6 error messages, Error messages, P.90) – BECKHOFF AX2500 User Manual
Page 90
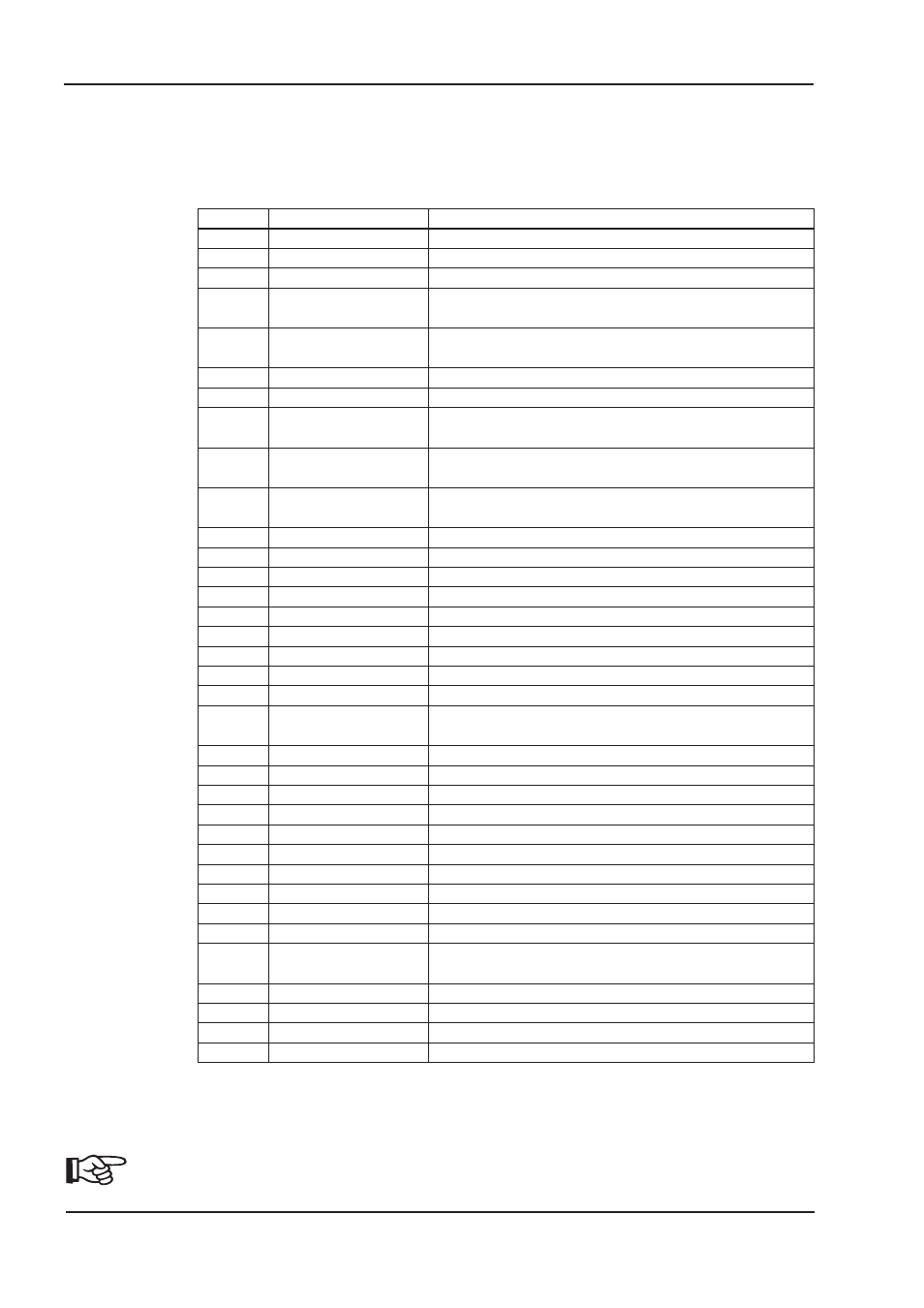
Any errors that occur are shown in coded form by an error number in the LED display on
the front panel. All error messages result in the BTB/RTO contact being opened, the out-
put stage being switched off (motor loses all torque), and the holding brake is activated.
Status messages, no error, see p. 89
Updating the startup configuration
no error on the selected axis module
Heat sink temperature
Heat sink temperature too high
limit is set by manufacturer to 80°
Overvoltage in DC bus link
limit depends on the electrical supply voltage
Message from the position controller
Cable break, short-circuit, short to ground
Undervoltage in DC bus link
limit is set by manufacturer to 100V
Motor temperature too high or temp. sensor defect
limit is set by manufacturer to 145°C
Internal amplifier supply voltages are out of tolerance
Motor runs away, speed is too high
Cable break, short-circuit, short to ground
Motor phase missing (cable break or similar)
Internal temperature too high
Fault in the power output stage
I²t maximum value exceeded
2 or 3 phases missing in the mains supply feed
Error in the analog-digital conversion, normally caused
by extreme electromagnetic interferences.
Regen circuit faulty or incorrect setting
A phase is missing in the mains supply power feed
Slot error (hardware fault on interface card)
Software error on the interface card
Severe CAN bus communication error
Warning is displayed as fault
Homing error (hardware limit switch activated)
External position profile generator created a step, that
exceeded the maximum value
only in SERCOS systems
Timeout emergency stop
Macro program error
system software not responding correctly
* = these error messages can be cleared without a reset, by using the ASCII command
CLRFAULT. If only one of these errors is present and the RESET button or the I/O
RESET function is used, only the CLRFAULT command will be executed.
More information to the messages can be found in the ASCII Object Reference
(Online Help), see parameter ERRCODE. Hints for removal can be found in the
Online help chapter «Trouble-Shooting».
Источник
Ремонт электродвигателей Beckhoff
Ремонт электродвигателей Beckhoff в Нефтечале является одним из основных направлений сервисного центра «Кернел». Электромоторы работают с частотными преобразователями и сервоприводами Beckhoff. Самыми распространенными сериями электродвигателей Beckhoff ремонт которых предлагает наша компания являются:
- Beckhoff AM series
- Beckhoff AMP series
- Beckhoff AG series
- Beckhoff IMI series
Электромоторы данного производителя имеют высокие параметры по перегрузкам, а также динамике и широким диапазоном крутящего момента от 0.18HM до 1650HM.
Электродвигатели Beckhoff отличаются энкодерами, способами охлаждения, классом защиты, встроенного стояночного тормоза и т. п. Двигатели Beckhoff часто встречаются на станках с числовым программным управлением (ЧПУ)
В процессе работы рано или поздно (зависит то эксплуатационных режимов) промышленное оборудование выходит из строя, ремонт электродвигателей Beckhoff единственное экономически выгодное решение.
Специалисты сервисного центра «Кернел» более 20 лет проводят качественный ремонт электродвигателей Beckhoff и другого промышленного оборудования. Для максимально быстрого, а главное качественного восстановления электромоторов Beckhoff потребуется специализированное помещение, оборудованное необходимым оборудованием расходные материалы и компоненты для ремонта электродвигателей и конечно же квалифицированный персонал.
Благодаря вышеперечисленному ремонт электродвигателей Beckhoff в Нефтечале проводится согласно всем техническим требованиям, в сжатые сроки. Каждый ремонт электродвигателей Beckhoff завершается проверкой на специализированном стенде с приводами Beckhoff ACS400 в условиях максимально приближенных реальным.
Что входит в ремонт электродвигателей Beckhoff
Для восстановления работоспособности дорогостоящего промышленного оборудования инженеры компании выполняют последовательно все технологические шаги. В ремонт электродвигателей Beckhoff в Нефтечале входит:
- Внутренняя и внешняя очистка двигателя
- Изоляция обмоток электродвигателя
- Перемотка силовых обмоток электродвигателя Beckhoff
- Пролачивание и сушка обмоток электродвигателя
- Токарные работы (восстановление посадочного места подшипника)
- Замена подшипника электродвигателя
- Замена клеммников, силовых и сигнальных разъёмов
- Ремонт датчиков обратной связи (энкодера, резольвера)
- Изготовление и замена муфты энкодера
- Юстировка положения датчиков обратной связи (энкодера / резольвера)
Ошибки и неисправности двигателей Beckhoff
Неисправности двигателей Beckhoff
Самые распространенные неисправности двигателей Beckhoff:
- Неисправность датчиков обратной связи (энкодер, резольвер, тахогенератор);
- Сбито юстировочное положение энкодера двигателя;
- Неисправность обмоток статора. (межвитковое замыкание, пробой изоляции на корпус и обрыв);
- Износ подшипников их заклинивание;
- Износ посадочных мест подшипников на фланцах серводвигателя;
- Износ сальников;
- Износ тормозной системы;
- Размагничивание магнитов на роторе, потеря магнитных свойств;
- Разрушение корпуса двигателя (механические повреждения или из-за работы в агрессивной среде) разъёмов;
- Выход из строя термодатчика.
Ошибки электродвигателя Beckhoff
В момент аварийного останова электромотора частотный преобразователь или сервопривод в паре с которым работает двигатель выдаст код ошибки, расшифровав которую станет ясно что случилось с двигателем и какой ремонт потребуется.
Все возможные ошибки двигателя Beckhoff, генерируемые сервоприводом серии AX5000 вы можете скачать с нашего сайта в удобном формате PDF
Все возможные ошибки электродвигателя Beckhoff при работе с сервоприводом AX5000, AX5101, AX5103, AX5106, AX5112, AX5118, AX5125, AX5140, AX5160, AX5172, AX5190, AX5191, AX5192, AX5193, AX5201, AX5203, AX5206
Перемотка электродвигателей Beckhoff
Перемотка электродвигателей Beckhoff сложная и кропотливая работа под силу только настоящим профессионалам своего дела и конечно же обязательно наличие специализированных помещений и расходных материалов. Залог любого успешного ремонта — это квалифицированный специально обученный персонал и конечно же материальное оснащение обладая всем вышеперечисленным мы гарантируем качество выполненных работ по перемотке электродвигателей Beckhoff.
Нет смысла перечислять все возможные сферы промышленности где работает данное промышленное оборудование, мы просто не найдем ни чего подобного. Электродвигатели Beckhoff работают как в нормальных условиях, так и в крайне агрессивных средах, что приводит к частому выходу из строя оборудования, это может быть короткое межвитковое замыкание в результате попадания скажем охлаждающей жидкости на обмотки электродвигателя либо это может быть вызвано механическим износом, когда подшипник вырабатывает свой ресурс.
Специалисты нашей компании в максимально кратчайшие сроки выполнят перемотку электродвигателя Beckhoff в Нефтечале, мы делаем все возможные виды ремонта электродвигателей Beckhoff, такие как:
- Чистка внешнего корпуса электродвигателя;
- Ремонт смазочной системы, замена смазки;
- Ремонт протяжка и замена рефлекторных крепежных соединений;
- Проверка крепления вентилятора;
- Перемотка статора электромотора;
- Перемотка ротора двигателя;
- Покрытие лаком лобовых обмоточных частей
- Ремонт якоря электродвигателя;
- Ремонт статора электромотора;
- Восстановление вала и посадочных мест;
- Замена подшипников и сальников;
- Токарные и фрезерные работы;
- Проверка двигателя без нагрузки и с нагрузкой.
Ремонт и настройка энкодера и резольвера Beckhoff
Ремонт энкодера необходим при износе подшипников, так как это влечет за собой потерю точности датчика и в самом плохом развитии событий из-за разбитых подшипников может пострадать самая важная часть энкодера, кодирующие стекло. Помимо данной неисправности датчика угла поворота:
- Грязное кодирующие стекло или диск;
- Поломка, неисправность сигнального разъема;
- Не правильная форма сигналов или их отсутствие;
- Наличие внутренней ошибки (для абсолютных энкодеров);
- Замыкание в электросхеме энкодера.
Также влечет за собой ремонт энкодера.
Ремонт резольвера необходим в следующих случаях:
- Обрыв одной из статорных (неподвижная часть) обмоток резольвера;
- Обрыв одной из обмоток ротора (вращающаяся часть) резольвера;
- Межвитковое замыкание одной из обмоток. Обычно происходит в части обмоток;
- Сбита позиция резольвера на двигателе.
Мы предлагаем не просто квалифицированный ремонт энкодера и резольвера в сжатые сроки, а также дополнительную экономию бюджета 60%-80% от стоимости нового датчика обратной связи. На все виды ремонта мы даем 6-и месячную гарантию
Ремонтом энкодера, на данный момент занимаются далеко не все организации предлагающие услуги по ремонту промышленного оборудования, в связи с крайне сложным процессом ремонта и последующей настройки энкодера.
Сервисный центр «Кернел» предоставляет услуги по ремонту подобного сложного промышленного оборудования как энкодеры и резольверы.
Ремонт электродвигателей Beckhoff, распространенные типы
Не полный список двигателей Beckhoff ремонт которых предлагает наш сервисный центр. На ряду с простыми электродвигателями мы востанавливаем и двигатели имеющие обратную связь (серводвигатели).
