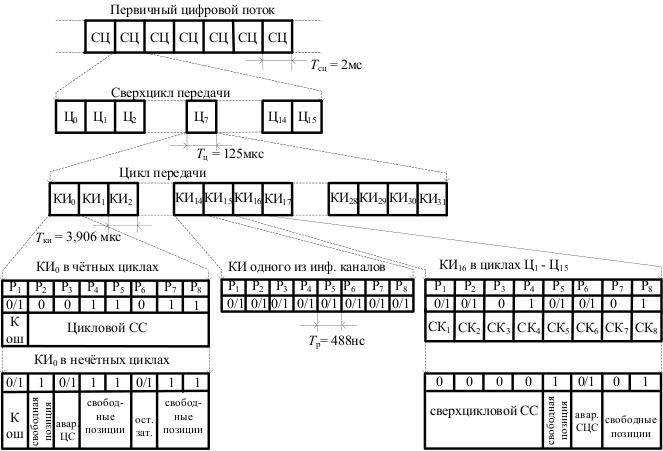
Линейный сигнал системы построен на основе сверхциклов, циклов, канальных и тактовых интервалов, как это показано на рисунке выше (обозначение 0/1 соответствует передаче в данном тактовом интервале случайного сигнала). Сверхцикл передачи (СЦ) соответствует минимальному интервалу времени, за который передаётся один отсчёт каждого из 60 сигнальных каналов (СК) и каналов передачи аварийной сигнализации (потери сверхцикловой или цикловой синхронизации). Длительность СЦ Тсц=2мс. Сверхцикл состоит из 16 циклов передачи (с Ц0 по Ц15). Длительность цикла Тц=125мкс и соответствует интервалу дискретизации канала ТЧ с частотой 8 кГц. Каждый цикл подразделяется на 32 канальных интервала(таймслота) длительностью Тки=3,906 мкс. Канальные интервалы КИ1-КИ15, КИ17-КИ31 отведены под передачу информационных сигналов. КИ0 и КИ16 — под передачу служебной информации. Каждый канальный интервал состоит из восьми интервалов разрядов (Р1-Р8) длительностью по Тр=488нс. Половина разрядного интервала может быть занята прямоугольным импульсом длительностью Ти=244нс при передаче в данном разряде единицы (при передаче нуля импульс в разрядном интервале отсутствует). Интервалы КИ0 в четных циклах предназначаются для передачи циклового синхросигнала (ЦСС), имеющего вид 0011011 и занимающего интервалы Р2 — Р8. В интервале Р1 всех циклов передается информация постоянно действующего канала передачи данных (ДИ). В нечетных циклах интервалы P3 и Р6 КИ0 используются для передачи информации о потере цикловой синхронизации (Авар. ЦС — LOF) и снижении остаточного затухания каналов до значения, при котором в них может возникнуть самовозбуждение (Ост. зат). Интервалы Р4, Р5, Р7 и Р8 являются свободными, их занимают единичными сигналами для улучшения работы выделителей тактовой частоты. В интервале КИ16 нулевого цикла (Ц0) передается сверхцикловой синхросигнал вида 0000 (Р1 — Р4), а также сигнал о потере сверхцикловой синхронизации (Р6 — Авар. СЦС — LOM). Остальные три разрядных интервала свободны. В канальном интервале КИ16 остальных циклов (Ц1 — Ц15) передаются сигналы служебных каналов СК1 и СК2, причем в Ц1 передаются СК для 1-го и 16-го каналов ТЧ, в Ц2 — для 2-го и 17-го и т.д. Интервалы Р3, Р4, Р6 и Р7 свободны. С точки зрения передачи телефонного канала: телефонный канал является 8-ми битным отсчётом. Полезная нагрузка – разговор двух абонентов. Кроме того передаётся служебная информация (набор номера, отбой и т.п.) – сигналы управления и взаимодействия (СУВ). Для передачи таких сигналов достаточно повторения их 1 раз в 15 циклов, при этом каждый СУВ будет занимать 4 бита (СУВ для какого-то конкретного канала). Для этих целей был выбран 16-й канальный интервал. В один канал помещаются СУВ для двух телефонных каналов. Т.к. всего 30 каналов, за один разговор используется два канала, то цикл нужно повторить 15 раз, следовательно, с Ц1 по Ц15 передаём всю информацию о СУВ. Таким образом, необходимо определить номер цикла. Для этих целей нулевой цикл содержит сверхцикловой СС («0000» в 1-х четырёх байтах –MFAS). В 6-м бите передаётся потеря сверхцикла (LOM).
Мне приходилось сталкиваться с людьми которые пытаясь объяснить структуру потока Е1 предстовляли его в качестве трубы, куда запиханы 32 трубы меньшего размера(32 таймслота), это довольно наглядно, но абсолютно не правильно т.к. в ПЦИ передача данных осуществляется последовательно, побитно, а не параллельно.
Контроль ошибок передачи
Для контроля ошибок передачи используется первый бит нулевого канального интервала.