| Двигатель | Тип |
|---|---|
| Beckhoff | AM3044-1G01-0000; AM3062-1K01-0000; AG2800-+HDV015Z-MF2-70-1C1-AM883x; AM3052-0K31-0000; AM3042-1G00-0000; AG2300-+SP240S-MF1-10-0O1-AM308x; AG2300-+SP240S-MF2-28-0M1-AM308x; AG2800-+HDV015Z-MF2-50-1C1-AM883x; AG2300-+SP240S-MC2-100-0M1-AM806x; AG2300-+SP060S-MF1-7-1C1-AM803x; AG2300-+SP060S-MF2-16-0B1-AM802x; AG2300-+SP060S-MF2-28-0C1-AM803x; AG2300-+SP060S-MF2-35-1C1-AM803x; AG2250-+WPLE40-M01-4-1B1-AS1020; AG2250-+WPLE40-M01-5-1B1-AM811x; AG2250-+WPLE40-M01-7-1B1-AM811x; AG2250-+WPLE40-M01-7-1B1-AS1050; AG2250-+PLE40-M02-12-1B1-AM811x; AG2250-+PLE40-M02-12-1B1-AM812x; AG2250-+PLE40-M02-16-0B1-AM812x; AG2250-+PLE40-M02-16-1B1-AM312x; AG2250-+PLE40-M02-20-0B1-AM811x; AG2250-+PLE40-M02-16-1B1-AM812x; AG2250-+PLE40-M02-20-1B1-AM312x; AG2250-+PLE40-M02-20-0B1-AM812x; AG2210-+LP120S-MF2-50-1I1-AM803x; AG2210-+LP120S-MF2-50-1I1-AM806x; AG2210-+LP120S-MF2-9-0I1-AM305x; AG2210-+LP120S-MF2-9-1I1-AM804x; AG2210-+LP120S-MF1-4-0I1-AM805x; AG2210-+LP120S-MF1-4-0I1-AM806x; AG2210-+LP120S-MF1-4-1I1-AM805x; AG2210-+LP120S-MF1-5-0I1-AM806x; AG2210-+LP120S-MF1-7-0I1-AM806x; AG2210-+LP120S-MF2-100-0I1-AM803x; AM8851-0D20-0050; AM8851-0D21-0030; AG2210-+LP070S-MF2-100-1D1-AM802x; AG2210-+LP070S-MF2-12-0D1-AM803x; AG2210-+LP070S-MF2-15-1D1-AM802x; AG2210-+LP070S-MF2-15-1D1-AS1060; AM8851-0E21-1003; AM8852-0E22-2100; AM8852-0F21-0010; AM8852-1E11-2100; AM8853-0F01-0030; AM8853-0F20-2030; AM8853-0F22-2100; AM8563-0K10-0000; AM8563-0K20-0000; AM8563-0L1A-0000; AM8563-0L2A-0000; AM8563-0N10-0000; AM8563-0N20-0000; AM8563-0NA0-0000; AM8563-0Q0A-0000; AM8563-0Q1A-0000; AM8563-0Q2A-0000; AM8563-0R10-0000; AM8563-0T1A-0000; AM8543-0EA0-0000; AM8543-0H00-0000; AM8543-0H10-0000; AM8543-0H20-0000; AM8543-0HA0-0000; AM8543-0HB0-0000; AM8543-0K00-1001; AM8543-0K10-0000; AM8543-1E10-0000; AM8543-1E20-0000; AM8033-0F00-0000; AM8033-0F20+WPLE80-15 |
Оставить заявку на ремонт электродвигателей Beckhoff
Оставить заявку на ремонт электродвигателей Beckhoff в Нефтечале можно с помощью специальной формы, которая вызывается нажатием одноименной кнопки в верхней части страницы. Все вопросы, связанные с ремонтом, перемоткой электродвигателей Beckhoff вы можете задать нашим менеджерам. Связаться с ними можно несколькими способами:
- Заказав обратный звонок (кнопка в правом нижнем углу сайта)
- Посредством чата (кнопка расположена с левой стороны сайта)
- Позвонив по номеру телефона: +7(8482) 79-78-54; +7(917) 121-53-01
- Написав на электронную почту: 89171215301@mail.ru
Вот далеко не полный список производителей промышленной электроники и оборудования, ремонтируемой в нашей компании.
Источник
Ремонт сервопривода Beckhoff в
Особенности ремонта сервоприводов Beckhoff
 Ремонт сервоприводов Beckhoff известного европейского производителя, впрочем, как и ремонт приводов, выпущенных под другими брендами, имеет ряд особенностей в силу своего конструктива. Промышленные сервопривода, точнее их начинка делятся на две части:
Ремонт сервоприводов Beckhoff известного европейского производителя, впрочем, как и ремонт приводов, выпущенных под другими брендами, имеет ряд особенностей в силу своего конструктива. Промышленные сервопривода, точнее их начинка делятся на две части:
- Аппаратная часть,
- Программная часть.
Приводы Beckhoff как и все остальные не являются исключением из правил, именно поэтому ремонт сервопривода Beckhoff имеет точно такой же ряд особенностей, как и у других преобразователей.
Диагностировать ту или иную неисправность помогают коды ошибок частотного преобразователя, которые отображаются на небольшом дисплее, расположенном на лицевой панели привода или выводятся на удаленный монитор.
Ремонт сервоприводов Beckhoff в , впрочем, как и любых других частотников выпущенных под другими брендами всегда начинается с аппаратной части, после успешного ремонта аппаратной части наступает очередь программной.
Настройка сервопривода Beckhoff прописана в инструкции завода производителя, для каждой серии приводов настройка будет индивидуальной, так как каждая линейка преобразователей решает свои собственные задачи, этим обусловливается широкая номенклатура данного промышленного оборудования. Но все же есть определенная последовательность настройки привода, которая относится ко всем преобразователям, независимо от бренда.
Программирование, настройка сервоприводов Beckhoff
Настройка сервопривода Beckhoff (программирование) происходит в рамках установленных производителем правил, существует общий алгоритм по программированию (настройке частотных преобразователей), относящийся ко всем производителям данного промышленного оборудования. Ниже представлена пошаговая инструкция по настройке сервоприводов Beckhoff и подобного промышленного оборудования других брендов.
- Выбор режима управления приводом (управление по показанию датчиков, дистанционное управление, дистанционное управление).
- В случае использования отдельного (выносного) монитора, настраивается вывод на него технической информации.
- Далее определяем конфигурацию подключения серводвигателя. На данной стадии задаются такие параметры как- возможность применения обратной связи либо без ее применения, а в память блока заносятся данные по: величине крутящего момента, мощности потребителей, номинальное значения частоты, напряжение, ток и скорости вращения ротора.
- Программируется минимально допустимая величина напряжения и частоты, а также время ускорения ротора от ноля до номинального значения.
- И в завершении, в программу управления сервопривода Beckhoff вносятся функциональные данные со значениями отдельных клемм и особенностями сигналов. Отмечаются действия оборудования, выполняющиеся автоматически при отсутствии информации поступающей в оперативном режиме с датчика.
Привод Beckhoff инструкция, скачать
Все настройки сервопривода Beckhoff приведены в технической документации ниже в удобном формате (PDF) который можно скачать на свой компьютер, распечатать или просто открыть на нашем сайте.
Промышленный сервопривод Beckhoff, инструкции, скачать в формате PDF.
Сервопривод Beckhoff AX2000, инструкция.
Сервопривод Beckhoff AX2040 / AX2070, инструкция.
Источник
9.6
Error messages
Any errors that occur are shown in coded form by an error number in the LED display on
the front panel. All error messages result in the BTB/RTO contact being opened, the out-
put stage being switched off (motor loses all torque), and the holding brake is activated.
Number Designation
Explanation
A/I/P/E
Status Messages
Status messages, no error, see p. 89
. . .
Status Message
Updating the startup configuration
F00
no error
no error on the selected axis module
F01*
Heat sink temperature
Heat sink temperature too high
limit is set by manufacturer to 80°
F02*
Overvoltage
Overvoltage in DC bus link
limit depends on the electrical supply voltage
F03*
Following error
Message from the position controller
F04
Feedback
Cable break, short-circuit, short to ground
F05*
Undervoltage
Undervoltage in DC bus link
limit is set by manufacturer to 100V
F06
Motor temperature
Motor temperature too high or temp. sensor defect
limit is set by manufacturer to 145°C
F07
Internal voltage
supply
Internal amplifier supply voltages are out of tolerance
F08*
Overspeed
Motor runs away, speed is too high
F09
EEPROM
Checksum error
F10
Flash-EPROM
Checksum error
F11
Brake
Cable break, short-circuit, short to ground
F12
Motor phase
Motor phase missing (cable break or similar)
F13*
Internal temperature
Internal temperature too high
F14
Output stage
Fault in the power output stage
F15
I²t max.
I²t maximum value exceeded
F16*
Supply BTB/RTO
2 or 3 phases missing in the mains supply feed
F17
A/D converter
Error in the analog-digital conversion, normally caused
by extreme electromagnetic interferences.
F18
Regen
Regen circuit faulty or incorrect setting
F19*
Supply phase
A phase is missing in the mains supply power feed
F20
Slot fault
Slot error (hardware fault on interface card)
F21
Handling error
Software error on the interface card
F22
reserved
reserved
F23
CAN-bus off
Severe CAN bus communication error
F24
Warning
Warning is displayed as fault
F25
Commutation error
Commutation error
F26
Limit switch
Homing error (hardware limit switch activated)
F27
reserved
reserved
F28
External Trajectory
External position profile generator created a step, that
exceeded the maximum value
F29
Sercos Error
only in SERCOS systems
F30
Emergency timeout
Timeout emergency stop
F31
Macro
Macro program error
F32
System Error
system software not responding correctly
* = these error messages can be cleared without a reset, by using the ASCII command
CLRFAULT. If only one of these errors is present and the RESET button or the I/O
RESET function is used, only the CLRFAULT command will be executed.
More information to the messages can be found in the ASCII Object Reference
(Online Help), see parameter ERRCODE. Hints for removal can be found in the
Online help chapter «Trouble-Shooting».
90
AX2500 Product Manual
Setup
06/2007
BECKHOFF
Вернее, чайником. То есть мною.
Напишу тут подробно, чтобы самому потом не забыть. Похоже, тут половина вещей из серии “Это нельзя понять – это надо запомнить”. Итак, я дошел до того, что софт видит контроллер и простейшая программа туда загружается и вроде бы работает. Вот как это делается.
Мы поставили TwinCAT. Для начала запускаем TwinCAT System Manager. В нем сначала найдем устройство:

В появившемся диалоге выбираем Search (Ethernet) и в диалоге поиска – Broadcast Search

Закрываем диалог, в предыдущем диалоге выделяем только что найденное устройство:

Теперь System Manager подключен к нашему контроллеру, о чем сообщает в статусбаре. Далее надо получить список устройств ввода-вывода. В ноде I/O – Configuration –> I/O Devices ткаем правой кнопкой и говорим Scan Devices:

В результате система получает полную конфигурацию устройств:

Как видно выше, перечислены все три блока подсоединенные к контроллеру, включая пустышку. Я даже могу отсюда управлять состоянием каналов вывода (выделить канал, справа закладка Online и там нажать кнопку Write):

Записал 1 в 4-й канал – на блоке вывода загорелся светодиод. Стало быть поменялось состояние. А вот канал ввода – не меняется так. Видимо, он проверяет физическое состояние (не замкнуто) и врать права не имеет. Ну да ладно.
Далее мне хочется написать простейшую программу. Если замкнут вход 1 – включить выход 1. Если разомкнут – выключить. Для этого нам понадобится другая программа – TwinCAT PLC Control (по сути – IDE CoDeSys). В ней мы создаем новый проект. Нас спрашивают под какое устройство будем писать.

Выбираем CX (ARM), потому что наш cx9010 построен на ARM процессоре. Проект состоит из программных блоков, один из которых – главный нам сразу предлагают создать:

Языков как видите может использоваться множество. Я выберу LD – язык лестничных диаграмм или релейно-контактной логики по-нашему. Сначала в верхнем окошке обьявляем переменные. Вот на этом этапе я и провел полдня. Похоже, для того, чтобы эти переменные были видны и к ним можно было привязать вводы-выводы, они должны иметь адрес. Что конкретно это означает, я пока не понимаю, но вот это вот шаманство работает. То есть для обьявления булевской переменной In01, надо написать не вот так:

А вот так:
![]()
Волшебное заклинание %IX0.1 переводится так. %-значит это адрес. I – вход (Q-выход). X – тип данных бит (true/false). 0.1 – это месторасположение в некой области переменных. Это значит 1-й бит нулевого байта.

Пишем саму прогамму. На языке LD программа – это типа две шины (справа и слева) под напряжением. Между ними можно вставлять котакты (Contact) и реле (Coil). Контакт – это вход, Coil – это выход. Можно еще блоки вставлять, но это пока опустим. Таких цепочек может быть много, но у нас пока одна будет. Вставляем контакт. И сверху пишем имя входной переменной In01.

Затем вставляем Coil и называет Out01. Вот такая получается программа:

Она как раз и говорит “Если In01 замкнут, то через Out01 идет ток и оно замыкается”. Ну и наоборот соответственно. Все, программа у нас написана. Говорим Project –> Build. Все компилится без ошибок. Рядом с файлом проекта появляется файл *.tpy который теперь можно загрузить в System Manager:

Как видите, System Manager видит обе наши переменные:

Теперь в I/O Configuration мы можем привязать каналы ввода – вывода к переменным. Выбираем канал, нажимаем Linked to и выбираем переменную:

Теперь у меня физические входы-выходы приделаны к переменным в программе. Я иду в PLC Control. Там я тоже должен сказать что работаю с физическим контроллером (Online –> Choose Rintime System:). Выбираю свой контроллер:

Затем говорю Online –> Login. Система спрашивает загружать ли программу в контроллер. Загружаем. Далее я могу сказать Online –> Run – запустить программу в контроллере. И вроде как она выполняется. Я могу поменять значение переменной In01 из PLC Control и выходная переменная Out01 тоже меняется. Только вот состояние выхода у контроллера – не меняется. Будем копать дальше.
На YouTube есть видео всего процесса и там у них все работает. Но там используется не железный контроллер, а SoftPLC – программный PLC который прямо на компе крутится.
Вот на этом этапе я, пожалуй, пока остановлюсь и пойду дегустировать разливной Newcastle – мозги беречь надо.
![6a00d8341c630a53ef0120a701fc57970b-800wi[1]](https://pics.livejournal.com/roman_eremin/pic/00029g5y "6a00d8341c630a53ef0120a701fc57970b-800wi[1]")
Сервоусилители AX5000 очень чувствительны к «качеству синхронизации» шины EtherCAT. Причина в том, что AX5000 не имеет собственного управляющего контроллера и сильно зависит от мастера шины, который к тому же хранит и обновляет параметры сервоусилителя.
EtherCAT-телеграммы (ECT) рассылаются EtherCAT-мастером (EtherCAT Master) по всем подключенным EtherCAT-подчиненным устройствам (ESC). ESC – это электронный модуль (микросхема), осуществляющий постоянный синхронный процесс обработки и/или копирования данных (содержащихся в телеграммах) через заданные интервалы времени по прерываниям таймера. Конфигурация ESC описывает, какая информация, и как, будет обработана из телеграммы. В приводных технологиях используются очень малые интервалы времени, поэтому очень важно поддерживать непрерывность и постоянность синхронности данных и подчиненных устройств в целом. Синхронность подчиненных устройств обеспечивается так называемыми «распределенными часами» (Distributed Clocks, подробнее см. документацию по EtherCAT).
EtherCAT-мастер
При включении и последующем старте системы, EtherCAT-мастер читает конфигурационный файл AX5000 и записывает «ΔT0 = 250мкс» и «ΔT1 = длительность NC-цикла» в соответствующие регистры подчиненного. ESC постоянно считывает эти значения из регистров и подает сигналы Sync0 и Sync1. Потеря или изменение содержимого этих регистров во время работы, может привести к проблеме выдачи сигналов Sync0 и Sync1.
EtherCAT-подчиненный контроллер (ESC)
ESC-контроллер для синхронизации сервоусилителя AX5000 регулярно, через промежутки времени ΔT0 и ΔT1, отправляет в процессор сервоусилителя два сигнала прерывания – Sync0 и Sync1.
Sync0
Сигнал или прерывание Sync0 генерируется каждые 250мкс. В случае ошибки, соответствующая ось переходит в состояние ожидания (стоп) с рампой «EStop ramp».
- F414 – если прерывание не проходит, то процессор генерирует код ошибки F414 (см. рисунок ниже, метка F0).
- F409 – прерывание Sync0 может быть выбрано из трех значений: 62.5мкс, 125мкс, 250мкс. При других значениях интервала генерируются ошибки F409.
- F410 – возникает, если прерывание Sync0 не активировано (не генерируется) в ESC.
- F411 – длина импульса прерывания не соответствует стандарту.
Sync1
Прерывание Sync1 рассылается со временем цикла NC-задачи (SAF). Время цикла всегда пропорционально значению частоты прерывания Sync0 и, по умолчанию, равно 1мс.
- F412 – интервал Sync1 равен времени интервала Sync0, умноженному на целое число, и должно быть идентично значению параметров S-0-0001 и S-0-0002, иначе произойдет ошибка.
- F414 – если прерывание не проходит, то процессор генерирует код ошибки F414 (см. рисунок ниже, метка F1).
- F413 – ошибка возникает, если прерывание Sync1 не активировано или не генерируется в ESC.
- F411 – длина импульса прерывания не соответствует стандарту.

Телеграмма принята (ТЧК)
ESC прочитает телеграмму (ECT), как только она поступит. Допустимый момент поступления находится непосредственно перед Sync1. Момент ТЧК (EOT) немного запаздывает после прерывания Sync1 на время ΔT2. Данные, предназначенные для ESC, затем читаются из телеграммы и записываются в область данных SyncMan-2, после чего, состояние SyncMan-2 устанавливается в значение «SyncMan записан». Контроллер копирует данные из SyncMan-2 в его собственную область памяти только при условии, что в момент Sync1 установлено состояние «SyncMan записан». И, наоборот – данные не копируются, если статус «SyncMan записан» не установлен (см. рисунок выше, метка F2).
Если данные не будут дважды благополучно скопированы – контроллер выдаст ошибку F415, и соответствующая ось перейдет в состояние ожидания (стоп) с рампой «EStop ramp».
Допустимое отклонение наличия телеграммы в требуемый момент времени равно нулю, т. е. не допустимо! EtherCAT-мастер должен обеспечить своевременное поступление данных в SyncMan-2.
Как пример, можно рассмотреть наличие «дрожания» (jitter), из-за которого отклонение времени прибытия не равно нулю и телеграмма прибыла с опозданием; что может вызвать срыв синхронизации.
Ошибка F415
Распределенные часы: нарушена синхронизация данных.
- Таймер контроллера регулярно генерирует прерывания (по умолчанию, базовое время (base time) = 1мсек).
- Отдельные задачи обрабатывается диспетчером задач в соответствии с внутренними правилами системы (их нельзя изменить, но можно повлиять на них, см. приоритеты задач).
- Если задача может отработать как больше, так и меньше времени, т. е. время ее выполнения сильно зависит от вычислительной нагрузки, то следует поместить процесс обновления данных «I/O Update» перед началом задачи (включить параметр задачи «I/O at task begin»). Это исключит одну из причин некорректной синхронизации.
- С помощью процесса «I/O Update» результирующие данные передаются в подсистему TwinCAT-IO и впоследствии будут отправлены в виде телеграммы для подсоединенных устройств. EtherCAT-телеграмма пробежит через все устройства и сбросит и/или подберет данные соответствующих устройств.
- Порядок обработки задач зависит от приоритета задачи. Задача с большим приоритетом обрабатывается в первую очередь и раньше других отправляет данные в TwinCAT-IO подсистему (которая занимается обработкой телеграмм). Проблемы обычно появляются, когда отдельные задачи имеют различную длину времени цикла выполнения и в какой то момент могут начать конкурировать за место в телеграмме.
- Асинхронные задачи могут вмешаться в произвольный момент времени и разрушить синхронизацию.
|
|
Ремонт сервоприводов Beckhoff в Газахе

Ремонт сервоприводов Beckhoff в Газахе, одна из многих услуг предлагаемых сервисным центром «РемПромЭл». Сервопривод относится к сложной промышленной электронике и состоит из двух взаимосвязанных составляющих- это электронная и силовая часть. Подобное конструктивное исполнение значительно усложняет ремонт сервоприводов Beckhoff.
Сервопривода достаточно распространенное промышленное оборудование, и как все подвержены износу. В зависимости от интенсивности использования, нагрузки, среды в которой работает оборудования сервопривода выходят из строя останавливая рабочий процесс.
В целях сомнительной «экономии» некоторые пытаются провести ремонт сервоусилителя Beckhoff самостоятельно на территории производства. Зачастую данные действия приводят к значительному удорожанию ремонта а при самом неблагоприятном исходе могут привести к не ремонтопригодности серводрайвера.
В виду вышесказанного, настоятельно рекомендуем, не пытайтесь проводить ремонт сервоприводов Beckhoff своими силами, обратитесь за помощью к специалистам. Современный специализированный сервисный центр имеет в наличии весь необходимый инструмент, включая специальное диагностическое оборудование, а компетентный персонал проведет качественный ремонт сервоприводов Beckhoff в Газахе, дополнительно сервисные центры дают гарантию на проведенные ремонтные работы.
Ремонт сервоприводов Beckhoff в СЦ «РемПромЭл»

Ремонт сервоприводов Beckhoff в сервисном центре самое разумное и экономически выгодное решение. Грамотные специалисты со знанием дела проведут глубокую диагностику неисправного блока и последующий ремонт сервопривода Beckhoff в кратчайшие сроки. К написанному можно добавить то, что каждый без исключения ремонт сервопривода Beckhoff в СЦ «РемПромЭл» проводится с применением оригинальных запасных частей.
В 2013-ом году специалистами компании был проведен первый ремонт сервопривода Beckhoff положивший начало дальнейшему развитию в данном направлении. За прошедшее время были отремонтированы сотни единиц промышленного оборудования и накоплен колоссальный, бесценный опыт в ремонте сервоприводов различных производителей.
Сервисный центр «РемПромЭл» оснащен самым современным диагностическим и ремонтным оборудованием, имеются в наличии расходные материалы, а так же на складе компании богатый выбор оригинальных запасных частей, что дает возможность провести качественный ремонт сервоприводов Beckhoff.
Обратившись в СЦ за ремонтом сервоприводов вы получите:
- Глубокую диагностику с выявлением неисправного компонента;
- Чистку неисправного блока;
- Ремонт сервопривода Beckhoff в кратчайшие сроки;
- Настройка сервоусилителя;
- Проверку отремонтированного блока на специальном стенде в условиях максимально приближенных к реальным;
- Видео проверки отремонтированного серводрайвера.
Отдельное внимание мы уделяем качеству проведения ремонта и даем гарантию на ремонт сервоприводов Beckhoff, а так же на замененные в процессе ремонта запасные части и расходные материалы 6 месяцев.
Настройка сервоусилителей Beckhoff в Газахе

Настройка сервоприводов (сервоусилителей) — это заключительный этап ремонта и в тоже время очень важный. Для правильной работы восстановленного блока просто необходимо провести грамотное программирование сервоусилителя. Ремонт и дальнейшую настройку сервоприводов выполняют разные специалисты, так как подобная работа довольно сложная и имеет свою специфику.
Настройка сервоусилителей или как еще называют программирование сервоприводов Beckhoff, неотъемлемая часть процесса реанимирования, ввиду того, что ремонт силовой части это только половина мероприятий направленных на восстановление работоспособности сервоприводов.
В некоторых случаях возникает необходимость провести программирование сервоусилителя без его ремонта. Причин по которым может возникнуть подобная необходимость масса.
Настройка сервоуслилтелей Beckhoff в Газахе может быть и отдельной услугой предоставляемой сервисным центром «РемПромЭл». Инженеры компании проведут необходимую настройку сервоприводов не только на территории сервисного центра, при необходимости можно заказать услугу выезда специалиста на территорию заказчика (по предварительной договоренности).
От качественной настройки сервоусилителя зависит правильная и безаварийная работа связки сервопривода и серводвигателя, а для этого требуется не много, просто программирование сервопривода Beckhoff должен проводить компетентный персонал с богатым опытом по настройке сервоуслилтелей.
Подключение сервопривода Beckhoff

Подключение сервопривода Beckhoff к оборудованию заказчика это еще одна услуга предоставляемая нашей компанией.
При необходимости специалист центра выполнит подключение сервопривода Beckhoff с выездом на территорию заказчика.
В некоторых случаях на производстве может быть дефицит квалифицированны кадров которые могли бы произвести качественное подключение сервопривода, именно по этому мы предлагаем услуги нашего сервисного центра.
Свяжитесь с нашими менеджерами, закажите выезд специалиста, и подключением сервопривода Beckhoff займется инженер сервисного центра. В случае заказа на подключение сервопривода Beckhoff силами наших специалистов вы получаете гарантию качества и работоспособности вашего оборудования.
Доверяя работу по подключению сервопривода Beckhoff профессионалам, вы избавляетесь от головной боли и гарантированно получаете работающее оборудование в кратчайшие сроки за разумную цену.
Ошибки сервопривода Beckhoff

Многие сервопривода данного производителя, за редким исключением оснащен информационной панелью с помощью которой проходит процесс программирования сервоприводов, а так же на ней в случае нештатной ситуации отображается код ошибки которая привела к остановке оборудования.
У каждого производителя разные коды ошибок у кого то это могут быть цифровые обозначения у кого то буквенные, но вся прелесть заключается в том, что открыв документацию и расшифровав код ошибки сервопривода мы с большой долей вероятности можем исправить эту ошибку на месте, сбросить ее на сервоприводе и запустить оборудование заново.
К сожалению не все ошибки сервоприводов можно исправить и сбросить самостоятельно, в некоторых случаях придется обращаться к специалистам сервисного центра.
Самые распространенные ошибки сервоприводов:
- Превышение тока;
- Перенапряжение или недостаточное напряжение;
- Перегрузка;
- Ошибка сигнала энкодера;
- Превышение температуры IGBT-модуля ;
- Ошибка связи;
- Обрыв фазы питания;
- Короткое замыкание.
Это не полный список распространенных ошибок сервоприводов которые можно сбросить самостоятельно без обращения к специалистам.
Коды ошибок сервопривода Beckhoff AX2000
Для индикации отказа (ошибки) используется красный светодиод. Предупреждение или сообщение об отказе на дисплее панели управления указывает на нештатное состояние привода. Пользуясь информацией, приведенной в таблице ниже, можно определить причины большинства возникающих неисправностей и отказов и устранить их. При возникновении затруднений обратитесь в сервисный центр. Четырехзначный код в скобках после сообщения относится к интерфейсу Fieldbus.
| Код ошибки | Обозначение | Объяснение |
|---|---|---|
|
E / S / A / P |
Сообщения о состоянии. |
Сообщения о состоянии, ошибок нет. |
|
. . . |
Сообщения о состоянии. |
Обновление начальной конфигурации. |
|
— |
Сообщения о состоянии. |
Режим программирования. |
|
F01* |
Температура радиатора. | Слишком высокая температура радиатора ограничение установлено производителем на 80°. |
| F02* | Перенапряжение. | Перенапряжение в звене шины постоянного тока предел зависит от напряжения питания. |
| F03* | Следующая ошибка. |
Сообщение от регулятора положения. |
| F04 | Обратная связь. | Обрыв кабеля, короткое замыкание, замыкание на массу. |
| F05* | Пониженное напряжение. | Пониженное напряжение в звене шины постоянного тока ограничение установлено производителем на 100В. |
| F06 | Температура двигателя. | Слишком высокая температура двигателя или темп. дефект датчика ограничение установлено производителем на 145°C. |
| F07 | Внутреннее питание. | Напряжение питания внутреннего усилителя выходит за допустимые пределы. |
| F08* | Превышение скорости. | Скорость двигателя слишком высокая. |
| F09 | EEPROM. | Ошибка контрольной суммы. |
| F10 | Flash-EPROM. | Ошибка контрольной суммы. |
| F11 | Тормоз. | Обрыв кабеля, короткое замыкание, замыкание на массу. |
| F12 | Фаза двигателя. | Отсутствует фаза двигателя (обрыв кабеля или подобное). |
| F13* | Внутренняя температура. | Слишком высокая внутренняя температура. |
| F14 | Выходной каскад. | Неисправность выходного каскада мощности. |
| F15 | I²t макс. | I²t максимальное значение превышено. |
| F16* | Питание BTB/RTO. | Отсутствуют 2 или 3 фазы в питающей сети. |
| F17 | аналого-цифровой преобразователь. | Ошибка аналого-цифрового преобразования, вызванная экстремальными электромагнитными помехами. |
| F18 | Рекуперация. | Цепь рекуперации неисправна или неправильная настройка. |
| F19* | Питающая фаза. | Отсутствует фаза в подаче питания от сети (можно отключить для 2-фазного режима). |
| F20 | Ошибка слота. | Ошибка слота (аппаратный сбой на плате расширения). |
Все возможные ошибки сервопривода Beckhoff AX2000 — Скачать в формате PDF
Типы сервоприводов Beckhoff
| Сервопривод | Тип сервопривода |
|---|---|
|
Beckhoff |
AX2003-B900-0001; AX2006-6A S60600-520; AX2006-AS S60601-520; AX2516-B200 S406M; AX2003-B110-0000 S60300-520; AX2003-B110-0000 S60300-520; AX5203 AX5201-LT00-4-V2; AX5203 AX5203-LT00-3; AX2020-B900-0000; AX2513-B750-0000; AX2513-B750 S443M-SE-520; AX2503-S403-M-SE; Al2406-0001-0001; AX2516-B750; AX2513-B310; AX2523-B310; AX2020-B750-0000; AX2513-B900; AX2516-B900; AX2020-B110-0000; AX2003-AS-S60301-520; AX2020 S62000-520; AX2003-B110-0000; AX2503-B750; AX2503-B200; AX2523-B750-0000; AX5201-0000-FS; AX2003 S60300-520; AX2006 S60600-520; AX5021-0000; AX2526-B900; AX2523-B900 |
Указанные в таблице типы сервоприводов Beckhoff это далеко не все сервопривода данного производителя, ремонт которых производит наш сервисный центр. Мы предлагаем качественный ремонт сервоприводов в Газахе выпущенных не только под брендом Beckhoff инженеры центра выполнят ремонт сервоприводов абсолютно любых производителей и года выпуска.
Оставить заявку на ремонт сервопривода Beckhoff