Содержимое первого бита КИ0 в различных подциклах.
По полиному x4+x+1 определяется наличие ошибки. Биты С1, С2, С3, С4 – это остаток от деления подцикла (8-ми циклов) на полином x4+x+1. При этом результат вставляют в следующий подцикл. Принимаем значение 1-го подцикла, сравниваем со 2 – м. При несовпадении выдаётся сообщение об ошибке. Биты Е1 и Е2 предназначены для передачи сообщений об ошибке на сторону передатчика по первому и по второму циклу (Е1 – для первого, Е2 – для второго). Для корректной обработки в чётных циклах (кроме 14 и 16) вводится сверхцикловой синхросигнал (001011) для контроля ошибок.
Физический уровень модель OSI в ПЦИ
Физический уровень включает в себя описание электрических параметров интерфейсов и параметров сигналов передачи, включая структуру линейного кода. Эти параметры описаны в Рекомендации ITU-T G.703.
Для ПЦИ определены следующие физические интерфейсы:
- Е0 – симметричная пара (120 Ом);
- Е1 – коаксиальный кабель (75 Ом) или симметричная пара (120 Ом);
- E2, Е3, E4 – коаксиальный кабель (75 Ом).
Для потоков определено использование следующих линейных кодов:
- Е0 – AMI;
- E1, E2, Е3 – HDB3;
- Е4 – CMI.
Для каждого потока определена маска допустимых пределов формы импульса в линии. На рисунке изображена маска для потока Е1.
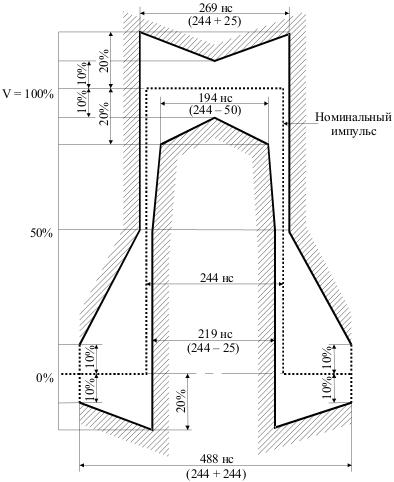
Маска импульса физического интерфейса потока 2048 Кбит/с.
На этом я считаю можно остановиться. Всем спасибо за внимание, надеюсь Вам было интересно.
Подписывайтесь, ставьте лайки…
В статье я попытался изложить как можно больше информации в как можно более простом виде(не знаю удалось ли мне) не ныряя слишком глубоко в подробности структур ЦСП и в частности потока Е1.
Если статья понравится то в дальнейшем могу попробывать написать такую же про синхронную цифровую иерархию (СЦИ) [зарубежные источники: Synchronous Digital Hierarchy(SDH)] и синхронный транспортный модуль (СТМ) [зарубежные источники: Synchronous Transport Module(STM)] — STM-1.
Литература
Технологии измерений первичной сети — И.Г. Бакланов;
Современные высокоскоростные цифровые телекоммуникационные системы — В.Н. Гордиенко.
UPD:Немного дополнил статью англоязычными терминами и аббревиатурами.
методологии и появления рекомендации М.2101, где определены пороговые значения для прове дения измерений систем передачи SDH.
Рис. 3.18. Схема измерений параметров каналов цифровой системы передачи методом пассивного мониторинга
Второй важной особенностью методологии М.2100/М.2101 явля ется уменьшение времени прове дения измерений до 15 минут с по следующими измерениями в тече нии 24 часов, если результат крат ковременного измерения окажется в «средней зоне» (рис. 3.19).
Третьей отличительной осо бенностью методологии М.2100/ М.2101 является использование не одного как в G.821/G.826, а двух пороговых значений для выделения «средней зоны» (рис.3.19). Если результат измерения попадает в
«среднюю зону», он нуждается в дополнительном уточнении мето-
дами долговременного анализа.
Не прохождение
Не прохождение
«Средняя зона» Результат нуждается в уточнении
Прохождение
Прохождение
Л
Рис. 3.19. Методика индикационных измерений М.2100
Приказ Госкомсвязи №92 [9] представляет собой единственный действующий российский стандарт, определяющий нормы на параметры ошибок в каналах и трактах цифровой первичной сети. С точки зрения описанных выше подходов к методологии, Приказ №92 представляет собой объединение перечисленных выше норм. Перечень параметров ошибки, описываемый Приказом №92, представлен на рис. 3.20.
Все нормы на параметры цифровой первичной сети в Приказе №92 разделены на две груп пы: долговременные и оперативные нормы. Долговременные нормы в свою очередь отдельно формулируются для каналов первичной сети (ОЦК) и для трактов PDH. В соответствии с междуна родными стандартами нормы на параметры ОЦК сформулированы на основе G.821, нормы на па раметры трактов PDH — на основе рек. G.826.
Методология оперативных (эксплуатационных) измерений создана на основе методоло гии М.2100, М.2110, М.2120. В Приказе №92 нашла отражение различная интерпретация парамет ров ES и SES по G.821 и G.826. Для разделения параметров ES и SES для канала и тракта исполь зуются префиксы ESK и ESJ соответственно. Соответственно описанным выше методологиям, для долговременных и оперативных измерений определен набор измеряемых параметров. Стандарт
определяет нормы по каждому параметру и методы расчета параметров для реальной системы передачи.
Рис. 3.20. Методология измерений Приказа №92
Необходимо отметить, что параметры, определенные в этом стандарте, не включают допол нительные производные параметры ошибок, таким образом, реальные возможности измеритель ных приборов и методологий, лежащих в основе Приказа №92, оказываются несколько шире мето дик, описанных в этом стандарте.
Измерение параметров кодовых ошибок. Связь кодовых и битовых ошибок
Кодовыми ошибками или ошибками кодирования называются любые нарушения правил ли нейного кодирования, описанных в разделе 2.2. Как было показано, для систем передачи Е1 наи большее распространение получили два типа линейного кодирования: AMI и HDB3. Из этих типов линейного кодирования последний представляет собой наиболее распространенный в современ ной практике тип линейного кода. Кодирование HDB3, как было показано на рис. 2.3, предусмат ривает использование определенного алгоритма вставок импульсов для сохранения помехозащи
|
щенности кода на физическом уровне. В |
|||||||||
|
результате в системах Е1 |
могут возникать |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
|
|
ошибки линейного кодирования, связанные |
|||||||||
|
с нарушением этого алгоритма, так что ко |
Сигнал NRZ |
— 1 |
————————- ► |
||||||
|
довые ошибки встречаются в современной |
t |
||||||||
|
практике измерений Е1. |
Сигнал HDB3 |
11 |
[|в bit |
|Jv bit*t |
|||||
|
Следует отметить, |
что кодовые |
без ошибок |
у |
||||||
|
ошибки представляют собой независимый |
|||||||||
|
по отношению к битовым ошибкам пара |
Появление ошибки |
[~~ |
й |
‘ |
>- |
||||
|
метр. Действительно, кодовая ошибка в |
и |
||||||||
|
различных случаях может привести к одной |
передаче HDB3 |
[J |
и |
‘ |
|||||
|
или нескольким битовым ошибкам, а может |
Декодированный |
||||||||
|
и не привести к появлению битовой ошиб |
————— W |
||||||||
|
ки. Так, на рис. 3.21 показан пример воз |
|||||||||
|
никновения нескольких битовых ошибок из- |
Дополнительные ошибки |
||||||||
|
за одной кодовой. Как показано на рисун |
|||||||||
|
ке, при распространении линейного сигна |
Рис. 3.21. Возникновение битовых ошибок |
||||||||
|
ла с кодом HDB3 по каналу возникает ко |
при ошибке кодирования HDB3 |
||||||||
|
довая ошибка, которая при декодировании |
приводит к двум битовым ошибкам.
Из перечисленных причин возникновения сбоя только последняя требует эксплуатационного анализа FAS и MFAS. Однако, учитывая уровень развития технологии PDH, следует отметить, что эта причина является маловероятной.
Две первые причины возникновения сбоя в FAS и MFAS не требуют детального анализа цик ловой и сверхцикловой структуры. В случае возникновения единичной битовой ошибки в TS0 или TS16, алгоритмы поддержания цикловой и сверхцикловой синхронизации, реализованные в обору довании, позволят сохранить синхронизацию и не приведут к появлению секунд неготовности ка нала. Появление битовой ошибки в TS0 или TS16 в течении нескольких последовательных циклов (сверхциклов) маловероятно за исключением случаев, когда общий параметр ошибок приближает ся к порогу BER=10-3, что уже означает неготовность канала.
В случае появления неисправности в работе каналообразующего оборудования, эту неис правность легко обнаружить без детального анализа цикловой структуры. Такой сбой должен при вести к увеличению параметра UAS в процессе теста по параметрам ошибки, а также регулярному появлению сигналов о неисправности типа LOS, LOF и AIS.
Таким образом, анализ цикловой и сверхцикловой структур представляет собой группу допол нительных к измерению параметра ошибки измерений канального уровня. Дополнительный характер этих измерений отразился в том, что в большинстве приборов анализ FAS и MFAS делается только на уровне индикации появления ошибки цикловой и сверхцикловой структур. В этом случае при по явлении такой ошибки, анализатор генерирует на экране соответствующий сигнал о неисправности. Характер нарушения цикловой и сверхцикловой структур оказывается недоступным для изучения. Согласно табл. 2.3, к сигналам о неисправности FAS и MFAS относятся несколько сигналов: LOF, CAS-LOM, CRC-LOM, MAIS и MRAI. Все перечисленные сигналы могут нести полезную информацию о нарушениях в цикловой и сверхцикловой структурах сигналов. Перечисленные сигналы о неисправ ностях могут как использоваться в системе самодиагностики и управления в системе передачи, так и генерироваться анализаторами Е1 в случае возникновения ошибки.
Следует отметить, что ряд анализаторов Е1 обеспечивает непосредственное отображение битов цикловой и сверхцикловой структур, например рис. 3.23.
|
07:31:55 |
06:30:55 |
||||||
|
FAS FRAME |
WORDS |
MFAS FRAME WORDS |
|||||
|
FRM |
12345678 |
FRM |
12345678 |
FRM |
12345678 |
FRM |
12345678 |
|
c O O H O l l |
ilasssss |
0 |
OOOOxyxx |
ABCDabcd |
|||
|
0 |
00011011 |
1 |
01011111 |
00001011 |
1 |
11011101 |
|
|
2 |
10011011 |
3 |
01011111 |
2 |
11011101 |
3 |
11011101 |
|
4 |
00011011 |
5 |
11011111 |
4 |
11011101 |
5 |
11011101 |
|
6 |
00011011 |
7 |
01011111 |
6 |
11011101 |
7 |
11011101 |
|
8 |
10011011 |
9 |
11011111 |
8 |
11011101 |
9 |
11011101 |
|
10 |
00011011 |
11 |
11011111 |
10 |
11011101 |
11 |
11011101 |
|
12 |
00011011 |
13 |
11011111 |
12 |
11011101 |
13 |
11011101 |
|
14 |
00011011 |
15 |
11011111 |
14 |
11011101 |
15 |
11011101 |
|
RESUME |
RESUME |
Рис. 3.23. Отображение цикловой и сверхцикловой структур потока Е1 (анализатор SunSet Е1е)
Как видно из рис. 3.23, структура FAS и MFAS отображается в соответствии с типовыми струк турами, представленными на рис. 2.6 и 2.7 соответственно.
Измерения параметров качества аналоговых сигналов, передаваемых в системе Е1
Последней группой измерений канального уровня в системах передачи Е1 является анализ параметров качества передачи аналоговых сигналов. Эта категория измерений первичной сети ха рактерна только для систем передачи Е1, поскольку только в потоке Е1 осуществляется прямое мультиплексирование аналоговых сигналов (каналов ТЧ). При эксплуатации систем передачи Е1 возникает задача оценки качества предоставляемых ими аналоговых каналов. Речь идет именно об оценке, поскольку полный анализ аналогового канала предусматривает тестирование по специфи кации измерений каналов ТЧ и для эксплуатации цифровой первичной сети вряд ли оправдан.
Для проведения измерений по оценке качества аналоговых сигналов используется методоло гия тонального тестирования внутри потока Е1. Для этого анализатор Е1 в цифровом виде переда ет одночастотный сигнал в одном из канальных интервалов. Также для анализа может использо ваться сторонний генератор одночастотного аналогового сигнала, подключаемый непосредственно ко входу мультиплексора ИКМ-30. Второй анализатор (рис. 3.26) восстанавливает одночастотный сигнал и анализирует параметры качества передачи аналогового сигнала. К таким параметрам мо гут относиться:
Структура цикла и сверхцикла. Цифровой поток, передаваемый по сети, имеет стандартную логическую структуру — цикл (frame). Такая структура обеспечивает процедуры мультиплексирования и демультиплексирования, а также передачу служебной информации (управляющей, встроенной диагностики).
Поток Е1 по своей структуре может быть: неструктурированным, с цикловой структурой, с цикловой и сверхцикловой структурой.
Неструктурированный поток не разделен на канальные интервалы (обычно это каналы 64 Кбит/с).
Поток с цикловой структурой разделен на 32 канальных интервала от 0 до 31. Структура цикла определена Рекомендацией G.704 и приведена на рис. 3.10. Как видно из рисунка, цикл имеет длину 256 бит, каждый канальный интервал КИ имеет 8 бит, скорость с которой передается каждый бит, составляет 8000 Гц. Таким образом, скорость в каждом канальном интервале КИ составляет 8 бит х 8000 Гц = 64 000 Гц.
Сигнал FAS (Frame Alignment Signal) является сигналом цикловой синхронизации и передается в нулевом канальном интервале КИО нечетных по порядку следования циклов, т.е. циклов с номерами 0, 2, 4,… Сигнал NFAS передается в КИО четных циклов — 1, 3, 5,…
Распределение бит с 1 по 8 в цикле приведено в табл. 3.2.
Поток с цикловой и сверхцикловой структурой представляет собой объединение 16 циклов, пронумерованных от 0 до 15, в один сверхцикл (Multi frame), как показано на рис. 3.11.
Рис. 3.10. Структура цикла Е1
Распределение бит 1-8 цикла Е1
|
Номер бита |
Фрейм с FAS |
Фрейм без FAS |
Примечания |
|
1 |
S, |
Б, — биты, зарезервированные под задачи международного использования |
|
|
2 |
0 |
1 |
— |
|
3 |
0 |
А |
Биты индикации аварии на удаленном конце. В случае аварии А = 1, при отсутствии аварии А = 0 |
|
4 |
1 |
S4 |
Биты предназначены под задачи националь- |
|
5 |
1 |
S, |
ного использования |
|
6 |
0 |
S* |
|
|
7 |
1 |
S7 |
|
|
8 |
1 |
S8 |
Сверхцикл делится на два подсверхцикла (SMF — Sub Multiframe) по 8 циклов каждый, обозначаемые SMFI и SMFII. SMF является блоком размером 2048 бит (8 строк по 256 бит). Значения бит 1-8 сверхцикла показаны в табл. 3.3.
В структуре сверхцикла сигнал FAS каждого цикла теряет свою значимость, так как необходимо иметь информацию о сверхцикле MFAS (Multi Frame Alignment Signal) в целом. Такая информация содержится в шестнадцатом канальном интервале нулевого цикла. Сигнал MFAS имеет вид 0000XYXX.
Рис. 3.11. Структура сверхцикла Е1
Значения бит 1-8 сверхцнкла
|
Подсверх цикл |
Цикл |
Биты 1-8 в нулевом канальном интервале нулевого цикла |
||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|||
|
0 |
с, |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
||
|
1 |
0 |
1 |
А |
s4 |
s5 |
S6 |
S7 |
s8 |
||
|
С |
2 |
с2 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
|
|
в Е |
SMFI |
3 4 |
0 С3 |
1 0 |
А 0 |
S4 1 |
S5 1 |
S6 0 |
S7 1 |
S8 1 |
|
Р |
5 |
1 |
1 |
А |
s4 |
S5 |
S6 |
s7 |
S8 |
|
|
X |
6 |
С4 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
|
|
ц |
7 |
0 |
1 |
А |
S4 |
S5 |
S6 |
S7 |
s8 |
|
|
и |
8 |
С, |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
|
|
к |
9 |
1 |
1 |
А |
s4 |
S5 |
S6 |
S7 |
S8 |
|
|
л |
10 |
с2 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
|
|
SMFII |
11 |
1 |
1 |
А |
s4 |
S5 |
S6 |
s7 |
S8 |
|
|
12 |
Сз |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
||
|
13 |
Е |
1 |
А |
s4 |
S5 |
S6 |
S7 |
s8 |
||
|
14 |
С4 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
||
|
15 |
Е |
1 |
А |
S4 |
S5 |
S6 |
S7 |
S8 |
Во фреймах, не содержащих сигнал FAS, бит 1 в нулевом канальном интервале используется для передачи сигнала сверхцикловой структуры (001011) и двух бит индикации ошибки Е.
При объединении циклов в один сверхцикл, появляется возможность встроенной диагностики при использовании циклического кода с избыточностью (CRC-4 — Cyclic Redundancy Check), который формирует четыре бита С} С2 С3 С4. Эти биты располагаются на месте бита 1 (S,) в циклах, содержащих сигнал FAS. Процедура CRC-4 представляет собой простой математический расчет, заключающийся в следующем:
на этапе кодирования:
— биты CRC-4 в SMF заменяются двоичными нулями;
— поток бит SMF преобразуется в полином D(x):
D(x) = «2047 х2047 + «2046 *2046 + +«2х1 + х + aQ>
где а = 0 или 1, степень х определяется позицией бита внутри SMF;
— БМЕ умножается на х4, затем делится по модулю 2 на образующий полином вида: С(х)= х4 + х +1:
х4?>(х)/С(х) = <2(х)+ к(х)1 С(х);
— результат деления запоминается и затем вставляется на соответствующие места бит С1С2С3С4 следующего 8МЕ.
на этапе декодирования:
— в принятом БМР биты С1С2С3С4 заменяются двоичными нулями.
— 8МР проходит обработку, аналогичную описанной выше.
— остаток от деления, полученный декодером, сравнивается с остатком, принимаемым в следующем подсверхцикле 8МР.
Если оба остатка от деления совпадают, то принимается решение, что ошибки в подсверхцикле отсутствуют. Если остатки не совпадают, то регистрируется наличие ошибки в подсверхцикле. Об этом оповещается противоположная сторона, путем установки одного бита Е в значение1 равное 1 для каждого ошибочного подсверхцикла.
Значения битов Е всегда учитываются, даже если подсверхцикл БМР, который их содержит, является ошибочным, так как маловероятно, что биты Е сами будут искажены. Задержка между определением ошибочного подсверхцикла и установкой бита Е, указывающего на наличие ошибки, должна быть менее 1 секунды.
Процедура СЯС-4, являясь удобным методом контроля ошибок в процессе мониторинга, не отменяет необходимости проведения измерений ВЕЯ, так как ошибка, обнаруженная с помощью СЯС-4 необязательно соответствует одной битовой ошибке. Несколько битовых ошибок в подсверхцикле могут дать одну ошибку СИ.С-4 для блока.
Измерения параметров канального уровня потока Е1. Измерения канального уровня систем передачи являются наиболее важными для их эксплуатации, поэтому именно к ним относится большинство стандартов на нормы каналов и трактов систем передачи.
Измерения канального уровня можно разделить на несколько групп: анализа кодовых ошибок; цикловой и сверхцикловой структуры; измерения битовых и блоковых ошибок; параметров аналоговых сигналов, передаваемых в потоке Е1.
Анализ цикловой и сверхцикловой структуры. Причинами возникновения сбоев в цикловой и сверхцикловой структурах могут быть:
— битовые ошибки, находящиеся в канальных интервалах КИО и КИ16;
— неисправная работа каналообразующего оборудования;
— некорректное формирование последовательностей FAS и MFAS.
Наличие единичных битовых ошибок в КИО и КИ16 компенсируется алгоритмами поддержания цикловой и сверхцикловой синхронизации. Вероятность появления битовых ошибок в КИО и КИ16 в нескольких последовательных циклах невелика и может иметь место, если параметр ошибки приближается к величине BER = 10-3, что свидетельствует о времени неготовности UAS тракта.
Неисправная работа каналообразующего оборудования приведет к появлению сигналов:
LOS (Loss of Signal) — потеря сигнала,
LOF (Loss of Frame) — потеря цикловой синхронизации,
AIS (Alarm Indication Signal) — сигнал индикации неисправности.
Правила генерации сигналов дефектов LOS и AIS определяются Рекомендацией G.775 и рассмотрены в гл. 2.
Измерения, связанные с цикловой и сверхцикловой структурой включают анализ сигналов FAS, MFAS и анализ ошибок по CRC-4, которые определяются Рекомендацией G.706. В большинстве приборов генерация ошибки FAS и MFAS производится при обнаружении ошибки в структуре этого сигнала без уточнения характера нарушения.
К сигналам о неисправности цикловой и сверхцикловой структуры относятся:
LOF (Loss of Frame) — потеря цикловой синхронизации.
CAS-LOM (Channel Associated Signalling-Loss of Multi Frame) — потеря сверхцикловой синхронизации.
CRC-LOM (Cyclic Redundancy Check — Loss of Multi Frame) — потеря сверхцикла CRC.
MAIS (Multi Frame Alarm Indication Signal) — сигнал индикации неисправности в сверхцикле.
MRAI (Multi Frame Remote Alarm Indication) — сигнал индикации неисправности в сверхцикле на удаленном конце.
Указанные сигналы несут полезную информацию о нарушениях цикловой и сверхцикловой структуры. Они используются в системе самодиагностики управления, а также могут генерироваться анализаторами потока El.
Параметр LOF регистрируется в следующих случаях: подряд принимаются 3 некорректных сигнала FAS и 3 сигнала NFAS, в которых бит 2 равен 0.
Сигнал FAS будет считаться восстановленным, если: в первом принимаемом цикле приходит корректный сигнал FAS,
во втором цикле на месте второго бита в КИО находится 1, а в третьем — присутствует корректный сигнал FAS.
Для того, чтобы избежать возможности регистрации сигнала FAS в тех циклах, где он не должен находиться, применяется следующая процедура. Если сигнал FAS определен в цикле N, то должна быть выполнена проверка двух условий: сигнал FAS отсутствует в следующем (N + 1) цикле и присутствует в цикле (N + 2). Несоблюдение одного или обоих этих требований может быть причиной новой проверки, инициированной в цикле (N + 2).
Сигнал CAS-LOM генерируется в случае приема двух последовательных MFAS с ошибкой. Сигнал CRC-LOM является сигналом о неисправности и генерируется в случае приема трех последовательных циклов с некорректным сигналом FAS или NFAS, а также, если обнаружены более чем 915 ошибок CRC в секунду. Сигнал MAIS генерируется в случае приема двух последовательных сверхциклов с количеством нулей менее 4-х. Сигнал MR AI генерируется в случае, если бит 6 в составе MFAS равен единице в двух последовательных сверхциклах.
Измерение битовых и блоковых ошибок. Нормы на параметры битовых и блоковых ошибок приведены в гл. 1, где рассмотрены основные положения Рекомендаций G.821, G.826 для долговременного нормирования, и гл. 2, где рассмотрены положения Рекомендаций М.2100/М.2101.1 для проведения экспресс-измерений.
Приказ № 92 Министерства связи РФ обобщил все три указанных документа и в настоящее время является единственным документом для паспортизации каналов и трактов первичной сети Министерства связи России. Этот приказ охватывает весь диапазон скоростей иерархии PDH. Все нормы разбиты на две группы: долговременные и оперативные, как показано на рис. 3.12. Долговременные нормы, в свою очередь, рассмотрены для каналов ОЦК (в соответствии с Рекомендацией 0.821) и для сетевых трактов (Рекомендация 0.826). Оперативные нормы соответствуют Рекомендации М.2100.
Рис. 3.12. Группы параметров трактов
В приказе помимо норм приведены методики расчета параметров каналов и трактов, исходя из особенностей структуры первичной сети Министерства связи России, т.е. деления ее на магистральную, внутризоновую, местную и абонентскую сети с соответствующими этому делению коэффициентами, учитывающими протяженность трактов.
Кроме норм на параметры ошибки, в документе нашли отражения нормы на фазовое дрожание в соответствии с Рекомендациями 0.171,0.823, 0.825.
Измерение параметров аналоговых сигналов. Эти измерения характерны только для систем передачи Е1, так как только в них осуществляется преобразование аналогового сигнала в цифровой. При эксплуатации тракта Е1 возникает задача оценки качества передачи по аналоговому каналу. Проведение измерений по всему перечню параметров, предусмотренных Приказом № 43 МС России от 15.04.96 «Нормы на электрические параметры каналов тональной частоты магистральной и внутризоновых первичных сетей» не оправдано на цифровой сети, поэтому производится только оценка аналоговой части тракта. При проведении измерений источником сигнала является генератор синусоидального сигнала, а приемником — анализатор потока, который восстанавливает из цифровой последовательности аналоговый сигнал и проводит анализ его параметров (см. рис. 3.3, а). Измерениям подлежат следующие параметры: частота сигнала, уровень тестового сигнала, уровень шума, соотношение сигнал/шум.
Измерение последних двух параметров реализовано не во всех современных анализаторах потока. Возможен и другой способ измерений: анализатор потока создает цифровой эквивалент синусоидального сигнала и вводит его в заданный канальный интервал внутри потока Е1 (рис. 3.3, б). Анализатор позволяет регистрировать: измеренное положительное пиковое значение амплитуды синусоидального сигнала в восьмиразрядном коде, смещение синусоидального сигнала относительно нулевого значения, измеренное отрицательное пиковое значение амплитуды синусоидального сигнала в восьмиразрядном коде.
⇐Физический уровень тракта Е1 | Измерения в цифровых системах передачи | Сетевой уровень потока Е1⇒
Главная → Каталог статей → Технологии связи → SDH
Канал Е1
Канал Е1 — первичный канал иерархии PDH — является основным каналом, используемым во вторичных сетях телефонии, передачи данных и ISDN. По сравнению с остальными каналами иерархии PDH этот канал имеет несколько особенностей, связанных с его использованием, а именно сверхцикловую структуру и канал сигнализации, используемый во вторичных сетях цифровой телефонии и ISDN.
Остальные каналы иерархии PDH имеют только цикловую структуру. Такое отличие канала Е1 обусловлено его функцией в современной первичной сети — канал Е1 обычно является «пограничным» каналом между первичной и вторичными сетями. Структура систем передачи Е1 включают три уровня эталонной модели OSI: физический, канальный и сетевой. Физический уровень описывает электрический интерфейс потока Е1, а также параметры сигнала Е1.
Канальный уровень описывает процедуры мультиплексирования и демультиплексирования каналов более низкого уровня иерархии (ОЦК 64 кбит/с и каналов ТЧ) в поток Е1, цикловую и сверхцикловую структуру потока Е1, встроенные процедуры контроля ошибок и т.д. Наконец, сетевой уровень описывает процедуры управления каналами Е1 в первичной сети, а также контроль параметров ошибок на сетевом уровне. Этот уровень является относительно неполным и включает всего лишь несколько процедур. Основным же для рассмотрения систем передачи Е1 является структура канального уровня. Рассмотрим более подробно структуру каждого из трех уровней систем Е1.
Физический уровень Е1
Физический уровень Е1 включает в себя описание электрических параметров интерфейсов Е1 и параметров сигналов передачи, включая структуру линейного кода. Рассмотрим наиболее важные эксплуатационные параметры физического уровня Е1.
Основные характеристики интерфейса Е1. Тип линейного кодирования.
Согласно основные характеристики интерфейса следующие:
• Скорость передачи — 2048 кбит/с ± 50 ppm (1 ppm (point per million) = 10-6), таким образом, допускается отклонение частоты передаваемого сигнала (2048 кГц) ± 102,4 Гц
• Используемые типы кодирования: HDB3 (стандартизирован ), либо AMI. Использование кода AMI в настоящее время уже не рекомендуется, однако ряд старых цифровых систем передачи могут использовать этот код.
AMI
Это наиболее простой формат линейного кодирования. AMI расшифровывается как инверсия альтернативного бита. Этот формат использует инверсию каждой следующей 1 (смотрите рис). В большинстве случаев AMI не используется, поскольку этот формат линейного кодирования приводит к частым потерям синхронизации в случае длинных последовательностей нулей.
HDB3
Формат линейного кодирования HDB3 был специально разработан для решения проблем синхронизации, возникающих в случае использования AMI. В формате HDB3 за последовательностью из четырех последовательных нулей следует двухимпульсная вставка «плюс импульс-минус импульс». Оборудование на удаленном конце принимает поток Е1 и заменяет двухимпульсные вставки на последовательность нулей, восстанавливая исходную последовательность данных. Таким образом, код HDB3 обеспечивает большую плотность импульсов в потоке, что дает лучшие параметры синхронизации по принимаемому сигналу. На рис. в качестве примера приведено кодирование по HDB3 последовательности 1000 0000.
Существуют определенные правила таких вставок. Тип вставки определяется полярностью последнего инвертированного бита и количеством битов последовательности предыдущей вставки. Если это количество четное, вставляется 000V; при этом полярность V такая же, как и непосредственно предшествовавшего импульса. Если количество битов нечетно, то вставка имеет вид B00V, где полярность В — противоположная предыдущему импульсу, а полярность V такая же, как и В. На рис. 2.3. представлен алгоритм вставки импульса в последовательность 0 кода HDB3.
Уровни сигналов, электрические параметры интерфейса, форма импульса.
Помимо параметров частоты сигнала и типа линейного кодирования стандарт определяет следующие нормы на электрические параметры интерфейса (смотрите таблицу).
Нормы на электрические параметры интерфейса Е1
Форма импульса электрического сигнала В соответствии с рисунком «V» определяется значением номинальной пиковой амплитуды импульса.
Тип пары в каждом направлении Одна коаксиальная пара Одна симметричная пара
Импеданс 75 Ом 120 Ом
Номинальное пиковое напряжение импульса 2.37 В 3 В
Пиковое напряжение при отсутствии импульса 0 ± 0.237 В 0 ± 0.3 В
Номинальная ширина импульса 244
Отношение амплитуд положительного и отрицательного импульсов в середине импульсного интервала от 0.95 до 1.05
Отношение ширины положительного и отрицательного импульсов с середине номинальной амплитуды. от 0.95 до 1.05
Как видно из таблицы, существуют два стандарта на параметры физического интерфейса Е1: симметричный интерфейс на 120 Ом и коаксиальный (несимметричный) интерфейс 75 Ом. Им соответствую значения пикового напряжения в 3 В и 2,37В. Следует отметить, что оба типа интерфейсов могут реально встретиться в отечественной практике. Симметричный интерфейс 120 Ом получил наибольшее распространение в Европе и является официальным стандартом для России. Интерфейс 75 Ом получил широкое распространение на американо-канадском рынке. В России этот интерфейс не рекомендован к применению, тем не менее в практике эксплуатации оборудования цифровых систем передачи американских и канадских фирм-производителей он может встретиться.
Таким образом, типичный уровень сигнала импульсов потока Е1 с импедансом интерфейса 75 Ом или ± 2.37 В (для сигнала бинарной 1) или 0 В (для 0), а для симметричного интерфейса 120 Ом — ±3В (для сигнала бинарной 1) или 0 В (для 0). Реальный сигнал обычно находится в пределах ±10% от этой величины. В идеальном случае передаваемый импульс является совершенно симметричным. Однако в реальной практике импульс сильно трансформируется при его генерации и передаче по каналу Е1. На рисунке форма идеального импульса и реального импульса, который передается по каналу Е1.
Канальный уровень Е1
Параметры канального уровня потока Е1 включают в себя цикловую и сверхцикловую структуру потока, описание процедур контроля ошибок по цикловому избыточному коду (CRC), а также описание процедур мультиплексирования и демультиплексирования каналов ТЧ в поток Е1. Последние включают в себя процедуры дискретизации, квантования и компандирования аналогового сигнала, описанные во всех учебниках по современным средствам связи и ниже описываться не будут. Рассмотрим цикловую структуру потока Е1 и встроенные процедуры контроля ошибок.
Цикловая и сверхцикловая структура Е1
При передачи по первичной сети цифровой поток преобразуется в блоки стандартной логической структуры — циклы. Цикловая структура обеспечивает работу процедур мультиплексирования и демультиплексирования, передачу управляющей информации, а также встроенную диагностику по параметру ошибок в цифровой системе передачи. Существует три основных варианта цикловой структуры Е1: неструктурированный поток, с цикловой структурой и с цикловой и сверхцикловой структурой.
Неструктурированный поток Е1 используется в сетях передачи данных и не имеет цикловой структуры, т.е. разделения на каналы (обычно это мультиплексирование каналов ОЦК — 64 кбит/с).
Поток Е1 с цикловой структурой предусматривает разделение на 32 канала ОЦК по 64 кбит/с в форме разделения на канальные интервалы (Time Slot — TS) от 0 до 31. Цикловая структура описана в. Для каждого канального интервала в составе цикла отводится 8 битов, таким образом длина цикла равна 256 битов, что при заданной скорости передачи Е1 составляет 125 мкс (длительность одного цикла). Нулевой канальный интервал отводится под передачу сигнала цикловой синхронизации FAS (Frame Alignment Signal).
Структура цикла FAS представлена на рисунке ниже. Различаются четные и нечетные циклы. В TS0 нечетных циклов передается сигнал FAS (на рисунке — первая строчка), который включает в себя последовательность цикловой синхронизации 0011011 и один служебный бит, зарезервированный под задачи международного использования. В TS0 четных циклов передается сигнал NFAS, не содержащий кодовую последовательность цикловой синхронизации.
Первая строка содержит сигнал FAS
Вторая строка содержит сигнал NFAS
Sn = биты, зарезервированные под задачи национального использования
Si = биты, зарезервированные под задачи международного использования
Последовательность FAS = 0011011
В составе сигнала NFAS передается бит Si, зарезервированный под задачи международного использования, бит А, используемый для передачи сигналов о неисправностях, а также пять служебных битов Sn4, Sn5, Sn6, Sn7, Sn8,используемые для передачи сигналов сетевого управления первичной сети Е1, диагностики и дополнительных процедур контроля ошибок.
В отечественной терминологии вариант потока Е1 с цикловой структурой получил название ИКМ-31. Он используется в ряде систем передачи данных, а также в некоторых приложения ОКС7, ISDN и B-ISDN. В ряде случаев аппаратура передачи/приема Е1 использует еще и шестнадцатый канальный интервал (TS-16) для передачи информации о сигнализации, связанной с разговорным каналом (сигнализации CAS).
В этом случае поток Е1 имеет дополнительно к цикловой структуре еще и сверхцикловую структуру (MFAS — Multi Frame Alignment Signal). В отечественной терминологии такой вариант цикловой структуры Е1 получил название ИКМ-30. При этом 16 циклов объединяются в сверхцикл размера 4096 битов и длительностью 2 мс. Когда идет передача/прием информации в виде сверхциклов MFAS, индивидуальная информация FAS каждого цикла теряет значимость. Необходимо рассматривать всю информацию FAS — 16 циклов.
Первый цикл содержит информацию MFAS о сверхцикле в шестнадцатом канальном интервале, а остальные 15 интервалов используются для передачи сигнальной информации. Структура MFAS показана на рисунке.
Сигнал MFAS=0000XYXX
X- запасные биты (1 обычно не используется)
Y- удаленная неисправность MFAS ( равно 1 в случае, если потеряна сверхцикловая синхронизация)
Процедуры контроля ошибок передачи. Использование избыточного кода CRC-4
Передача потока Е1 с цикловой структурой ИКМ-30 имеет важный механизм — процедуру встроенной диагностики параметров ошибки. Для этой цели используется биты Si в составе циклового заголовка FAS и NFAS.
Процедура использует сверхцикловую структуру 16 циклов, как показано на рис. 2.8 и механизм расчета параметра ошибки по контрольному избыточному коду CRC-4 (полином X(4)+X+1).
Принцип CRC-4 базируется на простом математическом расчете, производимом в каждом сверхцикле данных. Оборудование передачи Е1 производит расчет суммы CRC-4 и включает результаты суммы в сигнал следующего сверхцикла. Оборудование приемника принимает сигнал и производит аналогичный расчет и сравнение полученной суммы и переданной в следующем сверхцикле. Если в двух полученных суммах имеется расхождение, генерируется сигнал ошибки CRC-4. В настоящее время в линейное оборудование и системы самодиагностики цифровых каналов ИКМ встраивается функция анализа по CRC-4. Часто возникает вопрос о целесообразности проведения анализа по BER, если система и так анализирует параметр ошибки по CRC-4.
Отвечая на этот вопрос, необходимо учесть два основных принципа использования CRC-4. Во-первых, каждая ошибка CRC-4 не обязательно связана с ошибкой одного бита информации. Несколько битовых ошибок в одном сверхцикле дадут только одну ошибку CRC-4 для блока. Во-вторых, несколько битовых ошибок могут компенсировать друг друга в смысле значения суммы CRC-4. CRC-4 является удобным методом контроля ошибок в процессе сервисного мониторинга при работающем канале, когда практически невозможно измерить реальные параметры ошибок по битам, поскольку невозможно добиться синхронизации тестовой последовательности. Тем не менее в режиме с отключением канала необходимо проводить измерения ошибок по битам, поскольку результаты таких измерений более точны.
Рассмотрим механизм передачи информации о CRC-4. Для передачи этой информации используется сверхцикловая структура. Однако, сверхцикл CRC-4 не обязательно связан со сверхциклом MFAS. Каждый сверхцикл может быть разбит на 2 подцикла (SMF). На рисунке ниже они отмечены как SMF#1 и SMF#2 и содержат по 8 циклов каждый. Соответственно отмечены по 4 бита, используемые для передачи CRC-4 каждого сверхцикла (биты С). Биты CRC-4 вычисляются методом деления двоичной суммы содержания 8 последовательных циклов на тестовый полином, остаток от деления в виде 4-битового сообщения вставляется в следующий сверхцикл для передачи в потоке Е1.
Структура сверхцикла CRC-4 включает несколько сообщений сверхцикловой структуры CRC-4. В четных циклах NFAS битами Si передается сообщение сверхцикловой синхронизации CRC-4 — комбинация 001011, которая используется на приемной стороне для синхронизации по CRC. Кроме этого в составе сверхцикла SMF, передается его главная информация — сообщение C1C2C3C4. В качестве дополнительного сообщения, передаваемого в направлении передачи при обнаружении ошибки по CRC-4, используется 2-битовое сообщение Е1Е2. Каждый бит Е связан с одним из принятых сверхциклов SMF (в составе сверхцикла MFAS используется два сверхцикла SMF, поэтому сообщение использует два бита Е). Когда оборудование приемника получает информацию об ошибке CRC-4, оно генерирует бит Е для сообщения передатчику о принятой ошибке. Мониторинг по CRC производится в режиме реального времени непосредственно после установления циклового синхронизма. В этом случае возникает цикловая синхронизация по CRC-4 и сверхциклам SMF по кодовой последовательности 001011. Эта синхронизация достаточно устойчивая, потеря цикловой синхронизации по CRC-4 отображается только после того, как более чем 914 сообщений CRC в секунду не соответствует ожидаемым значениям.
Сетевой уровень Е1
Стандартизация систем передачи Е1 охватывает также третий, сетевой уровень, где осуществляются процедуры управления первичной сетью. При работе процедур управления, они широко используют сигналы о неисправностях, генерируемые в современных цифровых системах передачи, а также сигналы о возникновении ошибок, фиксируемые встроенными средствами диагностики. Эта информация собирается в узлах системы управления и обрабатывается. Таким образом, сетевой уровень Е1 включает в себя набор определенных служебных сигналов и сообщений, используемых системой управления первичной сетью. Такие сообщения делятся на три категории:
• сообщения о возникновении ошибок в системе передачи;
• сообщения о неисправностях, возникающих в системе передачи;
• сообщения, используемые для реконфигурации первичной сети и восстановлении плана синхронизации.
Последняя категория сообщений сетевого уровня Е1, получивших название сообщений SSM (System Synchronization Messages — сообщения в системах синхронизации), будет отдельно рассматриваться в главе, посвященной проблемам построения и эксплуатации современных систем синхронизации. Здесь же мы рассмотрим первые две категории сообщений.
Сообщения о возникновении ошибок в системе передачи Е1 использует сообщения E1E2. Действительно, сообщения, передаваемые битами Е, служат подтверждением возникновения блоковой ошибки CRC и могут служить критерием качества цифровой системы передачи. Система управления анализирует значения битов Е и собирает информацию о возникающих в системе передачи Е1 ошибках.
Сообщения о неисправностях в системе передачи передаются в циклах NFAS, а также битами MFAS в случае, если поток Е1 имеет сверхцикловую структуру. Как было описано в предыдущем разделе, в состав четных циклов NFAS входят биты, зарезервированные под задачи национального использования — бит А и биты Sn4, Sn5, Sn6, Sn7, Sn8. Именно эти биты используются для передачи различных сообщений о неисправностях в цифровой систем передачи. Биты Sn образуют своего рода канал управления, ресурсы которого используются сетевым уровнем Е1. Помимо битов Sn для передачи сообщений о неисправностях могут использоваться биты XXYX MFAS.
Эти биты используются главным образом для передачи сигналов о неисправностях в сверхцикловой структуре Е1 (так бит Y непосредственно и определяется как индикатор неисправности MFAS на удаленном конце). Бит А (иногда он называется также Sn3) представляет собой бит оперативного сигнала о неисправности. В случае возникновения существенной неисправности, требующей оперативного вмешательства, бит А становится равным единице. Такую существенную неисправность называют RDI (Remote Defect Indication — Индикация дефекта на удаленном конце).
В случае возникновения так называемого «не оперативного» сигнала неисправности, система передачи генерирует NFAS с инверсией бита Sn4 с 0 на 1. Рекомендации ITU-T устанавливают следующие возможные причины генерации такого сигнала:
• В случае, если параметр ошибки BER в FAS становится хуже, чем 10(-3)
• В случае неисправности в цепи питания кодека
• В случае, если потерян входной сигнал или имеет место сбой цикловой синхронизации
Неоперативный сигнал о неисправности дает возможность получения информации о значительном увеличении параметра ошибки на стороне передатчика. Оборудования приемника обычно имеет установленные пороговые значения для генерации сигнала Sn4. В случае увеличения параметра ошибки более порога приемник генерирует сигнал «неоперативной» неисправности в направлении передатчика. При получении этого сигнала система управления может перевести передачу на резервный канал Е1, за счет чего достигается высокое качество связи.
Биты Sn5, Sn6, Sn7, Sn8 образуют служебный канал передачи данных емкостью 2 кбит/с, который может использоваться для передачи сигналов о неисправностях. В последнее время в связи с развитием систем управления (в частности платформы TMN) возможности этого канала используется довольно широко. Речь здесь идет именно о канале, поскольку в этом случае важно не абсолютное значение битов Sn, а последовательность сигналов, генерируемых в этих битах. Каждый бит образует так называемый «вертикальный протокол», т. е. сообщение о неисправности передается не одним, а несколькими последовательными битами Sn.
Тип передаваемых сообщений и алгоритм их генерации устанавливается национальными стандартами, производителями оборудования или специальными требованиями (например, операторов ведомственных сетей). Наибольшее распространение получил стандарт ETS 300-233, определяющий использование битов Sn в мультиплексорах PRI ISDN. Генерируемые и принимаемые оборудованием сообщения могут успешно использоваться системами управления, которые работают на принципах анализа именно этих сообщений. Таким образом, сообщения о неисправностях представляют собой базу для создаваемых систем управления, их количество непосредственно определяет максимальный уровень интеллектуальности системы управления и перечень параметров, доступных для контроля сети.
Просмотров: 22315 |
Дата: 2023-09-21 |
Добавил
: Dima
|
Автор
: Дмитрий
Добавлять комментарии могут только зарегистрированные пользователи.
[
Регистрация
|
Вход
]
6.1. Определения коэффициента ошибок
6.2. Математическое выражение коэффициента битовых ошибок
6.3. Нормы на параметры ошибок систем передачи
6.4. Принципы построения измерителей ошибок
6.5. Техника измерения коэффициента ошибок
6.1. Определения коэффициента ошибок
Коэффициент ошибок – важнейшая характеристика линейного тракта. Он измеряется как для отдельных участков регенерации, так и для тракта в целом. Определяется коэффициент ошибок kОШ, по формуле:
kОШ = NОШ /N, (6.1)
где N – общее число символов, переданных за интервал измерения; NОШ – число ошибочно принятых символов за интервал измерения.
Измерение коэффициента ошибок носит статистический характер, так как получаемый за конечное время результат является случайной величиной. Относительную погрешность измерения в случае нормального закона распределения числа ошибок, что допустимо при N≥10, можно определить по формуле:
 . (6.2)
. (6.2)
Здесь ![]() — коэффициент, зависящий от доверительной вероятности результата измерений:
— коэффициент, зависящий от доверительной вероятности результата измерений:
![]() , (6.3)
, (6.3)
где ![]() — обратная функция интеграла вероятности
— обратная функция интеграла вероятности ![]() :
:
![]() . (6.4)
. (6.4)
Значение kОШ позволяет оценивать вероятность ошибки pОШ – количественную оценку помехоустойчивости. Область возможных значений оценки, в которой с заданной доверительной вероятностью будет находиться значение pОШ, определяется верхней (pВ) и нижней (pН) доверительными границами. При нормальном законе распределения числа ошибок значения pВ и pН определяются по формулам:
![]() , (6.5)
, (6.5)
![]() , (6.6)
, (6.6)
Очевидно, что точность оценок вероятности ошибки и коэффициента ошибки растет с увеличением N. Общее число символов цифрового сигнала, переданных за интервал измерения T, зависит от скорости передачи B: N = TB. Отсюда следует, что чем больше скорость передачи, тем быстрее и точнее можно оценить коэффициент ошибок.
6.2. Математическое выражение коэффициента битовых ошибок
Определим коэффициент битовых ошибок для реальных приёмников, которым свойственно наличие различных источников шумов. При этом будем считать, что приёмник принимает решение, какой бит (0 или 1) был передан в каждом битовом интервале путем стробирования фототока. Очевидно, что из-за наличия шумов данное решение может быть неверным, что приводит к появлению ошибочных битов. Поэтому, чтобы определить коэффициент битовых ошибок, необходимо понять, каким образом приемник принимает решение относительно переданного бита.
Обозначим через I1 и I0 фототоки, стробированные приемником в течение 1 и 0 битов, соответственно, а через s12 и s02 соответствующие шумы. Принимая, что последние имеют гауссовское распределение, проблема установления истинного значения принятого бита имеет следующую математическую формулировку. Фототок для битов 1 и 0 является выборкой гауссовской переменной со средним значением I1 и вариацией s1, а приёмник должен отслеживать этот сигнал и решать, является ли переданный бит 0 или 1. При этом существует много возможных правил принятия решения, которые могут быть реализованы в приёмнике с целью минимизации коэффициента битовых ошибок. Для значения фототока I этим оптимальным решением является наиболее вероятное значение переданного бита, которое определяется путём сравнения текущего значения фототока с пороговым значением Iп, используемым для принятия решения.
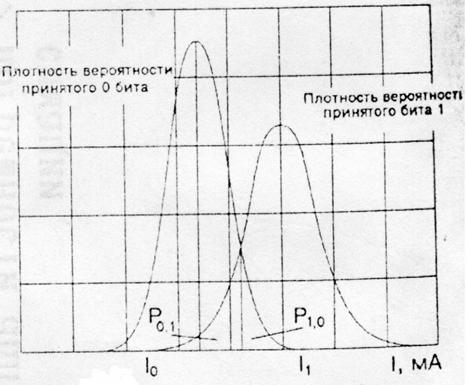
Рисунок 6.1. Функция плотности вероятности фототока принятых сигналов
Пусть при I ³ Iп принимается решение о том, что был передан бит 1, в противном случае – бит 0. Когда биты 1 и 0 равновероятны, что и рассматривается в дальнейшем, пороговый ток приблизительно равен:
![]() (6.7)
(6.7)
Геометрически Iп представляет собой значение тока I, для которого две кривые плотности вероятностей (рис. 6.1) пересекаются.
Вероятность того, что I < Iп, т. е. вероятность ошибки при передаче бита 1, обозначим через Р0,1, а вероятность решения для переданного бита 1, когда I ³ Iп при переданном 0, обозначим Р1,0.
Пусть Q(х) обозначает вероятность того, что нулевая средняя вариация гауссовской переменной превышает значение х, тогда:
 (6.8)
(6.8)
а
 (6.9)
(6.9)
а
 (6.10)
(6.10)
Можно показать [14], что BER определяется,
 (6.11)
(6.11)
Очень важно отметить, что в ряде случаев эффективным является использование изменяемого в зависимости от уровня сигнала порога принятия решения, как, например, шума оптического усилителя. Многие высокоскоростные приёмники обладают такой особенностью. Однако более простые приемники имеют порог, соответствующий среднему уровню принимаемого тока, а именно (I1 + I0)/2. Такая настройка порогового значения дает большой коэффициент битовых ошибок, определяемый выражением [14].
 (6.12)
(6.12)
Выражение (6.11) можно использовать для оценки BER, когда известны как мощность полученного сигнала, соответствующего битам 0 и 1, так и статистика шумов.
6.3. Нормы на параметры ошибок систем передачи
Битовые ошибки являются основным источником ухудшения качества связи, проявляющегося в искажении речи в телефонных каналах, недостоверности передачи информации или снижении пропускной способности передачи данных, и характеризуются статистическими параметрами и нормами на них, которые определены соответствующей вероятностью выполнения этих норм. Последние делятся на долговременные и оперативные нормы, первые из которых определяются рекомендациями ITU-T G.821 и G.826, а вторые – М.2100, М.2110 и М.2120, при этом, согласно М.2100, качество цифрового тракта по критерию ошибок делят на три категории:
- нормальное – BER < 10-6;
- пониженное – 10-6 ≤ BER < 10-3 (предаварийное состояние);
- неприемлемое – BER ≥ 10-3 (аварийное состояние).
Так как появление ошибок является следствием совокупности всех текущих условий передачи цифровых сигналов, имеющих случайный характер, то при отсутствии данных о законе распределения ошибок его отдельные элементы могут быть определены с определенной степенью достоверности только по результатам продолжительных измерений. В то же время на практике необходимо, чтобы значения параметров ошибок для ввода в эксплуатацию и технического обслуживания систем передачи основывались на достаточно коротких интервалах времени измерения. Исходя из этого, были определены следующие параметры ошибок [14]:
- секунда с ошибками (error second, ES) – односекундный интервал, содержащий хотя бы один ошибочный бит;
- секунда, пораженная ошибками (severely error second, SES) – односекундный интервал с BER ≥ 10-3.
Данные параметры ошибок должны оцениваться в течение времени готовности (available time), отсчет которого начинается с первой секунды из десяти следующих друг за другом секунд, в каждой из которых BER<10-3. ITU-T M.2100 регламентирует нормы качества (performance objectives, PO) на выраженные максимальным процентом времени параметры ошибок, которые зависят только от скорости передачи и приводятся для условного эталонного соединения (hypothetical reference connection, HRC/HRX/) длиной 27500 км. При этом нормы качества распределяются по участкам соединения соответствующей категории качества. В качестве эталонной модели такого распределения принимается участок высокой категории качества протяженностью 25000 км, которому присваивается 40% от общей нормы качества на параметры ошибок передачи точка-точка, что в пересчете на 1 км, дает 0.0016 %/км.. Остальные 4 участка (2 среднего качества и 2 с приемлемым качеством) длиной 2 х 1250 км расположены по обе стороны от центрального. Поэтому распределение, пропорциональное протяженности L км тракта высокой категории качества, будет определяться, как
AL = 0.0016 · L %/км. (6.13)
Нормы качества на цифровые тракты и каналы подразделяются на настроечные и эксплуатационные, причем вводимые в эксплуатацию впервые или после проведения корректирующих действий они должны сдаваться по настроечным нормам качества, а в процессе эксплуатации должны соответствовать эксплуатационным нормам. Обычно [105] эксплуатационная норма представляется в виде эталонной нормы качества (reference performance objective, RPO)
RPO = A · T · PO, (6.14)
а настроечная, включающая запас на старение, используемая при вводе в эксплуатацию (bringing into service objective, BISO), определяется, как половина RPO, т.е.
BISO = RPO/2. (6.15)
Здесь PO – норма качества оцениваемого параметра, а T = 86400 с (одни сутки) – продолжительность измерений (количество односекундных интервалов).
Для анализа результатов, полученных в процессе измерений, используются также предельные значения S1и S2 норм (рисунок 6.2), которые соответствуют числу событий (ES,SES) и определяются, как:
S1 = RPO/2 – D и S2 = RPO/2 + D, (6.16)
где D = 2![]() — дисперсия оцениваемого параметра.
— дисперсия оцениваемого параметра.
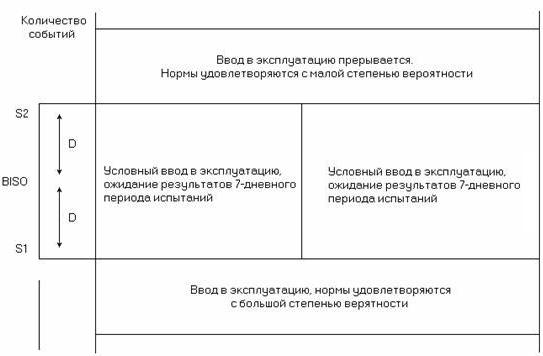
Рисунок 6.2. Предельные значения и условия ввода в эксплуатацию системы передачи
При соответствии результатов измерений норме S1 цифровой тракт может быть введен в эксплуатацию без всякого сомнения, а при превышении нормы S2 в обязательном порядке требуется повышение качества испытываемого цифрового тракта, т.е. должны быть проведены корректирующие действия с повторными измерениями. Если значение ES или SES лежит в интервале от S1 до S2, цифровой тракт может быть введен в эксплуатацию условно или временно с продолжением измерений в течение 7 суток. Данный подход к оценке качества цифровых систем передачи по параметрам ошибок позволяет сократить время измерений и получить норму цифрового тракта суммированием норм цифровых участков. При этом значения RPO, D, S1 и S2 выражаются в виде числа событий за установленный интервал времени, а не в виде процентов времени.
Для измерения коэффициента ошибок разработан ряд специальных BER анализаторов – измерителей коэффициента ошибок, включающих генераторы псевдослучайных и детерминированных последовательностей передаваемых кодированных символов, а также приемное оборудование, осуществляющее собственно измерение коэффициента ошибок. В случае посимвольного сравнения кодов измерение может быть выполнено с использованием шлейфа, т.е. путем измерения ошибок с одной оконечной станции при установке на противоположном конце шлейфа. Другой метод основан на выделении ошибок благодаря избыточности используемых кодов и используется для измерений от передающей до приемной сторон тракта или участка линии, т.е. когда выделение и фиксация ошибок производятся на ее приемном конце. Очевидно, что в первом случае требуется использование одного комплекта, а во втором – двух комплектов приборов. При этом измеренное значение коэффициента ошибок отражает качество передачи при прохождении сигнала в обоих направлениях и в каждом направлении соответственно.
6.4. Принципы построения измерителей ошибок
В зависимости от скорости передачи контролируемой системы передачи в анализаторе используются различные схемотехнические решения.
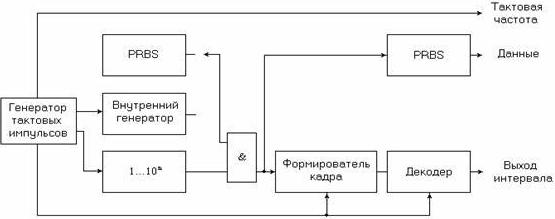
Рисунок 6.3. Генератор низкоскоростного BER анализатора
Низкоскоростной генератор тестовых кодов и детектор ошибок. Используемый в телекоммуникациях анализатор BER, состоящий [106] из генератора тестовых кодов и собственно анализатора ошибок, представлен на рисунках 6.3 и 6.4. Он предназначен для невысоких (до 200 Мбит/с) битовых скоростей, учитывая, что максимальные типовые скорости составляют 44.736 Мбит/с (DS3) в Северной Америке и 139.364 Мбит/с – за пределами Северной Америки.
PRBS с генератором кодовых групп, представленный на рис. 6.16, синхронизируется либо от источника тактового сигнала с фиксированной частотой (согласно G.703), либо от синтезатора, осуществляя тем самым изменение частоты синхронизации. В связи с этим использование данных средств требует задания некоторых определенных частот синхронизации и наличия возможности обеспечения их небольших смещений от ±15 до ±50 ppm. Для повторения тестовых кодов схема PRBS и генератор кодовых групп обычно имеют триггерную схему, управляющую либо выходным усилителем бинарных данных, который обеспечивает данные и данные с сопровождающим синхросигналом, либо выходную схему кодированных данных. Это позволяет создавать цикловую синхронизацию сигнала в соответствии с требованием, например, системы SONET/SDH. Кроме этого, данная схема способствует созданию соответствующего интерфейсного кода для эффективного восстановления тактовой синхронизации. Выходной усилитель обеспечивает необходимый уровень сигнала в соответствии со спецификацией электрического интерфейса, в том числе сигнала с чередованием полярности импульсов.
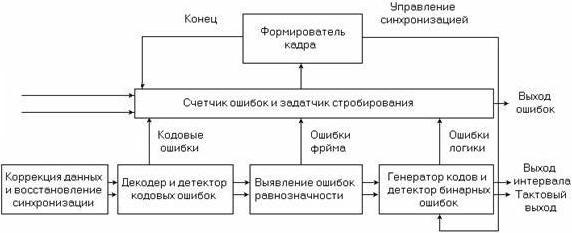
Рисунок 6.4. Низкоскоростной детектор ошибок
Детектор ошибок, показанный на рисунке 6.4, получает стандартный кодированный сигнал, восстанавливает генератор синхросигнала и устраняет кодирование для обеспечения бинарной даты и синхросигналов. Он обнаруживает любые нарушения алгоритма интерфейсного кода и посылает сигналы на счетчик ошибок, что составляет первый уровень процесса обнаружения ошибок. При работе с цикловыми сигналами приемник захватывает любой присутствующий элемент цикловой синхронизации, проверяет наличие цикловых ошибок и декодирует любые встроенные сигналы тревоги, или CRC биты, тем самым обеспечивая возможность измерения.
Наконец, бинарные данные и синхросигнал направляются на детектор ошибок и генератор эталонных тестовых кодов, которые проверяют полученный тестовый код бит за битом на предмет обнаружения логических ошибок. Временная база контролирует пропускание измерения для непрерывного, периодического и ручного режима. Накопленное количество ошибок обрабатывается для получения значения BER и анализа функционирования при наличии ошибок.
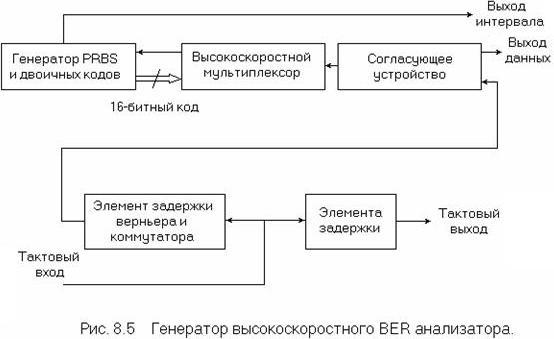
Высокоскоростной генератор тестовых кодов и детектор ошибок. На рисунках 6.5 и 6.6 показаны схемы [14] для 3 Гбит/с генератора тестовых кодов и детектора ошибок. Вследствие высокой битовой скорости генерация последовательных PRBS и кодовых групп на этой скорости не представляется целесообразной. Поэтому тестовые коды генерируются (рисунок 6.5) как параллельные 16-битные кодовые группы при максимальной скорости 200 Мбит/с, используя затем выполненные по биполярной технологии регистраторы смещения и высокоемкостную память. Высокоскоростные схемы обычно выполняются на основе арсенид-галлиевых логических схем, преобразующих параллельные данные в последовательный поток на скорости до 3 Гбит/с.
Согласно данной схеме, вход синхросигнала генерируется синтезатором частоты, согласующее устройство управляется через линию фиксированной задержки, а генератор тестовых кодов и выходной усилитель синхронизируются через схему дискретной и плавно изменяемой задержки, так что фаза синхросигнала/данных может изменяться как в положительном направлении, так и в отрицательном. Дискретные значения задержки составляют 250, 500 и 1000 пс, тогда как диапазон плавной задержки лежит в пределах от 0 до 250 пс с 1 пс инкрементом.
Корректор временной диаграммы, связанный с выходным усилителем, пересинхронизирует данные через триггер D типа для поддержания минимального фазового дрожания. Так как подобный тип тестового устройства обычно используется при проведении лабораторных измерений, выходные уровни синхросигнала и данных и постоянные смещения могут варьироваться для того или иного конкретного случая использования.
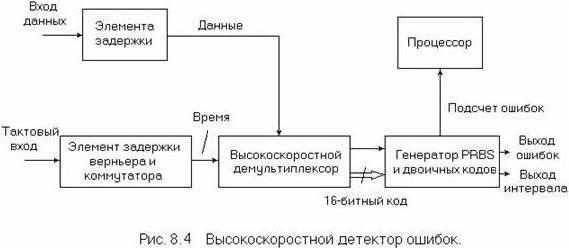
Детектор ошибок, показанный на рис. 6.6, имеет простое параллельное соединение, в связи с чем входы синхросигнала и данных проходят через схемы дискретной и плавной задержки, обеспечивая оптимальную настройку при обнаружении ошибок для любой фазы синхросигнала/данных. Действительно, путем настройки под контролем внутреннего процессора решающего порога и фазы синхросигнала условия функционирования детектора ошибок могут быть оптимизированы автоматически. Высокоскоростной демультиплексор преобразует последовательный поток данных в 16-битные параллельные кодовые группы наряду с поделенным на 16 синхросигналом. Параллельно соединенный генератор эталонных тестовых кодов синхронизируется с входными данными и осуществляет сравнение битов, поэтому любая ошибка фиксируется одним из двух счетчиков, первый из которых подсчитывает число ошибок, а второй – общее число битов. Процессор измерения обеспечивает анализ функционирования при наличии ошибок с разрешением до 1 мс.
6.5. Техника измерения коэффициента ошибок
Рассмотрим измерение коэффициента ошибок путем посимвольного сравнения и подсчета ошибочно принятых элементарных импульсов. Для этого вначале (перед измерением) на передающей станции с помощью оптического аттенюатора устанавливают заданный в технических условиях на аппаратуру линейного тракта уровень оптического излучения. Затем на передающем конце подключают генератор испытательных сигналов, а на приемном – измеритель коэффициента ошибок и, изменяя значения уровней средней мощности, измеряют коэффициент ошибок. Время измерения определяют в зависимости от скорости передачи, объема информации и значений коэффициента ошибок Кошi (BERi).
Коэффициент ошибок при заданном уровне оптического излучения вычисляют по формуле [14]
![]() (6.17)
(6.17)
где
![]() ,
,  , (6.18)
, (6.18)
где ![]() и
и ![]() — погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
— погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.