Вы заинтересованы в качественном ремонте дорогостоящего промышленного оборудования силами специалистов нашего сервисного центра, Вы сделали правильный выбор, мы приложим максимум усилий для скорейшего восстановления вышедшего из строя серводрайвера, что позволит Вам максимально сократить простой оборудования и сэкономить значительную сумму.
У вас есть проблемы с сервоприводом? Вам нужен срочный ремонт сервопривода Beckhoff или других серий? Оставьте заявку на ремонт сервопривода Beckhoff в Газахе воспользовавшись одноименной кнопкой на сайте либо обратитесь к нашим менеджерам. Связаться с ними можно несколькими способами:

- Заказав обратный звонок (кнопка в правом верхнем углу сайта)
- Посредством чата (кнопка расположена с левой стороны сайта)
- Позвонив по номеру телефона: +7(927)610-78-70; +7(848)255-80-30
- Написав на электронную почту: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
- Перейти в начало статьи

- Manuals
- Brands
- Beckhoff Manuals
- Servo Drives
- AX5000 Series
- Function manual
-
Contents
-
Table of Contents
-
Troubleshooting
-
Bookmarks
Quick Links
Documentation
Function description
for servo drives of the series AX5000
Version:
Date:
1.5
2018-05-15
Related Manuals for Beckhoff AX5000 Series
Summary of Contents for Beckhoff AX5000 Series
-
Page 1
Documentation Function description for servo drives of the series AX5000 Version: Date: 2018-05-15… -
Page 3: Table Of Contents
Table of contents Table of contents 1 Foreword ………………………… 7 Documentation Issue Status…………………. 7 Notes on the documentation…………………. 8 2 For your safety………………………. 9 Staff qualification …………………….. 9 Description of symbols…………………… 10 3 Asynchronous motors — Special functions ………………. 11 P/I breakdown protection controller (BPC) ………………. 11 General information ……………………
-
Page 4
Table of contents 8.4.1 Parameterisation of the filter ……………….. 40 1st order phase correction filter ……………….. 41 8.5.1 Parameterisation of the filter ……………….. 42 9 I*t calculation in the AX5000 servo drive ……………….. 43 Special features in the case of an AX520x two-channel device ……….. 44 9.1.1 Taking AX5206 as an example ……………… 45 10 Configuration and control of the motor brake……………… 46… -
Page 5
Table of contents 19 Variable position interface…………………… 83 19.1 Functionality from firmware v2.10……………….. 83 19.1.1 Rotary feedback sample ……………….. 84 19.1.2 Linear feedback sample ……………….. 84 20 Velocity — Controller Structure ………………….. 85 20.1 Functionality from firmware v2.10……………….. 85 20.1.1 Setpoint value calculation ……………….. 86 20.1.2 Setpoint limiting…………………… 86 20.1.3 Velocity controller…………………. 86 20.1.4 Determining the actual velocity value (differentiation) …………. 86… -
Page 6
Table of contents Version: 1.5 Function description… -
Page 7: Foreword
This documentation was originally written in German. All other languages are derived from the German original. Product features Only the product features specified in the current user documentation are valid. Further information given on the product pages of the Beckhoff homepage, in emails or in other publications is not authoritative. Version Comment Chapter Update:…
-
Page 8: Notes On The Documentation
EP0851348, US6167425 with corresponding applications or registrations in various other countries. ® EtherCAT is registered trademark and patented technology, licensed by Beckhoff Automation GmbH, Germany Copyright © Beckhoff Automation GmbH & Co. KG, Germany. The reproduction, distribution and utilization of this document as well as the communication of its contents to others without express authorization are prohibited.
-
Page 9: For Your Safety
Beckhoff Automation GmbH & Co. KG. In addition, the following actions are excluded from the liability of Beckhoff Automation GmbH & Co. • Failure to comply with this documentation •…
-
Page 10: Description Of Symbols
For your safety Description of symbols In this documentation the following symbols are used with an accompanying safety instruction or note. The safety instructions must be read carefully and followed without fail! Symbols that warn of personal injury: Serious risk of injury! This is an extremely dangerous situation.
-
Page 11: Asynchronous Motors — Special Functions
Asynchronous motors — Special functions Asynchronous motors — Special functions The AX5000 features a wide range of integrated complex functions for operating an asynchronous motor, which in most other frequency converters cannot be implemented due to lower computing performance and lack of sensors.
-
Page 12: General Information
Asynchronous motors — Special functions General information Speed reduction due to sudden load increase at constant speed in one the processing operation (for example ingression of a drill in solid material) is started with the Firmware v2.03 using the break down protection controller (BPC).
-
Page 13: Functionality From Firmware V2.03
Asynchronous motors — Special functions 3.2.1 Functionality from firmware v2.03 Mode of functioning of the breakdown protection controller The breakdown protection controller attempts to avoid the impermissible range (actual current value in %). This is defined in advance in parameter P-0-0115 (ASM: stall protection loop, torque limit value). If a machining procedure exceeds the I value, the servo drive reduces the set speed (reduction to ≤…
-
Page 14: Configuration
Asynchronous motors — Special functions 3.2.2 Configuration Joint operation of the breakdown protection controller and the acceleration controller! To use the breakdown protection controller and the acceleration controller together, the two Note IDNs P-0-0115 and P-0-0112 should have different values. Activation and setting of the breakdown protection controller properties To activate the control structure of the breakdown protection controller [item 3], go in the Drive Manager to Channel A →…
-
Page 15: Acceleration Pre-Control
Acceleration pre-control Acceleration pre-control The lag error of an axis during acceleration can be minimized with the aid of the acceleration pre-control. This can, for example, shorten the cycle times of handling axes or improved the path fidelity of CNC axes. The meaning of the parameters in conjunction with the acceleration pre-control is explained in the following chapters.
-
Page 16
Acceleration pre-control Procedure First of all, optimise the axis with the linear interpolation. To do this, record the current, velocity command value, actual velocity and lag error with the oscilloscope. Then activate the cubic interpolation as shown above and add the parameter P-0-0505 to the process data: If you record the value of the «velocity controller output»… -
Page 17: Change To Compatible Type
Note Further information can be found under: www.beckhoff.com → Automation → TwinCAT 3 → Documentation Change to Compatible Type in the case of AX5000 servo drive With the Change to Compatible Type function, TwinCAT offers an exchange of the AX5000 servo drive (larger range of functions or performance, see above) and/or the revision, taking into account the links in the task.
-
Page 18
Change to compatible type Example scenarios for the handling of the Change to Compatible Type function Scenario Example and feasibility of the Change to Compatible Type Firmware Update: Initial situation: A TwinCAT configuration exists. Intention: A firmware update is to be carried out on the AX5000 servo drive. Explanation: The new firmware uses a more up-to-date interface. -
Page 19: Functional Description
Change to compatible type Functional description Data backup! Beckhoff Automation GmbH & Co. KG recommends that you make a backup of your Twin- CAT project and the data of your configuration before executing the function. Note Step 1 Step 2 •…
-
Page 20
Once steps 1 – 4 have been completed, the changes are adopted into the startup list in parameter P-0-0010. These are then compared with the Beckhoff-AX5xxx.xml defined standard configurations. Aborting and restarting the function! It is possible at all times to stop and restart the function. -
Page 21: Term Definitions
Further information about the order key can be found in the: AX5000 – system manual under product identification! Note In the case of the AX5000 servo drives, Beckhoff makes a distinction between HardWare 1 and HardWare 2 devices. Firmware (version): The firmware is the software of the AX5000 servo drive.
-
Page 22: Digital Inputs And Outputs
Digital inputs and outputs Digital inputs and outputs The AX5000 servo drive can be used to activate various functions via digital inputs and outputs. The functions are assigned via eight inputs (0-7); input 7 can be configured as output. The individual functions are described in this chapter.
-
Page 23: Hardware-Enable
Digital inputs and outputs Set output on Error (C1D) 0: No The specified output (Digital output 7) does not respond to a C1D error. 1: Yes The specified output (digital output 7) responds to a C1D error. The error is displayed on the AX5000. Default value: 0 No Set output on warning (C2D) 0: No…
-
Page 24: Limit Switch Monitoring
Digital inputs and outputs Diagnostics 0: Error If axis control is active (enabled) and the hardware enable input is switched off, the AX5000 servo drive reports error message F102 (loss of the hardware enable). 3: Silent If axis control is active (enabled) and the hardware enable input is switched off, the AX5000 servo drive reports no error.
-
Page 25: Ready To Operate
Digital inputs and outputs Input number Under this setting in parameter P-0-0401 you can specify which digital input is to be configured with the function „Position limit switch“. You can assign the function to one of eight digital inputs (0-7). Configuration of the positive and negative limit switch The positive and negative limit switch can be configured in parameter P-0-0401.
-
Page 26: Comissioning A Generic Encoder With Biss-C Interface
Comissioning a Generic Encoder with BISS-C Interface Comissioning a Generic Encoder with BISS-C Interface Preface BISS-C is an open standard for communication with a rotary or linear feedback device and is used by various encoder manufacturers. The AX5000 does support this interface in general. Due to the many possible variations we now offer a generic encoder XML file for rotary encoders and for linear encoders that can be used and adjusted to many different encoders with BISS C interface.
-
Page 27: Wiring
Comissioning a Generic Encoder with BISS-C Interface Wiring Correct wiring, of course, is essential to run any feedback device correctly. Depending on wether or not there are sense lines for the power supply there are 2 or 4 wires for the supply voltage: Signal Description AX5000…
-
Page 28: Selecting The Feedback
Comissioning a Generic Encoder with BISS-C Interface Selecting the Feedback Use the «Select Feedback» button and choose either «Rotational» or «Linear Motorfeedbacks». Choose «BISS_C Generic 5V 1Vpp» if you do have an encoder with Sine/ Cosine signals. Choose «BISS_C Generic 5V»…
-
Page 29: Definition Of Parameter P-0-0150
Comissioning a Generic Encoder with BISS-C Interface Definition of Parameter P-0-0150 7.7.1 Feedback Type string The name of the encoder is not important for operation. It may be changed to remember what encoder you are using: 7.7.2 Power Settings Please choose the correct power supply accoding to the datasheet of your encoder. Correct voltage and «sense»…
-
Page 30: Process Channel
Comissioning a Generic Encoder with BISS-C Interface 7.7.3 Process Channel «Process interface» is «1: Sin / Cos with 1 V peak to peak» in case the encoder provides those signals. In case of pure digital communication it is » 5: Digital interface». Doublecheck the connector setting.
-
Page 31: Parameter Channel
Comissioning a Generic Encoder with BISS-C Interface 7.7.4 Parameter Channel Parameter Explanation Parameter interface 6: BISS C-Mode unidirectional (Do not change!) Connector Doublecheck where you connected the encoder. Identifier Not used, keep 0. Bit resolution singleturn position For a rotary encoder: Get number of singleturn bits from encoder datasheet.
-
Page 32: Parameter Channel / Data / Biss
Comissioning a Generic Encoder with BISS-C Interface 7.7.5 Parameter Channel / Data / BISS Most encoders will run with the preset default values. Do not change any settings unless you are sure that your specific encoder requires that! Some explanations (referring to the numbers in the picture): 1.
-
Page 33: Restrictions For Clock Frequency
Comissioning a Generic Encoder with BISS-C Interface Restrictions for Clock Frequency Firmware ≥ v2.10 build 0015 allows setting different frequency values. Possible values of the clock frequency to be set: 2000, 2500, 3333, 5000 [kHz]. The clock frequency can be changed in the parameter P-0-0150 under: Note Parameter channel →…
-
Page 34: Troubleshooting
Comissioning a Generic Encoder with BISS-C Interface Example 1 Example 2 Transmission time = 4 µs + 37 x 0.3 µs = 15.1 µs < Transmission time = 8 µs + 43 x 0.3 µs = 20.9 µs > 18 µs 18 µs ◦…
-
Page 35: Try Analog Signals Only
Comissioning a Generic Encoder with BISS-C Interface 7.9.1 Try analog signals only If you do have an encoder with BISS C interface and analogue signals you may choose a setup without using the digital interface. Choose «Unknown/ 1Vpp…» with the correct sense settings and resolution. If you get errors related to the sense line (e.g.
-
Page 36: Internal Velocity Filters
Internal velocity filters Internal velocity filters Warning, risk of injury from uncontrolled movements! When working with the described filters there is always a danger of the motor performing uncontrolled movements due to impermissible parameterization. Make sure that your appli- WARNING cation allows these movements and secure the entire danger zone against inadvertent en- try;…
-
Page 37: 1St And 2Nd Order Iir Filter — Infinite Impulse Response Filter
Internal velocity filters 1st and 2nd order IIR filter – Infinite Impulse Response Filter A general digital filter with time-discrete transfer function has been implemented for the current command value filter. The following filters can be selected in the TCDriveManager: •…
-
Page 38: Parameterisation Of The Filter
Internal velocity filters 8.3.1 Parameterisation of the filter Warning, risk of injury from uncontrolled movements! Impermissible attenuation values lead to a strong phase shift, which can result in uncon- trolled acceleration of the motor and other instable states. WARNING There are two different methods of parameterising the filter. «Classic»…
-
Page 39
Internal velocity filters «Low-pass and high-pass filter» method This variant is activated by unchecking the «Classic» checkbox (22). You must now determine and enter the parameters «Low pass filter damping» (23), «Low pass filter frequency» (24), «High pass filter damping» (26) and «High pass filter frequency»… -
Page 40: 1St Order Low Pass Filter
Internal velocity filters 1st order low pass filter The 1 order low pass filter attenuates all frequencies above the specified limit frequency. Select a servo drive (1) in the TwinCAT System Manager, start the TCDriveManager (2), click on the respective axis (3) and select the «Current command value filter»…
-
Page 41: 1St Order Phase Correction Filter
Internal velocity filters Example: With this example the frequency response of the PT1 filters has been illustrated for clarity. The Bode plot (logarithmic frequency curve) shows the amplitude over frequency in the upper area and the associated phase shift over frequency in the lower area. Seen together, it is recognisable that a phase shift results from the damping of the amplitude.
-
Page 42: Parameterisation Of The Filter
Internal velocity filters 8.5.1 Parameterisation of the filter Warning, risk of injury from uncontrolled movements! Impermissible damping values lead to a strong phase shift, which can result in uncontrolled acceleration of the motor and other instable states. WARNING This filter is parameterised with the parameters «Limit frequency»…
-
Page 43: T Calculation In The Ax5000 Servo Drive
I*t calculation in the AX5000 servo drive I*t calculation in the AX5000 servo drive Reference variables for the I*t calculation: P-0-0052; P-0-0090; P-0-0091; P-0-0092; P-0-0093 Note The I*t calculation serves as a safety function in the AX5000 servo drive. The max. permissible overcurrent time area (I*t ) depends on the size of the devices.
-
Page 44: Special Features In The Case Of An Ax520X Two-Channel Device
I*t calculation in the AX5000 servo drive Special features in the case of an AX520x two-channel device • The overcurrent time area for the total current of the device is determined by the size. • By default, the same values for rated and peak current are available to both channels. It is possible to increase the value of the rated current for one channel.
-
Page 45: Taking Ax5206 As An Example
I*t calculation in the AX5000 servo drive 9.1.1 Taking AX5206 as an example The rated current for channel A is increased to 6.6 A and the peak current set to 11 A. Reference values for the example calculation (channel A): Description Value S-0-0112…
-
Page 46: Configuration And Control Of The Motor Brake
P-0-0096; P-0-0097 Note If your servomotor is equipped with a motor brake, it is controlled via the AX5000 servo drive. For Beckhoff servomotors of the AM8000 series, the data for the motor brake are taken from the electronic type plate (or offline from the motor data files *.xeds).
-
Page 47
S-0-0124). Therefore the holding brake also acts on rotating axes. This can lead to increased wear and premature failure! Risk of injury through falling or moving axes! As a rule, holding brakes in Beckhoff servomotors are not designed for service braking of the axes! CAUTION Service braking causes increased wear of the holding brake! The service life would be reduced significantly. -
Page 48: Control
Configuration and control of the motor brake 10.2 Control The motor brake is generally controlled automatically via the AX5000 servo drive. For manual control, select the service function „Manual brake control“ in the TC3 Drive Manager. This function is described later in this chapter.
-
Page 49
Configuration and control of the motor brake Manual control of the motor brake for testing purposes In order to use the service function of the TC3 Drive Manager for the motor brake, select it in the TC3 Drive Manager under „Service functions → Manual brake control“. Default setting The default setting of the motor brake is „Automatic“. -
Page 50: Modulo
Modulo Modulo In a rotary multi-turn-feedback system the axis position may be difficult to determine once the maximum speed has been reached (overflow) and the machine is switched off and restarted. This problem can be avoided via the controller, although the solution is rather complex and requires a UPS that enables important data to be saved after a power failure.
-
Page 51: Operation With Modulo
Modulo taken into account the revolution in the range (a) and displays 7 motor revolutions, but only 1 application revolution + 144°; one motor revolution (72°) is missing. This problems occurs every 4096 motor revolutions and keeps growing by one motor revolution. In order to be able to determine the correct application position, the overruns or the resulting position offset must be stored on the application side.
-
Page 52: Parameterisation
Modulo 11.3 Parameterisation 11.3.1 Activating the modulo function Valid parameterization of the modulo function necessitates the setting of IDNs in the AX5000 as well as corresponding parameterization of the NC or CNC. It is recommended to commission the modulo function with the help of the TcDriveManager, since this also sets the NC or CNC parameterization correctly.
-
Page 53: Influenced Idns
Modulo P-0-0276 – „Modulo calculation control“ This IDN can be used to select whether the offset required for the modulo calculation is to be stored cyclically in the drive, and in a fail-safe manner. „0: Modulo data storage enabled“: This setting requires a multi-turn encoder, otherwise the necessary memory operations cannot be performed fast enough.
-
Page 54
Modulo S-0-0131 “Probe value 1 negative edge” Position value from the probe unit; this is converted in the same way as the actual value. S-0-0189 “Following distance” The position lag is not reduced to the modulo period. P-0-0010 “Feature flags”, bit 10, “Explicit modulo init data saving required” This bit is set from interface rev. -
Page 55: Maximum Possible Speed
Modulo 11.3.3 Maximum possible speed Activation of the modulo function may result in a relevant reduction of the maximum speed. Maximum speed: S-0-0103 S-0-0001 The above equation results in a limitation of the maximum value of IDN S-0-0091 «Bipolar velocity limit value» 11.4 Configuration To configure the modulo function, proceed as follows:…
-
Page 56
Modulo • Select the device “AX5203” (7). • Open the TCDriveManager (8). • Select the item “Modulo value” (9). • Define the modulo range in the preset unit (11). The TcDriveManager subsequently calculates the modulo value in the unit increments (10). Complete the input with “Accept”… -
Page 57: Prime Number Gears
Modulo 11.4.1 Prime number gears Prime number gears always have an odd number of teeth and are often used in practice to minimize wear of the individual teeth. If one gearwheel of a pair has a prime number as the number of teeth, the number of meshings of the same pair of teeth is minimized.
-
Page 58: Exchange
Modulo 11.4.2 Exchange The modulo position is no longer correct if the motor or servo drive is exchanged. To prevent mechanical damage in the case of an uncontrolled restart, the servo drive starts with an initialization error, which leads to the EtherCAT status being set to Err-PreOp.
-
Page 59: Resetting The Modulo Error
Modulo 11.4.3 Resetting the modulo error The following figure shows channel B with modulo error F351. The modulo error F350 / F51 can be reset using the System Manager / TCDriveManager or the PLC. Reset with the System Manager • Select the device “AX5203” (1). •…
-
Page 60: Clearing The Modulo Data
Modulo 11.4.4 Clearing the modulo data It is possible to clear the modulo data and reset the servo drive to the factory settings. • Disable the modulo function (1). • Complete the input with “Accept” (2). • Activate the configuration. •…
-
Page 61: Motor Types And Operation Modes
Motor types and operation modes Motor types and operation modes In this chapter the relationships between physical motor types, feedback systems and the necessary operation mode will be explained. Functionality from firmware v2.12 The firmware V2.12 enables the operation of voice coil motors with feedback system and (a)synchronous servomotors with and without feedback (sensorless regulation).
-
Page 62
Motor types and operation modes Functionality from firmware v2.06 to firmware v2.10 The firmware versions v2.06 — v2.10 allow the operation of synchronous servomotors with feedback and asynchronous servomotors without feedback. Structure of the parameter P-0-0050 (Motor construction type) The functional principle of the motor (asynchronous/synchro- nous) and the type of con-… -
Page 63: Parameter Set Switchover
Parameter set switchover Parameter set switchover Reference values for the parameter set switchover: S-0-0216; S-0-0217; S-0-0219; S-0-0254; P-0-0360; P-0-0361 Note The parameters of the AX5000 servo drive contain reference values or commands. A distinction is made between: • S-IDNs (e.g. S-0-0206): Standard Sercos parameters, which are automatically provided in the start-up list of the servo drive.
-
Page 64: Switching To A Parameter Set
Parameter set switchover 13.1 Switching to a parameter set Parameter sets are switched via IDN S-0-0216 «Switch parameter set (pc)». During the switchover the parameter listed in IDN S-0-0219 are switched to the parameter set with the number defined in IDN S-0-0217 (0-7).
-
Page 65: Probe Unit (Functionality)