Не все сетевые инженеры понимают влияние ошибок интерфейса на производительность сетей, базирующихся на протоколе TCP. И хотя это может не быть интуитивно понятно с первого взгляда, ошибки интерфейса способны оказывать ОЧЕНЬ БОЛЬШОЕ влияние. Недавно мы указали клиенту на некоторые интерфейсы с очень большим количеством ошибок, особо отметив тот факт, что линии с наибольшим процентом потерь, вероятно, пропускают очень мало полезных данных. Поэтому следует исследовать причину этих ошибок. Сначала заказчик не выглядел обеспокоенным, поскольку уровень ошибок был ниже 3%. Однако лично мы считаем, что частота возникновения ошибок более 0,001% уже должна вызывать беспокойство.
Данная статья основана на этом опыте и призвана проиллюстрировать влияние ошибок интерфейса на производительность сети.
Ожидаемая наилучшая производительность TCP/IP
Первый вопрос, который следует рассмотреть: «Какую максимальную производительность TCP/IP можно ожидать от канала Gigabit Ethernet в кампусе?».
Прежде всего, давайте посмотрим на необходимую для TCP буферизацию, которая является следствием задержки полосы пропускания (BDP). При использовании канала Gigabit Ethernet буферизация, необходимая принимающей системе для обеспечения максимальной производительности, представляет собой объем данных, который может передаваться между получаемыми подтверждениями приема (ACK). Пропускная способность гигабитного канала составляет 1000 Мбит/с. Если обмен данными происходит внутри кампуса, например, между сервером центра обработки данных и пользователем, время приема-передачи (время двойного прохождения, RTT) должно быть очень маленьким, скажем, 2 миллисекунды или 0,002 секунды. Итак, для гигабитного канала принимающая система должна иметь возможность буферизовать количество данных, равное произведению полосы пропускания на задержку:
BDP = 1000 Мбит/с × 0,002 секунды
BDP = 1000 Мбит/с (1 байт / 8 бит) × 0,002 секунды
BDP = 125 000 000 байт × 0,002 секунды
BDP = 250 000 байт
Если значение BDP меньше размера окна TCP, полоса пропускания тракта является ограничивающим фактором пропускной способности. Для канала Gigabit Ethernet значение BDP 250 000 байт больше, чем окно TCP по умолчанию, равное 32 000 байт (размер окна TCP по умолчанию), поэтому полоса пропускания тракта не будет ограничивающим фактором.
Если же размер окна TCP меньше необходимой для сохранения заполнения канала буферизации, механизм работы TCP влияет на максимальную пропускную способность. В этом случае передающая система отправляет данные всего окна TCP, ожидает подтверждения от получателя, а затем снова осуществляет передачу. Приложение не использует механизм окна отправки, который позволил бы TCP заполнить полосу пропускания канала. Новые данные можно отправлять только после получения подтверждения (ACK). Следовательно, максимальная пропускная способность, которая доступна для источника и получателя, представляет собой размер окна, деленный на время, необходимое для возврата подтверждения ACK (то есть время двойного прохождения). В этом случае лучшая пропускная способность, которой можно достичь — это размер блока (количество данных, отправленных в одно окно), деленный на время двойного прохождения или
Максимальная пропускная способность = размер блока / RTT
Максимальная пропускная способность в бит/с = [байт × 8 (бит в байте)] / RTT
Также следует рассмотреть еще один вопрос: «Какова максимальная пропускная способность канала GE в центре обработки данных?»
Для проведения данного расчета предположим, что приложение отправляет фрагмент данных размером 64 000 байт по нескольким сегментам TCP и ожидает получения подтверждения (ACK) перед отправкой следующей порции данных. Если обмен данными происходит внутри кампуса, например, между сервером центра обработки данных и пользователем, время двукратного прохождения (RTT) должно быть очень маленьким, возможно, 2 миллисекунды или 0,002 секунды. Поэтому максимальная скорость для передачи одного файла будет
64000 × 8 / 0,002 = 256000000 бит/с или 256 Мбит/с
Вывод: если время двукратного прохождения (RTT) составляет 2 мс, в кампусе возможна максимальная скорость канала Gigabit Ethernet около 256 Мбит/с.
Ожидаемая производительность TCP/IP с ошибками
Третьим рассматриваемым вопросом является: «Какое влияние на производительность TCP/IP на канале Gigabit Ethernet в кампусе оказывают ошибки?»
Примечание. Существует несколько потенциальных источников ошибок интерфейса, включая его отбрасывание при недостаточной для поддержки объема передаваемого трафика пропускной способности, неверно настроенные дуплексный режим и скорость, чрезмерную буферизацию на интерфейсах, неправильно настроенные каналы EtherChannels, а также неисправности кабелей или оборудования.
Сначала рассмотрим допустимую частоту ошибок. В соответствии со стандартами IEEE 802.3ab приемлемым для 1000BaseT коэффициентом битовых ошибок (BER) считается одна ошибка на 1010 битов.
Потеря 1 бита за 1 × 1010 бит/сек = потеря 1 бита на 1,25 × 109 байт в секунду
Если предположить, что средний пакет имеет длину 1000 байт, показатель BER для 1000BaseT будет составлять потерю одного пакета из 1,25 × 106 пакетов. В процентном выражении один потерянный пакет из 1,25 × 106 = 8 × 10-7 = 0,00008%. Это значение можно округлить и действительно ожидать в кабеле Gigabit Ethernet потери не более 0,0001% пакетов.
Примечание. Это пакет очень большого размера. Более распространенным средним значением пакета для предприятий, включая VoIP, скорее может быть размер от 300 до 450 байт. Однако размер пакета 1000 байт был выбран для упрощения расчетов.
Однако потеря пакетов в каналах TCP может происходить и из-за проблем с производительностью и конфигурацией серверов и сетевых устройств. Из-за того, что пакеты теряются и их необходимо передавать повторно, производительность TCP снижается. Фактическое влияние потерь на максимальную пропускную способность определяется уравнением Матиса:
Максимальная скорость в бит/с < (MSS/RTT) × (1/квадратный корень (p)),
где
- MSS = максимальный размер сегмента в байтах
- RTT = время двойного прохождения (приема-передачи) в секундах
- p = вероятность потери пакета
Обратите внимание, что эта формула включает константу со значением, равным приблизительно 1, преобразующую байты в биты… Эта формула известна как уравнение Матиса из статьи 1997 года под названием «The Macroscopic Behavior of the TCP Congestion Avoidance Algorithm» (Очевидные особенности алгоритма предотвращения перегрузки TCP).
Теперь мы можем применить уравнение Матиса к рассматриваемому в примере каналу GE. Для MSS используем значение 1460 байт, так как такой объем данных умещается в один пакет TCP (когда MTU (максимальный блок передачи) сетевого оборудования составляет 1500 байт). Предположим, что приложение будет передавать блок данных размером 1460 байт и перед отправкой следующих данных ожидать подтверждения (ACK). Поскольку подобный обмен данными происходит внутри кампуса, снова предположим, что значение RTT составляет 0,002 секунды. Таким образом, максимальная скорость передачи одного файла со стандартным значением BER для кабеля 1000BaseT с потерями 0,0001% будет:
Максимальная скорость в соответствии с уравнением Матиса в бит/с < (MSS/RTT) × (1/квадратный корень (p))
Максимальная скорость в бит/с < (1460/0,002) × (1/квадратный корень (0,000001))
Максимальная скорость в бит/с < 7,3 × 108 бит/с
Максимальная скорость в бит/с < 730 Мбит/с
Прогнозируемая по уравнению Матиса скорость превышает максимальную скорость 256 Мбит/с, которая была рассчитана без учета потерь, поэтому максимальной скоростью будет меньшее из двух рассчитанных значений, то есть 256 Мбит/с. Это разумный результат, поскольку каналы, соответствующие допустимому значению BER для Gigabit Ethernet, не оказывают отрицательного воздействия на производительность TCP.
Что происходит на нашем пороговом уровне беспокойства? В этом случае потери составляют 0,001%, или 1 пакет из 100000.
Максимальная скорость в соответствии с уравнением Матиса в бит/с < (MSS/RTT) × (1/квадратный корень (p))
Максимальная скорость в бит/с < (1460/0,002) × (1/квадратный корень (0,00001))
Максимальная скорость в бит/с < 2,3 × 108 бит/с
Максимальная скорость в бит/с < 231 Мбит/с
Поскольку полученное значение находится в пределах 10% от прогнозируемых 256 Мбит/с, его можно считать «приемлемым». Однако давайте посмотрим, что произойдет, если в линии будут потери 0,01% или 1 потерянный пакет из 10 000 пакетов?
Максимальная скорость в соответствии с уравнением Матиса в бит/с < (MSS/RTT) × (1/квадратный корень (p))
Максимальная скорость в бит/с < (1460/0,002) × (1/квадратный корень (0,0001))
Максимальная скорость в бит/с < 7,3 × 107 бит/с
Максимальная скорость в бит/с < 73 Мбит/с
Это значительно ниже прогнозируемых 256 Мбит/с. Подобное снижение скорости окажет заметное влияние на производительность приложения.
Мысленно вернувшись в начало статьи, вспомним о значении 3% и посмотрим, на что влияет такой уровень ошибок? Если использовать коэффициент ошибок в 3%, максимальная пропускная способность канала Gigabit Ethernet резко снизится:
Максимальная скорость в соответствии с уравнением Матиса в бит/с < (MSS/RTT) × (1/квадратный корень (p))
Максимальная скорость в бит/с < (1460/0,002) × (1/квадратный корень (0,02))
Максимальная скорость в бит/с < 4,2 × 106 бит/с
Максимальная скорость в бит/с < 4,2 Мбит/с
Такое резкое снижение скорости может легко привести к снижению производительности приложений.
Выводы
Теперь вы понимаете влияние ошибок интерфейса на пропускную способность TCP. Четко видно, что производительность системы между хостами быстро снижается. Поэтому любая частота ошибок интерфейса, превышающая 0,01%, должна вызывать тревогу и становиться поводом для немедленного проведения исследования и устранения причины. Надеюсь, что все вышеизложенное помогло объяснить, почему ошибки интерфейса должны вызывать такое беспокойство!
Появились вопросы или нужна консультация? Обращайтесь!

Вечный параноик, Антон Кочуков.
См. также:
Структура цикла и сверхцикла. Цифровой поток, передаваемый по сети, имеет стандартную логическую структуру — цикл (frame). Такая структура обеспечивает процедуры мультиплексирования и демультиплексирования, а также передачу служебной информации (управляющей, встроенной диагностики).
Поток Е1 по своей структуре может быть: неструктурированным, с цикловой структурой, с цикловой и сверхцикловой структурой.
Неструктурированный поток не разделен на канальные интервалы (обычно это каналы 64 Кбит/с).
Поток с цикловой структурой разделен на 32 канальных интервала от 0 до 31. Структура цикла определена Рекомендацией G.704 и приведена на рис. 3.10. Как видно из рисунка, цикл имеет длину 256 бит, каждый канальный интервал КИ имеет 8 бит, скорость с которой передается каждый бит, составляет 8000 Гц. Таким образом, скорость в каждом канальном интервале КИ составляет 8 бит х 8000 Гц = 64 000 Гц.
Сигнал FAS (Frame Alignment Signal) является сигналом цикловой синхронизации и передается в нулевом канальном интервале КИО нечетных по порядку следования циклов, т.е. циклов с номерами 0, 2, 4, … Сигнал NFAS передается в КИО четных циклов — 1, 3, 5, …
Распределение бит с 1 по 8 в цикле приведено в табл. 3.2.
Поток с цикловой и сверхцикловой структурой представляет собой объединение 16 циклов, пронумерованных от 0 до 15, в один сверхцикл (Multi frame), как показано на рис. 3.11.

Рис. 3.10. Структура цикла Е1
Распределение бит 1-8 цикла Е1
|
Номер бита |
Фрейм с FAS |
Фрейм без FAS |
Примечания |
|
1 |
S, |
Б, — биты, зарезервированные под задачи международного использования |
|
|
2 |
0 |
1 |
— |
|
3 |
0 |
А |
Биты индикации аварии на удаленном конце. В случае аварии А = 1, при отсутствии аварии А = 0 |
|
4 |
1 |
S4 |
Биты предназначены под задачи националь- |
|
5 |
1 |
S, |
ного использования |
|
6 |
0 |
S* |
|
|
7 |
1 |
S7 |
|
|
8 |
1 |
S8 |
Сверхцикл делится на два подсверхцикла (SMF — Sub Multiframe) по 8 циклов каждый, обозначаемые SMFI и SMFII. SMF является блоком размером 2048 бит (8 строк по 256 бит). Значения бит 1-8 сверхцикла показаны в табл. 3.3.
В структуре сверхцикла сигнал FAS каждого цикла теряет свою значимость, так как необходимо иметь информацию о сверхцикле MFAS (Multi Frame Alignment Signal) в целом. Такая информация содержится в шестнадцатом канальном интервале нулевого цикла. Сигнал MFAS имеет вид 0000XYXX.