Probe unit (functionality) Probe unit (functionality) A probe unit is a hardware-oriented functional group that can store the actual axis position for a parameterizable event. The event may be an edge of a digital input in the drive, for example. The position is stored immediately without significant delay for subsequent evaluation by the control system.
-
Page 66
Probe unit (functionality) The following window (left) appears for a configuration with „Refer- ence signal feedback“ . • Confirm with OK The «Feedback 1» menu appears. • Select the source of the «Feedback reference signal» (usually „Zero index“). Further settings are required in the «Probe unit» window (left). •… -
Page 67: Position Offset
TwinCAT 3 for saving or modifying the offset from a user program: The description of this PLC function block can be found in the Beckhoff Online Infosys, for example. The offset is stored in increments. The TC Drive Manager should therefore be used for entering or modifying the offset without a PLC program.
-
Page 68
Position offset If the AX5000 is linked to a CNC axis, the TC Drive Manager does not «know» the feed constant. The window shows fewer data, and the offset must be entered in increments. The «Table View» button (5) can be used to switch the view in both cases (NC or CNC) (see diagram below). -
Page 69: Idn-Description
Position offset Delete position offset To delete a stored offset, enter the value 0 and select the memory location to be deleted (encoder or servo drive): Click «Activate» and confirm the error message that appears (bottom diagram) with OK: Then select «No position offset» (1) and click «Activate»…
-
Page 70: Power Management
Power Management Power Management Power management reference values: P-0-0201; P-0-0202; P-0-0203; P-0-0214 Note The AX5000 is normally operated with a 3-phase AC voltage. This is rectified in the device with the aid of a bridge rectifier and charges the DC link. Furthermore, there is an option to input a DC voltage. Parameterization: •…
-
Page 71: Dc Supply
Power Management 16.2 DC supply For special applications it may be useful to input a DC voltage. Several things need to be observed for the connection and the parameter settings, which are described below. The DC voltage can be connected: •…
-
Page 72: Diagnostics For External Brake Resistors
Power Management The settings in the Power Management Control Word (P-0-0204) marked below are important in the case of input via X02 (from firmware V2.10): Important! With the parameterization “Disable Umain loss monitoring”, the device protection with regard to mains voltage interruptions at X01 is switched off. Therefore, only switch the monitors off in case of DC input at X02.
-
Page 73
Duty cycle (DC) = switch-on time / cycle time (machine cycle) x 100% Beckhoff specifies an overload factor for the brake resistors, depending on the duty cycle (see diagram below): Multiplied by the power rating, the permissible short-term power results from the overload factor dependent on the duty cycle: Short-term power = Power rating x Overload factor (ÜF) -
Page 74: Dc Link Charging And Monitoring
Power Management 16.4 DC link charging and monitoring The new state machines for “Umain” and “DC link charging” ensure high availability and at the same time improved protection of the servo drive. Basis is the fast measurement of the mains (X01) and DC link voltage. All servo drives in a common DC link group must have a firmware version ≥…
-
Page 75: Thermal Motor Model
The motor data for Beckhoff servo motors from the series AM8000 originate from the electronic name plate (offline from the motor data files *.xeds). The motor data generator can be used to create motor data files for third-party motors.
-
Page 76: Parameter Description
Time constant 2 Represents the thermal time constant of the winding. In the case of Beckhoff motors, the value of this time constant exists both in the electronic name plate and in the motor data sets. Partial fraction factor Divides the thermal resistance.
-
Page 77: Torque (Force) — Controller Structure
Torque (Force) – Controller Structure Torque (Force) – Controller Structure Terminology Based on this documentation, the term that is usually used for the functional description of the torque and Note force controller structure is torque controller structure. Force controller structure is used for linear motors.
-
Page 78: Setpoint Value Calculation
This current setpoint is then fed to the current controller. The actual torque for the actual current is also based on the motor torque characteristic. When the torque controller is used with Beckhoff motors, the data required for the motor torque characteristic are included in the electronic type plate or the motor data files (.xeds).
-
Page 79: Current Controller
(compromise between dynamics and noise generation). For Beckhoff motors the settings for the optimum bandwidth are taken from the electronic type plate (or offline from the motor data files *.xeds). For the most applications these settings can be left unchanged. The motor data generator can be used to create motor data files for third-party motors.
-
Page 80: Functionality Up To Firmware V2.06
Torque (Force) – Controller Structure 18.2 Functionality up to firmware v2.06 Description of the function blocks All firmware v2.06 function blocks that were not described specifically (lower diagram) are equivalent to the function blocks of the block diagram for firmware v2.10. Note The current controller structure enables the current requirement of the speed controller to be met.
-
Page 81: Parameter Description
Torque (Force) – Controller Structure 18.3 Parameter description IDN P-0-0074 (Motor torque characteristic) The parameter contains 10 ordered pairs of numbers. They describe the relationship between torque-forming current and torque, as a function of M = f (l IDN P-0-0092 (Configured channel peak current) Preset peak current of the channel.
-
Page 82
Torque (Force) – Controller Structure IDN S-0-0083 (Negativ torque limit value) The parameter limits the set torque/force value of the controller. The lower negative limit is specified (unipolar neg.). If the value falls below this, the drive sets bit 3 of S-0-0013. The reference value is P-0-0092 and P-0-0094 (from firmware v2.10). -
Page 83: Variable Position Interface
Variable position interface Variable position interface Reference values for the variable position interface: S-0-0051; S-0-0053; S-0-0079 Note If the AX5000 is to transfer a single-turn position with a resolution of more than 20 bits to the controller, the variable position interface must be used. The position of the axis is recorded in the AX5000 and handed over to the controller in S-0-0051 with a data length of 32 bits.
-
Page 84: Rotary Feedback Sample
Variable position interface If parameter S-0-0079 is changed manually and not via the TC Drive Manager, note that a decimal number is used there which corresponds to 2 , where n = [20-30]. The PLC function block FUNCTION_BLOCK FB_SoEwrite is used for manual configuration of the parameter S-0-0079. The following possible values thus result: max.
-
Page 85: Velocity — Controller Structure
Velocity — Controller Structure Velocity — Controller Structure Terminology The terminology used in this documentation primarily refers to rotary motors (e.g. actual velocity value). Note Reference values for the velocity controller structure: S-0-0032; S-0-0036; S-0-0037; S-0-0040; S-0-0081; S-0-0084; S-0-0091; P-0-0003; P-0-0504;…
-
Page 86: Setpoint Value Calculation
Velocity — Controller Structure 20.1.1 Setpoint value calculation Depending on the set operation mode (S-0-0032) the control value (P-0-0558) for the position controller is provided as velocity command value or directly from the interface (S-0-0036). The pre-control value (S-0-0037) is then added. 20.1.2 Setpoint limiting Setpoint limiting (see block diagram on page 1) affects the velocity command value.
-
Page 87
Velocity — Controller Structure Functionality from firmware v2.10 From firmware v2.10, in addition to a third-order observer („Basic mode“), a fifth-order observer («Advanced mode») is available for special applications. In Basic mode the position signal calculated from the velocity signal is attenuated with 20 dB / decade above the bandwidth. -
Page 88
Velocity — Controller Structure The Bode diagram shows that system peaking at approx. 380 Hz disappears after activation of the Velocity Observer, since the open-loop phase shift is lower with activated Velocity Observer from approx. 100 Hz. The result is a larger phase margin: The green line was recorded with the Observer switched off, the red line with the Observer switched on. -
Page 89
Velocity — Controller Structure 20.1.5.4 Description of IDN P-0-0514 Mode Default value: 1 Basic Observer Here you can choose between the following settings: • 0: Off = Velocity Observer not active • 1: = Basic Velocity Observer active in basic mode (3rd order) •… -
Page 90
Velocity — Controller Structure Damping Default value: 0.7 The value can only be changed in basic mode. The default value of 0.7 should remain unchanged, if possible. 20.1.5.5 Velocity Observer parameter description IDN P-0-0070 (Motor continiuous stall torque) Standstill torque of the motor (according to data sheet) Unit: newton meter (Nm) IDN P-0-0071 (Mechanical Motor Data) Rotor moment of inertia of the motor (from the electronic type plate) and motor-related moment of inertia of… -
Page 91: Determining The Actual Velocity Value (Velocity Observer)
Velocity — Controller Structure 20.2 Functionality up to firmware v2.06 Description of the function blocks All firmware v2.06 function blocks that were not described specifically (lower diagram) are identical to the function blocks of the block diagram for firmware v2.10. Note This results in the following relationship for the velocity: Parameter P-0-0519 contains the result of the differentiation of the position signal.
-
Page 92: Parameter Description
Velocity — Controller Structure 20.3 Parameter description IDN S-0-0036 (Velocity command value) In the velocity controller, velocity command values are transferred cyclically from the controller to the servo drive via this parameter. The cycle time is specified in parameter S-0-0001. Unit: rev/(2 IDN S-0-0037 (Additive velocity command value) The parameter contains the additive velocity command value.
-
Page 93: Axis Deceleration Ramps
Axis deceleration ramps Axis deceleration ramps Serious injuries caused by moving axes! The deceleration ramps of the AX5000 servo drive are purely functional and not suitable for personal protection purposes! DANGER A fault in the drive system may have the following effects: — it may not be possible to enable the functional deceleration ramps;…
-
Page 94: Support And Service
Beckhoff’s branch offices and representatives Please contact your Beckhoff branch office or representative for local support and service on Beckhoff products! The addresses of Beckhoff’s branch offices and representatives round the world can be found on her internet pages: http://www.beckhoff.com You will also find further documentation for Beckhoff components there.
г. Москва
«18» Января 2022
Настоящая Политика конфиденциальности персональных данных (далее – Политика конфиденциальности) действует в отношении всей информации, которую ООО «ГИТРОН», сайт расположен на доменном имени www.gitron.ru, может получить о Пользователе во время использования сайта, программ и продуктов сайта.
1. ОПРЕДЕЛЕНИЕ ТЕРМИНОВ
1.1. В настоящей Политике конфиденциальности используются следующие термины:
1.1.1. «Администрация сайта» – уполномоченные сотрудники на управления сайтом, действующие от имени ООО «ГИТРОН», которые организуют и (или) осуществляет обработку персональных данных, а также определяет цели обработки персональных данных, состав персональных данных, подлежащих обработке, действия (операции), совершаемые с персональными данными.
1.1.2. «Персональные данные» — любая информация, относящаяся к прямо или косвенно определенному или определяемому физическому лицу (субъекту персональных данных).