Рис. 3.11. Структура сверхцикла Е1
Значения бит 1-8 сверхцнкла
|
Подсверх цикл |
Цикл |
Биты 1-8 в нулевом канальном интервале нулевого цикла |
||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|||
|
0 |
с, |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
||
|
1 |
0 |
1 |
А |
s4 |
s5 |
S6 |
S7 |
s8 |
||
|
С |
2 |
с2 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
|
|
в Е |
SMFI |
3 4 |
0 С3 |
1 0 |
А 0 |
S4 1 |
S5 1 |
S6 0 |
S7 1 |
S8 1 |
|
Р |
5 |
1 |
1 |
А |
s4 |
S5 |
S6 |
s7 |
S8 |
|
|
X |
6 |
С4 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
|
|
ц |
7 |
0 |
1 |
А |
S4 |
S5 |
S6 |
S7 |
s8 |
|
|
и |
8 |
С, |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
|
|
к |
9 |
1 |
1 |
А |
s4 |
S5 |
S6 |
S7 |
S8 |
|
|
л |
10 |
с2 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
|
|
SMFII |
11 |
1 |
1 |
А |
s4 |
S5 |
S6 |
s7 |
S8 |
|
|
12 |
Сз |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
||
|
13 |
Е |
1 |
А |
s4 |
S5 |
S6 |
S7 |
s8 |
||
|
14 |
С4 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
||
|
15 |
Е |
1 |
А |
S4 |
S5 |
S6 |
S7 |
S8 |
Во фреймах, не содержащих сигнал FAS, бит 1 в нулевом канальном интервале используется для передачи сигнала сверхцикловой структуры (001011) и двух бит индикации ошибки Е.
При объединении циклов в один сверхцикл, появляется возможность встроенной диагностики при использовании циклического кода с избыточностью (CRC-4 — Cyclic Redundancy Check), который формирует четыре бита С} С2 С3 С4. Эти биты располагаются на месте бита 1 (S,) в циклах, содержащих сигнал FAS. Процедура CRC-4 представляет собой простой математический расчет, заключающийся в следующем:
на этапе кодирования:
— биты CRC-4 в SMF заменяются двоичными нулями;
— поток бит SMF преобразуется в полином D(x):
D(x) = «2047 х2047 + «2046 *2046 + +«2х1 + х + aQ>
где а = 0 или 1, степень х определяется позицией бита внутри SMF;
— БМЕ умножается на х4, затем делится по модулю 2 на образующий полином вида: С(х)= х4 + х +1:
х4?>(х)/С(х) = <2(х)+ к(х)1 С(х);
— результат деления запоминается и затем вставляется на соответствующие места бит С1С2С3С4 следующего 8МЕ.
на этапе декодирования:
— в принятом БМР биты С1С2С3С4 заменяются двоичными нулями.
— 8МР проходит обработку, аналогичную описанной выше.
— остаток от деления, полученный декодером, сравнивается с остатком, принимаемым в следующем подсверхцикле 8МР.
Если оба остатка от деления совпадают, то принимается решение, что ошибки в подсверхцикле отсутствуют. Если остатки не совпадают, то регистрируется наличие ошибки в подсверхцикле. Об этом оповещается противоположная сторона, путем установки одного бита Е в значение1 равное 1 для каждого ошибочного подсверхцикла.
Значения битов Е всегда учитываются, даже если подсверхцикл БМР, который их содержит, является ошибочным, так как маловероятно, что биты Е сами будут искажены. Задержка между определением ошибочного подсверхцикла и установкой бита Е, указывающего на наличие ошибки, должна быть менее 1 секунды.
Процедура СЯС-4, являясь удобным методом контроля ошибок в процессе мониторинга, не отменяет необходимости проведения измерений ВЕЯ, так как ошибка, обнаруженная с помощью СЯС-4 необязательно соответствует одной битовой ошибке. Несколько битовых ошибок в подсверхцикле могут дать одну ошибку СИ.С-4 для блока.
Измерения параметров канального уровня потока Е1. Измерения канального уровня систем передачи являются наиболее важными для их эксплуатации, поэтому именно к ним относится большинство стандартов на нормы каналов и трактов систем передачи.
Измерения канального уровня можно разделить на несколько групп: анализа кодовых ошибок; цикловой и сверхцикловой структуры; измерения битовых и блоковых ошибок; параметров аналоговых сигналов, передаваемых в потоке Е1.
Анализ цикловой и сверхцикловой структуры. Причинами возникновения сбоев в цикловой и сверхцикловой структурах могут быть:
— битовые ошибки, находящиеся в канальных интервалах КИО и КИ16;
— неисправная работа каналообразующего оборудования;
— некорректное формирование последовательностей FAS и MFAS.
Наличие единичных битовых ошибок в КИО и КИ16 компенсируется алгоритмами поддержания цикловой и сверхцикловой синхронизации. Вероятность появления битовых ошибок в КИО и КИ16 в нескольких последовательных циклах невелика и может иметь место, если параметр ошибки приближается к величине BER = 10-3, что свидетельствует о времени неготовности UAS тракта.
Неисправная работа каналообразующего оборудования приведет к появлению сигналов:
LOS (Loss of Signal) — потеря сигнала,
LOF (Loss of Frame) — потеря цикловой синхронизации,
AIS (Alarm Indication Signal) — сигнал индикации неисправности.
Правила генерации сигналов дефектов LOS и AIS определяются Рекомендацией G.775 и рассмотрены в гл. 2.
Измерения, связанные с цикловой и сверхцикловой структурой включают анализ сигналов FAS, MFAS и анализ ошибок по CRC-4, которые определяются Рекомендацией G.706. В большинстве приборов генерация ошибки FAS и MFAS производится при обнаружении ошибки в структуре этого сигнала без уточнения характера нарушения.
К сигналам о неисправности цикловой и сверхцикловой структуры относятся:
LOF (Loss of Frame) — потеря цикловой синхронизации.
CAS-LOM (Channel Associated Signalling-Loss of Multi Frame) — потеря сверхцикловой синхронизации.
CRC-LOM (Cyclic Redundancy Check — Loss of Multi Frame) — потеря сверхцикла CRC.
MAIS (Multi Frame Alarm Indication Signal) — сигнал индикации неисправности в сверхцикле.
MRAI (Multi Frame Remote Alarm Indication) — сигнал индикации неисправности в сверхцикле на удаленном конце.
Указанные сигналы несут полезную информацию о нарушениях цикловой и сверхцикловой структуры. Они используются в системе самодиагностики управления, а также могут генерироваться анализаторами потока El.
Параметр LOF регистрируется в следующих случаях: подряд принимаются 3 некорректных сигнала FAS и 3 сигнала NFAS, в которых бит 2 равен 0.
Сигнал FAS будет считаться восстановленным, если: в первом принимаемом цикле приходит корректный сигнал FAS,
во втором цикле на месте второго бита в КИО находится 1, а в третьем — присутствует корректный сигнал FAS.
Для того, чтобы избежать возможности регистрации сигнала FAS в тех циклах, где он не должен находиться, применяется следующая процедура. Если сигнал FAS определен в цикле N, то должна быть выполнена проверка двух условий: сигнал FAS отсутствует в следующем (N + 1) цикле и присутствует в цикле (N + 2). Несоблюдение одного или обоих этих требований может быть причиной новой проверки, инициированной в цикле (N + 2).
Сигнал CAS-LOM генерируется в случае приема двух последовательных MFAS с ошибкой. Сигнал CRC-LOM является сигналом о неисправности и генерируется в случае приема трех последовательных циклов с некорректным сигналом FAS или NFAS, а также, если обнаружены более чем 915 ошибок CRC в секунду. Сигнал MAIS генерируется в случае приема двух последовательных сверхциклов с количеством нулей менее 4-х. Сигнал MR AI генерируется в случае, если бит 6 в составе MFAS равен единице в двух последовательных сверхциклах.
Измерение битовых и блоковых ошибок. Нормы на параметры битовых и блоковых ошибок приведены в гл. 1, где рассмотрены основные положения Рекомендаций G.821, G.826 для долговременного нормирования, и гл. 2, где рассмотрены положения Рекомендаций М.2100/М.2101.1 для проведения экспресс-измерений.
Приказ № 92 Министерства связи РФ обобщил все три указанных документа и в настоящее время является единственным документом для паспортизации каналов и трактов первичной сети Министерства связи России. Этот приказ охватывает весь диапазон скоростей иерархии PDH. Все нормы разбиты на две группы: долговременные и оперативные, как показано на рис. 3.12. Долговременные нормы, в свою очередь, рассмотрены для каналов ОЦК (в соответствии с Рекомендацией 0.821) и для сетевых трактов (Рекомендация 0.826). Оперативные нормы соответствуют Рекомендации М.2100.

Рис. 3.12. Группы параметров трактов
В приказе помимо норм приведены методики расчета параметров каналов и трактов, исходя из особенностей структуры первичной сети Министерства связи России, т.е. деления ее на магистральную, внутризоновую, местную и абонентскую сети с соответствующими этому делению коэффициентами, учитывающими протяженность трактов.
Кроме норм на параметры ошибки, в документе нашли отражения нормы на фазовое дрожание в соответствии с Рекомендациями 0.171,0.823, 0.825.
Измерение параметров аналоговых сигналов. Эти измерения характерны только для систем передачи Е1, так как только в них осуществляется преобразование аналогового сигнала в цифровой. При эксплуатации тракта Е1 возникает задача оценки качества передачи по аналоговому каналу. Проведение измерений по всему перечню параметров, предусмотренных Приказом № 43 МС России от 15.04.96 «Нормы на электрические параметры каналов тональной частоты магистральной и внутризоновых первичных сетей» не оправдано на цифровой сети, поэтому производится только оценка аналоговой части тракта. При проведении измерений источником сигнала является генератор синусоидального сигнала, а приемником — анализатор потока, который восстанавливает из цифровой последовательности аналоговый сигнал и проводит анализ его параметров (см. рис. 3.3, а). Измерениям подлежат следующие параметры: частота сигнала, уровень тестового сигнала, уровень шума, соотношение сигнал/шум.
Измерение последних двух параметров реализовано не во всех современных анализаторах потока. Возможен и другой способ измерений: анализатор потока создает цифровой эквивалент синусоидального сигнала и вводит его в заданный канальный интервал внутри потока Е1 (рис. 3.3, б). Анализатор позволяет регистрировать: измеренное положительное пиковое значение амплитуды синусоидального сигнала в восьмиразрядном коде, смещение синусоидального сигнала относительно нулевого значения, измеренное отрицательное пиковое значение амплитуды синусоидального сигнала в восьмиразрядном коде.
⇐Физический уровень тракта Е1 | Измерения в цифровых системах передачи | Сетевой уровень потока Е1⇒
![]()
Выполнил: Студент гр. СОД 3-15-1 Папсуев О.С.

Что такое BER?
Ber (Bit Error Rate) — отношение числа ошибочно принятых битов к общему числу принятых битов. Его величина статистически колеблется около значения среднего коэффициента ошибок за длительный промежуток времени. Разница между непосредственно измеренным коэффициентом ошибок и долговременным средним значением зависит от числа контролируемых бит и тем самым от длительности измерения.
Kош= Nош/N
где N – общее число символов, переданных за интервал измерения; Nош – число ошибочно принятых символов за интервал измерения
Например, если число ошибочно принятых бит оказалось равным 20, а заданное общее число принимаемых бит – 106, то коэффициент ошибок составит
20/106 = 20 x 10-6 = 2 x 10-5

Зачем измеряется BER
Измерения параметра ошибок – это самая важная часть практики эксплуатации цифровой системы связи. Так как информация передается в системе связи в цифровом виде, то единственной мерой качества работы системы связи является параметр ошибки. Эта мера является универсальной в том смысле, что она едина для любых цифровых систем передачи и коммутации. Действительно, вне зависимости от того, какие типы линейного кода используются в системе передачи, на каких принципах построена система коммутации и какие протоколы используются, единой мерой качества цифровой сети является уровень ошибок, который она привносит в передаваемый цифровой поток.
Все технические решения в области эксплуатации направлены на уменьшение параметра ошибок, все измерения соотносятся с параметром ошибок (например, исследуются вопросы о влиянии джиттера на параметр ошибок, кодовых ошибок на параметр ошибок и пр.). Таким образом, измерение параметра ошибок представляет собой ключ к эксплуатационным измерениям, и уже одного этого достаточно, чтобы посвятить раздел методам измерения ошибок.
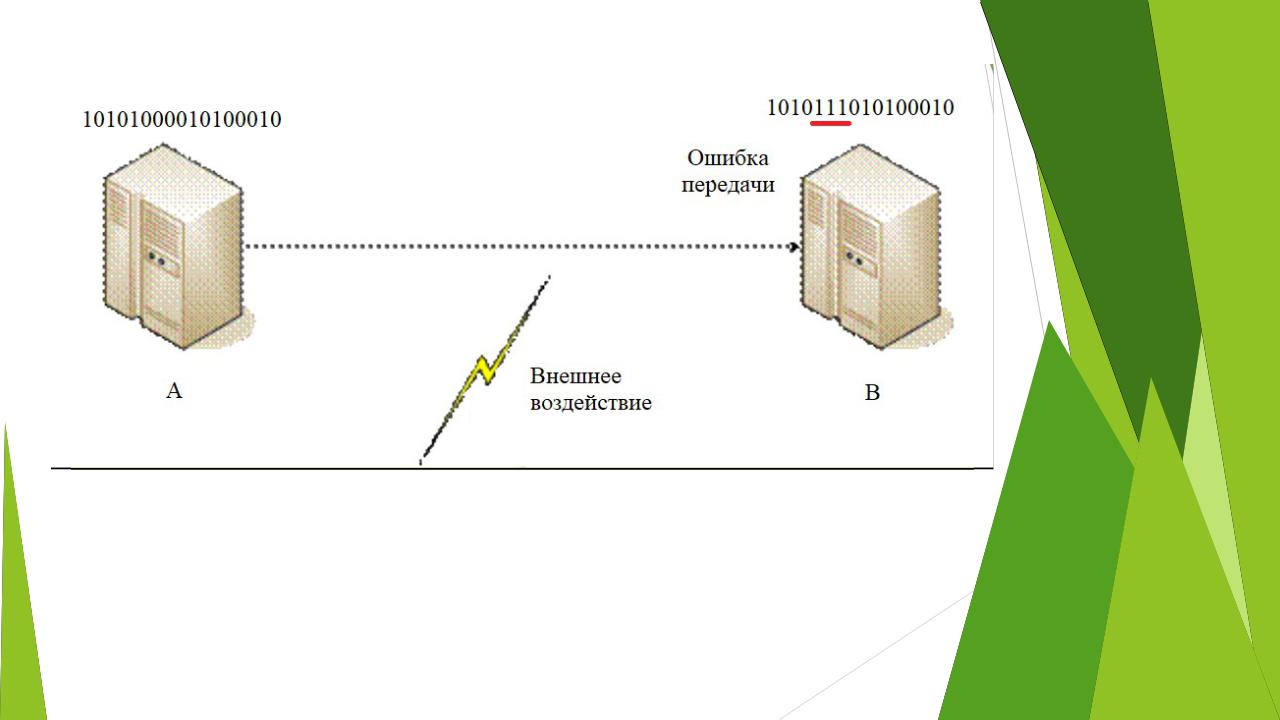
Модель возникновения ошибок в системе передачи
В самом общем виде модель возникновения ошибок выглядит следующим образом. Устройство А передает по рабочему каналу устройству В цифровой поток в виде единиц и нулей. Внешние воздействия на канал (шумы, интерференция, сбои в системе связи и т.д.) приводят к нарушению в интерпретации принимаемых символов на стороне В. В результате в некоторых случаях вместо 1 устройство В принимает 0 и наоборот.
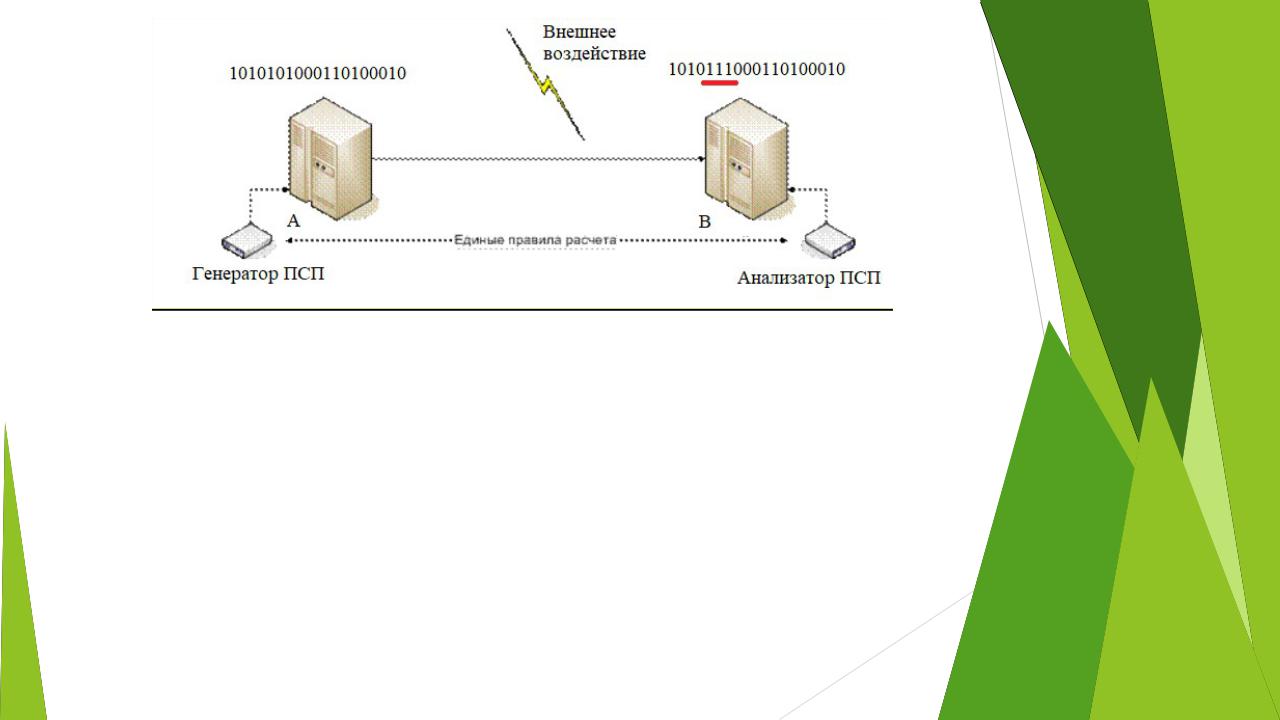
Измерение параметра ошибок с использованием тестовой последовательности
В методе использования тестовой последовательности очень важным является вопрос о том, каким образом передать на сторону В знание о структуре последовательности. Здесь существует два способа. Первый заключает в том, чтобы передавать одну и ту же последовательность циклично, например, одна единица, затем три нуля, тогда в канале будет передаваться информация
1000100010001000100010001000 … тестовая последовательность
Если на стороне В приемник понимает правило формирования этой тестовой последовательности, то он легко найдет все отклонения, например:
1000100010001010100000001000 … 2 битовые ошибки
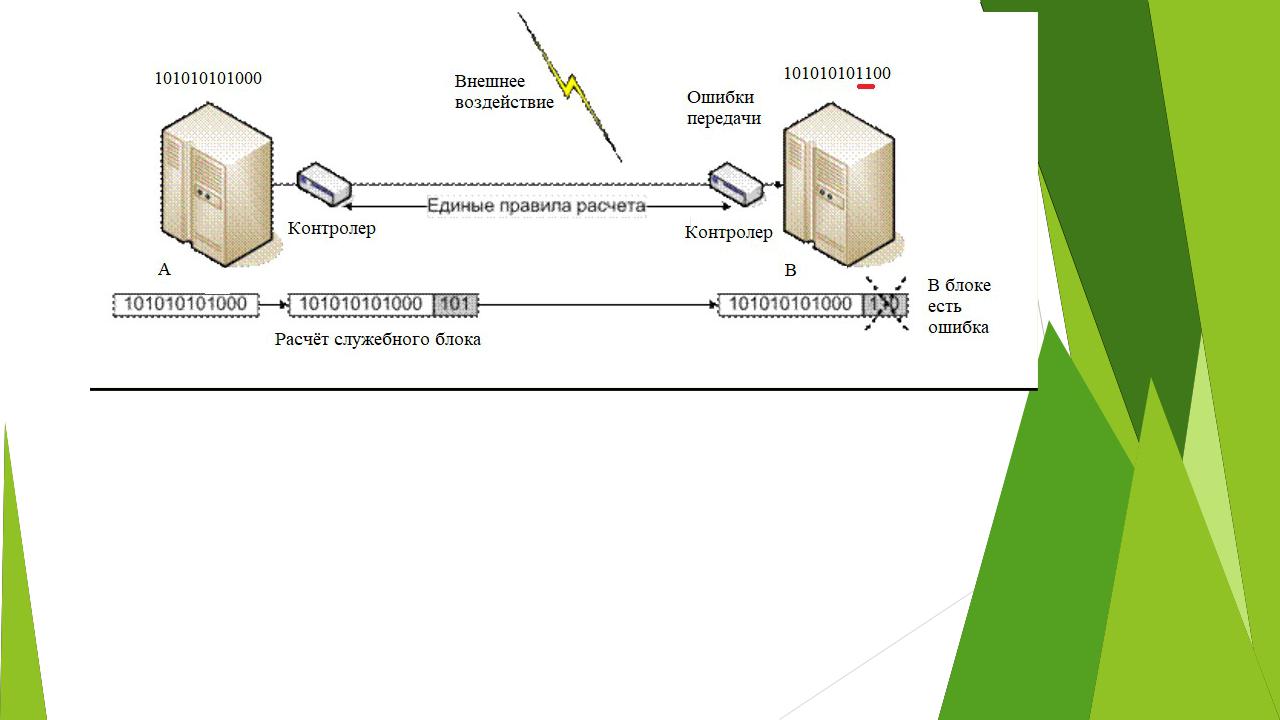
Метод измерения параметра ошибки без отключения канала
Суть метода состоит в том, что передаваемые данные реального трафика разделяются на блоки данных. Затем перед началом передачи данных в системе передачи над блоком совершается специальные вычисления, результат которых добавляется к блоку и передается на сторону В. На стороне приемника В над блоком производятся аналогичные вычисления, результат которых сравнивается с пересланным служебным полем от стороны А. Если результаты вычислений не совпадают, делается вывод о присутствии ошибки в блоке данных. Таким образом, можно проводить измерения на реальном трафике, без отключения канала. Единство методики определяется тем, что контроллеры, производящие вычисления, действуют по единым правилам расчета.

Принципы нормирования и измерения параметров ошибок
Выше уже было показано, что существует два метода измерений параметров соответственно BER и BLER. Рассмотрим теперь, каким образом эти методы накладываются на реальные методики измерений цифровых систем передачи.
Прежде всего, следует четко понять, что сами по себе параметры BER и BLER не могут быть использованы для нормирования качества в цифровых системах передачи. Возникает это потому, что оба параметра являются интегральными.
По определению, параметр BER представляет собой частное от деления количества ошибок на общее количество переданных битов:
BER=ErrB/BITS
Такое определение не учитывает природу возникновения ошибок и структуру их распределения. В то же время от структуры распределения битовых ошибок зависит окончательный вывод о том, качественный или некачественный канал системы передачи мы измеряем.
Для иллюстрации рассмотрим два случая возникновения ошибок в канале цифровой системы передачи
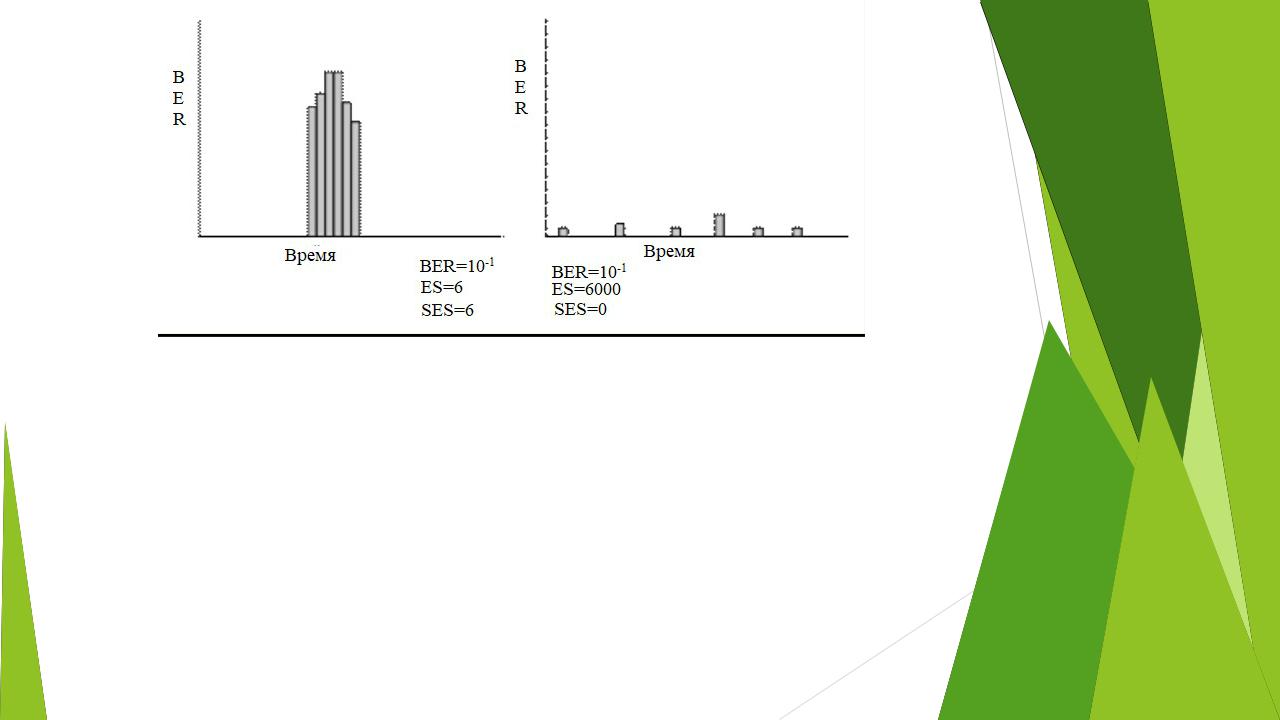
Слева представлен «пакет» ошибок, возникающий обычно вследствие наводок на кабель системы передачи.
Справа показан случай появления случайных ошибок, которые обусловлены самим качеством системы передачи и в большинстве случаев не связаны с какой-либо конкретной причиной.
В обоих случаях параметр BER оказывается очень высоким, например BER=10-5. Но сказать о практическом качестве цифровой системы передачи этот параметр не может. В рассмотренных примерах при одинаковом BER канал слева – это очень качественный канал. Все возникшие в нем ошибки помещаются в течение 6 сек, а других ошибок в канале нет. Если мы мысленно «вырежем» эти 6 секунд, то мы получим идеальный канал. В противоположность этому при BER=10-5 для канала справа мы имеем совершенно неприемлемое качество, т.к. появление единичных ошибок в таком канале – это слишком частое явление.
Эта иллюстрация показывает, что интегральная природа параметра BER (следовательно, и BLER) не позволяет использовать его в качестве корректного параметра нормирования и характеристики качества. Для полноты картины необходимо знать еще и характеристику распределения ошибок.

Для того, чтобы оценить распределение ошибок было предложено считать отдельно секунды с ошибками (ES) и секунды, пораженные ошибками (SES).
Секунды с ошибками ES – это все секунды в течении которых были ошибки, тогда как SES — это секунды, в течении которых BER был хуже, чем 10-3. Переход от анализа интегрированного параметра BER к дифференцированным значениям этого параметра в течении односекундных интервалов позволяет учесть распределение параметра ошибок. Например, на рисунке представлены значения не только параметра BER, но и соответствующие ситуации значения параметров ES и SES. По соотношению параметров ES и SES можно оценить кучность возникновения ошибок в измеряемом канале. Речь идет именно об оценке, а не о точном измерении параметров распределения ошибок, но для целей эксплуатации этого оказывается достаточно.
Следует отметить, что относительно измерений BER параметры ES, SES, а также другие параметры методики (AS, UAS и пр.) являются вторичными, т.к. непосредственно измеряется параметр BER в односекундных интервалах. Но именно эти параметры представляют интерес для отчетности по качеству в цифровом канале.