1.1.3. «Обработка персональных данных» — любое действие (операция) или совокупность действий (операций), совершаемых с использованием средств автоматизации или без использования таких средств с персональными данными, включая сбор, запись, систематизацию, накопление, хранение, уточнение (обновление, изменение), извлечение, использование, передачу (распространение, предоставление, доступ), обезличивание, блокирование, удаление, уничтожение персональных данных.
1.1.4. «Конфиденциальность персональных данных» — обязательное для соблюдения Оператором или иным получившим доступ к персональным данным лицом требование не допускать их распространения без согласия субъекта персональных данных или наличия иного законного основания.
1.1.5. «Пользователь сайта (далее ‑ Пользователь)» – лицо, имеющее доступ к Сайту, посредством сети Интернет и использующее Сайт.
1.1.6. «Cookies» — небольшой фрагмент данных, отправленный веб-сервером и хранимый на компьютере пользователя, который веб-клиент или веб-браузер каждый раз пересылает веб-серверу в HTTP-запросе при попытке открыть страницу соответствующего сайта.
1.1.7. «IP-адрес» — уникальный сетевой адрес узла в компьютерной сети, построенной по протоколу IP.
2. ОБЩИЕ ПОЛОЖЕНИЯ
2.1. Использование Пользователем сайта означает согласие с настоящей Политикой конфиденциальности и условиями обработки персональных данных Пользователя.
2.2. В случае несогласия с условиями Политики конфиденциальности Пользователь должен прекратить использование сайта.
2.3. Настоящая Политика конфиденциальности применяется только к сайту ООО «ГИТРОН» www.gitron.ru. ООО «ГИТРОН» не контролирует и не несет ответственность за сайты третьих лиц, на которые Пользователь может перейти по ссылкам, доступным на сайте www.gitron.ru.
2.4. Администрация сайта не проверяет достоверность персональных данных, предоставляемых Пользователем сайта.
3. ПРЕДМЕТ ПОЛИТИКИ КОНФИДЕНЦИАЛЬНОСТИ
3.1. Настоящая Политика конфиденциальности устанавливает обязательства Администрации сайта по неразглашению и обеспечению режима защиты конфиденциальности персональных данных, которые Пользователь предоставляет по запросу Администрации сайта при регистрации на сайте или при оформлении запроса, формы обратной связи и других форм.
3.2. Персональные данные, разрешённые к обработке в рамках настоящей Политики конфиденциальности, предоставляются Пользователем путём заполнения форм на Сайте ООО «ГИТРОН» www.gitron.ru и включают в себя следующую информацию:
3.2.1. фамилию, имя, отчество Пользователя;
3.2.2. контактный телефон Пользователя;
3.2.3. адрес электронной почты (e-mail);
3.3. Сайт защищает Данные, которые автоматически передаются в процессе просмотра рекламных блоков и при посещении страниц, на которых установлен статистический скрипт системы («пиксель»):
•IP адрес;
•информация из cookies;
•информация о браузере (или иной программе, которая осуществляет доступ к показу рекламы);
•время доступа;
•адрес страницы, на которой расположен рекламный блок;
•реферер (адрес предыдущей страницы).
3.3.1. Отключение cookies может повлечь невозможность доступа к частям сайта, требующим авторизации.
3.3.2. Сайт осуществляет сбор статистики об IP-адресах своих посетителей. Данная информация используется с целью выявления и решения технических проблем.
3.4. Любая иная персональная информация неоговоренная выше (история покупок, используемые браузеры и операционные системы и т.д.) подлежит надежному хранению и нераспространению, за исключением случаев, предусмотренных в п.п. 5.2. и 5.3. настоящей Политики конфиденциальности.
4. ЦЕЛИ СБОРА ПЕРСОНАЛЬНОЙ ИНФОРМАЦИИ ПОЛЬЗОВАТЕЛЯ
4.1. Персональные данные Пользователя Администрация сайта может использовать в целях:
4.1.1. Идентификации Пользователя, зарегистрированного на сайте, для оформления заказа и (или) заключения Договора дистанционным способом с ООО «ГИТРОН».
4.1.2. Предоставления Пользователю доступа к персонализированным ресурсам Сайта.
4.1.3. Установления с Пользователем обратной связи, включая направление уведомлений, запросов, касающихся использования Сайта, оказания услуг, обработка запросов и заявок от Пользователя.
4.1.5. Подтверждения достоверности и полноты персональных данных, предоставленных Пользователем.
4.1.6. Создания учетной записи для совершения покупок, если Пользователь дал согласие на создание учетной записи.
4.1.7. Уведомления Пользователя Сайта о состоянии Заказа.
4.1.8. Предоставления Пользователю эффективной клиентской и технической поддержки при возникновении проблем связанных с использованием Сайта.
4.1.9. Предоставления Пользователю с его согласия, обновлений продукции, специальных предложений, информации о ценах, новостной рассылки и иных сведений от имени ООО «ГИТРОН» или от имени партнеров компании.
4.1.11. Осуществления рекламной деятельности с согласия Пользователя.
4.1.12. Предоставления доступа Пользователю на сайты или сервисы партнеров с целью получения продуктов, обновлений и услуг.
5. СПОСОБЫ И СРОКИ ОБРАБОТКИ ПЕРСОНАЛЬНОЙИНФОРМАЦИИ
5.1. Обработка персональных данных Пользователя осуществляется без ограничения срока, любым законным способом, в том числе в информационных системах персональных данных с использованием средств автоматизации или без использования таких средств.
5.2. Пользователь соглашается с тем, что Администрация сайта вправе передавать персональные данные третьим лицам, в частности, курьерским службам, организациями почтовой связи, операторам электросвязи, исключительно в целях выполнения заказа Пользователя, оформленного на Сайте ООО «ГИТРОН».
5.3. Персональные данные Пользователя могут быть переданы уполномоченным органам государственной власти Российской Федерации только по основаниям и в порядке, установленным законодательством Российской Федерации.
5.4. Администрация сайта принимает необходимые организационные и технические меры для защиты персональной информации Пользователя от неправомерного или случайного доступа, уничтожения, изменения, блокирования, копирования, распространения, а также от иных неправомерных действий третьих лиц.
6. ОБЯЗАТЕЛЬСТВА СТОРОН
6.1. Пользователь обязан:
6.1.1. Предоставить информацию о персональных данных, необходимую для пользования Сайтом.
6.1.2. Обновить, дополнить предоставленную информацию о персональных данных в случае изменения данной информации.
6.2. Администрация сайта обязана:
6.2.1. Использовать полученную информацию исключительно для целей, указанных в п. 4 настоящей Политики конфиденциальности.
6.2.2. Обеспечить хранение конфиденциальной информации в тайне, не разглашать без предварительного письменного разрешения Пользователя, а также не осуществлять продажу, обмен, опубликование, либо разглашение иными возможными способами переданных персональных данных Пользователя, за исключением п.п. 5.2. и 5.3. настоящей Политики Конфиденциальности.
6.2.3. Принимать меры предосторожности для защиты конфиденциальности персональных данных Пользователя согласно порядку, обычно используемого для защиты такого рода информации в существующем деловом обороте.
6.2.4. Осуществить блокирование персональных данных, относящихся к соответствующему Пользователю, с момента обращения или запроса Пользователя или его законного представителя либо уполномоченного органа по защите прав субъектов персональных данных на период проверки, в случае выявления недостоверных персональных данных или неправомерных действий.
7. ОТВЕТСТВЕННОСТЬ СТОРОН
7.1. Администрация сайта, не исполнившая свои обязательства, несёт ответственность за убытки, понесённые Пользователем в связи с неправомерным использованием персональных данных, в соответствии с законодательством Российской Федерации, за исключением случаев, предусмотренных п.п. 5.2., 5.3. и 7.2. настоящей Политики Конфиденциальности.
7.2. В случае утраты или разглашения Конфиденциальной информации Администрация сайта не несёт ответственность, если данная конфиденциальная информация:
7.2.1. Стала публичным достоянием до её утраты или разглашения.
7.2.2. Была получена от третьей стороны до момента её получения Администрацией сайта.
7.2.3. Была разглашена с согласия Пользователя.
8. РАЗРЕШЕНИЕ СПОРОВ
8.1. До обращения в суд с иском по спорам, возникающим из отношений между Пользователем сайта и Администрацией, обязательным является предъявление претензии (письменного предложения о добровольном урегулировании спора).
8.2 .Получатель претензии в течение 30 календарных дней со дня получения претензии, письменно уведомляет заявителя претензии о результатах рассмотрения претензии.
8.3. При не достижении соглашения спор будет передан на рассмотрение в судебный орган по месту нахождения Ответчика в соответствии с действующим законодательством Российской Федерации.
8.4. К настоящей Политике конфиденциальности и отношениям между Пользователем и Администрацией сайта применяется действующее законодательство Российской Федерации.
9. ДОПОЛНИТЕЛЬНЫЕ УСЛОВИЯ
9.1. Администрация сайта вправе вносить изменения в настоящую Политику конфиденциальности без согласия Пользователя.
9.2. Новая Политика конфиденциальности вступает в силу с момента ее размещения на Сайте, если иное не предусмотрено новой редакцией Политики конфиденциальности.
9.3. Все предложения или вопросы по настоящей Политике конфиденциальности следует сообщать указать раздел сайта интернет-магазина
9.4. Действующая Политика конфиденциальности размещена на странице по адресу http://gitron.ru/conf
9.6
Error messages
Any errors that occur are shown in coded form by an error number in the LED display on
the front panel. All error messages result in the BTB/RTO contact being opened, the out-
put stage being switched off (motor loses all torque), and the holding brake is activated.
Number Designation
Explanation
A/I/P/E
Status Messages
Status messages, no error, see p. 89
. . .
Status Message
Updating the startup configuration
F00
no error
no error on the selected axis module
F01*
Heat sink temperature
Heat sink temperature too high
limit is set by manufacturer to 80°
F02*
Overvoltage
Overvoltage in DC bus link
limit depends on the electrical supply voltage
F03*
Following error
Message from the position controller
F04
Feedback
Cable break, short-circuit, short to ground
F05*
Undervoltage
Undervoltage in DC bus link
limit is set by manufacturer to 100V
F06
Motor temperature
Motor temperature too high or temp. sensor defect
limit is set by manufacturer to 145°C
F07
Internal voltage
supply
Internal amplifier supply voltages are out of tolerance
F08*
Overspeed
Motor runs away, speed is too high
F09
EEPROM
Checksum error
F10
Flash-EPROM
Checksum error
F11
Brake
Cable break, short-circuit, short to ground
F12
Motor phase
Motor phase missing (cable break or similar)
F13*
Internal temperature
Internal temperature too high
F14
Output stage
Fault in the power output stage
F15
I²t max.
I²t maximum value exceeded
F16*
Supply BTB/RTO
2 or 3 phases missing in the mains supply feed
F17
A/D converter
Error in the analog-digital conversion, normally caused
by extreme electromagnetic interferences.
F18
Regen
Regen circuit faulty or incorrect setting
F19*
Supply phase
A phase is missing in the mains supply power feed
F20
Slot fault
Slot error (hardware fault on interface card)
F21
Handling error
Software error on the interface card
F22
reserved
reserved
F23
CAN-bus off
Severe CAN bus communication error
F24
Warning
Warning is displayed as fault
F25
Commutation error
Commutation error
F26
Limit switch
Homing error (hardware limit switch activated)
F27
reserved
reserved
F28
External Trajectory
External position profile generator created a step, that
exceeded the maximum value
F29
Sercos Error
only in SERCOS systems
F30
Emergency timeout
Timeout emergency stop
F31
Macro
Macro program error
F32
System Error
system software not responding correctly
* = these error messages can be cleared without a reset, by using the ASCII command
CLRFAULT. If only one of these errors is present and the RESET button or the I/O
RESET function is used, only the CLRFAULT command will be executed.
More information to the messages can be found in the ASCII Object Reference
(Online Help), see parameter ERRCODE. Hints for removal can be found in the
Online help chapter «Trouble-Shooting».
90
AX2500 Product Manual
Setup
06/2007
BECKHOFF