Измеритель коэффициента битовых ошибок Tektronix BERTScope BSA
Измерители коэффициента битовых ошибок Tektronix BERTScope серии BSA предлагают новый подход к измерению целостности сигнала в системах последовательных данных. Быстрое и точное определение коэффициента битовых ошибок (BER) за счет анализа диаграмм и генерации цифровых последовательностей с битовыми ошибками. Tektronix BERTScope серии BSA легко позволяет выделить проблемные биты или последовательности бит для дальнейшего анализа с помощью семи алгоритмов, обеспечивая непревзойденную глубину статистических измерений.
6.1. Определения коэффициента ошибок
6.2. Математическое выражение коэффициента битовых ошибок
6.3. Нормы на параметры ошибок систем передачи
6.4. Принципы построения измерителей ошибок
6.5. Техника измерения коэффициента ошибок
6.1. Определения коэффициента ошибок
Коэффициент ошибок – важнейшая характеристика линейного тракта. Он измеряется как для отдельных участков регенерации, так и для тракта в целом. Определяется коэффициент ошибок kОШ, по формуле:
kОШ = NОШ /N, (6.1)
где N – общее число символов, переданных за интервал измерения; NОШ – число ошибочно принятых символов за интервал измерения.
Измерение коэффициента ошибок носит статистический характер, так как получаемый за конечное время результат является случайной величиной. Относительную погрешность измерения в случае нормального закона распределения числа ошибок, что допустимо при N≥10, можно определить по формуле:
. (6.2)
Здесь ![]() — коэффициент, зависящий от доверительной вероятности результата измерений:
— коэффициент, зависящий от доверительной вероятности результата измерений:
![]() , (6.3)
, (6.3)
где ![]() — обратная функция интеграла вероятности
— обратная функция интеграла вероятности ![]() :
:
![]() . (6.4)
. (6.4)
Значение kОШ позволяет оценивать вероятность ошибки pОШ – количественную оценку помехоустойчивости. Область возможных значений оценки, в которой с заданной доверительной вероятностью будет находиться значение pОШ, определяется верхней (pВ) и нижней (pН) доверительными границами. При нормальном законе распределения числа ошибок значения pВ и pН определяются по формулам:
![]() , (6.5)
, (6.5)
![]() , (6.6)
, (6.6)
Очевидно, что точность оценок вероятности ошибки и коэффициента ошибки растет с увеличением N. Общее число символов цифрового сигнала, переданных за интервал измерения T, зависит от скорости передачи B: N = TB. Отсюда следует, что чем больше скорость передачи, тем быстрее и точнее можно оценить коэффициент ошибок.
6.2. Математическое выражение коэффициента битовых ошибок
Определим коэффициент битовых ошибок для реальных приёмников, которым свойственно наличие различных источников шумов. При этом будем считать, что приёмник принимает решение, какой бит (0 или 1) был передан в каждом битовом интервале путем стробирования фототока. Очевидно, что из-за наличия шумов данное решение может быть неверным, что приводит к появлению ошибочных битов. Поэтому, чтобы определить коэффициент битовых ошибок, необходимо понять, каким образом приемник принимает решение относительно переданного бита.
Обозначим через I1 и I0 фототоки, стробированные приемником в течение 1 и 0 битов, соответственно, а через s12 и s02 соответствующие шумы. Принимая, что последние имеют гауссовское распределение, проблема установления истинного значения принятого бита имеет следующую математическую формулировку. Фототок для битов 1 и 0 является выборкой гауссовской переменной со средним значением I1 и вариацией s1, а приёмник должен отслеживать этот сигнал и решать, является ли переданный бит 0 или 1. При этом существует много возможных правил принятия решения, которые могут быть реализованы в приёмнике с целью минимизации коэффициента битовых ошибок. Для значения фототока I этим оптимальным решением является наиболее вероятное значение переданного бита, которое определяется путём сравнения текущего значения фототока с пороговым значением Iп, используемым для принятия решения.
Рисунок 6.1. Функция плотности вероятности фототока принятых сигналов
Пусть при I ³ Iп принимается решение о том, что был передан бит 1, в противном случае – бит 0. Когда биты 1 и 0 равновероятны, что и рассматривается в дальнейшем, пороговый ток приблизительно равен:
![]() (6.7)
(6.7)
Геометрически Iп представляет собой значение тока I, для которого две кривые плотности вероятностей (рис. 6.1) пересекаются.
Вероятность того, что I < Iп, т. е. вероятность ошибки при передаче бита 1, обозначим через Р0,1, а вероятность решения для переданного бита 1, когда I ³ Iп при переданном 0, обозначим Р1,0.
Пусть Q(х) обозначает вероятность того, что нулевая средняя вариация гауссовской переменной превышает значение х, тогда:
(6.8)
а
(6.9)
а
(6.10)
Можно показать [14], что BER определяется,
(6.11)
Очень важно отметить, что в ряде случаев эффективным является использование изменяемого в зависимости от уровня сигнала порога принятия решения, как, например, шума оптического усилителя. Многие высокоскоростные приёмники обладают такой особенностью. Однако более простые приемники имеют порог, соответствующий среднему уровню принимаемого тока, а именно (I1 + I0)/2. Такая настройка порогового значения дает большой коэффициент битовых ошибок, определяемый выражением [14].
(6.12)
Выражение (6.11) можно использовать для оценки BER, когда известны как мощность полученного сигнала, соответствующего битам 0 и 1, так и статистика шумов.
6.3. Нормы на параметры ошибок систем передачи
Битовые ошибки являются основным источником ухудшения качества связи, проявляющегося в искажении речи в телефонных каналах, недостоверности передачи информации или снижении пропускной способности передачи данных, и характеризуются статистическими параметрами и нормами на них, которые определены соответствующей вероятностью выполнения этих норм. Последние делятся на долговременные и оперативные нормы, первые из которых определяются рекомендациями ITU-T G.821 и G.826, а вторые – М.2100, М.2110 и М.2120, при этом, согласно М.2100, качество цифрового тракта по критерию ошибок делят на три категории:
- нормальное – BER < 10-6;
- пониженное – 10-6 ≤ BER < 10-3 (предаварийное состояние);
- неприемлемое – BER ≥ 10-3 (аварийное состояние).
Так как появление ошибок является следствием совокупности всех текущих условий передачи цифровых сигналов, имеющих случайный характер, то при отсутствии данных о законе распределения ошибок его отдельные элементы могут быть определены с определенной степенью достоверности только по результатам продолжительных измерений. В то же время на практике необходимо, чтобы значения параметров ошибок для ввода в эксплуатацию и технического обслуживания систем передачи основывались на достаточно коротких интервалах времени измерения. Исходя из этого, были определены следующие параметры ошибок [14]:
- секунда с ошибками (error second, ES) – односекундный интервал, содержащий хотя бы один ошибочный бит;
- секунда, пораженная ошибками (severely error second, SES) – односекундный интервал с BER ≥ 10-3.
Данные параметры ошибок должны оцениваться в течение времени готовности (available time), отсчет которого начинается с первой секунды из десяти следующих друг за другом секунд, в каждой из которых BER<10-3. ITU-T M.2100 регламентирует нормы качества (performance objectives, PO) на выраженные максимальным процентом времени параметры ошибок, которые зависят только от скорости передачи и приводятся для условного эталонного соединения (hypothetical reference connection, HRC/HRX/) длиной 27500 км. При этом нормы качества распределяются по участкам соединения соответствующей категории качества. В качестве эталонной модели такого распределения принимается участок высокой категории качества протяженностью 25000 км, которому присваивается 40% от общей нормы качества на параметры ошибок передачи точка-точка, что в пересчете на 1 км, дает 0.0016 %/км.. Остальные 4 участка (2 среднего качества и 2 с приемлемым качеством) длиной 2 х 1250 км расположены по обе стороны от центрального. Поэтому распределение, пропорциональное протяженности L км тракта высокой категории качества, будет определяться, как
AL = 0.0016 · L %/км. (6.13)
Нормы качества на цифровые тракты и каналы подразделяются на настроечные и эксплуатационные, причем вводимые в эксплуатацию впервые или после проведения корректирующих действий они должны сдаваться по настроечным нормам качества, а в процессе эксплуатации должны соответствовать эксплуатационным нормам. Обычно [105] эксплуатационная норма представляется в виде эталонной нормы качества (reference performance objective, RPO)
RPO = A · T · PO, (6.14)
а настроечная, включающая запас на старение, используемая при вводе в эксплуатацию (bringing into service objective, BISO), определяется, как половина RPO, т.е.
BISO = RPO/2. (6.15)
Здесь PO – норма качества оцениваемого параметра, а T = 86400 с (одни сутки) – продолжительность измерений (количество односекундных интервалов).
Для анализа результатов, полученных в процессе измерений, используются также предельные значения S1и S2 норм (рисунок 6.2), которые соответствуют числу событий (ES,SES) и определяются, как:
S1 = RPO/2 – D и S2 = RPO/2 + D, (6.16)
где D = 2![]() — дисперсия оцениваемого параметра.
— дисперсия оцениваемого параметра.
Рисунок 6.2. Предельные значения и условия ввода в эксплуатацию системы передачи
При соответствии результатов измерений норме S1 цифровой тракт может быть введен в эксплуатацию без всякого сомнения, а при превышении нормы S2 в обязательном порядке требуется повышение качества испытываемого цифрового тракта, т.е. должны быть проведены корректирующие действия с повторными измерениями. Если значение ES или SES лежит в интервале от S1 до S2, цифровой тракт может быть введен в эксплуатацию условно или временно с продолжением измерений в течение 7 суток. Данный подход к оценке качества цифровых систем передачи по параметрам ошибок позволяет сократить время измерений и получить норму цифрового тракта суммированием норм цифровых участков. При этом значения RPO, D, S1 и S2 выражаются в виде числа событий за установленный интервал времени, а не в виде процентов времени.
Для измерения коэффициента ошибок разработан ряд специальных BER анализаторов – измерителей коэффициента ошибок, включающих генераторы псевдослучайных и детерминированных последовательностей передаваемых кодированных символов, а также приемное оборудование, осуществляющее собственно измерение коэффициента ошибок. В случае посимвольного сравнения кодов измерение может быть выполнено с использованием шлейфа, т.е. путем измерения ошибок с одной оконечной станции при установке на противоположном конце шлейфа. Другой метод основан на выделении ошибок благодаря избыточности используемых кодов и используется для измерений от передающей до приемной сторон тракта или участка линии, т.е. когда выделение и фиксация ошибок производятся на ее приемном конце. Очевидно, что в первом случае требуется использование одного комплекта, а во втором – двух комплектов приборов. При этом измеренное значение коэффициента ошибок отражает качество передачи при прохождении сигнала в обоих направлениях и в каждом направлении соответственно.
6.4. Принципы построения измерителей ошибок
В зависимости от скорости передачи контролируемой системы передачи в анализаторе используются различные схемотехнические решения.
Рисунок 6.3. Генератор низкоскоростного BER анализатора
Низкоскоростной генератор тестовых кодов и детектор ошибок. Используемый в телекоммуникациях анализатор BER, состоящий [106] из генератора тестовых кодов и собственно анализатора ошибок, представлен на рисунках 6.3 и 6.4. Он предназначен для невысоких (до 200 Мбит/с) битовых скоростей, учитывая, что максимальные типовые скорости составляют 44.736 Мбит/с (DS3) в Северной Америке и 139.364 Мбит/с – за пределами Северной Америки.
PRBS с генератором кодовых групп, представленный на рис. 6.16, синхронизируется либо от источника тактового сигнала с фиксированной частотой (согласно G.703), либо от синтезатора, осуществляя тем самым изменение частоты синхронизации. В связи с этим использование данных средств требует задания некоторых определенных частот синхронизации и наличия возможности обеспечения их небольших смещений от ±15 до ±50 ppm. Для повторения тестовых кодов схема PRBS и генератор кодовых групп обычно имеют триггерную схему, управляющую либо выходным усилителем бинарных данных, который обеспечивает данные и данные с сопровождающим синхросигналом, либо выходную схему кодированных данных. Это позволяет создавать цикловую синхронизацию сигнала в соответствии с требованием, например, системы SONET/SDH. Кроме этого, данная схема способствует созданию соответствующего интерфейсного кода для эффективного восстановления тактовой синхронизации. Выходной усилитель обеспечивает необходимый уровень сигнала в соответствии со спецификацией электрического интерфейса, в том числе сигнала с чередованием полярности импульсов.
Рисунок 6.4. Низкоскоростной детектор ошибок
Детектор ошибок, показанный на рисунке 6.4, получает стандартный кодированный сигнал, восстанавливает генератор синхросигнала и устраняет кодирование для обеспечения бинарной даты и синхросигналов. Он обнаруживает любые нарушения алгоритма интерфейсного кода и посылает сигналы на счетчик ошибок, что составляет первый уровень процесса обнаружения ошибок. При работе с цикловыми сигналами приемник захватывает любой присутствующий элемент цикловой синхронизации, проверяет наличие цикловых ошибок и декодирует любые встроенные сигналы тревоги, или CRC биты, тем самым обеспечивая возможность измерения.
Наконец, бинарные данные и синхросигнал направляются на детектор ошибок и генератор эталонных тестовых кодов, которые проверяют полученный тестовый код бит за битом на предмет обнаружения логических ошибок. Временная база контролирует пропускание измерения для непрерывного, периодического и ручного режима. Накопленное количество ошибок обрабатывается для получения значения BER и анализа функционирования при наличии ошибок.
Высокоскоростной генератор тестовых кодов и детектор ошибок. На рисунках 6.5 и 6.6 показаны схемы [14] для 3 Гбит/с генератора тестовых кодов и детектора ошибок. Вследствие высокой битовой скорости генерация последовательных PRBS и кодовых групп на этой скорости не представляется целесообразной. Поэтому тестовые коды генерируются (рисунок 6.5) как параллельные 16-битные кодовые группы при максимальной скорости 200 Мбит/с, используя затем выполненные по биполярной технологии регистраторы смещения и высокоемкостную память. Высокоскоростные схемы обычно выполняются на основе арсенид-галлиевых логических схем, преобразующих параллельные данные в последовательный поток на скорости до 3 Гбит/с.
Согласно данной схеме, вход синхросигнала генерируется синтезатором частоты, согласующее устройство управляется через линию фиксированной задержки, а генератор тестовых кодов и выходной усилитель синхронизируются через схему дискретной и плавно изменяемой задержки, так что фаза синхросигнала/данных может изменяться как в положительном направлении, так и в отрицательном. Дискретные значения задержки составляют 250, 500 и 1000 пс, тогда как диапазон плавной задержки лежит в пределах от 0 до 250 пс с 1 пс инкрементом.
Корректор временной диаграммы, связанный с выходным усилителем, пересинхронизирует данные через триггер D типа для поддержания минимального фазового дрожания. Так как подобный тип тестового устройства обычно используется при проведении лабораторных измерений, выходные уровни синхросигнала и данных и постоянные смещения могут варьироваться для того или иного конкретного случая использования.
Детектор ошибок, показанный на рис. 6.6, имеет простое параллельное соединение, в связи с чем входы синхросигнала и данных проходят через схемы дискретной и плавной задержки, обеспечивая оптимальную настройку при обнаружении ошибок для любой фазы синхросигнала/данных. Действительно, путем настройки под контролем внутреннего процессора решающего порога и фазы синхросигнала условия функционирования детектора ошибок могут быть оптимизированы автоматически. Высокоскоростной демультиплексор преобразует последовательный поток данных в 16-битные параллельные кодовые группы наряду с поделенным на 16 синхросигналом. Параллельно соединенный генератор эталонных тестовых кодов синхронизируется с входными данными и осуществляет сравнение битов, поэтому любая ошибка фиксируется одним из двух счетчиков, первый из которых подсчитывает число ошибок, а второй – общее число битов. Процессор измерения обеспечивает анализ функционирования при наличии ошибок с разрешением до 1 мс.
6.5. Техника измерения коэффициента ошибок
Рассмотрим измерение коэффициента ошибок путем посимвольного сравнения и подсчета ошибочно принятых элементарных импульсов. Для этого вначале (перед измерением) на передающей станции с помощью оптического аттенюатора устанавливают заданный в технических условиях на аппаратуру линейного тракта уровень оптического излучения. Затем на передающем конце подключают генератор испытательных сигналов, а на приемном – измеритель коэффициента ошибок и, изменяя значения уровней средней мощности, измеряют коэффициент ошибок. Время измерения определяют в зависимости от скорости передачи, объема информации и значений коэффициента ошибок Кошi (BERi).
Коэффициент ошибок при заданном уровне оптического излучения вычисляют по формуле [14]
![]() (6.17)
(6.17)
где
![]() , , (6.18)
, , (6.18)
где ![]() и
и ![]() — погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
— погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
Главная → Каталог статей → Технологии связи → SDH
Канал Е1
Канал Е1 — первичный канал иерархии PDH — является основным каналом, используемым во вторичных сетях телефонии, передачи данных и ISDN. По сравнению с остальными каналами иерархии PDH этот канал имеет несколько особенностей, связанных с его использованием, а именно сверхцикловую структуру и канал сигнализации, используемый во вторичных сетях цифровой телефонии и ISDN.
Остальные каналы иерархии PDH имеют только цикловую структуру. Такое отличие канала Е1 обусловлено его функцией в современной первичной сети — канал Е1 обычно является «пограничным» каналом между первичной и вторичными сетями. Структура систем передачи Е1 включают три уровня эталонной модели OSI: физический, канальный и сетевой. Физический уровень описывает электрический интерфейс потока Е1, а также параметры сигнала Е1.
Канальный уровень описывает процедуры мультиплексирования и демультиплексирования каналов более низкого уровня иерархии (ОЦК 64 кбит/с и каналов ТЧ) в поток Е1, цикловую и сверхцикловую структуру потока Е1, встроенные процедуры контроля ошибок и т.д. Наконец, сетевой уровень описывает процедуры управления каналами Е1 в первичной сети, а также контроль параметров ошибок на сетевом уровне. Этот уровень является относительно неполным и включает всего лишь несколько процедур. Основным же для рассмотрения систем передачи Е1 является структура канального уровня. Рассмотрим более подробно структуру каждого из трех уровней систем Е1.
Физический уровень Е1
Физический уровень Е1 включает в себя описание электрических параметров интерфейсов Е1 и параметров сигналов передачи, включая структуру линейного кода. Рассмотрим наиболее важные эксплуатационные параметры физического уровня Е1.
Основные характеристики интерфейса Е1. Тип линейного кодирования.
Согласно основные характеристики интерфейса следующие:
• Скорость передачи — 2048 кбит/с ± 50 ppm (1 ppm (point per million) = 10-6), таким образом, допускается отклонение частоты передаваемого сигнала (2048 кГц) ± 102,4 Гц
• Используемые типы кодирования: HDB3 (стандартизирован ), либо AMI. Использование кода AMI в настоящее время уже не рекомендуется, однако ряд старых цифровых систем передачи могут использовать этот код.
AMI
Это наиболее простой формат линейного кодирования. AMI расшифровывается как инверсия альтернативного бита. Этот формат использует инверсию каждой следующей 1 (смотрите рис). В большинстве случаев AMI не используется, поскольку этот формат линейного кодирования приводит к частым потерям синхронизации в случае длинных последовательностей нулей.
HDB3
Формат линейного кодирования HDB3 был специально разработан для решения проблем синхронизации, возникающих в случае использования AMI. В формате HDB3 за последовательностью из четырех последовательных нулей следует двухимпульсная вставка «плюс импульс-минус импульс». Оборудование на удаленном конце принимает поток Е1 и заменяет двухимпульсные вставки на последовательность нулей, восстанавливая исходную последовательность данных. Таким образом, код HDB3 обеспечивает большую плотность импульсов в потоке, что дает лучшие параметры синхронизации по принимаемому сигналу. На рис. в качестве примера приведено кодирование по HDB3 последовательности 1000 0000.
Существуют определенные правила таких вставок. Тип вставки определяется полярностью последнего инвертированного бита и количеством битов последовательности предыдущей вставки. Если это количество четное, вставляется 000V; при этом полярность V такая же, как и непосредственно предшествовавшего импульса. Если количество битов нечетно, то вставка имеет вид B00V, где полярность В — противоположная предыдущему импульсу, а полярность V такая же, как и В. На рис. 2.3. представлен алгоритм вставки импульса в последовательность 0 кода HDB3.
Уровни сигналов, электрические параметры интерфейса, форма импульса.
Помимо параметров частоты сигнала и типа линейного кодирования стандарт определяет следующие нормы на электрические параметры интерфейса (смотрите таблицу).
Нормы на электрические параметры интерфейса Е1
Форма импульса электрического сигнала В соответствии с рисунком «V» определяется значением номинальной пиковой амплитуды импульса.
Тип пары в каждом направлении Одна коаксиальная пара Одна симметричная пара
Импеданс 75 Ом 120 Ом
Номинальное пиковое напряжение импульса 2.37 В 3 В
Пиковое напряжение при отсутствии импульса 0 ± 0.237 В 0 ± 0.3 В
Номинальная ширина импульса 244
Отношение амплитуд положительного и отрицательного импульсов в середине импульсного интервала от 0.95 до 1.05
Отношение ширины положительного и отрицательного импульсов с середине номинальной амплитуды. от 0.95 до 1.05
Как видно из таблицы, существуют два стандарта на параметры физического интерфейса Е1: симметричный интерфейс на 120 Ом и коаксиальный (несимметричный) интерфейс 75 Ом. Им соответствую значения пикового напряжения в 3 В и 2,37В. Следует отметить, что оба типа интерфейсов могут реально встретиться в отечественной практике. Симметричный интерфейс 120 Ом получил наибольшее распространение в Европе и является официальным стандартом для России. Интерфейс 75 Ом получил широкое распространение на американо-канадском рынке. В России этот интерфейс не рекомендован к применению, тем не менее в практике эксплуатации оборудования цифровых систем передачи американских и канадских фирм-производителей он может встретиться.
Таким образом, типичный уровень сигнала импульсов потока Е1 с импедансом интерфейса 75 Ом или ± 2.37 В (для сигнала бинарной 1) или 0 В (для 0), а для симметричного интерфейса 120 Ом — ±3В (для сигнала бинарной 1) или 0 В (для 0). Реальный сигнал обычно находится в пределах ±10% от этой величины. В идеальном случае передаваемый импульс является совершенно симметричным. Однако в реальной практике импульс сильно трансформируется при его генерации и передаче по каналу Е1. На рисунке форма идеального импульса и реального импульса, который передается по каналу Е1.
Канальный уровень Е1
Параметры канального уровня потока Е1 включают в себя цикловую и сверхцикловую структуру потока, описание процедур контроля ошибок по цикловому избыточному коду (CRC), а также описание процедур мультиплексирования и демультиплексирования каналов ТЧ в поток Е1. Последние включают в себя процедуры дискретизации, квантования и компандирования аналогового сигнала, описанные во всех учебниках по современным средствам связи и ниже описываться не будут. Рассмотрим цикловую структуру потока Е1 и встроенные процедуры контроля ошибок.
Цикловая и сверхцикловая структура Е1
При передачи по первичной сети цифровой поток преобразуется в блоки стандартной логической структуры — циклы. Цикловая структура обеспечивает работу процедур мультиплексирования и демультиплексирования, передачу управляющей информации, а также встроенную диагностику по параметру ошибок в цифровой системе передачи. Существует три основных варианта цикловой структуры Е1: неструктурированный поток, с цикловой структурой и с цикловой и сверхцикловой структурой.
Неструктурированный поток Е1 используется в сетях передачи данных и не имеет цикловой структуры, т.е. разделения на каналы (обычно это мультиплексирование каналов ОЦК — 64 кбит/с).
Поток Е1 с цикловой структурой предусматривает разделение на 32 канала ОЦК по 64 кбит/с в форме разделения на канальные интервалы (Time Slot — TS) от 0 до 31. Цикловая структура описана в. Для каждого канального интервала в составе цикла отводится 8 битов, таким образом длина цикла равна 256 битов, что при заданной скорости передачи Е1 составляет 125 мкс (длительность одного цикла). Нулевой канальный интервал отводится под передачу сигнала цикловой синхронизации FAS (Frame Alignment Signal).
Структура цикла FAS представлена на рисунке ниже. Различаются четные и нечетные циклы. В TS0 нечетных циклов передается сигнал FAS (на рисунке — первая строчка), который включает в себя последовательность цикловой синхронизации 0011011 и один служебный бит, зарезервированный под задачи международного использования. В TS0 четных циклов передается сигнал NFAS, не содержащий кодовую последовательность цикловой синхронизации.
Первая строка содержит сигнал FAS
Вторая строка содержит сигнал NFAS
Sn = биты, зарезервированные под задачи национального использования
Si = биты, зарезервированные под задачи международного использования
Последовательность FAS = 0011011
В составе сигнала NFAS передается бит Si, зарезервированный под задачи международного использования, бит А, используемый для передачи сигналов о неисправностях, а также пять служебных битов Sn4, Sn5, Sn6, Sn7, Sn8,используемые для передачи сигналов сетевого управления первичной сети Е1, диагностики и дополнительных процедур контроля ошибок.
В отечественной терминологии вариант потока Е1 с цикловой структурой получил название ИКМ-31. Он используется в ряде систем передачи данных, а также в некоторых приложения ОКС7, ISDN и B-ISDN. В ряде случаев аппаратура передачи/приема Е1 использует еще и шестнадцатый канальный интервал (TS-16) для передачи информации о сигнализации, связанной с разговорным каналом (сигнализации CAS).
В этом случае поток Е1 имеет дополнительно к цикловой структуре еще и сверхцикловую структуру (MFAS — Multi Frame Alignment Signal). В отечественной терминологии такой вариант цикловой структуры Е1 получил название ИКМ-30. При этом 16 циклов объединяются в сверхцикл размера 4096 битов и длительностью 2 мс. Когда идет передача/прием информации в виде сверхциклов MFAS, индивидуальная информация FAS каждого цикла теряет значимость. Необходимо рассматривать всю информацию FAS — 16 циклов.
Первый цикл содержит информацию MFAS о сверхцикле в шестнадцатом канальном интервале, а остальные 15 интервалов используются для передачи сигнальной информации. Структура MFAS показана на рисунке.
Сигнал MFAS=0000XYXX
X- запасные биты (1 обычно не используется)
Y- удаленная неисправность MFAS ( равно 1 в случае, если потеряна сверхцикловая синхронизация)
Процедуры контроля ошибок передачи. Использование избыточного кода CRC-4
Передача потока Е1 с цикловой структурой ИКМ-30 имеет важный механизм — процедуру встроенной диагностики параметров ошибки. Для этой цели используется биты Si в составе циклового заголовка FAS и NFAS.
Процедура использует сверхцикловую структуру 16 циклов, как показано на рис. 2.8 и механизм расчета параметра ошибки по контрольному избыточному коду CRC-4 (полином X(4)+X+1).
Принцип CRC-4 базируется на простом математическом расчете, производимом в каждом сверхцикле данных. Оборудование передачи Е1 производит расчет суммы CRC-4 и включает результаты суммы в сигнал следующего сверхцикла. Оборудование приемника принимает сигнал и производит аналогичный расчет и сравнение полученной суммы и переданной в следующем сверхцикле. Если в двух полученных суммах имеется расхождение, генерируется сигнал ошибки CRC-4. В настоящее время в линейное оборудование и системы самодиагностики цифровых каналов ИКМ встраивается функция анализа по CRC-4. Часто возникает вопрос о целесообразности проведения анализа по BER, если система и так анализирует параметр ошибки по CRC-4.
Отвечая на этот вопрос, необходимо учесть два основных принципа использования CRC-4. Во-первых, каждая ошибка CRC-4 не обязательно связана с ошибкой одного бита информации. Несколько битовых ошибок в одном сверхцикле дадут только одну ошибку CRC-4 для блока. Во-вторых, несколько битовых ошибок могут компенсировать друг друга в смысле значения суммы CRC-4. CRC-4 является удобным методом контроля ошибок в процессе сервисного мониторинга при работающем канале, когда практически невозможно измерить реальные параметры ошибок по битам, поскольку невозможно добиться синхронизации тестовой последовательности. Тем не менее в режиме с отключением канала необходимо проводить измерения ошибок по битам, поскольку результаты таких измерений более точны.
Рассмотрим механизм передачи информации о CRC-4. Для передачи этой информации используется сверхцикловая структура. Однако, сверхцикл CRC-4 не обязательно связан со сверхциклом MFAS. Каждый сверхцикл может быть разбит на 2 подцикла (SMF). На рисунке ниже они отмечены как SMF#1 и SMF#2 и содержат по 8 циклов каждый. Соответственно отмечены по 4 бита, используемые для передачи CRC-4 каждого сверхцикла (биты С). Биты CRC-4 вычисляются методом деления двоичной суммы содержания 8 последовательных циклов на тестовый полином, остаток от деления в виде 4-битового сообщения вставляется в следующий сверхцикл для передачи в потоке Е1.
Структура сверхцикла CRC-4 включает несколько сообщений сверхцикловой структуры CRC-4. В четных циклах NFAS битами Si передается сообщение сверхцикловой синхронизации CRC-4 — комбинация 001011, которая используется на приемной стороне для синхронизации по CRC. Кроме этого в составе сверхцикла SMF, передается его главная информация — сообщение C1C2C3C4. В качестве дополнительного сообщения, передаваемого в направлении передачи при обнаружении ошибки по CRC-4, используется 2-битовое сообщение Е1Е2. Каждый бит Е связан с одним из принятых сверхциклов SMF (в составе сверхцикла MFAS используется два сверхцикла SMF, поэтому сообщение использует два бита Е). Когда оборудование приемника получает информацию об ошибке CRC-4, оно генерирует бит Е для сообщения передатчику о принятой ошибке. Мониторинг по CRC производится в режиме реального времени непосредственно после установления циклового синхронизма. В этом случае возникает цикловая синхронизация по CRC-4 и сверхциклам SMF по кодовой последовательности 001011. Эта синхронизация достаточно устойчивая, потеря цикловой синхронизации по CRC-4 отображается только после того, как более чем 914 сообщений CRC в секунду не соответствует ожидаемым значениям.
Сетевой уровень Е1
Стандартизация систем передачи Е1 охватывает также третий, сетевой уровень, где осуществляются процедуры управления первичной сетью. При работе процедур управления, они широко используют сигналы о неисправностях, генерируемые в современных цифровых системах передачи, а также сигналы о возникновении ошибок, фиксируемые встроенными средствами диагностики. Эта информация собирается в узлах системы управления и обрабатывается. Таким образом, сетевой уровень Е1 включает в себя набор определенных служебных сигналов и сообщений, используемых системой управления первичной сетью. Такие сообщения делятся на три категории:
• сообщения о возникновении ошибок в системе передачи;
• сообщения о неисправностях, возникающих в системе передачи;
• сообщения, используемые для реконфигурации первичной сети и восстановлении плана синхронизации.
Последняя категория сообщений сетевого уровня Е1, получивших название сообщений SSM (System Synchronization Messages — сообщения в системах синхронизации), будет отдельно рассматриваться в главе, посвященной проблемам построения и эксплуатации современных систем синхронизации. Здесь же мы рассмотрим первые две категории сообщений.
Сообщения о возникновении ошибок в системе передачи Е1 использует сообщения E1E2. Действительно, сообщения, передаваемые битами Е, служат подтверждением возникновения блоковой ошибки CRC и могут служить критерием качества цифровой системы передачи. Система управления анализирует значения битов Е и собирает информацию о возникающих в системе передачи Е1 ошибках.
Сообщения о неисправностях в системе передачи передаются в циклах NFAS, а также битами MFAS в случае, если поток Е1 имеет сверхцикловую структуру. Как было описано в предыдущем разделе, в состав четных циклов NFAS входят биты, зарезервированные под задачи национального использования — бит А и биты Sn4, Sn5, Sn6, Sn7, Sn8. Именно эти биты используются для передачи различных сообщений о неисправностях в цифровой систем передачи. Биты Sn образуют своего рода канал управления, ресурсы которого используются сетевым уровнем Е1. Помимо битов Sn для передачи сообщений о неисправностях могут использоваться биты XXYX MFAS.
Эти биты используются главным образом для передачи сигналов о неисправностях в сверхцикловой структуре Е1 (так бит Y непосредственно и определяется как индикатор неисправности MFAS на удаленном конце). Бит А (иногда он называется также Sn3) представляет собой бит оперативного сигнала о неисправности. В случае возникновения существенной неисправности, требующей оперативного вмешательства, бит А становится равным единице. Такую существенную неисправность называют RDI (Remote Defect Indication — Индикация дефекта на удаленном конце).
В случае возникновения так называемого «не оперативного» сигнала неисправности, система передачи генерирует NFAS с инверсией бита Sn4 с 0 на 1. Рекомендации ITU-T устанавливают следующие возможные причины генерации такого сигнала:
• В случае, если параметр ошибки BER в FAS становится хуже, чем 10(-3)
• В случае неисправности в цепи питания кодека
• В случае, если потерян входной сигнал или имеет место сбой цикловой синхронизации
Неоперативный сигнал о неисправности дает возможность получения информации о значительном увеличении параметра ошибки на стороне передатчика. Оборудования приемника обычно имеет установленные пороговые значения для генерации сигнала Sn4. В случае увеличения параметра ошибки более порога приемник генерирует сигнал «неоперативной» неисправности в направлении передатчика. При получении этого сигнала система управления может перевести передачу на резервный канал Е1, за счет чего достигается высокое качество связи.
Биты Sn5, Sn6, Sn7, Sn8 образуют служебный канал передачи данных емкостью 2 кбит/с, который может использоваться для передачи сигналов о неисправностях. В последнее время в связи с развитием систем управления (в частности платформы TMN) возможности этого канала используется довольно широко. Речь здесь идет именно о канале, поскольку в этом случае важно не абсолютное значение битов Sn, а последовательность сигналов, генерируемых в этих битах. Каждый бит образует так называемый «вертикальный протокол», т. е. сообщение о неисправности передается не одним, а несколькими последовательными битами Sn.
Тип передаваемых сообщений и алгоритм их генерации устанавливается национальными стандартами, производителями оборудования или специальными требованиями (например, операторов ведомственных сетей). Наибольшее распространение получил стандарт ETS 300-233, определяющий использование битов Sn в мультиплексорах PRI ISDN. Генерируемые и принимаемые оборудованием сообщения могут успешно использоваться системами управления, которые работают на принципах анализа именно этих сообщений. Таким образом, сообщения о неисправностях представляют собой базу для создаваемых систем управления, их количество непосредственно определяет максимальный уровень интеллектуальности системы управления и перечень параметров, доступных для контроля сети.
Просмотров: 21972 |
Дата: 2023-06-24 |
Добавил
: Dima
|
Автор
: Дмитрий
Добавлять комментарии могут только зарегистрированные пользователи.
[
Регистрация
|
Вход
]
В цифровой передаче , количество битовых ошибок является количеством принятых бит одного потока данных над каналом связи , которые были изменены из — за шум , помехи , искажений или битой синхронизацию ошибок.
Коэффициент битовых ошибок ( BER ) — это количество битовых ошибок в единицу времени. Коэффициент битовых ошибок (также BER ) — это количество битовых ошибок, деленное на общее количество переданных битов за исследуемый интервал времени. Коэффициент битовых ошибок — это безразмерная мера производительности, часто выражаемая в процентах .
Бита вероятность ошибка р е является ожидаемым значением коэффициента ошибок по битам. Коэффициент битовых ошибок можно рассматривать как приблизительную оценку вероятности битовых ошибок. Эта оценка точна для длительного интервала времени и большого количества битовых ошибок.
Пример
В качестве примера предположим, что эта переданная битовая последовательность:
0 1 1 0 0 0 1 0 1 1
и следующая полученная битовая последовательность:
0 0 1 0 1 0 1 0 0 1,
Количество битовых ошибок (подчеркнутые биты) в этом случае равно 3. BER — это 3 неверных бита, разделенных на 10 переданных битов, в результате чего BER составляет 0,3 или 30%.
Коэффициент ошибок пакета
Коэффициент ошибок пакетов (PER) — это количество неправильно принятых пакетов данных, деленное на общее количество принятых пакетов. Пакет объявляется некорректным, если хотя бы один бит ошибочен. Ожидаемое значение PER обозначается вероятностью ошибки пакета p p , которая для длины пакета данных N бит может быть выражена как
-
 ,
,

предполагая, что битовые ошибки не зависят друг от друга. Для малых вероятностей битовых ошибок и больших пакетов данных это примерно

Подобные измерения могут быть выполнены для передачи кадров , блоков или символов .
Факторы, влияющие на BER
В системе связи на BER на стороне приемника могут влиять шум канала передачи , помехи , искажения , проблемы битовой синхронизации , затухание , замирания из-за многолучевого распространения беспроводной связи и т. Д.
BER может быть улучшен путем выбора сильного уровня сигнала (если это не вызывает перекрестных помех и большего количества битовых ошибок), путем выбора медленной и надежной схемы модуляции или схемы линейного кодирования , а также путем применения схем канального кодирования , таких как избыточные коды прямого исправления ошибок. .
КОБ передачи является количество обнаруженных битов , которые являются неправильными до коррекции ошибок, разделенных на общее количество переданных битов ( в том числе избыточных кодов ошибок). Информация КОБ , примерно равна вероятности ошибки декодирования , это число декодированных битов , которые остаются неправильно после коррекции ошибок, деленное на общее число декодированных битов (полезная информация). Обычно BER передачи больше, чем BER информации. На информационный BER влияет сила кода прямого исправления ошибок.
Анализ BER
BER можно оценить с помощью стохастического ( Монте-Карло ) компьютерного моделирования. Если предполагается простая модель канала передачи и модель источника данных , BER также может быть вычислен аналитически. Примером такой модели источника данных является источник Бернулли .
Примеры простых моделей каналов, используемых в теории информации :
- Двоичный симметричный канал (используется при анализе вероятности ошибки декодирования в случае непакетных битовых ошибок в канале передачи)
- Канал аддитивного белого гауссова шума (AWGN) без замирания.
Наихудший сценарий — это полностью случайный канал, в котором шум полностью преобладает над полезным сигналом. Это приводит к BER передачи 50% (при условии, что предполагается источник двоичных данных Бернулли и двоичный симметричный канал, см. Ниже).
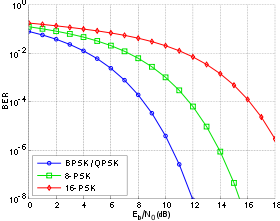

В канале с шумом BER часто выражается как функция нормированного показателя отношения несущей к шуму, обозначаемого Eb / N0 (отношение энергии на бит к спектральной плотности мощности шума) или Es / N0 (энергия на символ модуляции для спектральная плотность шума).
Например, в случае QPSK модуляции и канал АБГШ, КОБ в зависимости от Eb / N0 определяется по формуле:
.

Люди обычно строят кривые BER для описания производительности цифровой системы связи. В оптической связи обычно используется зависимость BER (дБ) от принимаемой мощности (дБм); в то время как в беспроводной связи используется BER (дБ) по сравнению с SNR (дБ).
Измерение коэффициента ошибок по битам помогает людям выбрать подходящие коды прямого исправления ошибок. Поскольку большинство таких кодов исправляют только перевороты битов, но не вставки или удаления битов, метрика расстояния Хэмминга является подходящим способом измерения количества битовых ошибок. Многие кодеры FEC также непрерывно измеряют текущий BER.
Более общий способ измерения количества битовых ошибок — это расстояние Левенштейна . Измерение расстояния Левенштейна больше подходит для измерения характеристик сырого канала перед кадровой синхронизацией , а также при использовании кодов коррекции ошибок, предназначенных для исправления вставки и удаления битов, таких как коды маркеров и коды водяных знаков.
Математический проект
BER — это вероятность неправильной интерпретации из-за электрического шума . Рассматривая биполярную передачу NRZ, мы имеем

 для «1» и для «0». Каждый из и имеет период .
для «1» и для «0». Каждый из и имеет период .




Зная, что шум имеет двустороннюю спектральную плотность ,

является 
и есть .

Возвращаясь к BER, у нас есть вероятность неправильного толкования .

 и
и 
где — порог принятия решения, установленный в 0, когда .


Мы можем использовать среднюю энергию сигнала, чтобы найти окончательное выражение:


± §
Проверка коэффициента битовых ошибок
BERT или тест на частоту ошибок по битам — это метод тестирования схем цифровой связи, в котором используются заранее определенные шаблоны нагрузки, состоящие из последовательности логических единиц и нулей, сгенерированных генератором тестовых шаблонов.
BERT обычно состоит из генератора тестовых шаблонов и приемника, который может быть настроен на один и тот же шаблон. Их можно использовать парами, по одному на любом конце линии передачи, или по отдельности на одном конце с кольцевой проверкой на удаленном конце. BERT обычно представляют собой автономные специализированные инструменты, но могут быть основаны на персональном компьютере . При использовании количество ошибок, если таковые имеются, подсчитывается и представляется в виде отношения, например 1 на 1 000 000 или 1 на 1e06.
Распространенные типы стресс-паттернов BERT
- PRBS ( псевдослучайная двоичная последовательность ) — псевдослучайный двоичный секвенсор из N бит. Эти последовательности шаблонов используются для измерения джиттера и глаз-маски TX-данных в электрических и оптических каналах передачи данных.
- QRSS (квазислучайный источник сигнала) — псевдослучайный двоичный секвенсор, который генерирует каждую комбинацию 20-битного слова, повторяет каждые 1048 575 слов и подавляет последовательные нули не более чем до 14. Он содержит последовательности с высокой плотностью, последовательности с низкой плотностью, и последовательности, которые меняются от низкого к высокому и наоборот. Этот шаблон также является стандартным шаблоном, используемым для измерения джиттера.
- 3 из 24 — шаблон содержит самую длинную строку последовательных нулей (15) с самой низкой плотностью (12,5%). Этот шаблон одновременно подчеркивает минимальную плотность единиц и максимальное количество последовательных нулей. Формат кадра D4 3 из 24 может вызвать желтый аварийный сигнал D4 для цепей кадра в зависимости от выравнивания одного бита с кадром.
- 1: 7 — Также упоминается как 1 из 8 . Он имеет только один в восьмибитной повторяющейся последовательности. Этот шаблон подчеркивает минимальную плотность 12,5% и должен использоваться при тестировании средств, установленных для кодирования B8ZS, поскольку шаблон 3 из 24 увеличивается до 29,5% при преобразовании в B8ZS.
- Мин. / Макс. — последовательность быстрого перехода узора с низкой плотности на высокую. Наиболее полезно при усилении функции ALBO ретранслятора .
- Все единицы (или отметка) — шаблон, состоящий только из единиц. Этот шаблон заставляет повторитель потреблять максимальное количество энергии. Если постоянный ток к ретранслятору отрегулирован должным образом, ретранслятор не будет иметь проблем с передачей длинной последовательности. Этот образец следует использовать при измерении регулирования мощности диапазона. Шаблон «все единицы без рамки» используется для обозначения AIS (также известного как синий сигнал тревоги ).
- Все нули — шаблон, состоящий только из нулей. Это эффективно при поиске оборудования, неправильно настроенного для AMI , такого как низкоскоростные входы мультиплексного волокна / радио.
- Чередование нулей и единиц — шаблон, состоящий из чередующихся единиц и нулей.
- 2 из 8 — шаблон содержит не более четырех последовательных нулей. Он не вызовет последовательность B8ZS, потому что для подстановки B8ZS требуется восемь последовательных нулей. Схема эффективна при поиске оборудования, не использованного для B8ZS.
- Bridgetap — разветвления моста в пределах пролета можно обнаружить с помощью ряда тестовых шаблонов с различной плотностью единиц и нулей. Этот тест генерирует 21 тестовую таблицу и длится 15 минут. Если возникает ошибка сигнала, на участке может быть один или несколько ответвлений моста. Этот шаблон эффективен только для участков T1, которые передают необработанный сигнал. Модуляция, используемая в пролетах HDSL, сводит на нет способность шаблонов моста обнаруживать ответвления моста.
- Multipat — этот тест генерирует пять часто используемых тестовых шаблонов, позволяющих проводить тестирование диапазона DS1 без необходимости выбирать каждый тестовый шаблон отдельно. Шаблоны: все единицы, 1: 7, 2 из 8, 3 из 24 и QRSS.
- T1-DALY и 55 OCTET — Каждый из этих шаблонов содержит пятьдесят пять (55) восьмибитовых октетов данных в последовательности, которая быстро изменяется между низкой и высокой плотностью. Эти паттерны используются в основном для нагрузки на схему ALBO и эквалайзера, но они также усиливают восстановление синхронизации. 55 OCTET имеет пятнадцать (15) последовательных нулей и может использоваться только без рамки без нарушения требований к плотности. Для сигналов с фреймами следует использовать шаблон T1-DALY. Оба шаблона вызовут код B8ZS в схемах с опцией для B8ZS.
Тестер коэффициента битовых ошибок
Тестер коэффициента ошибок по битам (BERT), также известный как «тестер коэффициента ошибок по битам» или решение для тестирования коэффициента ошибок по битам (BERT), представляет собой электронное испытательное оборудование, используемое для проверки качества передачи сигнала отдельных компонентов или целых систем.
Основные строительные блоки BERT:
- Генератор шаблонов , который передает определенный тестовый шаблон в ИУ или тестовую систему.
- Детектор ошибок, подключенный к DUT или тестовой системе, для подсчета ошибок, генерируемых DUT или тестовой системой.
- Генератор тактовых сигналов для синхронизации генератора шаблонов и детектора ошибок
- Анализатор цифровой связи не является обязательным для отображения переданного или принятого сигнала.
- Электрооптический преобразователь и оптико-электрический преобразователь для проверки сигналов оптической связи.
Смотрите также
- Пакетная ошибка
- Код исправления ошибок
- Секунда с ошибкой
- Частота ошибок Витерби
использованная литература
![]() Эта статья включает материалы, являющиеся общественным достоянием, из документа Управления общих служб : «Федеральный стандарт 1037C» .(в поддержку MIL-STD-188 )
Эта статья включает материалы, являющиеся общественным достоянием, из документа Управления общих служб : «Федеральный стандарт 1037C» .(в поддержку MIL-STD-188 )
внешние ссылки
- QPSK BER для канала AWGN — онлайн-эксперимент
Не все сетевые инженеры понимают влияние ошибок интерфейса на производительность сетей, базирующихся на протоколе TCP. И хотя это может не быть интуитивно понятно с первого взгляда, ошибки интерфейса способны оказывать ОЧЕНЬ БОЛЬШОЕ влияние. Недавно мы указали клиенту на некоторые интерфейсы с очень большим количеством ошибок, особо отметив тот факт, что линии с наибольшим процентом потерь, вероятно, пропускают очень мало полезных данных. Поэтому следует исследовать причину этих ошибок. Сначала заказчик не выглядел обеспокоенным, поскольку уровень ошибок был ниже 3%. Однако лично мы считаем, что частота возникновения ошибок более 0,001% уже должна вызывать беспокойство.
Данная статья основана на этом опыте и призвана проиллюстрировать влияние ошибок интерфейса на производительность сети.
Ожидаемая наилучшая производительность TCP/IP
Первый вопрос, который следует рассмотреть: «Какую максимальную производительность TCP/IP можно ожидать от канала Gigabit Ethernet в кампусе?».
Прежде всего, давайте посмотрим на необходимую для TCP буферизацию, которая является следствием задержки полосы пропускания (BDP). При использовании канала Gigabit Ethernet буферизация, необходимая принимающей системе для обеспечения максимальной производительности, представляет собой объем данных, который может передаваться между получаемыми подтверждениями приема (ACK). Пропускная способность гигабитного канала составляет 1000 Мбит/с. Если обмен данными происходит внутри кампуса, например, между сервером центра обработки данных и пользователем, время приема-передачи (время двойного прохождения, RTT) должно быть очень маленьким, скажем, 2 миллисекунды или 0,002 секунды. Итак, для гигабитного канала принимающая система должна иметь возможность буферизовать количество данных, равное произведению полосы пропускания на задержку:
BDP = 1000 Мбит/с × 0,002 секунды
BDP = 1000 Мбит/с (1 байт / 8 бит) × 0,002 секунды
BDP = 125 000 000 байт × 0,002 секунды
BDP = 250 000 байт
Если значение BDP меньше размера окна TCP, полоса пропускания тракта является ограничивающим фактором пропускной способности. Для канала Gigabit Ethernet значение BDP 250 000 байт больше, чем окно TCP по умолчанию, равное 32 000 байт (размер окна TCP по умолчанию), поэтому полоса пропускания тракта не будет ограничивающим фактором.
Если же размер окна TCP меньше необходимой для сохранения заполнения канала буферизации, механизм работы TCP влияет на максимальную пропускную способность. В этом случае передающая система отправляет данные всего окна TCP, ожидает подтверждения от получателя, а затем снова осуществляет передачу. Приложение не использует механизм окна отправки, который позволил бы TCP заполнить полосу пропускания канала. Новые данные можно отправлять только после получения подтверждения (ACK). Следовательно, максимальная пропускная способность, которая доступна для источника и получателя, представляет собой размер окна, деленный на время, необходимое для возврата подтверждения ACK (то есть время двойного прохождения). В этом случае лучшая пропускная способность, которой можно достичь — это размер блока (количество данных, отправленных в одно окно), деленный на время двойного прохождения или
Максимальная пропускная способность = размер блока / RTT
Максимальная пропускная способность в бит/с = [байт × 8 (бит в байте)] / RTT
Также следует рассмотреть еще один вопрос: «Какова максимальная пропускная способность канала GE в центре обработки данных?»
Для проведения данного расчета предположим, что приложение отправляет фрагмент данных размером 64 000 байт по нескольким сегментам TCP и ожидает получения подтверждения (ACK) перед отправкой следующей порции данных. Если обмен данными происходит внутри кампуса, например, между сервером центра обработки данных и пользователем, время двукратного прохождения (RTT) должно быть очень маленьким, возможно, 2 миллисекунды или 0,002 секунды. Поэтому максимальная скорость для передачи одного файла будет
64000 × 8 / 0,002 = 256000000 бит/с или 256 Мбит/с
Вывод: если время двукратного прохождения (RTT) составляет 2 мс, в кампусе возможна максимальная скорость канала Gigabit Ethernet около 256 Мбит/с.
Ожидаемая производительность TCP/IP с ошибками
Третьим рассматриваемым вопросом является: «Какое влияние на производительность TCP/IP на канале Gigabit Ethernet в кампусе оказывают ошибки?»
Примечание. Существует несколько потенциальных источников ошибок интерфейса, включая его отбрасывание при недостаточной для поддержки объема передаваемого трафика пропускной способности, неверно настроенные дуплексный режим и скорость, чрезмерную буферизацию на интерфейсах, неправильно настроенные каналы EtherChannels, а также неисправности кабелей или оборудования.
Сначала рассмотрим допустимую частоту ошибок. В соответствии со стандартами IEEE 802.3ab приемлемым для 1000BaseT коэффициентом битовых ошибок (BER) считается одна ошибка на 1010 битов.
Потеря 1 бита за 1 × 1010 бит/сек = потеря 1 бита на 1,25 × 109 байт в секунду
Если предположить, что средний пакет имеет длину 1000 байт, показатель BER для 1000BaseT будет составлять потерю одного пакета из 1,25 × 106 пакетов. В процентном выражении один потерянный пакет из 1,25 × 106 = 8 × 10-7 = 0,00008%. Это значение можно округлить и действительно ожидать в кабеле Gigabit Ethernet потери не более 0,0001% пакетов.
Примечание. Это пакет очень большого размера. Более распространенным средним значением пакета для предприятий, включая VoIP, скорее может быть размер от 300 до 450 байт. Однако размер пакета 1000 байт был выбран для упрощения расчетов.
Однако потеря пакетов в каналах TCP может происходить и из-за проблем с производительностью и конфигурацией серверов и сетевых устройств. Из-за того, что пакеты теряются и их необходимо передавать повторно, производительность TCP снижается. Фактическое влияние потерь на максимальную пропускную способность определяется уравнением Матиса:
Максимальная скорость в бит/с < (MSS/RTT) × (1/квадратный корень (p)),
где
- MSS = максимальный размер сегмента в байтах
- RTT = время двойного прохождения (приема-передачи) в секундах
- p = вероятность потери пакета
Обратите внимание, что эта формула включает константу со значением, равным приблизительно 1, преобразующую байты в биты… Эта формула известна как уравнение Матиса из статьи 1997 года под названием «The Macroscopic Behavior of the TCP Congestion Avoidance Algorithm» (Очевидные особенности алгоритма предотвращения перегрузки TCP).
Теперь мы можем применить уравнение Матиса к рассматриваемому в примере каналу GE. Для MSS используем значение 1460 байт, так как такой объем данных умещается в один пакет TCP (когда MTU (максимальный блок передачи) сетевого оборудования составляет 1500 байт). Предположим, что приложение будет передавать блок данных размером 1460 байт и перед отправкой следующих данных ожидать подтверждения (ACK). Поскольку подобный обмен данными происходит внутри кампуса, снова предположим, что значение RTT составляет 0,002 секунды. Таким образом, максимальная скорость передачи одного файла со стандартным значением BER для кабеля 1000BaseT с потерями 0,0001% будет:
Максимальная скорость в соответствии с уравнением Матиса в бит/с < (MSS/RTT) × (1/квадратный корень (p))
Максимальная скорость в бит/с < (1460/0,002) × (1/квадратный корень (0,000001))
Максимальная скорость в бит/с < 7,3 × 108 бит/с
Максимальная скорость в бит/с < 730 Мбит/с
Прогнозируемая по уравнению Матиса скорость превышает максимальную скорость 256 Мбит/с, которая была рассчитана без учета потерь, поэтому максимальной скоростью будет меньшее из двух рассчитанных значений, то есть 256 Мбит/с. Это разумный результат, поскольку каналы, соответствующие допустимому значению BER для Gigabit Ethernet, не оказывают отрицательного воздействия на производительность TCP.
Что происходит на нашем пороговом уровне беспокойства? В этом случае потери составляют 0,001%, или 1 пакет из 100000.
Максимальная скорость в соответствии с уравнением Матиса в бит/с < (MSS/RTT) × (1/квадратный корень (p))
Максимальная скорость в бит/с < (1460/0,002) × (1/квадратный корень (0,00001))
Максимальная скорость в бит/с < 2,3 × 108 бит/с
Максимальная скорость в бит/с < 231 Мбит/с
Поскольку полученное значение находится в пределах 10% от прогнозируемых 256 Мбит/с, его можно считать «приемлемым». Однако давайте посмотрим, что произойдет, если в линии будут потери 0,01% или 1 потерянный пакет из 10 000 пакетов?
Максимальная скорость в соответствии с уравнением Матиса в бит/с < (MSS/RTT) × (1/квадратный корень (p))
Максимальная скорость в бит/с < (1460/0,002) × (1/квадратный корень (0,0001))
Максимальная скорость в бит/с < 7,3 × 107 бит/с
Максимальная скорость в бит/с < 73 Мбит/с
Это значительно ниже прогнозируемых 256 Мбит/с. Подобное снижение скорости окажет заметное влияние на производительность приложения.
Мысленно вернувшись в начало статьи, вспомним о значении 3% и посмотрим, на что влияет такой уровень ошибок? Если использовать коэффициент ошибок в 3%, максимальная пропускная способность канала Gigabit Ethernet резко снизится:
Максимальная скорость в соответствии с уравнением Матиса в бит/с < (MSS/RTT) × (1/квадратный корень (p))
Максимальная скорость в бит/с < (1460/0,002) × (1/квадратный корень (0,02))
Максимальная скорость в бит/с < 4,2 × 106 бит/с
Максимальная скорость в бит/с < 4,2 Мбит/с
Такое резкое снижение скорости может легко привести к снижению производительности приложений.
Выводы
Теперь вы понимаете влияние ошибок интерфейса на пропускную способность TCP. Четко видно, что производительность системы между хостами быстро снижается. Поэтому любая частота ошибок интерфейса, превышающая 0,01%, должна вызывать тревогу и становиться поводом для немедленного проведения исследования и устранения причины. Надеюсь, что все вышеизложенное помогло объяснить, почему ошибки интерфейса должны вызывать такое беспокойство!
Появились вопросы или нужна консультация? Обращайтесь!
Вечный параноик, Антон Кочуков.
См. также: